二维全约束优化算法的研究
二维板材排样问题的递归多块布局算法
二维板材排样问题的递归多块布局算法汇报人:日期:•引言•二维板材排样问题概述•递归多块布局算法设计•算法实现与实验验证•结论与展望01引言背景意义研究背景与意义国内外研究现状及发展趋势国内研究现状国外学者则注重于采用混合整数规划、粒子群优化等算法,并结合计算机视觉、深度学习等技术进行研究。
国外研究现状发展趋势研究内容本研究旨在研究一种基于递归多块布局算法的二维板材排样方案,解决现有技术的不足之处。
方法采用理论分析、实验验证和模拟仿真相结合的方法,对算法的有效性和优越性进行验证和评估。
研究内容和方法02二维板材排样问题概述二维板材排样问题定义问题的约束条件问题定义问题特点组合爆炸局部最优陷阱问题研究现状经典算法01启发式算法02现代优化技术0303递归多块布局算法设计算法基本思想030201算法实现流程算法复杂度分析时间复杂度由于算法采用分治策略,因此其时间复杂度取决于划分数目和递归深度。
通常来说,算法的时间复杂度较高,为指数级别。
空间复杂度算法的空间复杂度取决于划分数目和每个块的零件数量。
通常来说,算法的空间复杂度也较高,与问题规模成正比。
04算法实现与实验验证算法实现细节初始布局算法流程优化布局布局调整冲突检测在Windows操作系统上,使用Python语言实现算法,并使用标准测试数据集进行验证。
实验结果通过与基准算法进行比较,验证了该算法在求解二维板材排样问题方面的优越性。
实验环境实验验证及结果分析VS结果对比与分析结果对比分析05结论与展望研究成果总结通过实验验证,该算法具有较高的效率和可行性,能够得到最优解或近似最优解。
与现有算法相比,该算法具有更快的运行速度和更好的空间利用率。
提出了一种新的递归算法,能够有效地解决二维板材排样问题。
研究不足与展望该算法在处理大型问题时,可能需要较长的运行时间和较大的计算资源。
在实际应用中,可能需要对算法进行优化和改进,以满足特定的需求和条件。
需要进一步研究该算法在其他领域的应用,例如三维板材排样、电路板布线等。
运筹学中的最优路径规划算法研究与优化
运筹学中的最优路径规划算法研究与优化运筹学是研究在特定的限制条件下如何做出最佳决策的学科。
在运筹学中,最优路径规划是一项重要的研究内容。
最优路径规划的目标是找到在给定条件下从起点到终点的最短路径或最优路径。
这项技术广泛应用于物流管理、交通规划、航空航天、电子商务和人工智能等领域,为提高效率、降低成本和优化资源利用提供了良好的支持。
运筹学中的最优路径规划算法有很多种,每种算法都有其独特的优势和适用场景。
下面将重点介绍几种常见的最优路径规划算法和其优化方法。
(一)迪杰斯特拉算法(Dijkstra Algorithm)迪杰斯特拉算法是一种广泛应用的单源最短路径算法,用于解决带有非负权值的有向图或无向图的最短路径问题。
该算法通过不断更新起点到各个节点的最短距离来找到最短路径。
迪杰斯特拉算法的基本思想是从起点出发,选择当前距离起点最近的节点,并将该节点加入到已访问的节点集合中。
然后,更新与该节点相邻的节点的最短距离,并选择下一个最短距离的节点进行扩展。
直到扩展到终点或者所有节点都被访问过为止。
为了优化迪杰斯特拉算法的性能,可以使用优先队列(Priority Queue)来选择下一个节点。
优先队列可以根据节点的最短距离进行排序,使得选择下一个节点的过程更加高效。
(二)贝尔曼福特算法(Bellman-Ford Algorithm)贝尔曼福特算法是一种用于解决任意两节点之间的最短路径问题的算法,可以处理带有负权边的图。
该算法通过对图中所有边进行多次松弛操作来得到最短路径。
贝尔曼福特算法的基本思想是从起点到终点的最短路径包含的最多边数为n-1条(n为节点数),因此算法进行n-1次松弛操作。
每次松弛操作都会尝试更新所有边的最短距离,直到无法再进行松弛操作为止。
为了优化贝尔曼福特算法的性能,可以使用改进的贝尔曼福特算法。
改进的贝尔曼福特算法通过剪枝操作去除不必要的松弛操作,从而减少算法的时间复杂度。
(三)弗洛伊德算法(Floyd Algorithm)弗洛伊德算法是一种解决带有负权边的图的任意两节点之间最短路径问题的算法。
二维不规则图形下料排样优化算法研究的开题报告

二维不规则图形下料排样优化算法研究的开题报告1、研究背景和意义二维不规则图形排样优化问题已经广泛应用于机械制造、纺织、造纸、电子元器件、板材等多个领域。
其目的是尽可能地利用原材料,并减少原材料的浪费,从而提高生产效率和降低成本。
因此,研究二维不规则图形排样优化算法具有重大的理论和实际意义。
2、研究内容与目标本文将针对二维不规则图形排样优化问题,进行深入的研究,主要包括以下内容:(1) 完成二维不规则图形排样问题的定义、模型建立及其特点分析;(2) 探究传统排样算法所存在的问题,并介绍算法改进策略;(3) 提出新的二维不规则图形排样优化算法,并与传统算法进行效果比较;(4) 通过模拟实验,分析和验证新算法的可行性和有效性。
3、研究方法和思路(1) 文献综述法:对二维不规则图形排样优化问题研究的国内外现状及发展趋势进行全面的梳理和总结,了解现有算法的优缺点,为提出新的算法奠定基础。
(2) 算法设计法:设计新的二维不规则图形排样优化算法,力求达到更高的效率和更好的效果,并通过实验来验证和分析其可行性和优越性。
(3) 实验分析法:用不同的数据集来测试新的算法的性能,并对算法进行比较和分析。
4、预期结果与创新点本文预期通过对不规则图形排样优化问题的研究,提出一种高效稳定的新算法,以解决目前排样算法在实际应用中存在的问题。
该算法可以使排样过程更好地适应实际应用需求,从而降低生产成本,提升企业效益。
本文的创新点主要体现在以下几个方面:(1) 结合不规则图形的特点,提出一种适合处理不规则图形的排样优化算法,该算法可以更好地解决不规则图形排样问题;(2) 对现有算法进行改进与优化,解决排样过程中出现多余的缝隙、分割片数过多等问题,同时提高了排样效率;(3) 通过严格的实验验证,证明该算法能够在实际生产中得到广泛应用。
高频等参数感应测井的二维全参数反演方法研究
中 图分 类 号 :P 3 .4 6 1 8 文 献标 识 码 :A
是单 调增 大 的且搭 配 合 理 , 因而 根 据 5条 曲 线 的分
仪器的等参数条件分析
VI Z的发 射 线 圈 通 以频 率 为 -( KI 厂 角频 率 叫一
2i ) 电流 , 7 的 f 它在 电导 率为 、 电常数 为 e 磁导 率 介 、
离特 征还 可进 一 步直 观判 断该层 是 泥浆增 阻侵 入还 是减 阻 侵 入 或 是 否 为低 电 阻 率 环 带 。 由于 VI Z KI 有 2个纵 向分 辨 率 高 的高 频 短 源 距探 头 , 利 于直 有
第3卷 5
第 2期
测
井
技
术
Vo 5 No 2 L3 .
Ap 0 1 r 2 1
21 0 1年 4月
文 章 编 号 :0 41 3 ( 0 1 0—1 20 10 —3 8 NG TECHNoL_GY ( )
-_ _ _
互 层组 , 又可直 观 分 析较 厚 地 层 的 电阻 率 径 向变 化
频率、 源距 和接 收 间距 的单 发双 收线 圈 , 量 2个 接 测
基 金项 目: 岛科技 大学科研启动基金 和吉林 大学青年教师创新项 目资助 青 作者 简介 : 康俊佐 , ,9 3年生 , 士 , 男 17 博 副教授 , 从事 电磁波测井资料处 理与反演方法 的研究 。
优化理论——精选推荐

第一章最优化理论方法优化理论是一门实践性很强的学科。
所谓最优化问题,一般是指按照给定的标准在某些约束条件下选取最优的解集。
他被广泛地应用于生产管理、军事指挥和科学试验等领域,如工程设计中的最优设计、军事指挥中的最优火力配置问题等。
优化理论和方法于20世纪50年代形成基础理论。
在第二次世界大战期间,出于军事上的需要,提出并解决了大量的优化问题。
但作为一门新兴学科,则是在G.B.Dantzig提出求解线性规划问题的单纯形法,H.W.Kuhnh和A.W.Tucker 提出非线性规划基本定理,以及R.Bellman提出动态规划的最优化原理以后。
之后,由于计算机的发展,使优化理论得到了飞速的发展,至今已形成具有多分支的综合学科。
其主要分支有:线性规划、非线性规划、动态规划、图论与网络、对策论、决策论等。
1.极小值优化1.1标量最小值优化求解单变量最优化问题的方法有多种,根据目标函数是否需要求导,可以分为两类,即直接法和间接法。
直接法不需要对目标函数进行求导,而间接法则需要用到目标函数的导数。
常用的一维直接法主要有消去法和近似法两种。
消去法利用单峰函数具有的消去性质进行反复迭代,逐渐消去不包含极小点的区间,缩小搜索区间,直到搜索区间缩小到给定的允许精度为止。
该法的优点是算法简单,效率较高,稳定性好。
多项式近似法用于目标函数比较复杂的情况。
此时搜索一个与它近似的函数代替目标函数,并用近似函数的极小点作为原函数极小点的近似。
常用的近似函数为二次和三次多项式、间接法需要计算目标函数的导数,优点是计算速度很快。
常见的间接法包括牛顿切线法、对分法、割线法和三次差值多项式近似法等。
如果函数的导数容易求得,一般来说应首先考虑使用三次插值法,因为它具有较高的效率。
在只需要计算函数值得方法中,二次差值是一个很好的方法,它的收敛速度快,特别是在极小点所在区间较小时尤为如此。
1.2无约束最小值优化无约束最优化问题在实际应用中也比较常见,如工程中常见的参数反演问题。
二维装箱问题的非线性优化方法
二维装箱问题的非线性优化方法一、本文概述二维装箱问题(Two-Dimensional Bin Packing Problem,2DBPP)是一个重要的组合优化问题,它广泛应用于生产制造、物流配送、计算机科学等领域。
在二维装箱问题中,需要将一组不规则形状的物体装入到有限数量的固定大小的箱子中,以最小化所使用的箱子数量。
这个问题是一个NP难问题,因为它涉及到大量的组合选择和优化决策。
传统的二维装箱问题求解方法主要基于线性规划和启发式算法,这些方法在处理大规模问题时往往效率低下,难以得到最优解。
因此,本文提出了一种基于非线性优化方法的二维装箱问题求解策略。
这种方法通过对物体形状和装箱过程的非线性特征进行建模,可以更好地描述和解决问题。
本文首先介绍了二维装箱问题的背景和研究现状,然后详细阐述了非线性优化方法在二维装箱问题中的应用原理和步骤。
接着,通过具体的算例和实验验证,对比分析了非线性优化方法与传统方法的效果差异,并探讨了影响优化效果的关键因素。
本文总结了非线性优化方法在二维装箱问题中的优势和局限性,并对未来的研究方向进行了展望。
本文旨在为二维装箱问题的求解提供一种新的非线性优化思路和方法,为相关领域的研究和应用提供有益的参考和借鉴。
二、二维装箱问题的数学模型二维装箱问题(Two-Dimensional Bin Packing Problem, 2D-BPP)是一种典型的组合优化问题,它涉及到如何在满足一定约束条件下,将一组具有不同尺寸的物品有效地装入一系列固定大小的箱子中。
该问题的关键在于如何最大化每个箱子的空间利用率,同时确保所有物品都能被成功装箱。
在二维装箱问题中,每个物品通常由其宽度和高度两个尺寸参数来定义,而箱子则具有固定的宽度和高度。
目标是使用尽可能少的箱子来装下所有物品,同时满足每个箱子内物品的总宽度和总高度都不超过箱子的相应尺寸。
由于物品尺寸和箱子尺寸的多样性,以及物品在箱子中的排列方式的不确定性,使得二维装箱问题变得非常复杂。
Matlab优化算法以及应用案例分析
Matlab优化算法以及应用案例分析引言Matlab是一款功能强大的数学软件,以其丰富的功能和灵活的编程环境而受到广泛的应用。
在数学建模和优化问题中,Matlab优化算法是一个重要的工具。
