雷达终端
气象雷达终端显示使用方法(1)
兰州DWSR2500C多普勒气象雷达塔台终端使用说明1.雷达开机
如图:
power:电源,即设备加电;
servo:伺服,即天线转动;
Radiate:高压,即发射电磁波;
当三键均为“off”状态时,设备停止工作;
当三键均为“on”状态时,设备正常工作,此时,塔台管制员方可观察实时天气信息;
2.方位仰角
如图:
Azimuth:天线扫描方位角度显示;
Elevation:天线扫描俯仰角度显示;
塔台管制员可从此区域获取雷达天线扫描位置信息;
3.天气状况实时显示
1)PPI强度显示图,如图:
图片分两部分,左边部分为色标尺;右边部分为PPI强度扫描图
左边部分注意两点:
1.单位“dbz”表示此色标尺为强度色标尺,指示强度信息;
2.色标尺:从下至上,值越大,表示天气状况越恶劣;
右边部分注意两点:
1.雷达正常工作时,天线转动扫描显示的回波为实时图像;
2.图像中点(即圆心)为雷达所处位置;
2)PPI速度显示图,如图:
图片分两部分,右边部分为色标尺;左边部分为PPI速度扫描图
右边部分注意两点:
1. 单位“m/s”表示此色标尺为速度色标尺,指示风速信息;
2. 色标尺:
正数(Away):表示此时径向风向远离雷达;值越大,径向风速越大
负数(Towards):表示此时径向风向朝向雷达;值越大,径向风速越大
左边部分注意两点:
1. 雷达正常工作时,天线转动扫描显示的回波为实时图像;
2. 图像中点(即圆心)为雷达所处位置。
雷达的基本组成

雷达主要由天线、发射机、接收机、信号处理机和终端设备等组成。
雷达发射机产生辐射所需强度的脉冲功率,其波形是脉冲宽度为K而重复周期为T的高频脉冲串。
发射机现有两种类型:一种是直接震荡式(如磁控管振荡器),它在脉冲调制器控制下产生的高频脉冲功率被直接馈送到天线;另一种是功率放大式(主振放大式),它是由高稳定度的频率源(频率综合器)作为频率基准;在低功率电平上形成所需波形的高频脉冲串作为激励信号,在发射机中予以放大并驱动末级功放而获得大的脉冲功率来馈给天线的。
功率放大式发射机的优点是频率稳定度高且每次辐射式相参的,这便于对回波信号进行相参处理,同时也可以产生各种所需的复杂脉压波形。
发射机输出的功率馈送到天线,而后经天线辐射到空间。
脉冲雷达天线一般具有很强的方向性,以便集中辐射能量来获得较大的观测距离。
同时,天线的方向性越强,天线波瓣宽度越窄,雷达测向得精度和分辨力就越高。
常用的微波雷达天线是抛物面反射体,馈源放置在焦点上,天线反射体将高频能量聚成窄波束。
天线波束在空间的扫描常采用机械转动天线来得到,由天线控制系统来控制天线在空间的扫描,控制系统同时将天线的转动数据送到终端设备,以便取得天线指向的角度数据。
根据雷达用途的不同,波束形状可以是扇形波束,也可以是针状波束。
天线波束的空间扫描也可以采用电子控制的办法,它比机械扫描的速度快,灵活性好,这就是20世纪末开始日益广泛使用的平面相控阵天线和电子扫描的阵列天线。
前者在方位和仰角两个角度上均实行电扫描;后者是一位电扫描,另一维为机械扫描。
脉冲雷达的天线是收发共用的,这需要高速开关装置,在发射时,天线与发射机接通,并与接收机断开,以免强大的发射功率进入接收机把接收机高放混频部分烧毁;接收时,天线与接收机接通,并与发射机断开,以免微弱的接收功率因发射机旁路而减弱。
这种装置称为天线收发开关。
天线收发开关属于高频馈线中的一部分,通常由高频传输线和放电管组成,或由环行器及隔离器等来实现。
5.4__雷达终端显示器和录取

一、雷达终端显示器 功用:
用来显示雷达所获取的目标信息和
情报,显示的内容包括目标的位置及其
运动情况,目标的各种特征数等。
(一)显示器的类型
1、距离显示器 A型显示器、J型显示器、A/R型显示器 2、平面显示器 平面显示器(PPI) 偏心PPI显示器 B式显示器 3、高度显示器 4、综合显示器
(四)目标距离数据的录取
若计数脉冲频率为f,距离取样间隔 τR=1/f,由读出的距离数码N,可确定目 标延迟时间tR和目标的距离R: tR≈NτR R=c tR /2≈cNτR/2
结论:
利用计数器将时间的长短转换成 二进制数码,由目标迟后于发射脉 冲的延迟时间tR来决定计数时间的长 短,使计数器中所计的数码正比与tR, 读出计数器中的数,就可以得到目 标的距离数据。
飞行数据处理器的功能包括:
① 国际航空电信电报数据的自动处理; ② 飞行计划数据输入、修改和分配,飞行 计划的生成; ③ 重复飞行计划数据库管理; ④ 改变航路; ⑤ 自动和人工二次雷达代码管理和分配;
⑥ 自动激活和飞行计划期限管理,路径处 理、航路的输入和更新,航路变换,处 理更新的固定点及航线,冲突检测等, 飞行进程单及文件式飞行数据图形显示; ⑦ 天气数据的输入和修正; ⑧ 飞行进程列表; ⑨ 飞行进程单自动分配打印和显示; ⑩ 飞行数据的统计和累加。
5、计算机图形显示
计算机图形显示系统组成框图
计算机
信号控制、处 理、存储电路 显示读 出装置 可见数据
管制员
计算机通信装置
操作动作
计算机: 完成雷达系统的计算处理工作,将各种输入 数据加工整理成显示档案并送往信号控制、处 理、存储电路进行图形处理。
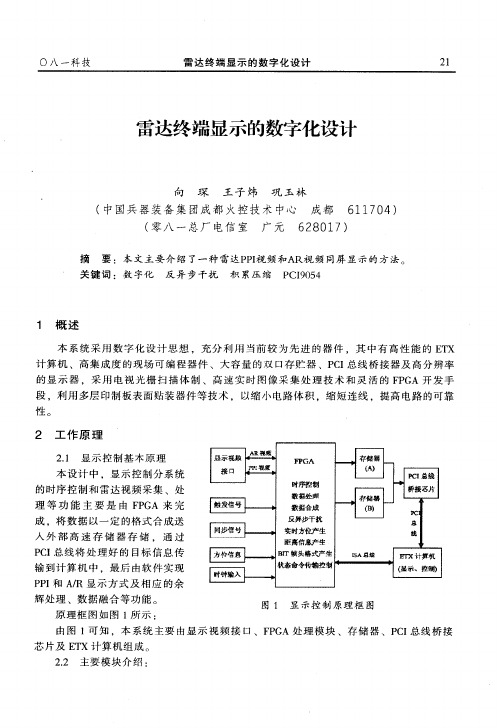
