交流永磁讲义同步伺服电机及驱动技术(精)
交流永磁同步伺服电机的工作原理

交流永磁同步伺服电机的工作原理朋友,今天咱们来聊聊交流永磁同步伺服电机这个超酷的东西。
你知道吗?交流永磁同步伺服电机就像是一个特别听话又超级能干的小助手呢。
它的核心部分有永磁体,这永磁体就像一个有着超强魔力的小磁铁,一直稳稳地待在电机里,散发着自己独特的魅力。
当我们给这个电机通上交流电的时候呀,就像是给这个小助手下达了开始工作的指令。
交流电会在电机的定子绕组里产生一个旋转的磁场,这个磁场就像一个看不见的大手,开始挥舞起来。
而那个永磁体呢,它可是个很有个性的家伙,它在这个旋转磁场的影响下,就想跟着一起动起来。
为啥呢?因为异性相吸,同性相斥呀,这个磁场的力量对永磁体有着很强的吸引力和排斥力。
你想象一下,这个永磁体就像是一个小舞者,而那个旋转磁场就是音乐的节奏。
小舞者要根据音乐的节奏来跳舞,永磁体就得按照旋转磁场的节奏来转动。
而且呀,它们配合得可好了,永磁体转动的速度和旋转磁场的速度基本上是同步的,这就是为啥叫永磁同步伺服电机啦。
这个电机的工作可不仅仅是这么简单地转一转哦。
它还特别聪明,能够根据我们的需求来精确地控制转动的角度、速度和扭矩呢。
比如说,在一些自动化的生产线上,我们需要这个电机把某个零件精确地送到某个位置,它就能做到。
这就好比你告诉一个特别机灵的小朋友,把这个小玩具放到那个小盒子里,他就能准确地完成任务。
在这个过程中呀,电机的控制系统就像是一个智慧的大脑。
它会时刻监测电机的运行状态,看看永磁体是不是按照我们想要的速度和角度在转动。
如果有一点点偏差,这个智慧的大脑就会马上调整,就像一个严格的老师,一旦发现学生的动作不标准,就立刻纠正。
交流永磁同步伺服电机在很多地方都发挥着巨大的作用呢。
在机器人的关节处,它就像是机器人的肌肉和关节的完美结合,让机器人能够灵活地做出各种动作,就像一个舞者在舞台上翩翩起舞。
在数控机床里,它又像一个超级精确的工匠,能够把零件加工得非常精细,一丝一毫的差错都不会有。
而且哦,这个电机还有一个很贴心的地方呢。
永磁同步伺服电机(PMSM)的基本结构 和控制单元驱动器原理

永磁同步伺服电机(PMSM)的基本结构和控制单元驱动器原理导语:永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。
全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。
随着现代电机技术、现代电力电子技术、微电子技术、永磁材料技术、交流可调速技术及控制技术等支撑技术的快速发展,使得永磁交流伺服技术有着长足的发展。
永磁交流伺服系统的性能日渐提高,价格趋于合理,使得永磁交流伺服系统取代直流伺服系统尤其是在高精度、高性能要求的伺服驱动领域成了现代电伺服驱动系统的一个发展趋势。
永磁交流伺服系统具有以下等优点:电动机无电刷和换向器,工作可靠,维护和保养简单;定子绕组散热快;惯量小,易提高系统的快速性;适应于高速大力矩工作状态;相同功率下,体积和重量较小,广泛的应用于机床、机械设备、搬运机构、印刷设备、装配机器人、加工机械、高速卷绕机、纺织机械等场合,满足了传动领域的发展需求。
永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。
全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。
