基于模型的系统工程(MBSE)的案例研究,第 1 部分_ IBM Rational Harmony 的集中式系统模型
基于模型的系统工程pdf
基于模型的系统工程pdf基于模型的系统工程(Model-Based Systems Engineering,MBSE)是一种系统工程方法论,它将系统设计、开发和验证过程中的各个阶段都建立在一个共享的模型基础上。
这个模型可以是一种图形化的表示,也可以是一种数学模型,它描述了系统的各个方面,包括需求、功能、结构、行为等等。
基于模型的系统工程旨在提高系统工程的效率和质量,减少错误和风险,增强团队间的协作和沟通。
关于基于模型的系统工程的详细内容,可以在以下方面进行探讨:1. 概述和基本原理,介绍基于模型的系统工程的基本概念、原理和核心思想。
解释为什么使用模型来支持系统工程,并描述模型的作用和优势。
2. 模型的建立和表示,讨论如何建立系统模型,包括模型的组织结构、元素的定义和关系的建立。
介绍常用的建模语言和工具,如统一建模语言(UML)和系统建模语言(SysML)。
3. 需求工程,说明如何使用模型来捕捉和管理系统的需求。
讨论需求的分类、需求的表示和分析方法。
介绍如何使用模型来验证需求的正确性和一致性。
4. 功能和结构设计,讲解如何使用模型来描述系统的功能和结构。
介绍如何使用模型来进行系统的分解和组合,以及如何进行功能和结构的优化和验证。
5. 行为建模和仿真,介绍如何使用模型来描述系统的行为。
讨论如何使用模型进行行为建模、时序分析和仿真。
说明如何使用模型来验证系统的性能和可靠性。
6. 系统集成和验证,探讨如何使用模型来支持系统的集成和验证过程。
讲解如何使用模型来进行接口定义和一致性检查。
介绍如何使用模型来进行系统级的验证和验证结果的分析。
7. 模型管理和协作,讨论如何管理和维护系统模型。
介绍模型版本控制、变更管理和模型协作的方法和工具。
8. 实例和案例分析,给出一些基于模型的系统工程的实例和案例分析,以便读者更好地理解和应用这种方法。
基于模型的系统工程是一个广泛而复杂的领域,上述内容只是其中的一部分。
如果你对某个具体方面感兴趣,我可以提供更详细的信息。
mbse在无人机作战系统架构设计中的应用_概述及解释说明

mbse在无人机作战系统架构设计中的应用概述及解释说明1. 引言1.1 概述本文旨在探讨MBSE(基于模型的系统工程)在无人机作战系统架构设计中的应用。
随着无人机技术的飞速发展,其在军事、民用等领域中的运用越来越广泛。
为了提高无人机作战系统的性能和可靠性,有效的系统架构设计变得至关重要。
1.2 文章结构文章主要分为五个部分。
引言部分对文章内容进行概括,并简要介绍了每个章节的内容和目标。
第二部分将介绍MBSE和无人机作战系统架构设计的基本概念。
第三部分将通过具体案例分析,详细说明MBSE在无人机作战系统架构设计中的应用情况。
第四部分将对利用MBSE进行设计和模拟所得到的结果进行分析,并探讨其在实际应用中可能面临的挑战和限制因素。
最后一部分是结论,总结回顾了本文主要内容,并提出新见解或未来研究方向。
1.3 目的本文旨在全面阐述MBSE在无人机作战系统架构设计中的应用情况,并评估其优势和局限性。
通过对具体案例的分析,我们将展示MBSE技术在无人机作战系统设计中的实际效果。
同时,我们将讨论利用MBSE进行设计和模拟可能面临的挑战,并提出未来发展方向和建议。
最终,希望为无人机作战系统架构设计提供宝贵的参考和指导,推动该领域的进一步研究和发展。
2. MBSE在无人机作战系统架构设计中的应用2.1 MBSE概述MBSE(Model-Based Systems Engineering)是一种基于模型的系统工程方法,它通过建立、分析和演化系统模型来支持系统的设计、开发和验证。
MBSE 强调了系统工程的整体性,促进不同领域专家之间的协作与沟通,并提供一个统一的框架来管理和维护复杂系统。
2.2 无人机作战系统架构设计概述无人机作战系统是指利用无人机技术进行军事作战任务执行的整体系统。
它由多个组件和子系统组成,包括传感器、通信设备、导航控制单元等。
无人机作战系统要求高度可靠性、高效性和可扩展性,因此在设计阶段需要充分考虑各个组件之间的相互关系以及整体架构。
方案:MBSE(基于模型的系统工程)

方案:MBSE(基于模型的系统工程)俎涛,火龙果软件工程技术中心方案简介MBSE(基于模型的系统工程)是对复杂系统进行分析设计和开发的有效方法。
为了帮助客户有效实施MBSE,由教练采用客户行业案例,带领客户团队,实施完整的MBSE过程,包括:系统需求建模、系统设计建模、软件需求建模/软件设计建模/基于模型的代码生成、硬件需求建模/硬件设计建模/基于模型的代码生成、基于模型的质量验证。
在实施过程中,采用基于建模工具EA或者其他支持MBSE的建模工具,结合相关的建模规范SysML和UML,实现如下环节:建模、文档生成、模型仿真与验证、代码生成、质量跟踪、变更管理。
MBSE路线图 1. MBSE(模型驱动的系统工程)概览1.· MBSE的目标2.· MBSE涉及的角色3.· MBSE的过程4.· MBSE的工件5.· MBSE的支持工具6.· MBSE在各个行业的发展情况2.系统分析、设计、开发与验证。
1.· 系统需求分析建模2.· 系统分析与建模3.· 系统架构设计与建模4.· 模块设计与建模5.· 软件和硬件接口建模,划分软件和硬件边界6.· 模型仿真与验证7.3. 软件分析、设计、开发与验证1.·软件需求分析与建模2.·软件架构设计与建模3.·软件详细设计与建模4.·代码生成5.·模型仿真与验证4.物理系统建模与仿真1.·静态结构建模2.·动态逻辑建模3.·模型仿真与验证基于SysML进行系统分析设计建模Sys ML是OMG推出的专门面向系统分析设计的建模语言,可以对系统结构进行自顶向下的分解建模,可以帮助系统工程师分解复杂系统的结构,如下是Sys ML的结构定义图。
Sys ML还可以对一个系统的内部各个结构的构成进行建模,如下是系统的内部模块定义图Sys ML还可以对系统的动态逻辑进行建模,如下是用来描述控制逻辑的参数图:基于UML进行系统分析设计建模UML是OMG定义的面向软件建模的标准语言,可以帮助软件工程师对软件需求、软件架构、软件详细设计、软件代码进行建模。
浅谈基于模型的系统工程(MBSE)技术

浅谈基于模型的系统工程(MBSE)技术MBSE概念国际系统工程学会(INCOSE)在《系统工程2020年愿景》中,给出MBSE技术的定义:基于模型的系统工程是对系统工程活动中建模方法应用的正式认同,以使建模方法支持系统要求、设计、分析、验证和确认等活动,这些活动从概念性设计阶段开始,持续贯穿到设计开发以及后来的所有的生命周期阶段。
基本系统工程专注于功能逻辑模型,专业领域关注的是性能模型,设计和制造专注于几何模型,MBSE的关键是把这几个模型相互关联,形成一套建模标准。
图1 MBSE与各模型的关系基于模型的系统工程MBSE(Model Based Systems Engineering)技术以其无歧义、便于进行设计综合、便于进行数据更改和追溯等优势,成为国内外复杂系统设计研究的热点,也是解决系统综合设计的有效手段。
由于复杂系统更需要系统工程的应用,所以航空、航天及汽车领域是目前系统工程发展的主要战场。
飞机机电系统包括燃油系统、液压系统、环控系统、电气系统、二动力系统等,是典型的复杂系统。
随着系统复杂度与综合化程度的提高,飞机机电系统的设计过程呈现出需求多样化、功能交互高度复杂、各领域物理系统交联耦合强、系统综合化程度高等特点,开展飞机机电系统综合设计已成为飞机设计亟需解决的问题。
美国空军从20世纪80年代开始实施了一系列机电综合研究计划,这些研究计划不仅在时间上具有连续性,在研究内容上也具备继承性,如图2所示。
图2 军机机电综合发展历程MBSE设计流程以飞机机电系统为例,介绍MBSE设计流程。
基于模型的系统工程将系统的设计过程分解为需求(requirements)定义-功能(function)分析-逻辑(logical)设计-3D物理(physical)设计过程,简称为RFLP。
RFLP贯穿于产品概念设计、方案设计、详细初步设计以及详细设计整个研制阶段中,对应于每个阶段、每个设计层级(飞机级、系统级、分系统级、设备级)、每个系统(燃油系统、环控系统、液压系统、电气系统等)构建相应的R模型、F模型、L模型和P 模型,从而实现对复杂系统需求、架构、功能、行为等不同层面的建模,基于模型支撑整个系统的需求、设计、分析、验证和确认等活动,实现整个设计过程的数据追溯。
mbse实践案例

MBSE(基于模型的系统工程)实践案例包括以下几种:
1. **美国宇航局喷气推进实验室(JPL)**:JPL已经将MBSE成功应用于实际项目的系统工程问题,覆盖了项目类型、项目活动和生命周期阶段。
例如,在火星2020探测车、Orion、欧罗巴卫星、欧罗巴快船、地球观测卫星SMAP等项目中应用了MBSE。
这些项目涵盖了多领域的机器人太空探索,如火星、太阳系、系外行星、天体物理学、地球科学和星际网络。
2. **军事系统研制**:采用MBSE方法进行系统研制,在设计阶段早期,应用建模和仿真手段实现需求的早期验证,保证设计过程的正确性。
MBSE持续贯穿整个武器系统的生命周期过程,开展体系建模、系统建模、专业领域建模,实现系统整个设计过程的模型化表达,并采用模型仿真手段,提升需求分析和验证能力,降低型号验证风险。
这些案例显示,MBSE在复杂系统的设计、开发和验证中具有显著的优势。
它能够提供一种直观、可追溯的模型表示形式,使各方更好地理解系统的整体结构和行为,提高设计的可靠性和有效性。
基于模型的系统工程(MBSE)的案例研究,第 2..

