激光干涉测量系统
激光干涉测量技术

数字处理
A O
C
B
O’
D
激光干涉仪应用及跟踪干涉测量技术
3)位置跟踪控制系统
误差分析:
激光干涉测量过程中,由于跟踪转镜的转角不参与对测量值的计算,所以只要在 运动过程中能保证干涉仪能进行干涉测量,不丢光,就能完成测量任务。电气系统 的稳态误差不会对测量精度产生影响。
A O
C
B
O’
D
光电池位置偏差对干涉仪测量精度的影响:光电池位置偏差对激光跟踪干涉仪测距精度影响不大,
新建立4个约束方程,可见存在一个冗余方程。
A B
D 3)只要增加动点数,使得冗余的约束方程个数大于或等于系统
未知参数,就可对系统进行标定。
C
激光干涉仪应用及跟踪干涉测量技术
解决自标定问题 四路激光跟踪干涉测量系统——引入n个动点
1)两点间距离公式,可建立4n个约束方程。 2)同时引入了3n个未知量(每个动点的x、y、z坐标)。 3)系统原有的未知量 共3×(4+1)=15个
激光干涉仪应用及跟踪干涉测量技术
三路激光跟踪干涉测量系统
每一路激光跟踪干涉仪实时跟踪目标镜运动,并测量出目标镜到 跟踪转镜中心的相对长度变动量。
•如果动点到基点的初始长度已知,
P
那么动点移动后,其到基点的距离也就可以确定。
A B
•如果三个基点的相对位置关系也已知, 那么空间种运动目标的位置也就唯一确定。
基点1
基点2
基点3
基点4
基点5
L1 (x0 xb1)2 ( y0 yb1)2 (z0 zb1)2
初 始
L2 (x0 xb2 )2 ( y0 yb2 )2 (z0 zb2 )2
激光干涉测长的基本原理
激光干涉测长的基本原理
激光干涉测长是一种非接触式测量方法,其基本原理如下:
1. 使用激光器产生一束单色、相干、窄束的激光。
2. 将激光分为两束,分别称为参考光和测量光。
参考光经过一个反射镜反射,与测量光相向而行。
3. 测量光照射到被测对象上,经过反射后再次与参考光相遇。
4. 参考光和测量光在相遇的地方形成干涉条纹。
这是因为两束光波相干叠加时,会出现干涉现象。
5. 干涉条纹的形态和幅度受到测量光程的影响。
测量光程是测量光从激光器出射到被测对象反射回来的总路程,包括参考光程和被测对象的光程。
6. 通过观察干涉条纹的形态和移动的情况,可以确定测量光程变化的大小,从而计算出被测对象的长度或距离。
激光干涉测长具有高精度、高分辨率、快速响应等特点,广泛应用于工业制造、科学研究、精密测量等领域。
激光原理与技术--第六章 激光在精密测量中的应用
半波长的奇数倍时----- 出现明纹。
21
我们把k =士1的两个暗点之 间的角距离作为中央明纹的 角宽度.中央明纹的半角宽度
Δθ0≈λ∕a
◆暗纹中心位置公式:
◆明纹中心位置公式:
明纹 暗纹
◆光强分布公式:
单缝衍射测量仪器示意图
4
6.1.2 激光干涉测长系统的组成
除了迈克尔孙干涉仪以外,激光干涉测长系统还包括激光光源、可移 动平台、光电显微镜、光电计数器、显示记录装置
7.干涉条纹计数时,通过移相获得两路相差π/2的干涉条纹的光强信号, 该信号经放大,整形,倒向及微分等处理,可以获得四个相位依次相差π/2 的脉冲信号(图6-5)。
图6-2 反射器
3
6.1.2 激光干涉测长系统的组成
5.激光干涉仪的典型光路布局有使用角锥棱镜反射器的光路布局,如图6-3示。
图6-3 典型光路布局
6. 移相器也是干涉仪测量系统的重要组成部分。常用的移相方法有机械移相(图6-4), 翼形板移相,金属膜移相和偏振法移相。
图6-4 机械法移相原理图
13
基本原理
The Michelson interferometer is shown in Figure 1. The basic optical path of laser interferometer length measurement is a Michelson interferometer, and this makes use of interference fringes ,which are the traces of points owing the same path difference, to reflect the information of measured object. It uses the partially reflecting element P to divide the light from laser source into two mutually coherent beams which are reflected by M1 and M2 .The output intensity of an interferometer is a periodic function of the length difference between the measuring path and the reference path of the interferometer. Typical length measurements with a laser interferometer are performed by moving one reflector of the interferometer along a guideway and counting the periodic interferometer signal, e.g. the interference fringes. These results are unambiguous as long as the length difference between two consecutive measurements is within λ/2. Interpolation of the fringes can lead to a resolution of the length measurement below 1nm. The bright fringes occur when the path difference is kλ and the dark fringes when it is (k+1/2)λ,where k is any integer.
