张力腿平台
海洋油井平台概述

各类海洋油井平台概述海洋石油钻采设备是海上油气田钻井与采油所用的工具和装备,它的种类繁多包罗万象,但归纳起来大体可以分为四类:1.海洋石油钻井平台;2.海洋石油采油平台;3.水上钻井机械设备;4.水下钻井机械设备。
本文主要介绍前两类,即:海洋石油钻井平台及海洋石油采油平台。
主要分为移动式平台和固定式平台两大类。
其中按结构又可分为:(1)移动式平台:坐底式平台、自升式平台、钻井船、半潜式平台(SEMI)、张力腿式平台(TLP)、牵索塔式平台、浮式生产处理系统(FPSO)、筒状平台(SPAR)。
(2)固定式平台:导管架式平台、混凝土重力式平台、深水顺应塔式平台。
移动式平台坐底式钻井平台坐底式钻井平台又叫钻驳或插桩钻驳,适用于河流和海湾等30米以下的浅水域。
坐底式平台有两个船体,上船体又叫工作甲板,安置生活舱室和设备,通过尾郡开口借助悬臂结构钻井;下部是沉垫,其主要功能是压载以及海底支撑作用,用作钻井的基础。
两个船体间由支撑结构相连。
这种钻井装置在到达作业地点后往沉垫内注水,使其着底。
因此从稳性和结构方面看,作业水深不但有限,而且也受到海底基础(平坦及坚实程度)的制约。
所以这种平台发展缓慢。
然而我国渤海沿岸的胜利油田、大港油田和辽河油田等向海中延伸的浅海海域,潮差大而海底坡度小,对于开发这类浅海区域的石油资源,坐底式平台仍有较大的发展前途。
目前已有几座坐底式平台用于极区,它可加压载坐于海底,然后在平台中央填砂石以防止平台滑移,完成钻井后可排出压载起浮,并移至另一井位。
自升式钻井平台自升式钻井平台被设计成为驳船的模样,具有可以升降的可延伸到海底的桩腿。
虽然有些设计能使其在海深500英尺(152米)的海域工作,但通常用于海深400英尺(122米)的地方,适合于近海。
其移位时平台降至水面,桩腿升起,平台就像驳船,可由拖轮把它拖移到目的地。
到达钻井目的地后,工作时桩腿下放插入海底,平台及平台上所有的钻井设备及其他器械被抬起到离开海面的安全工作高度,并对桩腿进行预压,以保证平台遇到风暴时桩腿不致下陷。
世界上第一座张力腿平台

世界上第一座张力腿平台:Hutton TLPHUTTON TLP - ARDERSIER YARD1984年8月,在近30年的理论和实验研究的基础上,世界上第一座实用化张力腿平台由Conoco公司在北海Hutton油田157m水深处建成投产。
Hutton TLP是一座中等水深油气钻探、生产的综合性平台。
它的平台本体由6根立柱和4个浮筒组成,由16根垂直系于海底基础基座的张力筋腱将平台本体固定。
每根张力筋腱是由厚壁钢管组成的。
16根张力筋腱共分为4组,也就是4条张力腿。
平台每根角柱都对应一条张力腿。
张力腿上端穿过角柱在水平面之上和甲板相铆固,下端与海底地基基础相连,通过平台本体的浮力保持张拉的受力状态。
Hutton TLP所处海底地基为中等强度黏土,因此选择了4个相互独立的重力式基础。
这种基础在通常的土质下计算简单,设计可靠。
Hutton TLP float out其实,在中等水深条件下,钢导管架平台是较经济的石油平台类型。
当时选择张力腿平台形式的一个重要目的是希望在中等海况下获得关于张力腿平台运动性能的一些实测数据,为以后张力腿平台在深海域的广泛设计应用提供科学依据。
从这种意义上来说,Hutton TLP也是一座实验平台。
在Hutton TLP建成投产后,取得了良好的经济效益,建立了业界将张力腿平台投入生产领域的信心,而且,各国学者围绕其进行了广泛而卓有成效的研究工作,为后来建造其他张力腿平台打下了坚实的基础。
A workboat at anchor, with the Hull of the Hutton TLP catching the last rays of the spring sun.Hutton TLP LegsHutton TLP Legs第一代张力腿平台总述第一代张力腿平台,即传统类型的张力腿平台,应用时间长、分布范围广、平台数量多、设计理论成熟,在张力腿平台发展的历史中占有很重要的地位。
张力腿平台

张力腿平台发展与简介导管架平台和重力平台由于其自重和工程造价随水深大幅度地增加, 已经不适应深水域油气开发, 所以本世纪60 年代提出了顺应式平台的概念, 并在近20年的平台设计中得到了广泛的发展应用。
顺应式结构的典型实例是张力腿平台(Tension LegPlatform 简称为TLP)。
张力腿平台最重要的特点是平台的竖向运动很小, 水平方向的运动是顺应式的, 结构惯性力主要是水平方向的回弹力。
张力腿平台的结构造价一般不会随水深增加而大幅度地增大。
近二十年来, 经过张力腿平台设计生产的实践,证明张力腿平台具有良好的运动性能, 是深水海域油气生产适宜的平台形式。
张力腿平台结构张力腿平台(简称TLP)适用于较深水域(300~1500m)、且可采油气储量较大的油田。
TLP 一般由上部模块(Topside)、甲板、船体(下沉箱)、张力钢索及锚系、底基等几部分组成。
其船体(下沉箱)可以是三、四或多组沉箱,下设3~6组或多组张力钢索,垂直与海底锚定。
平台及其下部沉箱受海水浮力,使张力钢索始终处于张紧状态,故在钻井或采油作业时,TLP几乎没有升沉运动和平移运动。
其微小的升沉和平移运动(平移运动仅为水深的1.5% ~2%),在钻井和完井时主要由水中和井内相对细长的钻具及专用短行程补偿器补偿张力腿平台技术特点张力腿式钻井平台是利用绷紧状态下的锚索产生的拉力与平台的剩余浮力相平衡的钻井平台或生产平台。