发布日期: 2012 年 3 月 23 日 级别: 初级 原创语言: 英文 访问情况 : 1652 次浏览 评论: (查看 | 添加评论 - 登录)
为本文评分
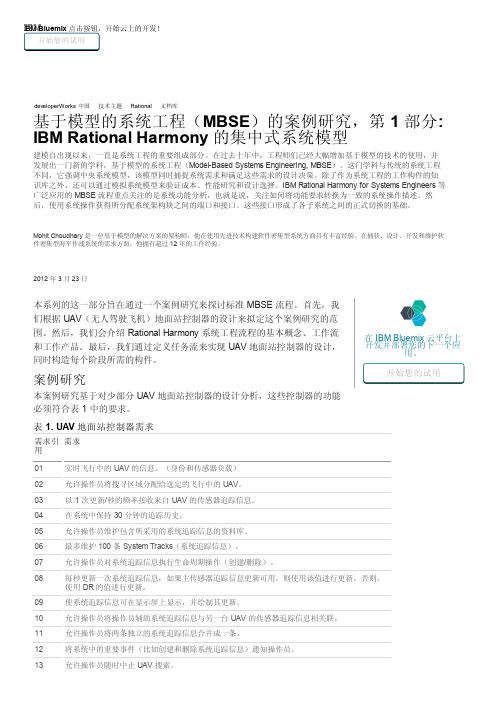
在本系列的第 1 部分中,我们获得了 UAV 地面控制器的系统设计,我们使用 IBM Rational Harmony 系统工程作为一个流程,指 引我们了解子系统和逻辑接口。不过,分布式系统的设计往往以数据为中心,而数据实体在系统设计中又占据最重要的位置。因 此,很显然,我们只好稍微调整一下 Rational Harmony 系统工程流程,让设计流程把重点放在数据实体上,同时继续将 Rational Harmony 系统工程等成熟的 MBSE 流程的优势融入设计中。
在一个域中,每个主题都将惟一的主题名称、数据类型 和一组服务质量 (QoS) 策略与数据相关联。每个主题都与一个数据类型相 关联,但多个不同主题可以发布相同的数据类型。发布者的行为由与发布者、数据创建者和特定数据源的主题元素关联的 QoS 策略 决定。同样,订阅者的行为由与订阅者、数据读取器和特定数据接收器的主题元素关联的 QoS 策略决定。可以在语言中指定并在案 例研究中使用的一些 QoS 策略和操作,如表 1 和表 2 所示。QoS 策略和操作如下所示。
谈谈MBSE--基于模型的系统工程

谈谈MBSE--基于模型的系统工程(图片来自网络)文/侯哥1.最近几年,系统工程的概念越来越火热。
其中MBSE是目前最受大家推崇的,也可以说是最时髦的。
在复杂系统的开发领域,如果你不能说出一些跟MBSE有关的一些词儿,那么你是无法号称自己站在时代前沿的。
国外把基于MBSE视为系统工程的“革命”、“系统工程的未来”、“系统工程的转型”等。
国内的很多大型组织也已经在开展了相关研究和应用了。
其中,包括大飞机和汽车等复杂的系统设计。
在汽车的开发,尤其是汽车的电气架构开发领域,MBSE已经被越来越多的公司所引入,并且通过使用相关的软件工具,把MBSE应用到电子电器开发的各个领域。
包括用户场景的描述、功能的开发、系统的详细设计和相应的测试验证。
由于现在已经有了直接把模型转换为代码的工具,所以,很多OEM可以通过MBSE的使用,具备或提高了一定的上层应用软件的开发能力。
以前的文章介绍过SDV(软件定义汽车)的概念,无论是否达到了SDV的阶段,OEM开发部分软件已经是一个明显的趋势和不争的事实了。
而MBSE的应用和推广必将助力OEM和整个行业的软件质量的提升和开发速度的提高。
有个大佬曾经说过:MBSE下,工程研制工作由过去的“80%劳动、20%创造”转变为“20%劳动、80%创造”。
为啥呢?一句话:MBSE可以让工程师更多的时间投入在设计中,而不是文档上。
2.那么MBSE究竟是何方神圣?今天给大家介绍一下相关的概念,让大家有一个初步的认识。
MBSE是Model-Based SystemsEngineering的缩写,翻译成中文就是:基于模型的系统工程。
这里面有三个关键词:模型,系统和工程。
模型是一个含义丰富的词。
在MBSE里,特指描述待研究的对象,把待研究的对象的一些特性抽象出来,并使用标准化的表达方式来进行描述,从而能够进一步进行研究的一种形象化的表达方法。
工程这个词就不需要解释了。
什么才是“系统”呢?系统的定义:系统是由两个以上有机联系、相互作用的要素所组成,具有特定功能、结构和环境的整体。
基于模型的系统工程(mbse)方法论综述_概述说明

基于模型的系统工程(mbse)方法论综述概述说明1. 引言1.1 概述引言部分主要旨在介绍本篇长文的主题——基于模型的系统工程(MBSE)方法论,并概述文章的结构和目的。
MBSE是一种系统工程方法论,通过建立和使用模型来描述、分析、设计和验证系统,以提高系统开发过程中的效率和质量。
1.2 文章结构本文将按照以下结构展开对MBSE方法论的综述。
首先,我们将对系统工程和模型驱动工程进行简介,为读者提供一定背景知识。
接着,我们将详细探讨MBSE 方法论的定义与特点。
随后,我们将重点关注MBSE方法论中的三个关键要点:模型建立与表示、模型验证与验证以及模型驱动设计与开发。
最后,在应用层面上,我们将通过案例分析来展示MBSE方法论在不同行业领域中的应用情况。
最后一部分是结论与展望,在此部分我们将总结文章中阐述的观点和发现,并对MBSE方法论未来发展进行展望。
1.3 目的本文旨在全面回顾和概述基于模型的系统工程(MBSE)方法论,并探索其在实践中存在的关键要点和挑战。
同时,本文也将通过应用案例分析,展示MBSE 方法论在不同行业领域中的应用情况。
通过阅读本文,读者可以深入了解MBSE方法论的定义、特点以及其对系统工程过程的价值和影响。
最后,我们希望能为读者提供对MBSE方法论发展趋势的展望,引发更多关于此领域未来可能性的思考。
2. 基于模型的系统工程方法论概述2.1 系统工程简介系统工程是一门综合性学科,它解决了复杂系统设计和开发过程中遇到的各种问题。
它通过从整体上考虑、分析和优化系统的需求、功能、结构和性能,以及在整个生命周期中管理系统各个方面的交互作用,实现了有效的系统集成与开发。
2.2 模型驱动工程概念模型驱动工程(Model-Driven Engineering, MDE)是一种软件开发方法,其核心理念是将模型作为软件开发过程中的主要产物和交流媒介。
MDE通过建立抽象、可执行的模型来描述系统需求、设计和实现,并通过自动化转换或代码生成来实现软件开发生命周期中的各个阶段。
基于模型的系统工程(MBSE)

基于模型的系统工程(MBSE)系统工程师是系统工程实施过程的关键因素,然而他们总是疲于沟通和协调,被海量的文档和无尽的变更所淹没。
有什么办法可以帮助系统工程师真正发挥他们在复杂产品研发中的重要作用,同时也使其自身逐步成长为“宽频带、高振幅”的复合型人才?这个解决方案就是基于模型的系统工程(MBSE,ModelBased Systems Engineering)。
什么是MBSE?MBSE在2007年的INCOSE (系统工程国际委员会)国际研讨会上首次被提出。
MBSE是一种正规化的建模应用,它为系统工程过程各阶段的活动提供支撑:•需求分析•功能分析•设计综合•验证和确认MBSE对上述活动的支撑贯穿从概念阶段开始,到设计、开发直至交付使用维护的整个系统生命周期MBSE的核心理念MBSE的核心是模型。
模型是对现实的抽象,旨在回答有关现实世界中的具体问题,是模拟或表达一个真实世界的过程或结构。
建模的目的是为了更好的理解和管理复杂性。
模型的优势MBSE传递的模型包括需求、结构、行为和参数在内的动态信息。
模型使整个组织中各专业领域人员更加直观的理解和表达系统,确保全程信息传递的一致性。
•系统工程师关注于问题本身技术内容而非文档•图形方式往往比文字方式更直观且没有歧义•减少重复和不一致,从而使跨领域的协作更明确•模型可以被验证MBSE的最佳实践MBSE强调统一的中央系统模型,该模型同时捕捉系统需求和满足这些需求的设计决策。
可以通过对系统模型的仿真来验证性能,并进行最优化的选择。
我们提供的MBSE方法培训和工程咨询能为您带来:•准确的需求描述,增进有关各方之间的沟通•在产品研发早期就对需求和设计进行验证和确认•提高了管理复杂系统的能力,这得益于从多个视角审视系统模型和分析变更带来的影响•提供了一个明确的模型系统,使其一致性、正确性和完整性可以被有效评估•采用以模型驱动的方法来捕获信息,增强了知识捕获和信息复用,降低更改设计所产生的成本•剖析如何将MBSE方法和工具融入现有的研发环境如您对内容感兴趣,可随时与我们联系沟通系统工程部:谢工手机:138****9842。
基于模型的系统工程(MBSE)解决方案探讨

1009-0940(2020)-2-34-36基于模型的系统工程(MBSE)解决方案探讨刘红皊 江西洪都航空工业集团有限责任公司 南昌市 330024摘 要:系统工程是一种逻辑思维的方法,它面向系统全生命周期,其关键在于需求分析、功能分析和架构设计,最终提供利益相关者满意的产品。
基于模型的系统工程以模型为中心,为提升研制管理工作的效率奠定了基础,能够在一定程度上缩短工程周期和降低成本。
