Static and dynamic properties of vortices in anisotropic magnetic disks
物理化学基本概念

物理化学概念及术语A B C D E F G H I J K L M N O P Q R S T U V W X Y Z概念及术语 (16)BET公式BET formula (16)DLVO理论 DLVO theory (16)HLB法hydrophile-lipophile balance method (16)pVT性质 pVT property (16)ζ电势 zeta potential (16)阿伏加德罗常数 Avogadro’number (16)阿伏加德罗定律 Avogadro law (16)阿累尼乌斯电离理论Arrhenius ionization theory (16)阿累尼乌斯方程Arrhenius equation (17)阿累尼乌斯活化能 Arrhenius activation energy (17)阿马格定律 Amagat law (17)艾林方程 Erying equation (17)爱因斯坦光化当量定律 Einstein’s law of photochemical equivalence (17)爱因斯坦-斯托克斯方程 Einstein-Stokes equation (17)安托万常数 Antoine constant (17)安托万方程 Antoine equation (17)盎萨格电导理论Onsager’s theory of conductance (17)半电池half cell (17)半衰期half time period (18)饱和液体 saturated liquids (18)饱和蒸气 saturated vapor (18)饱和吸附量 saturated extent of adsorption (18)饱和蒸气压 saturated vapor pressure (18)爆炸界限 explosion limits (18)比表面功 specific surface work (18)比表面吉布斯函数 specific surface Gibbs function (18)比浓粘度 reduced viscosity (18)标准电动势 standard electromotive force (18)标准电极电势 standard electrode potential (18)标准摩尔反应焓 standard molar reaction enthalpy (18)标准摩尔反应吉布斯函数 standard Gibbs function of molar reaction (18)标准摩尔反应熵 standard molar reaction entropy (19)标准摩尔焓函数 standard molar enthalpy function (19)标准摩尔吉布斯自由能函数 standard molar Gibbs free energy function (19)标准摩尔燃烧焓 standard molar combustion enthalpy (19)标准摩尔熵 standard molar entropy (19)标准摩尔生成焓 standard molar formation enthalpy (19)标准摩尔生成吉布斯函数 standard molar formation Gibbs function (19)标准平衡常数 standard equilibrium constant (19)标准氢电极 standard hydrogen electrode (19)标准态 standard state (19)标准熵 standard entropy (20)标准压力 standard pressure (20)标准状况 standard condition (20)表观活化能apparent activation energy (20)表观摩尔质量 apparent molecular weight (20)表观迁移数apparent transference number (20)表面 surfaces (20)表面过程控制 surface process control (20)表面活性剂surfactants (21)表面吸附量 surface excess (21)表面张力 surface tension (21)表面质量作用定律 surface mass action law (21)波义尔定律 Boyle law (21)波义尔温度 Boyle temperature (21)波义尔点 Boyle point (21)玻尔兹曼常数 Boltzmann constant (22)玻尔兹曼分布 Boltzmann distribution (22)玻尔兹曼公式 Boltzmann formula (22)玻尔兹曼熵定理 Boltzmann entropy theorem (22)泊Poise (22)不可逆过程 irreversible process (22)不可逆过程热力学thermodynamics of irreversible processes (22)不可逆相变化 irreversible phase change (22)布朗运动 brownian movement (22)查理定律 Charle’s law (22)产率 yield (23)敞开系统 open system (23)超电势 over potential (23)沉降 sedimentation (23)沉降电势 sedimentation potential (23)沉降平衡 sedimentation equilibrium (23)触变 thixotropy (23)粗分散系统 thick disperse system (23)催化剂 catalyst (23)单分子层吸附理论 mono molecule layer adsorption (23)单分子反应 unimolecular reaction (23)单链反应 straight chain reactions (24)弹式量热计 bomb calorimeter (24)道尔顿定律 Dalton law (24)道尔顿分压定律 Dalton partial pressure law (24)德拜和法尔肯哈根效应Debye and Falkenhagen effect (24)德拜立方公式 Debye cubic formula (24)德拜-休克尔极限公式 Debye-Huckel’s limiting equation (24)等焓过程 isenthalpic process (24)等焓线isenthalpic line (24)等几率定理 theorem of equal probability (24)等温等容位Helmholtz free energy (25)等温等压位Gibbs free energy (25)等温方程 equation at constant temperature (25)低共熔点 eutectic point (25)低共熔混合物 eutectic mixture (25)低会溶点 lower consolute point (25)低熔冰盐合晶 cryohydric (26)第二类永动机 perpetual machine of the second kind (26)第三定律熵 Third-Law entropy (26)第一类永动机 perpetual machine of the first kind (26)缔合化学吸附 association chemical adsorption (26)电池常数 cell constant (26)电池电动势 electromotive force of cells (26)电池反应 cell reaction (27)电导 conductance (27)电导率 conductivity (27)电动势的温度系数 temperature coefficient of electromotive force (27)电动电势 zeta potential (27)电功electric work (27)电化学 electrochemistry (27)电化学极化 electrochemical polarization (27)电极电势 electrode potential (27)电极反应 reactions on the electrode (27)电极种类 type of electrodes (27)电解池 electrolytic cell (28)电量计 coulometer (28)电流效率current efficiency (28)电迁移 electro migration (28)电迁移率 electromobility (28)电渗 electroosmosis (28)电渗析 electrodialysis (28)电泳 electrophoresis (28)丁达尔效应 Dyndall effect (28)定容摩尔热容 molar heat capacity under constant volume (28)定容温度计 Constant voIume thermometer (28)定压摩尔热容 molar heat capacity under constant pressure (29)定压温度计 constant pressure thermometer (29)定域子系统 localized particle system (29)动力学方程kinetic equations (29)动力学控制 kinetics control (29)独立子系统 independent particle system (29)对比摩尔体积 reduced mole volume (29)对比体积 reduced volume (29)对比温度 reduced temperature (29)对比压力 reduced pressure (29)对称数 symmetry number (29)对行反应reversible reactions (29)对应状态原理 principle of corresponding state (29)多方过程polytropic process (30)多分子层吸附理论 adsorption theory of multi-molecular layers (30)二级反应second order reaction (30)二级相变second order phase change (30)法拉第常数 faraday constant (31)法拉第定律 Faraday’s law (31)反电动势back E.M.F. (31)反渗透 reverse osmosis (31)反应分子数 molecularity (31)反应级数 reaction orders (31)反应进度 extent of reaction (32)反应热heat of reaction (32)反应速率rate of reaction (32)反应速率常数 constant of reaction rate (32)范德华常数 van der Waals constant (32)范德华方程 van der Waals equation (32)范德华力 van der Waals force (32)范德华气体 van der Waals gases (32)范特霍夫方程 van’t Hoff equation (32)范特霍夫规则 van’t Hoff rule (33)范特霍夫渗透压公式 van’t Hoff equation of osmotic pressure (33)非基元反应 non-elementary reactions (33)非体积功 non-volume work (33)非依时计量学反应 time independent stoichiometric reactions (33)菲克扩散第一定律 Fick’s first law of diffusion (33)沸点 boiling point (33)沸点升高 elevation of boiling point (33)费米-狄拉克统计Fermi-Dirac statistics (33)分布 distribution (33)分布数 distribution numbers (34)分解电压 decomposition voltage (34)分配定律 distribution law (34)分散系统 disperse system (34)分散相 dispersion phase (34)分体积 partial volume (34)分体积定律 partial volume law (34)分压 partial pressure (34)分压定律 partial pressure law (34)分子反应力学 mechanics of molecular reactions (34)分子间力 intermolecular force (34)分子蒸馏molecular distillation (35)封闭系统 closed system (35)附加压力 excess pressure (35)弗罗因德利希吸附经验式 Freundlich empirical formula of adsorption (35)负极 negative pole (35)负吸附 negative adsorption (35)复合反应composite reaction (35)盖.吕萨克定律 Gay-Lussac law (35)盖斯定律 Hess law (35)甘汞电极 calomel electrode (35)感胶离子序 lyotropic series (35)杠杆规则 lever rule (35)高分子溶液 macromolecular solution (36)高会溶点 upper consolute point (36)隔离法the isolation method (36)格罗塞斯-德雷珀定律 Grotthus-Draoer’s law (36)隔离系统 isolated system (37)根均方速率 root-mean-square speed (37)功 work (37)功函work content (37)共轭溶液 conjugate solution (37)共沸温度 azeotropic temperature (37)构型熵configurational entropy (37)孤立系统 isolated system (37)固溶胶 solid sol (37)固态混合物 solid solution (38)固相线 solid phase line (38)光反应 photoreaction (38)光化学第二定律 the second law of actinochemistry (38)光化学第一定律 the first law of actinochemistry (38)光敏反应 photosensitized reactions (38)光谱熵 spectrum entropy (38)广度性质 extensive property (38)广延量 extensive quantity (38)广延性质 extensive property (38)规定熵 stipulated entropy (38)过饱和溶液 oversaturated solution (38)过饱和蒸气 oversaturated vapor (38)过程 process (39)过渡状态理论 transition state theory (39)过冷水 super-cooled water (39)过冷液体 overcooled liquid (39)过热液体 overheated liquid (39)亥姆霍兹函数 Helmholtz function (39)亥姆霍兹函数判据 Helmholtz function criterion (39)亥姆霍兹自由能 Helmholtz free energy (39)亥氏函数 Helmholtz function (39)焓 enthalpy (39)亨利常数 Henry constant (39)亨利定律 Henry law (39)恒沸混合物 constant boiling mixture (40)恒容摩尔热容 molar heat capacity at constant volume (40)恒容热 heat at constant volume (40)恒外压 constant external pressure (40)恒压摩尔热容 molar heat capacity at constant pressure (40)恒压热 heat at constant pressure (40)化学动力学chemical kinetics (40)化学反应计量式 stoichiometric equation of chemical reaction (40)化学反应计量系数 stoichiometric coefficient of chemical reaction (40)化学反应进度 extent of chemical reaction (41)化学亲合势 chemical affinity (41)化学热力学chemical thermodynamics (41)化学势 chemical potential (41)化学势判据 chemical potential criterion (41)化学吸附 chemisorptions (41)环境 environment (41)环境熵变 entropy change in environment (41)挥发度volatility (41)混合熵 entropy of mixing (42)混合物 mixture (42)活度 activity (42)活化控制 activation control (42)活化络合物理论 activated complex theory (42)活化能activation energy (43)霍根-华森图 Hougen-Watson Chart (43)基态能级 energy level at ground state (43)基希霍夫公式 Kirchhoff formula (43)基元反应elementary reactions (43)积分溶解热 integration heat of dissolution (43)吉布斯-杜亥姆方程 Gibbs-Duhem equation (43)吉布斯-亥姆霍兹方程 Gibbs-Helmhotz equation (43)吉布斯函数 Gibbs function (43)吉布斯函数判据 Gibbs function criterion (44)吉布斯吸附公式Gibbs adsorption formula (44)吉布斯自由能 Gibbs free energy (44)吉氏函数 Gibbs function (44)极化电极电势 polarization potential of electrode (44)极化曲线 polarization curves (44)极化作用 polarization (44)极限摩尔电导率 limiting molar conductivity (44)几率因子 steric factor (44)计量式 stoichiometric equation (44)计量系数 stoichiometric coefficient (45)价数规则 rule of valence (45)简并度 degeneracy (45)键焓bond enthalpy (45)胶冻 broth jelly (45)胶核 colloidal nucleus (45)胶凝作用 demulsification (45)胶束micelle (45)胶体 colloid (45)胶体分散系统 dispersion system of colloid (45)胶体化学 collochemistry (45)胶体粒子 colloidal particles (45)胶团 micelle (45)焦耳Joule (45)焦耳-汤姆生实验 Joule-Thomson experiment (46)焦耳-汤姆生系数 Joule-Thomson coefficient (46)焦耳-汤姆生效应 Joule-Thomson effect (46)焦耳定律 Joule's law (46)接触电势contact potential (46)接触角 contact angle (46)节流过程 throttling process (46)节流膨胀 throttling expansion (46)节流膨胀系数 coefficient of throttling expansion (46)结线 tie line (46)结晶热heat of crystallization (47)解离化学吸附 dissociation chemical adsorption (47)界面 interfaces (47)界面张力 surface tension (47)浸湿 immersion wetting (47)浸湿功 immersion wetting work (47)精馏 rectify (47)聚(合)电解质polyelectrolyte (47)聚沉 coagulation (47)聚沉值 coagulation value (47)绝对反应速率理论 absolute reaction rate theory (47)绝对熵 absolute entropy (47)绝对温标absolute temperature scale (48)绝热过程 adiabatic process (48)绝热量热计adiabatic calorimeter (48)绝热指数 adiabatic index (48)卡诺定理 Carnot theorem (48)卡诺循环 Carnot cycle (48)开尔文公式 Kelvin formula (48)柯诺瓦洛夫-吉布斯定律 Konovalov-Gibbs law (48)科尔劳施离子独立运动定律 Kohlrausch’s Law of Independent Migration of Ions (48)可能的电解质potential electrolyte (49)可逆电池 reversible cell (49)可逆过程 reversible process (49)可逆过程方程 reversible process equation (49)可逆体积功 reversible volume work (49)可逆相变 reversible phase change (49)克拉佩龙方程 Clapeyron equation (49)克劳修斯不等式 Clausius inequality (49)克劳修斯-克拉佩龙方程 Clausius-Clapeyron equation (49)控制步骤 control step (50)库仑计 coulometer (50)扩散控制 diffusion controlled (50)拉普拉斯方程 Laplace’s equation (50)拉乌尔定律 Raoult law (50)兰格缪尔-欣谢尔伍德机理 Langmuir-Hinshelwood mechanism (50)雷利公式 Rayleigh equation (50)兰格缪尔吸附等温式 Langmuir adsorption isotherm formula (50)冷冻系数coefficient of refrigeration (50)冷却曲线 cooling curve (51)离解热heat of dissociation (51)离解压力dissociation pressure (51)离域子系统 non-localized particle systems (51)离子的标准摩尔生成焓 standard molar formation of ion (51)离子的电迁移率 mobility of ions (51)离子的迁移数 transport number of ions (51)离子独立运动定律 law of the independent migration of ions (51)离子氛 ionic atmosphere (51)离子强度 ionic strength (51)理想混合物 perfect mixture (52)理想气体 ideal gas (52)理想气体的绝热指数 adiabatic index of ideal gases (52)理想气体的微观模型 micro-model of ideal gas (52)理想气体反应的等温方程 isothermal equation of ideal gaseous reactions (52)理想气体绝热可逆过程方程 adiabatic reversible process equation of ideal gases (52)理想气体状态方程 state equation of ideal gas (52)理想稀溶液 ideal dilute solution (52)理想液态混合物 perfect liquid mixture (52)粒子 particles (52)粒子的配分函数 partition function of particles (53)连串反应consecutive reactions (53)链的传递物 chain carrier (53)链反应 chain reactions (53)量热熵 calorimetric entropy (53)量子统计quantum statistics (53)量子效率 quantum yield (53)临界参数 critical parameter (53)临界常数 critical constant (53)临界点 critical point (53)临界胶束浓度critical micelle concentration (53)临界摩尔体积 critical molar volume (54)临界温度 critical temperature (54)临界压力 critical pressure (54)临界状态 critical state (54)零级反应zero order reaction (54)流动电势 streaming potential (54)流动功 flow work (54)笼罩效应 cage effect (54)路易斯-兰德尔逸度规则 Lewis-Randall rule of fugacity (54)露点 dew point (54)露点线 dew point line (54)麦克斯韦关系式 Maxwell relations (55)麦克斯韦速率分布 Maxwell distribution of speeds (55)麦克斯韦能量分布 MaxwelIdistribution of energy (55)毛细管凝结 condensation in capillary (55)毛细现象 capillary phenomena (55)米凯利斯常数 Michaelis constant (55)摩尔电导率 molar conductivity (56)摩尔反应焓 molar reaction enthalpy (56)摩尔混合熵 mole entropy of mixing (56)摩尔气体常数 molar gas constant (56)摩尔热容 molar heat capacity (56)摩尔溶解焓 mole dissolution enthalpy (56)摩尔稀释焓 mole dilution enthalpy (56)内扩散控制 internal diffusions control (56)内能 internal energy (56)内压力 internal pressure (56)能级 energy levels (56)能级分布 energy level distribution (57)能量均分原理 principle of the equipartition of energy (57)能斯特方程 Nernst equation (57)能斯特热定理 Nernst heat theorem (57)凝固点 freezing point (57)凝固点降低 lowering of freezing point (57)凝固点曲线 freezing point curve (58)凝胶 gelatin (58)凝聚态 condensed state (58)凝聚相 condensed phase (58)浓差超电势 concentration over-potential (58)浓差极化 concentration polarization (58)浓差电池 concentration cells (58)帕斯卡pascal (58)泡点 bubble point (58)泡点线 bubble point line (58)配分函数 partition function (58)配分函数的析因子性质 property that partition function to be expressed as a product of the separate partition functions for each kind of state (58)碰撞截面 collision cross section (59)碰撞数 the number of collisions (59)偏摩尔量 partial mole quantities (59)平衡常数(理想气体反应) equilibrium constants for reactions of ideal gases (59)平动配分函数 partition function of translation (59)平衡分布 equilibrium distribution (59)平衡态 equilibrium state (60)平衡态近似法 equilibrium state approximation (60)平衡状态图 equilibrium state diagram (60)平均活度 mean activity (60)平均活度系统 mean activity coefficient (60)平均摩尔热容 mean molar heat capacity (60)平均质量摩尔浓度 mean mass molarity (60)平均自由程mean free path (60)平行反应parallel reactions (61)破乳 demulsification (61)铺展 spreading (61)普遍化范德华方程 universal van der Waals equation (61)其它功 the other work (61)气化热heat of vaporization (61)气溶胶 aerosol (61)气体常数 gas constant (61)气体分子运动论 kinetic theory of gases (61)气体分子运动论的基本方程 foundamental