VBSQA Process Simulator一个基于价值的软件过程仿真工具
9款虚拟现实物流仿真软件简介

9款虚拟现实物流仿真软件简介1、FlexsimFlexsim的前身是Taylor II,Flexsim应用深层开发对象,这些对象代表着一定的活动和排序过程。
要想利用模板里的某个对象,只需要用鼠标把该对象从库里拖出来放在模型视窗即可。
每一个对象都有一个坐标(x,y,z)、速度(x,y,z),旋转以及一个动态行为(时间)。
对象可以创建、删除,而且可以彼此嵌套移动,它们都有自己的功能或继承来自其他对象的功能。
这些对象的参数可以把任何制造业、物料处理和业务流程的快速、轻易、高效建模的主要特征描述出来。
不过其宣称的Flexsim内置了虚拟现实浏览窗口,可以让用户添加光源、雾以及虚拟现实立体技术,个人感觉仅是个噱头而已。
2、eM-PlanteM-Plant(原名SIMPLE++)系统规划分析模拟软件,在规划阶段可透过eM-Plant分析全厂之设施规划方案选择、设备投资评估、暂存区、生产线平衡、瓶颈分析、派工模拟及产能分析模拟及企业再造等模拟分析基本上与Witness和Factor/AIM一样,同样属于平面离散系统生产线仿真器。
齐备了周边的机器人仿真器群。
可以与CAD、C APE、ERP、DB等软件之间实时通信。
与周边的机器人仿真器群之间有强有力的关联,面向大型制造业领域的仿真群中,和Delmia公司实力相当。
其主要目的是整体系统的优化等,主要与周边系统联合起来灵活使用。
但是价格昂贵,从周边工具群的联合中脱离出来单独使用时,缺乏魅力。
3、WitnessWitness是英国Lanner Group的产品,是平面离散系统生产线仿真器,操作简单,在低配置计算机上也完全可以灵活使用,是生产线仿真器的老字号,其齐备的基本仿真功能和处理优势,一直是大家所公认的。
作为可选项,还具备了三维立体显示功能(VR),扩大了其适用范围,不过三维立体显示功能是后来添加的可选项,所以不适合模型从大致轮廓的概念设计开始依次建构下去的动态过程中使用。
电气控制模拟仿真新工具PLECS工具箱
电气控制模拟仿真新工具PLECS工具箱随着电气控制技术的快速发展,控制算法和电力电子的性能需要快速、准确的验证和仿真。
在这种情况下,电气控制模拟仿真工具PLECS工具箱成为了一个不可或缺的工具。
本文将介绍PLECS工具箱的功能、特点和应用,以及其对电气控制仿真的贡献。
PLECS工具箱是一种基于MATLAB/Simulink的仿真平台,它专注于电力电子和电气控制领域的仿真。
PLECS工具箱不仅具备Simulink的强大仿真能力,还可以快速实现大规模的仿真,包括模型的建立、仿真、数据处理、实时仿真和代码生成等。
此外,它还具有自适应时间步长控制、鲁棒性分析和并行仿真等高级功能。
PLECS工具箱的主要特点是高效、高精度、易于使用和可扩展。
高效是指PLECS工具箱具备高性能计算能力,可以快速实现大规模的电气控制仿真。
高精度是指PLECS工具箱拥有高精度模型库和高精度仿真算法,能够准确地评估电气控制系统的性能和稳定性。
易于使用是指PLECS工具箱的仿真平台界面友好、功能完善,且是基于MATLAB/Simulink的仿真平台,适合广大电气工程师快速上手。
可扩展是指PLECS工具箱具有开放的API,可以进行二次开发和自定义功能,满足不同场景下复杂电气控制仿真的需求。
在实际应用中,PLECS工具箱主要被应用于电力电子、控制系统、光伏发电和风电发电等领域。
在电力电子领域,PLECS工具箱可用于模拟各种变频器、逆变器、DC/DC转换器和DC/AC逆变器等电力电子控制系统;在控制系统领域,PLECS工具箱可用于模拟PID、模糊控制和神经网络等各种控制算法;在光伏发电和风电发电领域,PLECS工具箱可用于模拟光伏组件、风机系统和能量储存设备的性能。
除了上述应用领域外,PLECS工具箱还被广泛应用于教学和研究领域。
在教学中,PLECS工具箱可以用于电气工程和自动化工程的课程,使学生更深入地理解电气控制仿真技术和工程实践。
在研究领域,PLECS工具箱可以用于电气控制系统的设计、优化和稳定性分析,为工程师和科学家提供更准确、高效的仿真平台。
SimPowerSystems简介
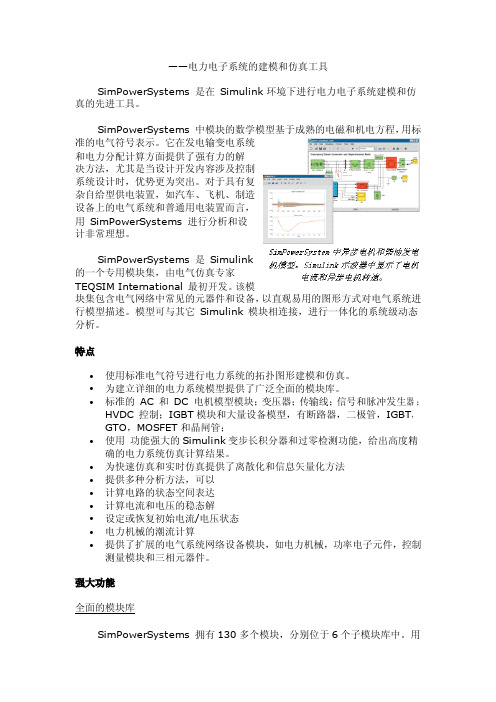
——电力电子系统的建模和仿真工具SimPowerSystems是在Simulink环境下进行电力电子系统建模和仿真的先进工具。
SimPowerSystems中模块的数学模型基于成熟的电磁和机电方程,用标准的电气符号表示。
它在发电输变电系统和电力分配计算方面提供了强有力的解决方法,尤其是当设计开发内容涉及控制系统设计时,优势更为突出。
对于具有复杂自给型供电装置,如汽车、飞机、制造设备上的电气系统和普通用电装置而言,用SimPowerSystems进行分析和设计非常理想。