激光干涉测量技术的应用与发展
激光干涉测量技术的应用与发展激光干涉测量技术是一种利用两束或多束激光干涉的方法来获得被测量物件的形状、尺寸、形变、表面粗糙度等参数的非接触式测量技术。
因其具有精度高、速度快、非接触、非损伤等优点,近年来被广泛应用于各个领域,如空间结构、微加工、医学、汽车制造、半导体加工、航空航天等。
本文将重点探讨激光干涉测量技术的应用和发展。
一、应用领域1.空间结构测量激光干涉测量技术可以通过在空间结构表面扫描多个测量点来获取结构的形状和姿态等信息,用于结构的定位、配合和校正。
例如,在卫星发射前,需要准确测量各个部件的尺寸和相对位置,确保卫星能够正确地组装在一起。
2.微加工测量在微加工过程中,激光干涉测量技术可以测量微米级别的形变和表面质量,用于控制产品质量和优化加工过程。
例如,在制造微纳米光学器件时,需要测量器件的形变和表面质量,以确保其性能优异。
3.医学应用激光干涉测量技术可以应用于医学领域,用于测量人体器官和组织的形状和尺寸等参数。
例如,在牙齿修复中,激光干涉测量可以帮助医生准确测量牙齿的大小和形状,制作出合适的假牙。
4.汽车制造在汽车制造领域,激光干涉测量技术可以用于检测车身结构的尺寸和形状是否符合设计要求,以及车身表面的平整度和几何精度。
例如,在汽车制造中,需要使用激光干涉测量技术来检测车门、车窗的尺寸和形状是否正确,以确保车门、车窗能够完全密合。
5.半导体加工在半导体制造过程中,激光干涉测量技术可以用于测量芯片表面的平整度和精度,以及芯片上电路元器件的尺寸和形状等参数。
例如,在制造集成电路时,需要使用激光干涉测量技术来确保芯片表面的平整度和精度符合要求,以确保芯片的电子性能。
二、技术发展近年来,随着激光技术和计算机技术的发展,激光干涉测量技术也取得了一系列的进展。
1.高频率测量高频率测量是近年来激光干涉测量技术的一个新发展方向。
高频率测量可以在非常短的时间内获得目标结构的形状和位移信息,适用于快速运动或频繁变化的物体测量。
雷尼绍激光干涉仪系统手册-线性测量

激光系统手册线性测量页码,1/32线性测量标题页线性测量步骤线性测量是最普通的激光测量形式。
激光系统通过将轴读数器上显示的位置与激光系统测量的真实位置相比较,测量线性定位精度和重复性。
本节内容将指导您进行机器线性轴定位精度校准的实践练习。
线性测量所需的步骤如下:规格参数 — 给出线性测量精度的全部规格参数。
线性测量设定测量线性位置的典型系统设定如图1所示。
选择设定图上的文字标签,获取有关该系统组件的更多信息。
重要事项 — 请先阅读安全一节,再继续。
调整激光光束,使之与机器运动轴准直。
测量和记录机器的线性误差。
图1—测量位置的典型系统设定执行以下步骤,设定激光系统进行线性测量。
如果您尚未完成以上操作,则安装校准软件。
在三角架上安装XL激光头。
用USB电缆将XL激光头连接到PC机上。
将电缆的一端插到XL激光头尾部的USB插槽中,另一端插到PC 机上。
对XC补偿单元执行相似的操作。
将XC补偿单元的空气传感器放在机器上或其周围的适当位置上。
为安全起见,开始时XL激光头的光闸应转至关闭位置,如下图2所示。
图2 - XL光闸位置- 不发出任何光束连接激光系统的直流电源,然后连接到主电源并开启电源。
激光系统将开始预热循环,这大概需要6分钟。
线性测量的原理图1 - 线性测量的光学设定要对线性测量进行设定,使用随附的两个外加螺丝将其中的一个线性反射镜安装在分光镜上。
这个组合装置称为“线性干涉镜”,它形成激光光束的参考光路。
线性干涉镜放置在XL 激光头和线性反射镜之间的光路上,如图1所示。
分光镜机架上标有两个箭头,指示其方向。
箭头应指向两个反射镜,如上图所示。
图2 — 测量原理警告1.为避免伤害眼睛,请不要直视射出光束。
2.不要让光束直射或者通过光学元件或任何其他反射面反射到您的眼睛或任何其他人的眼睛。