关键词:MBSE 需求工程 DOORS Rhapsody 解决方案0 引言系统工程作为一种研制管理方法,自20世纪60年代以来就常用在国外航天和国防领域。
构建系统模型是系统工程的核心,传统的系统工程,是基于各种文本文档进行系统架构模型构建的,模型构建过程中的方案设计和概念开发都是依靠文件进行的。
在需求规格、接口控制文件、产品规范等的撰写过程中,开发人员需要耗费大量的时间和精力。
并且由于文件中存在隐含的需求,在判识和传递上很难确保一致,加大了需求变更所造成的影响以及覆盖分析的难度。
而且在系统的早期阶段,一旦疏忽逻辑设计及系统需求的确认和验证,那么后续的需求变更会导致巨大的影响,同时工程的开发周期和成本也会大大增加。
M B S E使用系统建模语言(S y s M L)构建系统架构模型。
通过以建模语言表达的系统静态视图代替大量文档,包括参数、架构和接口,以及系统的动态行为。
SysML作为系统工程的标准建模语言,具有图形化且易于计算机处理的优势,在运用于复杂系统的分析、设计和验证时,不仅能够提高系统的质量,还能有效提升系统工程信息在工具之间交换方面的能力,同时能减少系统或软件与其它工程学科间的语义差异。
近几年,M B S E方法已经成为系统工程界研究与应用的热点。
其作为一种新的范式,被美国航空航天局、欧空局等政府组织、IBM等软件和方案提供商积极在项目中加以应用和研究。
相比基于文档的系统工程(TSE),MBSE的优势主要体现在以下几点:(1)知识表示的无二义性;(2)一体化的系统设计;(3)系统内容的可重用性;(4)提高沟通交流的效率;(5)增强知识的获取和再利用;(6)通过模型可对系统进行多角度分析,支持早期进行系统验证和确认,可降低风险,减少设计更改带来的时间周期和费用等。
基于模型的系统工程(MBSE)应用于飞机概念设计探讨
教练机2017.NO.20引言概念设计是飞机设计的初始阶段,该过程涉及气动、结构、电子、控制等众多学科,同时包含大量的设计变量、状态变量和关联约束,是一个需反复迭代、高度综合的创造过程。
该过程占用约8%的研制时间和不到10%的成本投入,但其做出的具有全局性影响的重大决策,却确定了飞机约80%的全寿命成本。
然而,当前飞机设计师利用目前依据经验、文档的传统设计方法,设计现代高度复杂的飞机系统显得力不从心。
美国AIAA 将传统飞机概念设计的问题概况为:概念设计的综合程度低,不能充分利用概念设计阶段的自由度来提高设计整体水平,也不能集成多学科实现最优化,更不能达到新增需求情况下的平衡设计。
如何用更好的方法开展概念设计始终是飞机设计师关注的重要课题。
1当前概念设计需求分析1.1存在的问题飞机研制存在的普遍现象是降性能、拖进度、涨费用,即使飞机按设计要求交付了,用户在使用时也不满意。
这些都同飞机设计过程中,特别是飞机概念设计的因素密切相关,主要表现为概念设计中需求不明确、设计协调差和综合水平低等方面:1)重方案,轻需求我国航空工业起步晚,走过了仿制、引进、再创新的发展道路,当前对飞机的整个使用定义和使用需求的研究不够,还没有建立完整的正向设计能力;2)设计协调性差对需求、约束和矛盾的梳理不够清晰、系统,缺基于模型的系统工程(MBSE )应用于飞机概念设计探讨罗松,魏榕祥,林资平,沈亮,吕婧(航空工业洪都,江西南昌330024)摘要:通过分析目前飞机概念设计中存在的问题和设计需求,引入基于模型的系统工程(MBSE ),并根据归纳MBSE 的流程、实现方法和应用特点,分析了MBSE 解决飞机概念设计问题的技术可行性,并指出了MBSE 的发展趋势及其应用在技术、管理和思想等方面的诸多挑战。
关键词:基于模型的系统工程;飞机概念设计;设计问题;应用分析Study of the Application of Model based System Engineering in Aircraft Conceptual DesignLuo Song ,Wei Rongxiang ,Lin Ziping ,Shen Liang ,Lv Jing(AVIC-HONGDU,Nanchang,Jiangxi,330024)Abstract :By analyzing the existing problems and design requirements of aircraft conceptual design,the model based system engineering (MBSE)is introduced to solve the problem in a suitable way.Then by concluding the process,realization method and application characteristics of the MBSE,this paper analyzes the technology feasibility of MBSE to solve the aircraft conceptual design problem and points out the development trend of MBSE and the challenges of its application in technology,management and thought.Key words :MBSE ;Aircraft conceptual cesign ;Design problem ;Application analysis53教练机2017.NO.2乏清晰、系统的总体概念方案等顶层设计,导致方案设计推进中常常顾此失彼,反复频繁,研发周期漫长且不可控;3)综合水平低对飞机复杂设计的综合优化程度低,“拍脑袋”决策多,设计水平或质量不高;概念设计过程缺乏验证,难以保证方案总体上满足设计要求。
浅析基于模型的系统工程(MBSE)在系统研制过程中的应用

浅析基于模型的系统工程(MBSE)在系统研制过程中的应用摘要:传统系统工程中基于文档的研发模式存在需求不明确、不清晰、互相矛盾等隐患,甚至进入系统设计阶段、实现和验证阶段才能发现需求不合理,此时需求更改导致产品研制需要投入大量的人力、物力和周期。
基于模型的系统工程(MBSE)属于“需求驱动型”研发模式,在需求分析阶段进行系统需求的捕获、分析和验证,在早期暴露并全部解决需求存在的隐患和问题,并基于验证后的需求开展后续研制,大大减少了研制过程中的反复和浪费。
关键词:正向设计;需求驱动型;MBSE传统系统工程是基于文本的系统工程,工程活动的产出是一系列基于自然语言的文档,如用户需求、设计报告、产品图样等。
在这种模式下,要把散落在各文档中工程系统的信息集成关联在一起,费时费力且容易出错。
随着工程系统越来越复杂,传统系统工程方法越来越难以应对,系统研制成本越来越高。
近年来,基于模型化为代表的信息技术快速发展,在需求牵引和技术推动下,基于模型的系统工程(Model-Based Systems Engineering,以下简称MBSE)方法论应运而生。
MBSE包括技术过程和管理过程两个层面,技术过程遵循分解—集成的系统论思路和渐进有序的开发步骤,即“V&V”模式。
管理过程包括技术管理过程和项目管理过程。
在技术过程层面主要是系统模型的构建、分析、优化、验证工作,在管理过程层面,包括对系统建模工作的计划、组织、领导、控制。
因此,系统工程实质上包括系统建模技术和建模工作的组织管理技术两个层面,其中系统建模技术包括建模语言、建模思路和建模工具。
MBSE在建模语言、建模思路、建模工具上有重大转变,相对传统系统工程有诸多不可替代的优势,是系统工程的颠覆性技术。
1.构建需求驱动的研制流程通过对标国际系统工程最佳实践,引入空客公司基于需求的工程流程(RBE),采用国际先进的流程建模工具IBM Rational Method Composer(RMC),从两个维度对工程系统的研制过程进行解析,横向按照产品研制过程分为方案论证阶段、初样研制阶段、试样研制阶段和设计定型阶段,纵向按照系统层级结构分为用户层、系统层、部件层、软件/硬件层。
试论基于模型的系统工程(MBSE)的推进思路
34的推进思路摘 要:现阶段推广应用系统工程已经是军方、机关和集团公司的统一要求,也是型号研制的必然选择。
本文介绍了基于模型的系统工程(MBSE)的概念,分析了其推广过程中存在的问题及解决措施,最后提出了在型号研制中应用MBSE的思路。