equation of kinetic theory of gases (62)气溶胶 aerosol (62)气相线 vapor line (62)迁移数 transport number (62)潜热latent heat (62)强度量 intensive quantity (62)强度性质 intensive property (62)亲液溶胶 hydrophilic sol (62)氢电极 hydrogen electrodes (62)区域熔化zone melting (62)热 heat (62)热爆炸 heat explosion (62)热泵 heat pump (63)热功当量mechanical equivalent of heat (63)热函heat content (63)热化学thermochemistry (63)热化学方程thermochemical equation (63)热机 heat engine (63)热机效率 efficiency of heat engine (63)热力学 thermodynamics (63)热力学第二定律 the second law of thermodynamics (63)热力学第三定律 the third law of thermodynamics (63)热力学第一定律 the first law of thermodynamics (63)热力学基本方程 fundamental equation of thermodynamics (64)热力学几率 thermodynamic probability (64)热力学能 thermodynamic energy (64)热力学特性函数characteristic thermodynamic function (64)热力学温标thermodynamic scale of temperature (64)热力学温度thermodynamic temperature (64)热熵thermal entropy (64)热效应heat effect (64)熔点曲线 melting point curve (64)熔化热heat of fusion (64)溶胶 colloidal sol (65)溶解焓 dissolution enthalpy (65)溶液 solution (65)溶胀 swelling (65)乳化剂 emulsifier (65)乳状液 emulsion (65)润湿 wetting (65)润湿角 wetting angle (65)萨克尔-泰特洛德方程 Sackur-Tetrode equation (66)三相点 triple point (66)三相平衡线 triple-phase line (66)熵 entropy (66)熵判据 entropy criterion (66)熵增原理 principle of entropy increase (66)渗透压 osmotic pressure (66)渗析法 dialytic process (67)生成反应 formation reaction (67)升华热heat of sublimation (67)实际气体 real gas (67)舒尔采-哈迪规则 Schulze-Hardy rule (67)松驰力relaxation force (67)松驰时间time of relaxation (67)速度常数reaction rate constant (67)速率方程rate equations (67)速率控制步骤rate determining step (68)塔费尔公式 Tafel equation (68)态-态反应 state-state reactions (68)唐南平衡 Donnan equilibrium (68)淌度 mobility (68)特鲁顿规则 Trouton rule (68)特性粘度 intrinsic viscosity (68)体积功 volume work (68)统计权重 statistical weight (68)统计热力学 statistic thermodynamics (68)统计熵 statistic entropy (68)途径 path (68)途径函数 path function (69)外扩散控制 external diffusion control (69)完美晶体 perfect crystalline (69)完全气体 perfect gas (69)微观状态 microstate (69)微态 microstate (69)韦斯顿标准电池 Weston standard battery (69)维恩效应Wien effect (69)维里方程 virial equation (69)维里系数 virial coefficient (69)稳流过程 steady flow process (69)稳态近似法 stationary state approximation (69)无热溶液athermal solution (70)无限稀溶液 solutions in the limit of extreme dilution (70)物理化学 Physical Chemistry (70)物理吸附 physisorptions (70)吸附 adsorption (70)吸附等量线 adsorption isostere (70)吸附等温线 adsorption isotherm (70)吸附等压线 adsorption isobar (70)吸附剂 adsorbent (70)吸附量 extent of adsorption (70)吸附热 heat of adsorption (70)吸附质 adsorbate (70)析出电势 evolution or deposition potential (71)稀溶液的依数性 colligative properties of dilute solutions (71)稀释焓 dilution enthalpy (71)系统 system (71)系统点 system point (71)系统的环境 environment of system (71)相 phase (71)相变 phase change (71)相变焓 enthalpy of phase change (71)相变化 phase change (71)相变热 heat of phase change (71)相点 phase point (71)相对挥发度relative volatility (72)相对粘度 relative viscosity (72)相律 phase rule (72)相平衡热容heat capacity in phase equilibrium (72)相图 phase diagram (72)相倚子系统 system of dependent particles (72)悬浮液 suspension (72)循环过程 cyclic process (72)压力商 pressure quotient (72)压缩因子 compressibility factor (73)压缩因子图 diagram of compressibility factor (73)亚稳状态 metastable state (73)盐桥 salt bridge (73)盐析 salting out (73)阳极 anode (73)杨氏方程 Young’s equation (73)液体接界电势 liquid junction potential (73)液相线 liquid phase lines (73)一级反应first order reaction (73)一级相变first order phase change (74)依时计量学反应 time dependent stoichiometric reactions (74)逸度 fugacity (74)逸度系数 coefficient of fugacity (74)阴极 cathode (75)荧光 fluorescence (75)永动机 perpetual motion machine (75)永久气体 Permanent gas (75)有效能 available energy (75)原电池 primary cell (75)原盐效应 salt effect (75)增比粘度 specific viscosity (75)憎液溶胶 lyophobic sol (75)沾湿 adhesional wetting (75)沾湿功 the work of adhesional wetting (75)真溶液 true solution (76)真实电解质real electrolyte (76)真实气体 real gas (76)真实迁移数true transference number (76)振动配分函数 partition function of vibration (76)振动特征温度 characteristic temperature of vibration (76)蒸气压下降 depression of vapor pressure (76)正常沸点 normal point (76)正吸附 positive adsorption (76)支链反应 branched chain reactions (76)直链反应 straight chain reactions (77)指前因子 pre-exponential factor (77)质量作用定律mass action law (77)制冷系数coefficient of refrigeration (77)中和热heat of neutralization (77)轴功 shaft work (77)转动配分函数 partition function of rotation (77)转动特征温度 characteristic temperature of vibration (78)转化率 convert ratio (78)转化温度conversion temperature (78)状态 state (78)状态方程 state equation (78)状态分布 state distribution (78)状态函数 state function (78)准静态过程quasi-static process (78)准一级反应 pseudo first order reaction (78)自动催化作用 auto-catalysis (78)自由度 degree of freedom (78)自由度数 number of degree of freedom (79)自由焓free enthalpy (79)自由能free energy (79)自由膨胀free expansion (79)组分数 component number (79)最低恒沸点 lower azeotropic point (79)最高恒沸点 upper azeotropic point (79)最佳反应温度 optimal reaction temperature (79)最可几分布 most probable distribution (80)最可几速率 most propable speed (80)概念及术语BET公式BET formula1938年布鲁瑙尔(Brunauer)、埃米特(Emmett)和特勒(Teller)三人在兰格缪尔单分子层吸附理论的基础上提出多分子层吸附理论。
航空专用名词缩略语

航空专⽤名词缩略语A&E Architectural and Engineering 建筑和⼯程A-BPSK Aviation-Biphase Shift Keying 航空两相相移键控A-QPSK Aviation-Quadriphase Shift Keying 航空四相相移键控A/G Air-to-Ground 空对地AAC Aeronautical Administrative Communication 航空⾏政通信AAC Airline Administrative Control 航空公司⾏政管理AAC Aeronautical Advisory Council 航空咨询委员会AAIM Aircraft Autonomous Integrity Monitor 飞机⾃治完好性监控AARS Automatic Altitude Reporting System ⾃动⾼度报告系统AAS Advanced Automated System 先进⾃动化系统AAS Aeronautical Advisory Station 航空咨询电台AAS Airborne Antenna System 机载天线系统AASR Airport and Airways Surveillance Radar 机场和航路监视雷达AATS Advanced Automation Training System 先进⾃动化培训系统AAD Assigned Altitude Deviation 指定⾼度偏差ABE ARINC 429 Bus Emulator ARINC 429 总线仿真器ABI Advanced Boundary Information Message ⾼级边界信息报⽂ABPS airborne beacon processing system 机载信标信息处理系统ABPSK Aeronautical Binary Phase Shift Keying 航空双相移键控A/C Aircraft 飞机AC Advisory Circular 咨询通报ACA Aeronautical Communication Architecture 航空通信结构ACARS Aircraft Communication Addressing and Reporting System 飞机通信寻址和报告系统ACARS ARINC Communications Addressing and Reporting System ARINC通信寻址和报告系统ACAS Airborne Collision Avoidance System 机载(避)防撞系统ACC Area Control Center 区域管制中⼼ACCC Area Control Computer Complex 区域管制计算机⽹ACCTS Aviation Coordinating Committee for Telecommunication Services 航空电信服务协调委员会ACF Area Control Facility 区域管制设施ACID Aircraft Identification 飞⾏器识别标志ACK Acknowledgment 认可ACLS Automatic Control and Landing System ⾃动控制和着陆系统ACMF Airplane Condition Monitoring Function 飞机状态监视功能ACMS Aircraft Condition Monitoring System 飞机状态监控系统ACNSS Advanced Communication/Naviga- tion/Surveillance system 先进的通信导航监视系统ACS aircraft call sign 飞机呼号ACS Attitude Control System 姿态控制系统ACSE Access Control and Signaling Equipment 接续控制与信令设备ACSG Aeronautical Communication Sub-Group 航空通信分组ACU Aerodrome Control Unit 机场控制单位(室)ACU Autopilot Control Unit ⾃动驾驶控制单元ACU Antenna Control Unit 天线控制组件ADA computer programming language ⼀种计算机编程语⾔ADAS AWOS Data Acquisition System ⾃动⽓象观察系统数据采集系统ADC airborne data computer 机载数据计算机ADDI Automated Digital Data Interchange ⾃动化数字数据交换ADEP Airport of Departure 起飞机场ADES Airport of Destination ⽬标机场ADFE Automatic Direction-Finding Equipment ⾃动定向仪设备ADI Aggregate Demand Indicator 综合指令指⽰器ADI Attitude Direction Indicator 姿态⽅向指⽰器ADIRS Air Data Inertial Reference System ⼤⽓数据惯性基准系统ADIRU Air Data Inertial Reference Unit ⼤⽓数据惯性基准单元ADIS-B Automatic Data Interchange System, service B ⾃动数据交换系统,B类服务ADLOC ARINC Data Link Operations Center ARINC数据链运⾏中⼼ADLP Airborne Data Link Processor 机载数据链处理器ADM Air Data Module ⼤⽓数据模块ADMS Airline Data Management System 航空公司数据管理系统ADNS ARINC Data Network Service ARINC数据⽹服务ADP Automated Data Processing ⾃动数据处理ADPCM Adaptive Differential Pulse Code Modulation ⾃适应差分脉码调制ADS Automatic Dependent Surveillance ⾃动相关监视ADS Air Data System ⼤⽓数据系统ADS Satellite ADS via AMSS ⼀种通过航空移动卫星系统运⾏的ADSADS-I ADS capability provided by the combination of FANS 1 avionics and ground automation 采⽤FANS-I 机载设备和地⾯⾃动化系统组合提供的ADS能⼒ADS-A Automatic Dependent Surveillance Addressing 选址式⾃动相关监视ADS-B Automatic Dependent Surveillance Broadcast Mode ⼴播式⾃动相关监视ADS-B Mode S ADS-Broadcast based on Mode S Squitter 基于S模式应答机随机⾃发报告的⼴播式⾃动相关监视ADS-B VHF ADS-Broadcast based on VHF datalink 基于VHF数据链的⾃动化相关监视⼴播ADSEL Address Selective 寻址ADSF Automatic Dependent Surveillance Function ⾃动相关监视功能ADSP (ICAO) Automatic Dependent Surveillance Panel (国际民航组织)⾃动相关监视专家组ADSU ADS Study Group (ICAO) (国际民航组织)⾃动相关监视研究组ADSU Automatic Dependent Surveillance Unit or ADS Unit ⾃动相关监视单元AECU Audio Electronic Control Unit ⾳频电⼦控制单元AEEC Airlines Electronic Engineering Committee 航空公司电⼦⼯程委员会AEL Aircraft Equipment List 飞机装备清单AERA Automated En Route Air Traffic ⾃动化航路空中交通管制AES Aircraft Earth Station 飞机地球站AF Airway Facilities 航路设施AFC ATC Frequency Change service 空中交通管制改(换)频服务AFCAS Automatic Flight Control Augmentation System ⾃动飞⾏控制增强系统AFCS Automatic Flight Control System ⾃动飞⾏控制系统AFDC Autopilot Flight Director Computer ⾃动驾驶飞⾏指⽰计算机AFDS Autopilot Flight Director System ⾃动驾驶飞⾏指⽰系统AFEPS ACARS Front End Processing System ACARS前端处理系统AFIS Aerodrome Flight Information Service 机场航⾏情报服务AFIS Airborne Flight Information System 机载飞⾏情报系统AFL Actual Flight Level 实际飞⾏⾼度AFLS Automated Flight Inspection System ⾃动飞⾏检查系统AFN ATS Facilities Notification 空中交通服务设备通告AFS Aeronautical Fixed Service 航空固定通信业务AFSS Automated Flight Service Station ⾃动化飞⾏服务站AFTN Aeronautical Fixed Telecommunication Network 航空固定电信⽹AFTRCC Aerospace and Flight Test Radio Coordinating Council 宇航和飞⾏测试⽆线电协调委员会AGCS Air Ground Communication System 空地通信系统AGDLS Air-Ground Data Link System 空地数据链系统AGL Above Ground Level 离地⾼度AGMCS Airport Ground Movement Control System 机场地⾯交通管制系统AGSS ACARS Ground System Standard(AEEC) ACARS 地⾯系统标准(AEEC)AGSVP A/G Service Planning 空地(通信)业务规划AGVS Air Ground VHF Subnetwork 空地VHF⼦⽹AI Artificial Intelligence ⼈⼯智能AI Alternative Interrogator 可选择询问器AI Aeronautical Information 航空情报AIC Aeronautical Information Circular 航空情报通报AIDC ATC Interfacility Data Communications 空中交通管制设施间数据通信AIDS airborne integrated data system 机载综合数据系统AIDS airborne integrated display system 机载综合显⽰系统AIED Aeronautical Industry Engineering and Development 航空⼯业⼯程和开发AIEE American Institute Electrical Engineers 美国电⽓⼯程师学会AIEM Airlines International Electronic Meeting 航空公司国际电⼦会议AILAS Automatic Instrument Landing Approach System ⾃动仪表着陆进近系统AIM-FANS Airbus Interoperable Modular FANS 空中客车FANS可运⾏模块(空中客车公司设计的⼀种FANS系统结构模块)AIMS Aircraft Information Management System 飞机信息管理系统AIP Aeronautical Information Publication 航⾏资料汇编AIP Airport Improvement Program 航空港改进计划AIRCOM digital air/ground communications services provided by SITA 由SITA提供的数字空地通信服务AIRAC Aeronautical Information Regulation And Control 航⾏资料规划和管制,定期制航⾏通告AIREP Air Report 空中报告AIRMET Airmen's Meteorological information 飞⾏员的⽓象资料AIS Aeronautical Information Service(s) 航空情报服务AKN Acknowledgment 认可A/L Autoland ⾃动着陆AL Alerting Service 告警服务ALC Asynchronous Link Control 异步链路控制ALS Automatic Landing System ⾃动着陆系统ALSF Approach Light System with Sequenced Flashing lights 顺序闪光的进近灯光系统ALSIP Approach Light System Improvement Program 进近灯光系统改进计划ALT Airborne Link Terminal 机载链路终端ALT Altitude ⾼度ALTS Altitude Select ⾼度选择AM Amplitude Modulation 调幅AMC Avionics Maintenance Conference 机载电⼦设备维护维修⼤会AME Amplitude Modulation Equivalent 等效调幅AMCP (ICAO) Aeronautical Mobile Communications Panel (国际民航组织)航空移动通信专家组AMJ Advisory Material-Joint 联合咨询资料AMP ARINC Message Processor(ADNS) ARINC报⽂处理器AMS Aeronautical Mobile Service 航空移动服务AMSS Aeronautical Mobile-Satellite Service 航空移动卫星业务AMSSP (ICAO) Aeronautical Mobile-Satellite Service Panel (国际民航组织)航空移动卫星业务专家组AMTS Aeronautical Message Transfer Service 航空报⽂移交业务AMU Audio Management Unit 话⾳管理单元AMUX Audio Multiplexer ⾳频复⽤器A/N Alphanumeric 按字母顺序ANC ICAO Air Navigation Commission 国际民航组织航⾏委员会ANICS ALASKAN NAS Interfacility Communication System 阿拉斯加美国国家空域系统设施间通信系统ANLP ARINC Network Layer Protocol ARINC⽹络层规程ANP Air Navigation Plan 空中航⾏规划ANP Actual Navigation Performance 实际导航性能ANS Air Navigation System 空中航⾏系统ANS Area Navigation System 区域导航系统ANSI American National Standards Institute 美国国家标准学会AOA Aerodrome Owners Association 机场企业主协会AOC Aeronautical Operational Control 航空运营管理AOC Aerodrome obstacle chart 机场障碍物图AOC Aircraft Operational Center 飞⾏运⾏中⼼AOC Airline Operational Communications System 航空公司运营通信系统AOCI Airport Operators Council International 机场经营与国际协会AOP Aerodrome Operations 机场运营AOPA Aircraft Owners and Pilots Association 航空器企业主与驾驶员协会AOR Atlantic Ocean Region ⼤西洋区域AORE Atlantic Ocean Region East 东⼤西洋区域AORW Atlantic Ocean Region West 西⼤西洋区域A/P Autopilot ⾃动驾驶APANPIRG ASIA/PAC Air Navigation Planning and Implementation Regional Group 亚太地区航⾏规划和实施⼩组APC Autopilot Computer ⾃动驾驶计算机APC Aeronautical Passenger Communications 航空旅客通信APC Aeronautical Public Correspondence 航空公⽤通信APIRG AFI Planning and Implementation Regional Group ⾮洲地区规划和实施⼩组APIWP Approach Intercept Waypoint 进近切⼊点APL Abbreviated Flight Plan 简略飞⾏计划APP Approach Control 进近管制APP(APPR) Approach 进近APS Airway Planning Standard 航路设计标准APSR Airport Surveillance Radar 机场监视雷达AQP Avionics Qualification Policy 机载电⼦设备资格A-QPSK Aeronautical Quadrature Phase Shift Keying 航空四相相移键控AR Arrival Route 到达航路ARCW ADS Route Conformance Warning ⾃动相关监视航路⼀致性警告ARF Airport Reservation Function 航空港预定功能ARINC Aeronautical Radio Inc. 