本文将介绍Matlab优化算法的基本原理和常见应用案例分析。
一、Matlab优化算法的基本原理1.1 最优化问题的定义在开始介绍优化算法之前,我们首先需要了解什么是最优化问题。
最优化问题可以定义为在一定的约束条件下,找到使得目标函数达到最大或者最小的变量取值。
最优化问题可以分为无约束问题和约束问题两种。
1.2 Matlab优化工具箱Matlab提供了丰富的优化工具箱,其中包含了许多优化算法的实现。
这些算法包括无约束优化算法、约束优化算法、全局优化算法等。
这些工具箱提供了简单易用的函数接口和丰富的算法实现,方便用户在优化问题中使用。
1.3 优化算法的分类优化算法可以分为传统优化算法和启发式优化算法两类。
传统优化算法包括梯度下降法、牛顿法、共轭梯度法等,它们利用目标函数的一阶或二阶导数信息进行搜索。
而启发式优化算法则通过模拟生物进化、遗传算法、蚁群算法等方法来进行搜索。
二、Matlab优化算法的应用案例分析2.1 无约束优化问题无约束优化问题是指在没有约束条件的情况下,找到使得目标函数达到最小或最大值的变量取值。
在Matlab中,可以使用fminunc函数来求解无约束优化问题。
下面以一维函数的最小化问题为例进行分析。
首先,我们定义一个一维的目标函数,例如f(x) = 3x^2 - 4x + 2。
然后使用fminunc函数来求解该问题。
代码示例:```matlabfun = @(x)3*x^2 - 4*x + 2;x0 = 0; % 初始点[x, fval] = fminunc(fun, x0);```在上述代码中,fun是目标函数的定义,x0是初始点的取值。
fminunc函数将返回最优解x和目标函数的最小值fval。
高精度二维DCT的结构优化算法研究及FPGA实现

兀
一一一 一一 一一一 一一一 一一 一一一 一一一 一一… J
图2 2 D T结构 图 D— C
2 . 一维DC L I 2 T V S 架构
一
维 D T的算法 由式 ( ) C 2 和式 ( ) 3 可知 , 阵c偶数 矩
行 偶 对称 , 奇数行 奇对 称 , 通 过分离 偶数行 、 并 奇数 行[ 6 1
基 金 项 目 : 家 自然 科 学 基 金 项 目 (0 7 0 7 ; 部 产 学研 项 目(0 9 0 0 0 2 7 ; 国 6 9 2 3 )省 20 B 9 30 6 ) 深圳 大 学 创 新 团 队基 金 项 目 (0 1 3 ; 0 0 3 )深圳 市 基础 研 究 计 划 项 目( C 0 9 3 2 1 1 ; J 20 0 10 0 A)深圳 市 南 山 区科 技计 划 项 目 (0 9 4 l 2 0 0 5
预 矩 系 L后 阵 数.
预 矩 系 L后 阵 数
式 () 中 的 系 数 为 3
( , C D, , , = A B, , E F G)
J( o,专璐 c c c J c , c , ,孚, j 。 c o, o . ∞ , s 吣 sc 吣 o ’ s 百o s 。 s ∞ s s / 。
【 s at I ti a e,a 2 — C L I rh etr ae n 5 l e pp l e n hg- rcs n e t lpi s Abt c】 n hs p r D D T V S aci c e sd o -e l ie n ad ih pei o vco mut l r i r p t u b v i i r i e
维 D T列处理 的流水线结构代 替复用 一维 D T算 法以提高速度 , C C 并且在 一维 D T算法模块 中, C 对于 系数 乘法, 采用 并行乘法
二维装箱问题的算法
二维装箱问题(2D Bin Packing Problem)是一个经典的组合优化问题,它的目标是将一系列的矩形物品放入最小数量的容器中,同时满足每个容器的尺寸限制。
这个问题在实际应用中有很多场景,如物流、仓储、广告排版等。
解决二维装箱问题的算法有很多,以下是一些常见的算法:1. 贪心算法(Greedy Algorithm):贪心算法是一种简单且易于实现的算法。
它的基本思想是在每一步都选择当前最优的解决方案。
对于二维装箱问题,贪心算法可以选择每次放入面积最大的矩形,直到无法再放入为止。
然后开始新的一行,重复这个过程。
贪心算法的缺点是可能得不到最优解,因为它没有考虑到后续的放置情况。
2. 启发式算法(Heuristic Algorithm):启发式算法是一种基于经验的算法,它通过一定的规则来指导搜索过程。
对于二维装箱问题,启发式算法可以根据矩形的长宽比、面积等因素来确定放置的顺序和位置。
启发式算法通常能够得到较好的解,但不一定是最优解。
3. 遗传算法(Genetic Algorithm):遗传算法是一种模拟自然选择和遗传机制的全局搜索算法。
它通过不断地进行交叉、变异和选择操作,来生成新的解决方案。
对于二维装箱问题,遗传算法可以用于优化矩形的放置顺序和位置,以找到更优的解。
4. 模拟退火算法(Simulated Annealing):模拟退火算法是一种基于概率的全局优化算法。
它通过在一定的温度下随机搜索解空间,并在温度降低时逐渐收敛到最优解。
对于二维装箱问题,模拟退火算法可以用于优化矩形的放置顺序和位置,以找到更优的解。
5. 粒子群优化算法(Particle Swarm Optimization):粒子群优化算法是一种基于群体智能的全局优化算法。
它通过模拟鸟群觅食行为,来寻找最优解。
对于二维装箱问题,粒子群优化算法可以用于优化矩形的放置顺序和位置,以找到更优的解。
6. 线性规划(Linear Programming):线性规划是一种数学优化方法,它可以用于求解具有线性约束和目标函数的问题。
多维约束优化运动学模型问题举例
多维约束优化运动学模型问题举例一、引言1.问题背景及意义多维约束优化运动学模型在工程领域具有广泛的应用,如机器人路径规划、飞行器轨迹优化、电动汽车电池管理等。
这类问题旨在寻找满足多个约束条件的最优解,对于提高系统性能、降低能耗等方面具有重要意义。
2.研究现状近年来,国内外学者对多维约束优化运动学模型问题进行了广泛研究。
研究方法主要包括传统优化算法和现代优化算法。
在不同应用场景下,各种算法具有不同的性能表现。
二、多维约束优化运动学模型简介1.模型定义及特点多维约束优化运动学模型描述了多个变量在运动过程中的约束关系,具有以下特点:(1)非线性性强:模型中包含非线性函数和约束条件;(2)多变量:模型涉及多个变量,需要同时优化;(3)约束条件复杂:包括不等式约束、等式约束和几何约束等。
2.应用场景多维约束优化运动学模型应用于以下场景:(1)机器人路径规划:在给定环境中,寻找机器人无碰撞路径;(2)飞行器轨迹优化:在满足气动约束条件下,提高飞行器性能;(3)电动汽车电池管理:在保证电池安全的前提下,优化电池充放电过程。
三、问题举例1.实例一:机器人路径规划(1)问题描述:在二维环境中,寻找一条无碰撞的路径,使机器人从起点到终点;(2)模型建立:建立多维约束优化模型,包括机器人位姿、速度和加速度等变量;(3)求解方法:采用传统优化算法(如梯度下降法)与现代优化算法(如遗传算法)求解。
2.实例二:飞行器轨迹优化(1)问题描述:在满足气动约束条件下,优化飞行器轨迹,提高飞行性能;(2)模型建立:建立多维约束优化模型,包括飞行器位置、速度和加速度等变量;(3)求解方法:采用传统优化算法(如牛顿法)与现代优化算法(如粒子群优化算法)求解。
3.实例三:电动汽车电池管理(1)问题描述:在保证电池安全的前提下,优化电池充放电过程,提高续航里程;(2)模型建立:建立多维约束优化模型,包括电池状态、充放电功率等变量;(3)求解方法:采用传统优化算法(如内点法)与现代优化算法(如变分自编码器算法)求解。
分支定价方法求解带二维装箱约束的车辆路径问题
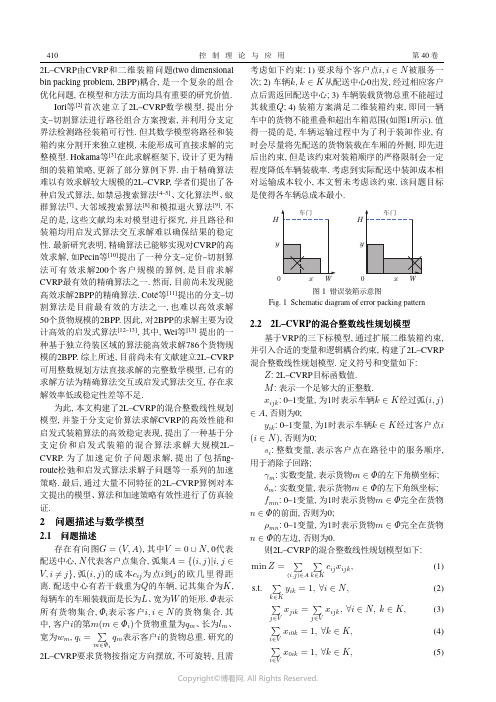
410控制理论与应用第40卷2L–CVRP由CVRP和二维装箱问题(two dimensional bin packing problem,2BPP)耦合,是一个复杂的组合优化问题,在模型和方法方面均具有重要的研究价值.Iori等[2]首次建立了2L–CVRP数学模型,提出分支–切割算法进行路径组合方案搜索,并利用分支定界法检测路径装箱可行性.但其数学模型将路径和装箱约束分割开来独立建模,未能形成可直接求解的完整模型.Hokama等[3]在此求解框架下,设计了更为精细的装箱策略,更新了部分算例下界.由于精确算法难以有效求解较大规模的2L–CVRP,学者们提出了各种启发式算法,如禁忌搜索算法[4–5]、文化算法[6]、蚁群算法[7]、大邻域搜索算法[8]和模拟退火算法[9].不足的是,这些文献均未对模型进行探究,并且路径和装箱均用启发式算法交互求解难以确保结果的稳定性.最新研究表明,精确算法已能够实现对CVRP的高效求解,如Pecin等[10]提出了一种分支–定价–切割算法可有效求解200个客户规模的算例,是目前求解CVRP最有效的精确算法之一.然而,目前尚未发现能高效求解2BPP的精确算法.Cot´e等[11]提出的分支–切割算法是目前最有效的方法之一,也难以高效求解50个货物规模的2BPP.因此,对2BPP的求解主要为设计高效的启发式算法[12–13],其中,Wei等[13]提出的一种基于独立待装区域的算法能高效求解786个货物规模的2BPP.综上所述,目前尚未有文献建立2L–CVRP 可用整数规划方法直接求解的完整数学模型,已有的求解方法为精确算法交互或启发式算法交互,存在求解效率低或稳定性差等不足.为此,本文构建了2L–CVRP的混合整数线性规划模型,并鉴于分支定价算法求解CVRP的高效性能和启发式装箱算法的高效稳定表现,提出了一种基于分支定价和启发式装箱的混合算法求解大规模2L–CVRP.为了加速定价子问题求解,提出了包括ng-route松弛和启发式算法求解子问题等一系列的加速策略.最后,通过大量不同特征的2L–CVRP算例对本文提出的模型、算法和加速策略有效性进行了仿真验证.2问题描述与数学模型2.1问题描述存在有向图G=(V,A),其中V=0∪N,0代表配送中心,N代表客户点集合,弧集A={(i,j)|i,j∈V,i=j},弧(i,j)的成本c ij为点i到j的欧几里得距离.配送中心有若干载重为Q的车辆,记其集合为K,每辆车的车厢装载面是长为L、宽为W的矩形.Φ表示所有货物集合,Φi表示客户i,i∈N的货物集合.其中,客户i的第m(m∈Φi)个货物重量为q m、长为l m、宽为w m,q i=∑m∈Φiq m表示客户i的货物总重.研究的2L–CVRP要求货物按指定方向摆放,不可旋转,且需考虑如下约束:1)要求每个客户点i,i∈N被服务一次;2)车辆k,k∈K从配送中心0出发,经过相应客户点后需返回配送中心;3)车辆装载货物总重不能超过其载重Q;4)装箱方案满足二维装箱约束,即同一辆车中的货物不能重叠和超出车箱范围(如图1所示).值得一提的是,车辆运输过程中为了利于装卸作业,有时会尽量将先配送的货物装载在车厢的外侧,即先进后出约束,但是该约束对装箱顺序的严格限制会一定程度降低车辆装载率.考虑到实际配送中装卸成本相对运输成本较小,本文暂未考虑该约束.该问题目标是使得各车辆总成本最小.))图1错误装箱示意图Fig.1Schematic diagram of error packing pattern2.22L–CVRP的混合整数线性规划模型基于VRP的三下标模型,通过扩展二维装箱约束,并引入合适的变量和逻辑耦合约束,构建了2L–CVRP 混合整数线性规划模型.