SimPowerSystems是Simulink的一个专用模块集,由电气仿真专家TEQSIM International最初开发。
该模块集包含电气网络中常见的元器件和设备,以直观易用的图形方式对电气系统进行模型描述。
模型可与其它Simulink模块相连接,进行一体化的系统级动态分析。
特点•使用标准电气符号进行电力系统的拓扑图形建模和仿真。
•为建立详细的电力系统模型提供了广泛全面的模块库。
•标准的AC和DC电机模型模块;变压器;传输线;信号和脉冲发生器;HVDC控制;IGBT模块和大量设备模型,有断路器,二极管,IGBT,GTO,MOSFET和晶闸管;•使用功能强大的Simulink变步长积分器和过零检测功能,给出高度精确的电力系统仿真计算结果。
•为快速仿真和实时仿真提供了离散化和信息矢量化方法•提供多种分析方法,可以•计算电路的状态空间表达•计算电流和电压的稳态解•设定或恢复初始电流/电压状态•电力机械的潮流计算•提供了扩展的电气系统网络设备模块,如电力机械,功率电子元件,控制测量模块和三相元器件。
强大功能全面的模块库SimPowerSystems拥有130多个模块,分别位于6个子模块库中。
用户可以同标准的Simulink模块一起使用建立包含电气系统和控制回路的模型,附加的测量模块可以对电路进行傅立叶分析和三相序列分析。
SimPowerSystems模块库包含下列6个子模块库:•电源AC和DC电压源,受控电压源和受控电流源。
仿真执行程序

仿真模型
对建模方法论提出新的要求,包括但不限于:仿真研究对象越来越复杂,需要研究复杂系统建模 的方法;仿真的精度和可信度要求越来越高,需要研究提高所建立模型的精度方法;同样的仿真 研究对象,在不同仿真系统中要反映出不同的属性,需要在建模时考虑具体的要求,并研究仿真 模型简化、细化、聚合、解聚的方法;仿真模型建立要反映仿真工程性越来越强的变化趋势,强 调仿真建模及其使用工具的标准化;仿真建模人员不仅要考虑建立模型本身的要求,同样需要考 虑验模的要求;建模过程应反映对仿真系统全面的配置、质量管理要求的变化,建立完备的模型 档案,对模型的属性及其建立过程加以记载和科学管理 。
01 简介
03 层次
目录
02 仿真模型 04 设计
简介
简介
仿真执行程序是用仿真语言实现仿真模型的计算机程序,方便人们对系统、事务或流程进行深入 理解。实现仿真执行程序一般需要先建立数学模型;根据研究目的,设计程序框架;用仿真平台 和仿真语言实现和调试程序;如有必要重复上述步骤。仿真执行程序仿真模型进行分类可以连续 仿真执行程序与离散事件仿真执行程序。二者的主要区别是连续系统的数学模型一般可用方程来 加以形式化描述,而离散事件系统的数学模型难以用方程加以形式化描述,往往要用一组逻辑条 件及实体流程图来加以描述。
仿真模型
仿真模型
仿真是基于模型的活动,模型建立、实现、验证、应用是仿真过程不变的主题。随着时代的发展, 仿真模型包含的内容大大扩展,建模方法日益多样,模型交互性和重用性变得越来越重要,模型 的校核与验证的成为仿真中必要的步骤。仿真模型的种类随着被仿真对象的丰富而日益广泛。从 最简单运动方程描述的模型到描述复杂大系统发展变化规律的仿真模型,仿真模型的种类涵盖了 仿真所涉及的各个领域。如此之多的仿真模型,需要研究科学的分类方法,使各种仿真模型能够 归属到一定类别中,对建模和验模方法的选择、仿真模型的管理变得非常重要。仿真模型可以按 照其模拟的对象不同而加以分类,如飞机模型、核反应堆模型,也可以根据仿真模型建立的方法 进行分类,又可以依据其仿真中不同阶段加以分类,如概念模型、数学模型、计算机实现模型等。 随着仿真研究对象的扩展,对仿真模型的分类研究应成为仿真概念研究的一个重要课题,这是进 一步发展仿真理论的需要。
Process Simulate人机仿真

可视性
Human→Vision Envelope
Page 33
可达性设置
Human→Envelope Setup
可达性设置
Page 34
可视性设置
视觉窗口
Human→Vision Window
Page 35
Agenda
Page 36
➢ 课程概述 ➢ 人机仿真
• 人因工程分析
Page 24
创建操作
新建/编辑/删除姿态
姿态库
姿态工具
Button
Option
Default Posture Save Current Posture Create New Posture
Posture Properties Delete Posture(s)
Description
恢复默认姿态 保存当前姿态到姿态库中 新建一个姿态 姿态属性 删除姿态
Description
伸出右手到达指定目标。 伸出右手在选定点抓取目标物体。 伸出右手到达指定目标。 伸出左手在选定点抓取目标物体。 使人看向指定目标。 自动抓取命令。