航空⽆线电公司ARP Aerodrome reference point 机场基准点ARR Arrival message 到达信息ARS Automated Radar Summary chart ⾃动雷达综合图ARSA Airport Radar Service Area 机场雷达服务区ARSR Air Route Surveillance Radar 航路监视雷达ARTAS ATC Radar Tracker and Server 空中交通管制雷达跟踪和服务器ARTCCS Air Route Traffic Control Centers 航路交通管制中⼼ARTS Automated Radar Terminal System ⾃动化雷达终端系统AS Autonomy Sensor ⾃主式机载传感器ASCPC Air Supply and Cabin Pressure Controllers 空⽓供给和机舱压⼒控制器ASCII America standard Code for Information Interchange 美国信息交换标准码ASD Aircraft Situation Display 飞机状态显⽰器ASDE Airport Surface Detection Equipment 机场场⾯探测设备ASDL Aeronautical Satellite Data Link 航空卫星数据链ASECNA Agency for the Security of Aerial Navigation in Africa and Madagascar ⾮洲和马达加斯加航⾏安全局ASG ARINC Signal Gateway ARINC信号⽹关ASI Avionics System Integration 航空电⼦仪表系统集成ASK Amplitude Shift Keying 振幅移位键控AM(ASM) Airspace Management 空域管理A-SMGCS Advanced Surface Movement Guidance and Control System 先进场⾯活动引导和控制系统ASOS Automated Surface Observing System ⾃动场⾯观测系统ASP Arrival Sequencing Program 进场顺序计划ASP Aeronautical communication Service Processor 航空通信业务处理器ASPP (ICAO) Aeronautical Fixed Service (AFS) System Planning for Data Interchange Panel (国际民航组织)航空固定电信业务系统数据交换规划专家组ASR Airport Surveillance Radar 机场监视雷达ASRS Aviation Safety Reporting System 航空安全报告系统ASTERIX All- purpose Structured Eurocontrol Radar Information ExchangeASTA Airport Surface Traffic Automation 机场场⾯交通⾃动化A/T Auto throttlt ⾃动油门AT Air Traffic 空中交通AT&T American Telephone and Telegraph 美国电话电报公司ATA Air Transport Association of American 美国航空运输协会ATAG Air Transport Action Group 航空运输⾏动⼩组ATAR Automatic Air Reporting 航空⾃动报告ATAR Automatic Air Reporting Study Group 航空⾃动报告研究组ATC Air Traffic Control 空中交通管制ATCC Air Traffic Control Center 空中交通管制中⼼ATCBI Air Traffic Control Beacon Interrogator 空中交通管制信标询问器ATCComm Air Traffic Control Communications System(Hardware & Software) 空中交通管制通信系统(硬件和软件) ATCRBS Air Traffic Control Radar Beacon System 空中交通管制雷达信标系统ATCS Air Traffic Control Services 空中交通管制服务ATCT Airport Traffic Control Tower 机场交通管制塔台ATCU ATC unit 空中交通管制单位ATD Along-Track Distance 沿航线距离ATE Automatic Test Equipment ⾃动测试设备ATFM Air Traffic Flow Management 空中交通流量管理ATIS Air Traffic Information Service 空中交通信息服务ATIS Airport Terminal Information Service 机场终端信息服务ATIS Automated(automatic) Terminal Information Service ⾃动终端情报服务ATM Air Traffic Management 空中交通管理ATN Aeronautical Telecommunications Network 航空电信⽹ATNP (ICAO)Aeronautical Telecommunication Network Panel (国际民航组织)航空电信⽹专家组ATO Actual Time Over 实际经过时间ATRK Along-Track Error 沿航线误差ATS Air Traffic Services 空中交通服务ATSC Air Traffic Services Communication 空中交通服务通信ATT Attitude 姿态AUSSAT Australian Satellite 澳⼤利亚卫星AUTODIN Automated Digital Network ⾃动化数字⽹络AUTOVON Automatic Voice Network ⾃动化话⾳⽹络AUX Auxiliary 辅助AVOL Aerodrome Visibility Operational Level 机场能见度运⾏等级AVPAC Aviation VHF Packet Communications 航空甚⾼频分组通信AVS Aviation Standards 航空标准AWANS Aviation Weather And NOTAM System 航空⽓象和航⾏通告系统AWOP (ICAO) All Weather Operations Panel (国际民航组织)全天候运⾏专家组AWOS Automated Weather Observing System ⾃动化⽓象观测系统AWP Aviation Weather Processor 航空⽓象处理器AWS Aviation Weather Service 航空⽓象服务AZ Azimuth transmitter ⽅位台BBARO Barometric ⽓压BAZ Back Azimuth 后⽅位,背航道BER Basic Encoding Rules 基本编码规则BER Bit Error Rate 误码率BIT Built-In-Test 机内测试BITE Built-In-Test Equipment 机内测试设备BOP Bit Oriented Protocol ⾯向位的协议BPS bits per second 每秒传送位数;每秒⽐特数BPSK Biphase Shift Keying 两相相移键控BRITE Bright Radar Indicator Tower Equipment 塔台⾼亮度雷达显⽰设备BRL Bearing Range Line ⽅位距离线BSU Beam Steering Unit 天线⽅位控制组件BUEC Backup Emergency Communications 备⽤紧急通信C 通信C-Band Approx. 5,000MHz C波段C/A (CA) Code Course Acquisition Code 粗获码(民⽤的)C/I Carrier-to-Interference Ratio 信号⼲扰⽐C/N Carrier-to-Noise Ratio 信噪⽐CA Conflict Alert 冲突告警CA GPS Course- Acquisition Code 粗捕获码(民⽤码)CA/MSAW Conflict Alert/Minimum Safe Altitude Warning 冲突告警/最低安全⾼度警告CAA Civil Aviation Administration, Civil Aeronautical Authority, Civil Aviation Authority 民航局CAAC General Administration of Civil Aviation of China 中国民⽤航空总局CAASD Center for Advanced Aviation System Development(The MITRE Corporation) (MITRE公司)⾼级航⾏系统开发中⼼CAB Civil Aeronautical Bureau 民航局CARF Central Altitude Reservation Function 中央飞⾏⾼度保留功能CARs Civil Air Regulations 民⽤航空规则CASITAF CNS/ATM implementation task force 新航⾏系统实施特别⼯作组CAT Category 仪表着陆等级CATⅠ Category Ⅰ⼀类仪表着陆CATⅡ Category Ⅱ⼆类仪表着陆CAT Ⅲa Category Ⅲa 三类a级仪表着陆CAT Ⅲb Category Ⅲb 三类b级仪表着陆CAT Ⅲc Category Ⅲc 三类c级仪表着陆CATC Civil Aviation Training Center 民航培训中⼼CATMAC Co-operative Air Traffic Management Concept 空中交通管理合作⽅案CBA Cost/Benefit Analysis 成本效益分析C-BAND The frequency range between 4000 and 8000MHz 4000到8000MHz频段CBI Computer Based Instruction 计算机基本指令CBT Computer-Based Training 计算机辅助训练CC Connection Confirm 联接确认CCA Continental Control Area ⼤陆管制区CCC 蜂窝式CNS概念CCD Consolidated Cab Display 综合机舱显⽰器CCIR International Radio Consultative Committee 国际⽆线电咨询委员会CCITT International Telegraph and Telephone Consultative Committee 国际电报电话咨询委员会CCP Contingency Command Post 应急指挥站CCWS Common controller workstation 通⽤管制员⼯作站CD Common Digitizer 通⽤数字化仪设备CDC Computer Display Channel 计算机显⽰通道CDI Course Deviation Indicator 偏航指⽰器CDM Code division multiplex 码分复⽤CDM Continuous Delta Modulation 连续增量调制CDMA Code Division Multiple Access 码分多址CDT Controlled Departure Times 管制离场时间CDTI Cockpit Display of Traffic Information 驾驶舱交通信息显⽰CDU Control Display Unit 控制显⽰组件CEP Circular error probability 圆概率误差CERAC Combined Center Radar Approach Control 雷达进近管制联合中⼼CFCC Central Flow Control Computer 中央流量管制计算机CFCF Central Flow Control Facility 中央流量管制设施(功能)CFDPS Compact Flight Data Processing System ⼩型飞⾏数据处理系统CFWP Central Flow Weather Processor 中央流量⽓象处理机CFWSU Central Flow Weather Service Unit 中央流量⽓象服务单元(组件)CHI Computer Human Interface 机⼈接⼝CIDIN Common ICAO Data Interchange Network 国际民航组织公⽤数据交换⽹CIS Cooperative independent surveillance 合作式独⽴监视CLAM Cleared Level Adherence Monitoring 放⾏⾼度保持监视CLB Climb 爬升CLK Clock 时钟CLNP Connectionless Network Protocol ⽆连接⽹络规程(协议)CLR Clear 清除CMC Central Maintenance Computer 中央维护计算机CMD Command 命令CMS Cabin Management System 机舱管理系统CMU Communications Management Unit 通信管理单元CNDB Customized Navigation Database ⽤户导航数据库CNS Consolidated NOTAM System 综合航⾏通告系统CNS/ATM Communication Navigation, Surveillance/Air Traffic Management 通信导航监视/空中交通管理CODEC Coder/Decoder 编码器/解码器COM/MET/OPS Communication/ Meteorology/ Operations 通信/⽓象/运⾏COMLO Compass Locator 罗盘定位器;罗盘⽰位信标COMM Communication 通信COMP Compressor 压缩器COMSEC Communications Security 通信保安CON Continuous 连续CONUS Continental, Contiguous, or Conterminous United States 美国⼤陆本部(四⼗⼋州)COP Change Over Point 转换点COP Character Oriented Protocol ⾯向字符协议COTS Commercial Off-the-Shelf 商业货架产品供应CPDLC Controller Pilot Data Link Communications 管制员驾驶员数据链通信CPFSK Continuous Phase Frequency Shift Keying 连续相位频移键控CR Connection Request 联接申请CRA Conflict Resolution Advisory 冲突解脱咨询CRC Cyclic Redundant Check 循环冗余校验CRCO Central Route Charges Office 中央航路收征费办公室CRM C Reference Model C参考模式CRM Collision Risk Modeling 碰撞危险模型CRM Crew Resource Management 机组⼈员安排CRT Cathode Ray Tube 阴极射线管CRZ Cruise 巡航CSA Standard Accurate Channel 标准精度通道CSE Course Setting Error 航线设定误差CSMA Carrier Sense Multiple Access (datalink protocol) 载波侦听多址访问C/SOIT Communication/ Surveillance Operational Implementation Team 通信监视运⾏实施⼩组(美国)CTA Calculated Time of Arrival 计算到达时间CTA Control Area 管制区CTAS Central Tracon Automation System 中央终端雷达进近管制⾃动系统CTL Control 控制CTMO Central traffic Management Organization 中央交通流量管理组织CTMO Centralized Traffic Management Organization 中央交通管理组织CTOL Conventional Take Off and Landing 常规起飞着陆CTR Control zone 管制地带CTS Control Tracking Station 控制跟踪站CU Control Unit 控制单元C§W Control and Warning 控制和告警CW Carrier Wave 载波CWI Continuous Wave Interference 连续波⼲扰CWP Central Weather Processor 中央⽓象处理器CWSU Center Weather Service Unit 中央⽓象服务单元DD/A Digital-to-Analog 数/模转换DABS Discrete Addressable Beacon System 离散寻址信标系统DADC Digital Air Data Computer 数字⼤⽓数据计算机D-ATIS Digital Automatic Terminal Information Service 数字⾃动终端信息服务DA Decision Addressing beacon system 决断寻址信标系统DA Demand Assignment 按需分配DA/H Decision Altitude(Height) 决断⾼度DARC Direct Access Radar Channel 直接存取雷达信道DARP Dynamic Air Route Planning 动态航线计划DARPS Dynamic Aircraft (Air) Route Planning Study 动态飞机航线计划研究DC Departure Clearance 离场放⾏许可DC Direct Current 直流(电)DCC Display Channel Complex 显⽰通道组合DCIU Data Control Interface Unit 数据控制接⼝单元DCL Departure Clearance Delivery 起飞许可传送DCPC Direct Controller Pilot Communication 管制员驾驶员直接通信DES Data Encryption Standard 数据加密标准DF Direction Finder 测向器DFCS Digital Flight Control System 数字飞⾏控制系统DFDAU Digital Flight Data Acquisition Unit 数字飞⾏数据采集单元DGCA Director-General Civil Aviation 民航局长DGNSS Differential Global Navigation Satellite System 差分全球导航卫星系统DGPS Differential Global Positioning System 差分全球定位系统DH Decision Height 决断⾼度DIP Diplexer 双⼯器DL Data Link 数据链DLAC Data Link Applications Coding 数据链应⽤编码DLAS Differential GNSS Instrument Approach System 差分GNSS仪表进近系统DLK data link 数据链DLORT FAA Data Link Operational Requirements Team FAA数据链运⾏要求⼯作组DMAP ICAO Data Link Mobile Applications Panel(proposed) 国际民航组织数据链移动应⽤专家组(建议)DME Distance Measuring Equipment 测距设备DME/N Distance Measuring Equipment/Normal 标准测距设备DME/P Distance Measuring Equipment/Precision 精密测距设备DMU Data Management Unit 数据管理单元DO(DOC) Document 记录(⽂件)DOD Department of Defense (美国)国防部DOP Dilution of Precision 精度扩散因⼦DOT Department of Transportation (美国)运输部DOTS Dynamic Ocean Tracking System 动态海洋跟踪系统DP Disconnect Request 分离拆线请求DPF Data Processing Function 数据处理功能D8PSK Differential Eight-Phase Shift Keying 差分8相移键控DPSK Differential Phase Shift Keying 差分相移键控DRMS Distance Root Mean Square 距离均⽅根值DRN Document Release Notice ⽂件发放通告DSB-AM Double Sideband Amplitude 双边带调幅DSDU Data Signal Display Unit 数据信号显⽰单元DSP Departure Sequencing Program 起飞排序计划;离港排序计划DT Data 数据DTE Data Terminal Equipment 数据终端设备DT&E Development Test and Evaluation 开发测试和评估DTF Data Test Facility 数据检测设备DTG 待飞距离DTN Data Transport Network 数据传输⽹络DUAT Direct User Access Terminal ⽤户直接存取终端DVOR Doppler Very high frequency Omni-directional Range 多普勒甚⾼频全向信标EEANPG European Air Navigation Planning Group 欧洲航⾏规划⼩组E-DARC Enhanced Direct Access Radar Channel 增强的直接存取雷达信道EARTS En route Automated Radar Tracking System 航路⾃动化雷达跟踪系统EASIE Enhanced ATM and Mode S Implementation in Europe 欧洲S模式和增强的空中交通管理实施项⽬EATCHIP European ATC Harmonization Implementation Program 欧洲空中交通管制协调实施计划EATMS European Air Traffic Management System 欧洲空中交通管理系统ECAC European Civil Aviation Conference 欧洲民航会议ECEF 地⼼地固坐标EDCT Estimated Departure Clearance Time 预计离港起飞放⾏时间EET Estimated Elapsed Time 预计经过时间EFAS En route Flight Advisory Service 航路飞⾏咨询服务EFAS Extended Final Approach Segment 扩展最后进近段EFIS Electronic Flight Instrument System 电⼦飞⾏仪表系统EFC Expect Further Clearance 预期进⼀步放⾏许可EFIS Electronic Flight Information System 电⼦飞⾏情报系统EGNOS European global navigation overlay system 欧洲全球导航重迭系统EHSI Electronic Horizontal Situation Indicator 电⼦平⾯状态显⽰器EIRP Equivalent Isotropic Radiate Power 等效各向同性辐射功率EISA Extended Industry Standard Architecture 扩展的⼯业标准结构EL Elevation Transmitter 仰⾓台ELOD En route sector Load 航路扇区负载管制飞机数量ELT Emergency Locator Transmitter 紧急⽰位发射机EMC Electromagnetic Compatibility 电磁兼容EMI Electromagnetic Interference 电磁⼲扰ENRI Electronic Navigation Research Institute (⽇本)电⼦导航研究所EOF Emergency Operations Facility 应急运⾏设施EPA Environmental Protection Agency 环境保护署ER Error 误差ERL Environmental Research Laboratories 环境研究实验室ERM En Route Metering 航路计量管制ERN Earth Referenced Navigation ⼤地参考导航ERP Effective Radiated Power 有效幅射功率ES End System 终端系统ESA European Space Agency 欧洲航天局ESCAN Electronic Scanning(radar antenna)ESMMC Enhanced SMMC 增强的系统维护监视台ESP En route Spacing Program 航路间隔计划EST Estimated message 预计信息ETA Estimated Time of Arrival 预计到达时间ETB Estimated Time of Boundary 预计边界时间ETD Estimated Time of Departure 预计离港时间ETG Enhanced Target Generator 增强的显⽰⽬标产⽣器ETN Estimated Time of Entry 预计进⼊时间ETO Estimated Time Over 预计飞越时间ETSI European Telecommunications Standards Institute 欧洲电信标准学会EU European Union 欧洲联盟EURATN European ATN 欧洲航空电信⽹EUROCAE European Organization for Civil Aviation Electronics 欧洲民⽤航空电⼦学组织EUROCONTROL European Organization for the Safety of Air Navigation 欧洲航⾏安全组织(欧安局)EVS Enhanced Vision System 增强视景系统EWAS En-route Weather Advisory Service 航路⽓象咨询服务FF&E Facilities and Equipment 设施和设备F,E&D Facilities, Engineering, and Development 设施、⼯程和开发FAA Federal Aviation Administration (美国)联邦航空局FAATC FAA Technical Center (美国)联邦航空局技术中⼼FAF Final Approach Fix 最终进近坐标FANS ICAO Future Air Navigation Systems (国际民航组织)未来航⾏系统FANS Special Committee on Future Air Navigation Systems 未来航⾏系统特别委员会FANS(Phase II) Special Committee for the Monitor- ing and Co-ordination of Develop- ment and Transition Planning for the Future Air Navigation System 未来航⾏系统监督、协调发展与过渡规划专门委员会FAR Federal Aviation Regulation 联邦航空条例FAS Final Approach Segment 最后进近段FASID Facilities And Services Implementation Document 设施和服务实施⽂件FCC Flight Communication Center 飞⾏通信中⼼FCC Federal Communication Commission 联邦通信委员会FCC Flight Control Computer 飞⾏控制计算机FDAU Flight Data Acquisition Unit 飞⾏数据收集单元FDDI Fiber Distributed Data Interface 光纤分布数据接⼝FDEP Flight Data Entry and Printout 飞⾏数据输⼊和输出FDI Fault Detection and Isolation 故障检测和隔离FDIO Flight Data Input/Output 飞⾏数据输⼊/输出FDM Frequency Division Multiplex 频分复⽤FDMA Frequency Division Multiple Access 频分多址FDP Flight Data Processor 飞⾏数据处理器FDPS Flight Data Processing System 飞⾏数据处理系统FDR Flight Data Recorder 飞⾏数据记录仪FEATS Future European ATS System Concept 未来欧洲空中交通服务系统⽅案FEATS ICAO Future European Air Traffic Management System 国际民航组织未来欧洲空中交通管理系统FEC Forward Error Correction 前向纠错FGC Flight Guidance Computer 飞⾏引导计算机FGCC Federal Geodetic Control Committee 联邦⼤地测量管理委员会FI Flight Inspection 飞机校验FIC Flight Information Center 飞⾏信息中⼼FIFO First In-First Out 先⼊先出FIFO Flight Inspection Field Office 飞⾏检查现场办事处FIR Flight Information Region 飞⾏情报区FIS Flight Information Services 飞⾏情报服务FISA Automatic Flight Information Service ⾃动飞⾏信息服务FL Flight Level 飞⾏⾼度层FLIR Forward Looking Infra-red Detection 前视红外线探测FM Frequency Modulation 调频FMC Flight Management Computer 飞⾏管理计算机FMEA Failure Mode Effects Analysis 故障模式效果分析FMS Flight Management System 飞⾏管理系统FMS Frequency Management System 