雷达终端显示的数字化设计
关 键 词 :数 字化
反 异 步干扰
积 累压 缩
P 10 4 C95
1 概 述
本 系 统 采 用 数 字 化 设 计 思 想 , 充 分 利 用 当 前 较 为 先 进 的 器 件 ,其 中 有 高 性 能 的 E X T
PI P 显示 而言 ,对其进行 一定 探测 周期 的同一距 离单 元 的积 累是非 常必要 的 。 当然 ,该 积
累周期 也不 可能太多 ,否则会 造成在 积累 时间 内天线 转过 的角 度过大 。所 以要 选择 合适 积 累处理 周期 ;距 离上 ,在满足显 示精度 的情况 下 ,尽 可能 的选择 大的压 缩 比。 积 累压缩 处理 的顺序 :按先 积 累后 压缩 的 原则进 行 进行 处理 。 积累采 用非 相关 积 累 ;
O八 一 科 技
雷 达 终 端 显 示 的 数 字 化 设 计
2 1
雷达终 端显示的数字化设计
向 琛 王 子 炜 巩 玉林
( 国兵器 装 备 集 团成 都 火控 技 术 中心 成 都 6 7 4) 中 1 1 0
( 八 一 总厂 电信 室 广 元 6 8 1 零 2 0 7)
反 异步噪声干扰 控制 和数据处理 部分 。
1 . 反异 步噪声干 扰
反 异步噪声 干扰 ,就 是将 回波信息 中附带 的随机噪声 去掉 的过程 。假设 目标 的运 动速
度 为 5 O /,一个 P F脉 冲周期 为 7 0 s 0ms R 0 u ,则 经过 一个 周期 ,目标 运 动 的距 离 为 03 m, .5 因此可 以认为 目标 位置不 变 。而 随机噪声 的位置是 随机 变化 的 ,利用这 一特性 ,将 回波进
雷达基本理论与基本原理

雷达基本理论与基本原理一、雷达的基本理论1、雷达工作的基本过程发射机产生电磁信号,由天线辐射到空中,发射的信号一部分被目标拦截并向许多方向再辐射。
向后再辐射回到雷达的信号被天线采集,并送到接受机,在接收机中,该信号被处理以检测目标的存在并确定其位置,最后在雷达终端上将处理结果显示出来。
2、雷达工作的基本原理一般来说,会通过雷达信号到目标并从目标返回雷达的时间,得到目标的距离。
目标的角度位置可以根据收到的回波信号幅度为最大时,窄波束宽度雷达天线所指的方向而获得。
如果目标是运动的,由于多普勒效应,回波信号的频率会漂移。
该频率的漂移与目标相对于雷达的速度成正比,根据2rd v f λ=,即可得到目标的速度。
3、雷达的主要性能参数和技术参数 雷达的主要性能参数 雷达的探测范围雷达对目标进行连续观测的空域,叫做探测范围,又称威力范围,取决于雷达的最小可测距离和最大作用距离,仰角和方位角的探测范围。
测量目标参数的精确度和误差精确度高低用测量误差的大小来衡量,误差越小,精确度越高,雷达测量精确度的误差通常可以分为系统误差、随机误差和疏失误差。
分辨力指雷达对两个相邻目标的分辨能力。
可分为距离分辨力、角分辨力(方位分辨力和俯仰角分辨力)和速度分辨力。
距离分辨力的定义:第一个目标回波脉冲的后沿与第二个目标回波脉冲的前沿相接近以致不能分辨出是两个目标时,作为可分辨的极限,这个极限距离就是距离分辨力:min ()2c R τ∆=。
因此,脉宽越小,距离分辨力越好数据率雷达对整个威力范围完成一次探测所需时间的倒数。
抗干扰能力指雷达在自然干扰和人为干扰(主要的是敌方干扰(有源和无源))条件下工作的能力。
雷达可靠性分为硬件的可靠性(一般用平均无故障时间和平均修复时间衡量)、软件可靠性和战争条件下雷达的生存能力。
体积和重量体积和重量决定于雷达的任务要求、所用的器件和材料。
功耗及展开时间功耗指雷达的电源消耗总功率。
展开时间指雷达在机动中的架设和撤收时间。
第四章雷达终端显示器和录取设备

20km
仰 角
0km 200km
0km
斜距
E式
RHI
高度显示器的两种型式
Radar principles
情况显示器和综合显示器
安装在作战指挥室和空中导航管制中心的自主式显示装 置。它在数字式平面位置显示器上提供一幅空中态势的 综合图像。雷达图像为一次信息,综合图像为二次信息, 包括表格数据、特征符号和地图背景。
300°
目标 3
移动距标: 一个相对主波延迟时间可调节的脉冲。
Radar principles
A型显示器的原理框图
推挽式锯齿波
X 扫描 重复周期 回波 锯齿波 工作 期 刻度 X 扫 描 辉亮 停止期 匿 影 辉亮信号 距离刻度 移动距标 探测脉冲
辉亮
栅极
移动距标
阴极
灯丝加热阴极
回波信号
(a ) (b ) 1. X,Y偏转板控制电子束的偏转 2. 栅极、阳极控制产生电子束,电压高低决定显示亮度
表格 V= 4 BF-9 2009 河流 桥梁
AF -16-3 AF -61-5 …… …… MF= 9 -5
目标 CF-3-9 9005
CF-07 13-32 跑道
闪光点
AF -16-37
距标
Radar principles
光栅扫描雷达显示器
数字式的光栅扫描雷达显示器与雷达中心计算机和显示 处理专用计算机构成一体,具有高亮度、高分辨率、多 功能、多显示格式和实时显示等优点,既能显示目标回 波的一次信息,也能显示各种二次信息以及背景地图。
平面显示器提供了 360度范围内全部 平面信息,所以也 叫全景显示器或环 视显示器,简称 PPI显示器或P显