Page 18
Auto Grasp
左手/右手/双手
抓取方向
抓取物体和位置
Page 19
创建操作
Walk Creator
➢ 操作:选择一个Human,点击Human→Simulate→Walk Creator
Sieme
Task Simulation Builder
Button
Option
Go
Get
Put
Position Regrasp Touch Stand Sit Wait
Description
电路电力电子系统电气控制模拟仿真新工具——PLECS工具箱

提纲引言 (1)绪论 (1)PLECS工具箱 (4)优势 (6)应用领域 (7)客户 (8)竞争产品 (9)使用许可 (10)升级维护 (11)交货 (12)未来产品 (13)引言电气系统的仿真通常采用MATLAB或者SPICE软件,但他们都有各自的缺点。
PLECS是一个运行于Simulink环境下的工具箱,适用于电气系统的仿真。
当被仿真的系统既含有电路部分,又含有复杂的控制方案时,PLECS提供了一个简便的仿真手段。
绪论随着科学技术、仿真理论及计算机的不断发展,仿真技术在不断的提高,在如今的科学研究中,仿真技术大大提高了科学研究水平,缩短了科学研究周期、降低了科学研究成本及风险、促进了各不同领域学科间的融合、加速了科研成果转化为生产力。
现在,越来越多的技术人员采用计算机来对电气系统来进行仿真。
当前适用于电气系统的仿真软件广义上可以分为两大类:电路仿真软件和系统仿真软件。
电路仿真软件以SPICE和SABER为代表。
当技术人员使用这类仿真软件来对电气系统进行仿真时,必须在仿真环境中描述各个电气元件和各个元件之间的电气连接。
对此,人们通常采用网络表(net list)来描述电气系统,或者在仿真软件中绘制电路图来描述电气系统。
仿真软件将以等效的数学模型对电路进行仿真。
虽然使用这类软件可以很方便地对只包含电子电路的电气系统进行仿真,但是这类软件不适用于仿真含有复杂控制结构的电气系统。
系统仿真软件以MA TLAB为代表。
它在科学研究特别是电子信息科学中有着极为广泛的应用。
它的典型使用包括:(1) 数学和计算;(2) 运算法则;(3) 建模、仿真;(4) 数据分析、研究等等。
它的特点在于其强大的矩阵计算能力和丰富的工具箱。
使用系统仿真软件时,电气系统必须采用相应的微分方程或代数方程来描述。
当已知系统的传递函数时,使用系统仿真软件进行仿真是十分方便的。
但是当被仿真的系统含有电路部分,仿真就变得十分困难。
因为如果电路部分以简化的传递函数来表示,则很多细节会被忽略。
Process-Simulate-软件中的装配仿真精选全文
序列编辑器和路径编辑器
表6-2 介绍了路径编辑器工具栏中的可用选项功能。
序列编辑器和路径编辑器
表6-2 介绍了路径编辑器工具栏中的可用选项功能。
角度检测技术
角度的自然基准和圆周封闭原则
1.自然基准:360o圆周角
2.圆周封闭原则:整圆周上所有角间隔的误差之和为零
(圆周内误差封
闭的原理 )
实现 角度和角位移测量的传感器主要有:
S1超前S2π/2
S1滞后S2π/2
序列编辑器和路径编辑器
表6-2 介绍了路径编辑器工具栏中的可用选项功能。
序列编辑器和路径编辑器
表6-2 介绍了路径编辑器工具栏中的可用选项功能。
序列编辑器和路径编辑器
可以选择在路径编辑器表格的列中显示信息的类型, 需要自定义路径表。
1) 单击图标, 显示Customize Columns 对话框, 如图6-11 所示。
如图6-8 所示。
2) 在By Type 选项卡中, 选择要在树中显示的操作类型和细节级
别, 并取消选择不希望显示的操作类型和细节级别, 这可以防止加载
“序列编辑器” 树中可能降低系统性能的不必要实体。
序列编辑器和路径编辑器
3) 要对By Type 选项卡中选定的操作类型应用第二级过滤, 只能
选择与特定资源关联的操作: 在图形查看器或对象树中选择所需的对
2) 在对象树中, 可以看到Engine Assembly 作为一个装配体总成, 它的各个部件组成情况如图
6-12 所示, 一共有6 个分总成部件。
3) 右击操作树中的空白区域, 选择, 新建一个复合操作, 并将其命名为Engine Assembly。
使用Object Flow Operation 创建零件的装配过程
基于Visual Basic 6.0的运动决策测试系统软件设计与实现