频率管理系统FMSG Frequency Management Study Group 频率管理研究组FMU Flight Management Unit 飞⾏管理组件FMU Flow Management Unit 流量管理单元FOC Full Operation Capability 全运⾏能⼒FOM Figure of Merit 性能指数FPA Flight Path Angle 航迹倾⾓FPD Flight Plan Data 飞⾏计划数据FPS Military Primary Radar 军⽤⼀次雷达FREQ Frequency 频率FRP Federal Radio navigation Plan 联邦⽆线电导航计划(美国)FS Functional Statement 功能描述FSAS Flight Service Automation System 飞⾏服务⾃动化系统FSDPS Flight Service Data Processing System 飞⾏服务数据处理系统FSK Frequency Shift Keying 频移键控FSP Flight Strip Printer 飞⾏进程单打印机FSS Flight Service Station 飞⾏服务站FSTN Federal Security Telephone Network 联邦政府保安电话⽹络FT Functional Test 功能测试FTE Flight Technical Error 飞⾏技术误差FY Fiscal Year 财政年度; 会计年度GGA General Aviation 通⽤航空GA Ground annta 地⾯天线Gatelink Datalink for packed aircraft ⽹关数据链路GADS Generic Aircraft Display System 通⽤航空器显⽰系统GAIT Ground-based Augmentation and Integrity Technique 陆基增强和完好性技术GAO Government Accounting Office (联邦)政府会计署GBA Geostationary broadcast area 静⽌卫星⼴播区域GCAS Ground Collision Avoidance System 地⾯防撞系统GCS Ground Controlled Approach 地⾯控制系统GDLP Ground Data Link Processor 地⾯数据链处理器GDOP Geometic Dilution of Position 位置⼏何扩散因⼦GDOP Geometry Dilution of Precision 精度⼏何扩散因⼦GEO Geostationary 静地的GEO Geostationary Earth Orbit 相对地球静⽌轨道静⽌卫星GES Ground Earth Station 地⾯地球站GFE Government-Furnished Equipment 政府提供的设备GHz Giga hertz 千兆赫兹GIB GNSS integrity broadcast 全球导航卫星系统完好性数据⼴播GIC GNSS Integrity Channel 全球卫星导航系统完好性通道GICB Ground-initiated Comm-B 地⾯启动的B类通信GIRU Ground Interrogator Receiver Unit 地⾯应答机接收单元GIS Geographical Information System 地理信息系统GLONASS Global Orbit Navigation Satellite System 全球轨道导航卫星系统(俄罗斯)GLS GPS Landing System GPS着陆系统GM Guidance Material 指导材料GMC Ground Movement Control 地⾯活动管制GMSK Gaussian Minimum Shift KeyingGMT Greenwich Mean Time 格林威治时间GNAS General NAS 综合国家空域系统GND Ground 地GNE Gross Navigational Error 总导航误差GNR Global Navigation Receiver 全球导航接收机GNSS Global Navigation Satellite System 全球导航卫星系统GNSSP ICAO Global Navigation Satellite Systems Panel 国际民航组织全球卫星导航系统专家组GPSSU Global Positioning System Sensor Unit 全球定位系统(GPS)传感器组件GOES Geostationary Operational Environmental Satellite 静地运⾏环境卫星GOS Grade of Service 服务等级GOSEP Government Open Systems Interconnection Profile 政府开放系统互联结构GOSIP Government Open systems Implementation Profile 政府开放系统实施结构GP Glide-Path 下滑道GPIP Glide-Path Intercept Point 下滑道截获点GPIWP Glide Path Intercept Waypoint 滑⾏道切⼊点GPO/GPI General Purpose Output/General Purpose Input 通⽤输出/通⽤输⼊GPS Global Positioning System 全球定位系统GPWS Ground Proximity Warming System 近地告警系统GREPECAS Caribean/South American Planning and Implementation Regional Group 加勒⽐/南美洲计划和实施区域⼩组GRS Ground-Reference Station 地⾯基准站GRS80 Geodetic-Reference System-80 ⼤地基准系统-80GS(G/S) Glide Slope 下滑坡度GS Ground Speed 地速GSA General Services Administration 综合服务管理局(联邦政府下属)GSL General Support Laboratory 综合保障实验室GSM Global System (or Mobile) Communication 全球通信系统GWS Graphic Weather Service 图形⽓象服务HH Homing radio beacon 归航⽆线电信标HARN High Accuracy Reference Network ⾼精度参考⽹HAT Height Above Touchdown ⾼于接地点的⾼度HCI Human Computer Interface ⼈机接⼝HDD Head Down Display 下视显⽰器HDG Heading 航向HDOP Horizontal Dilution Of Precision 精度⽔平扩散因⼦HEMP High Altitude Electromagnetic Pulse ⾼空电磁脉冲HEO High Elliptical Orbit ⾼椭圆率轨道HF High Frequency(3-30MHz) ⾼频HFDL High Frequency Data Link ⾼频数据链HGA High Gain Antenna ⾼增益天线HIRF High Intensity Radiated Fields ⾼强度辐射场HIWAS Hazardous In-flight Weather Advisory Service 飞⾏时遇危险天⽓的咨询服务HMI Human Machine Interface ⼈机接⼝HPA high power amplifier ⾼功率放⼤器HPF Horizontal Position Fix Error ⽔平位置坐标误差HSI Horizontal Situation Indicator ⽔平位置指⽰器HUD Head-up Display 平视显⽰仪HUI Head up DisplayHVAC Heating, Ventilating, And air Conditioning 加热,通风和空调Hybird GNSS/ILS Precision Approach/Landing based on combination of GNSS localizer and ILS glide path 基于GNSS航向和ILS下滑道组合的精密进近/着陆系统Hz Hertz 赫兹IIA5 International Alopabet 5 国际字母表第5号码IACA International Air Carrier Association 国际航空公司协会IACSP International Aeronautical Communication Service Provider 国际航空通信业务提供者IAF Initial Approach Fix 初始进近点(坐标)IAG International Association of Geodetical 国际测地协会IAIN International Association of Institutes of Navigation 国际导航学会联合会IAOPA International Council of Aircraft Owner and Pilot Associations 航空器企业主和驾驶员协会国际委员会IAP Instrument Approach Procedure 仪表进近程序IAR Intersection of Air Routes 航路交叉点IAS Indicated Air Speed 指⽰空速IASC Inter Area Speech Circuit 区域间话⾳线路IATA International Air Transport Association 国际航空运输协会IBAC International Business Aviation Council 国际商业航空委员会ICAO International Civil Aviation Organization 国际民航组织ICCAI(A) International Co-ordination Council of Aerospace Industries Associations 国际宇航⼯业联合会合作委员会。
中图法与科图法简表对照一览-河海大学图书馆
写在前面春回大地,万象更新,在这春意盎然的时节里,新一期《图书馆最新资源速递》又如期与您见面了。
根据广大读者的需求,今年我馆在购置中文期刊时,新增订了近200种,为了方便您查找,我们已编制了《河海大学图书馆2008年度馆藏中文期刊目录》,并分发给各单位。
同时,我们将这近200种新增订的中文期刊目录单独列出,编辑在本辑《图书馆最新资源速递》的最后,以节省您查找新刊的时间。
本期继续报道外文会议录信息,希望我们的外文会议录专集对您查找会议文献有所帮助。
《图书馆最新资源速递》编辑体例如下:1、整体按分类编排:由于我馆的中文期刊是按《中图法》分类,中外文图书及外文期刊是按《科图法》分类,而这两种分类法又不尽相同,故我们将这两种分类的大类进行比较,相对集中并于目录中体现,目的是使推介的每一学科的内容尽量集中,以便读者更方便的使用;2、每一大类的内容按最新中文期刊目录、最新外文期刊目录、中文图书提要、外文图书提要的顺序编排;3、每一种推介的文献都注明了我馆的馆藏地。
4、我们的联系方式是:读者服务部(西康校区):电话:83787308、83787307、83787302E-mail:zhongqz@ tsgxp@ tsgcbb@读者服务部(江宁校区):电话:83787648E-mail:tsgcm@本期责任编辑:中文期刊——梁军;中文图书——许平;外文期刊——余清芬;外文图书——杨小莉。
本期供稿人员:周冰杨小莉宋艺丁马大勇郑林吴丽娣刘忠锦邓鸣超杨露曦熊易胡玲玲吴立志王唏红封丽陆艳洪建河海大学图书馆读者服务部2008. 4.3目录20 社会科学(C 社会科学总论) (5)中文期刊 (5)27 经济、经济学(F 经济) (9)中文期刊 (9)中文图书 (16)31/34 政治、社会生活/法律、法学(D 政治、法律) (17)中文期刊 (17)中文图书 (22)37 文化、科学、教育、体育(G 文化、科学、教育、体育) (27)中文期刊 (27)41 语言、文字学(H语言、文字) (29)中文期刊 (29)50 自然科学(N 自然科学总论) (31)中文期刊 (31)51-54 数学/力学/物理学/化学(O 数理科学和化学) (33)中文期刊 (33)中文图书 (36)外文期刊 (36)55-56 天文学/地球科学(P 天文学、地球科学) (58)中文期刊 (58)外文期刊 (60)58 生物科学(Q 生物科学) (87)中文图书 (87)65 农业科学(S 农业科学) (88)中文期刊 (88)中文图书 (89)外文期刊 (90)71-86 技术科学(T/X 工业技术/环境科学、安全科学) (91)中文期刊 (91)中文图书 (104)外文期刊 (136)外文会议录 (195)河海大学图书馆2008年新增中文现刊馆藏目录 (253)20 社会科学(C 社会科学总论)中文期刊社会科学[月刊]=Jornal of Social Sciences/上海社会科学院.—10期,2007年.—上海:上海社会科学院《社会科学》编辑部,(200020).15.00元ISSN 0257-5833 CN 31-1112索书号:C/5 馆藏地:西康校区四楼本期目录内容新苏南模式与两新·组织党建运行机制——以江苏昆山市为实例…………………王世谊 (4) 政府在公民维权中的指导责任和接受监督……………………………………………汤啸天(16) 地方政府考核:双重委托人失效及其政策含义………………………………徐风华王俊杰(25) 泛长江三角洲:世界第六大都市圈未来“一体两翼·新格局…………………………张颊瀚(34) 税费改革后农村公共服务提供机制的比较研究——基于湖北与浙江农村的调查………………………………………………………………………………伏玉林符钢战(40) 论上海发展面临的虚拟经济膨胀问题…………………………………………………高炜宇(47) 社会情境理论:贫困现象的另一种解释…………………………………………………周怡(56) 浦东新郊区建设和人口城市化再推进研究……………………………………………孙嘉丰(63) 后形而上时代的“沟通主义法律观”——啜法律的沟通之维》代译序………………邓正来(69) 单位人格刑事责任沦纲……………………………………………………………………杜文(72) 沦行政行为的代表性…………………………………………………………樊明亚赖声利 (80) 对我国学前教育改革若干问题的文化观照……………………………………………华爱华(87) 《沦语》:孔子弟子博弈之成果——兼谈战国后期儒家八派之争及荀卿的态度……李露平(96) 中西和谐社会思想之异同:经济学说史的视角………………………………………钟祥财(105) 清末新政对民生问题的恶性操作与社会矛盾的激化…………………………………陆兴龙(115) 《月令》;农耕民族的人生模型……………………………………………………………薛富(123) 书生立武勋——湘军功成的内在因素…………………………………………………李志茗(134) 塞上海柴拉报势考略……………………………………………………………………褚晓琦(147) 墓惠与商道:近代上海慈善组织兴起的原因探析……………………………………汪华(154) 走向·间性哲学·的跨文化研究…………………………………………………………周宁(162) 空间,性别与认同——女性写作的·地理学·转向…………………………………陈惠芬(170)月西方理论和方法解析中国古代诗词——叶嘉莹中西诗学研究之阐释……………徐志啸(183)法商研究[双月刊]=Studies in LAW And Business/中南财经政法大学.—第1期,2008年.—武汉市:《法商研究》编辑部,(430073).18.00元ISSN 1672-0393 CN 42-1664/D索书号:C5/73 馆藏地:本部四楼本期目录内容“美国对华铜版纸案”述评——基于反补贴申诉的考察……………………李仲平李炼(3) 美国反补贴法适用探析——以对“非市场经济国家”的适用为考察对象…………徐泉(10) WTO法律体系下实施“双反”措施的合法性研究——由“美国对华铜版纸案”引发的思考………………………………………………………………………………………臧立(16)从立法中心主义转向司法中心主义?——关于几种“中心主义”研究范式的反思、延伸与比较……………………………………………………………………………………喻中(22) 转化型抢劫罪主体条件的实质解释——以相对刑事责任年龄人的刑事责任为视角………………………………………………………………………………………刘艳红(29) 论我国股权激励的本土创新——股权分置改革视野下的反思与重构………………官欣荣(42) 论以人为本的“人”……………………………………………………………………胡锦光(48) 限时刑法探究……………………………………………………………………………黄明儒(55) 农民土地产权资本化经营实现的法律保障……………………………………………李丽峰(61) 城市土地节约利用法律制度:现状、问题与对策……………………………………王文革(69) 论现行保证制度的局限及其完善——以成本收益分析为中心………………………许德风(78) 保护传统文化的政策目标论纲…………………………………………………………黄玉烨(86) 我国新能源与可再生能源立法之新思维………………………………………………杨解君(92) 美国监管影响分析制度述评……………………………………………………………马英娟(98) 论犯罪的相对性——从绝对理性到相对理性…………………………………………张建军(107) 基于信息的荐证广告之法律规制——以保健品广告为中心…………………………吴元元(113) 环境罚款数额设定的立法研究…………………………………………………………程雨燕(121) 委托调解若干问题研究——对四个基层人民法院委托调解的初步考察……………李浩(133) 中国法律史研究思路新探………………………………………………………………邓建鹏(141) 中国法学会商法学研究会2007年年会综述…………………………………………冯兴俊(147) 第十五届全国经济法理论研讨会综述…………………………………………………管斌(153)复印报刊资料·社会学[月刊]Sociology.—第2期,2008年.—北京:中国人民大学书报资料中心,(100086).10.00元ISSN 1001-344X CN 11-4250/C索书号:C91/3 馆藏地:本部四楼江宁二楼本期目录内容理论研究中国社会发展范式的转换:普遍性与特殊性……………………………………………刘新刚(3) 欧洲社会模式的反思与展望……………………………………………(英)安东尼·吉登斯(10) 分支学科自我行动与自主经营——理解中国人何以将自主经营当作其参与市场实践的首选方式……………汪和建(21) 声望危机下的学术群体——当代知识分子身份地位研究……………………………刘亚秋(37) 中国城市教育分层研究(1949-2003) …………………………………………………郝大海(51) 法律执行的社会学模式——对法律援助过程的法社会学分析………………王晓蓓郭星华(63) 社会发展系统打造农村现代职业体系的创新探索——武汉农村家园建设行动计划和实践的社会学分析之一……………………郑杭生(69) “活着的过去”和“未来的过去”——民俗制度变迁与新农村建设的社会学视野…………………………………杨敏(76) 社会问题解决社会问题的关键:协调好社会各群体之间的关系…………………………………李强(87) 环球视窗美国式的贫困与反贫困...........................................................................张锐(89) 索引 (92)英文目录 (96)领导科学[半月刊]=Leadership Science—第21期,2007年.—河南:领导科学杂志社编辑出版,(450002).3.80元ISSN1003-2606 CN41-1024/C索书号: C93/8 馆藏地:本部四楼江宁二楼本期目录内容领导科学界的首要政治任务…………………………………………………………本刊编辑部(1)学习贯彻十七大精神把思想和行动统一到党的十七大精神上来——在2007年度省领导与社科葬专家学者座谈会上的讲话…………………………………………………………………………………徐光春(4)新一届中央领导集体治国理政的新方略(上) …………………………………………姜平(9)理论前沿关于领导、发展、以人为本的关系解读…………………………………………………王伟凯(ll)领导方法有效解决集体上访问题的思考与实践…………………………………………………陈丰林(14)引导信访户从“上访路”走上“致富路”………………………………………………邱金义(16)增强班子合力关键要合理分工…………………………………………………………枣甘(13)高校党建工作进网络的探索…………………………………………………张进超詹爱琴(17)市县领导欠发达地区构建和谐社会的着力点……………………………………………………丁善余(20)拓展农业发展思路的五种渠道…………………………………………………………盛高攀(22)乡镇领导推进乡镇党委和谐班子建设的途径……………………………………………………王晓宏(23)乡镇党委如何统揽工作全局……………………………………………………………刘久正(25)职工论坛建立体现科学发展观要求的干部政绩考核机制………………………………………盛克勤(30)组织部门信访工作机制探索……………………………………………………………钟群妹(26)用人之道有效规范干部选任初始提名工作……………………………………………李明辉韩振松(32)如何用好有过失的干部…………………………………………………………………蒋红波(34)办公室领导办公室工作如伺体现科学发展观要求…………………………………………………王合清(36)怎样在被动服务中求得主动……………………………………………………………方黎(38)学术动态中国领导科学研究会2007年年会将在上海市召开 (43)领导决策实现政府公共决策机制法治化的基本途径……………………………………………李光明(40)领导素养领导行为与对人的认识…………………………………………………………………周丽丽(42)军事领导基层政治工作如何贯彻科学发展观……………………………………………………鲁鸿飞(44)培养官兵对制度的敬畏感………………………………………………………………何洪江(46)领导鉴戒“大胜”更须戒骄………………………………………………………………………李颖(48)领导作风领导工作应坚持“三真”原则………………………………………………余丰立朱伟(47)外国政要帕蒂尔:温和印度的政治选择……………………………………………………………史泽华(50)治政史鉴朱元璋的反贪之策………………………………………………………………………韩立竖(52)特别阅读真相(中篇小说梗概) (54)热风细雨“经济提拔”与“提拔经济”…………………………………………………………江波(35)新视野(十七大的历史地位和历史意义)等7篇 (18)中国人才[半月刊]= Chinese Talents Magazine.—第10期,2007年.—北京:中国人才杂志社,(100101).6.00元ISSN 1003-4072 CN 11-2455/C索书号:C96/5 馆藏地:西康校区四楼江宁校区二楼本期目录内容人才精论“以人才为本”是人才开发的核心 (1)瞭望要闻.政策法规.声音.动态.数字信息 (4)考录:严把公务员“入口”关倡培养造就高素质公务员队伍 (10)人才市揭:为人才成长提供良好机遇与环境 (12)高校毕业生就业服务成效显著 (14)聚焦人事争议仲裁制度迈向新的发展 (15)完善人事争议仲裁构建和谐社会——《人事争议处理规定》解读 (16)努力开创人事争议仲裁工作新局面 (20)“六大人才高峰”彰显人才集聚效应 (21)高技能人才从何而来 (23)造福于民方能造福于己 (25)以.三最.为民生轴心彰显科学发展 (25)理论研究区分公共服务与经营性服务的理论思考 (26)探寻人才科学开发之道 (29)如何实施人才激励 (31)人才铺就小康路·走进昆山实施“人才强市”大战略加速“两个率先”新征程——本刊专访中共昆山市委书记张国华 (38)广纳八方英才创新昆山发展 (42)人才亮点点亮昆山 (44)名家在线科学大家平民本色——记中国测绘科学研究院名誉院长、中国工程院院士刘先林眉 (56)群星闪烁 (59)公务员管理提高公务员考试科学性 (61)加强县乡公务员队伍建设必须从优化人员结构入手 (63)“在线学习”引领干部培训“网络化” (66)事业单位聘用制推行中常见问题与对策分析 (68)如何做好当前外国专家管理与服务工作 (68)西部地区海外引才的一道亮丽风景线 (70)巧用职称评聘“杠杆”支撑人才活力 (72)人才资源配置流动人员人事档案管理难点与对策 (74)搞好毕业生人事档案管理 (77)县域人才开发如何与国际化接轨 (79)集团文化建设落地的关键点 (80)国有企业“二线”人员的开发 (81)简明定位“薪”事不再重重 (83)公备员在受处分期间受到新的处分,处分期如何计算 (85)未满服务期辞职应如何承担违约责任 (86)27 经济、经济学(F 经济)中文期刊世界经济[月刊]=The Journal of World Economy /中国经济学会中国社会科学院世界经济与政治研究所.—第2期,2008年2月.—北京:《世界经济》编辑部,(100732).15.00元ISSN1002-9621 CN11—1138/F索书号:F1/45本期目录内容国际贸易与国际投资研发全球化与本土知识交流:对北京跨国公司研发机构的经验分析…………………………………………………………………梁正,薛澜,朱琴,朱雪炜(3) 区际壁垒与贸易的边界效应…………………………………………赵永亮,徐勇,苏桂富(17) 国际金融国际分工体系视角的货币国际化:美元和日元的典型事实……………………徐奇渊,李婧(30) 存在金融体制改革的“中国模式”吗…………………………………………………应展宇等(40) 宏观经济学习惯形成与最优税收结构…………………………………………………………邹薇,刘勇(55) R&D溢出渠道、异质性反应与生产率:基于178个国家面板数据的经验研究……………………………………………………………………………高凌云,王永中(65) 中国经济三种自主创新能力与技术进步:基于DEA方法的经验分析……………李平,随洪光(74) 经济史明代海外贸易管制中的寻租、暴力冲突与国家权力流失:一个产权经济学的视角……………………………………………………………………………………郭艳茹(84) 会议综述第一届青年经济学家研讨会(YES)综述 (95)经济与管理研究[月刊]=Research on Economics and Management/首都经济贸易大学.—第2期,2008年2月.—北京:《经济与管理研究》编辑部,(100026).10.00元ISSN1000-7636 CN11—1384/F索书号:F2/8本期目录内容会议纪要努力探索中国特色国有公司治理模式——中国特色国有公司治理高层论坛综述 (5)专题论坛改革开放与国有经济战略性调整………………………………………………………王忠明(13) 股权多元化的国有控股公司治理结构特点及其构建………………………………魏秀丽(21) 剩余权的分配与国企产权改革……………………………兰纪平,罗鹏,霍立新,张凤环(28) 企业创新需求与我国自主创新能力的形成:基于收入分配视角………………………张杰,刘志彪(33) 集成创新过程中的三方博弈分析……………………………………………宋伟,彭小宝(38) 创新与企业战略制定模式的演进………………………………………刘鹏,金占明,李庆(43) 企业管理大型国际化零售企业经营绩效的影响因素分析………………………………蔡荣生,王勇(49) 跨团队冲突与组织激励机制分析………………………………………………李欣午(54) 运用基尼系数增强企业薪酬制度的公平性……………………………王令舜,马彤(59) 三农研究乡村旅游发展的公共属性、政府责任与财政支持研究……………单新萍,魏小安(64) 论失地农民长效保障机制的构建………………………………………………魏秀丽(69) 资本市场外资银行进入与东道国银行体系的稳定性:以新兴市场国家为例………………张蓉(74) 挤兑风险与道德风险的权衡:显性存款保险制度下最优保险范围的制定…冯伟,曹元涛(80) 贸易经济在反倾销中对出口商利益的考量………………………………………………金晓晨(86) 我国加征出口关税政策思辨…………………………………………夏骋祥,李克娟(90) 名刊要览公司治理和并购收益 (94)规制——自由化的必由之路:以色列电信市场1984-2005 (94)金融与收入分配不平等:渠道与证据 (94)特别主题论坛:重新审视组织内部和组织自身的“污名”问题 (95)经济理论与经济管理[月刊]= Economic Theory and Business Management.—第11期,2007年.—北京:《经济理论与经济管理》编辑部,(100080).8.00元ISSN 1000-596X CN 11-1517/F索书号:F2/12 馆藏地:本部四楼江宁二楼本期目录内容深入贯彻落实科学发展观的经济视阈……………………………………………………张雷声(5) 科学发展观与中国特色社会主义经济理论体系的创新与发展…………………………张宇(9) 关于转变经济发展方式的三个问题……………………………………………………方福前(12) 统筹城乡协调发展是落实科学发展观的重大历史任务………………………………秦华(16) 中国进出口贸易顺差的原因、现状及未来展望………………………………王晋斌李南(19) 劳动力市场收入冲击对消费行为的影响………………………………………杜凤莲孙婧芳(26) 中国经济增长中土地资源的“尾效”分析……………………………………………崔云(32) 货币需求弹性、有效货币供给与货币市场非均衡模型解析“中国之谜”与长期流动性过剩……………………………………………………………………………………李治国 (38) 全流通进程中的中国股市全收益率研究………………………………………陈璋李惊(45) 金融体系内风险转移及其对金融稳定性影响研究……………………………………许荣(50) 金融衍生品交易监管的国际合作……………………………………………………谭燕芝等(56) 税收饶让发展面临的挑战及我国的选择………………………………………………张文春(61) 区域产业结构对人民币升值“逆效应”的影响………………………………………孙伯良(66) 企业社会责任管理新理念:从社会责任到社会资本……………………………………易开刚(71) 关于建设创新型国家的讨论综述………………………………………………………杨万东(76)经济理论与经济管理[月刊]= Economic Theory and Business Management.