张力腿式钻井平台也是采用锚泊定位的,但与一般半潜式平台不同。
其所用锚索绷紧成直线,不是悬垂曲线,钢索的下端与水底不是相切的,而是几乎垂直的。
用的是桩锚(即打入水底的桩为锚)或重力式锚(重块)等,不是一般容易起放的抓锚。
张力腿式平台的重力小于浮力,所相差的力量可依靠锚索向下的拉力来补偿,而且此拉力应大于由波浪产生的力,使锚索上经常有向下的拉力,起着绷紧平台的作用。
作用于张力腿式钻井平台上的各种力并不是稳定不变的。
在重力方面会因载荷与压载水的改变而变化;浮力方面会因波浪峰谷的变化而增减;扰动力方面因风浪的扰动会在垂向与水平方向产生周期变化,所以张力腿的设计,必须周密考虑不同的载荷与海况。
深水浮式平台的类型
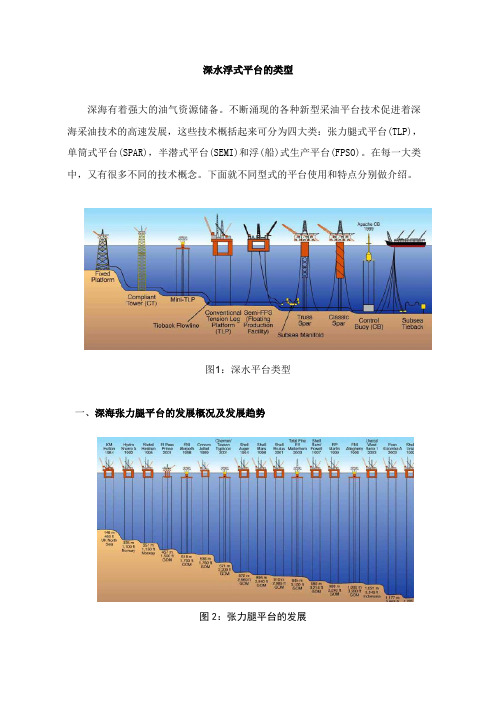
深水浮式平台的类型深海有着强大的油气资源储备。
不断涌现的各种新型采油平台技术促进着深海采油技术的高速发展,这些技术概括起来可分为四大类:张力腿式平台(TLP),单筒式平台(SPAR),半潜式平台(SEMI)和浮(船)式生产平台(FPSO)。
在每一大类中,又有很多不同的技术概念。
下面就不同型式的平台使用和特点分别做介绍。
图1:深水平台类型一、深海张力腿平台的发展概况及发展趋势图2:张力腿平台的发展自1954年美国的提出采用倾斜系泊方式的索群固定的海洋平台方案以来,张力腿平台(TLP)经过近50年的发展,已经形成了比较成熟的理论体系。
1984年第一座实用化TLP——Hutton平台在北海建成之后,TLP在生产领域的应用也越来越普遍,逐渐成为了当今世界深海采油领域的两大主力军之一(另一种当前广泛使用的深海采油平台是Spar,将在后面部分中进行详细介绍)。
进入上个世纪90年代之后,TLP平台的发展进一步加速,在生产区域方面,TLP的应用已经从北海和墨西哥湾扩展到了西非沿海;在平台种类方面,TLP已经在原有的传统类型TLP基础上,发展出了Mini-TLP、ETLP等多种新概念张力腿平台,加之不断地采用最新地科学技术,TLP平台在降低成本,提高适应性、稳定性和安全性地道路上取得了长足地进步。
下面将简要介绍张力腿平台的总体结构,然后对1990年之后TLP平台的发展状况进行详细的论述。
1、张力腿平台总体结构简介张力腿平台(TensionLegplatform,简称TLP)是一种典型的顺应式平台,通过数条张力腿与海底相连。
张力腿平台的张力筋腱中具有很大的预张力,这种预张力是由平台本体的剩余浮力提供的。
在这种以预张力形式出现的剩余浮力作用下,张力腿时刻处于受预拉的绷紧状态,从而使得平台本体在平面外的运动(横摇、纵摇、垂荡)近于刚性,而平面内的运动(横荡、纵荡、首摇)则显示出柔性,环境载荷可以通过平面内运动的惯性力而不是结构内力来平衡。
张力腿平台简介
张力腿平台简介一.第一代张力腿平台总述第一代张力腿平台,即传统类型的张力腿平台,应用时间长、分布范围广、平台数量多、设计理论成熟,在张力腿平台发展的历史中占有很重要的地位。
从1984年至今,世界上建成投入生产的传统类型张力腿平台共有11座,尚未发生过倾覆、沉没等重大事故,拥有优良的工作记录,由此坚定了业界对TLP这种新兴海洋平台结构的信心。
在其发展的20年时间里,世界各国的研究者和工程技术人员积累了丰富的设计应用经验和技术数据,为以后张力腿平台的发展打下了坚实的基础。
在已建成的11座传统类型的张力腿平台中,Shell石油公司在1994—2001年7年间连续建造的5座张力腿平台具有一定的代表性,分别为Auger、Mars、Ram、Ursa和Brutus。
通过第一代张力腿平台的生产实践,进一步证明了张力腿平台在深海域半刚性半柔性的优良运动性能和经济性,但是同时亦发现传统的张力腿平台结构形式仍存在着一定的不足。
①在水深超过1200m的极深水水域,随着张力筋腱长度的增加,出现了张力腿自重过大的问题,并且由于张力筋腱在深水中的受力情况发生改变,因此影响了平台的定位性能。
②在降低造价、改善受力情况和运动性能的方面,传统类型张力腿平台的本体结构仍需要进一步改进。
③差频载荷是一个缓慢变化的力,它将和同样缓慢变化的张力腿平台平面内的运动发生共振。
另外,风的激振力也在这个差频范围内,必然会加剧这种慢漂运动。
④波浪的高频分量和高频水动力会引起张力腿平台平面外的共振,通常称为Springing和Ringing。
张力腿平台结构这两个问题随着水深的增加而加剧,对结构的安全性有很大的影响。
⑤传统的张力腿平台是通过海底基础固定入位的,随着水深的增加,海底基础的设计、施工变得十分复杂。
因此,张力腿平台所具有的经济、安全和良好的动力特性在更深水域中均不能得到充分的发挥,传统类型的张力腿平台结构已经不能很好地适应更深的水域。
各国学者对张力腿平台结构形式的不断改进完善非常重视,因此,混合式张力腿平台及悬式张力腿平台等新型的张力腿平台便应运而生二.张力腿平台的工作原理及性能张力腿平台设计最主要的思想是使平台半顺应半刚性。
TLP平台调研

张力腿监测系统(TTMS)
目的
为确定张力筋腱的受力状态以及平台上部荷载 的分布情况,一般进行TLP张力筋腱张力测量。
冗余 容错
依据
当张力接近0甚至为负,或超过其张力许用值 时,均表明上部荷载或环境荷载超过许用值。 顶张力
提供实时和历史数据
监测内容
弯曲载荷 VIV
查询,报警功能,并 结合特定算法分析辅 助调整平台质量分配
张力腿平台受力状态
波浪周期范围 (5-20s)
3、张力腿平台的水面运动自由度(纵荡、横荡和艏 摇)运动周期与半潜式平台或SPAR平台相同,一般为 100-200s.