现在,高性能的伺服系统,大多数采用永磁交流伺服系统其中包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。
伺服驱动器有两部分组成:驱动器硬件和控制算法。
控制算法是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分,也是在技术垄断的核心。
交流永磁伺服系统的基本结构交流永磁同步伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件组成,其结构组成如图1所示。
其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等等。
永磁同步伺服电机驱动器原理

永磁同步伺服电机驱动器原理永磁同步电机是一种无刷直流电机,它具有良好的动态响应、高效率和高扭矩密度。
它由一个转子和一个固定的定子组成。
转子上带有永磁体,而定子上带有绕组。
当电流通过定子绕组时,会在转子上产生一个磁场,从而产生转矩。
首先,功率电子器件用于将输入电源的直流电转换为可控制的交流电。
常见的功率电子器件有三相桥式整流器和三相桥式逆变器。
三相桥式整流器可以将输入的三相交流电转换为直流电,而三相桥式逆变器则可以将输入的直流电转换为控制的三相交流电。
其次,控制电路负责生成适当的控制信号来控制功率电子器件的开关状态。
控制电路通常由微处理器或DSP(数字信号处理器)组成,它接收来自传感器的反馈信号,并根据预先设定的控制算法生成控制信号。
最后,传感器反馈用于实时监测电机的位置和速度,并将这些信息发送给控制电路。
常用的传感器包括光电编码器、霍尔传感器和电流传感器。
光电编码器可以测量电机转子的位置,霍尔传感器可以检测磁场偏差,而电流传感器可以测量电机的电流。
在实际应用中,永磁同步伺服电机驱动器通常采用闭环控制系统。
闭环控制意味着控制电路会不断地检测电机的实际位置和速度,并与预期位置和速度进行比较。
如果存在误差,控制电路会调整功率电子器件的开关状态来纠正误差,并使实际位置和速度接近预期值。
总之,永磁同步伺服电机驱动器通过功率电子器件、控制电路和传感器反馈来实现对永磁同步电机转速和位置的控制。
它具有高效率、高响应和高精度的特点,被广泛应用于自动化领域,如机床、印刷设备和机器人等。
永磁同步伺服电动机工作原理

永磁同步伺服电动机工作原理永磁同步伺服电动机(Permanent Magnet Synchronous Servo Motor,简称PMSM)是一种利用永磁体产生磁场与电流产生磁场之间的相互作用来实现转动的电动机。
它具有高效率、高功率密度、高控制精度等优点,在众多领域得到了广泛应用。
PMSM的工作原理可以简单概括为:通过在转子上安装永磁体,使得转子具有永久磁性,而在定子上通过绕组通以交流电流,产生旋转磁场。
转子上的永磁体与定子上的旋转磁场之间产生磁力作用,从而使得转子转动。
同时,通过改变定子绕组的电流,可以实现对电机的速度和力矩的精确控制。
PMSM的转子通常由两种类型的永磁体组成:永磁体沿轴向排列的表面永磁体和沿轴向排列的内部永磁体。
这两种类型的永磁体都可以产生强大的磁场,从而使得电机具有较高的输出功率。
PMSM中的转子磁场与定子磁场之间的相互作用可以通过反电动势来实现。
当定子绕组中的电流改变时,会产生反电动势。
这个反电动势与转子磁场的相对运动速度成正比,反电动势与转子磁场之间的相对运动速度的方向相反。