定义符号和变量如下: Z:2L–CVRP目标函数值.M:表示一个足够大的正整数.x ijk:0–1变量,为1时表示车辆k∈K经过弧(i,j)∈A,否则为0;y ik:0–1变量,为1时表示车辆k∈K经过客户点i (i∈N),否则为0;s i:整数变量,表示客户点在路径中的服务顺序,用于消除子回路;γm:实数变量,表示货物m∈Φ的左下角横坐标;δm:实数变量,表示货物m∈Φ的左下角纵坐标;f mn:0–1变量,为1时表示货物m∈Φ完全在货物n∈Φ的前面,否则为0;ρmn:0–1变量,为1时表示货物m∈Φ完全在货物n∈Φ的左边,否则为0.则2L–CVRP的混合整数线性规划模型如下:min Z=∑(i,j)∈A∑k∈Kc ij x ijk,(1) s.t.∑k∈Ky ik=1,∀i∈N,(2)∑j∈Vx jik=∑j∈Vx ijk,∀i∈N,k∈K,(3)∑i∈Vx i0k=1,∀k∈K,(4)∑i∈Vx0ik=1,∀k∈K,(5)第3期季彬等:分支定价方法求解带二维装箱约束的车辆路径问题411∑i ∈Ny ik q iQ,∀k ∈K,(6)s i +1 s j +(1−x ijk )M,∀i,j ∈N,k ∈K,(7)∑i ∈Vx ijk =y jk ,∀j ∈N,k ∈K,(8)γm +w m W,∀m ∈Φ,(9)δm +l m H,∀m ∈Φ,(10)f mn +f nm +ρmn +ρnm y ik +y jk −1,∀m ∈Φi ,n ∈Φj ,i,j ∈N,m =n,k ∈K,(11)δn +l n δm +(1−f mn )M,∀m,n ∈Φ,(12)γm +w m γn +(1−ρmn )M,∀m,n ∈Φ,(13)s i ,γm ,δm 0,∀i ∈N,m ∈Φ,(14)x ijk ,y ik ,f mn ,ρmn ∈{0,1},∀i,j ∈V,k ∈K,m,n ∈Φ,m =n,(15)其中:目标函数(1)表示最小化车辆总成本;约束(2)确保每个客户点i 被一辆车服务一次;约束(3)为流平衡约束;约束(4)–(5)确保车辆从配送中心出发回到配送中心;约束(6)确保货物重量不超载;约束(7)确定路径中客户的先后顺序以消除子回路;约束(8)指弧(i,j )被使用,则必有车辆经过;约束(9)–(13)表示二维装箱约束,其中约束(9)–(10)表示货物装箱时不能超出车厢范围,约束(11)–(13)表示同一辆车中货物之间不能重叠;约束(14)–(15)表示变量的类型和取值范围.2.32L–CVRP 的集合划分模型2L–CVRP 混合整数线性规划模型含有三下标变量和大量约束,难以直接用于求解较大规模算例[14].文献[15]指出以列为变量,对整数规划模型进行Danzig-Wolfe 分解可得到基于集合划分的主问题和最短路径子问题.其中,集合划分模型能将大量变量隐式地处理,有效减小约束规模并提供更紧的线性松弛边界.由于列生成算法[16]无需枚举所有列可求得问题下界,结合分支定界算法可实现较大规模问题的高效求解.为此,以下给出2L–CVRP 集合划分模型.以可行路径为列,定义Ω为所有列集合;c r =∑i ∈V ∑j ∈Vc ij x ijr 为路径r ∈Ω的成本;a ir 为常量,当r 经过客户点i 时定义a ir =1,否则为0;λr 为整数变量,指r 使用的次数.则2L–CVRP 的集合划分模型为min Z =∑r ∈Ωc r λr ,(16)s.t.∑r ∈Ωa ir λr =1,∀i ∈N,(17)∑r ∈Ωλr |K |,(18)λr ∈Z +,∀r ∈Ω,(19)其中:目标函数(16)表示最小化车辆总成本;约束(17)表示每个客户点被服务一次;约束(18)表示路径数不超过车辆数;约束(19)指变量取值范围.该模型中,由于Ω包含的路径数量庞大,对大规模问题直接枚举所有列的方式不可行.为此,在每个分支节点中,可先枚举部分列构造一个规模较小的主问题模型,然后将λr 线性松弛,通过迭代不断地向松弛主问题添加机会成本为负(¯c r <0)的有效列,直到没有新的列添加为止,得到的解为主问题的一个下界.为松弛主问题迭代地添加有效列是通过对偶定理构造的子问题实现,这个过程即为列生成算法.设πi (i ∈N ),π0分别对应约束(17)–(18)的对偶变量,则路径r 的机会成本为¯c r =c r−∑i ∈Va ir πi ,∀r ∈Ω.(20)子问题转化为求解¯c r 最小的可行路径,即含有资源约束和二维装箱约束最短路径问题(elementary shortest path problem with resource constraints and two dimensional loading constraint,2L–ESPPRC).当最短路径的¯c r <0时,将其加入松弛主问题,不断迭代求解直到不存在¯c r <0的路径.令SZ 为子问题目标函数值,e ij 为1时表示弧(i,j )被使用,否则为0.则子问题数学模型为min SZ =∑i ∈V ∑j ∈V(c ij −πi )e ij ,(21)s.t.∑j ∈Ve ij 1,∀i ∈N,(22)∑j ∈Ve ji =∑j ∈Ve ij ,∀i ∈N,(23)∑i ∈Ne i 0=1,(24)∑i ∈Ne 0i =1,(25)∑i ∈V ∑j ∈Vq i e ij Q,(26)s i <s j +(1−e ij )M,∀i ∈N,∀j ∈N,(27)f mn +f nm +ρmn +ρnm e ij ,∀m ∈Φi ,n ∈Φj ,i,j ∈N,m =n,(28)约束式(9)–(10)(12)–(15).其中:目标函数(21)表示最小化路径机会成本;约束(22)表示每个客户点至多被服务一次;约束(23)为流平衡约束;约束(24)–(25)表示车辆从配送中心出发需回到配送中心;约束(26)表示货物重量不能超载;约束(27)确定路径中客户的先后顺序以消除子回路;约束(28)表示被装载货物间存在平面位置关系;该模型412控制理论与应用第40卷应同时满足二维装箱约束(9)–(10)和(12)–(13)以及变量的类型和取值范围约束(14)–(15).3基于分支定价的方法求解2L–CVRP 分支定价算法最早被Sesrosiers等[17]用于求解VRP,其本质是将列生成方法与分支定界方法相结合.针对本文研究的2L–CVRP,对分支定界的每个节点,首先从包含部分列的松弛主问题中获取对偶变量值,然后利用标签算法求解子问题以获取¯c r<0的列,再将其中满足装箱约束的列加入主问题.基于列生成算法反复执行上述操作直到无法获得¯c r<0的列,则松弛主问题当前解为节点的下界.若该下界不是最优整数解,则进行分支定界操作,选择下界最小的节点继续求解,直到求得最优整数解.其主要求解流程如图2所示.图2分支定价方法求解2L–CVRP流程图Fig.2Flow chart of branch-and-price approach forsolving2L–CVRP3.1定价子问题求解2L–ESPPRC是带资源约束的最短路径问题(ele-mentary shortest path problem with resource con-straints,ESPPRC)的拓展,亦为NP–难问题.对于此类问题的求解,一般采用动态规划的思想[18].本文根据子问题路径需满足二维装箱约束的特征,提出了一种基于ng-route松弛策略的标签算法和基于禁忌搜索的装箱算法进行求解.其主要求解思路如下:步骤1生成初始标签存入标签集合(见3.1.1).步骤2遍历标签集合.若有可探索标签,则按照标签生成规则(见3.1.1和3.1.2)生成新标签;否则,转步骤4.步骤3基于标签支配规则(见3.1.2),判断新标签与其他标签的关系,删除被支配标签,并更新标签集合,转步骤2.步骤4基于装箱算法检测标签集合中机会成本为负(见3.1.3)的标签对应的路径(列)可行性,将其中的可行路径加入松弛主问题.3.1.1标签算法设由起点到客户点i对应的路径R=(0,···,i), i∈N由标签L(R)=(¯c(R),i(R),Π(R),q(R),Area(R), r(R))表示,其中¯c(L)为路径机会成本,i(R)为路径当前抵达点,Π(R)为当前限制抵达点的集合,q(R)为路径上货物重量,Area(R)为路径上货物总面积,r(R)为路径客户点顺序.配送中心作为初始标签L0=(0, 0,∅,0,0,∅).令Area(Φj)表示客户点j的货物总面积,标签L(R)对弧(i,j)探索时,若同时满足i(R)=i, q(R)+q j Q和Area(R)+Area(Φj) L×W,则新标签生成规则如下:¯c(R′)=¯c(R)+c ij−πi,(29)i(R′)=j,(30)Π(R′)=Π(R)←j,(31)q(R′)=q(R)+q j,(32)Area(R′)=Area(R)+Area(Φj),(33)r(R′)=r(R)←j.(34)反之,若违背车辆载重约束或车厢面积约束则表明车辆不能继续装下客户i的所有货物,因而无需生成新标签.其中,关于面积的约束条件能更严格约束标签产生数量,从而提高算法效率.此外,通过支配规则来判断和删除劣势标签能有效加速求解进程.标签L′支配标签L当且仅当同时满足如下条件:¯c(R′) ¯c(R),(35)i(R′)=i(R),(36)Π(R′)⊆Π(R),(37)q(R′) q(R).(38)即标签L′的机会成本优于标签L,且能探索标签L 的所有后续路径,该支配规则可以确保满足二维装箱约束的最短路径被保留.例证如下:设标签L对应的路径为R=(0,1,2,3)满足二维装箱约束,若标签L′支配标签L,则对应的路径R′∈{(0,3),(0,1,3),(0,2, 3)}也一定满足.即路径可行的标签才能支配另一个可行的标签.在此规则下,满足二维装箱约束的最短第3期季彬等:分支定价方法求解带二维装箱约束的车辆路径问题413路径一旦产生将不会被支配.然而,得到的¯c r <0的路径并不一定满足二维装箱约束,因此,在添加到主问题之前还需进行二维装箱可行性的判定,即检测是否满足约束(9)–(10)和(12)–(15).3.1.2基于ng-route 松弛策略的标签算法随着客户点规模增大,标签量会成倍增加,上述算法难以在有效时间内遍历和探索所有标签.ng-route 松弛策略由Baldacci 等[19]提出,一方面允许客户点在一定条件下被服务多次,另一方面强化支配规则,使得大规模的CVRP 子问题能在较短时间内求解.本文借鉴该思路,引入ng-route 松弛策略求解2L–CVRP 子问题.本文对ng-route 松弛作如下定义:设NG i 为客户点i 的邻域集,即距离该点最近的ζ个客户点集合,τ为标签L ′标记路径R ′中客户点的序号,t 为路径R ′中客户点总数,则生成新标签规则中式(31)由式(39)代替.Π(L ′)={j }∪{i τ:i τ∈t ∩s =τ+1NG i s ,τ=1,···,t −1},(39)其中:j 指标签L ′对应的路径R ′中当前抵达的客户点,{i τ:i τ∈t ∩s =τ+1NG i s ,τ=1,···,t −1}是指特定的客户点集合,这些点存在于其后的所有客户点邻域集中.例如,设标签L 对应的路径R =(0,1,2,3),NG 1={4,5,2},NG 2={1,4,3},NG 3={1,6,5}.由于客户点1存在于邻域集NG 2和NG 3中,而客户点2不在邻域集NG 3中,则Π(L )={1,3}.邻域规模ζ的大小影响子问题求解效率,当NG i 的规模设为0时,子问题即为最短路径问题(shortest path problem with re-source constraints,SPPRC)[20];反之,当NG i 的规模设为客户总规模时,子问题即为ESPPRC.此外,在支配规则中,基于ng-route 松弛策略的标签算法用式(40)替换式(38),从而减少支配判断次数.q (R ′)=q (R ).(40)值得注意的是,在ng-route 松弛策略中,装箱不可行路径对应的标签可能支配可行的标签.