波频响应
浪致运动
低频响应
高频响应
涡激运动
THANKS
MOSES平台结构形式
SeaSar平台结构形式
典型TLP的结构形式
张力腿海洋平台结构示意图源自2、张力腿平台监测系统 张力腿系统(TTS) 功能
每组张力腿通常由 2-4根张力筋腱组成
张力腿产生的拉力将TLP限制在允
许的运动偏差及合理姿态和吃水范围内,实 现平台在设计环境下的生产功能需求。
张力筋腱 上端和下端接头 TTS
功能
评估 验证 辅助
TTMS 结构组成图
3、水动力性能
稳性 抗倾覆和抗滑移能力。
张力腿平台服役状态稳性来自 于张力腿的张力。因此,标准要求 进行完整和损伤分析来规范张力腿 设计以确保平台稳性 。
北海挪威钻井平台倾覆事故
张力腿设计原则
(1)最小预张力应确保在设计极 端环境条件下,张力腿的张力大于 零。
TLP平台调研(二)
徐留洋
2017.03.21
1
2
3
1、张力腿平台
张力腿平台

MOSES TLP的主体由四 根细长角柱和一个水下浮式 基座构成。平台的浮力主要 由水下浮式基座提供。
ETLP
9
按采油树位置分类
湿树平台 采油树位于海底。减少了平台上体的负载,不需要建造体 积庞大的平台主体,因而降低了平台的总体造价,湿树平台的 生产储备能力具有很大的弹性,新增的设备和海底油井容易加 装到现有的生产系统中,对油田的远期开发比较方便。
5
建造与安装过程
张力腿平台通常是将平台主体和上体分开建造,然后在海上进行合拢。
SeaStar TLP的整个安装过程可以分为4个独立的阶段进行。每个阶段耗时 都较短,并且当每个安装阶段结束后.己完成安装的平台部分都处于风暴 安全状态.可以最大程度地缩短平台处于不稳定状态中的时间,降低了作 业风险。
7
第一代张力腿平台
Heidrun TLP建成于1995年,位 于北海距挪威海岸175km的海域,工 作水深345m。 Heidrun TLP是世界上第一座也 是惟一的一座混凝土张力腿平台。因为 其主体构造采用了混凝土结构,所以主 体排水量远远超过其他钢制张力腿平台, 达到了288000t左右。 从1984年至今,世界上建成投入 生产的传统类型张力腿平台共有11座, 尚未发生过倾覆、沉没等重大事故,拥 有优良的工作记录,由此坚定了业界对 TLP这种新兴海洋平台结构的信心。
张力腿平台通过自身的结构形式,产生远大于结构自重的 浮力,剩余部分称为剩余浮力。这部分剩余浮力与预张力 平衡。
半顺应半刚性:
预张力使张力腿时刻处于受张拉的绷紧状态,从而使平台 平面外的运动(横摇、纵摇和垂荡)较小,近似于刚性。 张力腿平台本体主要是直立浮筒结构,一般浮筒所受波浪 力的水平方向分力较垂直方向分力大,因而通过张力腿在 平面内的柔性,实现平台平面内的运动(纵荡、横荡和首 摇),即为顺应式。
张力腿平台
张力腿平台发展与简介导管架平台和重力平台由于其自重和工程造价随水深大幅度地增加, 已经不适应深水域油气开发, 所以本世纪60 年代提出了顺应式平台的概念, 并在近20年的平台设计中得到了广泛的发展应用。
顺应式结构的典型实例是张力腿平台(Tension LegPlatform 简称为TLP)。
张力腿平台最重要的特点是平台的竖向运动很小, 水平方向的运动是顺应式的, 结构惯性力主要是水平方向的回弹力。
张力腿平台的结构造价一般不会随水深增加而大幅度地增大。
近二十年来, 经过张力腿平台设计生产的实践,证明张力腿平台具有良好的运动性能, 是深水海域油气生产适宜的平台形式。
张力腿平台结构张力腿平台(简称TLP)适用于较深水域(300~1500m)、且可采油气储量较大的油田。
TLP 一般由上部模块(Topside)、甲板、船体(下沉箱)、张力钢索及锚系、底基等几部分组成。
其船体(下沉箱)可以是三、四或多组沉箱,下设3~6组或多组张力钢索,垂直与海底锚定。
平台及其下部沉箱受海水浮力,使张力钢索始终处于张紧状态,故在钻井或采油作业时,TLP几乎没有升沉运动和平移运动。
其微小的升沉和平移运动(平移运动仅为水深的1.5% ~2%),在钻井和完井时主要由水中和井内相对细长的钻具及专用短行程补偿器补偿张力腿平台技术特点张力腿式钻井平台是利用绷紧状态下的锚索产生的拉力与平台的剩余浮力相平衡的钻井平台或生产平台。
张力腿式钻井平台也是采用锚泊定位的,但与一般半潜式平台不同。
其所用锚索绷紧成直线,不是悬垂曲线,钢索的下端与水底不是相切的,而是几乎垂直的。
用的是桩锚(即打入水底的桩为锚)或重力式锚(重块)等,不是一般容易起放的抓锚。
张力腿式平台的重力小于浮力,所相差的力量可依靠锚索向下的拉力来补偿,而且此拉力应大于由波浪产生的力,使锚索上经常有向下的拉力,起着绷紧平台的作用。
作用于张力腿式钻井平台上的各种力并不是稳定不变的。
在重力方面会因载荷与压载水的改变而变化;浮力方面会因波浪峰谷的变化而增减;扰动力方面因风浪的扰动会在垂向与水平方向产生周期变化,所以张力腿的设计,必须周密考虑不同的载荷与海况。
海洋工程各种平台分类与介绍

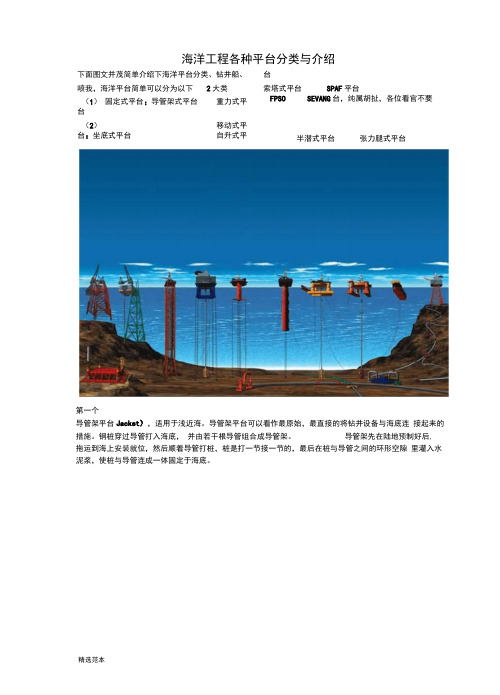
海洋工程各种平台分类与介绍下面图文并茂简单介绍下海洋平台分类、钻井船、FPSO SEVAN平台,纯属胡扯,各位看官不要喷我,海洋平台简单可以分为以下2大类(1)固定式平台:导管架式平台重力式平台(2)移动式平台: 坐底式平台自升式平台半潜式平台张力腿式平台牵索塔式平台SPAR平台第一个导管架平台(Jacket),适用于浅近海。
