振动力学1112(A卷)
《振动力学》习题集(含答案)【精选】精心总结

令 引起的静变形为 ,则有:
,即
令 + 引起的静变形为 ,同理有:
得:
则系统的自由振动可表示为:
其中系统的固有频率为:
注意到 与 方向相反,得系统的自由振动为:
1.9质量为m、长为l的均质杆和弹簧k及阻尼器c构成振动系统,如图E1.9所示。以杆偏角 为广义坐标,建立系统的动力学方程,给出存在自由振动的条件。若在弹簧原长处立即释手,问杆的最大振幅是多少?发生在何时?最大角速度是多少?发生在何时?是否在过静平衡位置时?
解:
(1)保持水平位置:
(2)微幅转动:
故:
2.10求图T 2-10所示系统的固有频率,刚性杆的质量忽略不计。
图T 2-10答案图T 2-10
解:
m的位置:
, ,
,
,
2.11图T 2-11所示是一个倒置的摆。摆球质量为m,刚杆质量可忽略,每个弹簧的刚度为 。
(1)求倒摆作微幅振动时的固有频率;
(2)摆球质量m为0.9 kg时,测得频率 为1.5 Hz,m为1.8 kg时,测得频率为0.75 Hz,问摆球质量为多少千克时恰使系统处于不稳定平衡状态?
图E1.2
解:
如图,令 为柱体的转角,则系统的动能和势能分别为:
利用 和 可得:
1.3转动惯量为J的圆盘由三段抗扭刚度分别为 , 和 的轴约束,如图E1.3所示。求系统的固有频率。
图E1.3
解:
系统的动能为:
和 相当于串联,则有:
以上两式联立可得:
系统的势能为:
利用 和 可得:
1.4在图E1.4所示的系统中,已知 ,横杆质量不计。求固有频率。
图E1.4答案图E1.4
解:
对m进行受力分析可得:
振动力学》习题集(含答案)
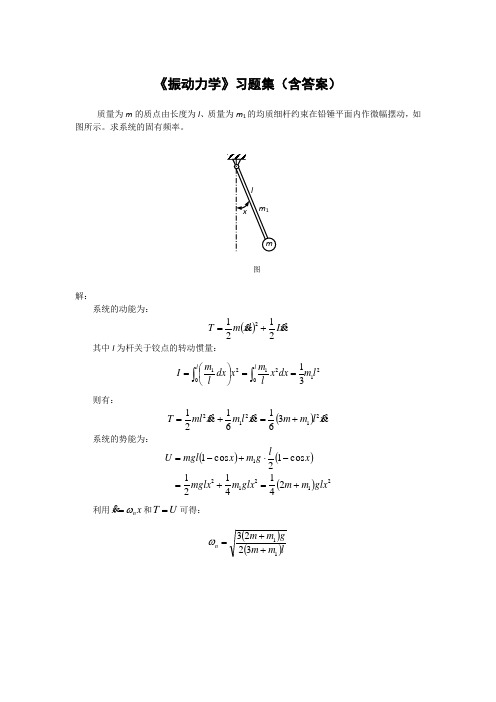
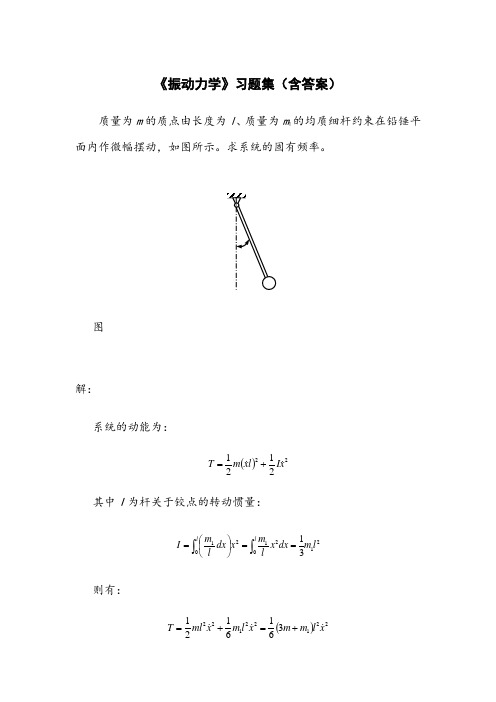
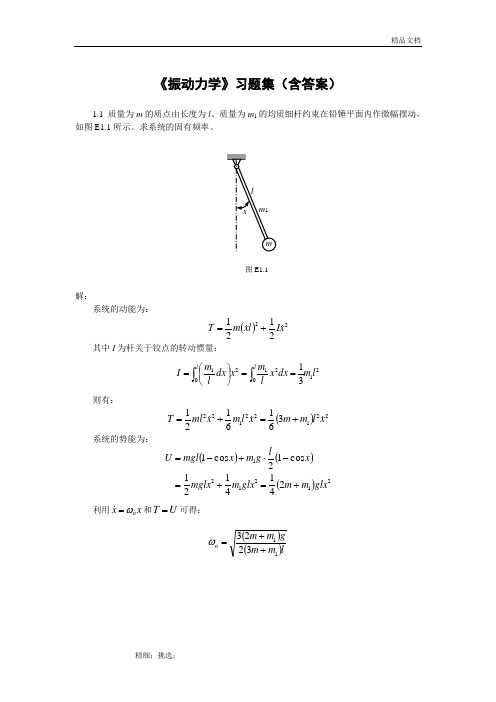
《振动力学》习题集(含答案)质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图所示。
求系统的固有频率。
图解: 系统的动能为:()222121x I l x m T &&+=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T &&&+=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω=&和U T =可得: ()()lm m gm m n 113223++=ω质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图所示。
求系统的固有频率。
