工业缝纫机无刷电机控制板说明书
富山牌工业缝纫机说明书

为了您的安全使用 Safety Instructions
1.安全使用的标记及其意义 Safety indications and their meanings
本使用说明书及产品所使用的标记和图案记号是为了您的安全而正确的使用产品,防止您及其他人受到危害和损 害。表示方法机含义如下 This instruction manual and the indications and symbols that are used on the machine itself are provided in order to ensure safe operation of this machine and to prevent accidents and injury to yourself or other people.
安 装 Installation
请让受过培训的技术人员来安装缝纫机。
请委托购买商店货电气专业人员进行电气配线。
缝纫机重量约 50Kg,安装工作必须由两人以上 来完成。
在安装完成前,请不要连接电源,如果误按启动 开关,缝纫机动作会导致受伤。
请在切断电源后,再拔掉电插头。 不然易成为控制箱发生故障的原因。
工业缝纫机的特性之一,因为要在机针和旋梭等运动部件附近进行操作,而这些零部件很容易引起受伤的危险, 所以请在受过培训的人或熟练人员的安全操作知识的指导下,正确的使用本缝纫机。 With industrial sewing machines, it is normal to carry out work while positioned directly in front of moving parts such as the needle and thread take-up, and consequently there is always a danger of injury that can be caused operation before operating the machine so that you will know how to use it correctly.
无刷电机驱动器说明书
80
58
120
重量
Kg
驱动器接品图
无刷直流电机驱动器说明书
BLDC Motor Driver Manual Rev2.1
BLDC MoTor river
浅绿色 粉红色
棕色 白色
橙色(+5V) 紫色(SP) 灰色(GND)
绿色(复位) 红色(+5V) 黑色(GND) 蓝色(RXD) 黄色(TXD)
开/停 启停控制线 无水断电开关
控制方式
有霍尔电源保护刹车电阻马达相数 速度控制方式
输入信号
3Φ 面板调速/调速器调速 DC-DC 光电隔离信号:运行,停止
通讯方式 输出信号
RS232 无
保护功能
下列保护功能使能时,故障信号输出,马达停止转动:
1,霍尔相序错误保护, 2,运行中霍尔损坏或失速保护 3,硬件检测过流保护 4,软件检测过流保护 5,电机堵转保护 6,输入电源欠压过压保护 7,驱动器内部过热保护
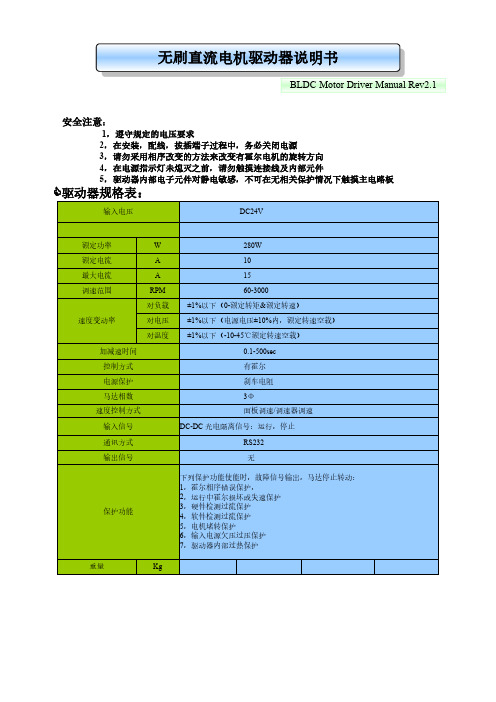
驱动器规格表:
输入电压
DC24V
额定功率
W
额定电流
A
最大电流
A
调速范围
RPM
对负载
速度变动率
对电压
对温度
加减速时间
280W 10 15 60-3000 ±1%以下(0-额定转矩&额定转速) ±1%以下(电源电压±10%内,额定转速空载) ±1%以下(-10-45℃额定转速空载) 0.1-500sec
无刷直流电机驱动器说明书
BLDC Motor Driver Manual Rev2.1
安全注意:
1,遵守规定的电压要求 2,在安装,配线,拔插端子过程中,务必关闭电源 3,请勿采用相序改变的方法来改变有霍尔电机的旋转方向 4,在电源指示灯未熄灭之前,请勿触摸连接线及内部元件 5,驱动器内部电子元件对静电敏感,不可在无相关保护情况下触摸主电路板
基于永磁无刷直流电机的工业缝纫机控制系统设计

编 程 和处 理 的称 为 “ 子控 制 系统 ” 其 中电 子控 制技 术 较 为简 单 。 电 , 由 此 可 见 . 速 增 大 的 市 场 空 间 与 相 对 短 缺 的 供 应 水 平 构 成 了 飞
1 1系 统 硬 件 概 述 .
根 据 工 业 缝 纫 机 控 制 系 统 的 实 际 要 求 ,采 用 了 以 单 片 机 为 核 心
国 际 先 进 水 平 相 比 , 有 一 定 差 距 , 别 是 在 中 高 端 产 品 领 域 , 内 品 牌 的 竞 争 优 势 和 品 牌 优 势 还 未 充 分 体 尚 特 国 现 。针 对 这 一 情 况 , 文 对 工 业 缝 纫 机 机 控 制 系 统 进 行 了 研 究 。利 用 单 片 机 技 术 完 成 系 统 的 控 制 、 算 , 及 本 计 以
极 大 的 对 比 . 而 也 鲜 明 体 现 出 智 能 化 工 业 缝 纫 机 控 制 系 统 的 巨 大 的 控 制 器 。 合 功 率 驱 动 电 路 、 量 电 路 、 离 电 路 、 感 器 电 路 、 因 结 测 隔 传 脚 前 景 和 发 展 空 间 。 所 以 机 电一 体 化 的 产 品 应 该 是 今 后 我 国 缝 制 机 械 踏 板 电 路 、 盘 和 显 示 电 路 组 成 的 控 制 系 统 。 键
1 系 统 设 计 总 方 案 12 系 统 控 制 策 略 分 析 .
缝 纫 机 伺 服 系 统 是 一 个 多 变 量 、 线 性 、 藕 合 、 滞 后 系统 。 非 强 大 系 统 的 性 能 指 标 要 求 系 统 有 良 好 的 快 速 性 和 速 度 稳 定 性 。 启 动 快 速 , 速 平 滑 且 有 一 定 的 抗 干 扰 能 力 。 系 统 希 望 速 度 能 及 时 跟 踪 给 调 定 , 负 载 变 化 或 者 出 现 扰 动 时 , 统 能 立 即 补 偿 , 用 速 度 开 环 系 当 系 使 统 是 无 法达 到要 求 的 。 因此 为 了满 足系 统 的抗 干扰 性 和 快 速 性 . 应 采 用 速 度 闭 环 控 制 。 但 是 。 仅 对 速 度 的 控 制 是 远 远 满 足 不 了 缝 纫 仅 机 伺 服 系 统 的 其 它 要 求 , 启 动 快 速 、 确 定 位 、 速 停 车 等 技 术 指 如 精 快 标 需 要 对 转 矩 进 行 良好 的 控 制 才 一 能 达 到 . 以 要 提 高 系 统 的 性 能 所 转 矩 控 制 是 关 键 。 电 机 的 转 矩 和 电 流 有 密 切 的 关 系 . 要 很 好 的 控 只 制 电 机 的 电 流 就 能 对 转 矩 进 行 良好 的 控 制 . 以 要 在 系 统 中设 计 电 所 流 环 , 控 制 电 机 电 流 的 变 化 。 样 不 但 可 以 减 少 转 矩 的 脉 动 . 可 来 这 还
TI无刷DC电机控制器UC1625-SP说明书

UC1625-SP ZHCS012A–SEPTEMBER2011–REVISED SEPTEMBER2011耐辐射V类,无刷DC电机控制查询样品:UC1625-SP特性•装有理想二极管的高速电流感应放大器•逐脉冲和平均电流感应•经QML-V标准认证,SMD5962-91689•过压及欠压保护•耐辐射:40kRad(Si)TID(1)•用于安全方向反转的方向闩•直接驱动功率场效应管(MOSFET)或者达灵顿功率管(Darlington)•转速计•50-V开路集电极高层驱动器•修整参考源30mA•锁存软启动•可编程交叉传导保护(1)辐射容限是基于初始器件鉴定(放射量率=10mrad/sec)的•两象限和四象限运算典型值。
可提供辐射批量接受测试——详情请与厂家联系。
说明/订购信息UC1625电机控制器在一个封装内集成了高性能无刷dc电机控制所需的大多数功能。
当与外部功率场效应管(MOSFET)或者达灵顿功率管(Darlington)耦合的时候,此器件在电压或者电流模式下件执行固定频率PWM 电机控制的同时执行闭环速度控制和具有智能噪音抑制功能的刹车,安全方向反转,和交叉传导保护。
虽然额定工作电压范围是10V至18V,UC1625可借助于外部电平位移组件来控制具有更高电源电压的器件。
UC1625含有用于低侧功率器件的快速、高电流推挽驱动器和用于高侧功率器件或者电平位移电路的50V开路集电极输出。
UC1625额定军用工作温度范围是-55°C至125°C。
ORDERING INFORMATION(1)ORDERABLE PARTT A PACKAGE(2)TOP-SIDE MARKINGNUMBER5962-9168902VYA–55°C to125°C CDIP–JT5962-9168902VYAUC1625-SP(1)For the most current package and ordering information,see the Package Option Addendum at the endof this document,or see the TI website at .(2)Package drawings,thermal data,and symbolization are available at /packaging.Please be aware that an important notice concerning availability,standard warranty,and use in critical applications of TexasInstruments semiconductor products and disclaimers thereto appears at the end of this data sheet.UC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011Typical ApplicationABSOLUTE MAXIMUM RATINGS (1)(2)over operating free-air temperature range (unless otherwise noted)VALUEUNITVCC 20Supply voltage PWR VCC20PWM IN–0.3to 6E/A IN(+),E/A IN(–)–0.3to 12V ISENSE1,ISENSE2–1.3to 6OV-COAST,DIR,SPEED-IN,SSTART,QUAD SEL –0.3to 8H1,H2,H3–0.3to 12PU Output Voltage–0.3to 50PU +200continuous PD ±200continuousE/A ±10Output currentmA I SENSE –10TACH OUT ±10VREF –50continuousT J Maximum Junction Temperature 150°C (1)Currents are positive into and negative out of the specified terminal.(2)Stresses above these ratings may cause permanent damage.Exposure to absolute maximum conditions for extended periods may degrade device reliability.These are stress ratings only and functional operation of the device at these or any other conditions beyond those specified is not implied.PWR VCCRC-OSC PWM IN E/A OUT VCC SSTART OV-COAST QUAD SEL E/A IN(-)ISENSE VREF H3SPEED-INH2ISENSE1ISENSE2DIR E/A IN(+)H1PDC PUB RC-BRAKE TACH-OUT PUA PDB PDAGNDPUCUC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011RECOMMENDED OPERATING CONDITIONSover operating temperature range (unless otherwise noted)MINNOMMAX UNIT V CC Supply Voltage 1018V PU Output Current+85mA continuous PD ±85mA continuousT AOperating temperature range-55125°CTable 1.THERMAL RATINGS TABLER θJA (°C/W)R θJC (°C/W)PACKAGE (Junction-to-ambient thermal resistance)(Junction-to-case thermal resistance)DIL-28(JT)43.14.95Figure 1.CONNECTION DIAGRAMUC1625-SPZHCS012A–SEPTEMBER2011–REVISED ELECTRICAL CHARACTERISTICSUnless otherwise stated,these specifications apply over the full temperature range,typical values at T A=25°C;Pwr V CC=V CC=12V;R OSC=20kΩto V REF;C OSC=2nF;R TACH=33kΩ;C TACH=10nF;and all outputs unloaded.T A=T J.PARAMETER TEST CONDITIONS MIN TYP MAX UNIT OverallSupply current14.530.0mAVCC turn-on threshold-55°C to125°C8.658.959.55V VCC turn-off threshold7.758.058.55 Overvoltage/CoastOV-COAST inhibit threshold 1.65 1.75 1.85OV-COAST restart threshold 1.535 1.65 1.75V-55°C to125°COV-COAST hysteresis0.050.100.155OV-COAST input current–10–110μA Logic InputsH1,H2,H3low threshold0.8 1.0 1.25-55°C to125°C V H1,H2,H3high threshold 1.6 1.9 2.0H1,H2,H3input current-55°C to125°C,to0V–400–250–120μAQUAD SEL,dir thresholds0.8 1.4 3.0VQUAD SEL hysteresis70130mVDIR hysteresis-55°C to125°C0.40.60.9VQUAD SEL input current–3050150μA DIR input current–30–130PWM Amp/ComparatorE/A IN(+),E/A IN(–)input current To2.5V–5.0–0.1 5.0μA PWM IN input current To2.5V0330Error amp input offset0V<V COMMON-MODE<3V–1010mVError amp voltage gain7090dBE/A OUT range25°C to125°C0.25 3.50V-55°C0.25 4.2 Pullup current To0V,25°C-16–10–5μATo0V,-55°C to125°C–17.5-5S STARTDischarge current To2.5V0.10.4 3.0mARestart threshold0.10.20.3V Current AmpGain I SENSE1=0.3V,I SENSE2=0.5V to0.7V 1.75 1.95 2.15V/VLevel shift I SENSE1=0.3V,I SENSE2=0.3V 2.4 2.5 2.65Peak current threshold0.140.200.26VI SENSE1=0V,force I SENSE2Over current threshold0.260.300.36I SENSE1,I SENSE2input current–850–3200To0VμAI SENSE1,I SENSE2offset current-12±212Range I SENSE1,I SENSE2–12V Tachometer/BrakeTACH-OUT high level 4.75 5.3-55°C to125°C,10kΩto2.5V V TACH-OUT low level0.2On time170220280μsOn time change with temp-55°C to125°C0.1%RC-BRAKE input current To0V–4.0–1.9mAUC1625-SP ZHCS012A–SEPTEMBER2011–REVISED SEPTEMBER2011ELECTRICAL CHARACTERISTICS(continued)Unless otherwise stated,these specifications apply over the full temperature range,typical values at T A=25°C;Pwr V CC=V CC=12V;R OSC=20kΩto V REF;C OSC=2nF;R TACH=33kΩ;C TACH=10nF;and all outputs unloaded.T A=T J.PARAMETER TEST CONDITIONS MIN TYP MAX UNIT Threshold to brake,RC-brake0.8 1.0 1.2V Brake hysteresis,RC-brake0.090.4-55°C to125°CSPEED-IN threshold220257290mVSPEED-IN input current–30–530μA Low-Side Drivers(1)Voh,–1mA,down from V CC 1.60 2.50Voh,–50mA,down from V CC 1.75 2.45-55°C to125°C V Vol,1mA0.050.4Vol,50mA0.360.9Rise/fall time10%to90%slew time,into1nF50500ns High-Side DriversVol,1mA0.10.4-55°C to125°C V Vol,50mA 1.0 1.8Leakage current Output voltage=50V30μAFall time10%to90%slew time,50mA load50ns OscillatorFrequency-55°C to125°C3080kHz ReferenceIref=0mA,25°C 4.85 5.0 5.15 Output voltage V-55°C to125°C 4.7 5.0 5.3 Load regulation0mA to–20mA load–40–5mV Line regulation10V to18V V CC–10–110Short circuit current-55°C to125°C20100150mA MiscellaneousOutput turn-on delay1μs Output turn-off delay1(1)Current available from these pins can peak as high as0.5A.QUAD SELRC-OSCPW M IN E/A OUT E/A IN(+) E/A IN(–)SSTARTISENSE ISENSE1 ISENSE2VCC OV-COASTDIR SPEED-INH1H2H3 RC-BRAKE PUAPUBPUCPDAPDBPDC GND TACH-OUT PW R VCC VREFUC1625-SPZHCS012A–SEPTEMBER2011–REVISED Block DiagramUC1625-SP