例如,设标签L 的路径R =(0,1,2,3)装箱可行,标签L ′的路径R ′=(0,1,4,3)装箱不可行,NG 1={4,5,2},NG 2={1,4,3},NG 3={1,6,5},NG 4={2,3,5}.当¯c (R ′) ¯c (R )且q (R ′)=q (R )时,标签L ′会支配L .即在ng-route 松弛策略下,装箱可行的最短路径可能被支配.但算法每次迭代时,松弛主问题对应的对偶变量值不断更新,同一路经对应的机会成本¯c (R )将发生变化,路径之间的支配关系也将不断改变,因而在一次迭代中可行路径对应的标签被不可行路径对应标签支配的关系并不会阻止算法在整个迭代过程中找到最短的可行路径.3.1.3二维装箱可行性检测分支定价算法中需要频繁调用装箱算法,为保证求解效率,本文结合文献中的Skyline [8]和Random-LS [9]两种方法提出基于禁忌搜索的装箱算法.具体而言,首先调用改进的Skyline 装箱算法进行求解,若不能获得可行的装箱方案,则调用基于禁忌的独立待装区域装箱算法求解,若依然无法获得可行的装箱方案,则判定路径不可行.1)改进的Skyline 装箱算法.Skyline 算法中装箱图案由一条Skyline 分割的已装载区和未装载区组成.其中,Skyline 由装箱图案最高边缘连接而成,其多个凹点处对应不同装箱点(图3(a)中加粗虚线为Skyline,加粗点为装箱点).该算法将货物装入不同装箱点后,计算浪费空间的个数,并将其作为适应值,其中,浪费空间指无法容纳待装货物的未装载矩形区域(如图3(b)中阴影部分).该算法将货物按照一定顺序装入某装箱点(如图3(b)所示),确保不违反装箱约束且适应值最优,重复更新Skyline 和装箱点以继续装载.若算法不能装入所有货物,则随机交换两货物装箱顺序,并将它们存入禁忌表,在一定周期内不再重复交换.(a) Skyline 和装箱点(b) 货物装箱示例0Y8)ZY 8图3Skyline 算法装箱示意图Fig.3Schematic diagram of Skyline packing algorithm由于浪费空间的总面积同样会对装箱效果产生一定影响,本文通过综合考虑货物装入后造成的浪费空间个数和总面积,改进了算法的最优适应值计算方法.具体而言,改进的Skyline 算法首先计算货物装入装箱点后产生的浪费空间个数,优先选择个数最少的装箱点,若有多个这样的位置,则计算浪费空间总面积并优先选择总面积最小的装箱点装入.改进的Skyline 算法能有效利用车厢面积,从而提高车辆装载率.2)基于禁忌的独立待装区域装箱算法.RandomLS 算法中,装箱图案由已装载区(图4(a)中阴影部分)和未装载区(图4(a)中空白部分)组成.未装载区可沿其边界线分割为多个矩形,其中,存在一条边与车门重叠的矩形称为待装区域.若某待装区域包含在另一待装区域内,则认为该待装区域被支配,需删除.所有未被支配的待装区域称为独立待装区域,以下简称SP,如图4(a)中SP 1,SP 2和SP 3所示.Random414控制理论与应用第40卷LS 算法将货物按照一定顺序装入某SP 左下角位置,使得不违反装箱约束且装入后车厢中的SP 数量最小.如图4(b)所示,货物装入SP 1后共产生3个SP.若不能装下所有货物,RandomLS 算法随机交换两货物装箱顺序以重新求解.然而,随机交换容易产生重复的装箱顺序影响算法求解性能.(a) SP(b) 货物装箱示例0Y 8)Z0Z)图4基于禁忌的独立待装区域装箱算法装箱示意图Fig.4Schematic diagram of tabu-based SP packing algorithm为克服上述不足,本文在交换货物装箱顺序时引入禁忌策略.改进后的基于禁忌的独立待装区域装箱算法首先按照货物长、宽和面积对货物综合排序,使得长宽比最大的货物优先装入,若长宽比相同则选择面积大的货物优先装入.若不能装下所有货物则随机交换两货物顺序,并将它们存入禁忌表中.改进后的装箱算法通过加入禁忌表能有效避免货物重复交换顺序,从而提高算法效率.3.1.4定价子问题求解流程设F (i,q )为储存i (L )=i 且q (L )=q 的标签集合,则定价子问题求解算法的具体流程如算法1所示.通过改变当前路径限制抵达客户点集合Π(R )的生成规则和标签支配规则,即可在算法1中取消ng-route 松弛策略.当去除第7行的标签生成规则(式(33))和第22行对路径二维装箱可行性的判定时,算法1可直接用于求解SPPRC.3.2分支策略若得到的松弛主问题的解为非整数解,则需在分支定界树上执行分支策略搜寻整数解.本文借鉴常用的分支策略,即路径数分支[21]和弧分支[17]对非整数解节点进行分支操作.路径数分支指主问题中∑r ∈Ωλr不为整数时,通过限制∑r ∈Ωλr [∑r ∈Ωλr ]和∑r ∈Ωλr [∑r ∈Ωλr ]+1进行分支.弧分支指存在λr (r ∈Ω)不为整数时,选择|∑r ∈Ω(i,j )r −0.5|最小的弧(i,j )进行分支,对支节点分别限制(i,j )=1和(i,j )=0,前者表示经过点i 后必须到点j ,后者表示经过点i 后不能到点j .本文结合两种分支策略,采用组合分支的方法,首先选择下界最小的节点优先分支,若∑r ∈Ωλr 不为整数则选择路径数分支;否则,若∑r ∈Ω(i,j )r 不为整数,选择弧分支.算法1定价子问题求解流程伪代码输入:π输出:Ω1:F (0,0)←(0,0,∅,0,0,∅)2:for q =0to Q do 3:for all (i,j )=0do 4:for all L 1=(¯c 1,i 1,Π1,q,Area(R ),r 1)do 5:if j /∈Π1then 6:¯c 2=¯c 1+c ij −πi ,insert =true 7:L 2←(¯c 2,j,Π1∩NG j ∪{j },q +q j ,Area (R ′)=Area (R )+Area (Φj ),r 1∪j )8:for all L ∈F do 9:if L 2dominates L then delete L 10:else if L dominates L 2then 11:insert =false break 12:end if 13:if insert =true then F (j,q +q j )←L 214:end if 15:end for 16:end if 17:end for 18:end for 19:end for20:for all L ∈F (i,q )do ¯c (L )′=¯c (L )+¯c i 021:if ¯c (L )′<0then 22:if r (L )is an element and two dimensional feasibleroute then Ω←r (L )23:end if 24:end if 25:end for3.3加速策略3.3.1启发式算法求解子问题在根节点中,求解子问题时满足¯c r <0的列通常很多,算法每次迭代生成大量标签,需耗费大量时间进行遍历.研究表明,使用启发式方法求解子问题能获取大部分¯c r <0的列,有效减少后续标签算法搜索时间[22].因此,本文提出两阶段启发式算法对子问题进行预求解,第1阶段采用节约算法,第2阶段采用松弛的标签算法.使用节约算法时,每次将距离当前客户点机会成本最小的点加入路径,直到违反装箱或载重约束.使用松弛的标签算法时,以式(35)–(36)(40)为支配规则,即每个标签集合F (i,q )中只储存机会成本最小的标签.若启发式算法无法求得机会成本为负的列则再调用第3.1节标签算法.3.3.2装箱可行路径存储子问题需反复迭代求解,是影响算法性能的关键,第3期季彬等:分支定价方法求解带二维装箱约束的车辆路径问题415尤其加入二维装箱约束后,每次检测路径可行性会耗费大量时间.因此,本文采用路径存储机制通过储存二维装箱可行的路径,以避免对其子路径的检测.前期节约算法生成的路径中车辆基本接近满载状态,即一条路径中包含多个客户点,将这些路径储存能有效减少后续大量子路径的装箱可行性判定.3.3.3路径枚举将¯c r<0的列加入主问题中可改善下界,但这些列不一定包含最优整数解的所有路径.Baldacci等[23]指出将¯c r<Z−DRZ的列加入主问题能改善上界从而加快求得最优整数解,其中Z指当前最优整数解目标值,DRZ指松弛主问题对偶问题目标值.考虑到CPLEX的求解性能,只对已有列数不超过一定数量的节点获取¯c r<Z−DRZ的列加入主问题.使用该策略获得较好上界,可剪去大量下界劣于上界的支节点以加快算法求解.4数值测试与分析本文的算法在visual studio2019c++上编程实现,其中混合整数线性规划模型求解和集合划分模型松弛主问题求解均调用ILOG CPLEX12.9.整个测试过程运行在Windows10系统,配置为Intel(R)Core(TM) i5-8500*******GHz,内存为8GB的PC机上.4.1测试算例Gendreau等[4]基于经典CVRP算例的客户信息,根据5种规则生成客户货物数量以及每个货物的长宽,得到了大量2L–CVRP测试算例.其中,规则1下客户货物数量和长宽都为1,即CVRP;规则2–5针对每个客户i随机生成|Φi|个货物,对每个货物m∈Φi通过在表1中的3种不同分布规则下随机生成货物的长和宽,由此生成5类算例,其中,客户数在15∼255之间,客户间距离为欧式距离,车厢的L和W分别为40和20.考虑到Cplex求解问题规模和计算机内存限制,本文从中选取了75个客户规模为15∼50之间的算例进行测试.4.22L–CVRP求解结果与分析测试中,CPLEX求解时长和算法总求解时长均设置为2h,ng-route的邻域规模ζ设为8.本文首先验证了提出的混合整数线性规划模型求解小规模2L–CVRP的有效性.然后,测试了基于分支定价的方法求解不同特征2L–CVRP的结果.为了进一步分析算法性能,将求解结果与文献[9]中启发式方法求得的已知最优解进行了对比.同时,分析了基于ng-route松弛策略的标签算法求解子问题的优势.测试结果如表2所示,其中“−”表示在2小时内未获得整数解.4.2.1与精确算法结果对比分析表2中加粗数据表示CPLEX求得相应算例最优解,验证了2L–CVRP混合整数线性规划模型的有效性.但2h内只有17个小规模算例被求得最优解,该方法无法求解较大规模算例.分析Iori等[2]使用精确算法求解考虑先进后出约束问题的结果发现,0304,0305,0505等13个算例的下界劣于文献[9]已知最优解,说明该精确算法由于对装箱求解时间的限制导致其不能确保解的最优性.CVRP算例(尾号为1)包含15至50个客户规模,由表2可知,CPLEX能在2h内求得了客户规模为25的算例的最优解,然而对于50个客户规模的算例,上下界相差30.76%.相比而言,基于分支定价的算法能求得除算例1901外其他所有算例的最优解,其平均求解时间为793s,其中大部分算例求解时间仅需几分钟,说明算法求解效率高.4.2.2与启发式算法结果对比分析如表2,使用标签算法求解子问题时,算法在有效时间内求解了50个算例,其中46个结果为已知最优解,其他结果与对应的已知最优解相差小于0.83%.使用ng-route松弛求解子问题时,算法在有效时间内求得了75个算例的上界,其中64个为已知最优解,其他与已知最优解相差小于2.23%.算例1901∼1905的客户规模较大,即使不带装箱约束也难以通过精确算法求解[23],而本文算法在2h内求得结果与已知最优解平均只相差1.43%.由此可知,基于分支定价的方法求解2L–CVRP时,使用标签算法或基于ng-route松弛的标签算法求解子问题,均能得到较好的效果.同时,对比结果验证了本文基于分支定价和启发式装箱算法求解2L–CVRP的有效性.