导管架平台可以看作最原始,最直接的将钻井设备与海底连接起来的措施。
钢桩穿过导管打入海底,并由若干根导管组合成导管架。
导管架先在陆地预制好后,拖运到海上安装就位,然后顺着导管打桩,桩是打一节接一节的,最后在桩与导管之间的环形空隙里灌入水泥浆,使桩与导管连成一体固定于海底。
重力式(混凝土)钻井平台: 混凝土重力式平台的底部通常是一个巨大的混凝土基础(沉箱),用三个或四个空心的混凝土立柱支撑着甲板结构,在平台底部的巨大基础中被分隔为许多圆筒型的贮油舱和压载舱,这种平台的重量可达数十万吨,正是依靠自身的巨大重量,平台直接置于海底。
坐底式钻井平台是早期在浅水区域作业的一种移动式钻井平台。
平台分本体与下体(即浮箱),由若干立柱连接平台本体与下体,平台上设置钻井设备、工作场所、储藏与生活舱室等。
钻井前在下体中灌入压载水使之沉底,下体在坐底时支承平台的全部重量,而此时平台本体仍需高出水面,不受波浪冲击。
自升式钻井平台(Jack-up)又称甲板升降式或桩腿式平台。
这种石油钻井装置在浮在水面的平台上装载钻井机械、动力、器材、居住设备以及若干可升降的桩腿,钻井时桩腿着底,平台则沿桩腿升离海面一定高度;移位时平台降至水面,桩腿升起,平台就像驳船,可由拖轮把它拖移到新的井位。
半潜式平台(Semi)是大部分浮体沉没于水中的一种小水线面的移动式平台,它从坐底式平台演变而来,由平台本体、立柱和下体或浮箱组成。
此外,在下体与下体、立柱与立柱、立柱与平台本体之间还有一些支撑与斜撑连接,在下体问的连接支撑一般都设在下体的上方,这样,当平台移位时,可使它位于水线之上,以减小阻力;平台上设有钻井机械设备、器材和生活舱室等,供钻井工作用。
张力腿平台短周期运动响应特性及影响因素分析

平台控制策略优化设计
总结词
提高控制精度、增强抗干扰能力、实现快 速响应
VS
详细描述
研究优化平台的控制策略,包括对锚链张 力的控制、对平台姿态的控制等,以提高 控制精度,增强抗干扰能力,并实现快速 响应。
平台环境适应性优化设计
总结词
增强平台环境适应性、降低环境因素的影 响
详细描述
通过研究平台在不同环境条件下的响应特 性,优化平台的设计,以增强平台对环境 的适应性,并降低环境因素对平台性能的 影响。
控制参数选择
在选择控制策略后,控制参数的选择也会影响平台的运动响应。例如,在PID控 制中,比例、积分和微分参数的选择会对平台的运动产生直接影响。
04
张力腿平台的优化设计研 究
平台结构优化设计
总结词
提高平台稳定性、降低能耗、减轻重量
详细描述
通过分析平台结构的力学特性,研究优化平台的主船体、张 力腿、锚链等关键部件的设计,以提高平台的稳定性,并降 低平台的能耗和重量。
实验结果与理论分析的对比与讨论
要点一
对比分析
要点二
讨论
将实验结果与理论分析进行对比,验证了理论模型的准 确性,发现了实验中一些特殊情况下的误差和不足。
对实验结果和理论分析进行了深入讨论,提出了改进实 验和理论模型的建议,为后续研究提供了参考。
感谢您的观看
THANKS
根据平台运动方程的形式和特点,选择合适的求解 方法,如数值积分法、解析法等。
数值积分
采用数值积分法对平台运动方程进行求解,得到平 台运动响应的时间历程。
结果分析
对求解结果进行分析,包括位移、速度、加速度等 响应特征。
平台运动特性的分析方法
时域分析
各类平台详解
随着人类对油气资源开发利用的深化,油气勘探开发从陆地转入海洋。
因此,钻井工程作业也必须在浩瀚的海洋中进行。
在海上进行油气钻井施工时,几百吨重的钻机要有足够的支撑和放置的空间,同时还要有钻井人员生活居住的地方,海上石油钻井平台就担负起了这一重任。
由于海上气候的多变、海上风浪和海底暗流的破坏,海上钻井装置的稳定性和安全性更显重要。
目前的海上石油钻井平台可分为固定式和移动式两种。
固定式钻井平台大都建在浅水中,它是借助导管架固定在海底而高出海面不再移动的装置,平台上面铺设甲板用于放置钻井设备。
支撑固定平台的桩腿是直接打入海底的,所以,钻井平台的稳定性好,但因平台不能移动,故钻井的成本较高。
为解决平台的移动性和深海钻井问题,又出现了多种移动式钻井平台,主要包括:坐底式钻井平台、自升式钻井平台、钻井浮船和半潜式钻井平台。
坐底式钻井平台又称沉浮式或沉底式钻井平台,其上部和固定式钻井平台类似,其下部则是由若干个浮筒或浮箱组成的桁架结构,充水后,使钻井平台下沉坐于海底并处于工作状态,排水后,使钻井平台上浮可进行拖航和移位。
坐底式钻井平台多用于水浅、浪小、海底较平坦的海区。
自升式钻井平台是有多个(一般为3~4个)桩腿插入海底,并可自行升降的移动式钻井平台。
自升式钻井平台基本由两部分组成,一部分是可以安放钻井设备、器材和生活区的平台,另一部分是可升降并可插入海底的桩腿。
我国自行制造的自升式钻井平台“渤海一号”平台的四根桩腿是由圆形的钢管做成的,桩腿的高度有七十多米,升降装置是插销式液压控制机构。
该型钻井平台造价较低、运移性好、对海底地形的适应性强,因而,我国海上钻井多使用自升式钻井平台。
钻井平台桩腿的高度总是有限的,为解决在深海区的钻井问题,又出现了漂浮在海面上的钻井船。
钻井船的排水量从几千吨到几万吨不等,它既有普通船舶的船型和自航能力,又可漂浮在海面上进行石油钻井。