ZHCS012A–SEPTEMBER2011–REVISED SEPTEMBER2011DEVICE INFORMATIONTerminal FunctionsTERMINALDESCRIPTIONNAME NO.The position decoder logic translates the Hall signals and the DIR signal to the correct driversignals(PUs and PDs).To prevent output stage damage,the signal on DIR is first loadedinto a direction latch,then shifted through a two-bit register.As long as SPEED-IN is less than250mV,the direction latch is transparent.WhenSPEED-IN is higher than250mV,the direction latch inhibits all changes indirection.SPEED-IN can be connected to TACH-OUT through a filter,so that the direction latch is onlytransparent when the motor is spinning slowly,and has too little stored energy to damagepower devices.Additional circuitry detects when the input and output of the direction latch are different,or DIR,SPEED-IN6,7when the input and output of the shift register are different,and inhibits all output drivesduring that time.This can be used to allow the motor to coast to a safe speed beforereversing.The shift register ensures that direction can not be changed instantaneously.The register isclocked by the PWM oscillator,so the delay between direction changes is always going to bebetween one and two oscillator periods.At40kHz,this corresponds to a delay of between25μs and50μs.Regardless of output stage,25μs deadtime should be adequate to ensureno overlap cross-conduction.Toggling DIR causes an output pulse on TACH-OUTregardless of motor speed.E/A IN(+)and E/A IN(–)are not internally committed to allow for a wide variety of uses.Theycan be connected to the ISENSE,to TACH-OUT through a filter,to an external commandvoltage,to a D/A converter for computer control,or to another op amp for more elegantfeedback loops.The error amplifier is compensated for unity gain stability,so E/A OUT canbe tied to E/A IN(–)for feedback and major loop compensation.E/A IN(+),E/A IN(–),E/A1,28,27,26E/A OUT and PWM In drive the PWM comparator.For voltage-mode PWM systems,PWM In OUT,PWM INcan be connected to RC-OSC.The PWM comparator clears the PWM latch,commandingthe outputs to chop.The error amplifier can be biased off by connecting E/A IN(–)to a higher voltage than/EAIN(+).When biased off,E/A OUT appears to the application as a resistor to ground.E/A OUTcan then be driven by an external amplifier.GND15All thresholds and outputs are referred to the GND pin except for the PD and PU outputs.The three shaft position sensor inputs consist of hysteresis comparators with input pullupresistors.Logic thresholds meet TTL specifications and can be driven by5-V CMOS,12-VCMOS,NMOS,or open-collectors.Connect these inputs to motor shaft position sensors that are positioned120electricaldegrees apart.If noisy signals are expected,zener clamp and filter these inputs with6-VH1,H2,H38,9,10zeners and an RC filter.Suggested filtering components are1kΩand2nF.Edge skew inthe filter is not a problem,because sensors normally generate modified gray code with onlyone output changing at a time,but rise and fall times must be shorter than20μs for correcttachometer operation.Motors with60electrical degree position sensor coding can be used ifone or two of the position sensor signals is inverted.The current sense amplifier has a fixed gain of approximately two.It also has a built-in levelshift of approximately2.5V.The signal appearing on ISENSE is:I SENSE=2.5V+(2×ABS(I SENSE1–I SENSE2))I SENSE1and I SENSE2are interchangeable and can be used as differential inputs.Thedifferential signal applied can be as high as±0.5V before saturation.If spikes are expected on ISENSE1or ISENSE2,they are best filtered by a capacitor fromISENSE to ground.Filtering this way allows fast signal inversions to be correctly processed ISENSE1,ISENSE2,by the absolute value circuit.The peak-current comparator allows the PWM to enter a3,4,5ISENSE current-limit mode with current in the windings never exceeding approximately0.2V/R SENSE.The overcurrent comparator provides a fail-safe shutdown in the unlikely case ofcurrent exceeding0.3V/R SENSE.Then,softstart is commanded,and all outputs are turnedoff until the high current condition is removed.It is often essential to use some filter drivingISENSE1and ISENSE2to reject extreme spikes and to control slew rate.Reasonablestarting values for filter components might be250-Ωseries resistors and a5-nF capacitorbetween ISENSE1and ISENSE2.Input resistors should be kept small and matched tomaintain gain accuracy.This input can be used as an over-voltage shut-down input,as a coast input,or both.ThisOV-COAST23input can be driven by TTL,5-V CMOS,or12-V CMOS.UC1625-SPZHCS012A–SEPTEMBER2011–REVISED Terminal Functions(continued)TERMINALDESCRIPTIONNAME NO.These outputs can drive the gates of N-channel power MOSFETs directly or they can drivethe bases of power Darlingtons if some form of current limiting is used.They are meant todrive low-side power devices in high-current output stages.Current available from these pins PDA,PDB,PDC12,13,14can peak as high as0.5A.These outputs feature a true totem-pole output stage.Beware ofexceeding device power dissipation limits when using these outputs for high continuouscurrents.These outputs pull high to turn a“low-side”device on(active high).These outputs are open-collector,high-voltage drivers that are meant to drive high-sidepower devices in high-current output stages.These are active low outputs,meaning thatthese outputs pull low to command a high-side device on.These outputs can drivePUA,PUB,PUC16,17,18low-voltage PNP Darlingtons and P-channel MOSFETs directly,and can drive anyhigh-voltage device using external charge pump techniques,transformer signal coupling,cascode level-shift transistors,or opto-isolated drive(high-speed opto devices arerecommended).(See applications).This supply pin carries the current sourced by the PD outputs.When connecting PD outputsdirectly to the bases of power Darlingtons,the PWR VCC pin can be current limited with a PWR VCC11resistor.Darlington outputs can also be"Baker Clamped"with diodes from collectors back toPWR VCC.(See Applications)The device can chop power devices in either of two modes,referred to as“two-quadrant”(Quad Sellow)and“four quadrant”(Quad Sel high).When two-quadrant chopping,thepulldown power devices are chopped by the output of the PWM latch while the pullup driversremain on.The load chops into one commutation diode,and except for back-EMF,willexhibit slow discharge current and faster charge current.Two-quadrant chopping can be QUAD SEL22more efficient than four-quadrant.When four-quadrant chopping,all power drivers are chopped by the PWM latch,causing theload current to flow into two diodes during chopping.This mode exhibits better control of loadcurrent when current is low,and is preferred in servo systems for equal control overacceleration and deceleration.The QUAD SEL input has no effect on operation duringbraking.Each time the TACH-OUT pulses,the capacitor tied to RC-BRAKE discharges fromapproximately3.33V down to1.67V through a resistor.The tachometer pulse width isapproximately T=0.67R T C T,where R T and C T are a resistor and capacitor fromRC-BRAKE to ground.Recommended values for R T are10kΩto500kΩ,andrecommended values for C T are1nF to100nF,allowing times between5μs and10ms.Best accuracy and stability are achieved with values in the centers of those ranges.RC-BRAKE also has another function.If RC-BRAKE pin is pulled below the brake threshold, RC-BRAKE21the device enters brake mode.This mode consists of turning off all three high-side devices,enabling all three low-side devices,and disabling the tachometer.The only things that inhibitlow-side device operation in braking are low-supply,exceeding peak current,OV-COASTcommand,and the PWM comparator signal.The last of these means that if current sense isimplemented such that the signal in the current sense amplifier is proportional to brakingcurrent,the low-side devices will brake the motor with current control.