表1测试算例产生规则Table1Rules for generating the benchmark instances规则|Φi|垂直同质水平l m w m l m w m l m w m2[1,2][0.4L,0.9L][0.1W,0.2W][0.2L,0.5L][0.2W,0.5W][0.1L,0.2L][0.4W,0.9W] 3[1,3][0.3L,0.8L][0.1W,0.2W][0.2L,0.5L][0.2W,0.4W][0.1L,0.2L][0.3W,0.8W] 4[1,4][0.2L,0.7L][0.1W,0.2W][0.1L,0.4L][0.1W,0.4W][0.1L,0.2L][0.2W,0.7W] 5[1,5][0.1L,0.6L][0.1W,0.2W][0.1L,0.3L][0.1W,0.3W][0.1L,0.2L][0.1W,0.6W]416控制理论与应用第40卷表22L–CVRP测试算例结果对比Table2Comparison results of2L–CVRP benchmark instances算例编号客户数已知最好解分支定价算法结合启发式装箱算法CPLEX Iori等[2]标签算法求解子问题基于ng-route松弛策略的标签算法求解子问题上界下界上界求解时间/s与已知最好解对比/%上界求解时间/s与已知最好解对比/%010115278.73278.726273278.72670278.726300 010215278.73278.726285278.7261230278.7261040 010315284.52327.178280284.519510284.5191140 010415282.59294.250288282.946320282.946610 010515278.73286.347279278.72660278.726220 020115334.96334.964329334.964210334.964130 020215334.96334.964342334.964430334.964320 020315352.16352.159347352.159180352.159250 020415334.96334.964336334.964310334.964170 020515334.96334.964329334.964180334.964120 030120358.40358.402351358.402140358.402260 030220387.70393.539396387.7041530387.70411400 030320394.72427.930387394.7219190394.7211040 030420362.41368.563374362.414540362.4141380 030520358.40376.958369358.402300358.402490 040120430.88430.885423430.88520430.88510 040220430.88430.885434430.885210430.885240 040320430.88451.494432430.885520430.885110 040420447.37459.008438447.373490447.3732800 040520430.88435.933423430.885230430.88550 050121375.28375.280367375.280810375.28050 050221375.28375.280380375.280730375.280430 050321381.69460.911373381.690660381.690470 050421383.87392.885377383.875820383.875480 050521375.28387.543389375.280760375.280230 060121495.85495.848488495.8481270495.848540 060221495.85498.157491495.848970495.848820 060321497.17510.773496498.15712010.2498.1576480.2 060421498.32565.463489498.316780498.316930 060521495.75508.559488495.8481270.02495.848320.02 070122568.56568.563558———568.56320850 070222725.46773.724724———725.45972000 070322678.75825.577698———678.74810790 070422700.721185.08714———700.71642810 070522657.77888.01742———657.76934480 080122568.56568.563657———568.5635130 080222674.55760.581720———685.0627200 1.53 080322738.43881.539730———740.84872000.33 080422692.471141.32701———692.47432780 080522609.90815.163721———609.90017730 090125607.65607.651609607.651120607.65120 090225607.65607.651612607.651430607.651320 090325607.65670.019615607.651370607.651680 090425621.23667.073626625.0963630.62625.096850.62(接下一页)第3期季彬等:分支定价方法求解带二维装箱约束的车辆路径问题417(接上一页)算例编号客户数已知最好解分支定价算法结合启发式装箱算法CPLEX Iori等[2]标签算法求解子问题基于ng-route松弛策略的标签算法求解子问题上界下界上界求解时间/s与已知最好解对比/%上界求解时间/s与已知最好解对比/%090525607.65—609607.651830607.651500 120130610.00637.950—610.0031730610.003660 120230610.57——610.5703430610.5701210 120330610.00——610.0031160610.003720 120430614.23——614.2351620614.2354080 120530610.00——610.00390610.003270 160135698.61754.344682698.60590698.6051530 160235698.61—682698.605350698.6052460 160335698.61—682698.605100698.6051400 160435703.35—691703.3537380703.3538430 160535698.61—682698.605140698.605550 170140861.791109.06—861.7871940861.7871610 170240863.66——870.8562190.83870.8561020.83 170340861.79——861.7871870861.7872520 170440861.79——861.7871840861.787710 170540861.79——861.7871620861.787520 190150524.61757.653————525.90272000.25 190250754.53—————759.94272000.71 190350771.66—————788.1167200 2.09 190450775.87—————793.5277200 2.23 190550644.59—————656.9417200 1.884.2.3ng-route松弛策略性能分析表2中,对于有无ng-route松弛策略均能求解的50个算例,使用ng-route松弛策略平均求解时间减少了9.58s.在2L–ESPPRC中,虽然ng-route松弛后的支配规则不能保证解的最优性,但通过反复迭代能有效消除支配规则的负面影响,使得其解趋近或达到最优解.另外,使用ng-route松弛策略相比传统的标签算法可多求解15个算例.分析算例特征发现,0701∼0705, 0801∼0805这10个算例均是车辆容量与客户最小需求量比值较大(相差75倍),即在最优解的路径方案中一条路径可以服务较多客户的场景.尤其对于算例1901∼1905,客户规模为50个,且车辆容量与客户最小需求量比值达到53.33.在这种场景下,客户点规模增大、车辆可以容纳更多客户均会造成路径规模成倍增加,直接使用标签算法求解子问题,则需要耗费大量时间进行遍历.而ng-route松弛策略一方面允许客户点在一定条件下被服务多次,另一方面强化了支配规则,能有效减少标签数量,更为高效地求解2L–CVRP子问题.另外,从结果发现,算例0605(已知最优解为495.75,由Leung等[24]提供)具有二维装箱约束限制,其结果不可能优于不具装箱约束限制的算例0601(最优解为495.85),由此可知Leung等[24]通过启发式算法求得的已知最优解存在谬误.5结论本文研究了带二维装箱约束的车辆路径问题,分别建立了其混合整数线性规划和集合划分模型,通过CPLEX求解小规模算例验证了混合整数线性规划模型的有效性.同时,基于集合划分模型设计了基于分支定价的方法进行求解.针对子问题提出了基于ng-route松弛策略的标签算法和基于禁忌搜索的二维装箱算法.此外,提出了启发式算法预求解、装箱可行路径存储和路径枚举融合的加速策略.仿真结果表明,提出的基于分支定价的方法能高效求解较大规模2L–CVRP.另外,分析算例特征和ng-route松弛策略对算法求解性能的影响表明,该松弛策略能有效提升算法求解效率、实现对较大规模2L–CVRP的求解.下一步研究方向将分为改进算法以求解更加复杂的约束(如可旋转和先进后出等)和设计高效的精确装箱算法以求解更大规模的2L–CVRP最优整数解.。
焊接机器人路径规划与优化算法研究
焊接机器人路径规划与优化算法研究近年来,随着自动化、人工智能技术的迅猛发展,焊接机器人成为了现代工业制造中不可或缺的设备之一。
而焊接机器人路径规划与优化算法的研究,则是焊接机器人工作效率与质量的重要保障。
一、焊接机器人路径规划的基础焊接机器人路径规划的基础是焊接工艺,其主要是根据焊接工艺参数,确定焊缝位置及尺寸,使得焊接质量优良且工作效率高。
而焊缝的设计则是焊接机器人路径规划的起始点。
一般来说,焊接机器人路径规划分为二维路径规划和三维路径规划。
二维路径规划主要是指平面内的路径规划,而三维路径规划则是指空间内的路径规划,其难度和复杂度远高于二维路径规划。
在焊接机器人路径规划中,常用的算法包括最短路径算法、A*算法、Dijkstra 算法等。
其中最短路径算法是一种基本的寻路算法,它以边为基础而不是点,从一个点到另一个点的最短路径通常会存在多种方案,而最短路径算法正是可以帮助我们找到这些最短路径。
A*算法则是一种较常用的启发式算法,它通过一个估价函数来评估每个节点的优先级,从而得出最优路径。
而Dijkstra算法则是一种贪心算法,它通过一步一步往前推进,找到每一个节点到起点的最短路径。
二、焊接机器人路径规划中的优化算法除了基础的路径规划算法外,研究焊接机器人路径规划的优化算法也是非常重要的。
因为焊接机器人在执行任务时,往往需要在多个考虑因素的情况下进行路径规划。
例如,在任务完成时间内完成最大数量的焊接任务,同时避免工作安全问题和电力浪费等。
在这些相互联系的问题中寻找平衡点是非常重要的。