图解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ&&&mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn =&和U T =可得: ()mkR a R mR a R k n 343422+=+=ω转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图所示。
求系统的固有频率。
图解: 系统的动能为:221θ&J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn =&和U T =可得: ()()3232132k k J k k k k k n +++=ω在图所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
振动力学(高教版)部分课后习题答案

3c 1 2a mk 1 c 2m n l 3
l mgl k 0 a a , 0 2 2ka2 1.12 面积为 S、质量为 m 的薄板连接于弹簧下端,在粘性流体中振动,如图 E1.12 所示。作用于 mg
薄板的阻尼力为 Fd 2Sv ,2S 为薄板总面积,v 为速度。若测得薄板无阻尼自由振动的周期为 T0 , 在粘性流体中自由振动的周期为 Td 。求系数 。
k2 m x1 k1 c1 m c2 k2 x2 k1
c2
k2 x
m x
m
c2 x
c1 x1
x 1 k1 x x1 c1 x
图 E2.1 解:
答案图 E2.1(a)
答案图 E2.1(b)
等价于分别为 x1 和 x2 的响应之和。先考虑 x1 ,此时右端固结,系统等价为图(a) ,受力为图(b) , 故:
考虑到 x2 t 的影响,则叠加后的 xt 为:
xt
i 1
2
k
Ai ki2 ci2i2 k2 m
2 2 i
1
c c c sin it tg 1 1 2 2i tg 1 i i 2 k1 k2 i m ki c1 c2 i2
ax2 x1 a 2 k1 b 2 k2 mg ab a b2 k1k2
a 2 k1 b 2 k2 1 1 x x0 x3 mg mg 2 k0 a b k1k2 k3
则等效弹簧刚度为:
ke
则固有频率为:
a b2 k1k2k3 2 a 2 k1k3 b 2 k2 k3 a b k1k2
《振动力学》习题集(含问题详解)

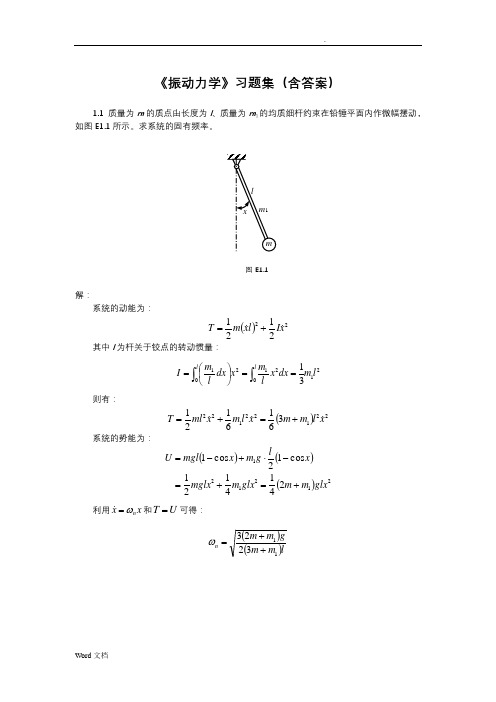
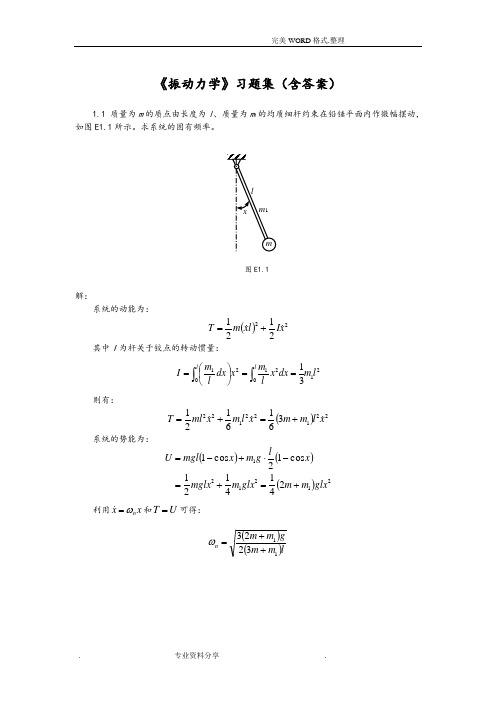
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解: 系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得: ()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解: 系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
《振动力学》作业资料(含答案解析)