+89束与机器的运动轴准直。
页码,4/32线性测量标题页来自XL激光头的光束进入线性干涉镜,在此光束被分成两束。
激光测量技术-第二章 激光干涉测量技术
本章主要内容: 1. 背景知识概述(重点) 2. 第一节 干涉测量长度和位移(重点) 3. 第二节 小角度测量仪(合并第一节) 4. 第三节 外差干涉测量技术(重点) 5. 第四节 激光全息干涉测量技术 6. 第五节 激光散斑干涉测量技术 7. 第六节 激光光纤干涉测量技术 8. 第七节 激光多波长干涉测长技木
测控教研室
2006年3月6日星期一
3
一、背景知识概述
I max I min 4AB 2AB 2 光的相位与走过的光程nl有关: M 2 2 I max I min 2A 2B A B2
A cos(t ) A cos(t 0
2
nl )
已知发生相干条件, 带入2-1-2式:
测控教研室
2006年3月6日星期一
24
§2.1 二、系统的组成
3) 光学倍频 L= Kλ/2k
测控教研室
2006年3月6日星期一
25
§2.1 二、系统的组成
4) 零光程差
Lr 与Lm相等且同向安置, 消除环境的影响,提高精度
测控教研室
2006年3月6日星期一
26
§2.1 二、系统的组成
(二)、干涉条纹计数与测量结果 干涉条纹计数的要求: a) 能够判断方向, 避免反向、大气、环境 振动以及导轨的误差影响 b) 能够细分, 提高分辨率 这样需要相位相差90度的两个电信号输出, 即一个按光程正弦变化,一个余弦变化
测控教研室
2006年3月6日星期一
2
一、背景知识概述
则合成有:
A1 cos(t 1 ) cos(t 2 ) cos(t 1 ) cos(t 1 (1 2 ))
激光干涉仪原理介绍——线性测量与回转轴校准(图文并茂)

现代集成制造与数控装备研究所 CIMS
机械与汽车工程学院
回转轴校准测量步骤
典型测试(步距为5°)的步骤如下: 1. 将XR20-W定位在被测轴上并调整激光系 统的准直(如右图所示)。 2. 在轴的起始位置将激光装置置零,在计算 机上开始采集数据并运行数控程序。 3. 轴到达起始目标位置,记录激光读数。 4. 被测轴以5°步距移至第二个目标,XR20-W 内置的反射镜反向旋转5°。 5. 系统结合XL-80与XR20-W的读数,记录被 测轴在5°的位置误差。 6. 通过使回转轴依次到达一系列测量点, 可测量并绘出轴的总体精度图。
机械与汽车工程学院
激光的产生
LASER是Light Amplification by Stimulated Emission of Radiation 的缩写,意为通过受激发射线的放射达到光的放大,即激光。 大多数现代位移干涉仪都使用氦氖 (He-Ne) 激光管,这些激光管具 有633纳米 (nm) 的波长输出 氦氖激光管的构成如下所示:
现代集成制造与数控装备研究所 CIMS
机械与汽车工程学院
激光及其特点 激光输出可视为一束正弦波。
波长
激光具有三个重要特性:
•激光波长非常稳定,可以精密测量测量的要求。 •激光波长非常短,可以用于高精度测量。 •激光具有干涉特性。
现代集成制造与数控装备研究所 CIMS
机械与汽车工程学院
光的干涉
•当相位角相差180°(半个波长)时,复合光强为0,产生暗条纹。
现代集成制造与数控装备研究所 CIMS
机械与汽车工程学院
二、激光干涉测量原理
XL-80激光测量回路如下
•如果测量光路长度改变(角 锥反射镜C移动),干涉光束 的相对相位将改变,由此产 生的相长干涉和相消干涉的 循环将导致叠加光束强度的 明暗周期变化。 • 角锥反射镜每移动316 nm, 就会出现一个光强变化循环 (明-暗-明)通过计算这 些循环来测量移动。 • 通过在这些循环之间进行相 位细分,实现更高分辨率 (1 nm) 的测量。
高精度激光干涉仪的调试步骤与测量结果分析方法