常用的优化算法包括模拟退火算法、遗传算法、粒子群算法等。
模拟退火算法是基于物理上的传热思想而发展起来的优化算法,它的基本思想是将一个系统的状态随机地演化一段时间,经过一定的温度序列降温,系统最终达到一个热力学平衡态。
而在求解路径规划问题时,可以将每个状态看作路径节点的不同排列阶段。
随机的状态转移将使得路径节点排列阶段达到更广的范围,从而使优化效果得到大大提高。
优化问题的经典解法

第4章优化问题的经典解法Chapter 4 Classical Optimization 4-1 优化问题的最优解(Optimum solution)4-1-1 无约束最优解、约束最优解所谓优化问题的最优解→变量的最优点{}Tnxxx**2*1,, + 函数的最优值()*X f(Optimum point + Optimum value)。
根据优化问题是否存在约束,有无约束最优解及有约束最优解之分。
1)无约束最优解使函数取得最小Minima(最大Maxima)值的解称之,见图4-1。
图4-12)约束最优解使函数取得最小(最大)值的可行解称之。
情况要比无约束问题复杂,见二维问题的示意图4-2。
约束不起作用一个起作用约束二个起作用约束线性规划问题图4-24-1-2 局部最优解解和全局最优解 (Relative or local & Absolute or global minimum )以一维问题为例,对于无约束优化问题,当目标函数不是单峰函数时,会出现多个极值点 ,,,*3*2*1x x x ,对应的函数值为 ),(),(),(*3*2*1x f x f x f 。
每一个极值点在数学上称为局部最优点,它们中间的最小者才是全局最优点。
对于约束优化问题,情况就要更复杂一些,目标函数、约束函数的特性都会使得可行域内出现二个以上的局部极小点,其中函数值最小者,称为全局最优点。
P16 Fig3.2 , P30 图2-10清华本课程中讲述的所有优化方法目前只能求出局部最优解,而优化设计的目的是要追求全局最优解。
因此,除了凸规划问题以外,要进行局部最优解之间的比较,选择出问题的全局最优解来。
P124-2 凸集、凸函数与凸规划4-2-1 凸集 (Convex set )函数的凸集表现为其单峰性(Unimodal )。
对于具有凸性的函数而言,其极值点只有一个,该点即是局部极值点,也是全局最优点。
为了研究函数的凸性,首先引入凸集的概念。
需求可拆分车辆路径优化模型与BLF-GA算法设计
需求可拆分车辆路径优化模型与BLF-GA算法设计彭勇;罗佳【摘要】生活中,零售商或者顾客需求通常由具有一定尺寸的多件货物构成,这就使得车辆配送不仅应考虑车辆载货重量的限制,还应考虑车辆载货容积的限制.而多件货物构成的需求在很多情况下是允许多台车辆配送来满足,即需求可拆分.基于以上现实情况,笔者建立了考虑二维装箱约束的需求可拆分车辆路径优化模型,给出了模型解的特征.以改进的遗传算法为基础,结合BLF算法,设计了BLF-GA算法.数值案例表明:不考虑装箱约束得到的最优路线存在不满足装箱约束的情况,考虑装箱约束得到的最优值大于不考虑装箱约束的最优值,这说明货物尺寸对车辆路径产生了影响,在车辆路径优化中考虑装箱约束.【期刊名称】《广西民族大学学报(自然科学版)》【年(卷),期】2017(023)002【总页数】7页(P67-73)【关键词】2L-SDVRP模型;装箱约束;BLF-GA算法【作者】彭勇;罗佳【作者单位】重庆交通大学交通运输学院,重庆 400074;宜宾学院经济与管理学院,四川宜宾 644000【正文语种】中文【中图分类】U492.3+1车辆路线安排问题最早由Danting和Ramser[1]在1959年提出,此后车辆路径问题得到了越来越多的关注,带时间窗、多种车型、多个配送中心等车辆路径问题被提出.彭勇等人[2-3]在研究车辆路径问题时,考虑车速会因为时间、路段不同而变化后,运用粒子群算法、Dijkstra-GA算法优化路径.1989年Dror&Trudeau首次提出了需求可拆分车辆路径问题(Split Delivery Vehicle Routing Problem, SDVRP)的概念,[4]并提出SDVRP是在标准车辆路径问题上对“每个客户点的需求只能由一辆车进行配送”这一约束条件的松弛,在标准车辆路径问题的基础上进行扩展,允许每个客户点的需求被两辆及以上的车辆进行配送,这一松弛约束可以减少配送车辆以及行驶总路径长度.至今为止,针对需求可拆分车辆路径问题已有大量的研究方法.研究学者们开始对SDVRP进行扩充,即在VRP问题中不仅考虑客户需求能由两辆及以上的车辆同时进行配送这一松弛约束,还考虑了其他约束条件,如Frizzell和Giffin[5-6]在SDVRP中还考虑了时间限制.Lee、Marina等人[7]在SDVRP中考虑车场不是单一的,即多车场的需求可拆分车辆路径问题.彭勇等人[8]在团队定向问题中考虑二维装箱约束条件,提出了改进的BLF算法.但在客户需求可进行拆分配送的问题中并没有学者考虑过装箱约束,需求可拆分车辆路径问题求得的目标值虽然低于车辆路径问题,但是其得到的最优路线未考虑被装货物尺寸与车厢尺寸之间的关系,往往会出现分配给一辆车的配送任务由于无法装箱而重新分配,出现重复装卸货物的现象,不仅会增加装卸成本,还降低了配送中心的服务水平.因此,对带二维装箱约束[9]的SDVRP问题进行研究显得非常重要.由于考虑二维装箱约束的需求可拆分车辆路径问题是装箱问题与需求可拆分车辆路径问题的组合,且两者都属于典型的组合优化问题,属于NP难问题,其计算复杂性已经远远超过单独求解车辆路径问题与装箱问题,本文首先建立2L-SDVRP数学模型,并在此基础上设计了以改进遗传算法作为算法框架,结合改进BLF装箱算法,能求解2L-SDVRP的启发式算法(BLF-GA算法).1.1 2L-SDVRP模型建立2L-SDVRP可以定义为:图G=(V,E),顶点集V=(1,2,…,n),其中:1,n表示物流中心(车辆从物流中心出发,最后回到物流中心),其余为客户需求点E={(i,j)|i,j∈V}为边集;Dij表示i和j两点之间的路线距离,也代表车辆由i行驶到j的成本;车场拥有vh辆车,每辆车的最大载重量为Q,单车最大行驶距离为Dmax;tik表示第k辆车在i点装载的需求量;qi表示每个客户点的需求量;Zi 表示每个客户点需求量的单位重量.定义ITi为客户点i所要求配送的mi个矩形物品集合; ITi中物品总重gi.ITi中物品m(Iim)的底面投影为lim(物品水平方向长度)×Wim(物品垂直方向长度)的矩形(在以下数学模型中会增加下标k表示该物品放入对应车辆).令车厢俯视图(车头在下)左下角为(0,0)坐标原点,水平向右、垂直向上为坐标轴.设物品Iim左下角坐标为(vim,him)(在以下数学模型中会增加下标k表示该物品放入对应车辆).定义变量:k∈{1,2,…,vh}式(1)中的变量取1时表示第k辆车从i点行驶到j点;反之,则为0;模型假设:1) 所有客户点的需求量及坐标位置均已知;2) 同一客户点需求量可以大于1,但货物相同,即重量和尺寸相同;3) 任意两节点间的距离对称Dij=Dji;4) 任意两节点之间符合三角不等式Dij+Djk≥Dik;5) 所有车辆从配送中心出发,任务完成后均返回配送中心等待下次任务.则2L-SDVRP数学模型如下:∀j∈{1,2,…,n},∀p∈{2,3,4,…,n-1};k∈{1,2,…,vh},∀i∈{2,3,4,…,n-1}0≤vimk≤W-wimk,∀i∈{2,…,n-1},m∈{1,2,…,mi},k∈K0≤himk≤L-limk,∀i∈{2,…,n-1},m∈{1,2,…,mi},k∈{1,2,…,vh}himk+limk≤hi′m′k,∀i,i′∈{2,…,n-1},m∈{1,2,…,mi},m′∈{1,2,…,mi′},k∈{1,2,…,vh},i≠i′vimk+wimk≤vi′m′k,∀i,i′∈{2,…,n-1},m∈{1,2,…,mi},m′∈{1,2,…,mi′},k∈{1,2,…,vh},i≠i′vimk≥vi′m′k,∀i,i′∈{2,…,n-1},m∈{1,2,…,mi},m′∈{1,2,…,mi′},k∈{1,2,…,vh},i≠i′himk+limk≤hi′m′k, ∀i,i′∈{2,…,n-1},m∈{1,2,…,mi},m′∈{1,2,…,mi′},k∈{1,2,…,vh},i≠i′hi′m′k+li′m′k≤himk,∀i,i′∈{2,…,n-1},m∈{1,2,…,mi},m′∈{1,2,…,mi′},k∈{1,2,…,vh},i≠i′式(2)给出模型优化目标为车辆行驶总路径长度最短;式(3)表示每个客户点至少有一辆车进行配送;式(4)表示车辆流量守恒,即车辆驶入某点完成任务后就驶出该点;式(5)表示客户的所有需求必须完成;式(6)表示车辆载重约束,即某条线路上车辆所服务客户的所有或部分需求对应的重量不能超过车辆的最大载重量. 式(7)、式(8)表示每条路径上物品以固定方向都能装入车内;式(9)、式(10)表示物品不能相互叠放;式(11)~(13)保证装箱物品能按序不受阻挡以物品装入方向直线移进移出;式(14)为行驶距离限制.1.2 ZL-SDVRP解的特征定理1 考虑装箱约束可行解集合⊆不考虑装箱约束可行解集合.证明:假设R为不考虑装箱约束时的不可行解集合,r1∈R;S为不考虑装箱约束时的可行解集合,r2∈S.1)从2L-SDVRP模型中可知,装箱约束为模型中的式(6)~(12).r1为不考虑装箱约束时的不可行解,即r1不满足式(2)~(5)中的任意一个约束条件或者几个,那么r1必定也为考虑装箱约束时的不可行解;2)r2为不考虑装箱约束时的可行解,即r2满足式(2)~(5)中的任意一个约束条件.但是考虑装箱约束后,一条配送路线上客户需求的货物不一定能全部装上车,即r2不一定是考虑装箱约束的可行解.因此,在2L-SDVRP模型中,考虑装箱约束的可行解一定也是不考虑装箱约束的可行解.证毕.推论1 考虑装箱约束的最优值≥不考虑装箱约束的最优值.证明:由定理1已知考虑装箱约束可行解集合⊆不考虑装箱约束可行解集合,可得考虑装箱约束的最优解∈不考虑装箱约束可行解集合.假设不考虑装箱约束的最优值>考虑装箱约束的最优值,那么不考虑装箱约束的最优解∉考虑装箱约束可行解集合,与考虑装箱约束可行解集合⊆不考虑装箱约束可行解集合发生矛盾,假设不成立.原命题成立.证毕.BLF-GA算法是在改进的遗传算法框架上再结合BLF算法[7]设计的,算法步骤如下:步骤1:初始化步骤1.1 调用Distanse生成客户点之间的欧式距离;步骤1.2 调用InitPop生成初始种群;步骤2:循环for gen=1:MAXGENfor i=1:NIND步骤2.1调用SDVRP得到种群中所有个体的具体路线以及路线长度(未考虑装箱约束);end步骤2.2 调用Fitness得到最优路线长度的倒数;步骤2.3 选择操作:嵌套调用函数(第一次调用函数Select,在Select函数中调用Sus函数)得到SelCh步骤2.4 交叉操作:将SelCh作为交叉对象调用intercross函数,更新SelCh;步骤2.5 变异操作:用rand函数随机生成0-1的小数,并与变异概率对比,确定是否变异,若发生变异,更新SelCh;步骤2.6 重插入子代的种群:为了保持种群大小不变,经过选择、交叉及变异操作后,除了SelCh,还应插入Chrom-SelCh的个体,才能保持种群的大小不变;end(停止准则:达到最大迭代次数时停止循环)步骤3:装箱检验步骤3.1 将上述未考虑装箱约束得到的最优路线调用zhuangxiangtest函数,检验每辆车的货物是否符合装箱(装箱时不仅要满足每条路线上客户的货物都能装上,还需满足先配送的客户货物后装以及同意顾客货物面积大的放在面积小的下方的原则).若有路线不满足装箱,则进行步骤4.