—第1期,2008年.—北京:《经济理论与经济管理》编辑部,(100080).8.00元ISSN 1000-596X CN 11-1517/F索书号:F2/12 馆藏地:本部四楼江宁二楼本期目录内容经济热点中国宏观经济形势与政策:2007—2008年………………………中国人民大学经济学研究所(5) 理论探索出口战略、代工行为与本土企业创新——来自江苏地区制造业企业的经验证据…张杰等(12) FDI在华独资化的动因——基于吸收能力的分析……………………………秦凤鸣张中楠(20) 学术前沿主权财富基金的发展及对21世纪初世界经济的影响………………………宋玉华李锋(27) 公共经济环境税“双重红利”假说述评……………………………………………………………司言武(34) 基于合谋下的税收征管激励机制设计………………………………………………岳朝龙,等(39) 金融研究内生货币体系下房价波动对货币供求的冲击…………………………………丁晨屠梅曾(43) 基于DEA的中小企业债务融资效率研究………………………………………曾江洪陈迪宇(50) 区域经济地区经济增长中的金融要素贡献的差异与金融资源配置优化——基于环北部湾(中国)经济区的实证分析…………………………………范祚军等(54) 工商管理基于价值链的预算信息协同机制研究………………………………………………张瑞君,等(59) 公司特征、行业特征和产业转型类型的实证研究……………………………王德鲁宋学锋(64) 国际经济基于市场体系变迁的中国与欧洲银行业发展比较……………………………胡波郭艳(70) 动态与综述我国发展现代农业问题讨论综述………………………………………………………王碧峰(75) 全国马克思列宁主义经济学说史学会第十一次学术研讨会纪要……………………张旭(80)国有资产管理[月刊]= State assets management /中国人民共和国财政部.-第1期,2008年.—北京:《国有资产管理》杂志社,(100036) .10.00元ISSN 1002-4247 CN 11-2798索书号:F2/51 馆藏地:西康校区四楼本期目录内容贯彻落实科学发展观开创中央企业又好又快发展新局面.................................李荣融(4)努力做好新形势下的监事会工作..................................................................黄丹华(8)资产评估行业发展的重要里程碑...............................................................朱志刚(13)加快评估立法步伐加强评估法律体系建设................................................石秀诗(15)资产评估行业将进入新的发展时期............................................................李伟(16)提升资产评估执业质量促进资本市场健康发展..........................................李小雪(17)评估准则对中国不动产及相关资产评估的作用..............................埃尔文.费南德斯(18)发挥评估准则对中国资产评估行业健康发展的作用.......................................林兰源(20)正确发展适合中国国情的评估准则..........................................格来格.麦克纳马拉(21)财政部国资委关于印发《中央企业国有资本收益收取管理暂行办法》的通知 (22)财政部关于印发《中央国有资本经营预算编报试行办法》的通知 (25)力口快建立国有资本经营预算推动国民经济又好又快发展..............................贾谌(28)关于国有企业改制和整体上市..................................................................季晓南(30)加快建立科学规范的财务监督体系............................................................孟建民(39)贯彻科学发展观’开创财务监督管理工作新局面..........................................赵杰(43)寓监管于服务之中——对做好四川国资监管工作的思考.................................李成云(47)努力实现广西区国资国企健康发展............................................................尹建国(49)新企业会计准则对国资监管可能带来的影响................................................安玉理(52)2007年宏观经济形势分析及2008年展望 (54)央企人力资源管理的“蜕变”......................................................周放生张应语(57)推进预算管理与资产管理相结合的实践探索.......................................广东省财政厅(60)规范事业资产管理保障水利事业可持续发展..............................水利部财务经济司(63)全面提高产权管理水平推动中国石化快速发展.....................中国石油化工集团公司(66)规范运作加快整合提高控股上市公司的核心竞争力......中国航空工业第一集团公司(69)强化产权制度建设实现产权规范有序流转.................................国家开发投资公司(71)加强国有资产评估管理确保国有资产有效流转...........................中国电信集团公司(74)上市公司国有股价值变化的信息披露.............................................文宗瑜谭静(77)进一步提高中央企业安全生产管理水平 (80)国有资产管理[月刊]= State assets management /中国人民共和国财政部—2期,2008年.—北京:《国有资产管理》杂志社,(100036) .10.00元ISSN 1002-4247 CN 11-2798索书号:F2/51 馆藏地:西康校区四楼本期目录内容进一步提高中央企业安全生产管理水平.........................................................黄淑和(4)关于中央企业履行社会责任的指导意见 (10)深入贯彻落实科学发展观更好地推进中央企业履行社会责任工作——国务院国资委就《关于中央企业履行社会责任的指导意见》答记者问 (12)完善体制机制和政策措施促进经济发展方式转变.......................................陈柱兵(17)转变国有经济发展方式实现国有资产保值增值.......................................郭复初等(21)国有独资公司董事会的重塑.....................................................................赵大鹏(25)加强沟通交流提高监督质量......................................................张仆杨中静(29)以科学发展理念构建地方国资监管体系的思考.............................................汤光强(31)2008年宏观经济增长趋势展望及政策建议...................................................课题组(34)强化资产安全与效益监管服务交通事业又好又快发展........................交通部财务司(38)积极探索整合资源加强事业单位国有资产处置管理........................湖南省财政厅(41)全面开创国有资产管理工作新局面...................................................河南省财政厅(43)在实践中不断捉高集团公司产权管理水平.................................中国核工业集团公司(46)规范产权管理做好主辅分离助推企业发展........................中国冶金科工集团公司(49)公司治理与企业竞争力...........................................................................周放生(53)中国资产评估协会关于印发《资产评估准则——评估报告》等7项资产评估准则的通知 (55)国有公司治理结构存在的问题及其法律风险防范……………………………………王玉宝(61)加强对外投资及多种经营监管…………………………………………………………张凯(64)盈余管理对企业有益性的探讨…………………………………………………………葛晓红(66)国有企业引进战略投资者的策略……………………………………………屈艳芳郭敏(68)促进我国企业内部控制的建设………………………………………………张宜霞文远怀(71)企业年金信托管理的治理结构研究(一) ……………………………………李连仁周伯岩(74)美英国家政府绩效考评对我国的启示与借鉴…………………………………………聂常虹(76)复印报刊资料·外贸经济、国际贸易[月刊]=Economy of Foreign Trade And Internaional Trade.—第1期,2008年.—北京:中国人民大学书报资料中心,(100086).11.00元ISSN 1001-3407 CN 11-4289/F索书号:F7/17 馆藏地:西康校区四楼本期目录内容本刊综述2007年国际贸易与我国对外贸易问题综述………………………………………………王亚星(3) 研究与探讨试论新贸易理论之新……………………………………………………………郭界秀朱廷捃(9) 比较优势理论的有效性:基于中国历史数据的检验……………………………………管汉晖(14) 制度分析视角中的贸易开放与经济增长——以投资效率为中心……………………盘为龙(23) 国际贸易、外国直接投资、经济增长对环境质量的影响——基于环境库兹涅茨曲线研究的回顾与展望…………………………胡亮潘厉(30) 贸易政策贸易模式与国家贸易政策差异…………………………………………………………曹吉云(37) 分工演进对贸易政策的影响分析——基于交易成本的考虑…………………张亚斌李峰(44) 中国贸易结构的变化特点、决定要素以及政策建议……………………………………章艳红(50) 专题:进出口贸易二元经济结构、实际汇率错位及其对进出口贸易影响的实证分析……………………吕剑(56) 人民币汇率波动性对中国进出口影响的分析……………………………………谷宇高铁梅(66) 中国对外贸易出口结构存在的问题……………………………………………………魏浩(75) 服务贸易国际知识型服务贸易发展的现状、前景及我国对策分析……………………潘菁刘辉煌(80) 国际服务外包趋势与我国服务外包的发展……………………………………李岳云席庆高(86) 文摘加快我国资本输出和经济国际化的建议......................................................裴长洪(90) 双赢的中美经贸关系缘何被扭曲...............................................................李若谷(91) 索引 (93)英文目录 (96)复印报刊资料·市场营销 [月刊]=Marketing.—第2期,2008年.—北京:中国人民大学书报资料中心,(100086).6.00元ISSN 1009-1351 CN 11-4288/F索书号:F7/26 馆藏地:西康校区四楼视点营销资讯 (4)特别关注激情燃烧的岁月——行将远去的2007…………………………………………………刘超等(6) 营销创新数字营销上路……………………………………………………………………………岳占仁(12) 手机广告:精准营销的黄金地段…………………………………………………………王浩(15) 论坛营销分析中小企业网上营销安全问题分析...............................................................潘素琼(17) 如何克服电子邮件营销中的广种薄收.........................................................郝洁莹(19) 国产洗发水何以走出迷局? (21)营销人物校长茅理翔………………………………………………………………………………叶丽雅(23) 营销策略博客营销策略……………………………………………………………………………缪启军(26) 企业社会责任标准下的出口营销策略转变……………………………………于晓玲胡日新(29) 品牌管理品牌管理的价值法则……………………………………………………………………辰平(30) 品牌延伸:中国企业需要补课……………………………………………………………曾朝晖(33) 渠道管理渠道模式:一半是火焰一半是海水………………………………………………………钱言(36) 弱势品牌渠道拓展之路…………………………………………………………吴勇毅陈绍华(39) 销售管理销售经理管控销售队伍的四种工具……………………………………………………谢宗云(41) 遭遇难题,见招拆招……………………………………………………………虞坚老树(44) 销售冠军是怎样炼成的——专访苏宁朝阳路店店长刘玉君…………………………齐鹏(47) 成功策划“右手之戒”成就戴比尔斯 (49)拉芳舍一个休闲餐饮王国扩张之谜……………………………………………………王翼(51) 阿尔迪最赚钱的“穷人店”………………………………………………………………杨育谋(53) 个案解读LG巧克力手机得失之间…………………………………………………………………林景新(56) 南京菲亚特:四面楚歌……………………………………………………………………陈宇祥(58) 奥克斯:反思“三大败笔”…………………………………………………………………刘步尘(62)财经科学[月刊]=Finance And Economics—第4期,2007年.—成都:《财经科学》编辑部,(610074).8.00元ISSN1000-8306 CN51-1104/F索书号: F8/19 馆藏地:本部四楼江宁二楼。
A Hamiltonian weak-wave model for shallow-water flow

1
1. Introduction An important area of research in geophysical fluid dynamics is the development of simplified models. Simplified models are reduced models of the full hydrodynamical equations of motion that retain the essential physics of the problem under investigation, yet are reduced in complexity and are therefore more amenable to theoretical analysis. A generic property of atmospheric and oceanic dynamics is the existence of nonlinear vortical motion, evolving on an advective timescale, together with relatively fast acoustic and gravity wave motion. While both kinds of motion can be identified observationally, it is generally the case that the vortical motion overwhelmingly dominates the fast wave motion for both meso-scale and large-scale dynamics. This fact has led to a class of simplified
AMM第644-650卷目录PART 4

Table of ContentsPreface liii PART 4An Improved Scheme of One-Time Password Identity Authentication Based on theS/KEY SystemJ.Y. Li, H. Shi, Y.Q. Deng, J. Gong and Y. Guan (2763)The New Key-Stream Generator Based on the OFB Mode of AESH. Shi, J.W. Lu, Y.F. Ji, C. Wu, J. Gong and Y.Q. Deng (2768)Collaboration Research on Web 2.0B. Wu and C.Y. Zhang (2772)An Online E-Payment System Applying to Auto Insurance Based on Proxy Blind Signature L.M. Sha and S.Z. Yang (2776)Network Security Situation Awareness Based on Phishing DetectionJ.Y. Zhang, C.G. Song and X. Jin (2784)Supermarket Trolley Positioning System Based on ZigBeeZ. Zhang, X.P. Tao, L. Zeng and C. Wang (2788)Study of Web Service Discovery Algorithm Based on SemanticL. Zhao and W. Zhang (2793)Research on Usage Intention of Community Information SystemW.P. Li, J. Yang, K.S. Kim and W. Sun (2797)Discussion on the Application of Networking Technology in Intelligent Campus ConstructionA. Wang and X.Q. Zhang (2804)Design of Pesticide Safety Evaluation of SoftwareX.H. Zhang and Y. Lin (2808)The Key Technology and Application of the Internet of ThingsC.M. Li, R. Wang and L. Huang (2812)A Combined Method for Chinese Micro-Blogging Topic TrackingX. Zhang, B. Shang, L.L. Dong and Y.J. Zhu (2816)A Software Design Model Based on Big DataZ.L. He, X.H. Xiao and Y.H. He (2821)Research on Security of P2P TechnologyL.H. Wang (2826)Research of Network Information Platform Construction of ERP System in Manufacturing J.H. Zhang (2830)Optimization of Clustering Algorithm in Ad Hoc NetworkQ. Yu and P. Zong (2834)Research and Improvement of Dynamic Source Routing Protocol Based on Ad HocP. Zong and J. Qin (2838)Safety Strategy of Campus Network Realize Based on Core SwitchY.Y. Lu, Y. Yang and B. Zang (2842)Complex Opinion Network Correlation ClusteringF.Y. Wang, S. Qiu and Q. Li (2846)The Application of Database Technology in Network Management SystemG.L. Cheng and M.Z. Li (2850)Research on the SDN-Based Architecture of Space-Sky Information NetworkD.M. Yuan and R.W. Ren (2854)Study on the Campus Website ConstructionC. Liu (2857)Research on QoS Guarantee Technology for Intercom System Based on SIPZ. Li, Q.Y. Yang, Y.C. Zhou and H. Ren (2863)Applied Research for Campus Student Credit Management System under the Cloud Storage Y.J. Kang and L. Ma (2868)Assess on E-Commerce Transaction Based on Web TechnologyK. Xiao (2872)NTP DRDoS Attack Vulnerability and MitigationA. Alfraih Abdulaziz Nasser and W.B. Chen (2875)Binary Tree Model-Based Mobile Ad Hoc Network Dynamic Address AllocationMechanism ResearchJ.L. Liu and L. Zhu (2881)A High-Throughout Design of CAVLC Decoder for H.264/AVCY. Wang and X.Q. Su (2886)A Distributed Comprehensive-QoS Multicast Routing Algorithm on WSNsW.J. Xiao and S. Zhong (2890)Mobile Game Development with Flash as the EditorH.T. Zhang, Q.J. Sun and Y.C. Liu (2898)Design and Implementation of Service Traffic Awareness System in LTE NetworkJ. Wang, Z.Z. Zhang and Y.L. Luo (2902)A Hadoop-Based Performance Optimization of Network Stream Input FormatX.P. Wang, J.T. Luo, W. Gao and Y. Liu (2906)Dynamic Non-Cooperative Structured Deep Web SelectionS. Deng (2911)Multimedia Technology of Digital Tourism Based on Android SystemJ. Zhang (2915)Vulnerability Assessment of Information System Based on Weighted Directional Graph andComplex Network TechnologyY.Z. Li (2920)Key Technologies Analysis on Management System Data WarehouseX.F. Yang (2925)Research on Action Design System Based on TechnologyL. Xu, W. Lei and W.M. Xu (2929)Numerical Analysis and Performance Test Based on Multi-Media Internet Architecture J.P. Fan (2934)The Architecture and Implementation for International Trade Settlement Software DesignG.J. Zhang (2939)A Web Services Security Policy Description ModelH. Zeng, Y.W. Zhao and D.F. Ma (2943)The Simulation Platform in City Traffic Environment Based on TinyOS for WirelessSensor NetworksT.J. Ren, H.X. Lv, Z.Q. Wang, Y.R. Chen and Y.L. Liu (2947)Automatic Threat Assessment of Malware Based on Behavior AnalysisJ.G. Jiang, X.J. Ma, X.L. Qiu, M. Yu and C. Liu (2952)Design of Wireless Sensor Networks Border Router Based on IPv6D.W. Xu, L.L. Deng and S. Ren (2957)Research of Network Virtualization in Data CenterX.L. Tan, W.B. Wang and Y.Q. Yao (2961)The Software Support Analysis of Information SystemH. Wang, X.Y. Li, X.N. Wang and W.N. Liu (2965)Study on a Novel GIS-Based Routing StrategyY.W. Wang and D.Y. Ji (2969)Development of a New Routing Protocol Based on GPSR for Wireless Sensor NetworksC.F. Xing, L. Yang and Q.L. Han (2973)The Study of Network Information Security Based on Information Filtering Technology L.L. Wei and W. Yang (2978)The Implementation of Cloud Storage System Based on OpenStack SwiftZ.Y. Duan and Y.Z. Cao (2981)Research and Design on Multilevel Secure Database Inference ControlH.Y. Zhao, R.G. Liu and X.G. Liu (2985)Research on Secure Model in WiFi/WiMAX Mixed Networks Based on Pre-Authentication Z.T. Ni, Y. Zhong and L. Huang (2988)Research on Database Front-End Applications Exploration Based on PowerbuilderL. Huang, Y. Wang and Z.T. Ni (2992)Research on Dynamic Self-Adaptive Network Security Model Based on Mobile Agent K.Q. Fan (2996)Research on the Implementation Methods of Security Management of Distributed DatabaseApplication SystemN. Zheng and Y. Gao (3000)Research on Shared Information Platform for Expressway Management Information SystemC. Wang and Y.L. Li (3004)Research on Ad Hoc Network Security Protection Model Based on Mobile AgentQ. An, Y.J. Luo, H.Y. Zhao and J. Zhao (3008)Research on Information Resources Sharing Patterns Based on Cloud ComputingW.J. Yang, Y.J. Luo, H.Y. Zhao and X.T. Li (3012)Research on the Model of Personalized Recommendation System Based on Multi Agent Q. Wang, J.Z. Ping, L.L. Yu and Z.J. Wang (3016)Research of Music Retrieval System Based on Emotional Music TemplateX. Wang (3020)A New Trust Model in P2P NetworkX.L. Li, L.C. Wu, J.J. Xiang, H.L. Ma and F. Liao (3024)Research on Relay Node Placement Based on Hybrid Greedy Optimization Algorithm inWireless Sensor NetworksH. Xu and H. Zhang (3028)Security Research of the Mobile E-Government TerminalS.Y. Guan, Y. Fan and H.L. Lv (3032)Analysis of College Students' Online Business in ChinaA. Abuduaini and N. Aishanjiang (3036)Thought about the Construction of Digital Employment Information Service System of RuralMigrant Workers in the West Area of JilinX.L. Wang (3040)Design and Implementation on Sina Micro-Blog Client Based on the Android SystemC.Y. Shi (3045)On SOA Community Informationization Foundation Database Generic Interface Design Y.B. Zhou (3049)Research on Storage Strategy of Unstructured Small Files in HDFSL.T. Wu, T.N. Wang and H.R. Hu (3053)The Building of the Database of Art Resources Research for Academy of Fine ArtsM. Zhao (3057)Research and Implementation of Auxiliary Teaching System Based on C/S ModelY.J. Cong (3061)The Improvement of the Public Service System Based on Web TechnologyR. Qian (3065)Design of Extended Event Service Model Based on CORBAC.X. Zhao (3069)Modeling and Analysis of NOTAM Distribution Services Based on Petri NetJ. Hu, X.Y. Song and J.Z. Sun (3073)Research of the Database Access Technology FrameworkX.D. Zhang, Z.M. Teng and D.W. Zhao (3077)Dynamic Visual Elements in the Digital Media DesignT. Sun (3081)Design Research on the Resident Electronic Health Recorder SystermN. Liu (3085)The Web Development Technology Research of Cross Platform Mobile Application S. Sun and S.X. Cao (3090)The Universal Middleware Architecture Based on the Web of ThingsR. Zhang and P. Zhang (3094)Development of Travel Reservation System for Mobile PlatformL.J. Sun (3099)Research on Statistics Based Multi-Priority MAC Protocol for Ad Hoc NetworksP. Wang, H. Li, B.L. Ye, C. Chen and Y.B. Wang (3103)LEACH-EO: A More Energy-Efficient LEACH Protocol for WSNJ. Zhang, H. Yan, Y. Cui, H. Rong and J.P. Wang (3108)Authorization Management System of Micro Video Based on FFmpegQ. Guo, Y.G. Xu and S.X. Cao (3112)Research on Network Video Data Acquisition and Analysis Based on Big DataH. Ji and S.X. Cao (3116)The Design and Implementation of Community Property Management SystemQ.H. Wu and H. Zhao (3120)The Integration of Sports Information in Personalized NetworkH. Zhao, Q.H. Wu and J.B. Zhao (3124)Situation and Development Strategies of Sports Entertainment Groups inNetwork EnvironmentJ.B. Zhao, H.J. Ji and H. Zhao (3129)Reverse Engineering OWL 2 Ontologies to UML ModelsW.J. Li (3133)The Study on Educational iOS and Android Application Program of Sports Skillsand KnowledgeN. Liu and D.Y. Yang (3137)Research on Development of Books Interview PlatformH.M. Zhang and N. Li (3141)The Development of Information Integration System for Oil Production Equipment M.T. Wang (3145)The Design and Implementation of Oil Production Equipment Data Management System M.T. Wang (3149)The Development on Information Collection System Based Internet of ThingsC.W. Luo, X.W. Yin and C.D. Ni (3153)Design and Implementation of Computer Equipment Management System Based onOracle DatabaseX.M. Jiang (3157)Agricultural Products Traceability System Design Based on IOTX. Qian, D. Wang and W.M. Luo (3160)Design and Implementation of the Hospital Information Management System Based onthe M. Li and S.Y. Yang (3166)Professional Software Analysis and Comparison for Graphic DesignR.H. Wang (3170)A Network Security Risk Computation Approach Based on Attack GraphsC. Wang (3174)Application of Computer Network of Virtual Reality in Design of ArtJ. You (3178)Cryptographic Protocol Verification Based on the Extension RuleH. Lin (3181)The Frame Study of Translation System Design Based on Database ManagementL.H. Liu, F.J. Meng, Y. Lei, Y. Sun, J.Q. Mu, Z.L. Zhu, Y. Yan, Y.H. Zhang, L. Sun and Z. Lv (3185)Efficiency Analysis of Command Networks with Cross-Level of Different GroupsL.F. Yu, J.B. Wu, J. Liu, B.X. Xiu and W.M. Zhang (3189)Study and Practice Based on Network TechnologyW.H. Zhao, D.P. Xu, H.Y. Gong and Y. Li (3195)Application Research on Virtual Reality TechnologyY. Li, H.Y. Gong, D.P. Xu and W.H. Zhao (3199)Network Topology Discovery Algorithm Based on OSPF Link State AdvertisementZ.J. Shen and Y.S. Ge (3203)A Cloud-Based Mobile Telemedicine Consultation System Based on iPadH. Wang, T.H. Li and F. Wu (3208)Design of Network System Security System of Digital LibraryS. Liu (3212)Information Management System of Metrological Evaluation Based on SSH Framework S. Zhang, J.M. Zhu, Y.H. Qin and L.L. Qu (3216)Design and Implementation for the Upper Computer Software of the Two-DimensionalTurntable System Based on MFCY.N. Xiang Li and X.J. Yang (3220)Available Storage Space Sensitive Replica Placement Strategy of HDFSW.T. Zhao, Y. Ding and X.H. Zhang (3224)LBSN-Based Personalized Routes RecommendationL.C. Zhu, Z.J. Li and S.X. Jiang (3230)An Intelligent Human-Computer Collaborative Method for Creative DesignJ.W. Wang (3235)Research of Cloud Manufacturing Technology in the Development of Digital IntelligentProduction Control PlatformG.L. Feng (3241)A Remote and Unified Software Automated Deployment PlatformJ.P. Zhao, X.Y. Liu, H.H. Wu, X.L. Chen, L. Yang and D.H. Zhang (3245)Design and Implementation of Multi Granularity Access Framework Based on AOP Q. Wang and Y.B. Wang (3251)A Smart Grid Data Global Placement Strategy Based on Cloud ComputingY.K. Li, D. Xin and H.G. Liu (3256)Design and Implementation of Binary Utilities GeneratorJ.Q. Shen, J. Wu, Z.F. Zhang and H.Q. Ren (3260)SERP: A Simple Energy-Hops-Based Routing Protocol in WSNsM.X. Li, X.C. Zhou, X.H. Fan and S. Wang (3266)Human Error Simulation of Manufacturing Cell Based on Human-Machine Integrated ModelD.F. Zhao, X.D. Zhang, C.J. Gong and C.C. Wang (3270)A Methodology for the Exploration of 802.11BH. Yang (3275)Research on Data Aggregation Application Based on MashupM.Y. Cai and B. Pan (3279)Research on ASIC Firewall Based on State Detection TechnologyS.Q. Wang and H.Y. Chen (3283)Detection Technology for Hostile Attacks to Campus Wireless NetworkL. Ma and H.X. Yang (3287)Research on the Detection Method of the Malicious Attacks on Campus NetworkJ.L. Wang (3291)Detecting Overlapping Communities with MDS and Local Expansion FCML. Li, Z.M. Xia, S.H. Li, L. Pan and Z.H. Huang (3295)Comparison Analysis of RESTful and SOAP-WSDL Applied in the Image Management System R.Y. He (3300)Study on Digital Content Representation from Direct Label Graph to RDF/OWL Language into Semantic WebK.A.L. Khamis, L. Zhong and H.Z. Song (3304)Research on Multilevel Secure Database Inference ChannelH.Y. Zhao, J. Meng and X. Zhang (3310)Design and Realization of IOT-Based Video Monitoring SystemJ. Yin and C.H. Li (3314)Storage Model Based on Oracle InterMedia for Surveillance VideoB. Sun, W.S. Luo, L.B. Du and Q. Lu (3318)A Noise-Optimal Integrator for High-Precision SC Sigma Delta ModulatorsX.L. Wang and Y.W. Zhang (3322)Research on Vehicle Networking Transfer Channel Based on MAC Safety Information System Y. Zhou, T.J. Ren, Z.Q. Wang and Y.L. Liu (3329)Application of Neural Network in Network Intrusion DetectionZ. Yang and H. Du (3334)The Study of the Ontology and Context Verification Based Intrusion Detection ModelG.F. Guo (3338)Environmental Monitoring System Designing: A Internet of Things ApproachG.H. Wu, F. Liu, J.X. Li and W. Wang (3342)Remote Inspection System Algorithm Research of Wireless Base StationM.D. Bai and Y. Dong (3346)Application Research of Visual Simulation Technology in the Field of Marine EngineRoom SimulatorH.S. Shen, J.D. Zhang, Y.B. Li and F. Han (3350)Application of Function Point EstimatingC.H. Zhou (3357)Design and Research of Computer System High Confidence Fault TolerantJ.Q. Qi (3361)FMPC: A Fast Multi-Dimensional Packet Classification AlgorithmZ.H. Guo, L. Li, Q. Wang, M. Lin and R. Pan (3365)Code Protection Technology on iOSJ.T. Weng, Q. Mu, X.Y. Liao, Y.Z. Li, Q.X. Zhang and Y. Tan (3371)Distribution of Database in Cloud Based on Associated MatrixL.Y. Yao and W. Yang (3375)Finite Element Numerical Simulation Research on Fractured Horizontal Well’s Productivity M.X. Liu, J.H. Li and L. Zhang (3379)Research of Augmented Reality for Children’s Books on the Basis of ArtoolkitsW.G. Yang (3383)Research and Practice of Cloud Computing Based on HadoopA.S. Lu, J.J. Cai, W. Jin and L. Wang (3387)Review on Application of Virtual Reality in the Physical SimulationZ.J. Cai (3390)Overhead Analysis of Loop Parallelization with OpenMP DirectivesL.Y. Xiang, Z.Y. Fang, Y. Wang, G.N. Qu and Z. Chen (3394)Design and Implementation of Cloud Management SystemH.Y. Yu, T.X. Yang and X. Fu (3398)Study on Replacing-Element Imagery Design of Dongba Characters Combined withChinese CharactersW.J. Song, Y.F. Yang and R.P. Xu (3402)Research on Multilayer Security Audit Research Based on Attack Graph in Cloud Computing L.B. Wen (3408)An Efficient Secure Multichannel Traffic Management Scheme in 2.4 GHz Home AutomationNetwork with IoT FunctionsM. Wei and P. Wang (3412)Chapter 5: Electronics and Microelectronics, Embedded and IntegratedSystems, Power and Energy, Electric and Magnetic SystemsA Study on Reconfiguring On-Chip Cache with Non-Volatile MemoryM.Q. Wang, J.T. Diao, N. Li, X. Wang and K. Bu (3421)A Circuit Model of the MemcapacitorW. Wang, H. Xu, Y.W. Hou and H.J. Liu (3426)Titanium Oxide Memristor Based Digital Encoder CircuitY.W. Hou, X. Xu, W. Wang, X.B. Tian and H.J. Liu (3430)Application of Digital Coordinate Transformation to a New Posthole Broadband SeismometerC.Y. Peng, B. Xue and J.S. Yang (3434)Research and Design of Asynchronous FIFO Based on FPGAB.Q. Liu, M.Z. Liu, G. Yang, X.B. Mao and H.L. Li (3440)Wind Power Allocation Based on Predictive Power CorrectionZ.H. Feng, T.J. Jia, X.M. Xiao and F.J. Zhang (3445)The Application of LED Lighting in Museum Exhibition HallY. Zheng, L.W. Huang, M.M. Wang, H.Q. Chen and L.Z. Zhang (3449)A High Reliable Communication Method for the Terminal of a Networked and DistributedPower Supply SystemE. Lu, B. Huang, S.S. Li and Y. Yang (3453)A New Method of Cross-Correlation by Magnetic Dipole for Estimating MagnetizationDirection under the Influence of Remanent MagnetizationL. Shi, L.H. Guo and F.Y. Guo (3459)The Condition Assessment of Distribution Transformer Based on Improved AnalyticHierarchy ProcessX.P. Meng, L. Li, H. Wang and X. Ji (3463)Effects of Different Sample Resistances on the Insulator Leakage Current Acquisition Results P.C. Miao and Z.N. Xu (3468)Research and Design of Video Acquisition System Based on FPGAB.L. Liu, B.Q. Liu, L. Pan and L. Wang (3472)High Rate Data Transmission System Based on OFDM for Well LoggingQ.S. Gu, W. Chen and R.Q. Wu (3476)Application of On-Line Ultrasonic and UHF Partial Discharge Detection in 1000kV GISF. Chen, H.Z. Tang and H.G. Li (3480)Synchronization of Hyperchaotic Memristor-Based Chua’s CircuitsH.L. Huang, Y. Peng and J.J. Huang (3485)Prediction of Nuclear Power Project Cost Based on Improved Non-Equidistant GM (1,1) Modeland Exponential Regression ModelB.Y. Liu, D.X. Niu, J.P. Qiu, H. Xu and Y. Wang (3489)Design Principle and Applicative Value of Photovoltaic SystemM. Chen, L. Chen, X. Tang and Y.H. Hu (3493)Research of Signal Integrality in PCB Design for ARM9 Core BoardL.Y. Su (3497)Formal Analysis of Memory Leak DefectsW. Zhang, Z.Y. Ma, Q.L. Lu, L. Wan and D.W. Liu (3501)Research and Application of a Solution to Acquire Electric Energy DataS.Y. Long, X. Lu and Y.S. He (3505)The Transient Characteristics Analysis of Doubly-Fed Induction Generator during theAsymmetric Voltage SagJ.H. Zhang, H.R. Shen, L. Ding and C.L. Dai (3509)Optimal Substation Locating and Sizing Based on Improved Weighted Voronoi Diagram andGenetic AlgorithmP.Q. Miao, Q.B. Meng, Y. Li and Q.B. Tu (3515)Optimal Design of Transmission Line Route Based on GISY. Wang, W. Huang, Y. Li, Q.B. Tu and X. Tain (3522)A Control Method to Suppress Resonance and Improve Current Quality for Inverter Systemwith LCL FilterY.P. Lin, S. Tao, X.N. Xiao and M.R. Wu (3528)Charge and Discharge Protection Circuit of a Mobile Power Supply ImprovementS.G. Li, L.Z. Wang, Z.Z. Gao, X.J. Zhang and L.N. Zhao (3534)Risk Assessment of Power Transformer Life Cycle Cost Based on ExtensibleMatter-Element ModelG.H. Qiao, X.J. Guo, L.M. Wu, H.L. Liu, Z. Ren and N. Bai (3538)A New Method for Power System Transient Stability Assessment: Application of AdaptiveCombined ClassifiersS. Wei, B. Wang, D.C. Liu and J.H. Luo (3542)Influence of Moisture on the Space Charge Migration and Electric Field Behavior inOil-Paper InsulationJ. Fu, J. Hao, H. Yin, G.L. Wu and Q. Wang (3548)Intelligent Four-Probe Resistivity Meter Based on MCUJ.Z. Huo (3552)Routing Selection for Communication of Power System Wide-Area Protection ConsideringBackup PathX.W. Sun (3556)A Novel Broadband Vibration Energy HarvesterY. Liu, X.Y. He, S. Liu, Y. Wu and Y. Ou (3560)Equivalent Circuit of a Planar Transformer Used for TWTAB. Zhao and G. Wang (3564)A Reconfigurable Radix-r FFT Hardware Structure DesignY.X. Zhang, H.P. Zhao and J.Y. Yu (3568)One Kind of Band-Gap Voltage Reference Source with Piecewise High-Order Temperature Compensation and Power Supply Rejection RatioZ.D. Li and L. Xie (3575)Evaluation of Power System Black-Start Schemes Based on Improved DEA/AHPEvaluation ModelC.G. Shi and T. Liu (3579)A TDC Based BIST Scheme for Operational AmplifierJ. Yuan and W. Wang (3583)Design and Simulation of Arrayed Waveguide Grating for Miniature Raman Spectrometer Y.C. Xu, Q.N. Wang and W.Z. Zhu (3588)The Electromagnetic Parameters' Impact of λ/4 Type Dielectric Absorber onAbsorbing PropertiesH.C. Zhao, W.J. Hao, Y.Y. Yi, Y.F. Dong and X.D. Yu (3593)Ballistic Effect and Application in Circuit Design of Wide Band-Gap Semiconductor X.X. Liang, Z.Q. Cheng and M.S. Jia (3597)Design of Programmable DC Power Supply Based on ARMX. Wang, H. Chen and R. Wang (3601)Research on System Integration Technology for Operation & Maintenance Automation Systemof CSG EHV Power Transmission CompanyZ.Z. Zhou, X.Y. Chen and M. Sun (3605)Adaptive Sliding Mode Output Synchronization Tracking for Hyper-Chaotic Lü System Basedon Adaptive PWL FiltersY.B. Zhao, X.Z. Zhang and X.Y. Sun (3610)Steam Generator Water Level Intelligent Control of PWR Nuclear Power Plant Based on FeedWater RegulationX.H. Yang, J. Yang, Y.N. Wang and Y. Xue (3616)Research on Application of all Time Apparent Resistivity Translation Algorithm for LargeFixed Loop TEMF.L. Li and X. Zhu (3620)The ECG Data Storage System Design Based on SD Card and Reliability AnalysisY.L. Zhu and Y.D. Wang (3625)Danger Classes Detection System Design of High Voltage Transmission Conductor Galloping Y.F. Wang and L.L. Liu (3631)UHF RFID Reader DesignD.W. Xu, L.L. Deng and S. Ren (3635)A New Type of Lead Sealing for Electric Energy Meter Packaged on the SpotX.Z. Hou, H. Yan, L. Feng and D. Wei (3639)Design Based on PLC Programming Control De-Dust SystemG.Q. Wang (3643)Circuit Design for an Intelligent Dustbin Controlled by GesturesH.C. Zhou (3647)A New Perspective on ECL CircuitsR.B. Hu, S.T. Zhou, G.B. Chen, D.B. Fu and X.Y. Zhang (3651)Practicability Discussion and Verification of Using FPGA to NAND FlashM. Yang, K. Xu and X.F. Zhang (3655)Research & Development of Three-Phase Full - Controlled Bridge Rectification CircuitsExperiment Device Based on TC787Y. She (3659)A 14-Bit Pipeline ADC Behavior Model Using Verilog-A for SOCW. Liao, L.C. Lei and X.D. Zhou (3663)Applicability Analysis of PTN Technology in Henan Electric Power Transmission Network Y. Yang, J.X. Lv, S.W. Wang, P.L. Cai and W.C. Li (3667)The Researches on the Construction of the Management in Integrated Electric PowerCommunication Network SystemY. Yang, J.X. Lv, L. Sheng, Y. Sun and X.C. Zhao (3671)。