高精度激光干涉仪的调试步骤与测量结果分析方法激光干涉仪是一种用于测量光程差的精密仪器,在科研、工业制造和生物医学等领域得到了广泛应用。
高精度激光干涉仪能够实现亚纳米级的测量精度,因此其调试步骤和测量结果分析方法非常关键。
一、激光干涉仪的调试步骤1. 光学路径的校准:激光干涉仪中最重要的部分是干涉仪的光路。
首先要保证光源的稳定性和亮度,通常使用氦氖激光器作为光源,并使用聚焦透镜获得平行光。
然后要调整两束光线的平行度,使用准直器或像差调节器进行调整。
最后,通过调整反射镜和平行板的位置,使两束光线相互平行,保证光束之间的光程差为零。
2. 干涉图案的调试:将两束光线合并后,会出现一条干涉条纹。
通过调节平行板的角度或物镜的位置,可以调整干涉条纹的间距和亮度。
要使条纹清晰且对称,可以适当调整反射镜的位置。
3. 线性度和非线性度的校准:利用参考杆来测试激光干涉仪的线性度和非线性度。
将参考杆平行放置在干涉仪的测量平台上,测量不同位置处光程差与参考杆长度的关系。
通过分析这些数据,可以得到激光干涉仪的线性度和非线性度,并进行校准。
4. 测量系统误差的校正:激光干涉仪在实际测量中可能存在系统误差,如温度变化、机械振动等。
通过在实验中引入补偿措施,可以对这些误差进行校正。
例如,可以在实验过程中保持温度稳定,使用防振设备减小机械振动对测量的影响。
5. 预处理与信号分析:在测量过程中,激光干涉仪会产生一系列干涉信号。
这些信号需要进行预处理和信号分析,以获得最终的测量结果。
常用的方法包括锁相放大器、频谱分析仪等。
二、测量结果分析方法1. 干涉条纹解析:干涉仪产生的干涉条纹是通过测量光程差得到的。
根据不同的应用需求,可以利用不同的方法对条纹进行解析,如三角法、Fourier变换等。
解析干涉条纹可以得到物体的形貌信息和变形分布等。
2. 测量结果精度评估:对于高精度激光干涉仪的测量结果,需要进行精度评估来判断测量结果的可靠性。
常用的方法包括误差分析、重复性测试和对比实验等。
激光干涉仪校准坐标定位测量系统线性轴线精度

激光干涉仪校准坐标定位测量系统线性轴线精度激光干涉仪具有实现线性、角度、直线度、垂直度、回转轴等几何量的检测功能。
可以检测数控机床、三坐标测量机等精密运动设备运动导轨的线性定位精度、重复定位精度等;同时也能检测运动导轨的俯仰角、扭摆角、直线度和垂直度;并可以校准机床的回转轴。
1.线性轴线校准方法1.1.线性轴线校准前调整调整激光干涉仪支架使激光头在目力观察下基本与被测轴的运动靠向一致。
连接好计算机和环境补偿单元,环境温度传感器尽量靠近激光光束,大致处于被校轴线的中间位置。
材料温度传感器尽量靠近被校轴线的检测元件,测量点不少于2点。
避免把温度传感器安装在热源(例如电机、齿轮箱、轴承座或排气口等)和电子干扰源附近,校准装置要充分预热。
移动运动部件到测量起始位置,安装线性干涉镜和线性反射镜如有可能尽量使其靠近并处在同一个地基基座之上。
反复调整激光头的扭摆角和俯仰角,使激光光轴与被校轴线平行,保证激光信号强度在全行程内满足数据采集要求。
移动运动部件,使干涉镜与反射镜距离最小,并将激光器读数置零。
然后移动运动部件到最远位置,微调激光头的扭摆角和俯仰角,使激光干涉仪读数的绝对值最大。
以上操作反复进行至最佳状态。
1.2.参数的设置编制数控机床运行程序,运行程序中应包括机床的进给速度,按照 1.1.条设置目标位置、越程量,在目标点的停顿时间和循环运行次数,设置激光干涉仪参数,温度膨胀系教与用于轴线定位的检测元件材料温度膨胀系数一致(可以向供方或制造厂索取)。
设置的目标点和定位方式要与数控机床运行程序一致。
越程量的设置不应大于数控机床运行程序所设的越程量,采样时间的长短要保证采集到稳定的数据并小于数控机床运行程序所设定的停顿时间。