浅谈二次雷达应答机的S模式在终端区的运用

浅谈二次雷达应答机的S模式在终端区的运用摘要:随着现代雷达技术的不断发展,二次雷达应答机的S模式在航空交通管制中的运用逐渐得到普及。
本文重点针对S模式在终端区的应用进行论述,阐述了S模式的工作原理及其在终端区的优势和应用场景,同时对相关的技术挑战和未来的发展方向也进行了探讨。
关键词:二次雷达应答机、S模式、终端区、航空交通管制、优势、挑战、发展方向正文:一、引言随着航空运输业的发展,航空交通管制的作用越来越重要。
在现代航空交通管制中,雷达技术被广泛应用,并且二次雷达应答机的S模式越来越受到关注。
S模式在航空交通管制中的应用,可以更好地实现飞机的识别、跟踪和管理。
二、S模式的工作原理S模式是指二次雷达应答机通过正弦波信号对航空器的询问,询问内容与航空器相关信息(如飞行高度、速度、识别码等)相关。
航空器收到询问信号后,会通过内置的编码器进行编码,然后通过二次雷达应答机发回响应信号,二次雷达应答机接收到反馈信息后进行解码,获取航空器的信息。
S模式的工作原理可以更好地实现对飞行器的细致跟踪。
三、S模式在终端区的优势和应用场景终端区是指飞机接近机场附近,进行起降等操作的区域。
在这个区域内,飞机的密集度很高,而S模式可以实现对飞机的快速识别和管理。
S模式具有如下优势:1. 高精度识别能力:S模式通过对航空器的询问和获取反馈信息,实现对飞机的高精度识别。
2. 快速响应能力:S模式的响应速度非常快,对于需要紧急处理的情况,可以实现快速响应和处理。
3. 指导起降操作:在终端区,通过对飞机的识别和管理,可以更好地指导飞行员进行起降操作,并增加安全性。
四、S模式的技术挑战和未来发展方向S模式在终端区的应用也存在一些技术挑战,如:1. 局限性:S模式具有一定的调制方式和编码方式,因此不能实现所有情况下的航空器识别。
2. 抗干扰能力:S模式在电磁场复杂的终端区环境中,面临干扰和误判的问题。
针对以上问题,未来的发展方向可以从以下几个方面展开:1. 研究适应更多情况的调制方式和编码方式,实现对所有情况下航空器的有效识别。
第4章 雷达终端显示器和录取设备

第 4 章 雷达终端显示器和录取设备
4.2.2 A/R显示器
在A型显示器上, 我们可以控制移动距标去对准目标回波, 然后根据控制元件的参量(电压或轴角)而算得目标的距离数据。 由于人的固有惯性, 在测量中不可能做到使移动距标完全和目 标重合, 它们之间总会有一定的误差Δl, 这个误差我们称为重合 误差。
第 4 章 雷达终端显示器和录取设备
发射脉 冲
近区地 物回波
目标回 波
0 10 20 30 40 50 60 70 80 90100 机械距离刻度
图 4.8 A型显示器画面
第 4 章 雷达终端显示器和录取设备
X 扫描
刻度 辉亮 移动距标
回波
X扫 描
重复周期
工作 期 停止期
辉亮
匿 影
(a)
(b)
图 4.9 A (a) 示波管各极波形; (b)波形时间关系
(3) 扫掠直线性好。要求锯齿电压波在工作期内电压变化 的速率接近一常数, 若这时采用均匀的固定距离刻度来测读, 则 可以得到较高的测距精度。
此外, 还要求扫掠电压有足够的锯齿电压幅度, 扫掠电压的 起点要稳定, 扫掠锯齿波的恢复期(即回程)尽可能地短。
第 4 章 雷达终端显示器和录取设备
2) 移动距标的产生 用移动距标测量目标距离, 就要设法产 生一个对主波延迟可变的脉冲作为距标。调节距标的延迟时间 (并能精确读出), 使距标移动到回波的位置上, 就可根据距标迟 后主波的时间tR算出目标的距离R(R=1/2ctR, 这里c为光速)。
如图4.12和图4.13所示, 以晶振频率为75 kHz的晶体振荡器 作为基准信号源①, 经5×6次分频后得到频率为2.5 kHz的正弦 信号②。用②去形成A扫掠线的触发信号⑤, 其重复周期相应为 60 km范围, 扫掠电压如⑥所示。
浅谈雷达终端设备模块化
浅谈 雷达终 端设 备 模块化
O八 一 科技
()模块 的划 分 3
模块 的划 分 ,首先 应 考虑模 块 能完成 系统 赋 予该模 块 的功能 。其 次 ,应 考虑模 块 能广 泛 使用 于各 种产 品 ,满 足横 系列 模块 化 、纵系 列模 块化 的需要 ;再 次 ,还应 考虑组 织模 块 的生 产 、试 验 和贮存 的方便 性 。 因此 ,划分 和构 成 的模块 应具 备 以下条 件 :
① 功 能性 。即任 何模 块都 必须 具有 特定 功能 ,能完成 功能 分解 时 ,系统赋 予该模 块 的
特 定任 务 。
②独立性。即任何模块在具备特定功能的同时,还具备相对独立的结构 ,能单独地组
织 生 产 ,调 试运转 和贮 存 。 通用 性 还表 现在 结 构 的典 型性上 ,能和 其他 模 块及 部 件 有 良好 的接 口和联 结 。所 以 , 模 块是一 个标 准 的单元 。
SCANTER2001场监雷达终端监控系统软件安装及维护
SCANTER2001场监雷达终端监控系统软件安装及维护场面监视雷达是空中交通管理设施的一个重要组成部分,它具有较高的实时目标探测能力,能够可靠、精确地探测到机场场面上飞机和机动车辆的移动状况,有效减少了机场的拥挤,提高效率,在国际大型机场中场面监视雷达得到了广泛的应用,文章主要介绍了场面监视雷达系统的软件安装及维护。