基于Visual Basic 6.0的运动决策测试系统软件设计与实现杨静【摘要】In recent years, with the development of science and technology and information technology, all kinds of information software system is widely used in all walks of life in society. With the development of sports, this technology is gradually applied to the sports, to improve the efficiency and accuracy of decision making. This study selected decision fragment fencing competition in the Olympic Games for the material, and the use of Visual Basic 6.0 software development movement decision making test system, the system can always call the game footage, accurate identification of game players decision making a sword at the time, andthe system can automatically records the sword decision speed and the accuracy of the index. The application of this system has high validity and reliability , and it is an ideal tool to evaluate the ability of fencing athletes.%近几年,随着科技和信息技术的发展,各种信息软件系统被广泛应用于社会的各行各业.随着体育事业的发展,这种技术逐渐应用到体育运动中,能够很好的提高体育运动效率和决策准确性.本次研究选取奥运会中击剑比赛的决策片段为素材,并采用Visual Basic 6.0软件开发运动决策测试系统,系统能够随时调用比赛片段,准确的识别比赛中运动员决策出剑的时间,而且系统能够自动记录出剑决策的速度、准确性等指标.此系统的应用具有较高的效度和信度,是评价击剑运动员各种能力的理想工具.【期刊名称】《电子设计工程》【年(卷),期】2017(025)014【总页数】4页(P43-46)【关键词】VisualBasic6.0;运动决策测试系统;软件设计;实现【作者】杨静【作者单位】陕西国际商贸学院陕西西安 712046【正文语种】中文【中图分类】TN99Visual Basic程序设计是一种比较好的计算机软件设计课程,被广泛应用于软件设计中,为网络信息化环境下系统软件的设计提供了一个更加科学、全面的的方式。
软件测试与质量保证考试 选择题 55题

1. 软件测试的主要目的是什么?A. 证明软件没有错误B. 发现软件中的错误C. 提高软件的性能D. 增加软件的功能2. 下列哪项不是软件测试的类型?A. 单元测试B. 集成测试C. 性能测试D. 设计测试3. 黑盒测试主要关注什么?A. 软件的内部逻辑B. 软件的外部功能C. 软件的性能D. 软件的代码4. 白盒测试主要关注什么?A. 软件的内部逻辑B. 软件的外部功能C. 软件的性能D. 软件的代码5. 下列哪项是静态测试的例子?A. 代码审查B. 单元测试C. 集成测试D. 系统测试6. 下列哪项是动态测试的例子?A. 代码审查B. 单元测试C. 文档审查D. 设计审查7. 软件测试的生命周期包括哪些阶段?A. 计划、设计、执行、评估B. 设计、编码、测试、部署C. 需求、设计、编码、测试D. 需求、设计、编码、部署8. 下列哪项不是测试用例的组成部分?A. 前置条件B. 测试步骤C. 预期结果D. 测试环境9. 下列哪项是回归测试的目的?A. 发现新的错误B. 验证已修复的错误C. 提高软件性能D. 增加软件功能10. 下列哪项是冒烟测试的目的?A. 发现新的错误B. 验证软件的基本功能C. 提高软件性能D. 增加软件功能11. 下列哪项是性能测试的例子?A. 负载测试B. 单元测试C. 集成测试D. 系统测试12. 下列哪项是安全测试的例子?A. 渗透测试B. 单元测试C. 集成测试D. 系统测试13. 下列哪项是兼容性测试的例子?A. 浏览器兼容性测试B. 单元测试C. 集成测试D. 系统测试14. 下列哪项是可用性测试的例子?A. 用户界面测试B. 单元测试C. 集成测试D. 系统测试15. 下列哪项是压力测试的例子?A. 高负载测试B. 单元测试C. 集成测试D. 系统测试16. 下列哪项是配置测试的例子?A. 硬件配置测试B. 单元测试C. 集成测试D. 系统测试17. 下列哪项是安装测试的例子?A. 软件安装测试B. 单元测试C. 集成测试D. 系统测试18. 下列哪项是恢复测试的例子?A. 系统故障恢复测试B. 