1.3.数据采集对于行程不大于2000mm的线性轴线在所有目标位置上按标准循环方式(见C1)连续测量,对每个目标位置P i在每一方向上作5次趋近,由校准装置测得实际到达位置P ij,并计算出X ij,特殊情况(如重型机床)也可按照阶梯循环方式(见C2)进行测量。
XL-80激光干涉仪系统 说明书

XL-80激光干涉仪系统机床及坐标测量机按照国际标准验证机床和坐标测量机的精品工具研究及计量供校准和研究实验室使用的可溯源性测量运动系统独特动态性能,实现高速、高分辨率检测Renishaw设计、制造和提供激光干涉仪系统已有二十多年的历史。
其生产的ML10激光干涉仪系统已经成为使用精度及可靠性的标准。
新型XL-80激光干涉仪系统在便携性、系统精度及动态测量性能方面获得显著提高。
其使用更快捷、方便,且保留了纯粹干涉测量系统的优点,该系统结合了成熟的技术及丰富的经验,使得Renishaw激光系统成为全球用户的首选系统。
XL-80保留了Renishaw产品在日常使用中、在紧要之处展现出高精度、可靠性和耐用性等重要优点。
更轻巧的激光测量及校准2X L激光测量系统的性能提升,更广泛地适合各类客户的测量选择。
本系统尺寸及重量显著小于已有系统,便携性更强,使用更方便,以便贵公司领先于同行。
XL-80激光系统X L -80激光系统可以产生极其稳定的激光光束,采用的波长可溯源至国家和国际标准。
激光稳频精度为1年内±0.05 p p m ,1小时内 ±0.02 ppm 。
这种优异的性能是通过动态热控制技术将激光管长度变化控制在纳米范围内而完成的。
在整个环境范围内,即0 - 40 °C (32 - 104 °F )及650 - 1150 mbar ,保证±0.5 ppm 的线性测量精度。
读数以50 kHZ 频率读取,最高线性测量速度可达 4 m/s ,即使在最高速度下线性分辨率仍可达1 nm 。
由于XL 系统的所有测量项目(不仅仅是线性测量)均采用激光干涉原理,您可以充分信赖所有的测量精度。
该新型系统的基础组件是一个轻型激光头 (XL-80) 和一个独立的补偿单元系统 (XC-80)XL80和XC80可经由USB 直接与计算机连接,无需单独的接口。
激光系统的标准配置还具有一个辅助模拟信号输出,正交输出为工厂设定选项。
双频激光干涉仪测量
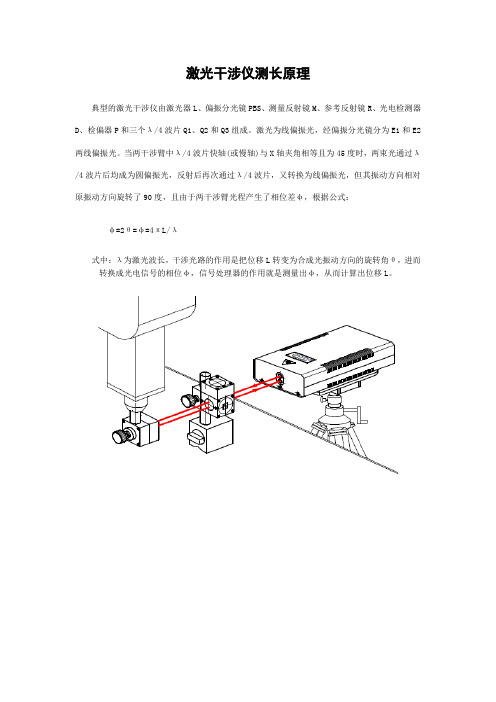
激光干涉仪测长原理典型的激光干涉仪由激光器L、偏振分光镜PBS、测量反射镜M、参考反射镜R、光电检测器D、检偏器P和三个λ/4波片Q1、Q2和Q3组成。
激光为线偏振光,经偏振分光镜分为E1和E2两线偏振光。
当两干涉臂中λ/4波片快轴(或慢轴)与X轴夹角相等且为45度时,两束光通过λ/4波片后均成为圆偏振光,反射后再次通过λ/4波片,又转换为线偏振光,但其振动方向相对原振动方向旋转了90度,且由于两干涉臂光程产生了相位差φ,根据公式:φ=2θ=φ=4πL/λ式中:λ为激光波长,干涉光路的作用是把位移L转变为合成光振动方向的旋转角θ,进而转换成光电信号的相位φ,信号处理器的作用就是测量出φ,从而计算出位移L。
垂直度的测量工具在一台机器施工实例:多轴系统双频激光干涉仪的工作原理双频激光干涉仪其双频激光测量系统由氦氖双频遥置激光干涉仪和电子实时分解系统所组成。
它具有以下优点:稳定性好,抗干扰能力强,可在较快的位移速度下测量较大的距离,使用范围广,使用方便,测量精度高。
基本原理:如图11-2所示,激光双频干涉仪的氦氖激光管,在外加直流轴向磁场的作用下,产生塞曼效应,将激光分成频率为f1和f2,旋向相反的两圆偏振光,经λ/4波片变为线偏振光。
调整λ/4玻片的旋转角度,使f l和f2的振动平面相互垂直,以互垂直,以作激光干涉图11-2 双频激光干涉仪的工作原理图1.激光管2.λ/4波片3. 参考分光镜4. 偏振分光棱境5. 基准锥体棱镜6.移动测量棱体7.10.12.检偏振镜8.9.11.光电管13.光电调制器仪的光源。