因此,通过检测反电动势的大小和方向,可以获得转子位置和速度信息,并实现对电机的精确控制。
PMSM的控制系统通常采用矢量控制技术,即通过控制定子绕组中的电流矢量来实现电机的转速和力矩的精确控制。
矢量控制技术可以将电机的转子磁场与定子磁场的相对运动速度的大小和方向进行精确控制,从而实现对电机的高效率控制。
PMSM的工作原理可以通过以下步骤进行简单说明:1. 通过外部电源将交流电流输入到定子绕组中,产生旋转磁场;2. 定子绕组中的交流电流会产生一个旋转磁场,这个旋转磁场与转子上的永磁体之间产生磁力作用;3. 磁力作用使得转子开始转动,转动的速度和方向与定子绕组中的电流有关;4. 通过改变定子绕组中的电流,可以改变磁力的大小和方向,从而改变转子的转动速度和方向;5. 反电动势的检测可以获得转子位置和速度信息,通过控制定子绕组中的电流矢量,可以实现对电机的精确控制。
伺服系统基础知识资料

交流永磁同步伺服驱动系统一、伺服系统简介伺服来自英文单词Servo,指系统跟随外部指令进行人们所期望的运动,运动要素包括位置、速度和力矩。
伺服系统的发展经历了从液压、气动到电气的过程,而电气伺服系统包括伺服电机、反馈装置和控制器。
在20世纪60年代,最早是直流电机作为主要执行部件,在70年代以后,交流伺服电机的性价比不断提高,逐渐取代直流电机成为伺服系统的主导执行电机。
交流永磁同步伺服驱动系统(以下简称伺服系统),是基于国外高端伺服技术开发出适合于国内环境的伺服驱动系统,具有性能优异、可靠性强,广泛应用于数控机床、织袜机械、纺织机械、绣花机、雕刻机械等领域,在这些要求高精度高动态性能以及小体积的场合,应用交流永磁同步电机(PMSM)的伺服系统具有明显的优势。
其中,PMSM具备十分优良的低速性能、可以实现弱磁高速控制,调速范围宽广、动态特性和效率都很高。
交流伺服系统的性能指标可以从调速范围、定位精度、稳速精度、动态响应和运行稳定性等方面来衡量。
伺服系统调速范围一般的在1:5000~1:10000;定位精度一般都要达到±1个脉冲;稳速精度,尤其是低速下的稳速精度,比如给定1rpm时,一般的在±0.1rpm以内,高性能的可以达到±0.01rpm以内;动态响应方面,通常衡量的指标是系统最高响应频率,即给定最高频率的正弦速度指令,系统输出速度波形的相位滞后不超过90°或者幅值不小于50%。
应用在特定要求高的一些场合,目前国内主流产品的频率在200~500Hz。
运行稳定性方面,主要是指系统在电压波动、负载波动、电机参数变化、上位控制器输出特性变化、电磁干扰、以及其他特殊运行条件下,维持稳定运行并保证一定的性能指标的能力。
二、伺服系统的组成伺服系统的组成1.上位机上位机通过控制端口发送指令(模拟指令或脉冲指令)给驱动器。
驱动器跟随外部指令来执行,同时驱动器反馈信号给上位机。
最新交流永磁同步伺服电机及其驱动技术(精)
is
acos120jsin1201j 3 22
a2cos240jsin2401j 3
22
a
ቤተ መጻሕፍቲ ባይዱ
isia1 2ib1 2icj(23ib23ic)
c
11
33
isia2ib2icj(2ib2ic)
用矩阵可表示为
i i
1 0
1 2 3 2
1 2 3 2
ia ib ic
Park变换
从动坐标系(d、q)上看,则合成定子电流矢 量是静止的,也即从时变量变成了时不变量, 从交流量变成了直流量。
通过坐标变换把合成定子电流矢量从静止坐 标系变换到旋转坐标系上。