(See applications)Simpler current sense connections results in uncontrolled braking and potential damage tothe power devices.The UC1625can regulate motor current using fixed-frequency pulse width modulation(PWM).The RC-OSC pin sets oscillator frequency by means of timing resistor R OSC from theRC-OSC pin to VREF and capacitor COSC from RC-OSC to Gnd.Resistors10kΩto100kΩand capacitors1nF to100nF works the best,but frequency should always be below500kHz.Oscillator frequency is approximately:F=2/(R OSC x C OSC)RC-OSC25Additional components can be added to this device to cause it to operate as a fixed off-timePWM rather than a fixed frequency PWM,using the RC-OSC pin to select the monostabletime constant.The voltage on the RC-OSC pin is normally a ramp of about1.2V peak-to-peak,centered atapproximately1.6V.This ramp can be used for voltage-mode PWM control,or can be usedfor slope compensation in current-mode control.O n T i m eC T –m F1 m 10 m 100 m100 Hz1 kHz 10 kHz100 kHz 1 MHzO s c i l l a t o r F r e q u e n c yC OSC (m F)UC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011Terminal Functions (continued)TERMINAL DESCRIPTIONNAMENO.Any time that VCC drops below threshold or the sensed current exceeds the over-current threshold,the soft-start latch is set.When set,it turns on a transistor that pulls down on SSTART.Normally,a capacitor is connected to this pin,and the transistor will completely discharge the capacitor.A comparator senses when the NPN transistor has completely discharged the capacitor,and allows the soft-start latch to clear when the fault is removed.When the fault is removed,the soft-start capacitor charges from the on-chip current source.SSTART clamps the output of the error amplifier,not allowing the error amplifier output SSTART 24voltage to exceed SSTART regardless of input.The ramp on RC-OSC can be applied to PWM In and compared to E/A OUT.With SSTART discharged below 0.2V and the ramp minimum being approximately 1.0V,the PWM comparator keeps the PWM latch cleared and the outputs off.As SSTART rises,the PWM comparator begins to duty-cycle modulate the PWM latch until the error amplifier inputs overcome the clamp.This provides for a safe and orderly motor start-up from an off or fault condition.A 51-k Ωresister is added between VREF and SSTART to ensure switching.Any change in the H1,H2,or H3inputs loads data from these inputs into the position sensor latches.At the same time data is loaded,a fixed-width 5-V pulse is triggered on TACH-OUT.The average value of the voltage on TACH-OUT is directly proportional to speed,so this output can be used as a true tachometer for speed feedback with an external filter or TACH-OUT 20averaging circuit which usually consists of a resistor and capacitor.Whenever TACH-OUT is high,the position latches are inhibited,such that during the noisiest part of the commutation cycle,additional commutations are not possible.Although this effectively sets a maximum rotational speed,the maximum speed can be set above the highest expected speed,preventing false commutation and chatter.This device operates with supplies between 10V and 18V.Under-voltage lockout keeps all outputs off below 7.5V,insuring that the output transistors never turn on until full drive VCC 19capability is available.Bypass VCC to ground with an 0.1-μF ceramic ing a 10-μF electrolytic bypass capacitor as well can be beneficial in applications with high supply impedance.This pin provides regulated 5V for driving Hall-effect devices and speed control circuitry.VREF reaches 5V before VCC enables,ensuring that Hall-effect devices powered from VREF 2VREF becomes active before the UC1625drives any output.For proper performance VREF should be bypassed with at least a 0.1-μF capacitor to ground.TYPICAL CHARACTERISTICSOscillator FrequencyTachometer on Timevsvs C OSC and R OSCRT and CTFigure 2.Figure 3.-75Temperature –5C -50-250755025125100S u p p l y C u r r e n t – m A02468101214161820-75Temperature –5C-50-250755025125100S o f t S t a r t C u r r e n t – m A-15-14-13-12-11-10-9-8-7-6-5-75Temperature –5C-50-25755025125100S o f t S t a r t C u r r e n t – m A0.25.50.751.001.25I SENSE2 – I SENSE1 – VI S E N S E – V0.50.0-0.52.533.5UC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011TYPICAL CHARACTERISTICS (continued)Supply CurrentSoft-Start Pullup CurrentvsvsTemperatureTemperatureFigure 4.Figure 5.Soft-Start Discharge CurrentCurrent Sense Amplifier Transfer FunctionvsvsTemperatureI SENSE2–I SENSE1Figure 6.Figure 7.PUAPDAPULL DOWNPULL UP FROMUC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011APPLICATION INFORMATIONCross Conduction PreventionThe UC1625inserts delays to prevent cross conduction due to overlapping drive signals.However,some thought must always be given to cross conduction in output stage design because no amount of dead time can prevent fast slewing signals from coupling drive to a power device through a parasitic capacitance.The UC1625contains input latches that serve as noise blanking filters.These latches remain transparent through any phase of a motor rotation and latch immediately after an input transition is detected.They remain latched for two cycles of the PWM oscillator.At a PWM oscillator speed of 20kHz,this corresponds to 50μs to 100μs of blank time which limits maximum rotational speed to 100kRPM for a motor with six transitions per rotation or 50kRPM for a motor with 12transitions per rotation.This prevents noise generated in the first 50μs of a transition from propagating to the output transistors and causing cross-conduction or chatter.The UC1625also contains six flip flops corresponding to the six output drive signals.One of these flip flops is set every time that an output drive signal is turned on,and cleared two PWM oscillator cycles after that drive signal is turned off.The output of each flip flop is used to inhibit drive to the opposing output (Figure 8).In this way,it is impossible to turn on driver PUA and PDA at the same time.It is also impossible for one of these drivers to turn on without the other driver having been off for at least two PWM oscillator clocks.Figure 8.Cross Conduction PreventionUC1625-SPZHCS012A–SEPTEMBER2011–REVISED Power Stage DesignThe UC1625is useful in a wide variety of applications,including high-power in robotics and machinery.The power output stages used in such equipment can take a number of forms,according to the intended performance and purpose of the system.Figure9show four different power stages with the advantages and disadvantages of each.For high-frequency chopping,fast recovery circulating diodes are essential.Six are required to clamp the windings.These diodes should have a continuous current rating at least equal to the operating motor current, since diode conduction duty-cycle can be high.For low-voltage systems,Schottky diodes are preferred.In higher voltage systems,diodes such as Microsemi UHVP high voltage platinum rectifiers are recommended.In a pulse-by-pulse current control arrangement,current sensing is done by resistor R S,through which the transistor's currents are passed(Fig.A,B,and C).In these cases,R D is not needed.The low-side circulating diodes go to ground and the current sense terminals of the UC1625(I SENSE1and I SENSE2)are connected to R S through a differential RC filter.The input bias current of the current sense amplifier causes a common mode offset voltage to appear at both inputs,so for best accuracy,keep the filter resistors below2kΩand matched. The current that flows through R S is discontinuous because of chopping.It flows during the on time of the power stage and is zero during the off time.Consequently,the voltage across R S consists of a series of pulses, occurring at the PWM frequency,with a peak value indicative of the peak motor current.To sense average motor current instead of peak current,add another current sense resistor(R D in Fig.D)to measure current in the low-side circulating diodes,and operate in four quadrant mode(pin22high).The negative voltage across R D is corrected by the absolute value current sense amplifier.Within the limitations imposed by Table2,the circuit of Fig.B can also sense average current.TOMOTORFIGURE ATOMOTORFIGURE BTOMOTORFIGURE CTOMOTORFIGURE DUC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011Figure 9.Four Power Stage Designs Table 2.Imposed Limitations for Figure 9CURRENT SENSESAFE 2QUADRANT4QUADRANTPOWER REVERSEBRAKINGPulse-by-PulseAverage Figure A Yes No No N0Yes No Figure B Yes Yes No In 4-quad mode only Yes Yes Figure C Yes Yes Yes In 4-quad mode only Yes No Figure DYesYesYesIn 4-quad mode onlyYesYesUC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011For drives where speed is critical,P-channel MOSFETs can be driven by emitter followers as shown in Figure 10.Here,both the level shift NPN and the PNP must withstand high voltages.A zener diode is used to limit gate-source voltage on the MOSFET.A series gate resistor is not necessary,but always advisable to control overshoot and ringing.High-voltage optocouplers can quickly drive high-voltage MOSFETs if a boost supply of at least 10V greater than the motor supply is provided (See Figure 11)To protect the MOSFET,the boost supply should not be higher than 18V above the motor supply.For under 200-V 2-quadrant applications,a power NPN driven by a small P-Channel MOSFET performs well as a high-side driver as in Figure 12.A high voltage small-signal NPN is used as a level shift and a high voltage low-current MOSFET provides drive.Although the NPN does not saturate if used within its limitations,the base-emitter resistor on the NPN is still the speed-limiting component.Figure 13shows a power NPN Darlington drive technique using a clamp to prevent deep saturation.By limiting saturation of the power device,excessive base drive is minimized and turn-off time is kept fairly ck of base series