标签:场面监视雷达;监控;软件;安装;维护引言SCANTER 2001场面监视雷达向管制人员提供跑道、机坪、滑行道、停机桥位等需要监视关心的区域中的飞机、车辆等物体的位置、大小、速度等信息。
对于跑道上的飞机等物体可以预判有无碰撞发生,并向管制员发出告警。
能够对系统中的飞机、车辆进行自动识别,自动挂上识别标牌。
可以提供全天候昼夜连续的场面情况监视。
在雨雪或冰雹的气候条件下也能提供用户满意的监视效果。
为了方便日常对终端监控系统维护,现将系统安装及维护方法做以介绍。
1 系统软件安装及维护1.1 场监软件参数修改1.1.1 修改AIRPORT地图AIRPORT地图编辑:(1)场监系统AIRPORT地图包括:Outer conture 机坪区Islands 草地、环岛APP lines 近进延长线ARP 一跑道中心点Buildings 建筑Centerlines 中心线RWY ID 跑道号SMR 场监雷达位置Stands 停机位Stand IDs 桥位号TWR 塔台位置TWY IDs 滑行道号(2)AIRPORT地图保存目录在dp08中:AIRPORT地图保存目录tradisdata/maps (3)AIRPORT地图编辑步骤以中心线Centerlines为例:a.在dp08上打开Centrlines地图编辑器点击EDITMAP——Centerlinesb.编辑Centrlines地图并保存退出c.查找修改好的地图文件在dp08上cd /hittsyscd tradisdata/maps/ls -ltr修改后的Centerlines地图为修改时间最新的cl.cgm d.将修改后Centerlines保存至系统changes目录cp cl.cgm /auto/changes/patches/tradisdata/maps/e.給需要使用此Centerlines地图的席位做configure ssh dp02su -HITTdefaultcd /hittsysconfigure1.1.2 修改SMR地图SMR地图编辑(1)常用的SMR地图:Grass map non-movement areaMask map movement areaTrack map plot areaMosaic map 雷达头马赛克地图(2)SMR地图保存目录在dp08中:Grass、Mask、Track地图保存目录maskdata Mosaic地图保存目录mosdata(3)SMR地图编辑步骤以Mask map为例:a.在dp08上打开Mask地图编辑器点击EDITMA——MASK01b.编辑Mask地图并保存退出c.查找修改好的地图文件在dp08上cd /hittsyscd maskdatals -ltr修改后的Mask地图为修改时间最新的mask01.cgmd.将修改后Mask地图保存至系统changes目录cp mask01.cgm /auto/changes/patches/maskdata/e.给rdp01、rdp02及各席位做configure1.1.3 场监席位配色方案修改(1)场监席位配色方案保存目录在dp08中:配色方案保存目录tradisdata/xml(2)场监席位配色方案修改步骤a.打开颜色编辑器DISPLAY OPTIONS——COLORb.选择需要修改的配色方案:DAY、NIGHT、PALETTE 1、PALET TE 2c.选择需要修改颜色的选项常用的包括:LabelListMapTrackVideoWindowd.修改颜色e.点击OK退出颜色编辑器f.查找修改好的配色方案cd tradisdata/xml/ls-ltr对应的配色方案修改文件为:DAY——pal_defcolor.xmlNIGHT——pal_defcolorM1.xmlPALETTE 1——pal_defcolorM2.xmlPALETTE 2——pal_defcolorM3.xmlg.将修改后的配色方案保存至系统changes目录cp pal_defcolorM1.xml /auto/changes/patches/tradisdata/xml/h.给需要使用该配色方案的席位做configure1.2 场监数据存档与恢复1.2.1 数据存档记录利用存储空间记录,直到在储存媒介上只剩下了预定义的最小存储空间或达到了预定义的最大记录时间为止。
雷达原理电子教案 (4)

第 4 章 雷达终端显示器和录取设备
主波 回波 距离
主波 回波
回波 主波
(a)
(b)
(c)
图 4.1 (a)A型显示器; (b) J型显示器; (c) A/R显示器
2) 显示的坐标数量、种类和量程 这些参数主要根据雷达的 用途和战术指标来确定。
第 4 章 雷达终端显示器和录取设备
3) 对目标坐标的分辨力 这是指显示器画面上两个相邻目标 的分辨能力。光点的直径和形状将直接影响对目标的分辨力, 性 能良好的示波管的光点直径一般为0.3 ~0.5 mm。此外, 分辨力还 与目标距离远近天线波束的半功率宽度和雷达发射脉冲宽度等 参数有关。
第 4 章 雷达终端显示器和录取设备
仰角
高度
距离
距离
图 4.5 高度显示器的两种型式
第 4 章 雷达终端显示器和录取设备
4.