在旋转坐标系中计算出实现力矩控制所需要 的定子合成电流的数值;
然后将这个电流值再反变换到静止坐标系中。
将虚拟的合成电流转换成实际的绕组电流,
每一相相电流幅值和极性随时间
按正弦规律变化。可用空间矢量
描述,方向始终在a,b,c坐标系中各
相的轴线上。 定义合成定子电流矢量为:
i s i a i b e j 1 2 0 i c e j 2 4 0
每性一的i 相变s 相化 电使i a 流得 空合i b e 间成j 1 矢定2 0 量子 幅电i c 值流e 和矢j 2 4 极量0 i a a i b a 2 i c
pmsm
力矩的控制由力矩回路实现。 图中电流传感器测量出定子绕组电流ia,ib作为clarke变换的
输入,ic可由三相电流对称关系ia+ib+ic=0求出。 clarke变换的输出i α,iβ ,与由编码器测出的转角Θ作为
park变换的输入,其输出id与iq作为电流反馈量与指令电流 idref及iqref比较,产生的误差在力矩回路中经PI运算后输 出电压值ud,uq。 再经逆park变换将这ud,uq变换成坐标系中的电压u α,uβ。 SVPWM算法将u α,uβ转换成逆变器中六个功放管的开关 控制信号以产生三相定子绕组电流。 速度的控制由速度回路实现。
03交流永磁同步伺服电动机(1).ppt

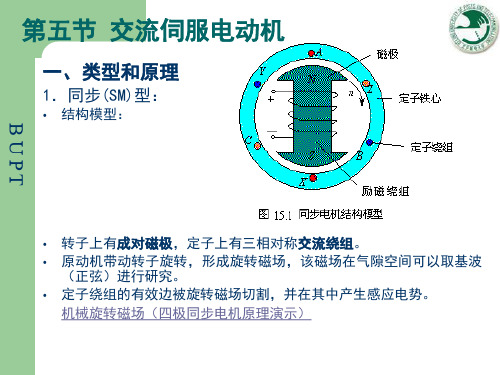
第三节 交流永磁同步伺服电动机
●基本要求: 1)认知永磁同步伺服电动机结构和工作原 理 2)了解永磁同步电动机的控制策略 3)认知永磁同步电动机的特点和主要参数
●重点和难点: 永磁同步伺服电动机结构和工作原理
交流伺服系统
反馈控制
-伺服控制的特征
➢ 实现误差的自动校正
➢ 实现高性能的重要手段
四、永磁同步电动机的特点
和直流电机相比,它没有直流电机的换向器和电刷 等缺点。 和异步电动机阻损耗减小,且转 子参数可测、控制性能好;成本高、起动困难等 缺点。 和普通同步电动机相比,它结构简单,体积小、重 量轻,效率高。
五、交流永磁同步伺服电动机的 主要参数
表 交流永磁同步伺服电动机的主要技术参数
永磁同步电动机由定子和转子两大部分组成
查看5611交流伺服电机图片库
永磁同步电动机的结构 1-旋转变压器;2-永磁体;3-电枢铁芯;4-电枢三相绕组;
5-电机转轴
二、永磁同步伺服电动机工作原理
插入5631无刷直流电机 的工作原理动画
永磁同步电动机的工作原理
三、永磁同步电动机的控制策略
1.恒压频比控制 2.矢量控制 3.直接转矩控制
速度反馈
减速器
运动
负载
工作台
直线光栅尺
速度环
电机电源
伺服 放大器
丝杠
0 to ±10VDC
位置环
控制器
对位置 速度 力矩进行精确的控制
伺服控制系统的优点(1)
❖ 提高机械的响应、速度和灵活性 ❖ 提高生产过程的柔性,减小系统建立时间 ❖ 提高设备的生产率 ❖ 提高加工制造精度,减少废品
伺服控制系统的优点(2)
❖ 零速时的满额扭矩输出 ❖ 超低速的平稳运行 ❖ 简化原有的机械系统,提高性能
伺服电机技术及其应用解读

二、武汉直驱机电-产品说明
反过来看,驱动动力应用的永磁同步电机市场巨大
在永磁同步驱动系统的应用领域里,在最近五六年时间里, 从无到有,从小到大,冒出了很多产值达到五、六个亿的生 产厂家,如沈阳蓝光、顺德KDS 、宁波兴达、常熟曳引机厂、 西子富沃德等公司。 他们的产品都是永磁同步电机,但没有叫交流伺服电机的。 做伺服电机坦率的说我们是做不过国外的,但是做永磁同步 驱动系统,我们是有可能做得过国外,比如现在的永磁同步 曳引机,国内的发展水平远远好于国外。