单元测试C. 集成测试D. 系统测试19. 下列哪项是可靠性测试的例子?A. 系统稳定性测试B. 单元测试C. 集成测试D. 系统测试20. 下列哪项是文档测试的例子?A. 用户手册测试B. 单元测试C. 集成测试D. 系统测试21. 下列哪项是探索性测试的例子?A. 自由测试B. 单元测试C. 集成测试D. 系统测试22. 下列哪项是自动化测试的例子?A. 使用测试工具B. 手动测试C. 代码审查D. 设计审查23. 下列哪项是手动测试的例子?A. 使用测试工具B. 手动执行测试用例C. 代码审查D. 设计审查24. 下列哪项是测试管理工具的例子?A. JIRAB. EclipseC. Visual StudioD. Notepad++25. 下列哪项是缺陷跟踪工具的例子?A. BugzillaB. EclipseC. Visual StudioD. Notepad++26. 下列哪项是测试执行工具的例子?A. SeleniumB. EclipseC. Visual StudioD. Notepad++27. 下列哪项是性能测试工具的例子?A. LoadRunnerB. EclipseC. Visual StudioD. Notepad++28. 下列哪项是安全测试工具的例子?A. NessusB. EclipseC. Visual StudioD. Notepad++29. 下列哪项是兼容性测试工具的例子?A. BrowserStackB. EclipseC. Visual StudioD. Notepad++30. 下列哪项是可用性测试工具的例子?A. UserZoomB. EclipseC. Visual StudioD. Notepad++31. 下列哪项是压力测试工具的例子?A. JMeterB. EclipseD. Notepad++32. 下列哪项是配置测试工具的例子?A. TestCompleteB. EclipseC. Visual StudioD. Notepad++33. 下列哪项是安装测试工具的例子?A. InstallShieldB. EclipseC. Visual StudioD. Notepad++34. 下列哪项是恢复测试工具的例子?A. VMwareB. EclipseC. Visual StudioD. Notepad++35. 下列哪项是可靠性测试工具的例子?A. QAlibraB. EclipseC. Visual StudioD. Notepad++36. 下列哪项是文档测试工具的例子?A. MadCap FlareB. EclipseC. Visual StudioD. Notepad++37. 下列哪项是探索性测试工具的例子?A. SquishB. EclipseC. Visual StudioD. Notepad++38. 下列哪项是自动化测试工具的例子?A. TestCompleteB. EclipseC. Visual StudioD. Notepad++39. 下列哪项是手动测试工具的例子?A. TestRailB. EclipseD. Notepad++40. 下列哪项是测试管理工具的例子?A. ZephyrB. EclipseC. Visual StudioD. Notepad++41. 下列哪项是缺陷跟踪工具的例子?A. FogBugzB. EclipseC. Visual StudioD. Notepad++42. 下列哪项是测试执行工具的例子?A. TestLinkB. EclipseC. Visual StudioD. Notepad++43. 下列哪项是性能测试工具的例子?A. LoadNinjaB. EclipseC. Visual StudioD. Notepad++44. 下列哪项是安全测试工具的例子?A. AcunetixB. EclipseC. Visual StudioD. Notepad++45. 下列哪项是兼容性测试工具的例子?A. CrossBrowserTestingB. EclipseC. Visual StudioD. Notepad++46. 下列哪项是可用性测试工具的例子?A. UserTestingB. EclipseC. Visual StudioD. Notepad++47. 下列哪项是压力测试工具的例子?A. LoadViewB. EclipseD. Notepad++48. 下列哪项是配置测试工具的例子?A. RanorexB. EclipseC. Visual StudioD. Notepad++49. 下列哪项是安装测试工具的例子?A. Wise Installation SystemB. EclipseC. Visual StudioD. Notepad++50. 下列哪项是恢复测试工具的例子?A. Veeam Backup & ReplicationB. EclipseC. Visual StudioD. Notepad++51. 