西莫-IQ Power静电中和系统说明书
Industrial Static Control STATIC NEUTRALIZING SYSTEM WITH SENSOR TECHNOLOGY IQ PowerWWW.SIMCO-ION.COMThe IQ Power Static Neutralizing System is an unparalleled lineup engineered to include our IQ Easy sensor technology, bringing ultimate monitoring intelligence with a user friendly interface. Designed for use in a wide array of industrialapplications and leveraging many patented features, the IQ Power system provides exceptional ionization performance.This fully integrated system makes installation a snap. No complicated software to install or maintain. With our “smart addressing” technology, devices can be added in a snap.Incorporating the latest in ionization technology, the IQ Power Control Station is equipped with a full color touch panel interface. The Control Station allows the user Our Most Advanced Static Neutralizing System Just Got IQ PowerThe full IQ Power system is also available and approved for hazardous location installations, Class 1, Div 1.• O perating Voltage: 7 kV• IQ Power or Easy Configuration • Duralloy TM or Tungsten Emitters • O perating Voltage: 9 kV• IQ Power or Easy Configuration • Duralloy TM Emitters • O perating Voltage: 12 kV • IQ Power Configuration • Duralloy TM EmittersNeutralizing BarsUnlike older technology bars, IQ Power and IQ Easy static neutralizing bars are highly efficient with 100% effective length. Our neutralizing bars are shockless, DC powered and built for long lasting durability and little maintenance.They are offered in over 85 different lengths and three varieties to suit your application based on the web speeds or operating distance. All bars include rugged mounting hardware.•S peed Static Bars approximately 4” from the material to be neutralized. Our Easy bar design includes an integrated high voltage supply IQ Power Static BarSensor BarIQ Easy Sensor Bar is an active multi-point sensor bar that offers stand-alone monitoring or closed-loop feedbackfunctionality that work in conjunction with our static neutralizing bars. It adjusts as needed in real time to ensure you are receiving the lowest possible residual charge.The unique design allows for various configurations, giving you the ability to position the sensors across the target to receive a complete understanding of any electrostatic charge issues unique to your application. • Full web width charge monitoring • Over 40 bar configurations available • Individual sensor readings• User selectable specific sensors for closed-loop feedbackOur exclusive Duralloy TMemitter pin material is long lasting, resulting in higher efficiency and a greater quantity of ions, making this a reliable choice.IQ Easy Sensor BarSensor ModuleControl StationThe core of the IQ Power System is the Control Station which includes a full color touch screen designed with an intuitive interface and user-friendly features that help you monitor and control the system globally or by device.The Control Station provides information you can rely on such as; operating details of each device. Device details include system name, status, output and current. Also shown are upstream and sensor bar data for operator safety and verification.The Control Station offers upstream and downstream charge readings when used in conjunction with the IQ Easy Sensor Bar. Using the Sensor Bar allows the output of the power supply to be adjusted dynamically resulting in optimized static neutralization. An optional web speed encoder can provide automatic web speed readings if desired.The Control Station incorporates several relay output choices to suit desired alarm methods for streamlined operation and maximum productivity. Global relays as well as individual IQ Power BPS relays are accessible for both warning and fault user selectable alarm thresholds.Our “Smart Addressing” automatically assigns addresses to devices as you add them to the system, eliminating the need to manually set the address for each device.IQ Power BPS and IQ Power Static Neutralizing BarIQ Easy Sensor BarIQ Easy Static Neutralizing Bar IQ Power Static Neutralizing Bar paired w/ IQ Easy Sensor BarIQ Easy Static Neutralizing Bar paired w/ IQ Easy Sensor BarGreen: Device is operational and runningYellow: Device/parameter warning (i.e., cleaning is required)Red: Device/parameter fault or has exceed the alarm levelGrey: No device is connected or device is in standby modeThe Control Station’s color coordinated icons and output readings are designed to notify the operator of the device status. Instant, live operating conditions of all connected neutralizing and monitoring devices are available.Sensor Bar ReadingsOverall average and individual sensor readings are available via the IQ Power Control Station. Data from individual sensors can be used togenerate fault or warning conditions.Output ModesThe Control Station provides four Output Modes of operation to manage the output ionization:• F ixed Mode for system optimization based on standard charge conditions.• A uto-tune Mode a patented feature for optimization based on varied charge conditions.• M anual Mode for user adjusted output settings.•C losed-loop Feedback (CLFB) Mode allows the IQ Easy Sensor bar to directly control output. In CLFB mode, this system offers the most precise static neutralization.Four Connected DevicesSix Connected DevicesEight Connected DevicesControl Station ScreensThe Control Station’s home screen changes based on the amount of connected devices. Below are examples of the homescreen when multiple devices are connected, each with a device status indicated by color.IQ Power BPSThe IQ Power BPS power supply is an industrial powerhouse that provides patented one touch calibration, and fullionization output readings. No fumbling with pots or trying to figure out if your bar is even working.With 24 VDC input power, the system installs easily with low voltage connections. With clearly displayed power, clean bar, fault and communication indicators there’s no guesswork required. The patented connector system automatically senses bar type to adjust frequency andvoltage. No configuration required.Power InHigh Voltage ConnectorAlarm OutputCommunicationsConnection SystemData On-DemandAs we all know, static can be an invisible threat, therefore having charge condition information at your disposal is sometimes required. The IQ Power Control Station combines data logging with user selectable time interval data points in addition to automatic event logging capabilities. Couple that with simplified data retrieving methods via USB or FTP for ultimate convenience.In installations where a machine system is in place, the IQ Power’s Communication Module provides simplified full PLC integration with various protocols available.Control Station ConnectionsPower In Fault or Warning Relays Ethernet ConnectionIQ Power NetworkThe IQ Power System can monitor up to ten devices in one complete network through the touch screen Control Station. Numerous configurations are available with this system.。
高等流体力学

L
L
Note :
m (1 m 2 ) 12 ~ ln 2 L 2 ln L const . ln L L v (b cos n sin ) b ln const . 2 4
a
0
u ,v y x v u 2 x y 1 d d r 0 r dr dr ra ra
when when
r a ,1
4 C1 0 , C2 0
r 2 C1 ln r C2
r 2 v 2 a 2 r (r a) (r a)
(r a) (r a)
v
r
a
3. Hill’s Spheric Vortex Axisymmetric Flow
vz 0 , vr 0 , v 0 ( 0 , 0 , )
Consider a vortex line
1 2 2 2 2 Kr (r z a ) 10 Velocity at the surface of sphere: v (v v )
2 r 2 z 1 2 r a
K ar 5
Inviscid Fluid round a Sphere: 3 r v U 2 a 15 U K 2 2 a
s const and 2 rds const const K r
vr v z z r Introduce stokes streamfunction 1 1 vz , vr r r r z 2 2 1 1 1 2 2 2 r z r r r r
L2_Kinematics_and_Dynamics
1
Kinematics Definition
• Kinematics: The study of motion in space • Assume:
(without regard to the forces which cause it)
A
B
• Points with right-hand Frames • Rigid-bodies in 3D-space (6-dof) • 1-dof joints: Rotary (R) or Prismatic (P) (5 constraints)
• There isn t a unique method of specifying the angles
that define these transformations
Slide 14
MTRX4700 Experimental Robotics Kinematics
7
Position and Orientation [7]
The orientation of frame {B} relative to coordinate frame {A}
• Columns are {B} written in {A}
Slide 11
MTRX4700 Experimental Robotics Kinematics
Position and Orientation [3]
• • • • • • steering (control, simulation) perception (image formation) sensor head and communication antenna pointing world modelling (maps, object models) terrain following (control feedforward) gait control of legged vehicles
数学英文论文

070451 Controlling chaos based on an adaptive nonlinear compensatingmechanism*Corresponding author,Xu Shu ,email:123456789@Abstract The control problems of chaotic systems are investigated in the presence of parametric u ncertainty and persistent external distu rbances based on nonlinear control theory. B y designing a nonlinear compensating mechanism, the system deterministic nonlinearity, parametric uncertainty and disturbance effect can be compensated effectively. The renowned chaotic Lorenz system subject to parametric variations and external disturbances is studied as an illustrative example. From Lyapu nov stability theory, sufficient conditions for the choice of control parameters are derived to guarantee chaos control. Several groups of experiments are carried out, including parameter change experiments, set-point change experiments and disturbance experiments. Simulation results indicate that the chaotic motion can be regulated not only to stead y states but also to any desired periodic orbits with great immunity to parametric variations and external distu rbances.Keywords: chaotic system, nonlinear compensating mechanism, Lorenz chaotic systemPACC: 05451. IntroductionChaotic motion, as the peculiar behavior in deterministic systems, may be undesirable in many cases, so suppressing such a phenomenon has been intensively studied in recent years. Generally speaking chaos suppression and chaos synchronization[1-4 ]are two active research fields in chaos control and are both crucial in application of chaos. In the following letters we only deal with the problem of chaos suppression and will not discuss the chaos synchronization problem.Since the early 1990s, the small time-dependent parameter perturbation was introduced by Ott,Grebogi, and Y orke to eliminate chaos,[5]many effective control methods have been reported in various scientific literatures.[1-4,6-36,38-44,46] There are two lines in these methods. One is to introduce parameter perturbations to an accessible system parameter, [5-6,8-13] the other is to introduce an additive external force to the original uncontrolled chaotic system. [14-37,39-43,47] Along the first line, when system parameters are not accessible or can not be changed easily, or the environment perturbations are not avoided, these methods fail. Recently, using additive external force to achieve chaos suppression purpose is in the ascendant. Referring to the second line of the approaches, various techniques and methods have been proposed to achieve chaos elimination, to mention only a few:(ⅰ) linear state feedback controlIn Ref.[14] a conventional feedback controller was designed to drive the chaotic Duffing equation to one of its inherent multiperiodic orbits.Recently a linear feedback control law based upon the Lyapunov–Krasovskii (LK) method was developed for the suppression of chaotic oscillations.[15]A linear state feedback controller was designed to solve the chaos control problem of a class of new chaotic system in Ref.[16].(ⅱ) structure variation control [12-16]Since Y u X proposed structure variation method for controlling chaos of Lorenz system,[17]some improved sliding-mode control strategies were*Project supported by the National Natural Science Foundation of C hina (Grant No 50376029). †Corresponding au thor. E-mail:zibotll@introduced in chaos control. In Ref.