关键词:系统工程 基于模型的系统工程 推进思路1 系统工程概述对接公司的战略规划和“智慧洪都”的愿景,为应对复杂性带来的挑战,在装备研制过程中,必须通过引入基于模型的研发业务模式,运用“系统工程”的流程、方法来指导研制过程,基于需求自顶向下,层层细分,逐步迭代、验证和确认,开展正向设计。
系统工程覆盖全生命周期,其核心在“前端”的需求分析、功能分析和架构设计,实现“尽早”对系统需求、功能、架构的验证和确认,进而指导产品开发和生命周期后续阶段。
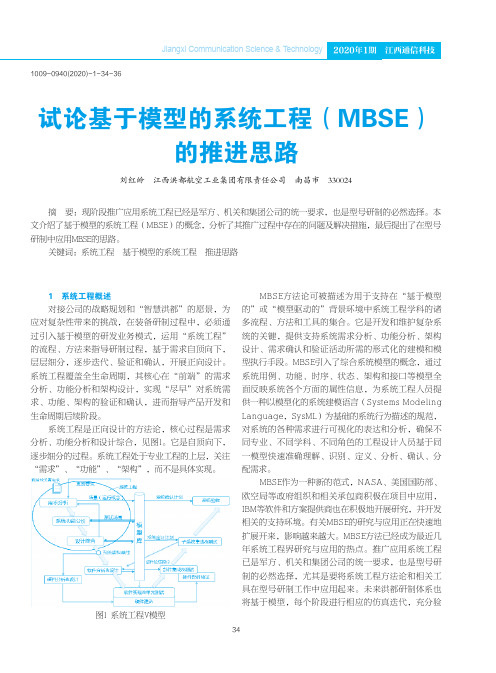
系统工程是正向设计的方法论,核心过程是需求分析、功能分析和设计综合,见图1。
它是自顶向下,逐步细分的过程。
系统工程处于专业工程的上层,关注“需求”、“功能”、“架构”,而不是具体实现。
M B S E方法论可被描述为用于支持在“基于模型的”或“模型驱动的”背景环境中系统工程学科的诸多流程、方法和工具的集合。
它是开发和维护复杂系统的关键,提供支持系统需求分析、功能分析、架构设计、需求确认和验证活动所需的形式化的建模和模型执行手段。
MBSE引入了综合系统模型的概念,通过系统用例、功能、时序、状态、架构和接口等模型全面反映系统各个方面的属性信息,为系统工程人员提供一种以模型化的系统建模语言(Systems Modeling Language,SysML)为基础的系统行为描述的规范,对系统的各种需求进行可视化的表达和分析,确保不同专业、不同学科、不同角色的工程设计人员基于同一模型快速准确理解、识别、定义、分析、确认、分配需求。
MBSE作为一种新的范式,NASA、美国国防部、欧空局等政府组织和相关承包商积极在项目中应用,IBM等软件和方案提供商也在积极地开展研究,并开发相关的支持环境。
基于模型的系统工程mbse实践入门magicgrid建模方法
基于模型的系统工程mbse实践入门magicgrid建模
方法
基于模型的系统工程(MBSE)是一种以模型为中心的方法,用于描述、分析、设计和优化复杂系统。
它通过使用图形化模型和符号表示系统,以促进跨学科的沟通和协作。
在MBSE实践中,MagicGrid建模方法是一种常用的建模方法,它使用图形化的方式表示系统的结构和行为。
MagicGrid建模方法的基本概念是将系统分解为一系列相互关联的组件和接口,并通过表格的形式表示这些组件和接口之间的关系。
这种表格称为MagicGrid,因为它具有类似于网格的结构。
在MagicGrid中,行表示系统的组件,列表示组件之间的关系。
通过在表格中填写不同的符号和标记,可以描述组件之间的连接、数据流、控制流等关系。
此外,MagicGrid还可以用于表示系统的状态和行为,例如系统的状态转移和事件响应等。
使用MagicGrid建模方法的优点包括:
1. 可视化:MagicGrid以图形化的方式表示系统,使得系统结构和行为更加直观和易于理解。
2. 结构化:MagicGrid将系统分解为组件和接口,有助于组织和描述系统的复杂性。
3. 标准化:MagicGrid遵循统一的符号和标记标准,使得不同人员之间的沟通和协作更加顺畅。
4. 灵活性:MagicGrid可以根据实际需求进行定制和扩展,以适应不同类型的系统和项目。
总之,基于模型的系统工程(MBSE)实践中的MagicGrid建模方法是一种有效的工具,可以帮助团队更好地描述、分析和设计复杂系统。
通过使用MagicGrid,团队可以更好地理解系统的结构和行为,提高沟通和协作的效率,从而更好地满足项目的需求。
谢友柏院士:基于模型的系统工程(MBSE)与设计(MBD)的关系思考

谢友柏院士:基于模型的系统工程(MBSE)与设计(MBD)的关系思考如何将关于功能知识表达的建议与任何系统工程建模语言的任何部分结合起来,确定地、无歧义地表达设计中功能单元或者系统的行为知识和结构知识,将是很有意义的研究。
基于模型的系统工程(model based systems engineering,MBSE)是建模方法的形式化应用,以使建模方法支持系统要求、设计、分析、验证和确认等活动,这些活动从概念性设计阶段开始,持续贯穿到设计开发以及后来的所有寿命周期阶段。
模型是对实际事物的抽象,在人们的生产和生活中经常出现,因此模型非常重要。
实际事物具有难以捉摸的复杂性,不易观察其变化基本规律,不易找到如何统一的对待办法。
抽象是提取其主要共同特征,排除构成复杂性的非主要特征,并据以分类,使能对具有共同特征的一类事物采用相同办法对待。
这个提取物就是区别于实际事物本身的所谓模型,而抽象的操作则称为建模。
为不同目的建模其结果不同,例如,玩具模型是为了愉悦儿童,风洞模型是用于观察物体外形与流动气体之间的关系。
系统是一个由若干相关事、物构成的较为复杂的事、物。
系统工程习惯上意味着一件需要对待的规模巨大的复杂事物,例如生产一种新的商用飞机就是一个系统工程。
系统工程中不仅要对待许多物,更要对待许多事,事往往比物在系统工程中更重要和更为复杂。
系统工程建模要处理的主要是系统中各个事物之间的关系,“系统工程师的技艺在于平衡复杂系统中组织与技术交互作用的艺术和科学。
”系统工程在工程中有很重要的地位,不过它的边界是模糊的,例如它包括设计,但是并不做设计的具体工作;它包括制造,但是也不做产品实施路径的设计和操作实施,它要做的是一个产品全生命周期中各个阶段工作的管理,属于管理学科领域。
MBSE 需要研究和解决的是管理上述交互作用的建模。
所谓事物难以捉摸的复杂性,除各个个体之间的差异以及其随时间和空间的变化之外,还包括人们对于其特征在感觉上的不确定性和差异,对于其特征在以各种自然语言描述和理解时的歧义和不确定性,人们自身在认知方面的矛盾和不确定性。
MBSE建模方法研究_业务、系统和软件建模
MBSE建模方法研究_业务、系统和软件建模MBSE建模方法研究:业务、系统和软件建模概述系统工程是一门跨学科的学科,旨在设计和管理复杂的系统。
在过去的几十年里,随着信息技术和软件的快速发展,系统工程领域也在不断演变和发展。
Model-Based Systems Engineering(MBSE,基于模型的系统工程)方法应运而生,成为一种以建模为核心的系统工程方法。
MBSE主要通过使用图形、文字和数学表达式来描述和分析系统。
1. 业务建模业务建模是MBSE方法中的第一个步骤,它主要关注系统的业务需求和功能。
在业务建模过程中,需要明确系统的目标、任务和功能,并将其以符号化的形式进行表示和描述。
业务建模的目的是为系统工程师提供一个规范和清晰的理解系统的基础,以便在后续的设计和开发过程中能够更好地满足业务需求。
2. 系统建模系统建模是MBSE方法的核心部分,它包括对系统的结构、功能和行为进行建模和分析。
系统模型是一个抽象的描述,能够捕捉系统的组成部分、它们之间的交互关系和行为逻辑。
在系统建模过程中,可以使用多种建模语言和工具,如UML、SysML等。
通过系统建模,可以更好地理解系统的整体架构,分析系统的性能和可靠性,并优化系统的设计和开发过程。
3. 软件建模软件建模是MBSE方法的一个重要环节,它主要关注系统中涉及的软件组件和其与系统的交互。
在软件建模过程中,可以使用统一建模语言(UML)来描述和分析软件的结构、行为和关系。
通过软件建模,可以更好地理解系统中软件的功能和性能需求,并在软件设计中考虑系统的整体特征和需求。
4. MBSE方法的优势MBSE方法相对于传统的系统工程方法具有多个优势。
首先,MBSE方法使用图形化的建模语言和工具,能够更直观地描述和分析系统的结构和行为。
其次,MBSE方法能够提供一个一致、准确的系统模型,方便不同团队之间的协作和沟通。
此外,MBSE方法也为系统工程师提供了一个可靠的测试和验证平台,以便在系统的设计和开发过程中进行模拟分析和预测。
基于模型操作系统的航天器数字孪生系统技术研究