resistance also adds to the speed of this approach.Figure 10.Fast High-Side P-Channel DriverFigure 11.Optocoupled N-Channel High-SideDriverUC1625-SP ZHCS012A–SEPTEMBER2011–REVISED SEPTEMBER2011Figure12.Power NPN High-Side Driver Figure13.Power NPN Low-Side DriverUC1625-SPZHCS012A–SEPTEMBER2011–REVISED Fast High-Side N-Channel Driver with Transformer IsolationA small pulse transformer can provide excellent isolation between the UC1625and a high-voltage N-Channel MOSFET while also coupling gate drive power.In this circuit(shown in Figure14),a UC3724is used as a transformer driver/encoder that duty-cycle modulates the transformer with a150-kHz pulse train.The UC3725 rectifies this pulse train for gate drive power,demodulates the signal,and drives the gate with over2-A peak current.Figure14.Fast High-Side N-Channel Driver with Transformer IsolationBoth the UC3724and the UC3725can operate up to500kHz if the pulse transformer is selected appropriately. To raise the operating frequency,either lower the timing resistor of the UC3724(1kΩmin),lower the timing capacitor of the UC3724(500pF min)or both.If there is significant capacitance between transformer primary and secondary,together with very high output slew rate,then it may be necessary to add clamp diodes from the transformer primary to12V and ground. General purpose small signal switching diodes such as1N4148are normally adequate.The UC3725also has provisions for MOSFET current limiting.See the UC3725data sheet for more information on implementing this.UC1625-SP ZHCS012A–SEPTEMBER2011–REVISED SEPTEMBER2011Computational Truth TableTable3shows the outputs of the gate drive and open collector outputs for given hall input codes and direction signals.Numbers at the top of the columns are pin numbers.These devices operate with position sensor encoding that has either one or two signals high at a time,never all low or all high.This coding is sometimes referred to as"120°Coding"because the coding is the same as coding with position sensors spaced120magnetic degrees about the rotor.In response to these position sense signals, only one low-side driver turns on(go high)and one high-side driver turns on(pull low)at any time.putational Truth TableINPUTS OUTPUTSDIR H1H2H3Low-Side High-Side68910121314161718 1001L H L L H H 1011L L H L H H 1010L L H H L H 1110H L L H L H 1100H L L H H L 1101L H L H H L 0101L L H H L H 0100L L H L H H 0110L H L L H H 0010L H L H H L 0011H L L H H L 0001H L L H L H X111L L L H H H X000L L L H H H。
无刷电动调速器用户手册说明书
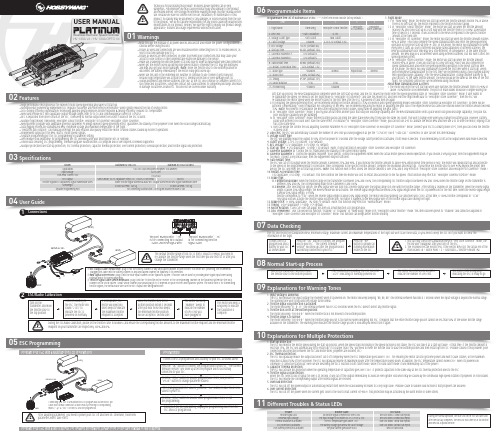
0103Specifications04User Guide05ESC Programming06Programmable Items07Data CheckingProgrammable Item List of Platinum 60A V4 ESC. (“*” in the form below indicate factory defaults. )USER MANUALHV 130A V4 / HV 130A OPTO V4Brushless Electronic Speed Controller1. Flight Mode:1.1 In “Fixed-wing” mode, the motor will start up when the throttle amount reaches 5% or above. There is no soft start-up, the motor responds to the throttle increase rapidly.1.2 In “Helicopter (Linear Throttle)” mode, the motor will start up when the throttle amount reaches 5% and it will start up in a soft way with the throttle (from 0 to 100%) acceleration time is fixed to 3.5 seconds. It will accelerate to the RPM corresponds to the specific throttle amount at the fixed rate.1.3 In “Helicopter (Elf Governor)” mode, the motor will start up when the throttle amount reaches 40% or above. And it will complete the speed standardization and enter the speed-governing operation in the preset start-up time (4~25s). In this mode, the motor will standardize its speed every time it starts up. Due to different discharge rates/capabilities of different batteries, the RPM you standardize each time may be a little different. In consequence, at the same throttle amount, the RPM may be a bit different when using different batteries, but this won’t affect the speed-governing effect.1.4 In “Helicopter (Store Governor)” mode, the motor will start up when the throttle amount reaches 40% or above. It will also start up in a very soft way. And it will also complete the speed standardization and enter the speed-governing operation in the preset start-up time. In this mode, the motor will only standardize its speed the first time when it starts up. When performing RPM standardization for the first time, we recommend using a fully-charged battery with good discharge capability. After the RPM standardization, change another battery to fly your aircraft. At the same throttle amount, the RPM should be the same as the RPM of the first flight. For consistent control feel, we recommend using this mode. About RPM Standardization & OthersI. The motor will enter the soft start-up when user switches the throttle amount from 0 to 40% or above (50%throttle is recommended). The pitch of main blades should be 0 degree during the• High performance microprocessor for excellent motor speed-governing and super soft start-up.• Microprocessor powered by independent DC regulator has better anti-interference performance, which greatly reduces the risk of losing control.• DEO (Driving Efficiency Optimization) Technology adopted greatly improves throttle response & driving efficiency, reduces ESC temperature.• New switch-mode BEC with adjustable output voltage ranges from 5V to 8V and continuous/peak current of 10A/25A.• BEC is separated from other circuits of the ESC, it will keep its normal output when the MOSFET board of the ESC is burnt. • Multiple flight modes: Fixed-wing, Helicopter (Linear Throttle), Helicopter (Elf Governor),Helicopter (Store Governor).• New governor program with adjustable governor parameter P/I brings excellent speed-governing effect, guarantees the stability of the propeller’s revs when the load changes dramatically. • Data logging records the standardized RPM, minimum voltage and maximum temperature of the flight.• "Restart in auto rotation" can manually interrupt the auto rotation and quickly restart the motor to avoid crashes caused by incorrect operations. • Independent output port for RPM (that is: motor speed) signals.• Separate programming port for ESC programming or parameter setting.• WIFI module (sold separately) for programming the ESC wirelessly with your smart phone (IOS or Android).• Online data checking, ESC programming, firmware upgrade (Multifunction LCD program box or WIFI Express is needed) supported.• Multiple protections like start-up protection, ESC thermal protection, capacitor thermal protection, over-current protection, overload protection, and throttle signal loss protection.Model Applications Input Voltage Cont./Peak Current (10s)BEC OutputThrottle Signal/BEC Output/RPM Signal Transmission WiresSize/WeightSeparate Programming PortPlatinum HV 130A V4White Throttle Signal Wire/Red & Black BEC Output Wires/Yellow RPM Signal Transmission WireFor connecting Multifunction LCD Program Box/WIFI module or fanSwitch-mode, 5V-8V Adjustable (Step:0.1V), 10A/25A Cont./Peak101x45.5x27mm / 168.5gProgrammingConnect the LCD program box and a battery to your ESC as shown above.successfully connected to your ESC.relates to the ESC.main blades =R ÷ Motor Poles ÷ 2 ÷ Gear Ratio × Throttle Amount (%).channel on the VBAR system. About which channel you should plug it in, it depends on your receiver and flybarless system. The White wire is for transmitting Program Your ESC with a WIFI Express: For detailed information, please refer to the user manual of WIFI Express.The ESC will record the standardized RPM, minimum voltage, maximum current and maximum temperatures of the flight but won’t save these data, so you need to keep the ESC on if you want to check theinformation of the flight.08Normal Start-up ProcessTurn on the transmitter, and then move the throttle stick to the bottom position.After connected to a battery, the ESC will emit “♪123” indicating it’s normally powered on.The motor will emit several beeps to indicate the number of LiPo cells.The motor emits a long beep indicating the ESC is ready to go.09Explanations for Warning Tones1. Input voltage is abnormal:The ESC will measure the input voltage the moment when it’s powered on. The motor will keep beeping “BB, BB, BB” (the interval between two BBs is 1 second) when the input voltage is beyond the normal range. The warning tone won’t stop until the voltage turns normal. 2. Throttle signal loss protection is activated:The motor will beep “B-, B-, B-” (the interval between two B-s is 2 seconds) when the ESC doesn’t detect any throttle signal. 