随着防空系统和航空管制系统要求的提高及数字技术在雷 达中的广泛应用, 出现了由计算机和微处理机控制的情况显示器 和综合显示器。情况显示器和综合显示器是安装在作战指挥室 和空中导航管制中心的自主式显示装置, 它在数字式平面位置显 示器上提供一幅空中态势的综合图像, 并可在综合图像之上叠加 雷达图像。图4.6示出综合显示器的画面, 其中雷达图像为一次 信息, 综合图像为二次显示信息, 包括表格数据、 特征符号和地 图背景, 例如河流、 跑道、 桥梁及建筑物等。
第 4 章 雷达终端显示器和录取设备
2.
平面显示器显示雷达目标的斜距和方位两个坐标, 是二维 显示器。 它用平面上的亮点位置来表示目标的坐标, 属亮度调 制显示器。
雷达原理4-显示器

混合
回波信号 视放
方位 刻度
天线方位
图 4.15 动圈式平面显示器方框
随动 系统
天线方位
第 4 章 雷达终端显示器和录取设备 1. u(t)Ld(ti)R(t)iL K R(t)i dt
i(t)
i(t)=Kt
Im
u(t)C0
L u(t)=LK+Ri(t)
RIm R
LK
(a)
(b)
图 4.16 (a) 线圈等效电路; (b) 电流、电压波形
第 4 章 雷达终端显示器和录取设备
4.4 计算机图形显示
4.4.1 计算机图形显示系统
计算机
信号控制、处 理、存储电路
显示读 出装置
计算机 通信装 置
操作员
第 4 章 雷达终端显示器和录取设备
4.5 雷达数据的录取
4.5.1 雷达系统对雷达信息处理的过程主要有以下三点: (1) 从雷达接收机的输出中检测目标回波, 判定目标的存在; (2) 测量并录取目标的坐标; (3) 录取目标的其它参数, 如机型、架数、国籍、发现时间
第 4 章 雷达终端显示器和录取设备
雷达原理4-显示器
第 4 章 雷达终端显示器和录取设备
第 4 章 雷达终端显示器和录取设备
第 4 章 雷达终端显示器和录取设备
第 4 章 雷达终端显示器和录取设备
4.1 雷达终端显示器
任务: 显示雷达所获取的目标信息
4.1.1 显示器的主要类型 雷达终端显示器根据完成的任务可分为: 距离显示器、 平
目标回 波
0 10 20 30 40 50 60 70 80 90100 机械距离刻度
图 4.8 A型显示器画面
第 4 章 雷达终端显示器和录取设备
雷达原理_第四章-雷达终端

主波
回波
A/R型显示器
4.1 雷达终端显示器的类型及质量指标
(2)
平面显示器显示雷达目标的斜距和方位两个坐标, 是二维显示器。 它用平 面上的亮点位置来表示目标的坐标, 光点的亮度表示目标回波的强度。
平面显示器是使用最广泛的雷达显示器, 因为它能够提供平面范围的目标 分布情况, 这种分布情况与通用的平面地图是一致的。
平面显示器 (PPI显示器)
4.1 雷达终端显示器的类型及质量指标
偏心PPI型显示器是P显移动原点,使其偏离荧光屏几何中心,以 便在给定方向上得到最大扫描扩展。
距离
方位
偏心PPI显示器
4.1 雷达终端显示器的类型及质量指标
B型显示器, 它以横坐标表示方位, 纵坐标表示距离。通常方位角不是 取整个360°, 而是取其中的某一段, 即雷达所监视的一个较小的范围。如 果距离也不取全程, 而是某一段, 这时的B式就叫做微B显示器。在观察某一 波门范围以内的情况时可以用微B显。
200k m
0
0km
90
B式显示器
CUIT
雷 达 平 面 显 示 图 示 例
雷达图说明:中心点为厦门(气象台),每距离圈60公里,可覆盖300公里范围。 PPI-平面强度图:可以想象为从空中俯视地面时所看到的云的分布情况。 仰角:雷达天线扫描线与地面的夹角。 DBZ:雷达回波的强度值,数值越大,强度越强,反映在现象上雨越大。 距离:指总距离圈为300公里。 时间和日期:指观测的时间,每天固定时次观测(08、11、14、17、20、23时), 有回波时资 料更新。
4.1 雷达终端显示器的类型及质量指标
J型显示器是圆周扫描, 它与A型显示器相似, 所不同的是把扫描线从直线 变为圆周。目标的斜距取决于主波与回波之间在顺时针方向扫描线的弧长。
219388440_基于二次雷达的机场雷达探测终端的设计与应用

第8期2023年4月无线互联科技WirelessInternetTechnologyNo 8April,2023作者简介:廖毅轩(1991 ),男,广东梅县人,工程师,硕士;研究方向:智慧空管㊂基于二次雷达的机场雷达探测终端的设计与应用廖毅轩(民航中南空管设备工程(广州)有限公司,广东广州510410)摘要:随着航空技术的发展,机场雷达终端系统得到了广泛的应用㊂其设计过程以二次雷达原理为基础,引导和控制飞机㊂文章对二次雷达探测终端的工作原理和系统组成进行说明,从系统设备组成以及系统设计要求两个方面对二次雷达系统的设计方式进行概述㊂文章通过实验的方式对提出的机场雷达探测终端进行检验,结果发现设计的机场雷达探测终端在探测范围和探测距离精度两个方面均符合探测标准,以期通过对机场雷达探测终端的研究提升机场运转的稳定性㊂关键词:二次雷达;航空技术;终端系统中图分类号:TN958 