T1 Ud T3 D3 T5 D5 C T2
D1
Cd A B T6 T4 D4 D 6 ia ib ea eb
o
D2
ic ec
四、永磁同步伺服电机基本结构
以下分别为两种转子形式的永磁同步伺服电机剖面结构
切向式转子结构
表贴式转子结构
五、永磁同步电机控制方法及理论-矢量控制
一、伺服电机的起源及分类
火星探路者上应用了39个直流伺服电机,包括6个轮子上的驱 动马达。
NASA起初预计这两个机器人只能工作三个月,但五年过去了, 这六轮的车辆还在继续绕火星旅行,并一直在向地球回传激动 人心的数据。
可清晰看见的碳刷
一、伺服电机的起源及分类
1.2 无刷直流伺服电机:顾名思义没有碳刷装置。 无刷直流伺服电机去掉了碳刷装置,使用电子换向,实现了电 机免维护,电磁干扰小。寿命更长。 我们的神五神六上面用的都是无刷直流伺服电机。原因并不是 我们比美国更先进,而是说我们没有 办法解决在太空环境中碳刷的可靠性, 所以只好使用无刷直流伺服电机来代 替有刷电机。 可靠性是相对的,在太空中,带着一 个电子换向装置的无刷直流伺服电机 可靠性毫无疑问比不上不带电子换向 的有刷直流伺服电机。
交流伺服电动机及其驱动
▪ 气隙磁场难于直接检验,可以用转子的位置和速度的等效控 制(矢量控制)来代替
▪ T=CMI2 cos (T:转矩;CM:转矩系数;:气隙磁通;I2: 转子电流;cos:转子功率因数)
▪ ,I2,cos 都是转差率S的函数,难以直接控制
• 改变定子电压U和定子供电频率f之间的不同比例关系,得到不 同的变频调速方式。
5)变频调速器装置(VFD)
可分为电压型和电流型两大类 大功率晶体管组成的电压型变频调速装置使用广泛
6、改变转差率调速(适用于绕线式转子) 7、三相异步电动机的反转 对调任意两根电源线即可。
六、选用
同直流伺服电动机的选用
BUPT
• 转子的转速ns与旋转磁场转速相同,称为同步转速。ns与所接交 流电的频率f及电机的磁极对数p之间的关系为 ns=f/p。在中
国,电源频率为50赫 ,因此二极电机同步转速为3000 转/分, 四极电机同步转速为1500转/分, • 采用永久磁铁磁场,不需要磁化电流控制,只要检测磁铁转子的 位置即可;也称为无刷直流伺服电动机。容易控制;转矩产生机 理与直流伺服电动机相同 • T=CMIa。(T:转矩;CM:转矩系数;:气隙磁通;Ia :转子 电流)
▪ 关键是解决对交流电动机的控制和驱动 ▪ 气隙磁场难于直接检验,可以用转子的位置和速度的等效控
制(矢量控制)来代替
▪ 矢量控制是交流伺服系统的关键,可以利用微处理器和微型 计算机数控对交流电动机作磁场的矢量控制,从而获得对交 流电动机的最佳控制。
▪ 矢量控制原理:
矢量控制:同时控制电动机输入电流I1的幅值和相位以 得到交流电动机的最佳控制。
2)电气旋转磁场:三相对称的交流绕组通入三相对称的交流电 流时会在电机的气隙空间产生。· 两种旋转磁场尽管产生的机理
永磁交流同步伺服电机的结构和工作原理

永磁交流同步伺服电机的结构和工作原理
交流同步伺服电机的种类:
励磁式、永磁式、磁阻式和磁滞式
(1)永磁交流同步伺服电机的结构
永磁交流同步伺服电机由定子、转子和检测元件三部分组成。
电枢在定子上,定子具有齿槽,内有三相交流绕组,形状与普通交流感应电机的定于相同。
永磁交流同步伺服电机结构