基于模型操作系统的航天器数字孪生系统技术研究范松涛1㊀郝海生2(1.中国航天科技集团有限公司中国空间技术研究院,北京100094;2.精航伟泰测控仪器(北京)有限公司,北京100094)摘要:数字孪生技术目前已得到全球各领域的关注与重视,尤其基于MBSE的数字孪生技术的研究更是国际系统工程领域研究的热点㊂目前数字孪生技术落地实践过程中普遍遇到的共性问题是数字孪生系统都是专用系统,缺乏通用性;同时构建的相关数字孪生体模型缺乏统一的运行格式标准,因此无法在不同用户间复用,造成智力资源的大量浪费㊂从操作系统设计原理入手,为数字孪生体模型统一运行平台的构建提供一种新的思路,并以卫星的数字孪生系统构建为例验证模型操作系统对于构建数字孪生系统的通用性与普适性㊂关键词:模型操作系统;卫星;数字孪生体;基于模型的系统工程;MBSE中图分类号:V46;V57㊀㊀㊀㊀文献标识码:A引用格式:范松涛,郝海生.基于模型操作系统的航天器数字孪生系统技术研究[J].信息通信技术与政策,2021,47(9):8-15.doi:10.12267/j.issn.2096-5931.2021.09.0020㊀引言数字孪生技术目前已得到全球各领域的关注与重视,尤其基于模型的系统工程(Model-Based SystemsEngineering,MBSE)的数字孪生技术的研究更是国际系统工程领域研究的热点㊂国内在载人航天㊁深空探测㊁五代机和大飞机等大工程系统的背景下均大力发展MBSE,而在MBSE的工程实施过程中最核心的关键一环是系统数字孪生体的设计与仿真验证㊂没有数字孪生体设计与仿真验证的研制过程难以实现MBSE,只是割裂基于模型(Model Based,MB)与系统工程(Systems Engineering,SE)内在统一性的孤立模型的集合㊂很多单位在试点实践MBSE的过程中普遍遇到的共性问题就是利用系统建模语言(Systems Modeling Language,SysML)建立了数量庞大的需求模型以及设计分析模型,但系统实现阶段仍使用传统的基于文档驱动的系统工程方法,这种做法获得的MBSE收益很少,反而造成研发团队大量人力资源的浪费,由此形成一系列沉重而难以复用的模型资产负担㊂模型设计人员由于模型设计成果难以在系统实现阶段发挥效力,导致其对系统建模的价值与目标产生怀疑与动摇,使MBSE落地实践阻力重重㊂MBSE中的系统数字孪生体模型的设计与仿真验证工作主要是为了尽可能逼近数字孪生体模型对应的物理实物的信息域以及物理域的属性,会涉及多维多域模型的混合设计和仿真工作,除此之外,还需加上时域上的同步问题,即使对工程问题进行近似㊁转换㊁归一等简化处理,也是一项极其复杂的工作㊂针对上述问题,目前业界传统的解决方案是搭建一体化设计仿真平台,将多种建模仿真工具软件进行集成,利用数据软总线的方式打通工具间的接口,实现平台内工具软件的互联互通㊂但该技术路线目前进展十分缓慢,究其原因主要体现在4个方面:工具视角的解决方案难以成为模型统一的运行平台,无法形成模型生态;多个工具的集成互联难度极大,包括接口的互联互通㊁解算器的同步以及系统模型的调试;缺乏模型运行态标准,导致同一类模型针对不同工具反复开发;无法满足大规模分布式系统仿真场景㊂图1㊀ModelOS 系统组成图基于上述问题,本文创新性地提出了模型操作系统概念与设计原理,设计了面向数字孪生时代的数字孪生体模型运行所需的一种操作系统架构,为解决MBSE 的数字孪生技术落地实践提供了一种不同于传统仿真工具视角的模型操作系统创新解决方案,同时在文中以互联网卫星数字孪生系统的构建为应用案例来验证模型操作系统对于构建数字孪生系统的通用性与普适性㊂1模型操作系统的定义、架构及特点1.1㊀模型操作系统的定义与架构模型操作系统(Model Operating System ,ModelOS )是运行于操作系统之上的一种元操作系统(Meta Operating System ),为数字孪生体模型提供统一的运行与管理平台㊂模型操作系统为数字孪生体模型中各尺度子数字孪生体模型以及信息域㊁能量域㊁物质域的多维度模型提供统一的运行与同步管理机制,并在数字时空中完整映射对应物理实体的信息流㊁能量流以及物质流的变化过程㊂模型操作系统为数字孪生体模型提供三维几何空间管理以及统一的时间管理,并实现信息物理系统抽象层为数字孪生体模型与对应物理实体的实时数字孪生映射提供虚实数据交互机制,其系统组成如图1所示㊂(1)操作系统抽象层:对基础操作系统的系统调用进行标准的消息服务抽象,实现ModelOS 与基础操作系统解耦㊂(2)信息物理空间抽象层:对基础操作系统的I/O 驱动调用进行标准的消息服务抽象,实现ModelOS与I/O硬件解耦㊂(3)模型调度器:对数字孪生体模型的执行令牌进行调度管理,为数字孪生体模型分配计算资源㊂(4)面向模型的分布式软总线:基于分布式的数据发送与订阅机制实现数字孪生体模型间的数据通讯㊂(5)模型时间管理:数字孪生体模型的系统时钟管理以及数字孪生体模型之间的仿真周期同步管理㊂(6)模型空间管理:数字孪生体模型的存储空间以及三维几何空间的管理,并提供空间的碰撞检测机制㊂(7)模型间相互作用机制:模拟数字孪生体模型的能量模型间的相互作用机制,并提供物理引擎的分布式管理㊂(8)模型间信息流映射机制:基于信息交互机制的数字孪生孪生体模型的信息传递与转换㊂(9)模型间能量流映射机制:基于物理引擎解算实现数字孪生体模型的能量模型相互作用时的能量变化过程㊂(10)模型间物质流映射机制:基于能量域的变化解算物质域的状态变化㊂(11)模型管理:提供统一的数字孪生体模型管理机制㊂(12)模型系统服务:为数字孪生体模型提供通用的系统服务㊂(13)三维用户界面(User lnterface,UI)管理:提供数字孪生体的三维显示与人机交互机制㊂1.2㊀模型操作系统的特点模型操作系统是数字时空升维的必然产物,数字孪生时代的到来意味着数字时空正式开始从三维时空升级为四维时空㊂借助数字孪生技术,四维数字时空与我们所处的物理时空开始全面融合,因此对操作系统的运行机制也提出了崭新的要求㊂数字时空与操作系统的协同发展情况如表1所示㊂表2则以Linux操作系统为例,主要阐述了模型操作系统与传统的操作系统本质的区别㊂表1㊀数字时空与操作系统的协同发展数字时空代表性操作系统平台二维时空(一维空间+时间)DOS三维时空(二维空间+时间)Windows/Linux/IOS/Android 四维时空(三维空间+时间)模型操作系统2基于模型操作系统构建数字孪生系统2.1㊀数字孪生体模型数字孪生体作为数字孪生技术的核心,其定义在学术领域也尚未形成明确的共识,而数字孪生体模型的可执行格式标准以及数字孪生体模型的通用运行平台更是空白,该问题造成目前的数字孪生系统都是专用系统,并且数字孪生体模型难以在不同的单位之间传递与复用,成为数字孪生技术实践落地的严重障碍㊂以互联网卫星为例,作为国家战略性工程,为了应对国际竞争,需要采用数字孪生技术大幅提升卫星的研制效率以及运维效率,但由于缺乏数字孪生体模型标准以及通用的数字孪生体运行平台,从用户到整个供应链都难以实现完整的数字孪生体模型的传递㊁仿真与表2㊀模型操作系统与传统操作系统的区别操作系统机制模型操作系统Linux 操作系统类型元操作系统基础操作系统时空管理四维时空(三维空间+时间)三维时空(二维空间+时间)管理对象数字孪生体模型进程与线程调度算法基于时间片的周期性调度与基于事件触发的抢占式调度FIFO㊁时间片轮转㊁基于优先级的抢占式调度物理世界模拟程度信息域㊁能量域以及物质域的模拟信息域的模拟UI交互三维空间交互二维空间交互与物理世界的交互通过信息物理空间抽象层交互通过I/O驱动层交互复用,只能实现特定维度的孤立模型的传递与复用,无法有效获得数字孪生技术所带来的收益㊂目前,国际上关于数字孪生体的定义通常有如下几种㊂(1)美国的Michael Grieves认为数字孪生体是一组虚拟信息结构,可以从微观原子级别到宏观几何级别全面地描述潜在或实际的物理制成品[1]㊂(2)ISO23247标准认为数字孪生体是通过可见制造元素和以适当同步的数字表达融合的手段[2]㊂(3)美国工业互联网联盟认为数字孪生是资产㊁过程或系统的正式数字表示,能捕获对应实体的属性和行为,并在特定语义中进行通信㊁存储㊁解释或处理㊂数字孪生包括但不限于物理模型和数据㊁分析模型和数据㊁时间序列数据和历史㊁业务数据㊁主数据㊁可视化模型和各种计算这几类信息的组合[3]㊂(4)美国国家航空航天局的Edward