96㊀㊀文献标志码:A0㊀引言㊀㊀随着我国航空事业的发展,通用机场的数量持续增加㊂相关数据显示,截至2022年6月,通用机场数量达384个,受飞机起飞架次数量扩大的影响,飞行管理难度明显提升[1]㊂在飞行过程中,交织码元幅度信息的变化不是规则的,这使得在飞机的应答信号交织时,传统的二次雷达识别和提取精确度有所降低,如提取错误的代码㊁高度测角精度不够等方面㊂加强飞行管理是航空事业发展的重要一环,这就要求机场的终端系统具有较强的处理能力和抗干扰能力[2]㊂余苗[3]针对二次雷达设计出一种补偿系统,通过实验验证后发现该系统具有降低时间及人力成本和提高精准程度等优点㊂本文提出了机场雷达终端的设备组成及设计要求,以期能够为我国未来机场雷达系统的开发提供参考,为终端系统的实际应用提供借鉴㊂1㊀二次雷达探测终端原理1 1㊀工作原理㊀㊀二次雷达在开机状态下,可以初始化信号处理机和信号交换机等设备,其工作方式为电源模块发送电压到其他模块中㊂在初始化过程中,由于接收命令和控制数据的不同,系统对命令和控制的响应方式也不同㊂主程序不受这一规则限制,不会受到任何命令或数据的影响[4]㊂二次雷达通常由操作员通过雷达监视或本地监视的方式,将获取的查询模式与方向等数据传输到信号处理机,就可以达到定位目标位置的目的㊂其内部的工作模式略显复杂,将信息通过数据融合单元进行处理,并把查询处理后的信息传输给其他单元㊂能够接收这种信息的单元有两个,分别为编码单元和解码单元㊂其会根据请求方式的不同,用修改或混合的方式来处理发射机的频率码与编码符号等,通过开关发送无线电信号㊂二次雷达依靠主雷达显示的点航迹数据来判断目标位置,点航迹数据的获取则通过3条信道和接收机获得㊂信道主要为Ω天线通道㊁ð天线信道以及Δ天线信道㊂接收机的主要作用就是将产生的基带IQ信号发送至信号处理机,此设备处理方式包括幅度压缩㊁点迹凝集等㊂1 2㊀目标检测原理㊀㊀二次雷达作为雷达终端设计的重要部分,系统进行目标检测期间与飞机的反射面积不存在相关性,即一次雷达与二次雷达在对目标进行检测中的方式存在差异㊂与一次雷达相比,二次雷达在信息传输过程中产生的数据量更低㊂系统在进行目标检测的过程中,不是检测飞机的反射能量,而是由其接收飞机发射信号后产生的信号回波㊂因此,雷达终端系统的检测与飞机的反射面积无关,回波强度不会发生改变㊂除此以外,雷达终端系统在接收和发送信号期间的频率存在差异㊂当地面或气象目标发射信号时,由于其信号接收为1030MHz接收机,无法对1090MHz接收机接收系统终端信号造成干扰㊂其信号类型不仅包括目标的距离,还涵盖了目标的代码㊁高度等信息内容㊂本研究通过对雷达终端系统目标检测原理的说明,阐述了系统组成及系统设计的要求,以此为基础,为后续进行雷达终端系统实验奠定基础㊂1 3㊀系统组成㊀㊀雷达终端系统由3种系统组成,如图1所示㊂其中,主机分系统包括两个部分:处理和转化分机㊂天馈分系统又被称为二次雷达天线,其组成部分可以分为3种,第一种为左半部分,由相应的辐射单元构成,其中包含35个前向辐射振子和1个反向辐射振子,所有辐射振子构成方式相同,由11个耦集子构成㊂此系统第二部分和第三部分同样由辐射单元构成[5]㊂图1㊀雷达终端系统组成主机分系统根据各分机负责的内容不同,将内部分机分为两种㊂第一种为处理分机,它主要负责各个模块的构成,例如信号处理模块的构成㊁电源模块的构成等㊂第二种为转换分机,它主要作用为可筛选多㊀㊀㊀种射频信号,选择信号传输和接收的最佳路径[6]㊂监控分系统通过网线与主机系统连接㊂该系统主要由两部分组成,分别为维护软件和计算机㊂其中,维护软件主要依靠计算机来运行,在传输监控数据方面有着重要的作用㊂2㊀二次雷达系统设计2 1㊀系统设备组成㊀㊀雷达终端系统由3个部分组成㊂第一种为天馈系统,主要负责通过天线传输电磁波来实现辐射询问信号和接收应答信号的功能㊂第二种为主机系统,是雷达系统中最重要的组成部分,整个系统中主要的工作都由其内部的处理分机和转换分机完成㊂第三种为监控系统,主要负责控制二次雷达接收机的工作以及通过监控维终端完成对接收机的监控工作㊂二次雷达系统设计的设备组成功能及数量如表1所示㊂表1㊀二次雷达系统组成名称功能个数/个天馈系统通过电磁波获取信号-主机系统处理分机主要实现SSR询问的编码㊁调制㊁数据上报等功能1询问电源实时监测电源输出频率2发射机在不同模式的询问信号的调制㊁放大3接收机接收应答信号,传输基带IQ信号4信号处理模块自检㊁信道管理㊁编译码㊁航迹处理等功能2监控系统实时监控雷达运作状态-㊀㊀以处理分机为例,其由询问电源㊁发射机㊁信号处理等模块构成,处理分机的组成如图2所示㊂图2㊀处理分机组成2 2㊀系统设计要求㊀㊀机场雷达的终端系统对性能的要求很高,具体数据的精准程度指标如表2所示㊂环境条件要求如下:(1)温度要求㊂室内温度最低温度要求为0ħ㊁最高温度要求为45ħ,室外温度最低温度要求为-50ħ㊁最高温度要求为70ħ;(2)湿度要求㊂在室内工作时,如果温度为30ħ,工作环境的最低湿度为30%,最高湿度应ɤ98%;(3)供电要求㊂雷达系统主机工作电流为220V,最佳工作电压为50Hz,电压为交变电压,主机系统的耗电量不大于3kVA,系统功耗要求低于10kVA㊂表2㊀设备组成设计指标数值设计指标数值范围及距离<45m方位ɤ0 1ʎ视频分辨率<80%分辨率脉冲体制单个脉冲体制高度覆盖>18000m仰角范围0ʎ 