《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解:系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得:()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得:()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解:系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222121212121θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
振动力学习题集含答案

解:
,
动量守恒:
,
平衡位置:
,
,
故:
故:
2.4在图E2.4所示系统中,已知m, , , 和 ,初始时物块静止且两弹簧均为原长。求物块运动规律。
图E2.4答案图E2.4
解:
取坐标轴 和 ,对连接点A列平衡方程:
即:
(1)
对m列运动微分方程:
即:
(2)
由(1),(2)消去 得:
图E2.7
解:
,
s=1时共振,振幅为:
(1)
远离共振点时,振幅为:
(2)
由(2)
由(1)
, ,
故:
2.7求图T 2-7中系统的固有频率,悬臂梁端点的刚度分别是 及 ,悬臂梁的质量忽略不计。
图T 2-7答案图T 2-7
解:
和 为串联,等效刚度为: 。(因为总变形为求和)
和 为并联(因为 的变形等于 的变形),则:
图E1.9答案图E1.9
解:
利用动量矩定理得:
,
,
,
,
1.12面积为S、质量为m的薄板连接于弹簧下端,在粘性流体中振动,如图E1.12所示。作用于薄板的阻尼力为 ,2S为薄板总面积,v为速度。若测得薄板无阻尼自由振动的周期为 ,在粘性流体中自由振动的周期为 。求系数 。
图E1.12
解:
平面在液体中上下振动时:
和 为串联(因为总变形为求和),故:
故:
2.9如图T 2-9所示,一质量m连接在一刚性杆上,杆的质量忽略不计,求下列情况系统作垂直振动的固有频率:
(1)振动过程中杆被约束保持水平位置;
(2)杆可以在铅锤平面内微幅转动;
(3)比较上述两种情况中哪种的固有频率较高,并说明理由。
振动力学习题集含答案

解:
利用动量矩定理得:
,
,
,
,
面积为S、质量为m的薄板连接于弹簧下端,在粘性流体中振动,如图所示。作用于薄板的阻尼力为 ,2S为薄板总面积,v为速度。若测得薄板无阻尼自由振动的周期为 ,在粘性流体中自由振动的周期为 。求系数 。
图
解:
平面在液体中上下振动时:
,
,
图所示系统中,已知m,c, , , 和 。求系统动力学方程和稳态响应。
(2)
若取下面为平衡位置,求解如下:
,
图T 2-17所示的系统中,四个弹簧均未受力,k1=k2=k3=k4=k,试问:
(1)若将支承缓慢撤去,质量块将下落多少距离?