下列哪项是可靠性测试工具的例子?A. QAliberB. EclipseC. Visual StudioD. Notepad++52. 下列哪项是文档测试工具的例子?A. Adobe FrameMakerB. EclipseC. Visual StudioD. Notepad++53. 下列哪项是探索性测试工具的例子?A. TestuffB. EclipseC. Visual StudioD. Notepad++54. 下列哪项是自动化测试工具的例子?A. Ranorex StudioB. EclipseC. Visual StudioD. Notepad++55. 下列哪项是手动测试工具的例子?A. PractiTestB. EclipseD. Notepad++答案:1. B2. D3. B4. A5. A6. B7. A8. D9. B10. B11. A12. A13. A14. A15. A16. A17. A18. A19. A20. A21. A22. A23. B24. A25. A26. A27. A28. A29. A30. A31. A32. A33. A34. A35. A36. A37. A38. A39. A40. A41. A42. A43. A44. A45. A46. A47. A48. A49. A50. A51. A52. A53. A54. A55. A。
Process Simulate装配仿真
产 品 Product 工 艺 Process 工 厂 Plant 资 源 Resource
Product
❖产品
◆ 需要进行制造的零件和装配
❖工艺
◆ 制造零件和装配的步骤
❖工厂
◆ 支持制造工艺所用到的工厂结构
❖资源
◆ 零件和装配工艺所必须的物理设备
Process
工艺清单(工艺结构树) BOP:Bill Of Process
新建干涉设置
➢ 操作:Collision Viewer中点击
注:干涉检查是检查“Check”对象栏与“With”对象栏中的对象在仿真过程中是否有干涉。
Page 18
编辑干涉设置
➢ 操作:Collision Viewer中选择需要编辑的干涉设置,点击
➢ 操作:在Collision Set窗口中点击属性单元格更改名字和干涉检查精度
➢ 在时序编辑器中直接拖动工序至需要放置的位置。
Page 30
时序编辑器
链接工序
➢ 在时序编辑器选择需要链接的两个工序,点击Link 。 ➢ 或者在甘特图中点击鼠标左键不放连接两个工序。
Page 31
时序编辑器
断开链接
➢ 在时序编辑器选择需要断开链接的两个工序,点击Unlink 。 ➢ 或者在甘特图点选链接箭头后按Delete删除。
等测量特征。
Page 7
Agenda
Page 8
➢ 课程概述 ➢ 装配仿真
• 装配仿真
➢ 装配仿真实例 ➢ 装配仿真练习
组合工序(Compound Operation)
组合工序:Operation→New Operation→
操作的名称 工序归属
Page 9
装配工序(Object Flow)
Process Simulate 机器人仿真

机器人搬运实例
进行仿真,查看是否存在干涉
Page 33
机器人搬运实例
利用路径规划工具,调整运行路径,避开干涉
Page 34
Agenda
Page 35
➢ 课程概述 ➢ 机器人仿真 ➢ 机器人仿真实例
• 机器人外部轴实例
➢ 机器人仿真练习
机器人外部轴实例
打开Arc 7th Axis Study: File→Disconnected Study→Open In Standard Mode
Page 22
➢ 课程概述 ➢ 机器人仿真
• 点焊 ➢ 机器人仿真实例 ➢ 机器人仿真练习
焊点查看
➢ 点击View→Viewers→Mfg Viewer
Page 23
勾选: Projection Indication和Assignment Indication
焊点投影
➢ 选取工序或焊点,点击Process→Project Weld Points
Page 6
机构操作
Robot Jog:选取一个机器人,点击Robot→ Robot Jog
Page 7
Agenda
Page 8
➢ 课程概述 ➢ 机器人仿真
• 工具操作 ➢ 机器人仿真实例 ➢ 机器人仿真练习
安载/卸载工具
Mount Tool:
选择机器人,点击 ,或在右键弹出菜单中选择
Unmount Tool:
Page 36
机器人外部轴实例
装载工具: 选择机器人,点击 ,或在右键弹出菜单中选择
Page 37
机器人外部轴实例
添加外部轴:
Page 38
机器人外部轴实例
将机器人连接到滑块上,使机器人随第7轴一起运动
Process Simulate 概述
对象重命名
Page 44