Glaessgen认为数字孪生体是用来镜像孪生体中相应实物运行系统的全生命周期过程,是利用已完工的载具或系统的最佳可用物理模型㊁传感器更新数据以及机队历史数据集成的多物理域㊁多尺度㊁概率化的仿真[4]㊂(5)中国数字孪生体联盟认为数字孪生体是物理世界和数字空间交互的概念体系,是一种通用目的技术[5]㊂在本文中,ModelOS定义的数字孪生体模型是对具有空间属性及物理属性的物理实物的数字化映射,是按照物理实物的系统结构组织的计算机可识别与运行的多尺度数字孪生体模型与多维度模型(信息域模型㊁能量域模型㊁物质域模型)组成的相关联的模型集合㊂ModelOS定义的数字孪生体模型(Digital Twin Model,简写为DT)的具体结构定义如下㊂(1)Scheduler:包括Token_DT_Execute与Token_ DT_Update两种令牌㊂Token_DT_Execute:获得该令牌意味着当前DT获得计算资源,DT的状态进入运行态;Token_DT_Update:当所有子DT间的相互作用处理完毕后,获得该令牌,使得当前DT以及上一级DT 的状态可以被更新㊂(2)State:标识DT的状态,包括就绪态㊁执行态㊁阻塞态以及挂起态㊂(3)Flag:包括Atom与Power两种Bool类型标志㊂Atom:表示当前DT是否为原子DT,如果Atom为1,则表示当前DT为原子DT,不再包含子DT,否则需要根据DT的结构模型进一步遍历子DT;Power:表示当前DT是否加电,如果Power为1,则表示加电,相应DT的信息域模型在DT获得Token_DT_Execute后将会被执行,否则不会被执行㊂(4)INFO_Struct㊁ENGY_Struct㊁MATR_Struct:表征由子DT构成的信息域㊁能量域㊁物质域模型结构,即INFO_Struct_V㊁ENGY_Struct_V㊁MATR_Struct_V;表征本级DT多维度模型的组成以及模型间的关系,即INFO_Struct_H㊁ENGY_Struct_H㊁MATR_Struct_H㊂(5)INFO㊁ENGY㊁MATR:即信息域模型㊁能量域模型㊁物质域模型㊂信息域模型的变化过程以及子DT 信息模型间的通信过程模拟物理实物的信息流变化过程;能量域模型的变化过程以及子DT能量模型间的相互作用过程模拟物理实物的能量流变化过程;物质域模型的变化过程模拟物理实物的物质流变化过程㊂每个INFO㊁ENGY㊁MATR的模型都由Init_State㊁Cur_ State以及Process三个要素构成㊂(6)Interaction:用于处理DT间能量域的相互作用,关联相应维度模型所需用到的物理引擎实现物理解算㊂ModelOS定义的数字孪生体模型的特点是表征数字孪生体在信息流㊁能量流与物质流作用下的模型状态变化,并且可表达体系模型(System of System Model)㊁系统模型(System Model)㊁子系统模型(Sub-System Model)㊁部件模型(Compenent Model),甚至无限细分的细尺度模型,用户只需按照实际任务要求以及算力限制,将原子模型定义到相应尺度即可㊂数字孪生体模型结构定义如图2所示㊂2.2㊀数字孪生体模型的运行ModelOS中的DT都采用统一的运行范式,这样可真正实现DT的即插即用,避免因为DT的差异频繁修改代码㊂DT运行范式如图3所示㊂空间互联网星座系统主要包含空间段㊁地面段㊁用户段㊂空间段采用用户灵活接入㊁星间高速互联㊁系统弹性高效的空间混合星座网络架构,实现全球宽带互联网和移动通信服务能力㊂地面段面向多用户㊁多业务㊁全球化的服务需求,主要完成星座运行管理㊁星地一体化网络管理㊁全球站网管理㊁用户终端管理㊁全球运营服务支撑等任务;工作领域细分为运行控制中心㊁网络管理中心㊁运营服务中心㊁全球信关站网,通过地面通信网络实现互联互通㊂用户段按照 终端模块设㊀㊀㊀图2㊀数字孪生体模型结构定义图图3㊀DT运行范式计㊁系统开放扩展 等设计原则,开展终端结构化设计㊁应用平台化集成㊁数据云化配置等工作[6]㊂按照上述空间互联网星座的构成,卫星互联网物质域的结构模型SatelliteNetworkDT.MATR_Struct_V 如图4所示㊂如果用户希望将仿真尺限定于子系统级粒度,则只需将PayloadDT模型㊁PlatformDT模型的Atom标志设置为1,然后在相同周期内ModelOS将会调度并遍历运行SatelliteNetworkDT中的每一个子DT,直到PayloadDT域PlatformDT,具体运行过程如图5所示㊂(1)SOS Level:SatelliteNetworkDT㊂(2)System Level:ComTerminalDT和SatelliteDT㊂(3)SubSystem Level:PayloadDT和PlatformDT㊂(4)模型等效Playload星载计算机软件处理过程㊂(5)PlayloadDT.ENGY模型包括运动模型㊁无线信号强度模型与系统功耗模型㊂(6)PlayloadDT.MATR模型为Payload几何模型㊁Payload子系统中各部件的安装矩阵㊁天线方向图模型㊂(7)模型等效Platform综合电子计算机软件处理过程㊂(8)PlatformDT.ENGY模型包括运动模型㊁太阳能充电模型与系统功耗模型㊂(9)PlatformDT.MATR模型为Platform几何模型㊁Platform子系统中各部件的安装矩阵㊁太阳帆板参数模型㊂上述SatelliteNetworkDT可完成互联网卫星链路余量仿真评估分析㊁互联网卫星覆盖率仿真评估分析㊁互联网卫星链路切换对通信终端通信服务影响的仿真㊀㊀图4㊀卫星互联网物质域结构图图5㊀互联网卫星的数字孪生体模型运行过程评估分析㊁互联网卫星的节能策略仿真评估分析㊁卫星互联网综合测运控策略仿真评估分析等任务㊂DT 在ModelOS 中按照四态模型(就绪态㊁运行态㊁阻塞态㊁挂起态)进行调度,调度过程的DT 状态迁移过程如图6所示㊂图6㊀DT 全生命周期的状态迁移图3结束语本文利用操作系统的设计思想构建了一种数字孪生体模型的统一运行平台 模型操作系统,并提出了可运行的ModelOS 数字孪生体模型定义与架构,真正实现数字孪生体模型的即插即用㊂模型操作系统提供了将不同尺度数字孪生体以及信息域㊁能量域㊁物质域等不同维度的仿真模型综合链接为一个完整的数字孪生体模型进行运行解算,在数字环境下全面映射物理实体的功能㊁性能㊁空间属性以及物理属性,实现物理实体的数字化镜像,有效克服了目前MBSE 领域普遍存在的模型散乱,难以系统仿真验证的问题㊂模型操作系统诞生于航天MBSE 工程实践,因此首先用于解决航天的数字孪生体模型应用问题,可以用于互联网卫星等航天器的数字化设计与仿真验证以及航天器的数字孪生伴飞,同时也可用于供应链间数字孪生体模型的交付㊁流转与仿真验证㊂未来模型操作系统还将用于构建各种类型智能复杂系统的数字孪生系统㊂参考文献[1]Michael Grieves ,John Vickers .Digital twin :mitigatingunpredictable ,undesirable emergent behavior in complexsystems [M ].SpringerInternationalPublishingSwitzerland ,2017.[2]ISO .ISO (DIS )23247-1:automation systems andintegration -digital twin framework for manufacturing -part 1:overview and general principles [S ],2020.[3]An Industrial Internet Consortium .Digital twins forindustrial applications (Version 1.0)[R ],2020.[4]Glaessgen E H ,Stargel D S .The digital twin paradigmfor future NASA and U .S .air force vehicles [C ]//Paper for the 53rd Structures ,Structural Dynamics ,and Materials Conference :Special Session on the DigitalTwin ,2012.[5]胡权.数字孪生体第四次工业革命的通用目的技术[M ].人民邮电出版社,2021.[6]李峰,禹航,李伟,等.我国空间互联网星座系统发展战略研究[J ].中国工程科学,2021,23(4):137-144.