3. Throttle stick is not at the bottom position:The motor will beep “B-B-B-B-B-” when the throttle stick is not moved to the bottom position.4. Throttle range is to narrow:The motor will beep “B-B-B-B-B-” when the throttle range you set is too narrow (when designing this ESC, it requires that the entire throttle range you set cannot be less than 50% of the whole throttle range available on the transmitter.) The warning tone indicates the throttle range you set is void and you need to set it again.10Explanations for Multiple Protections11Different Troubles & Status LEDs1. Start-up Protection:The ESC will monitor the motor speed during the start-up process. When the speed stops increasing or the speed increase is not stable, the ESC will take it as a start-up failure. At that time, if the throttle amount is less than 15%, the ESC will automatically try to restart up; if it is larger than 15%, you need to move the throttle stick to back the bottom position and then restart up the ESC. (Possible causes of this problem: poor connection/ disconnection between the ESC and motor wires, propellers are blocked, etc.)2. ESC Thermal Protection:The ESC will gradually reduce the output but won’t cut it off completely when the ESC temperature goes above 110℃. For ensuring the motor can still get some power and won’t cause crashes, so the maximum reduction is about 50% of the full power. The ESC will gradually resume its maximum power after the temperature lowers down. In addition, the ESC temperature cannot exceed 70℃ when it’s powered on. Otherwise, it cannot be started up. (Here we are describing the ESC’s reaction in soft cutoff mode, while if in hard cutoff mode; it will immediately cut off the power.) 3. Capacitor Thermal Protection:The ESC will activate this protection when the operating temperature of capacitors goes over 130℃. It protects capacitors in the same way as the ESC thermal protection does to the ESC .4. Throttle Signal Loss Protection:When the ESC detects loss of signal for over 0.25 second, it will cut off the output immediately to avoid an even greater loss which may be caused by the continuous high-speed rotation of propellers or rotor blades. The ESC will resume the corresponding output after normal signals are received. 5. Overload Protection:The ESC will cut off the power/output or automatically restart itself when the load suddenly increases to a very high value. (Possible cause to sudden load increase is that propellers are blocked.)6. Over-current Protection:The ESC will cut off the power when the current gets close to the short circuit current (of 400A). This protection may be activated by the burnt motor or some others.soft start-up process, the RPM standardization completes when the soft start-up ends, and the ESC makes the motor enter the speed-governing state. In “Helicopter (Store Governor)” mode, if user wants to re-standardize the speed, he needs to set the flight mode to “Helicopter (Elf Governor)” and save this mode first, and then reset the flight mode back to “Helicopter (Store Governor)”, then the ESC will re-standardize the motor speed when the motor rotates for the first time after the ESC is powered off and then on again.II. For ensuring the speed-governing effect, we recommend setting the throttle amount to 85% or below in both speed-governing modes (Helicopter (Store Governor) & Helicopter (Elf Governor)), so there will besufficient compensating room to maintain the consistency of the RPM. We recommend replacing the motor or adjusting the gear ratio if the expected RPM still cannot be reached when the throttle amount exceeds 85%. (Note: You need to re-standardize the RPM after replacing the motor, blades, body frame or adjusting the gear ratio.)III. In “Helicopter (Store Governor)” mode, if you fly your aircraft with another pack that has poor discharge capability after the RPM standardization (with a pack which has good discharge capability), the pack has poor discharge capability will get damaged.IV. In “Helicopter (Store Governor)” mode, different battery packs can bring the same stable RPM only if they have the same cell count. This won’t change even when you change the battery pack. However, battery packs with different cell count don’t have the same effect. For instance, in “Helicopter (Store Governor)” mode, you can not use a 4S to calibrate the motor RPM and then use a 6S to drive the motor, hoping it can run at the same RPM.V. User can decide the control feel via adjusting Governor Parameter P/I. In “Helicopter (Store Governor) or Helicopter (Elf Governor)” mode, connect your ESC to a smart phone or PC, then you can check the throttle vs speed chart.2. LiPo Cells: The ESC will automatically calculate the number of LiPo cells you have plugged in as per the “3.7V/Cell” rule if “Auto Calc.” is selected. Or user can set this item manually. 3. Voltage Cutoff Type:The ESC will gradually reduce the output to 50% of the full power in 3 seconds after the voltage cutoff protection is activated, if soft mode is selected . It will immediately cut off all the output when hard mode is selected. 4. Cutoff Voltage: 2.8V-3.8V (custom), 3.0V (default).5. BEC Voltage: 5-8V (adjustable), 0.1V (step), 6V (default).6. Start-up Time: 4-25s (adjustable), 1s (step), 15s (default). (Note: It only functions in Helicopter (Store Governor) and Helicopter (Elf Governor))7. Governor Parameter P: Control the ESC maintaining the stability of the current motor speed.8. Governor Parameter I: Control the dynamic response. To be specific, control the supplement extent when the actual motor speed is below expectation. If you choose a very big value, then the supplement may be too much. If select a very small value, then the supplement may not sufficient.9. Auto Restart Time:the ESC will cut off its output when the throttle amount is between 25% and 40%. If you increase the throttle amount to above 40% within preset time period (0-90s), the motor will rapidly start up and accelerate to the speed (in the programmed Restart Acceleration Time) corresponds to the specific throttle amount, complete the shutdown and restart up . If you move the throttle stick to over 40% beyond the preset time period, the ESC will enter the soft start-up process. (Note: This function won’t effect unless the throttle amount is over 25% and it only effects in “Helicopter (Store Governor) and Helicopter (Elf Governor)” mode.)10. Restart Acceleration Time:1-3s (adjustable), 0.5s (step), 1.5s (default). This item controls the time the motor will cost to restart and accelerate to the full speed. (This function only effects in “Helicopter Governor Elf/Store” mode) 11. Brake Type:11.1 Proportional Brake: when the throttle range on the transmitter is between 20% and 100%, the corresponding ESC throttle output is between 0% and 100%.When the throttle range on the transmitter is between 20% and 0%, the corresponding brake force is between 0 and 100%.11.2 Reverse: after selecting this option, the RPM signal wire will turn into a reverse signal wire (the signal range is in line with the throttle range). After setting a channel on the transmitter, when the reverse signal length is above 20% signal length, the Reverse mode will be activated. The reverse signal length must be below 20% signal length when the ESC is powered on for the first time. When the reverse signal length is below 20% signal length, 0-100%throttle corresponds to “CW”; when the reverse signal length is above 20% signal length, the motor will stop spinning CW (and then spin CCW); at this time, 0-100% throttle corresponds to “CCW”. Any signal loss will activate the throttle signal loss protection, no matter it happens to the RPM signal wire or the throttle signal cable during the flight.12. Brake Force: 0-100% (adjustable), 1% (step), 0 (default). (Note: this function only effects in “Normal Brake” mode.)13. Timing: 0-30° (adjustable), 1° (step), 15° (default).14. Motor Rotation: CW/CCW. User can adjust this item via a multifunction LCD program box.15. DEO (Freewheel): User can decide this function “Enabled” or “Disabled” in “Fixed Wing” mode or in “Helicopter (Linear Throttle)” mode. This item has been preset to “Enabled” and cannot be adjusted in “Helicopter (Store Governor) and Helicopter (Elf Governor)” mode. This function can brings better throttle linearity.During the normal operation, the Blue LED on the ESC will turn solid after the start-up completes. The Red LED will come on at full throttle and dies out at partial throttle.。
SD30M60AC 说明书

SD30M60AC说明书智能功率模块 600V/30A 3相全桥驱动描述SD30M60AC是高度集成、高可靠性的3相无刷直流电机驱动电路,主要应用于较低功率的变频驱动,如空调、洗碗机、工业缝纫机等。
其内置了6个低损耗的IGBT管和3个高速半桥高压栅极驱动电路。
SD30M60AC内部集成了欠压、短路、过温等各种电路,提供了优异的保护和宽泛的安全工作范围。
由于每一相都有一个独立的负直流端,其电流可以分别单独检测。
SD30M60AC采用了高绝缘、易导热的设计,提供了非常紧凑的封装体,使用非常方便,尤其适合要求紧凑安装的应用场合。
主要特点♦内置6个600V/30A的低损耗IGBT;♦内置高压栅极驱动电路;♦内置欠压保护和过温、过流保护;♦内置自举二极管;♦完全兼容3.3V和5V的MCU的接口,高电平有效;♦3个独立的负直流端用于变频器电流检测的应用;♦报警信号:对应于低侧欠压保护和短路保护;♦封装体采用DBC设计,热阻极低;♦绝缘级别:2500Vrms/min。