由于钻井船经常处于漂浮状态,当遇到海上的风、浪、潮时,必然会发生倾斜、摇摆、平移和升降现象,因此钻井船的稳定性是一个非常关键的问题。
海洋工程各种平台分类与介绍
海洋工程各种平台分类与介绍下面图文并茂简单介绍下海洋平台分类、钻井船、喷我,海洋平台简单可以分为以下2大类(1)固定式平台:导管架式平台重力式平台(2)移动式平台:坐底式平台自升式平台索塔式平台SPAF平台FPSO SEVANG台,纯属胡扯,各位看官不要半潜式平台张力腿式平台第一个导管架平台Jacket),适用于浅近海。
导管架平台可以看作最原始,最直接的将钻井设备与海底连接起来的措施。
钢桩穿过导管打入海底,并由若干根导管组合成导管架。
导管架先在陆地预制好后, 拖运到海上安装就位,然后顺着导管打桩,桩是打一节接一节的,最后在桩与导管之间的环形空隙里灌入水泥浆,使桩与导管连成一体固定于海底。
重力式(混凝土)钻井平台:混凝土重力式平台的底部通常是一个巨大的混凝土基础(沉箱),用三个或四个空心的混凝土立柱支撑着甲板结构,在平台底部的巨大基础中被分隔为许多圆筒型的贮油舱和压载舱,这种平台的重量可达数十万吨,正是依靠自身的巨大重量,平台直接置于海底。
UR 1坐底式钻井平台是早期在浅水区域作业的一种移动式钻井平台。
平台分本体与下体(即浮箱),由若干立柱连接平台本体与下体,平台上设置钻井设备、工作场所、储藏与生活舱室等。
钻井前在下体中灌入压载水使之沉底,下体在坐底时支承平台的全部重量,而此时平台本体仍需高出水面,不受波浪冲击。
自升式钻井平台(Jack-up)又称甲板升降式或桩腿式平台。
这种石油钻井装置在浮在水面的平台上装载钻井机械、动力、器材、居住设备以及若干可升降的桩腿,钻井时桩腿着底,平台则沿桩腿升离海面一定高度;移位时平台降至水面,桩腿升起,平台就像驳船,可由拖轮把它拖移到新的井位。
半潜式平台(Semi)是大部分浮体沉没于水中的一种小水线面的移动式平台,它从坐底式平台演变而来,由平台本体、立柱和下体或浮箱组成。
此外,在下体与下体、立柱与立柱、立柱与平台本体之间还有一些支撑与斜撑连接,在下体问的连接支撑一般都设在下体的上方,这样,当平台移位时,可使它位于水线之上,以减小阻力;平台上设有钻井机械设备、器材和生活舱室等,供钻井工作用。
张力腿平台TensionLegPlatformTLP

现代海洋工程 -施工特点
与传统船舶相比施工工艺差别较大,以管路为例
船舶管路常以管段为单位进行预制,表面处理再 安装
海洋工程以管路为单位现场下料,现场焊接,表 面只需简单
现代海洋工程 -项目特点
巨大经济效益和投资风险
• 巨额投资、回报率高 • 业主信誉高、付款条件好 • 工期要求苛刻、延期罚款巨大
1700+ seats of SmartMarine 3D
Recent Marine Successes
双浮筒半潜式平台
四浮筒半潜式平台
张力腿平台 Tension Leg Platform (TLP)
张力腿平台的上部类似于半潜式平台,整个平台通过张力腿(系泊钢管或钢索) 垂直向下固定于海底。
与导管架平台不同的是,它的造价随水深的增加变化较小。 此外由于每个张力腿都有很大的预张力,其在波浪中的运动性能要好于半潜式平
特别敏感
• 易燃、易爆物多 • 消防、灭火、报警系统复杂 • 防污染、环保要求高 • 审图、现场检验严
Intergraph 海事工业主要客户
SmartMarine Customers
GRAD Members ❖ Samsung Heavy Industry (SM3D-SPF-SSK) ❖ Universal (SM3D) ❖ Odense Steel Shipyard (SM3D-SPPID-SPF) Class Societies: ❖ Lloyds Register (SM3D) ❖ ABS (SM3D) ❖ DNVS (SM3D) Asia Pacific Region ❖ Keppel Fels (SM3D – SPPID – SPEL - SPI) ❖ Tsuneishi (SM3D – SM Enterprise) ❖ Daewoo (SM3D) ❖ MARIC (SM3D) ❖ Cosco-CSG (SM3D) ❖ CSSRC (SM3D) ❖ Six Tee (SM3D) ❖ Hyin Engineering (SM3D) EMEA & India ❖ Grenland Group (SM3D) ❖ Ghesa (SM3D - PDS) ❖ BMT (NED) ❖ RollsRoyce (NED) ❖ Agip KCO (SM3D – SPEnterprise) ❖ Rolta (SM3D) Americas ❖ Martec (SM3D) ❖ Projemar (SM3D-SPPID-SPI-SPR) ❖ Naval Surface Warfare Center Carderock Division (SM3D) ❖ Petrobras (SM3D pilot- SPPID –SPI - SPEL- SPF -SPRD – SPM)
海洋平台发展与展望
海洋平台发展与展望海洋,这片广袤而神秘的领域,蕴藏着无尽的资源和巨大的发展潜力。
海洋平台作为人类探索和开发海洋资源的重要工具,其发展历程见证了人类科技的不断进步和对海洋认知的逐步深化。