[7]Lenny Delligatti .SysML distilled :a brief guide to thesystems modeling language [M ].Pearson Education .Inc ,2014.[8]Birgit Boss ,Somayeh Malakuti .Digital twin and assetadministration shell concepts and application in the Industrial Internet and Industrie 4.0[R ],2020.[9]王曦爽,孟新.卫星网络仿真系统建模的研究[J ].计算机工程与应用,2004(23):142-144+208.作者简介:范松涛㊀中国航天科技集团有限公司中国空间技术研究院总体设计部研究员,型号副总师,研究领域为载人航天器系统设计㊁基于模型的系统工程㊁信息系统工程㊁软件工程等郝海生㊀精航伟泰测控仪器(北京)有限公司创始人,曾就职于中国空间技术研究院北京控制工程研究所,主持研发星船用实时操作系统SpaceOS1.0,目前主要研究领域为基于MBSE的数字孪生设计技术和面向模型的操作系统实现原理Research on spacecraft digital twin system technologybased on model operating systemFAN Songtao1,HAO Haisheng2(1.China Academy of Space Technology,China Aerospace Science and Technology Corporation,Beijing100094,China;2.Jing Hang Wei Tai Automatic Test Equipment(Beijing)Co.,Ltd.,Beijing100094,China)Abstract:Digital twin technology has now received attention from various fields around the world,especially the research of digital twin technology based on MBSE is a hot spot in the field of international systems engineering.The common problem commonly encountered in the current implementation of digital twin technology is that the digital twin systems are all dedicated systems and lack versatility.At the same time,the related digital twin models built at the same time lack a unified operating format standard,so they cannot be replicated between different users,resulting in a lot of waste of intellectual resources.This article starts with the operating system design principles,provides a new idea for the construction of a unified operating platform for the digital twin model,and takes the construction of the satellite digital twin system as an example to verify the universality of the model operating system for the construction of the digital twin system.Keywords:model operating system;satellite;digital twin;model-based system engineering;MBSE(收稿日期:2021-08-15)。
基于模型的系统工程设计(MBSE)为您

基于模型的系统工程设计 (MBSE) 为您提供帮助的 3 种方式
∙应对复杂性
∙鼓励重复使用
∙管理产品线
∙复杂性通常是系统工程设计难题的根本原因。
通过使用系统的可视表示形式,您将更容易发现和管理系统的不同部分之间的关系。
此可视参考为整个系统的设计、分析、校验和认证提供支持。
该模型提供了工程学科的通用参考,使团队可以在开发过程中更轻
Tech-Clarity 的系统工程设计买方指南:系统工程设计解决方案专业指南概述了将支持系统工程设计(包括 MBSE)的软件要求。
下载该指南以获取核对清单,从而帮助您选择正确的解决方案,令系统工程设计在您的公司获得成功(包括支持 MBSE 的要求)。
基于模型的系统工程(MBSE)的案例研究,第 1 部分_ IBM Rational Harmony 的集中式系统模型
IBM BluemixRational Harmony 系统工程中基于模型的系统工程Rational Harmony for Systems Engineering 使您能够识别并推导出所需的系统功能,还能够确定相关的系统模式和状态。
此外,您还可以将已确定的系统功能和状态分配给子系统结构,并确定跨子系统的端口和接口。
图 1 显示了您在每个工程阶段为了完成系统设计而必须执行的基本输入和输出。
图 1. 工程阶段的生命周期在功能分析阶段,通过一个活动图定义用例的功能流。
然后,从活动图推导出用例场景。
各场景通过一组序列图表示,创建用例块的端口和接口时需要用到它们。
最后,用例基于状态的行为被捕获为一个状态图。
在架构设计阶段,选定的系统块被分解成几部分。
最终的系统结构被捕获在 SysML 块定义图 (BDD) 和SysML 内部块图 (IBD) 中。
每个用例分配都可以通过一个关联的白盒活动图以图形的形式表示。
下图是用例的黑盒活动图的副本,但它被划分为泳道 (swim lane)。
每条泳道代表分解层次的一个块。
然后,根据选定的设计理念,将操作 “移动” 到各自的块泳道。
这种分配的一个基本要求是要求维护操作之间的初始链接(功能流)。
最后,详细架构设计阶段的重点是端口和接口的定义,以及在架构分解的最低层,系统块基于状态的行为的定义。
设计流程/大纲UAV 地面站的系统要求被划分成两个用例,如图 2 所示。
为了实现可追溯性,需要将已确定的系统要求与相关的用例相关联。
在本文中,假设已经完成需求分析。
对于本案例研究,我们将重点关注 Uc1 PerformAreaSearch 用例。
图 2. UAV 管理系统用例图功能分析用例的功能流涵盖的方面包括:将搜索分配给选定的 UAV、接收来自 UAV 传感器的追踪信息、保持系统追踪信息与传感器追踪信息一致、维护所需要的传感器追踪信息更新历史、允许操作员中止搜索。
您可以使用该工具在黑盒活动图中详细说明每个功能流,如图 3 所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
IBM BluemixRational Harmony 系统工程中基于模型的系统工程Rational Harmony for Systems Engineering 使您能够识别并推导出所需的系统功能,还能够确定相关的系统模式和状态。
此外,您还可以将已确定的系统功能和状态分配给子系统结构,并确定跨子系统的端口和接口。
图 1 显示了您在每个工程阶段为了完成系统设计而必须执行的基本输入和输出。
图 1. 工程阶段的生命周期在功能分析阶段,通过一个活动图定义用例的功能流。
然后,从活动图推导出用例场景。
各场景通过一组序列图表示,创建用例块的端口和接口时需要用到它们。
最后,用例基于状态的行为被捕获为一个状态图。
在架构设计阶段,选定的系统块被分解成几部分。