应用♦空调压缩机♦冰箱压缩机♦低功率变频器♦工业缝纫机产品规格分类产品名称封装形式打印名称材料包装SD30M60AC DIP-27H SD30M60AC 无铅料管内部框图极限参数参数符号参数范围单位逆变器部分加在PN之间的直流母线电压V PN450 V 加在PN之间的直流母线电压(浪涌)V PN(Surge)500 V 集电极和发射极之间的电压V CES600 V 单个IGBT集电极持续电流,T C=25°C I C30 A 单个IGBT集电极尖峰电流,T C=25°C,I CP60 A 脉冲宽度小于1毫秒每个模块最大集电极耗散功率,T C=25°C P C106 W 控制部分控制电源电压V CC20 V 高侧控制电压V BS20 V 输入信号电压V IN-0.3~17 V参数符号参数范围单位故障输出电源电压V FO-0.3~V CC+0.3 V故障输出电流I FO 5 mA V FO管脚的灌电流电流检测脚的输入电压V SC-0.3~V CC+0.3 V整体系统短路保护的限制电压点V PN(PROT)400 V V CC=V BS=13.5~16.5V, T J=150°C, 单次且小于2微秒模块外壳工作温度T C-40~125 °C 限制条件:-40°C≤T J≤150°C存储温度范围T STG-40~150 °C每个IGBT的结到外壳的热阻RθJC Q 1.2 °C/W 每个FRD的结到外壳的热阻RθJC F 1.9 °C/W 绝缘电压60赫兹,正弦,1分钟V ISO2500 V rms 连接管脚到散热器安装扭矩T 0.5~0.8 N.m 安装螺丝:-M3,推荐值0.62N.m自举二极管正向电流(T C=25°C)I F0.5 A自举二极管正向峰值电流(T C=25°C,1ms脉冲宽度)I FP 2.0 A 推荐工作条件电气特性参数(除非特别说明,T amb =25°C ,V CC =V BS =15V)逆变器部分(a)开启过程(b)关闭过程图1. 开关时间定义控制部分备注1: 故障输出脉宽t FO 取决于C FOD ,C FO =18.3×10-6×t FO [F] 备注2: 短路保护只对低侧有效自举二极管部分(除非特别说明,适用于每个自举二极管)0.00.10.20.30.40.50.60.70.80.91.00123456789101112131415内置自举二极管 V F -I F 特性I F (A )V F (V)注:电阻特性:等效电阻:~ 15Ω。
本公司产品使用说明书:工业缝纫机

使用说明书User Guide工业缝纫机Industrial sewing machine感谢您购买本公司的产品。
为了您的使用安全,请您在使用之前一定仔细阅读本使用说明书。
Thank you for purchasing our products.For your use safety,please must read the instruction manual before use.全自动一体电控操作手册安全事项:•使用本产品前,请先阅读本《操作手册》及所搭配的缝制机械说明书。
•必须由接受过专业培训的人员来安装调试或操作。
•本产品仅适用于指定范围的缝制机械,请勿移做他用。
•请尽量远离高频高辐射设备,以免干扰本控制器误动作。
•对控制箱进行安装维护时,请先关闭电源并拔掉插头。
•请确保用电及设备可靠接地,以防止干扰和漏电事故。
•所有维修用零件须由本公司提供或认可,方可使用。
•在进行控制箱的维修保养前,必须先关闭电源并拔掉插头,并由专业人员进行操作。
1.产品说明1.1产品规格产品型号全自动工作电压AC220V 20%50/60HZ 额定功率550W电机扭矩≤3N·M1.2接口插头说明①电机端口②电机编码器端口③脚踏板端口④机头灯组件端口⑤电磁铁端口Qs/Ss-T1.3接口定义※请遵照接口定义及端子颜色相连接,如插不进去,请检查插座与针是否变形。
2.操作面板使用说明2.1面板各按键功能说明15V 地23脚踏信号4+5V1+30V 8剪线2+30V 9扫线330VB 10压脚4+30V 11夹线器5+30V 12吸风630VB 13倒缝730VB14密缝1+5VB2补针信号3倒缝信号430V 地530V 地630V 地12341234561234568910111213714序号图标功能按键功能描述1参数进入及返回键按著此键两秒进入参数界面。
参数界面长按退出当前界面,返回工作模式界面。
2缝纫模式选择点按可选择自由缝、定寸缝、多段缝、连续回缝四个缝制模式。
YSC-8330工业缝纫机伺服控制器使用说明书

序号 F9,显示待机的总时间,如上图所示,待机总时间为 12.5 天。 8.10 运行总时间统计功能
序号 FA,显示运行的总时间,如上图所示,运行总时间为 118.3 天。 8.11 使用效率统计功能
序号 FB,显示截至当前的使用效率,如下图所示,效率为 90.4%。
9. 时钟界面
在特殊功能界面下通过 键可以切换到时钟界面,此时时钟界面指示灯 亮(如下图所示),再通过 键可以切换至缝型界面。
锁器,捏住接插件进行插拔。请勿摇动接插件、强拉电缆线。
4
2. 安装与调整
2.1 控制箱的安装
2.2 磁式调速器
用 4 个 M5 的 木螺钉把挂架 固定在台板 上,挂架方向 如图所示(支 架带斜倒角的 一端面向台板 正面)。
把控制箱后面 的凹槽对准挂 架的斜倒角, 从台板正面推 入到底。
2.3 “-D”型调速器安装板 2.4 机头识别器
3
13
13
1. 注意事项
13
YSC-8330 工业缝纫机伺服控制器专用于工业缝纫机系统,请在专业人员
13
的指导下使用,以免发生意外。
13
YSC-8330 型号后的“-D”后缀指示出厂适配于直接驱动型机头,“-B”后
13
缀指示出厂适配于皮带驱动型机头。二者通用,可以实现互换,详细信息请仔
13
细阅读本使用说明。
进入 D 类和 O 类参数,必须在开机时按住 键,显示“DO EN”后方可。
7.5 机头识别器的功能 机头识别器是用于识别机头类型的电子元件,电控系统通过识别器可以很
好的与机头功能相对应,从而实现电控系统种类的精简。
7.6 倒缝针迹的调整 1)倒缝电磁铁吸合时间的调整 对于起始回缝、终止回缝以及折返缝动作,如果在由正缝转入倒缝时 出现倒回缝针迹不一致的情况,可参考下面进行调整。
无刷动力系统说明书

感谢您购买本产品!无刷动力系统功率强大,错误的使用可能造成人身伤害和设备损坏。
我们强烈建议您在使开关机及鸣音说明2· 电调与相关连接部件连接前,请确保所有电线和连接部件绝缘良好,短路会毁坏电调。
· 请务必仔细连接好各部件,若连接不良,您可能不能正常控制赛车,或出现设备损坏等其他不可预知的情况。
· 使用此电调前,请认真查看各动力设备以及车架说明书,确保动力搭配合理,避免因错误的动力搭配导致电机超载,最终损坏电调。
· 高速运行中,因车子轮胎会“膨”到极致,故而请勿将车子腾空然后扣全油门,否则,轮胎运行故障会引起严重伤害。
· 勿使电调外部温度超过90℃/194℉,高温将会毁坏电调并且可能导致电机损坏。
· 使用完毕后,切记断开电池与电调的连接。
只要接着电池,即使开关未开电调也会一直消耗电流,长时间连接会导致电池最终完全放电;进而导致电池或电调出现故障;我们不对因此而造成的任何损害负责。
开关机说明:关机状态下短按ON/OFF键开机;开机状态下长按ON/OFF键关机。
开机鸣音说明:在正常情况下开机, 电机会发出几声“哔”鸣音表示锂电节数。
例如:“哔哔-”表示2节锂电,“哔哔哔-”表示3节锂电。
最后鸣叫一声长音“哔—”表示自检完成。
备注:电机鸣叫的同时,电调灯同步闪烁。
编程项目说明3下表中黑底白字的选项为可编程项目的默认值。
编程方法402注意事项1. 利用LED参数设定卡进行参数设置:VALUE”按键即可快速选择参数项和参数值,然后按“OK”键保存参数。
2. 利用LCD G2设定盒进行参数设置:此电调支持使用多功能LCD G2设定盒进行参数设置,且支持通过LCD G2设定盒连接到电脑进行参数设置和固件升级。
用一条两端带JR公头的排线将电调与LCD G2设定盒连接起来,然后给电调上电,LCD G2设定盒将显示出开机界面,按LCD G2设定盒上任意按键可进入到参数界面,使用“ITEM”和“VALUE”按键即可更改参数设定,按“OK(R/P)”按键保存参数设置。
MMT 无刷控制器使用说明书

开关
极对数
1
2
4
8
S5 S6 MIN MAX MIN
MAX MIN
MAX
MIN
MAX
ON ON 500 6000 250 ON OFF 500 25000 250 OFF ON 500 60000 250
3000 125 12500 125 30000 125
1500
67
6250
67
15000 67
3、电源输入连接: 警告
该驱动器电源输入端 没有电源极性反接保护电路。请必须确认 POS(+) 接到驱动器的“IN+”端, NEG(-)接到驱动器的“IN-”端。 6.3.1、电源(电瓶)在接入驱动器前请确认电源(电瓶)的“正”“负”极
性,必须对应驱动器直流电源输入的“正”“负”极性。 6.3.2、参考 P5 页表 1 选择合适的导线连接。 6.3.3、确认电源(电瓶)的电压是否能满足驱动器的工作电压要求,以及电
1、驱动器的电源输入端与电源(电瓶)之间,请必须加装一只快速熔断保险 和电源应急总开关,以防必要时紧急断电。
(注:快速保险及电源总开关的选择:电源总开关的额定电流值要大于或等 于电机额定电流的 150-200%)。 注:请确定电机电压的额定值与驱动器的输出电压匹配。
2、电机的连接:见图 3
图3
6
济南科亚电子科技有限公司
MMT -
24/48DPW05BL
无刷控制器使用说明书
济南科亚电子科技有限公司
济南科亚电子科技有限公司
在使用本产品前请您详细阅读本使用说明书。 由于不遵守该使用及安装说明书中规定的注意事项,所引起的任何故障和 损失均不在厂家的保修范围内,厂家将不承担任何相关责任。请妥善保管 好文件,如有相关疑问,请与厂家联系。 安全注意事项 ·请专业技术人员进行安装、连接、调试该设备。 ·在带电情况下不能安装、移除或更换设备线路。 ·请务必在本产品的电源输入端与电源(电瓶)之间加装必要的保护装置,以免 造成危险事故或致命伤害;需要加装:过流保护器、保险、紧急开关。 ·请做好本产品与大地、设备之间的隔离及绝缘保护。 ·如确实需要带电调试本产品, 请选用绝缘良好的非金属专用螺丝刀或专用调 试工具。 ·本产品需要安装在通风条件良好的环境中。 ·本产品不能直接应用在高湿、粉尘、腐蚀性气体、强烈震动的非正常环境下。
WR57x 系列电控说明书

3.2.2拨码操作盒速度设置说明:拨码操作盒插头与踏板共用一个接口, 需要重新设置速度时,先关机等完全 断电后,再拿掉踏板插头。
然后插上 拨码操作盒,开机,看到机箱led 灯慢 闪2次(表示设置完毕),然后再完全 断电后,重新插上踏板插头,即可正常 使用。
4.故障分类和检测说明没有故障时,常亮LED 红灯。
故障显示利用LED 红灯眨眼的方法进行,仅仅有LED 红灯闪烁,连续的短时间的LED 红灯 闪烁次数n 即为故障代码E n 。
LED 红灯慢闪1次后,连续的短时间的LED 红灯闪烁次数n 即为故障代码E(10+n)。
故障显示 故障内容 检查项目、处理快闪1次表示E1 硬件过流 接地是否良好 快闪2次表示E2 软件过流接地是否良好快闪3次表示E3 停机或运行时过电压 系统进线电压是否过高 快闪4次表示E4 停机或运行时欠电压 系统进线电压是否过低 快闪6次表示E6 停针信号故障 检查停针插头是否松动 快闪7次表示E7 电机HALL 信号故障 电机插头是否接触良好快闪8次表示E8电机堵转故障检查电机线是否插好,负载是否过大 快闪9次表示E9 超速故障(超过设定机型的最高转速报错)检查电机接线是否正确慢闪1次快闪1次表示E11 厂家保留厂家处理慢闪1次快闪3次表示E13 EEPROM 初始化错误厂家处理 慢闪1次快闪4次表示E14EEPROM 读写错误厂家处理 慢闪1次快闪5次表示E15踏板零位检测超限踏板零位超过了设定范围慢闪1次快闪6次表示E16 接入踏板故障自动测试模式时,接入踏板会报此故障慢闪两次表示(E20)程序烧写成功关机断电后,拔除操作盒注:使用说明书会在网上及时更新发布,请关注网址:-4-3.2拨码操作盒在操作盒上有一个四位的拨码开关,四位的拨码开关用来设置电机的转速,现说明如下: 3.2.1 4位拨码开关说明1)I 类调速:操作盒分15档,每250rpm 为1档 0000:500 rpm 0001:750 rpm 0010:1000rpm 0011:1250rpm 0100:1500rpm 0101:1750rpm 0110:2000rpm 0111:2250rpm 1000:2500rpm 1001:2750rpm 1010:3000rpm1011:3250rpm1100:3500rpm1101:3750rpm1110:4000rpm举例如下:0000代表500rpm 0001代表750rpm 0010代表1000rpm 0011代表1250rpm 2)II 类调速:操作盒分15档,每500rpm 为1档 0000:1000 rpm 0001:1500 rpm 0010:2000rpm 0011:2500rpm 0100:3000rpm 0101:3500rpm 0110:4000rpm 0111:4500rpm 1000:5000rpm1001:5500rpm1010:6000rpm1011:6500rpm1100:7000rpm 1101:7500rpm 1110:8000rpm举例如下:0000代表1000rpm 0001代表1500rpm 0010代表2000rpm 0011代表2500rpm 注意:系统根据机型设定,自动限定缝纫最高速度。
无刷驱动器使用说明书

无刷电机驱动器
使用手册
3KDVH
h 㾮子⺇ⷒ
ֺ՚ ாऩ
ௌؔऄԹ <*) କऄࡶ ' ௌؔԅࣤ = લବڔސ લବਸ֠ 863 تؾSS
*(2EEEE8
< ࠥ૿ܧҵ澝 6=3 ૿ҵ澝ӄୂગؔ࠼ךବ ͬ
RJ12 座引脚图
端子引脚号 1 2 3 4 5 6 引脚名 NC TXD VCC RXD GND NC 定义说明 空 MCU 数据发送端 5V 电源 MCU 数据接收端 地 空
2.5
典型接线图
-4-
3 控制端口功能说明
3.1 模拟量/PWM 输入端子 SV
SV 用于模拟量输入或者 PWM 输入端,当在 BLDC_2 软件的输入设置为“模拟输入”或者 “PWM 输入”方式时,该端口输入的量作为速度的给定值,下面是接线图及说明。 3.1.1 可调电阻调节模拟输入
端子引脚号 1 2 3 4 5 引脚名 GND VDC W V U 定义说明 电源输入负端 电源输入正端 DC18-50V 电机相线 W 电机相线 V 电机相线 U
2.4
通信接口 驱动器采用串行通信方式与计算机相连。接口为 RS232 电平。必须通过厂 商提供的专用电缆才能与计算机相连。物理接口采用 RJ12—6PIN 的电话插座, 其引脚排列如下图,引脚号对应名称在下表中描述。
频率设定在 2KHz
3.2 FR 正反转方向控制端子 FR 端子用于控制电机转动方向。FR 端子不同电平切换时会根据加减速时间设 定值,先减速到 0,然后切换方向再从 0 速加度到给定值。如果电机拖动的负载惯量
-6-
大,应适当加大加减速时间,否在方向切换时有过流或者电压过高的情况。 3.3 EN 电机使能端子 EN 脚与 GND 的接通与断开可控制电机的运行与停止,只有在 EN 脚与 GND 连 接时其它的操作才能被允许,若断开则电机处于自由状态,其它的操作被禁能。 当电机出现故障时,可以先断开 EN 引脚,然后再接通来清除故障。 3.4 BK 刹车控制端子 当 BK 脚与 GND 脚的断开时, 驱动器将三根相线短路,电机处于制动状态。当 BK 脚与 GND 脚的接通时, 电机脱离制动状态。 如果电机处于高速或者负载惯量 比较大时,刹车对电气和机械装置产生冲击,损害大。除安全紧急制动外,应避 免此类制动行为。为了减小动作时间,尽量把速度减少到比较安全范围再进行刹 车。 3.5 X1,X2,X3 多段速控制端子 在配置软件中可设置多段速输入模式 多段速模式有两种,分别为模式 1 及模式 2,模式 1 为译码方式,模式 2 为位选 方式。 3.5.1 多段速模式 1 X1,X2,X3 与 GND 的断开或导通可以组合成 8 种不同的状态对应 8 段不同的 速度。通过不同状态的切换实现不同的转速,不同转速过渡按设定的加减速时间 进行。
JUKI型号工业缝纫机说明书

48”42”12”5.5”24.5”22”Industrial presser feet, throat plates and gauges can be used.For regular sewing.For regular free motion and ruler works.Creates even 1/4 inch seams for perfect piecing.Part No. 40171426Part No. A9840D250A0Part No. A9843D25AA0Part No. A9841D25AA0Part No. A9842D250A0JUKI CORPORATION holds the rights to change technical specifications without prior notice. 1710(F)Hinged Zipper FootInvisible Zipper FootSmooth FootCompensating Foot(Right 1.5mm)Regular Hinged Foot (1/4")Optional AccessoriesStandard Presser FootQuilting(Ruler) Foot1/4" Presser FootStandard Accessory PartsNew for QuiltingStraight stitching or free motion sewing in 12" × 5.5" areaNew for QuiltingStraight stitching or free motion sewing in 12" × 5.5" areaMain Features13.5mmBAHand stitchBack stitch Triple stitch12”5.5”Simply filling the oil tank through the filleropening at the front of the sewing machineensures that the hook is automaticallylubricated.From the operation panel, you can easily select theappropriate feed operation for the item being sewn.Light aluminum bobbins reduce variations inthe bobbin thread tension due to the amountof bobbin thread remaining.Two easily accessible switches (A and B)can be assigned frequently used operations,such as moving the needle up/down (inchsewing), and raising the presser foot.The operation pedal, integrated into the table, provides a reliably large stepping area.High-speed sewing, low-speed sewing, stopping sewing, raising the presser foot, and threadtrimming can easily be performed depending on how much you depress the pedal.The double-edge driven rotary knife systemcan leave 3 mm or less of thread after threadtrimming, eliminating the need for threadpicking.Up to 20 sewing designs consisting of yourfavorite combination of stitch lengths can beregistered. Even stitching similar to handstitching is possible.By inputting a negative value for the presser footpressure, fabric can be sewn with the presser footfloating at a height of 0 to 4 mm. This helps whensewing thick seams and reduces uneven feedingwhen quilting.You can set the machine toautomatically sew reverse stitching atthe beginning