当两个线偏振光经过参考分光镜3时(见图11-2),大部分则由偏振分光棱境4分成两束。
偏振面垂直入射面的f2全反射到与分光镜固定在一起的基准锥体棱镜上;偏振面在入射面内的f l则全部通过而射到移动测量棱体6上。
由这两个锥体棱镜反射回来的光束在偏振分光镜上合并,并在检偏振镜上混频。
当移动锥体棱镜时,由于多普勒效应,f1变成f1+△f,因而光电元件8所得到的信号是(f1+△f)-f2。
激光干涉仪检测与调整过程讲解

激光干涉仪检测与调整过程讲解激光干涉仪是一种常用的光学测量工具,可以用于测量非常小的距离和角度变化。
它通常由两个关键组件组成:稳定的激光源和一个高质量的干涉仪。
在本文中,我们将介绍激光干涉仪的工作原理、使用方法和调整过程。
激光干涉仪的工作原理激光干涉仪的设计基于激光干涉原理,该原理是将激光束分为两个光束,分别通过被测物体的两个侧面,然后将两束光重新合成。
当光束互相干涉时,它们会产生间隔的明暗条纹,这些条纹的间隔可以被用于测量小的长度变化。
在实践中,激光干涉仪使用的激光源通常是由半导体光源提供的,这种光源在可见光范围内有非常狭窄的频谱分布。
可以使用反射镜和分束器将光分为两束。
在光路上分别安装一个光栅使得干涉仪可以使用逆反射干涉,提高测量的精度。
使用激光干涉仪进行测量在进行测量时,需将两束光线分别传输给要被测量的物体的两个侧面。
当两束光线重新合并时,它们会形成明暗相间的条纹图案,这是干涉产生的结果。
通过测量条纹的间隔,我们可以轻松地计算出被测物体的位移变化。
激光干涉仪可用于测量非常小的长度、位移和角度变化,其度量精度可以达到亚微米级别。
此外,通过使用高质量的干涉仪,我们可以将其用于高精密表面形貌测量。
调整激光干涉仪如果干涉仪的调试不当,会导致干涉条纹模糊或者严重扭曲的情况,降低干涉仪的度量精度。
因此,在使用激光干涉仪进行测量之前,必须对其进行调整。
以下是调整激光干涉仪的步骤:1.调整激光源:确保激光源光束的宽度和强度足够稳定。
可以将激光传输到墙上的标定留置板来检查光束的准直性和焦点。
2.双色干涉圈合并:在数字式激光干涉仪中,需要将蓝色和红色光线重合在一个干涉圈内。
使用向一侧旋转/切向板识别同步点,其中图案由蓝色和红色光线表示。
提示:每次转动方向8分钟。
3.气象因素:排除湿度、温度固定输出、地面震动等因素的影响。
工作时确保放在一个平稳的场所,切不可震动。
4.探头选择:一般选其低灵敏度的测头。
不完全平整的表面则需要高灵敏度的探头。
激光干涉测量技术
式中n为空气的折射率,Lm为目标反射镜M2到分光点O的距
离。Lc为参考反射镜M1到分光点O的距离。
测量结束时。目标反射镜M2移过被测长度L后,处于M2’的
位置。此时两光束的光程差
‹#›
2021/2/20
迈克尔逊干涉仪测长示意图
在测量开始和结束这段时间里,光程差的变化量
光程差每变化一个波长,干涉条纹就明暗交替变化一次, 则测量过程中与d△相对应的干涉条纹变化次数
‹#›
2021/2/20
(a)分波阵面法;(b)分振幅法
‹#›
2021/2/20
(c)分偏振法
‹#›
2021/2/20
(3)分偏振法 在偏振干涉仪系统中需要采用偏振分光器,
它由一对玻璃棱镜相胶合而成,在其中一块棱镜的胶合面
上交替蒸镀氟化镁和硫化锌膜层。入射光以布儒斯特角进
入介质层,经多次透射和反射得到高偏振度的S分量反射光
器件。
(3)直角棱镜反射器 如下图(b)所示,它的三个角分别为
45◦、45◦ 、90◦ ,光入射在斜面上。它只有两个反射面,
加工起人射面的平面偏振光不受干扰。
‹#›
2021/2/20