海洋平台的发展可以追溯到很久以前。
早期的海洋平台主要用于海洋观测和简单的渔业活动,结构简单,功能单一。
随着工业革命的推进和技术的飞速发展,海洋平台逐渐变得更加复杂和多样化。
在 20 世纪中叶,随着石油工业的迅速崛起,固定式海洋平台成为了海洋石油开发的主要设施。
这些平台通常通过桩腿固定在海底,能够承受较大的风浪和海流冲击。
它们为石油的开采和生产提供了稳定的工作环境,使得海洋石油产量大幅增加。
然而,固定式海洋平台也存在一些局限性,比如只能在特定的海域和水深条件下使用,移动性差等。
为了克服固定式海洋平台的不足,半潜式海洋平台应运而生。
半潜式平台的主体部分位于水面以下,通过浮力和压载系统来保持稳定。
这种设计使得平台能够在更深的海域作业,并且具有更好的抗风浪能力。
半潜式平台的出现,大大拓展了海洋石油开发的领域。
与此同时,张力腿平台也逐渐崭露头角。
张力腿平台通过垂直的张力腿与海底相连,能够有效地限制平台的运动,提供较高的稳定性。
这种平台适用于中等水深的海域,在石油和天然气开发中发挥了重要作用。
随着技术的不断进步,浮式生产储油卸油装置(FPSO)成为了海洋石油开发中的明星。
FPSO 集生产、储存和卸载功能于一体,具有很强的机动性和适应性。
它可以在不同的海域进行作业,并且能够快速部署和撤离,大大提高了海洋石油开发的效率和经济性。
除了石油和天然气开发,海洋平台在其他领域也有着广泛的应用。
例如,在海洋风电领域,海上风力发电平台为清洁能源的获取提供了新的途径。
这些平台通常建在近海或远海地区,利用丰富的风力资源发电。
在海洋科研方面,科研海洋平台为科学家们提供了深入研究海洋生态、海洋气候、海洋地质等方面的平台。
它们配备了先进的科学仪器和设备,能够收集大量宝贵的数据和样本,为海洋科学的发展做出了重要贡献。
深水浮式平台的类型
深水浮式平台的类型深海有着强大的油气资源储备。
不断涌现的各种新型采油平台技术促进着深海采油技术的高速发展,这些技术概括起来可分为四大类:张力腿式平台(TLP),单筒式平台(SPAR),半潜式平台(SEMI)和浮(船)式生产平台(FPSO)。
在每一大类中,又有很多不同的技术概念。
下面就不同型式的平台使用和特点分别做介绍。
图1:深水平台类型一、深海张力腿平台的发展概况及发展趋势图2:张力腿平台的发展自1954年美国的提出采用倾斜系泊方式的索群固定的海洋平台方案以来,张力腿平台(TLP)经过近50年的发展,已经形成了比较成熟的理论体系。
1984年第一座实用化TLP——Hutton平台在北海建成之后,TLP在生产领域的应用也越来越普遍,逐渐成为了当今世界深海采油领域的两大主力军之一(另一种当前广泛使用的深海采油平台是Spar,将在后面部分中进行详细介绍)。
进入上个世纪90年代之后,TLP平台的发展进一步加速,在生产区域方面,TLP的应用已经从北海和墨西哥湾扩展到了西非沿海;在平台种类方面,TLP已经在原有的传统类型TLP基础上,发展出了Mini-TLP、ETLP等多种新概念张力腿平台,加之不断地采用最新地科学技术,TLP平台在降低成本,提高适应性、稳定性和安全性地道路上取得了长足地进步。
下面将简要介绍张力腿平台的总体结构,然后对1990年之后TLP平台的发展状况进行详细的论述。
1、张力腿平台总体结构简介张力腿平台(Tension Leg platform,简称TLP)是一种典型的顺应式平台,通过数条张力腿与海底相连。
张力腿平台的张力筋腱中具有很大的预张力,这种预张力是由平台本体的剩余浮力提供的。
在这种以预张力形式出现的剩余浮力作用下,张力腿时刻处于受预拉的绷紧状态,从而使得平台本体在平面外的运动(横摇、纵摇、垂荡)近于刚性,而平面内的运动(横荡、纵荡、首摇)则显示出柔性,环境载荷可以通过平面内运动的惯性力而不是结构内力来平衡。
中国海洋平台的现状与发展浅析
中国海洋平台的现状与发展浅析摘要:未来的油气能源将继续在世界能源需求中占据主导地位,海洋石油已成为未来世界石油开采的主要来源。
在面临世界各国对人类共同拥有的深海资源激烈竞争的形势下,须高度重视对深海平台技术的研究。
目前主要投入使用的海洋平台主要有四种:张力腿平台,半潜式平台,浮式平台,单柱式平台(spar )。
近年来我国虽然在海洋平台建造及技术研究方面做了大量工作,并取得了可喜的成绩,但就海洋装备技术实力和技术水平而言,我国与发达国家之间还存在着很大的差距。
因此,我国必须加快科研步伐,早日步入世界海洋石油装备强国行列。
1 世界海洋石油资源的背景目前,世界石油工业正面临着极大的挑战。
全球油气储量增长乏力,远远无法弥补每年的产量。
然而全球的油气消耗量仍将以较快的速度增长。
根据国际能源署发布的世界能源展望预测,世界石油需求在2030 年之前将保持年均 1.6%的增长,到2030 年达到57.69 亿吨。
天然气需求在2030年之前将保持年均 2.4%的增长,到2030 年达到42.03 亿吨油当量。
未来的油气能源将继续在世界能源需求中占据主导地位,到2030 年油气需求将占世界能源总需求的65%。
天然气资源估计将在2015 年超过煤炭资源成为第二大能源种类.随着陆上石油资源的日渐枯竭,海洋石油已成为未来世界石油开采的主要来源。
随着中国经济的发展,特别是作为支柱产业的石油化工和汽车工业的快速发展,石油和天然气供应不足的矛盾日益突出。