and at the end of sewing.You can also specify the sewing patternand the number of stitches to be sewn.With the count changing by one for every 10 stitchessewn, the counter (amount of bobbin thread remaining)can be used as a guide for when to replace the bobbinthread. The counter can count up or down to a presetvalue.When the presser foot is raised, the feed dog is automaticallylowered. In addition, the presser foot can be raised to a heightof up to 13.5 mm, allowing thick fabrics to easily be insertedand removed.The stitch length, thread tension, presser foot pressure,feed operation, etc., are all digitally controlled. Settingscan easily be confirmed and specified from this largepanel.The machine is equipped with a button for switchingbetween the frequently used straight stitch mode andthe free motion mode. Switch to the appropriate modewith one touch of a button.Using an easily accessible switch, thebrightness can be adjusted to one of fivelevels.New for QuiltingExperience the quiet,durable and comfortable operation of JUKIindustrial sewing machines, the globalmarket share leader.A sewing speed of 2,500 spm allows you towork even faster.Seams are finished beautifully and securely.Low speed High speed Presser foot up Thread trimmingFour feed operation typesMaintenance-free Industrial machine qualityAluminum bobbinsCustom switches Clean stitching at beginning of sewingMicro-lifter function (float function)Custom pitchSettings for automaticreverse feed stitchingEasily insert and remove thick fabricsAutomatic thread trimming(3 mm of thread remaining)Bobbin thread counterOne-touch switching to free motion mode Adjustable brightness of LED lightUseful operation pedal4.3" color LCD operation panel。
无刷直流电机驱动器说明手册

无刷驱动器D B L S-02一概述:本控制驱动器为闭环速度型控制器,采用最近型IGBT和MOS功率器,利用直流无刷电机的霍尔信号进行倍频后进行闭环速度控制,控制环节设有PID速度调节器,系统控制稳定可靠,尤其是在低速下总能达到最大转矩,速度控制范围150~10000rpm。
二产品特征:1、PID速度、电流双环调节器2、高性能低价格3、20KHZ 斩波频率4、电气刹车功能,使电机反应迅速5、过载倍数大于2,在低速下转矩总能达到最大6、具有过压、欠压、过流、过温、霍尔信号非法等故障报警功能三电气指标标准输入电压:24VDC~48VDC,最大电压不超过60VDC。
最大输入过载保护电流:15A、30A两款连续输出电流:15A加速时间常数出厂值:0.2秒其他可定制四端子接口说明:1、电源输入端:GND:信号地F/R:正、反转控制,接GND反转,不接正转,正反转切换时,应先关断ENEN:使能控制:EN接地,电机转(联机状态),EN不接,电机不转(脱机状态)BK:刹车控制:当不接地正常工作,当接地时,电机电气刹车,当负载惯量较大时,应采用脉宽信号方式,通过调整脉宽幅值来控制刹车效果。
SV ADJ:外部速度衰减:可以衰减从0~100%,当外部速度指令接6.25V时,通过该电位器可以调速试机PG:电机速度脉冲输出:当极对数为P时,每转输出6P个脉冲(OC门输入)ALM:报警输出:当电路处于报警状态时,输出低电平(OC门输出)+5V:调速电压输出,可用电位器在SV和GND形成连续可调内置电位器:调节电机速度增益,可以从0~100%范围内调速。
五驱动器与无刷电机接线图六机械安装:七功能与使用调速方式本驱动器提供以下两种调速方式用户可任选一种:内部电位器调速:逆时针旋转驱动器面板上的电位器电机转速减小,顺时针则转速增大。
用户使用外部输入调速时必须将电位器设于最小状态。
外部输入调速将外接电位器的两个固定端分别接于驱动器的GND和+5v一端,将调节端接于SV端即可使用外接电位器(10K~50K)调速,也可以通过其它的控制单元(如PLC、单片机等)输入模拟电压到SV端实现调速(相对于GND),SV端口的接受范围为DCOV~+5V,对应电机转速为0~额定转速。
无刷电机控制板

适用范围:有感无刷电机
特点应用
■快速启动■无刷电机控制■闭环双控制■无刷电钻
■输入反接保护
1.参数说明
2.显示说明:
异常LED指示说明:
注1:● -> 亮○ -> 灭⊙ ->闪
3.操作说明
1.调速等级调整:开关松开状态下,单击按键;(开关按下状态,单击按键无效)
2.电机控制运转开启/关闭:开关按下,电机运转开启;开关松开,电机运转关闭;
3.正反转调整:开关松开状态,拨动”正反转方向键”,实现下次电机运转的控制方向;
4. 反转自停功能的开启与关闭:任何调速等级、电机反转、最高档位状态下,长按按键
3S,进行该功能开启/关闭的切换;
4.自动断电功能:
电钻在5min内,无任何的操作情况下,会自动断电,以实现低耗电功能;
(特别说明:在电钻长时间反复使用过程中,会出现开关自身大电流通路无法切断现象;
为了实现低耗电,延长电池使用寿命和电钻工作时间,主控板会进入休眠模
式;这样,在用户使用时,需要重装一下电池或按一下开关,唤醒控制板工
作;)
正方科技有限公司工程部。
工业缝纫机无刷电机控制板说明书
工业缝纫机无刷直流电机控制板使用说明工业缝纫机无刷直流电机控制板包括主控板,显示板和调速板。
调速板输出调速信号给主控板,实施启动,刹车,调速等功能。
显示板可以调节最高运行转速,运行方向以及运行模式和显示当前转速等功能。
主控板是整个系统的核心,具备驱动无刷直流电机,保护等功能。
参数:输入电源为220V单相电源,最大输出功率400W。
工业缝纫机无刷直流电机控制系统的特点:1.比同功率离合器电机省电60%,高效节能,即开即停,不存在空转耗能的现象。
2.利用数控调速系统驱动无刷电机,产品能直接带动缝制设备,调速性能好,方便灵敏,性能稳定,安全可靠。
3.免维护,寿命长,采用无碳刷设计,长期使用无需更换任何内部部件。
4.相比离合器电机,有低速高转矩的优点。
5.噪音低,发热少。
运行期间对外界其他电子设备的干扰少。
6.电机转速可调范围在1600RPM到4200RPM之间,以200转的间隔循环进行调整。
7.结构简单,体积小,重量轻,是同功率离合器电机重量的二分之一。
显示板显示板包括速度设置键,工作模式键,电机转向键和一个双位数码管。
背面包括一个四芯接口与主控板相连。
速度设置键用于更改电机最高转速。
电机的最高转速可在1600RPM与4200RPM之间调整。
每按下该键一次,转速增加200RPM,当转速达到4200RPM时,按下该键,速度回到1600RPM,设置时数码管显示电机转速的前2位数字,如,4200RPM,显示42,显示时间为5秒钟。
工作模式键用于选择电机的工作模式。
有P1,P2两种模式,P1适用于制衣业,P2适用于制鞋,制包等行业。
设置时数码管显示P1或者P2,显示时间5秒钟。
电机转向键长按该键一次(按键时间大于5秒钟),可更改电机转向。
数码管会顺时钟或者逆时钟旋转显示,以指示电机运行方向。
数码管数码管一共有两位,平时以顺时钟或者逆时钟方向显示以指示电机转动方向,当按下转速键后,显示当前设置转速,当按下模式键后,显示当前运行模式P1或者P2。
SM系列无刷电机说明书

SM Series Servo Motors Brushless servo motors featuring high performance slotless designThis design eliminates all detent torque in the motor, allowing the SM Series motors to provide extremely smooth motion, especially at low speeds. The slotless design also creates a higher rotor inertia, which is ideal for applications involving high inertial loads (such as lead screws and belt drives).Features• NEMA size 16 and 23• 0.8 to 11.3 lb-in continuous torque• Brushless construction • Slotless design providesnegligible detent torque, reduced torque ripple and high inertia • High-performance neodymium magnets• Thermostat protected • TENV housing • IP65 option• Feedback options – Encoder/Hall effect – Resolver• Connectorization choices • Special winding availability• Custom modifications available • Two-year warranty • CAD models available •CE CompliantContact Information:Parker Hannifin CorporationHydraulic Pump and Power Systems Div.14249 Industrial Pkwy. Marysville, OH 43040 USA Tel: (937) 644-3915 Fax: (937) 642-3738Web: /hpsSM Series Servo MotorsHigh-Performance Slotless DesignThe SM Series motors also feature a rugged anodized aluminum body and connector housing. An IP65 rating can be obtained on motors with PS or MS connectors and an optional shaft seal. All SM motors are CE (LVD) compliant.The SM Series brushless servo motors feature a slotless stator design.1@ 25°C ambient, 125°C winding temperature, motor connected to a 10” x 10” x 1/4” aluminum mounting plate. @ 40°C ambient derate phase currents and torques by 12%.2Operating at maximum bus voltage. Higher speed operation possible as custom.3Measured line-to-line, ±10%.4Value is measured rms of sine wave.5±30%, line-to-line, inductance bridge measurement @1Khz.6Initial winding temperature must be 60°C or less before peak current is applied.8A rms current in any phase for a sinusoidally commutated motor.9Total motor torque per A rms measured in any phase, ±10%.Note: These specifications are based on theoretical motor performance and are not specific to any amplifier.SM Series NEMA Size 16SM Series NEMA Size 16 NEMA Size 16 Performance Curves@ 40°C ambient derate phase currents and torques by 12%.2 Operating at max bus voltage. Higher speed operation possible as custom.3 Measured line-to-line, ±10%.4 Value is measured rms of sine wave.5 ±30%, line-to-line, inductance bridge measurement @1Khz.6 Initial winding temperature must be 60°C or less before peak current is applied.8 A rms current in any phase for a sinusoidally commutated motor.9 Total motor torque per A rms measured in any phase, ±10%.Note: These specifications are based on theoretical motor performance and are not specific to any amplifier.NEMA Size 23 Performance CurvesØ0.125 (3.18) Thru (4X)SM Series DimensionsNEMA Size 16 — Inches (mm)Ø0.218 (5.54) Thru (4X)NEMA Size 23 — Inches (mm)SM Series DimensionsSM Series - Recommended DrivesRecommended Parker Drives for SM Series Motor(AC powered)Recommended Parker Drives for SM Series Motor(DC powered)SM Series - Cable OptionsP-1A1P power cable is for use with P series drives and has extended ground wire to reach drive ground lug (heatsink).Brake leads included in either cable and not used when motor does not have a brake.Parker motors include brake rectifier preventing miswiring of the brake leads and either brake wire (red/blue) can be used as+ or -(with Parker drive-compatible terminations)Feedback Cables (with pin connector one end and flying leads)PS – Parker Standard (-xPSx) Pin ConnectionsPS Incremental Encoder/Hall (J and L) Pin ConnectionsPS Power & Brake Pin ConnectionsPowerThe PS connector option for the SM motors features high-quality Hypertac - Interconnectron circular connectors mounted to the motor body.Mating cables are specified and ordered separately. The PS option joins the motor phase wires and brake leadsIP65.NOTE: For customers preferring to build their own mating cables, a PS connector kit (Part #: PS-CONN-KIT), is available. The kit contains a mating PS power connector, PS feedback connector and connector pins, allowing customers to build cables to their own specification. Special tools are not included in the kit.NOTE: Brake will operate regardless of polarity of connectionLC – Low Cost (-xLCx) Pin ConnectionsLC Incremental Encoder/Hall (R) PinLC Resolver (R) Pin ConnectionsThe LC connector option for the SM motors features a high-quality and low cost molded connector. This option uses the very common Amp, or Tyco brand of connectors on the ends of 8” motor and feedback cables. These connectors are usually available from most electrical supply houses.Feedback2Power PowerBrakeThe LC connector option is available on all SM size 16 and 23 stack length motors. The feedback type selections that are available with the LC option are J (incremental encoder) and R (resolver) feedback options.The LC connections support the brake option