(2)若将支承突然撤去,质量块又将下落多少距离?
图T 2-17
解:
(1) ,
(2) ,
如图T 2-19所示,质量为m2的均质圆盘在水平面上可作无滑动的滚动,鼓轮绕轴的转动惯量为I,忽略绳子的弹性、质量及各轴承间的摩擦力,求此系统的固有频率。
因此有:
图所示阶梯杆系统中已知m,ρ,S,E和k。求纵向振动的频率方程。
图
解:
模态函数的一般形式为:
题设边界条件为:
,
边界条件可化作:
,
导出C2= 0及频率方程:
,其中
长为l、密度为ρ、抗扭刚度为GIp的的等直圆轴一端有转动惯量为J的圆盘,另一端连接抗扭刚度为k的弹簧,如图所示。求系统扭振的频率方程。
《振动力学》习题集(含答案)
质量为m的质点由长度为l、质量为m1的均质细杆约束在铅锤平面内作微幅摆动,如图所示。求系统的固有频率。
图
解:
系统的动能为:
其中I为杆关于铰点的转动惯量:
《振动力学》作业资料(含答案解析)
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解:系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得:()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得:()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解:系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222121212121θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
《振动力学》习题集[含答案]
![《振动力学》习题集[含答案]](https://img.taocdn.com/s3/m/bf1e364afad6195f302ba63b.png)
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解:系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得:()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得:()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解:系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222121212121θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
振动力学习题集
《振动力学》习题集(含答案)质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图所示。
求系统的固有频率。
图解:系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图所示。
求系统的固有频率。
图解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn = 和U T =可得:()mkR a R mR a R k n 343422+=+=ω转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图所示。
求系统的固有频率。
图解:系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222121212121θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn = 和U T =可得:()()3232132k k J k k k k k n +++=ω在图所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
《振动力学》习题集(含答案)
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解: 系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得: ()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解: 系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