我国从1993 年开始,原油供应皿满足不了市场需求,因而从石油出口国变为石油进口国。
2 海洋平台技术的价值己探明的世界海洋石油储量的80%以上在水深500m以内,而全部海洋面积的90%以上水深在200 一6000m之间,因而大量的海域而积有待探明。
此外,世界上除了少数海域以外,大部分地区的近海油气资源己口趋减少,向深海发展己成必然趋势,深海平台技术己成为国际海洋工程界的一个热点,进行了大量的研究,新的深海平台结构不断涌现。
深水浮式平台的类型

深水浮式平台的类型深海有着强大的油气资源储备。
不断涌现的各种新型采油平台技术促进着深海采油技术的高速发展,这些技术概括起来可分为四大类:张力腿式平台(TLP),单筒式平台(SPAR),半潜式平台(SEMI)和浮(船)式生产平台(FPSO)。
在每一大类中,又有很多不同的技术概念。
下面就不同型式的平台使用和特点分别做介绍。
图1:深水平台类型一、深海张力腿平台的发展概况及发展趋势图2:张力腿平台的发展自1954年美国的提出采用倾斜系泊方式的索群固定的海洋平台方案以来,张力腿平台(TLP)经过近50年的发展,已经形成了比较成熟的理论体系。
1984年第一座实用化TLP——Hutton平台在北海建成之后,TLP在生产领域的应用也越来越普遍,逐渐成为了当今世界深海采油领域的两大主力军之一(另一种当前广泛使用的深海采油平台是Spar,将在后面部分中进行详细介绍)。
进入上个世纪90年代之后,TLP平台的发展进一步加速,在生产区域方面,TLP的应用已经从北海和墨西哥湾扩展到了西非沿海;在平台种类方面,TLP已经在原有的传统类型TLP基础上,发展出了Mini-TLP、ETLP等多种新概念张力腿平台,加之不断地采用最新地科学技术,TLP平台在降低成本,提高适应性、稳定性和安全性地道路上取得了长足地进步。
下面将简要介绍张力腿平台的总体结构,然后对1990年之后TLP平台的发展状况进行详细的论述。
1、张力腿平台总体结构简介张力腿平台(Tension Leg platform,简称TLP)是一种典型的顺应式平台,通过数条张力腿与海底相连。
张力腿平台的张力筋腱中具有很大的预张力,这种预张力是由平台本体的剩余浮力提供的。
在这种以预张力形式出现的剩余浮力作用下,张力腿时刻处于受预拉的绷紧状态,从而使得平台本体在平面外的运动(横摇、纵摇、垂荡)近于刚性,而平面内的运动(横荡、纵荡、首摇)则显示出柔性,环境载荷可以通过平面内运动的惯性力而不是结构内力来平衡。
深水张力腿平台系泊系统耦合动力分析的开题报告

深水张力腿平台系泊系统耦合动力分析的开题报告一、选题背景及意义深水张力腿平台是一种在深海环境下进行开采和生产的海上平台,广泛应用于石油、天然气等能源领域。
其系泊系统作为保证平台稳定性和安全性的关键部分,其耦合动力特性的研究对于提高平台的设计和运行能力具有重要意义。
二、研究内容本论文主要围绕深水张力腿平台系泊系统耦合动力特性开展研究,包括以下方面:1. 深入了解深水张力腿平台系泊系统的结构和工作原理,对平台的各种动力载荷进行分类和计算分析。
2. 建立深水张力腿平台系泊系统的数学模型,利用流体动力学理论,分析平台在海洋环境中受到的各种动力载荷以及耦合作用下产生的系统实时响应。
3. 利用ANSYS软件进行数值仿真,对深水张力腿平台系泊系统的状态响应进行分析和评估。
4. 针对深水张力腿平台系泊系统的动态响应特性,提出相应的控制策略,以提高平台的稳定性和安全性。
三、研究意义本论文将深入探究深水张力腿平台系泊系统的耦合动力特性,为平台的设计和运行提供较完整的理论依据和技术支撑,具有以下意义:1. 为海洋平台工程研究提供了切入点,有助于推动深海工程技术的发展。
2. 可为深水张力腿平台系泊系统的设计和运行提供科学的理论指导,提高平台的可靠性和安全性。
3. 对于深水张力腿平台系泊系统耦合动力特性的深入研究,将为其他海洋平台工程的设计和运行提供借鉴和参考。
四、研究方法本论文的研究方法主要包括实验研究和理论研究两个层面。
1. 实验研究:采用ANSYS软件等相应软件,通过系统仿真来测量并分析深水张力腿平台的系泊系统在受到不同载荷下的响应情况。
2. 理论研究:基于流体力学理论等方面的基础知识,建立深水张力腿平台系泊系统的数学模型,并利用相应的数学方法研究平台在耦合作用下的动态响应特性。
五、预期成果本论文的预期成果主要包括以下几个方面:1. 对深水张力腿平台系泊系统受到不同载荷下的动态响应特性展开深入研究,并建立相应的数学模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
张力腿平台的分类
目前世界上在建和在役的张力腿平台共有24 座,这些张力腿平台的基本工作原理一致,但是 结构形式以及应用方式却各不相同,为了清楚地 区分它们,以下从三个方面对张力腿平台进行分 类。
Page 11
1、按照总体结构分类 可以分为两个大类,即第一代张力腿平台和 第二代张力腿平台; 可以划分为湿树平台和干树平台两大类; 可以分为大载荷张力腿平台、迷你型张力腿 平台、井口张力腿平台三大类;
Page 4
预张力作用在张力腿平台的垂直张力腿系统 上,使张力腿时刻处于受张拉的绷紧状态。较大 的张力腿预张力使平台平面外的运动(横摇、纵 摇和垂荡)较小,近似于刚性。张力腿将平台和 海底固接在一起,为生产提供一个相对平稳安全 的工作环境。