(4)“猫眼”反射器 如下图(c)所示,它由一个透镜L和一个凹 面反射镜M组成、反射镜放在透镜的主焦点上,从左边来的 入射光束聚焦在反射镜上,反射镜又把光束反射到透镜,并 沿与入射光平行的方向射出(与反射镜的曲率无关)。若反别镜 的曲率中心C’和透镜的中心C重合,那么当透镜和反射镜一起 绕C点旋转时,光程保持不变:“猫眼“反射器的优点是容易 加工和不影响偏振光的传输。在光程不长的情况下也可考虑 用平面反射镜代替凹面反射镜,这样更容易加工和调整。
在干涉测量中,干涉仪以干涉条纹来反映被测件的信 息,其原理是将光分成两路,干涉条纹是两路光光程差相 同点联成的轨迹。而光程差△是干涉仪两支光路光程之差, 可用下式表示
激光干涉测量技术

干涉条纹的形成
分波面干涉
通过分波面干涉,将一束激光分成两束或多束相 干光波,使它们在空间中相遇。
固定பைடு நூலகம்程差
为了形成稳定的干涉条纹,需要保证两束光的光 程差保持恒定。
干涉图样的形成
当两束相干光波相遇时,它们的光程差会导致光 波的相位差,从而形成明暗交替的干涉图样。
激光干涉测量技术
contents
目录
• 激光干涉测量技术概述 • 激光干涉测量技术的基本原理 • 激光干涉测量技术的分类 • 激光干涉测量技术的应用实例 • 激光干涉测量技术的发展趋势与挑战
01 激光干涉测量技术概述
定义与特点
定义
激光干涉测量技术是一种基于光 的干涉现象进行长度、角度等物 理量测量的高精度测量技术。
相位等参数。
通过将激光束反射到被测物体上, 并观察干涉条纹的变化,可以精
确测量物体的振动情况。
这种技术广泛应用于机械、航空 航天、汽车和能源等领域,用于 监测设备的运行状态和评估结构
的稳定性。
光学元件检测
激光干涉技术可以用于检测光 学元件的质量和性能,如透镜、 反射镜和光栅等。
通过测量干涉条纹的数量和分 布,可以评估光学元件的表面 质量和光学性能。
该技术具有更高的测量精度和更大的 测量范围,适用于大型结构、长距离 和高精度测量。
光学多普勒激光干涉测量技术
光学多普勒激光干涉测量技术是利用多普勒效应和干涉现象 相结合的原理,通过测量激光束在运动物体表面反射后产生 的多普勒频移来测量物体的速度、位移和振动等参数。
该技术具有高精度、高灵敏度和实时性的优点,广泛应用于 流速测量、振动分析、表面形貌测量等领域。
激光干涉仪工作原理
激光干涉仪工作原理激光干涉仪是一种利用激光干涉原理测量物体表面形貌、位移、振动等参数的精密光学仪器。
它主要由激光器、分束器、反射镜、光电探测器和信号处理系统等组成。
激光干涉仪的工作原理是基于激光的干涉现象,通过测量光波的相位差来实现对被测物理量的测量。
首先,激光器产生一束高度相干的激光光束,经过分束器分成两束光线,分别照射到被测物体表面并被反射回来。
这两束光线再次汇聚在分束器处,形成干涉条纹。
当被测物体发生微小位移或形貌变化时,其表面反射的光程差也会发生变化,导致干涉条纹位置发生移动。
通过测量干涉条纹的位移,可以计算出被测物体的位移量。
激光干涉仪的工作原理基于干涉现象,利用光波的相位差来测量被测物理量。
在干涉条纹的形成过程中,两束光线的相位差决定了干涉条纹的位置。
当两束光线的相位差为整数倍的波长时,它们将加强干涉,形成亮条纹;当相位差为半波长的奇数倍时,它们将相互抵消,形成暗条纹。
因此,通过测量干涉条纹的移动,就可以得到被测物体的微小位移量。
激光干涉仪在工业、科研和医疗等领域有着广泛的应用。
在工业领域,它可以用于测量零件的尺寸、形貌和表面质量,实现精密加工和质量控制;在科研领域,它可以用于研究微小振动、形变和位移等参数,提供实验数据支持;在医疗领域,它可以用于眼底血管的形态学和血流动力学参数的测量,为临床诊断提供重要参考。
总之,激光干涉仪是一种基于激光干涉原理的精密光学测量仪器,通过测量干涉条纹的位移来实现对被测物理量的测量。
它在工业、科研和医疗领域有着广泛的应用前景,为实现精密测量和科学研究提供了重要的技术手段。
雷尼绍激光干涉仪产品简介