对象操作
复制:
选择对象,点击Home菜单栏的 剪切: 选择对象,点击Home菜单栏的 删除: 选择对象,点击Home菜单栏的
和 进行复制粘贴,或通过快捷键Ctrl+C和Ctrl+V来复制粘贴 进行剪切,或通过快捷键Ctrl+X 进行删除,或通过快捷键Delete,或选择对象在右键弹出菜单中选择Delete
Page 52
X轴方向的个数 X轴方向的间距
预览
位置调整工具
“放置”选项允许您在工程数据中移动和定位选定的组件。
Button
Option
Placement Manipulator 手动定位
Relocate 重定位
Fast Placement 快速定位
Restore Position 恢复位置
Description 能够在工程数据中移动和旋转所选对象。 使用户能够重新定位对象。 允许用户仅沿着线性X和Y轴移动对象。 用户能够将对象相对于其父对象还原到其原始位置。
Description 测量曲线的长度。
测量角度,第一点为原点,第二第三点为线上的点,即 第一点到第二点构成一线,第一点到第三点构成一线, 测量的是两线之间的角度。 更改创建的测量线的颜色。
Page 63
剖截面
Button
Option New Section Plane New Section Volume
Display Only the Selected Objects
仅显示被选择的对象
Display All 显示所有对象
Toggle Display 切换显示
Display By Type 按对象类型显示
bpm仿真原理
bpm仿真原理一、BPM简介业务流程管理(Business Process Management,简称BPM)是一种管理方法,旨在通过识别、优化和自动化企业内部的业务流程,提高企业的运作效率和竞争力。
BPM涵盖了流程设计、实施、监控和改进等多个方面,已经成为现代企业管理体系的重要组成部分。
二、BPM仿真原理BPM仿真是指利用计算机技术模拟和分析业务流程,以便更好地理解、优化和调整流程。
BPM仿真基于系统动力学、人工神经网络、遗传算法等理论和方法,通过构建数学模型,模拟实际业务流程的运行情况,为企业提供决策依据。
三、BPM仿真方法1.离线仿真:在计算机上模拟业务流程,分析流程在不同条件下的运行效果,为流程优化提供参考。
2.实时仿真:通过实际运行数据,实时监控和分析业务流程,实现对流程的动态调整。
3.混合仿真:结合离线仿真和实时仿真,充分发挥两者的优势,提高流程管理的综合效果。
四、仿真工具与技术市面上有许多成熟的BPM仿真工具,如Tecnomatix、AnyLogic等。
这些工具具有丰富的功能,可以满足企业对业务流程建模、仿真和优化等方面的需求。
此外,新兴技术如大数据、云计算和人工智能等也为BPM仿真提供了强大的支持,使得企业能够更加高效地实施和管理业务流程。
五、应用场景和优势1.生产制造:通过BPM仿真,企业可以分析生产线的产能、瓶颈和调度策略,实现生产过程的优化。
2.供应链管理:BPM仿真可以帮助企业评估供应链各环节的性能,降低库存成本,提高物流效率。
3.客户服务:通过仿真客户服务流程,企业可以发现潜在的客户需求和满意度改进点,提升客户体验。
六、结论与展望BPM仿真技术在企业业务流程管理中具有广泛的应用前景。
电气控制模拟仿真新工具-PLECS工具箱
提纲引言 (1)绪论 (1)PLECS工具箱 (4)优势 (6)应用领域 (7)客户 (8)竞争产品 (9)使用许可 (10)升级维护 (11)交货 (12)未来产品 (13)引言电气系统的仿真通常采用MATLAB或者SPICE软件,但他们都有各自的缺点。
PLECS是一个运行于Sinmlink环境下的工具箱,适用于电气系统的仿真。
当被仿真的系统既含有电路部分,又含有复杂的控制技术方案时,PLECS提供了一个简便的仿真手段。
随着科学技术、仿貞•理论及汁算机的不断发展,仿頁•技术在不断的提髙,在如今的科学研究中,仿真技术大大提高了科学研究水平,缩短了科学研究周期、降低了科学研究成本及风险、促进了各不同领域学科间的融合、加速了科研成果转化为生产力。
现在,越来越多的技术人员采用计算机来对电气系统来进行仿真。
当前适用于电气系统的仿真软件广义上可以分为两大类:电路仿真软件和系统仿真软件。
电路仿真软件以SPICE和SABER为代表。
当技术人员使用这类仿真软件来对电气系统进行仿真时,必须在仿真环境中描述各个电气元件和各个元件之间的电气连接。
对此,人们通常采用网络表(net list)来描述电气系统,或者在仿真软件中绘制电路图来描述电气系统。
仿貞•软件将以等效的数学模型对电路进行仿真。
虽然使用这类软件可以很方便地对只包含电子电路的电气系统进行仿真,但是这类软件不适用于仿真含有复杂控制结构的电气系统。
系统仿真软件以MATLAB为代表。