1112(2)工程力学试题A(11级机电.数48时附答案)

1112 (2)工程力学试题A 卷(试题页)to朱濯宅考前须知:1.请在本页左侧准确填写上班级、姓名和学号;2.所有试题答案填写在答题纸页上,试鹿页上答题无效。
一、选择题(按题意将正确选择填在答题纸页上,2"XI5=300I 、图示结构中()是二力构件。
/仍杆;BC 杆;C7)杆; AB 杆和C 。
杆;2、活动较支座约束力的方向( 沿中心线背离向物体: 沿支承面公法线指向物体:3、平面任意力系,可列出一组( 一个二个顾图)»沿接触面公法线指向物体: 不确定,用正交分力表示:)独立的平衡方程。
三个 四个4、图示F 力作用使重G 的物块处「摩擦临界状态时,己知摩擦因数外.接触面最大摩擦力Ra>G 小的为 <)图。
5、工程实际中把构件抵抗变形的能力称为构件的()» 强度;刚度:力度:承载能力;6、研究构件的变形和破坏规律,对丁•脆性材料来说,破坏是指材料发生了()。
断裂;屈服;断裂或屈服:颈缩;7、低碳钢拉伸实验,有四个阶段,缶£曲线直线局部最高点所对应的应力值称为()。
比例极限。
P ; 屈服点G : 抗拉强度。
b ;8、冷作硬化工艺是将载荷加到低碳钢的()阶段后卸载,重新加载使材料的比例极限提高。
弹性;屈服:强化;缩颈断裂;9、低碳钢拉伸实脸,屈服阶段曲线()所对应的应力值作为材料的屈服点。
最高点:最低点;中间点:10、对于塑性材料,其许用应力[5=().II 、材料的塑性用()来衡量。
Op : Os : Oh : 3:12、图所示三种材料的应力-应变曲线,对其力学性质说法正确的选项是()。
a 强度高,b 刚度大,c 型性好:b 强度高,c 刚度大,a 塑性好:a 强度高,a 刚度大,c 塑性好: 13、空心圆轴扭转时.横截而上正确的切应力分布图为图中的()。
14、圆截面的直径为d.那么该截面的极惯性矩为()。
nd'血4 mV7ul 4加‘4"~32'16~'"iT ;"64-;育15、圆轴的抗扭刚度用()表示。
《振动力学》习题集(含答案解析)
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解:系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得: ()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解:系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
振动力学答案

k1
k1k 2 k1 k2
k 2 ,
k3
k1k 2 k1 k2
,
k
k1k2k4 k2k3k4 k1k2k4
k1k3 k2k3 k1k2 k1k4 k2k4
p2
k1k2k4 k2k3k4 k1k2k4
m(k1k3 k2k3 k1k2 k1k4 k2k4 )
word 文档 可自由复制编辑
振幅。 解:列出平衡方程可得:
word 文档 可自由复制编辑
W
k(st
x)
Q g
w2e sin wt
W g
x
W x kx Q w2esin(wt )
g
g
x kg x Q w2esin(wt ) WW
所以:
Pn
kg W
h Q w2e W
W
又因为
kst即k
W st
将结果代入B
h
4.875cos4.875
当 x =0 时 , 振 幅 最 大 , 此 时 t=0.03s 。 当
t=0.03s 时,x=0.005m)
代入初始条件,得
C1
x0
0, C2
nx0 x0 pd
x0 pd
0.006 ,得
x C2ent sin pd t 物体达到最大振幅时,有
x nC2ent sin pd t C2ent pd cos pd t 0 既得 t = 0.30 s 时,物体最大振幅为 x 0.006 e0.490.3 sin(4.875 0.3) 0.528 cm
撞后一起作自由振动。已知 k =48020 N/m,c
=1960 Ns/m,问重
物在碰撞后多少时
间达到最大振幅?
振动力学考题集[]资料讲解