最终的系统结构被捕获在 SysML 块定义图 (BDD) 和SysML 内部块图 (IBD) 中。
每个用例分配都可以通过一个关联的白盒活动图以图形的形式表示。
下图是用例的黑盒活动图的副本,但它被划分为泳道 (swim lane)。
每条泳道代表分解层次的一个块。
然后,根据选定的设计理念,将操作 “移动” 到各自的块泳道。
这种分配的一个基本要求是要求维护操作之间的初始链接(功能流)。
最后,详细架构设计阶段的重点是端口和接口的定义,以及在架构分解的最低层,系统块基于状态的行为的定义。
设计流程/大纲UAV 地面站的系统要求被划分成两个用例,如图 2 所示。
为了实现可追溯性,需要将已确定的系统要求与相关的用例相关联。
在本文中,假设已经完成需求分析。
对于本案例研究,我们将重点关注 Uc1 PerformAreaSearch 用例。
图 2. UAV 管理系统用例图功能分析用例的功能流涵盖的方面包括:将搜索分配给选定的 UAV、接收来自 UAV 传感器的追踪信息、保持系统追踪信息与传感器追踪信息一致、维护所需要的传感器追踪信息更新历史、允许操作员中止搜索。
您可以使用该工具在黑盒活动图中详细说明每个功能流,如图 3 所示。
图 3. 黑盒活动图图 3 的大图用例场景您可以看到,活动图中的每个流都表示一个不同的用例场景。
这些流不仅能帮助我们详细了解功能流中的操作,还能形成在各个开发阶段验证用例行为的基础。
在图 4 所示的五个场景中,您可以通过其中三个场景获得我们的用例。
图 4. 黑盒用例场景图 4 的大图用例状态图在下一步中,您可以使用序列图获得端口和接口。
获得端口和接口之后,必须在状态图中捕捉用例的状态行为。
最后,为了设定用例的黑盒行为的基线,需要执行状态机,并且将生成的序列图与刚才创建为场景的序列图进行对比。
本用例的状态机如图 5 所示。
图 5. 黑盒状态图图 5 的大图状态 “Search Executed” 有两个 ‘and' 子状态:“Perform Sensor Track Management 执行传感器追踪信息管理” 和 “Perform History Check”。
第一个子状态支持追踪信息的建立或更新,第二个子状态清除大于 30 分钟的传感器追踪信息历史,如果传感器追踪信息没有历史记录,则清除传感器追踪信息本身。
架构设计在架构设计阶段,您需要重点关注结构分解,以及如何将操作和行为分配给子系统组件。
首先,我们描述了将系统结构性分解成子系统的系统 BDD(参见图 6),然后我们将获得 Use Case White-Box ActivityDiagram,并通过它将用例的操作分配给分解后的子系统(参见图 7)。
当将系统分解成子块后,它会以关键系统功能的定义为基础。
这一阶段的目标是对系统功能进行分组,每个组可以通过一个子系统组件实现。
第一步是将相关的系统功能划分为关键系统功能。
对于本用例,我们通过用例黑盒活动图的分析,确定了以下三个关键系统功能:管理传感器追踪信息控制人机界面执行历史管理图 6. UAV 管理系统 BDD考虑到要使用一些关键系统功能,我们获得了如图 6 所示的 BDD。
因为我们有子系统块,所以接下来的任务是在各个泳道中执行分配操作,以描绘每个独立的子系统块。
以下是重要的分配规则:如果您无法将操作分配到单个块,那么必须将操作分解。
在这种情况下,已分解的相关业务必须通过各自的依赖关系链接到父操作。
您可以将一个系统级的操作分配到多个块。
在这种情况下,需要将相关的操作复制到相应的块泳道,并将它们集成到功能流中。
图 7. 白盒活动图图 7. 白盒活动图图 7. 白盒活动图在图 7 中,与操作员交互相关的操作已包含在人机界面 (MMI) 控制器组件中。
同样,与创建、更新和处理传感器追踪信息相关的操作被分配到 Track Manager 泳道。
而与历史数据管理有关的操作都推送到 History Manager 泳道。
在将连续流拆分成两个块的地方,可以利用消息操作来表示从一个块到另一个块的转发请求。
这种模式的一个示例是,从 History Manager 组件到 Track Manager 组件的消息操作purgeSensorTrack(),该操作请求后一个组件执行 disposeSensorTrack()。
现在,已将操作分配给泳道,下一步就是执行具体的架构设计。
具体的架构设计在进行具体的架构设计阶段,需要重点关注端口和接口的定义,以及实现子系统块基于状态的行为。
为了做到这一点,必须使用白盒序列图确定所子系统块的端口和接口。
黑盒活动图的重点是确定不同的系统功能(操作)流,而白盒活动图的重点则是不同子系统之间的协作,同时还要考虑到操作的分配。
接收到服务请求定义一个块的接口。
在定义了端口和接口后,必须将所产生的每个叶块基于状态的行为捕获到某个状态图中。
代理白盒序列图如图 8 所示。
序列图显示一个子系统块为了满足场景而向另一个子系统块请求的服务。
图 8. 白盒序列图图 8. 白盒序列图图 8. 白盒序列图图 8 的大图我们继续使用白盒序列图来获得子系统之间的端口和接口,并获得代理子系统组件基于状态的行为,如图9、图 10 和图 11 所示。
图 9. MMI 控制器状态图 9 的大图图 10. 追踪信息管理器的状态图图 10 的大图图 11. 白盒端口和接口参考资料学习查看本系列的第 2 部分:为分布式系统的分析和设计开发以数据为中心的流程Systems Engineering Best Practices with the Rational Solution for Systemsand Software Engineering ,作者:Hans Peter Hoffman ;工具书版本访问 developerWorks 的 Rational 软件专区,获得 Rational SoftwareDelivery Platform 产品的技术资源和最佳实践。
随时关注 developerWorks 技术活动和网络广播,包括各种 IBM 产品和 IT 行业主题。
参加 developerWorksLive! 技术讲座,快速了解 IBM 产品和工具,以及 IT行业趋势。
观看 developerWorks 演示中心,其中包括面向初学者的产品安装和设置演示,以及为经验丰富的开发人员准备的高级功能。
提高您的技能。
查看 Rational 培训和认证 目录,其中包含了许多广泛议题的课程类型。
您可以随时随地学习它们,许多 “入门” 课程是免费的。
IBM Bluemix 资源中心文章、教程、演示,帮助您构建、部署和管理云应用。
developerWorks 中文社区立即加入来自 IBM 的专业 IT 社交网络。
Bluemixathon 挑战赛为灾难恢复构建应用,赢取现金大奖。
图 11 的大图结束语我们描述了如何通过案例研究来应用 Rational Harmony 系统工程流程。
从系统工程切换到后续系统开发的关键构件是一个可执行基线模型。
该模型是生成规范文档和操作 ICD 的资料库。
切换包中包含下列项目:可执行子系统模型的基线子系统已分配的操作的定义子系统端口和逻辑 接口的定义子系统行为的定义,捕获在状态图中测试场景,从系统级用例场景中获得获得产品和技术下载IBM WebSphere UDDI 注册中心预览版 FAQs的 Rational 软件。
以最适合您的方式IBM 产品评估试用版软件:下载产品试用版,在线试用产品,在云环境下试用产品,或者在IBM SOA 人员沙箱中花费几个小时来学习如何高效实现面向服务架构。
讨论加入Rational 软件论坛,提出问题并参与讨论。
评分或评论 Rational 软件。
以这种方式进行评分或评论很简单。
通过撰写一篇 developerWorks 文章,分享您的知识并帮助其他使用Rational 软件的人。
了解好的 developerWorks 文章有何特点,以及如何写出好文章。
在Facebook、Twitter (@ibmrational) 和YouTube上关注 Rational 软件,并发表您的评论和请求。
加入Rational 论坛、Rational cafés和wikis,提出问题并回答问题,提高您的专业知识。
获得思想领袖的社交网络。
加入Rational 社区,分享您的 Rational 软件专业知识,并获得与同行的联系。