apply innovationRENISHAW雷尼绍 XL-80 激光测量系统 • Renishaw简介 • 激光的介绍 • 激光干涉仪系统组件 • 雷尼绍激光干涉仪的测试原理 • 测量规格 • 典型案例分析 • 荣誉客户apply innovationRENISHAW简介• 雷尼绍公司在计量学和拉曼光谱仪器领域居世界领先地位。
总 部 (Renishaw plc) 位于英国伦敦西部的格劳斯特郡(Gloucestershire)。
她是一家 跨国公司,在世界各地有14家子公司。
中国大陆的业务由雷尼绍(香港)有限公司 归口负责。
• 30多年来,Renishaw一直是计量、即测量科学领域的创新者,实现了按照国际标准 进行测量。
在计量、运动控制、机器校准、牙科CAD/CAM及光谱学领域,Renishaw以 创新产品提高精度、效率和质量 • 机床测量和校准用的激光干涉仪和球感仪系统;高精度定位反馈编码器系统-servo 代理apply innovation基本概念 – 激光– 激光头输出的光束是正弦波的激光. 激光的波长是633nm 在雷尼绍XL-80激光 测试系统中。
Wavelength– 激光有以下3个重要特性: • 激光的波长是精确已知的可以被应用于高精度测量 • 激光的波长很短可以应用于高分辨率的测量 • 激光的相位是一致的,空间相干性apply innovationXL-80 系统组件XC-80USB - one sensor reading update every 7 secsXL-80LaserXLUSB - 50kHz fringe count data and statusNotebook PCQuickView XLapply innovationXL-80激光头性能指标系统精度(整个工作范围)±0.5ppm (0~40 ℃) 0.05ppm 0.001 um 4.0m/sec 50KHz 0 - 80 metres(在长距光学镜配合下)激光稳频精度 分辨率 最大测量速度 最高采样频率 测量范围 预热时间更短 激光信号强度指示灯~5分钟专利技术ABCDHapply innovationXL-80激光头性能指标• 外接电源• USB接口– Mini-USB 端口 – 标准USB电缆• DIP开关 & 辅助I/O端口– – – – 遥控触发 正交输出 模拟信号输出 长距离接收apply innovationXC-80补偿单元和传感器“智能”化传感器设计 • 通过RS485传送数字信号 • 可更换的传感器电缆 • 更快的刷新频率,每隔7秒 • 更紧凑的电缆接头设计 • 自降温设计空气湿度 空气压力精度: ±1.0 mbar 精度: ±6%空气温度精度: ±0.2 °C材料温度精度: ±0.1 °Capply innovationXC-80补偿单元和传感器• 激光的波长取决于光路中介质的折射率,空气折射率受环境的温度 、空气压力、相对湿度、材料温度等因素影响,所以renishaw开发 了XC-80补偿单元。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
激光干涉测量系统
Laser Interferometer
型号:DISTAX L-LM-20B
购入时间:2004年01月
价格:303400元(人民币)
制造厂家:日本东京精密公司
安装地点:延长校区机械楼102室
所在单位:机自学院精密机械系
所在地址:延长路149号
联系人:程维明
联系电话:(021)56333903
仪器简介:
激光干涉测量系统是以激光为长度基准,对长度等几何量进行精密测量的仪器。
可以进行精密位移测量,配以相应的工夹具可以测量大型装置的长度、角度等几何量。
该激光干涉仪以光纤为光束传导介质,并带有空气传感器和工件温度传感器,使用、安装方便,精度高。
主要技术指标:
测量分辨率:10nm;测量精度:0.1μm;测量速度:0.4ms-1;激光功率:1Mw
应用范围:
长度测量、位移测量等。