![振动力学考题集[]资料讲解](https://img.taocdn.com/s3/m/bcbb1c361ed9ad51f01df2db.png)
振动力学考题集[]1、四个振动系统中,自由度为无限大的是()。
A. 单摆;B. 质量-弹簧;C. 匀质弹性杆;D. 无质量弹性梁;2、两个分别为c1、c2的阻尼原件,并连后其等效阻尼是()。
A. c1+c2;B. c1c2/(c1+c2);C. c1-c2;D. c2-c1;3、()的振动系统存在为0的固有频率。
A. 有未约束自由度;B. 自由度大于0;C. 自由度大于1;D. 自由度无限多;4、多自由度振动系统中,质量矩阵元素的量纲应该是()。
A. 相同的,且都是质量;B. 相同的,且都是转动惯量;C. 相同的,且都是密度;D. 可以是不同的;5、等幅简谐激励的单自由度弹簧-小阻尼-质量振动系统,激励频率()固有频率时,稳态位移响应幅值最大。
A. 等于;B. 稍大于;C. 稍小于;D. 为0;6、自由度为n的振动系统,且没有重合的固有频率,其固有频率的数目(A )。
A. 为n;B. 为1;C. 大于n;D. 小于n;7、无阻尼振动系统两个不同的振型u(r)和u(s),u(r)T Mu(s)的值一定()。
A. 大于0;B. 等于0;C. 小于0;D. 不能确定;8、无阻尼振动系统的某振型u(r),u(r)T Ku(r)的值一定()。
A. 大于0;B. 等于0;C. 小于0;D. 不能确定;9、如果简谐激励力作用在无约束振动系统的某集中质量上,当激励频率为无限大时,该集中质量的稳态位移响应一定()。
A. 大于0;B. 等于0;C. 为无穷大;D. 为一常数值;10、相邻固有频率之间的间隔呈近似无限等差数列的振动系统是()。
A. 杆的纵向振动;B. 弦的横向振动;C. 一般无限多自由度系统;D. 梁的横向振动;11、两个刚度分别为k1、k2串连的弹簧,其等效刚度是()。
A. k1+k2;B. k1k2/(k1+k2);C. k1-k2;D. k2-k1;12、无阻尼振动系统两个不同的振型u(r)和u(s),u(r)T Ku(s)的值一定()。
《振动力学》习题集(含答案)
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解: 系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得: ()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解: 系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
振动力学12-13(A卷)
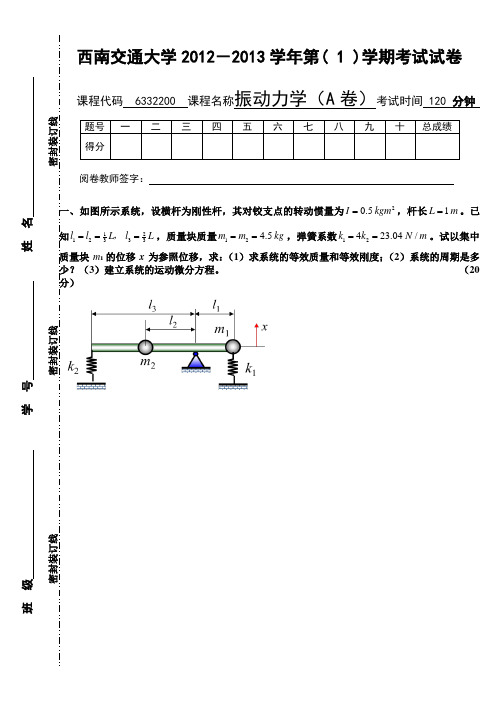
西南交通大学2012-2013学年第( 1 )学期考试试卷课程代码6332200课程名称振动力学(A卷)考试时间120分钟阅卷教师签字:一、如图所示系统,设横杆为刚性杆,其对铰支点的转动惯量为20.5I kgm=,杆长1L m=。
已知1212333l l L l L===,,质量块质量124.5m m kg==,弹簧系数12423.04/k k N m==。
试以集中质量块m1的位移x为参照位移,求:(1)求系统的等效质量和等效刚度;(2)系统的周期是多少?(3)建立系统的运动微分方程。
(20分)班级学号姓名密封装订线密封装订线密封装订线二、横截面面积为A、质量为m的圆柱形浮子,静止在密度为ρ的液体中。
设从静平衡位置压低距离x0,然后无初速地释放,假定阻尼可以忽略不计。
(1)试建立浮子的运动方程;(2)给出浮子的固有频率及初始条件;(3)求浮子自由运动的响应。
(20分)三、如图所示两层楼房,假设各层的等效质量分别为12,m m ,剪切刚度分别为12,k k 。
若已知()2112122,,10/k m m m k k k rad s m=====,试求: (1)系统的运动方程;(2)系统的频率及正则振型; (3)给出系统的解耦运动方程。
(20分)四、已知系统的运动方程为:112233210200012003000010040x x x x x x ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦(1) 假设系统的一阶振型近似为{}110.50.1=x ,采用瑞利商估算系统的基频;(2) 采用矩阵迭代法求系统的基频及振型(精确到小数点后4位),并与瑞利商的计算结果进行比较,两者的相对误差是多少?。