它在科学研究特别是电子信息科学中有着极为广泛的应用。
它的典型使用包括:(1)数学和计算;⑵运算法则:(3)建模、仿真;⑷ 数据分析、研究等等。
它的特点在于其强大的矩阵计算能力和丰富的工具箱。
使用系统仿真软件时,电气系统必须采用相应的微分方程或代数方程来描述。
当已知系统的传递函数时,使用系统仿真软件进行仿貞•是十分方便的。
但是当被仿貞•的系统含有电路部分,仿真就变得十分困难。
因为如果电路部分以简化的传递函数来表示,则很多细节会被忽略。
网络仿真软件介绍
主流网络仿真软件简介
SPW具有以下技术特点:
高效便捷的仿真手段:它用 C 语言开发,仿真效率高,同时,他提供图形化的配置
仿真界面,友好的消息显示机制。而且可以在不需要用户干预的情况下进行多速率、 动态调度的仿真处理。 多种建模方式支持:只要是 C/C++兼容的建模,系统都可以提供支持,其建模参数 可以是 C 兼容的变量表达式语言定义的复杂函数。 大规模的标准数据模型,可支持 XML、关系数据库,并提供 TCL、C++等编程接口。 丰富的构件库,并支持在原有构件库上的编程微调,直接提供 C 源码的编辑和编译 环境。 强大的分析和管理工具,可自动生成信噪比曲线,误码率曲线等。 提供从系统建模到芯片级硬件设计的自动化功能。
OPNET
OPNET Modeler主要面向于研发,主要功能体现在以下四个方面:
-设备的研发:一些设备制造商,如3com,Cisco等,在新的设备投入
市场之前,需要将其模型放到OPNET的虚拟网络环境中进行验证。
-协议的研发:用于开发用户需要的,或者下一代的通信协议,如
IPV6,并且仿真其性能。 -网络的研发:用于分析有线/无线设备组网以后的整体性能与特定参 数。 -业务的研发:开发新型的业务模式。
主流网络仿真软件比较
MATLAB 界面友好性 拓扑结构配置 支持的构件库 配置灵活性 执行效率 支持语言 可扩展性 兼容性 主要应用 使用成本 入门难度 代码 代码 丰富的工具箱 比较灵活 低 C/FORTRAN 比较好 一般 科学计算、矩阵运 算 较高 一般 SPW GUI、代码 GUI、代码 丰富的构件库 比较灵活 一般 C/HDL 比较好 与MATLAB兼容 DSP、无线通信、 链路层 高 难 OPNET GUI、代码 GUI、配置方便 丰富的构件库 一般 较高 Proto-C 差 差 网络路由仿真 高 难度大 NS-2 TCL NSG/Nsbench、代 码 丰富的组件模块 非常灵活 较高 C++/OTcl 好 一般 网络协议仿真、IP 网络 开源免费 较难
Sentaurus Process 中文介绍及使用

§17-1 新一代集成工艺仿真系统Sentaurus Process随着集成电路制造工艺技术的迅速发展和日趋成熟,集成电路的集成度迅速攀升,制造流程及工艺步骤也日趋复杂。
当前,硅集成电路制造工艺技术已经达到了纳米级水平,纳米电子学不断深入发展的前提是基于能够达到纳米精度的制造技术【1】。
反过来,纳米级器件的设计与研发则必须有相应的高精度工艺级仿真软件来支持。
通常,对于大尺寸器件(通常特指分立器件),由诸多工艺因素造成的层间界面应力、杂质分布蠕动、空间量子效应及载流子非线性输运等小尺寸效应[2]均可被忽略。
而对于小尺寸(泛指超大规模集成电路中的集成化器件)器件,准确地预期及评价工艺制程后的良品率、实现其所谓的工艺级可制造性设计,则必须充分地考虑小尺寸效应。
新一代集成工艺设计工具Sentaurus Process恰恰解决了纳米尺度的可制造性设计技术难题,成为当前最为先进的集成电路工艺级仿真工具。
§17-1-1 Sentaurus Process工艺级仿真工具简介[3]Sentaurus Process是Synopsys Inc.最新推出的新一代TCAD工艺级仿真工具,被业界誉为第五代集成电路制程级仿真软件,是当前最为先进的纳米级集成工艺仿真工具。
Sentaurus Process是迄今为止集成电路制程级仿真软体中最为全面、最为灵活的多维(一维、二维、三维)工艺级仿真工具。
Sentaurus Process面向当代纳米级集成电路工艺制程,全面支持小尺寸效应的仿真与模拟,用于实现甚大规模(ULSI)集成电路的工艺级虚拟设计,可显著地缩短集成电路制造工艺级设计、工艺级优化乃至晶圆芯片级产品的开发周期。
Sentaurus Process整合了Avanti的TSUPREM系列工艺级仿真工具、Taurus Process系列工艺级仿真工具及ISE的Dios系列工艺级仿真工具,将一维、两维和三维仿真集成于同一平台,在保留传统工艺级仿真工具卡命令行运行模式的基础上,又作了诸多重大改进:1.增加、设置了模型参数数据库浏览器(PDB),为用户提供修改模型参数及增加模型的方便途径;2. 增加、设置了一维模拟结果输出工具(Inspect)和二维、三维模拟结果输出工具(Tecplot SV)。