(2)永磁交流同步伺服电机工作原理和性能
永磁交流同步伺服电机的性能同直流伺服电机一样,也用持性曲线和数据表来表示。
最主要的是转矩—速度特性曲线。
在连续工作区(Ⅰ区),速度和转矩的任何组合,都可连续工作。
但连续工作区的划分受到一定条件的限制。
连续工作区划定的条件有两个:一是供给电机
的电流是理想的正弦波;二是电机工作在某一特定温度下。
断续工作区(Ⅱ区)的范围更大,尤其在高速区,这有利于提高电机的加、减速能力。
工作原理特性曲线。
永磁同步电机 伺服电机 关系

永磁同步电机伺服电机关系
一、永磁同步电机和伺服电机的原理
永磁同步电机和伺服电机的基本原理虽然相同,都是基于电磁感应定理和磁场的交替作用来实现机械动力转化,但是在具体的实现方式上却存在差异。
永磁同步电机采用了永磁材料作为转子,与定子上的电磁线圈形成磁场的交替作用以实现运动,而伺服电机的转子则通常是一种磁性材料,通过控制电流来实现转子相对于定子的运转。
二、永磁同步电机和伺服电机的控制方式
永磁同步电机通常采用电子式换相技术,通过将控制电流和感应电流进行复合,来控制电机的运行方式。
而伺服电机则通常采用切换电容方式进行控制,通过切换不同容量的电容来调节电机的运转速度和输出力矩。
这一点与永磁同步电机的电路结构存在较大差异。
三、永磁同步电机和伺服电机适用场景的差异
永磁同步电机适用于高速高动态响应的场景,例如工业生产线上的自动化设备,以及新能源汽车方面。
而伺服电机则适用于高精度控制方面的应用,例如智能机器人、CNC加工设备、医疗器械等。
这一点在设计和选型时需要特别注意。
永磁同步电机 和伺服电机

永磁同步电机和伺服电机永磁同步电机与伺服电机。
一、永磁同步电机。
(一)基本原理。
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)是一种同步电机,其转子采用永磁体励磁。
定子绕组通入三相交流电后,会在电机内部产生旋转磁场。
由于转子的永磁体与定子旋转磁场相互作用,使得转子跟随旋转磁场同步旋转。
永磁体的存在使得电机具有较高的效率,因为不需要额外的励磁电流来产生磁场。
根据永磁体在转子上的安装方式不同,可以分为表面式永磁同步电机和内置式永磁同步电机。
表面式永磁同步电机的永磁体安装在转子表面,结构简单,易于制造;内置式永磁同步电机的永磁体嵌在转子内部,具有更高的转矩密度和更好的弱磁性能。
(二)特点。
1. 高效率。
- 由于永磁体提供磁场,减少了励磁损耗,在额定工况下,永磁同步电机的效率通常比异步电机高5 - 10%。
例如,在一些工业应用中,对于长期运行的设备,高效率意味着更低的能耗成本。
2. 高功率因数。
- 永磁同步电机的功率因数接近1,这意味着在电网供电时,电机对电网的无功需求较小。
这样可以减少电网的无功补偿设备的容量需求,提高电网的供电质量。
3. 小体积、高转矩密度。
- 永磁体的高磁场强度使得电机在相同的功率和转速要求下,可以设计得更小更紧凑。
例如,在电动汽车的驱动电机应用中,小体积的永磁同步电机能够在有限的空间内提供足够的转矩。
(三)应用领域。
1. 电动汽车。
- 是电动汽车驱动电机的主流选择之一。
它能够满足电动汽车对高效率、高转矩密度和宽调速范围的要求。
例如,特斯拉的部分车型就采用了永磁同步电机,能够为车辆提供良好的加速性能和较长的续航里程。
2. 工业自动化设备。
- 在工业机器人、数控机床等设备中广泛应用。