for SM motors. When the brake option is ordered, the motor ships with three individual connectors: One for feedback, one for power and the last for the brake. Without a brake, the motor only comes with the feedback and power connectors.Feedback Connector Tyco 172171-1Mating Connector Tyco 172163-1Mating Pin (F) Connector Tyco 170362-1Tyco 172167-1Tyco 172159-1Tyco 170362-1 Tyco 170362-1Wiring Connections for:FL – Flying Leads with Enclosed Feedback (-xFLx) FO – Flying Leads with Exposed Feedback (-xFOx)FL and FO Cable MotorPower, Motor Feedback andFO/FL Flying LeadsThe FO/FL cable option for the SM motors features flying leads for both feedback and power connections. The only variable is whether or not the feedback device is fully enclosed (FL) or fully exposed (FO).These options are for OEM customers that wish to reduce cost as much as possible and fully integrate their own cable solutions.10 - 10’ hard wired cableThe “10” cable option for the SMhard wired into the rear of the motor. The cables have full strain relief and completely enclosed feedback. While custom lengths are available, it is not recommended to exceed 10 feet between motor and drive.NOTE: Brake will operate regardless of polarity of connection10’ Cable Motor Power, Motor Feedback and Brake (J) Wiring ConnectionsMS – Military Style (-xMSx) Pin ConnectionsMS Incremental Encoder/Hall and Brake (E and L) Pin ConnectionsMS Power Pin ConnectionsAmphenol CONN PT06E-14-12P(023) Feedback connector part number:Amphenol CONN PT02E-14-18S(023)MS Resolver and Brake (R) Pin ConnectionsPowerFeedbackThe “MS” connection option for the SM Series motors provides quick disconnect, bayonet style connectors attached to the motor body. Mating cables are specified and ordered separately.With the “MS” connection option, the motor phase wires are in one connector, and the hall, encoder, temperature switch, and brake wires are in the other connector. This option works well when using an amplifier with a built-in controller, or when all cables enter into a cabinet or enclosure and then are wired into a terminal strip.When specifying the “R” (resolver) feedback option, the motor phase wires reside in one connector, the resolver signal, temperature switch, and brake wires in the other.The “GS” connection option for the SM Series motors provides quickdisconnect, bayonet style connectors attached to the motor body. Mating cables are specified and ordered separately. Wiring for the “GS”connection option for SM motors is similar to the “MS” option, except thetemperature switch leads have been moved to the feedback connector. This connection option should be selected when operating the SM motors with the Gemini family of amplifiers.GS – Gemini Amp Series Connection (-xGSx)GS Motor Wiring ConnectionsGS Encoder/Hall Feedback Wiring ConnectionsPowerFeedbackFeedback OptionsResolver SpecificationsHall-Effect SpecificationsEncoder SpecificationsR2R1S3S1S1-S3 R1-R2E S2-S4 = KE R1-R2 SINØPhase B-APhase A-CClockwise rotation as viewed from front shaft.Phase C-BHall #1Hall #2Hall #3Resolver SchematicCommutation ChartSM Series OptionsFill in an order code from each of the numbered fields to create a complete model order code.SeriesSMBrushless Servo MotorsFrame (Magnet Length)161Size 16 frame, 1 stack magnet 162Size 16 frame, 2 stack magnet 231Size 23 frame, 1 stack magnet 232Size 23 frame, 2 stack magnet 233Size 23 frame, 3 stack magnetWindingA 16 or 23B16 or 23FeedbackE 1000 ppr encoder*L 5000 line encoder*RResolver***Includes Hall-effect**Not available on any size 16 FrameShaft OptionsN Normal F FlatKKeyway**Not available on size 16 motorsConnectionPS Parker standard connectors, all feedback optionsLCLow cost connectors 1010 ft. (3m) cable*FL Flying leads (housed feedback)FO Flying leads (exposed feedback)MS Military styleGSGemini amp series ***Cable is hard-wired**See amplifier sections for specific motor/amplifier compatibilityOptionsN NoneB 24 V failsafe spring brake*BV 24V failsafe spring Brake with IP 65 shaft seal VIP 65 shaft seal***Available on 23 frame with any connector option except FO, not available on 16 frame.**Available with PS, LC, MS or GS connectors only, not available on size 16 frame.SM Series Ordering InformationParker Hannifin CorporationElectromechanical Product Sales OfficesAustraliaParker Hannifin (Australia) Pty Ltd.9 Carrington Road Castle Hill NSW 2154AustraliaTel: +61 (0) 2 9634-7777 Fax: +61 (0) 2 9634 3749BrazilParker Hannifin Ind. Com Ltda.Av. Lucas Nogueira Garcez 2181Esperança12325-900 Jacareí, SP Tel: 12 3954 5100Fax: 12 3954 5262Email: a ***************************CanadaParker Hannifin (Canada) Inc.160 Chisholm DrMilton, Ontario L9T 3G9 Tel: 905-693-3000 Fax: 905-876-1958Email:****************************ChinaParker Hannifin Motion & Control (Shanghai) Co., Ltd280 Yunqiao Rd. Jin Qiao Export Processing ZoneShanghai 201206, China Tel: (86-21) 50312525Fax: (86-21) 64459717FranceParker SSD Parvex 8 avenue du Lac B.P . 249F-21007 Dijon CedexTel: +33 (0) 3 80 42 41 40Fax: +33 (0) 3 80 42 41 23GermanyElectromechanical EuropeParker Hannifin GmbH & Co KG Robert-Bosch-Strasse 22 D-77656 Offenburg GermanyTel: +49 (0) 781 509 0Fax: +49 (0) 781 509 98176Email:********************IndiaParker Hannifin India Pvt. LtdAutomation Group-SSD Drives Div.133 & 151 Developed Plots Estate Perungudi, Chennai 600 096Tel: 044-4391-0799ax: 044-4391-0700ItalyParker Hannifin SpA Via Gounod 120092 Cinsello Balsamo Milano, ItalyTel: +39 02 361081Fax: +39 02 36108400Email: ********************KoreaParker Hannifin Korea9th Floor KAMCO Yangjae Tower 949-3 Dogok 1-dong Gangnam-gu Seoul 135-860, Korea Tel: 82-2-559-0454Fax: 82-2-556-8187MexicoParker Hannifin de Mexico Eje uno Norte No.100Parque Industrial Toluca 2000 Toluca, CP 50100 México Tel: 52-722-275-4200Fax: 52-722-279-0316SingaporeParker Hannifin Singapore Pte Ltd 11, Fourth Chin Bee Road Singapore 619702Tel: (65) 6887 6300Fax: (65) 6265 5125/6261 4929TaiwanParker Hannifin Taiwan Co., Ltd No. 40, Wuchiuan 3rd Road Wuku Industrial ParkTaipei County, Taiwan 248ROCTel: 886 2 2298 8987Fax: 886 2 2298 8982ThailandParker Hannifin (Thailand) Co., Ltd.1265 Rama 9 RoadSuanluang, Bangkok 10250 ThailandTel: (66) 2 186 7000Fax: (66) 2 374 1645UKParker Hannifin Ltd.Tachbrook Park Drive Tachbrook Park Warwick CV34 6TUTel: +44 (0) 1926 317970Fax: +44 (0) 1926 317980USAParker Hannifin Electronic Motion and Controls Division 1140 Sandy Hill Road Irwin, PA 15642Tel: 800-358-9070Email:**********************Parker Hannifin Hydraulic Pump & Power Systems Division 2101 N. Broadway New Ulm, MN 56073Tel: 800-358-9070Email:**********************Issue Date 6/2021© 2021 Parker Hannifin Corporation BRO-SM-0612SM Series: Made in the USA。
六管四合一双模无刷控制板说明书
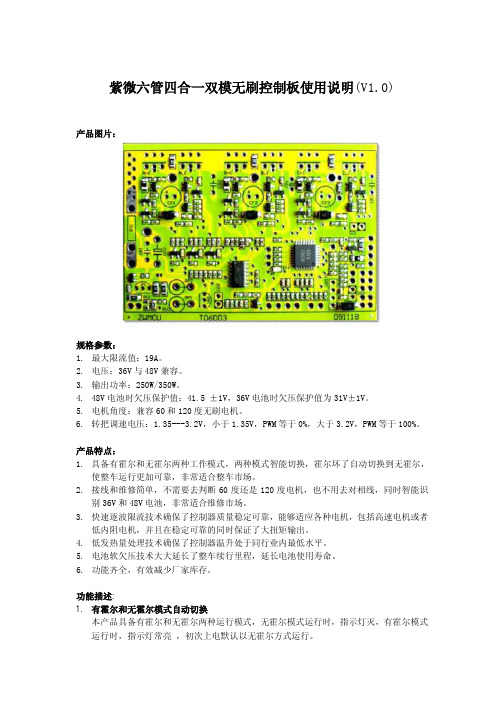
紫微六管四合一双模无刷控制板使用说明(V1.0)产品图片:规格参数:1.最大限流值:19A。
2.电压:36V与48V兼容。
3.输出功率:250W/350W。
4.48V电池时欠压保护值:41.5 ±1V,36V电池时欠压保护值为31V±1V。
5.电机角度:兼容60和120度无刷电机。
6.转把调速电压:1.35---3.2V,小于1.35V,PWM等于0%,大于3.2V,PWM等于100%。
产品特点:1.具备有霍尔和无霍尔两种工作模式,两种模式智能切换,霍尔坏了自动切换到无霍尔,使整车运行更加可靠,非常适合整车市场。
2.接线和维修简单,不需要去判断60度还是120度电机,也不用去对相线,同时智能识别36V和48V电池,非常适合维修市场。
3.快速逐波限流技术确保了控制器质量稳定可靠,能够适应各种电机,包括高速电机或者低内阻电机,并且在稳定可靠的同时保证了大扭矩输出。
4.低发热量处理技术确保了控制器温升处于同行业内最低水平。
5.电池软欠压技术大大延长了整车续行里程,延长电池使用寿命。
6.功能齐全,有效减少厂家库存。
功能描述:1.有霍尔和无霍尔模式自动切换本产品具备有霍尔和无霍尔两种运行模式,无霍尔模式运行时,指示灯灭,有霍尔模式运行时,指示灯常亮,初次上电默认以无霍尔方式运行。
如何从无霍尔模式切换到有霍尔模式接好电机霍尔线,加转把等电机转动后,只要检测到电机霍尔正常,控制器就会切换到有霍尔模式,以后上电只要控制器霍尔正常都以有霍尔模式运行。
如何从有霍尔模式切换到无霍尔模式如果电机转动,只要检测到电机霍尔损坏,控制器会马上切换到无霍尔模式。
如果电机不转,而电机霍尔拔掉或者损坏,必须释放转把,并且人为转动一下电机,才会切换到无霍尔模式。
如何切换电机运行方向先切换到无霍尔模式(释放转把,拔掉霍尔,并且转动一下电机),调换无刷电机任意两根相线,加调速转把,电机就以相反方向运行。
2.36V与48V电池自动识别上电识别: 如果处于无霍尔模式,则控制器上电后,检测电池电压大于41.5V就认为是48V电池,否则就认为36V电池;如果是有霍尔模式则调用上次记忆。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业缝纫机无刷直流电机控制板使用说明工业缝纫机无刷直流电机控制板包括主控板,显示板和调速板。
调速板输出调速信号给主控板,实施启动,刹车,调速等功能。
显示板可以调节最高运行转速,运行方向以及运行模式和显示当前转速等功能。
主控板是整个系统的核心,具备驱动无刷直流电机,保护等功能。
参数:输入电源为220V单相电源,最大输出功率400W。
工业缝纫机无刷直流电机控制系统的特点:
1.比同功率离合器电机省电60%,高效节能,即开即停,不存在空转耗能的现象。
2.利用数控调速系统驱动无刷电机,产品能直接带动缝制设备,调速性能好,方便灵敏,
性能稳定,安全可靠。
3.免维护,寿命长,采用无碳刷设计,长期使用无需更换任何内部部件。
4.相比离合器电机,有低速高转矩的优点。
5.噪音低,发热少。
运行期间对外界其他电子设备的干扰少。
6.电机转速可调范围在1600RPM到4200RPM之间,以200转的间隔循环进行调整。
7.结构简单,体积小,重量轻,是同功率离合器电机重量的二分之一。
显示板
显示板包括速度设置键,工作模式键,电机转向键和一个双位数码管。
背面包括一个四芯接口与主控板相连。
速度设置键
用于更改电机最高转速。
电机的最高转速可在1600RPM与4200RPM之间调整。
每按下该键一次,转速增加200RPM,当转速达到4200RPM时,按下该键,速度回到1600RPM,设置时数码管显示电机转速的前2位数字,如,4200RPM,显示42,显示时间为5秒钟。
工作模式键
用于选择电机的工作模式。
有P1,P2两种模式,P1适用于制衣业,P2适用于制鞋,制包等行业。
设置时数码管显示P1或者P2,显示时间5秒钟。
电机转向键
长按该键一次(按键时间大于5秒钟),可更改电机转向。
数码管会顺时钟或者逆时钟旋转显示,以指示电机运行方向。
数码管
数码管一共有两位,平时以顺时钟或者逆时钟方向显示以指示电机转动方向,当按下转速
键后,显示当前设置转速,当按下模式键后,显示当前运行模式P1或者P2。
当系统出故障时,显示故障代码:
E1 电机过流保护,停止工作后系统自动恢复到正常工作状态。
E2 电机相位错误保护,检查电机HALL插座安装是否正确。
E3 速度板错误保护,检查速度板是否有故障以及信号线是否松动。
E4 通讯错误显示板与主板的连接线是否松动,显示板是否有故障。
调速板
调速板根据启动开关的位置输出模拟信号给主控板,从而去控制电机的启动,调速,刹车等。
调速板的背面有一个五芯插座,与主控板相连。
主控板
主控板接收调速板以及显示板的信号,去驱动无刷直流电机运行。
包括以下接口:AC220:连接单相200V电源
MOTO:连接无刷直流电机主相线
SCON:连接显示板
HALL:连接无刷直流电机霍尔线
SPEED:连接调速板。