步骤4:循环for gen=1:MAXGENfor i=1:NIND步骤4.1调用SDVRP得到种群中所有个体的具体路线以及路线长度(考虑装箱约束);end步骤4.2 调用Fitness得到最优路线长度的倒数;步骤4.3 选择操作:嵌套调用函数(第一次调用函数Select,在Select函数中调用Sus函数)得到SelCh步骤4.4 交叉操作:将SelCh作为交叉对象调用intercross函数,更新SelCh;步骤4.5 变异操作:用rand函数随机生成0-1的小数,并与变异概率对比,确定是否变异,若发生变异,更新SelCh;步骤4.6 重插入子代的种群:为了保持种群大小不变,经过选择、交叉及变异操作后,除了SelCh,还应插入Chrom-SelCh的个体,才能保持种群的大小不变;end(停止准则:达到最大迭代次数时停止循环)经过BLF-GA算法得到的最终结果则为2L-SDVRP的最优解.考虑到2L-SDVRP问题的复杂性,本文使用直接表示的方法对可行解进行表示,即每个解是按照车辆的访问顺序生成的,不再需要其他计算资源进行解码操作,可以降低求解的复杂度. 2.1 编码操作考虑到需求可分的特殊性,本算法直接采用自然数进行编码来形成个体,如:表示含义:客户1需求为2,客户2需求为2,客户3需求为2,客户4需求为1,客户5需求为3,需求总量为10.2.2 初始化种群采用“随机”的方法生成初始种群.2.3 适应度评价用适应度可以评价个体的优劣.在该遗传算法中,评价公式为:E=z+Ps,由于2L-SDVRP是求最小值问题,因此根据遗传算法对适应度函数的要求,该个体的适应度f可以用以下方法计算:将由评价公式所得值的倒数视为个体的适应度,即.其中,E为评价值,z为个体目标函数值,在违反车辆最大载重约束、违反最远行驶距离约束以及不满足装箱约束的情况下直接视为不可行解;在满足这3个约束的前提下,若违反推论2,[10-11]即需求拆分不可行,则给予惩罚权重Ps.2.4 选择操作该算法所采用的是精英选择策略.2.5 交叉操作采用部分映射的方法,从被选择的个体中随机抽取两个个体进行交叉.为了保持各点需求量满足要求,对交叉原则进行改进如下:例如,将染色体[5,8]之间的元素进行交叉:染色体a:染色体b:交叉后得到两个新染色体:染色体a1:染色体b1:从交叉后的染色体分布可以看出:各个点的需求量不满足要求,需要做出调整,使其满足需求量.如在染色a1中客户点3的需求量多出2个单位,客户点2的需求量多出1个单位,然后客户点1、4、5都分别少了1个单位.所以随机选取客户点3和2多出的元素变为0,然后再将这些0元素用1、4、5去替补.经过交叉操作后的两个染色体为:染色体a2:染色体b2:该方法可以保证群体得到新的染色体进行进化,进而得到最优解.2.6 变异操作变异策略采取随机选取两个点,将其对换位置.例如将下面染色体进行变异:产生两个[1,15]范围内的随机整数,确定位置,将其对换位置,如4、7两个位置.变异后为:2.7 进化逆转操作为了对遗传算法的局部搜索能力进行改善,在程序执行完选择、交叉、变异操作之后引进连续多次的进化逆转操作.进行进化逆转操作后,形成的新个体,只有个体适应度值有提高的才会留下来.产生两个[1,10]范围内的随机整数,确定两个位置,将其对换位置,如4、8两个位置进化逆转后为设某配送问题有20个客户,其中编号1表示配送点.这些客户分布在x,y坐标为[0,20]的一个区域内,车场坐标为(15,13);进行配送服务的车辆类型相同,其中车厢长度为L=10,宽度为W=20,每辆车的载重量为10,每辆车的最大行驶距离不超过50;每个客户点的坐标以及需求量,如表1所示.每个客户的需求单位化后对应货物投影在箱底的长度、高度如表2所示,每个客户点所需求的货物尺寸相同.实验中遗传算法参数种群规模为200;进化代数取900;选择概率GGAP=0.9,交叉概率Pc=0.9,变异概率Pm=0.05;惩罚权重Ps=1000.3.1 运行结果算法采用MATLAB实现.所有计算在操作系统Windows 7,配置为Intel(R) Pentium(R)****************,2.00 GB内存电脑上完成.针对2L-SDVRP,分别求解考虑装箱约束和不考虑装箱时的最优值及最优路线.图1 和图2是考虑装箱约束时的算法进化过程图和最优路线图,图3 和图4是不考虑装箱约束时的算法进化过程图和最优路线图.表3是考虑装箱约束与不考虑装箱约束时所得最优结果的比较,表4是不考虑装箱约束时所得最优路线的装箱检验结果.从表3可以得出,当考虑装箱约束时用BLF-GA算法所得的最优值大于不考虑装箱约束时的最优值.从表4可以得出,不考虑装箱约束时所得的最优路线中存在两条不满足装箱约束的路线:路径6和路径8.注:是否满足装箱约束一栏中“0”表示不满足装箱;“1”表示满足装箱.本文研究的2L-SDVRP是二维装箱问题与需求可拆分问题的结合,并针对这个组合优化问题建立了相关的数学模型,提出了BLF-GA算法,成功求解了2L-SDVRP.通过比较2L-SDVRP中考虑装箱约束和不考虑装箱约束的运行结果,发现:当不考虑装箱约束时所得的最优路线存在不满足装箱约束的情况,并且考虑装箱约束时所得的最优值大于不考虑装箱时的最优值.考虑装箱约束得到的最优路线由于较好地处理了被装货物尺寸与车厢尺寸之间的关系,所以不会出现分配给一辆车的配送任务由于无法装箱而重新分配,最终导致出现重复装卸货物的现象,不仅使装卸成本降到最低,而且提高了配送的服务水平.【相关文献】[1] Dantzig G.,Ramser J..The truck dispatching problem[J]. ManagementSeience,1959(6):80-91.[2]彭勇,谢禄江,刘松.时变单车路径问题建模及算法设计[J].重庆交通大学学报:自然科学版,2013,32(2):263-266.[3]彭勇,何俊生.实时路网单车多任务物流配送路径优化[J].重庆交通大学学报:自然科学版,2014,33(2):122-125.[4] Dror. M.,Trudeau. P.,1989. Savings by split delivery routing[J]. Transportation Science 23, 1989:141-145.[5] Frizzell P.,Giffin J..The bounded split delivery vehicle routing problem with grid network distances[J].Asia Pacific Journal of Operational Research,1992(9):101-116.[6]Frizzell P.,Giffin J..The split delivery vehicle scheduling problem with time windows and grid network distances[J].Computers& Operational Research,1995(22):655-667.[7] Chi-Guhn Lee,Marina A. et al. A shortest path approach to the multiple-vehicle routing problem with split pick-ups[J]. Transporation Research,2006(40):265-284.[8]彭勇,宋其勤.带二维装箱约束的团队定向问题模型及优化算法[J]. 重庆交通大学:自然科学版,2016,35(3):141-147.[9]武晓今,朱仲英.二维装箱问题的一种实现方法[J].微型电脑应用,2003,19(4):20-23.[10]Dror M.Trudeau P.. Savings by split delivery routing.Transportation Science,1989,23(2):141-145.[11]Dror M.Trudeau P. Split delivery routing.Naval Research Logistics,1994,50(3):239-254.。
二维坐标点形状匹配算法

二维坐标点形状匹配算法1.引言1.1 概述概述二维坐标点形状匹配算法是指在给定一组二维坐标点的情况下,根据其位置、形状和特征等属性进行匹配和比较的算法。
这种算法广泛应用于图像处理、模式识别、计算机视觉和机器学习等领域。
随着科技的进步和应用领域的不断拓展,对数据的处理和分析需求也越来越多样化和复杂化。
在二维坐标点数据中,我们往往需要寻找相似的形状或者对不同形状进行匹配、对比和识别,以满足特定的分析目的。
在点形状匹配算法中,我们需要考虑一些重要的方面,如点的位置关系、形状的特征提取和相似性度量等。
算法的设计和选择对于匹配的准确性和性能有着关键的影响。
本篇文章将介绍两种常用的二维坐标点形状匹配算法,并逐步展开讨论其具体实现和应用场景。
在这两种算法中,我们将聚焦于要点1和要点2等关键问题,并探讨其原理和优缺点。
最后,我们将通过对比实验和收集的数据来总结所提出的算法的优势和不足之处,并展望未来的研究方向和可能的改进方法。
通过本文的阅读,读者将能够了解到二维坐标点形状匹配算法的基本原理和应用场景,理解其中的关键问题和挑战,并能够在实际的数据处理和分析中应用这些算法,提高匹配的准确性和效率。
文章结构部分的内容可以从以下几个方面进行展开:1.2 文章结构本文将分为引言、正文和结论三个部分来介绍二维坐标点形状匹配算法。
- 引言部分将对本文的主题进行概述,简要介绍二维坐标点形状匹配算法的背景、意义和应用领域。
- 正文部分将详细介绍两种点形状匹配算法。
其中,2.1节将介绍点形状匹配算法1,包括该算法的原理、流程和关键要点。
2.2节将介绍点形状匹配算法2,同样包括该算法的原理、流程和关键要点。
每个算法的要点将在子节中进行详细解释,并给出示意图和实例来帮助读者更好地理解。
- 2.1.1节将重点介绍点形状匹配算法1的要点1,解释该要点在算法中的作用和意义。
- 2.1.2节将重点介绍点形状匹配算法1的要点2,进一步深入探讨该要点的具体实现方法和应用场景。
百家论坛
百家论坛王冰川,王 勇 /中南大学摘 要:约束优化问题是科学研究和工程实践中普遍存在的一类优化问题,因而如何对约束优化问题进行求解具有十分重要的理论意义和实际应用价值。
约束优化进化算法的核心是约束处理技术,而如何平衡约束条件和目标函数又是设计约束处理技术的关键。
因此,根据平衡约束条件和目标函数方式的不同,本文对常用的约束处理技术进行了分类并分析了其工作原理,并且对所对应的约束优化进化算法的最新研究进展进行了介绍。
最后指出了该领域值得进一步研究的方向。
实际应用中的汽车设计[1]、生产调度[2]、电路设计[3]、电力系统优化设计[4]、天线优化设计[5]等都可以建模成约束优化问题。
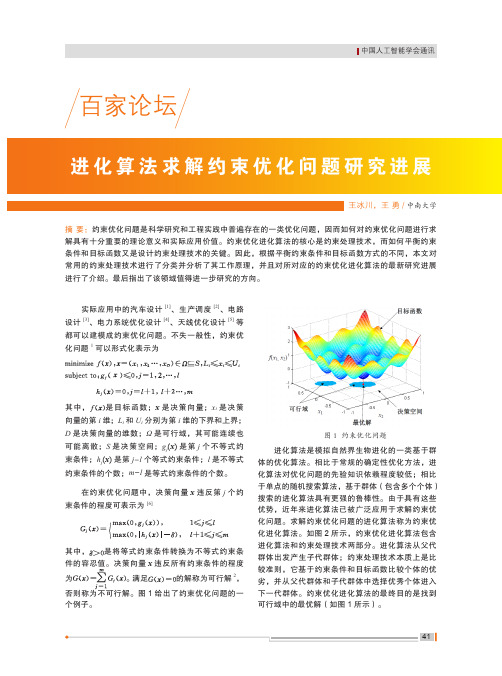
不失一般性,约束优化问题1可以形式化表示为其中,是目标函数;x是决策向量;x i是决策向量的第i维;L i和U i分别为第i维的下界和上界;D是决策向量的维数;Ω是可行域,其可能连续也可能离散;S是决策空间;g j(x)是第j个不等式约束条件;h j(x)是第j-l个等式约束条件;l是不等式约束条件的个数;m-l是等式约束条件的个数。
在约束优化问题中,决策向量x违反第j个约束条件的程度可表示为[6]其中,是将等式约束条件转换为不等式约束条件的容忍值。
决策向量x违反所有约束条件的程度为。
满足的解称为可行解2,否则称为不可行解。
图1给出了约束优化问题的一个例子。
图1 约束优化问题进化算法是模拟自然界生物进化的一类基于群体的优化算法。