40ʎ接收信号频率1090MHz天线转速正常工作状态下为6转/min最大目标处理率400批/帧检测概率>99%数据速率最低4s/帧,最高12s/帧系统端口UDP网络本次测试的雷达系统通过对工作设备进行了冗余设计,使得到的测试结果具有时效性强㊁准确度高等优点㊂冗余设计根据设计方法的不同,分为双重热备份和模块冗余备份两个部分㊂虽然双重热备份相比模块冗余备份,系统有更高的稳定性和独立性,但是基于可靠性和成本㊁功耗等方面考虑,本研究选择了更适合项目测试㊂3㊀应用效果分析㊀㊀为证明本次设计的系统性能指标可以满足雷达终端系统的设计要求,可以作为该系统的数据基础㊂在进行实验前,本研究仔细检测了主机分系统等所有参加测试的系统是否能够正常工作并将雷达系统整体调试到最佳状态㊂准备工作完成后,本次实验将在某实验地点进行㊂3 1㊀实验方法3 1 1㊀雷达终端系统探测范围检验方法㊀㊀测试雷达终端系统的范围应用以下方法:(1)在雷达终端系统保持开机状态下,连续24h对目标进行探测;(2)通过雷达探测得到的结果,记录被探测目标可以达到的最远距离,记录方法可以为人工记录或分析终端分系统所提供的数据等㊂合格判据:从实验结果中挑取探测高度超过10km的数据,若雷达的探测距离超过380km,则符合探测范围测试设计要求㊂3 1 2㊀雷达终端系统探测精度检验方法㊀㊀测试雷达终端系统的探测精度应用以下方法:(1)在雷达终端系统保持开机的状态下,连续24h探测空中民航飞机;(2)在终端系统工作时同时记录分系统的工作数据;(3)利用ADS-B地面站自动获取其监测范围内飞机的位置信息;(4)将测量的数据结果和系统测量结果进行对比,分析后计算距离精确度和方位精确度的平均方根值,以此来判断系统的精确度㊂合格判据:系统测试以距离和方位两个指标为判断依据,方位精度和距离精度设计要求分别为<0 1ʎ和<45m㊂3 2㊀结果统计㊀㊀此基于二次雷达的机场雷达探测终端实验,通过对探测范围以及探测距离精度进行检验,实验数据结果如表3所示㊂表3㊀实验数据统计结果序号实验项目数值数据备注1探测范围检验ȡ380km459 2km合格2探测距离精度检验<45m19 8m合格通过表3中的数据统计结果可见,提出的系统探测范围和探测距离精度检验的数据分别为459 2km㊁19 8m,证实本次实现设计的指标符合雷达终端系统的设计标准㊂4 结语㊀㊀本文通过对雷达终端系统的研究,获取关键性的技术手段㊂本文通过雷达探测终端系统对飞机监测数据与ADS-B地面站数据进行对比分析的结果,提出的机场雷达终端系统在探测范围和探测距离精度方面均满足设计要求,在航空飞行管理的整体改进和机场雷达终端系统的实际应用方面有着重要的理论价值㊂参考文献[1]李红兵.二次雷达显控终端的设计与实现[J].舰船电子对抗,2019(1):112-116.[2]刘嵩义.二次雷达系统干扰等问题的解决方法[J].电子测试,2019(23):124-126.[3]余苗.高精度窄波束二次雷达指向精度补偿[J].现代导航,2020(2):136-139,145.[4]陈伟,巫文俊,邹亮.ADS-BIN在二次雷达系统中的应用[J].电子技术与软件工程,2022(11):160-163.[5]水泉,黄涛.基于通用服务器平台的S模式二次雷达系统研制[J].电子技术与软件工程,2020(7):91-95.[6]杨思.二次雷达仿真和实测数据质量评估[D].天津:中国民航大学,2020.(编辑㊀王永超)DesignandapplicationofairportradardetectionterminalbasedonsecondaryradarLiaoYixuanCivilAviationGuangzhouATMSystemsEngineeringCo. Ltd. Guangzhou510410 ChinaAbstract Withthedevelopmentofaviationtechnology theairportradarterminalsystemhasbeenwidelyused.Itsdesignprocessisbasedontheprincipleofsecondaryradartorealizethepurposeofaircraftguidanceandcontrol.Theworkingprincipleandsystemcompositionofthesecondaryradardetectionterminalareexplained andthedesignmodeofthesecondaryradarsystemissummarizedfromtwoaspectsofthesystemequipmentcompositionandthesystemdesignrequirements.Theproposedairportradardetectionterminalistestedbyexperiment andtheresultsarefoundthatthedesignedairportradardetectionterminalmeetsthedetectionrangeanddetectiondistanceaccuracy inordertoimprovethestabilityoftheairportoperationthroughtheresearchoftheairportradardetectionterminal.Keywords secondaryradar aeronauticaltechnology terminalsystem。
新一代风廓线雷达产品终端使用简介