(10分)五、两端自由的等截面均匀直杆,设杨氏模量为E,截面积为A,长为L,材料密度为ρ。
(1)试建立杆纵向自由振动微分方程;(2)列出相应的边界条件;(3)求系统的固有频率。
2008级华南理工大学工程硕士振动力学课试题A
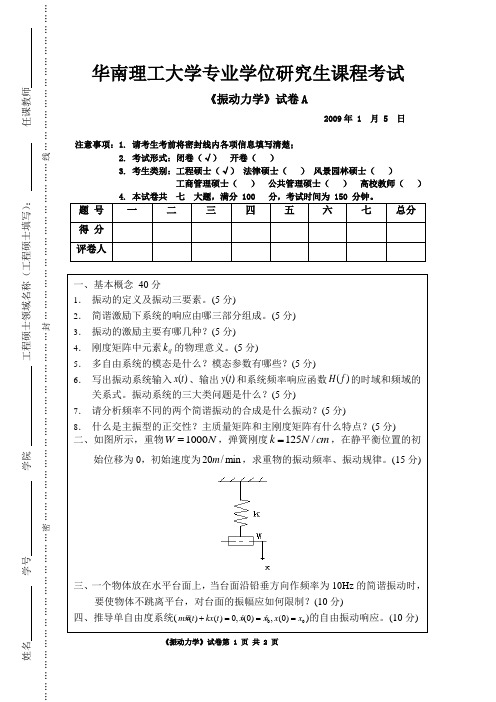
华南理工大学专业学位研究生课程考试
《振动力学》试卷 A
2009 年 1 注意事项:1. 请考生考前将密封线内各项信息填写清楚; 2. 考试形式:闭卷(√) 开卷( ) 3. 考生类别:工程硕士(√) 法律硕士( ) 风景园林硕士( ) 工商管理硕士( ) 公共管理硕士( ) 高校教师( 4. 本试卷共 七 大题,满分 100 分,考试时间为 150 分钟。 月 5 日
学号
学院
三、 一个物体放在水平台面上, 当台面沿铅垂方向作频率为 10Hz 的简谐振动时, 要使物体不跳离平台,对台面的振幅应如何限制?(10 分) 四、推导单自由度系统( mx(t ) kx(t ) 0, x(0) x0 , x(0) x0 )的自由振动响应。(10 分)
《振动力学》试卷第 1 页 共 2 页
姓名
五、建立如图所示系统的运动微分方程并求稳态响应。(10 分)
x c
m k
x1 A sin t
六、写出图示弹簧质量系统运动的作用力方程。 (10 分)
பைடு நூலகம்
七、详细写出求解多自由系统对周期激励的振动稳态响应的思路和步骤。(5 分)
《振动力学》试卷第 2 页 共 2 页
任课教师
)
_____________ ________ 工程硕士领域名称(工程硕士填写) :
题 号 得 分 评卷人
一
二
三
四
五
六
七
总分
一、基本概念 40 分
1. 振动的定义及振动三要素。(5 分) 2. 简谐激励下系统的响应由哪三部分组成。(5 分) 3. 振动的激励主要有哪几种?(5 分) 4. 刚度矩阵中元素 kij 的物理意义。(5 分) 5. 多自由系统的模态是什么?模态参数有哪些?(5 分) 6. 写出振动系统输入 x(t ) 、输出 y(t ) 和系统频率响应函数 H ( f ) 的时域和频域的
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西南交通大学2011-2012学年第( 1 )学期考试试卷
课程代码6332200 课程名称振动力学(A卷)考试时间120 分钟
题号
一
二
三
四
五
六
七
八
总成绩
得分
阅卷教师签字:
一、如图所示振动系统,由一根刚性曲臂、两个质量块、三个弹簧组成。
已知刚性曲臂绕O 点的转动惯量为I0,各弹簧、质量块参数如图所示。
若以刚性曲臂绕O点的转角θ为广义位移,试求
(1)系统的等效广义质量、等效广义刚度;
(2)系统的固有频率、周期;
(3)建立系统的运动微分方程。
(20分)
二、如图所示提升机,已知提升的重物重量为。
重物从某一高度处由静止开始做自由下落
0.1m后突然被卡住,此时钢丝绳的弹簧刚度系数为。
若在卡住前钢丝绳中的力为零,(1)建立系统的运动方程,并给出系统振动的初始条件;
(2)求解质重物的振动规律;
(3)钢丝绳中的最大张力是多少?(15分)
三、一条不可伸长、无质量的绳索通过两个弹簧连接两个质量块,如图所示。
(15分)(1)建立系统的运动微分方程;
(2)求解系统的频率及正则化振型;
(3)若系统的初始条件为,求系统的响应。
四、已知一振动系统的运动方程为
采用矩阵迭代法求系统的前两阶频率和振型。
(15分)
五、一根垂直悬挂的柔性绳子,已知其单位长质量为ρ(kg/m)。
试推导出绳子横向自由运动的微分方程。
(10分)
六、两端自由匀质直梁,截面抗弯刚度为EI,截面积为A,长为L,材料密度为ρ。
若选用为试函数,试用里兹法求系统的前两阶频率。
(15分)
七、简要论述离散系统瑞利商与连续系统瑞利商的区别与联系。
(10分)
八、附加题(10分,本题可做可不做):
在图所示的系统中,已知,L=a+b为常数,不计横杆质量。
(1)试建立系统的运动方程,并求出系统的固有频率和振型;
(2)若以a为变量,求当a为何值时,固有频率取极值,并解释固有频率取极值时系统的运动有什么特征?
(3)若初始时刻,质量块所在位置使得各弹簧均不受力,并无初速释放质量块,求质量块的最大下降位移。