相比于常规的确定性优化方法,进化算法对优化问题的先验知识依赖程度较低;相比于单点的随机搜索算法,基于群体(包含多个个体)搜索的进化算法具有更强的鲁棒性。
由于具有这些优势,近年来进化算法已被广泛应用于求解约束优化问题。
求解约束优化问题的进化算法称为约束优化进化算法。
如图2所示,约束优化进化算法包含进化算法和约束处理技术两部分。
进化算法从父代群体出发产生子代群体;约束处理技术本质上是比较准则,它基于约束条件和目标函数比较个体的优劣,并从父代群体和子代群体中选择优秀个体进入下一代群体。
二维Mesh结构的片上网络中利用全局信息的路由算法

二维Mesh结构的片上网络中利用全局信息的路由算法I. 引言- 背景介绍- 目标与意义II. 相关工作- 二维Mesh结构的优势与特点- 目前常见的路由算法及其特点III. 全局信息路由算法设计- 算法思路与流程- 从理论上证明算法正确性- 算法的复杂度分析IV. 算法实现与性能评估- 硬件实现细节介绍- 算法的性能评估- 仿真环境与参数设置- 实验结果分析V. 结论与未来工作- 系统总结与评价- 对算法的改进方向进行讨论- 未来进一步研究的展望VI. 参考文献第1章节:引言随着集成电路技术的不断发展和进步,片上网络逐渐成为越来越重要的研究方向之一。
在片上网络中,二维Mesh结构是目前常用的一种网络结构,具有结构简单、可扩展性强等优势。
然而,随着系统规模的不断增大,Mesh结构中的路由问题变得越来越复杂,如何提高路由的效率成为了一个亟待解决的问题。
目前,针对Mesh结构的路由算法有很多种,如Dijkstra算法、Floyd算法、A*算法等,这些算法都具有各自的优缺点。
全局信息路由算法就是一种以算法效率为主要考虑因素的路由算法,它利用全局信息来指导路由,可以大大提高路由的效率。
本论文将围绕二维Mesh结构的片上网络,提出一种利用全局信息的路由算法,并在FPGA硬件平台上进行实现和性能评估。
这种算法采用了基于贪心思想的A*算法,并在此基础上做了优化。
算法的主要思路是,在某个节点需要进行路由时,找到目标节点和当前节点之间的曼哈顿距离,然后根据距离大小来选择下一个节点,以此类推,直到到达目标节点。
本论文主要分为五个章节:第一章是引言,首先介绍了片上网络中路由问题的重要性以及本论文的研究目标和意义。
第二章对在二维Mesh结构中路由问题展开了探讨,包括Mesh结构的优势和现有的路由算法及其特点。
第三章是全局信息路由算法的设计,详细说明了算法的思路、流程以及正确性证明和复杂度分析。
第四章是算法的实现与性能评估,主要介绍了硬件实现的细节,以及仿真环境和参数设置等实验细节。
二维Fused矩阵逻辑回归模型优化方法
二维Fused矩阵逻辑回归模型优化方法二维Fused矩阵逻辑回归模型优化方法摘要:随着数据量的不断增加以及人工智能技术的发展,矩阵逻辑回归模型在各领域得到了广泛应用。
在许多实际应用中,数据往往有明显的二维结构,并且相邻的数据之间存在一定的相关性,因此,本文提出了一种二维Fused矩阵逻辑回归模型,通过将数据表示为二维矩阵,同时考虑各个维度之间的相关性,有效地提高了预测精度。
本文针对二维Fused矩阵逻辑回归模型的训练过程中存在的问题,提出了一种基于联合优化的训练方法,通过联合优化权重矩阵和Fused矩阵的迭代更新,实现了模型的优化。
实验结果表明,本文所提出的二维Fused矩阵逻辑回归模型的预测精度明显优于传统的矩阵逻辑回归模型。
关键词:矩阵逻辑回归模型;二维Fused矩阵;联合优化;预测精度1. 引言逻辑回归模型是一种广泛应用于分类问题的监督学习算法。
在实际应用中,数据往往不仅具有一定的相关性,而且还存在一定的二维结构。
因此,传统的矩阵逻辑回归模型无法很好地处理这种情况。
为了解决这个问题,本文提出了一种二维Fused矩阵逻辑回归模型。
该模型通过将数据表示为二维矩阵,并同时考虑各个维度之间的相关性,有效地提高了预测精度。
2. 相关工作矩阵逻辑回归模型是常用的分类算法之一。
该模型通过将特征表示为矩阵,并利用矩阵乘法实现分类。
近年来,矩阵逻辑回归模型受到了广泛的关注和研究,如将矩阵逻辑回归模型应用于图像分类、推荐系统等领域,并取得了良好的效果。
3. 二维Fused矩阵逻辑回归模型为了更好地处理数据中的二维结构和相关性,本文提出了一种二维Fused矩阵逻辑回归模型。
该模型将数据表示为二维矩阵,并同时考虑各个维度之间的相关性。
具体地,在模型中引入Fused矩阵,通过将原始矩阵和Fused矩阵进行加权求和,实现了数据的有效表示。
同时,在模型中引入二维卷积操作,通过卷积操作寻找矩阵中的局部特征,进一步提高了预测精度。
第六章 约束优化方法

重复上述步骤,迭代点可沿S ( 1 )方向前进,直至到
达某搜索点不能同时符合下降性和可行性要求时停止。
此时废弃该搜索点,并退回到前一个搜索成功点作为作 为S(1)方向搜索中的最终成功点,记为X (1)。
若在初始点X ( 0 )或某个换向转折点处(如图中的X (1)点), 沿某随机方向的探索点目标函数值增大(如图中的A点、 C点)或者越出可行域(如B点、D点),则应相应弃掉
2)把上述满足要求的终点作为新的起点,重新产 生随机方向,如果能够找到一个合适的方向,同时满足 条件,则沿该方向以原步长继续搜索;如若找不到适合 的方向,则将步长减半,仍以该点为起点随机搜索,如 果能找到新的方向,则沿该方向继续,如果不能,步长 再减半。直到找不到新的搜索方向,且步长满足精度要 求,则以该起点为最优点。
③要求可行域为有界的非空集,即在有界可行域 内存在满足全部约束条件的点,且目标函数有定义。
a)可行域是凸集;b)可行域是非凸集
2、间接法
该方法可以求解等式约束优化问题和一般约束优化 问题。对于不等式约束问题和等式约束间题均有效。
其基本思想是将约束优化问题通过一定的方法进行 改变,即是按照一定的原则构造一个包含原目标函数 和约束条件的新目标函数,将约束优化问题转化为无 约束优化问题,再采用无约束优化方法进行求解。属 于间接法的约束问题的最优化方法有消元法,拉格朗 日乘子法,增广拉格朗日乘子法和惩罚函数法等。
1)输入设计变量的下限值和上限值,即
ai ≤ xi ≤ bi
2)在区间(0,1)内产生n个伪随机数 ri (0 ≤ ri ≤ 1)
3)计算随机点x的各分量
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1= ,此 时该 图形只能整 体 平 动 ,故认 为 该 图形 为满 约束 42 图形 。在后续的单环之 间的约束求 解中 ,可 以进一步将该 图 形进行整体平移或旋转 。 为 了便 于求解 ,我 们用有 向图Gv.T 形式来描 述 图形 C)
的拓扑结构 。其中V { d t ,、 = v o} , . , } 是G的组成元 素.o. 元 df 是该 素 的剩余 自由度 ;CT 是V相关约束 的集合 。C = j T { 。
【 ywo d 】Ge merc o sr i t Ke r s o ti c n ta n :No — i ce r p n d r tdg a h:D roe r p e ic tdg a h:D g e f r e o e r e f ed m o
E前 ,参 数化 设计 方法在C l AD技术领 域的应 用越来 越
为构成 拓扑结构 的几何要素和表 面轮廓要素. 可导 出各 形状 结构 的位置和形状参 数 ,从而 形成参数 化的产品几何模型 。 目前 ,约束 求解算法主要有两种 :一种是代数法 ,即将
W ANG Ga g,J ANG Ho g h n,YU r n,ZHAO a s e n l n ce Da e W n h ng
f t r i e s yo c n lg Ha b n 1 0 0 a bn Un ri f Teh o y, r i 5 0 1) l t o 【 s r c 】 B s d o n lzn h rt a d f u t i t e g o ti e n tan a ifci n a g rt m fr t e p ee t hs a t l p t Ab ta t a e n a ay i g t e me i n a l n h e mere o sr i t t a t l o i o h r s n ,t i ri e us s s s s o h e
பைடு நூலகம்
广 泛 ,是C AD技术 的发展 方 向之 一 ,而约束求 解则 是参数 化设计 的核心内容 。通常约束分为基约束、尺寸约束和几何 约束 。基约束描述一个实体相对于其他 实体 的位置 ;儿何约 束用来约束各几何元素 问的固定联系 ;尺寸约束则用来约束
各几何元素 的大小尺 寸。将基 约束 、尺 寸约束、几何约束作
维普资讯
第2 卷 第 1 期 8 0
0.8 t2 № l O
计
算
机
工
程
2 0 年 1 月 02 0
0c o r2 02 t be 0
Co pu e m t rEng ne r ng i ei
.
博 士论 文 ・
文章编号:10— 48 I2 0 2 00 32() ) — 03 3 2I l l —
2 - h.Thi m e h d s e fc e no g t o h u lc ns r i a sa t n V r e n t a n e ii n y t e wa fc m b ni g i I ap s t o i f inte u h o s br t c f l o t a nts f f e i i e i on a d O e o s r i t d c so b h y o o i n smpl e r a o i n n i e ra g br i qu to l r t m . h a i , c l fn nl e r a g b a c e a o e e s n ng a d no ln a l e a c e a i nsa go ih Att e s me tme s a e o o i a l e r i qu t nsr due d b a n t i e h d. n i e y f r i h s m t o w h c i p i e h o t a n a sa to l o ih an ppr v s t ee f i n ) i h sm lf st e c ns r i ts t f c n a g r t m d a i i i o e h f ee c i .
fr、r evo t l loi m fr2 ul o sr it Ad pigd ge ffed m p o i taey tea oi m g n r tstedrce b、a dan 、 pi g rt D flc n tan. o t e reo re o r rt srtg .h l rt e eae h ietd ma a h o n i y g h
文献标识码: A
中 图分类号: T 32 P1
二维全约束优化算法的研 究
王 刚 , 姜洪 臣, 于达仁 , 赵 万生
( 哈尔滨工 业大学 ,哈尔滨 l0 0 ) 50 1 摘 要 : 从工程实 际出发 ,分析 了现 有的几何约束求解方法 中存在 的问题 ,提 出了一种新 的二维全约束优化算法 。该方法采用 自由度优先 搜 索策略 生成 有向图 ,用 简单推理和代 数方程组综合 方法 求解 ,较好地 解决 了满约束 求解 和过约束 判断问题 ,大大减小 了非线性 方程组 的 规
模 ,使得 约束问题的求解得到简化 ,提 高了求解效率 。 关键词 : 几何约束 ;无向图 ;有向图 ;自由度
R s a c 1 O p i a g rt e e r hO1 tm l Al o i hm o D l Co s r i tS l i g f r2 Fu l n t a n o v n