Page 5
张力腿平台本体主要是直立浮筒结构,一般 浮筒所受波浪力的水平方向分力较垂直方向分力 大,因而通过张力腿在平面内的柔性,实现平台 平面内的运动(纵荡、横荡和首摇),即为顺应 式。
Page 6
这样,较大的环境载荷能够通过惯性力来平 衡,而不需要通过结构内力来平衡。张力腿平台 这样的结构形式使得结构具有良好的运动性能。
Page 7
张力腿平台的张力腿系统在初始位置是直立 的,平台的纵荡运动将不引起纵摇,但一般会和 平台的垂向运动相耦合,即纵荡引起垂荡。
在运动过程中没有一个张力腿松弛,它们始终保 持等长度平行状态。如果有任意一个张力腿未校 准,则会破坏这种理想的平衡性质。因此在张力 腿平台的设计中,张腿锚固位置容许的偏差量很 重要。
一座典型的张力腿平台,其垂荡运动的固有周期 为2~4s,而纵横荡运动的固有周期为100~200s; 横摇、纵摇运动固有周期均低于4s,而首摇的运动 固有周期则高于40s。整个结构的频率跨越在海浪的 一阶频率谱两端,从而避免了结构和海浪能量集中的 频率发生共振,使平台结构受力合理,动力性能良好。 迄今为止,张力腿平台有着良好的安全记录,这与结 构设计上的成功是密不可分的。
PagБайду номын сангаас 8
同时,设想使用非平行的张力腿,这样的张力腿 虽然亦可将平台固定于某一空间位置,但不平行 的张力腿必然会在空间相交于一点,这一点将是 平台横荡引起首摇的旋转中心。
Page 9
张力腿平台在张力腿系泊系统张力变化和平台本 体浮力变化控制下,平台平面内的运动固有频率低于 波浪频率,而平面外的运动固有频率高于波浪频率。
Page 14
1、按照总体结构分类-第一代TLP
Heidrun TLP建成于1995年,位 于北海距挪威海岸175km的海域, 工作水深345m。Heidrun TLP是 世界上第一座也是惟一的一座混 凝土张力腿平台。因为其主体构 造采用了混凝土结构,所以主体 排水量远远超过其他钢制张力腿 平台,达到了288000t左右。 Heidrun TLP海底的地质为软黏 土,所以选择了重力式吸力基础, 共有414个独立的基础组成,每 个基础包含19个直径为9m 的高 强度预应力混凝土舱。
Page 2
主要内容
张力腿平台的工作原理及性能 张力腿平台的分类
Page 3
张力腿平台的工作原理及性能
张力腿平台设计最主要的思想是使平台半顺应半 刚性。 它通过自身的结构形式,产生远大于结构自重的 浮力,浮力除了抵消自重之外,剩余部分就称为 剩余浮力,这部分剩余浮力与预张力平衡。
2、按照采油树位置不同分类
3、按照功能和应用方式分类
Page 12
张力腿平台已形成了一种典型的结构形式。 它一般由五大部分组成,分别是 平台上体、
立柱(含横撑和斜撑)、
下体(沉箱)、
张力腿系泊系统
锚固基础
Page 13
图1是一座第一代张力腿平台的总体结构示意图。这种张力腿平台的布局 俯视一般都呈矩形或三角形,平台上体位于水面以上,通过4根或3根立柱 与下体连接,立柱一般为圆柱形结构,是平台波浪力和海流力的主要承受 部件,其主要作用是提供给平台本体必要的结构刚度。 平台的浮力由立柱和位于水面以下的下体浮箱提供。浮箱首尾与各立柱相 接,形成环状结构。由于位于水面以下较深处,所以浮箱受表面波浪力的 影响较小。 张力腿与立柱的数量关系一般是一一对应的,每条张力腿由2~4根张力筋 腱组成,上端固定在平台本体上,下端与海底基座模板相连,或是直接连 接在桩基顶端。有时候为了增加平台系统的侧向刚度,还会安装侧向系泊 索系统,作为垂直张力腿系统的辅助。海底基础将平台固定入位,主要有 桩基或是吸力式基础两种形式。中央井道位于平台本体的中心,可以支持 干树系统,生产立管通过中央井道上与生产设备相接,下与海底油井相接。
Page 15
1996年,Shell石油公司的 Mars TLP在墨西哥海湾 Mississippi Canyon Block 807建成投产,水深905m,海 底倾斜度为1.9%。Mars TLP 的钢结构总质量为36500t,结 构总排水量达到53000t,投资 近10亿美元。Mars TLP的主体 是由Belleli S.P.A.公司在意大 利建造的。张力腿和海底基础 系统由Aker-Gulf Marine公司 承造。
Page 16
第二代张力腿平台出现于20世纪90年代初期,它 是在第一代张力腿平台的基础上发展起来的。第 二代张力腿平台在继承传统类型张力腿平台优良 运动性能和良好经济效益的同时,对结构形式进 行了优化改进,使张力腿平台更适合于深海环境, 并且降低了建造成本。 目前投入生产实践的第二代张力腿平台共分为三 大系列,分别是由Atlantia公司设计的SeaStar系 列张力腿平台、由MODEC公司设计的MOSES系 列张力腿平台以及由ABB公司设计的延伸式张力 腿平台(简称ETLP)。
张力腿平台
TLP
张力腿平台
全球 TLP 的数量并不多,只有 24 座(2008年数 据)。 地区分布:TLP 主要分布在US GOM 地区,有 17 座平台,占总数比例为 70.83%;赤道几内亚 有 4座,所占比例为 16.67%;挪威有 2座;印度 尼西亚有 1座。 尚未发生过倾覆、沉没等重大事故,拥有优良的 工作记录,由此坚定了业界对TLP这种新兴海洋 平台结构的信心。