科技视界Science&Technology VisionScience&Technology Vision科技视界0引言风廓线雷达是新一代遥测风的探测仪器,可以连续测得雷达上空几分钟、几十米间距高时空分辨率的风资料,弥补常规高空风探测中时空密度稀疏的缺点,为天气预报、预警提供探测资料。
蓬莱风廓线雷达是CLC-11-D型固定式边界层风廓线雷达,由南京恩瑞特实业有限公司制造的新一代风廓线雷达,目前,山东省已经布设三部同类型雷达,随着未来雷达布网的趋势,雷达软件越来越受到关注,本文主要介绍产品终端程序的使用方法,也就是使用者最关心的程序,虽然产品自带软件说明书,但比较繁琐,本文言简意赅的介绍了软件的使用方法,以方便使用者尽快上手使用软件,提高工作效率。
1运行程序前的设置双击运行产品终端可执行文件,点击菜单栏中“选项”选项,在弹出的列表中点击“路径设置”,弹出图1界面,对前四项各项进行路径设置,设置完毕后,如图1所示,在E盘下将自动建立Data文件夹,在其下建立FFT、Origin、Product、Txt文件夹,分别用来存放雷达实时原始数据、雷达历史原始数据、雷达产品文件、雷达文本数据。
最后三项是用于雷达台站FTP上传使用,在这里不做详细介绍。
点击“确定”按钮,至此运行程序前的准备工作完成。
图12数据产品图调用介绍双击运行产品终端可执行文件,点击菜单栏中“文件”选项,在下拉菜单中点击第一项“实时更新”,等待雷达运行三个周期(约18分钟)后可显示数据产品图,注意:如果没有点击“实时更新”,数据将不进行自动更新。
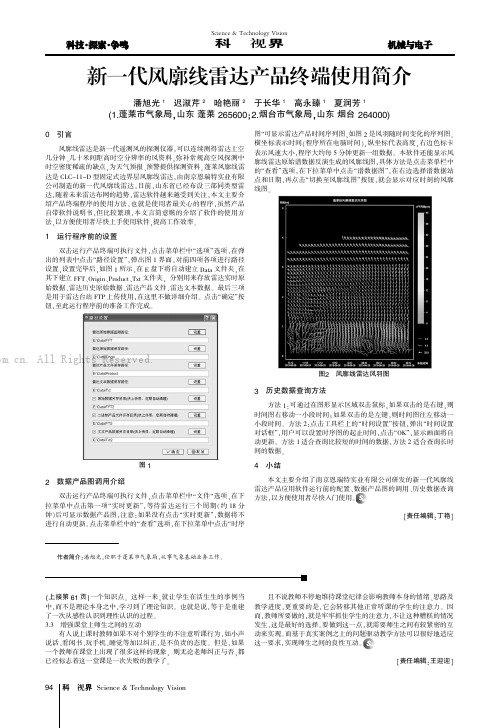
点击菜单栏中的“查看”选项,在下拉菜单中点击“时序图”可显示雷达产品时间序列图,如图2是风羽随时间变化的序列图。
横坐标表示时间(程序所在电脑时间),纵坐标代表高度,右边色标卡表示风速大小,程序大约每5分钟更新一组数据。
本软件还能显示风廓线雷达原始谱数据反演生成的风廓线图,具体方法是点击菜单栏中的“查看”选项,在下拉菜单中点击“谱数据图”,在右边选择谱数据站点和日期,再点击“切换至风廓线图”按钮,就会显示对应时刻的风廓线图。
船用雷达终端显示系统

第10章船用雷达终端显示器10.1 概述雷达接收机将天线受到的微弱目标经高频放大、混频、中频放大、检波极信号处理后,尚需提取回波中的目标信息,再在经必要的加工后直观显示于显示器上,此过程由雷达终端来实现。
现代雷达终端显示的基本内容含:目标数据的录取、数据处理及目标航行状态的显示的典型组成框图如图10-1所示。
图10-1 船用雷达终端的典型组成简框图0-1中,“目标录取”用于实现对来自雷达录取机的雷达目标回波存在的确认,并提取目标的方位、距离、航速等信息:“数据处理”完成目标数据的关联、航迹处理、数据滤波跟踪;方位角编码完成天线瞬间方位角数据的提取机其极坐标转换成直角平面坐标,“显示系统”完成目标的位置、运动状态及其它信息的显示。
10.2 船用雷达显示器件船用雷达终端显示器采用的显示器件有两大类;磁偏转阴极射线管﹙CRT﹚和液晶显示器﹙LCD﹚,终端显示器有多种扫描方式工作:对传统船用雷达CRT显示器,常采用径向园扫描方式;对现代船用雷达LCD显示器,常采用光栅扫描显示方式。
按照需要显示的信息类型,可分为“一次信息”和“二次信息”显示。
10.2.1 阴极射线管CRT(Cathode Ray Tube)船用雷达要求使用具有余辉、亮度大、聚焦好、屏面尺寸大及磁偏转的CRT,以适应在宽阔海域中能得到较好的图像分辨力、清晰度及亮度画面的观测要求。
雷达显示器常用的CRT有三类:静电式:电子束聚焦,由管内极板间静电场完成电子束偏转,简言静电聚焦、静电偏转CRT,常用于军用A型显示器,也常见于实验室的普通示波管;磁式:电子束的聚焦与偏转均由装在管颈外的线圈流入电流产生的磁场完成,传统船用雷达常用;混合式:静电聚焦、磁偏转,因其具有供电方便、消耗功率小、结构简单、偏转灵敏度高等诸如优点。
船用雷达常被广泛采用的是混合式CRT。
1.CRT构成原理1)单色混合式CRT其构成如图10-2所示。
图10—2 单色混合式CRT结构图10-3 彩色CRT的结构示意图由图可见,混合式CRT由玻璃外壳、电子枪、荧光屏三大部分构成,工作时外加偏转线圈,形成偏转系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
雷达图像的展开实际上就是图像放大,其目的是为了观察图像的细节,提高分辨率,从而提高目标的坐标录取精度。有两种情况:实现起来比较简单;一种是对远区目标图像的展开,称为偏心展开偏心展开的实现可以通过将扫描起点偏离到屏幕中心以外的某一确定点来实现,也可以根据所观察的目标图像维中心将画面展开,后者更符合人们的观察习惯且容易实现。(远区和近区的标准是什么?)
对近区目标,简单提高扫描产生器的时钟频率、提高扫描速度就可以实现器放大效果。
现代雷达显示系统图形显示和数字计算机以有机的融为一体,能够实现雷达回波图像复杂运算和处理,并且能够提供显示图像信息的记录存储及打印输出。
数字式显示系统主要有两种形式,及计算机图形显示系统和智能图形显示系统。差别在于智能图形显示系统包含了一个显示(图形)处理单元,改图形处理器是针对图像处理而优化设计的,除了完成常规的运算外,还就有更强大的图形处理功能,能够实现显示图像的叠加、放大、缩小、移动、旋转、开窗、渲染等复杂操作。