在工业机器人关节驱动中,永磁同步电机的高精度和高响应速度能够满足机器人精确运动控制的需求。
3. 家用电器。
- 如空调、冰箱等。
在空调压缩机的驱动中,永磁同步电机的高效率有助于降低空调的能耗,符合节能的要求。
交流永磁伺服电机原理

交流永磁伺服电机原理交流永磁伺服电机是一种先进的电机类型,其原理基于永磁体和交流电机的结合。
这种电机利用永磁体的磁场来产生转矩,从而实现电机的旋转。
交流永磁伺服电机通常由定子和转子两部分组成。
定子部分包含一个或多个绕组,这些绕组通过交流电产生旋转磁场。
转子部分则由永磁体构成,永磁体产生的磁场与定子产生的磁场相互作用,从而产生转矩。
当给定子绕组施加交流电压时,定子产生的旋转磁场与转子永磁体产生的磁场相互作用,产生转矩使电机旋转。
这种相互作用使得电机的旋转速度和方向可以通过调整交流电压的频率和幅度来控制。
交流永磁伺服电机的优点包括高效率、高精度、高响应速度和低噪音等。
由于其结构简单、维护方便、可靠性高等特点,交流永磁伺服电机在许多领域得到了广泛应用,如工业自动化、航空航天、交通运输等。
除了上述提到的优点,交流永磁伺服电机还具有以下特点:
1. 宽调速范围:交流永磁伺服电机可以实现从低速到高速的宽调速范围,适用于各种不同的应用场景。
2. 节能环保:由于其高效率和低噪音的特点,交流永磁伺服电机在运行过程中产生的热量较少,不需要大型散热器,从而减少了能源浪费和环境污染。
3. 易于控制:交流永磁伺服电机的旋转速度和方向可以通过调整输入的交流电压的频率和幅度来控制,使得其控制方式简单、直观。
4. 可靠性高:由于其结构简单、维护方便的特点,交流永磁伺服电机在长时间运行过程中具有较高的可靠性,减少了故障率和维修成本。
总之,交流永磁伺服电机是一种高效、精确、快速、节能环保、易于控制和可靠性高的电机类型,适用于各种不同的应用场景。
伺服电机结构和工作原理
(2)相位控制 保持控制电压旳幅值不变,仅变化控制电压与 励磁电压间旳相位差。
(3)幅-相控制 同步变化控制电压旳幅值和相位。
二、直流伺服电动机
1.基本构造
老式旳直流伺服电动机动实质是容量较小旳 一般直流电动机,有他励式和永磁式两种,其构 造与一般直流电动机旳构造基本相同。
三、交直流伺服电动机旳区别
直流伺服电动机旳缺陷: ① 电刷和换向器易磨损,换向时产生火花,限制转速 ② 构造复杂,制造困难,成本高 交流伺服电动机旳优点: ① 构造简朴,成本低廉,转子惯量较直流电机小 ② 交流电动机旳容量不小于直流电动机
伺服系统旳性能要求
一、基本要求
1、位移精度高 位移精度:指指令脉冲要求机床工作台旳位移量和该指令脉
1、构造(永磁同步电机) 主要由:定子1、转子5和检测元件8等几部分构成。
1 2
3
4
1
56
7
8
9
2.工作原理
交流伺服电动机在没有控制电压时,气隙中 只有励磁绕组产生旳脉动磁场,转子上没有开启 转矩而静止不动。当有控制电压且控制绕组电流 和励磁绕组电流不同相时,则在气隙中产生一种 旋转磁场并产生电磁转矩,使转子沿旋转磁场旳 方向旋转。但是对伺服电动机要求不但是在控制 电压作用下就能开启,且电压消失后电动机应能 立即停转。假如伺服电动机控制电压消失后像一 般单相异步电动机那样继续转动,则出现失控现 象,我们把这种因失控而自行旋转旳现象称为自 转。
为消除交流伺服电动机旳自转
现象,必须加大转子电阻r2,这是 因为当控制电压消失后,伺服电动
机处于单相运营状态,若转子电阻
很大,使临界转差率sm>1,这时正 负序旋转磁场与转子作用所产生旳