[18] the author used a newly developed sliding mode controller with a time-varying manifold dynamic to compensate the external excitation in chaotic systems. In Ref.[19] the design schemes of integration fuzzy sliding-mode control were addressed, in which the reaching law was proposed by a set of linguistic rules. A radial basis function sliding mode controller was introduced in Ref.[20] for chaos control.(ⅲ) nonlinear geometric controlNonlinear geometric control theory was introduced for chaos control in Ref.[22], in which a Lorenz system model slightly different from the original Lorenz system was studied considering only the Prandtl number variation and process noise. In Ref.[23] the state space exact linearization method was also used to stabilize the equilibrium of the Lorenz system with a controllable Rayleigh number. (ⅳ)intelligence control[24-27 ]An intelligent control method based on RBF neural network was proposed for chaos control in Ref.[24]. Liu H, Liu D and Ren H P suggested in Ref.[25] to use Least-Square Support V ector Machines to drive the chaotic system to desirable points. A switching static output-feedback fuzzy-model-based controller was studied in Ref.[27], which was capable of handling chaos.Other methods are also attentively studied such as entrainment and migration control, impulsive control method, optimal control method, stochastic control method, robust control method, adaptive control method, backstepping design method and so on. A detailed survey of recent publications on control of chaos can be referenced in Refs.[28-34] and the references therein.Among most of the existing control strategies, it is considered essentially to know the model parameters for the derivation of a controller and the control goal is often to stabilize the embedded unstable period orbits of chaotic systems or to control the system to its equilibrium points. In case of controlling the system to its equilibrium point, one general approach is to linearize the system in the given equilibrium point, then design a controller with local stability, which limits the use of the control scheme. Based on Machine Learning methods, such as neural network method[24]or support vector machine method,[25]the control performance often depends largely on the training samples, and sometimes better generalization capability can not be guaranteed.Chaos, as the special phenomenon of deterministic nonlinear system, nonlinearity is the essence. So if a nonlinear real-time compensator can eliminate the effect of the system nonlinearities, chaotic motion is expected to be suppressed. Consequently the chaotic system can be controlled to a desired state. Under the guidance of nonlinear control theory, the objective of this paper is to design a control system to drive the chaotic systems not only to steady states but also to periodic trajectories. In the next section the controller architecture is introduced. In section 3, a Lorenz system considering parametric uncertainties and external disturbances is studied as an illustrative example. Two control schemes are designed for the studied chaotic system. By constructing appropriate L yapunov functions, after rigorous analysis from L yapunov stability theory sufficient conditions for the choice of control parameters are deduced for each scheme. Then in section 4 we present the numerical simulation results to illustrate the effectiveness of the design techniques. Finally some conclusions are provided to close the text.2. Controller architectureSystem differential equation is only an approximate description of the actual plant due to various uncertainties and disturbances. Without loss of generality let us consider a nonlinear continuous dynamic system, which appears strange attractors under certain parameter conditions. With the relative degree r n(n is the dimension of the system), it can be directly described or transformed to the following normal form:121(,,)((,,)1)(,,,)(,,)r r r z z z z za z v wb z v u u d z v u u vc z v θθθθθθθθ-=⎧⎪⎪⎪=⎪=+∆+⎨⎪ ++∆-+⎪⎪ =+∆+⎪=+∆⎩ (1) 1y z =where θ is the parameter vector, θ∆ denotes parameter uncertainty, and w stands for the external disturbance, such that w M ≤with Mbeingpositive.In Eq.(1)1(,,)T r z z z = can be called external state variable vector,1(,,)T r n v v v += called internal state variable vector. As we can see from Eq.(1)(,,,,)(,,)((,,)1)d z v w u a z v w b z v uθθθθθθ+∆=+∆+ ++∆- (2)includes system nonlinearities, uncertainties, external disturbances and so on.According to the chaotic system (1), the following assumptions are introduced in order to establish the results concerned to the controller design (see more details in Ref.[38]).Assumption 1 The relative degree r of the chaotic system is finite and known.Assumption 2 The output variable y and its time derivatives i y up to order 1r -are measurable. Assumption 3 The zero dynamics of the systemis asymptotically stable, i.e.,(0,,)v c v θθ=+∆ is asymptotically stable.Assumption 4 The sign of function(,,)b z v θθ+∆is known such that it is always positive or negative.Since maybe not all the state vector is measurable, also (,,)a z v θθ+∆and (,,)b z v θθ+∆are not known, a controller with integral action is introduced to compensate theinfluenceof (,,,,)d z v w u θθ+∆. Namely,01121ˆr r u h z h z h z d------ (3) where110121112100ˆr i i i r r r r i i ii r i i d k z k k k z kz k uξξξ-+=----++-==⎧=+⎪⎪⎨⎪=----⎪⎩∑∑∑ (4)ˆdis the estimation to (,,,,)d z v w u θθ+∆. The controller parameters include ,0,,1i h i r =- and ,0,,1i k i r =- . Here011[,,,]Tr H h h h -= is Hurwitz vector, such that alleigenvalues of the polynomial121210()rr r P s s h sh s h s h --=+++++ (5)have negative real parts. The suitable positive constants ,0,,1i h i r =- can be chosen according to the expected dynamic characteristic. In most cases they are determined according to different designed requirements.Define 1((,,))r k sign b z v θμ-=, here μstands for a suitable positive constant, and the other parameters ,0,,2i k i r =- can be selected arbitrarily. After011[,,,]Tr H h h h -= is decided, we can tune ,0,,1i k i r =- toachievesatisfyingstaticperformances.Remark 1 In this section, we consider a n-dimensional nonlinear continuous dynamic system with strange attractors. By proper coordinate transformation, it can be represented to a normal form. Then a control system with a nonlinear compensator can be designed easily. In particular, the control parameters can be divided into two parts, which correspond to the dynamic characteristic and the static performance respectively (The theoretic analysis and more details about the controller can be referenced to Ref.[38]).3. Illustrative example-the Lorenz systemThe Lorenz system captures many of the features of chaotic dynamics, and many control methods have been tested on it.[17,20,22-23,27,30,32-35,42] However most of the existing methods is model-based and has not considered the influence ofpersistent external disturbances.The uncontrolled original Lorenz system can be described by112121132231233()()()()x P P x P P x w x R R x x x x w xx x b b x w =-+∆++∆+⎧⎪=+∆--+⎨⎪=-+∆+⎩ (6) where P and R are related to the Prendtl number and Rayleigh number respectively, and b is a geometric factor. P ∆, R ∆and b ∆denote the parametric variations respectively. The state variables, 1x ,2x and 3x represent measures of fluid velocity and the spatial temperature distribution in the fluid layer under gravity , and ,1,2,3i w i =represent external disturbance. In Lorenz system the desired response state variable is 1x . It is desired that 1x is regulated to 1r x , where 1r x is a given constant. In this section we consider two control schemes for system (6).3.1 Control schemes for Lorenz chaotic system3.1.1 Control scheme 1The control is acting at the right-side of the firstequation (1x), thus the controlled Lorenz system without disturbance can be depicted as1122113231231x Px Px u xRx x x x x x x bx y x =-++⎧⎪=--⎨⎪=-⎩= (7) By simple computation we know system (7) has relative degree 1 (i.e., the lowest ordertime-derivative of the output y which is directly related to the control u is 1), and can be rewritten as1122113231231z Pz Pv u vRz z v v v z v bv y z =-++⎧⎪=--⎨⎪=-⎩= (8) According to section 2, the following control strategy is introduced:01ˆu h z d=-- (9) 0120010ˆ-d k z k k z k uξξξ⎧=+⎪⎨=--⎪⎩ (10) Theorem 1 Under Assumptions 1 toAssumptions 4 there exists a constant value *0μ>, such that if *μμ>, then the closed-loop system (8), (9) and (10) is asymptotically stable.Proof Define 12d Pz Pv =-+, Eq.(8) can be easily rewritten as1211323123z d u v Rz z v v vz v bv =+⎧⎪=--⎨⎪=-⎩ (11) Substituting Eq.(9) into Eq.(11) yields101211323123ˆz h z d dv R z z v v v z v bv ⎧=-+-⎪=--⎨⎪=-⎩ (12) Computing the time derivative of d and ˆdand considering Eq.(12) yields12011132ˆ()()dPz Pv P h z d d P Rz z v v =-+ =--+- +-- (13) 0120010000100ˆ-()()ˆ=()d k z k k z k u k d u k d k z k d d k dξξξ=+ =--++ =-- - = (14)Defining ˆdd d =- , we have 011320ˆ()()dd d P h P R z P z v P v P k d=- =+- --+ (15) Then, we can obtain the following closed-loop system101211323123011320()()z h z dvRz z v v v z v bv d Ph PR z Pz v Pv P k d⎧=-+⎪=--⎪⎨=-⎪⎪=+---+⎩ (16) To stabilize the closed-loop system (16), a L yapunovfunction is defined by21()2V ςς=(17)where, ςdenotes state vector ()123,,,Tz v v d, isthe Euclidean norm. i.e.,22221231()()2V z v v dς=+++ (18) We define the following compact domain, which is constituted by all the points internal to the superball with radius .(){}2222123123,,,2U z v v d zv v dM +++≤(19)By taking the time derivative of ()V ςand replacing the system expressions, we have11223322*********01213()()(1)V z z v v v v dd h z v bv k P d R z v P R P h z d P v d P z v d ς=+++ =----++ +++-- (20) For any ()123,,,z v v d U ∈, we have: 222201230120123()()(1)V h z v b v k P dR z v PR Ph z d P v d d ς≤----+ ++++ ++ (21)Namely,12300()(1)22020V z v v dPR Ph R h R P ς⎡⎤≤- ⎣⎦++ - 0 - - 1 - 2⨯00123(1)()2Tb PR Ph P k P z v v d ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥0 ⎢⎥2⎢⎥++⎢⎥- - - +⎢⎥⎣22⎦⎡⎤⨯ ⎣⎦(22) So if the above symmetrical parameter matrix in Eq.(22) is positive definite, then V is negative and definite, which implies that system (16) is asymptotically stable based on L yapunov stability theory.By defining the principal minor determinants of symmetrical matrix in Eq.(22) as ,1,2,3,4i D i =, from the well-known Sylvester theorem it is straightforward to get the following inequations:100D h => (23)22004RD h =-> (24)23004R b D bh =-> (25)240302001()(1)(2)821[2(1)]08P M D k P D b PR Ph PR D Pb Ph R PR Ph =+-+++--+++>(26)After 0h is determined by solving Inequalities (23) to (25), undoubtedly, the Inequalities (26) can serve effectively as the constraints for the choice of 0k , i.e.20200031(1)(2)821[2(1)]8P M b PR Ph PR D Pb Ph R PR Ph k P D ++++ ++++>- (27)Here,20200*31(1)(2)821[2(1)]8P M b PR Ph PR D Pb Ph R PR Ph P D μ++++ ++++=-.Then the proof of the theorem 1 is completed. 3.1.2 Control scheme 2Adding the control signal on the secondequation (2x ), the system under control can be derived as112211323123x P x P x x R x x x x u xx x bx =-+⎧⎪=--+⎨⎪=-⎩ (28) From Eq.(28), for a target constant 11()r x t x =,then 1()0xt = , by solving the above differential equation, we get 21r r x x =. Moreover whent →∞,3r x converges to 12r x b . Since 1x and 2x havethe same equilibrium, then the measured state can also be chosen as 2x .To determine u , consider the coordinate transform:122133z x v x v x=⎧⎪=⎨⎪=⎩ and reformulate Eq.(28) into the following normal form:1223121231231zRv v v z u vPz Pv v z v bv y z =--+⎧⎪=-⎨⎪=-⎩= (29) thus the controller can be derived, which has the same expression as scheme 1.Theorem 2 Under Assumptions 1, 2, 3 and 4, there exists a constant value *0μ>, such that if *μμ>, then the closed-loop system (9), (10) and (29) is asymptotically stable.Proof In order to get compact analysis, Eq.(29) can be rewritten as12123123z d u v P z P v vz v bv =+⎧⎪=-⎨⎪=-⎩ (30) where 2231d Rv v v z =--Substituting Eq.(9) into Eq.(30),we obtain:1012123123ˆz h z d dv P z P v v z v bv ⎧=-+-⎪=-⎨⎪=-⎩ (31) Giving the following definition:ˆdd d =- (32) then we can get22323112123212301()()()()dRv v v v v z R Pz Pv Pz Pv v v z v bv h z d =--- =--- ----+ (33) 012001000ˆ-()d k z k k z k u k d u k dξξ=+ =--++ = (34) 121232123010ˆ()()()(1)dd d R Pz Pv Pz Pv v v z v bv h z k d=- =--- --+-+ (35)Thus the closed-loop system can be represented as the following compact form:1012123123121232123010()()()(1)zh z d v Pz Pv v z v bv d R Pz Pv Pz Pv v v z v bv h z k d⎧=-+⎪⎪=-⎪=-⎨⎪=---⎪⎪ --+-+⎩(36) The following quadratic L yapunov function is chosen:21()2V ςς=(37)where, ςdenotes state vector ()123,,,Tz v v d , is the Euclidean norm. i.e.,22221231()()2V z v v dς=+++ (38) We can also define the following compact domain, which is constituted by all the points internalto the super ball with radius .(){}2222123123,,,2U z v v d zv v dM =+++≤ (39)Differentiating V with respect to t and using Eq.(36) yields112233222201230011212322321312()(1)(1)()V z z v v v v dd h z P v bv k dP R h z d P z v z v v P b v v d P v d P z v d z v d ς=+++ =----+ +++++ ++--- (40)Similarly, for any ()123,,,z v v d U ∈, we have: 2222012300112133231()(1)(1)(2V h z P v b v k dPR h z d P z v v P b d P v d d M z dς≤----+ +++++ ++++ + (41)i.e.,12300()(12)22V z v v dPR M h P h P Pς⎡⎤≤- ⎣⎦+++ - -2 - 0 ⨯ 001230(12)(1)2TP b PR M h P k z v v d ⎡⎤⎢⎥⎢⎥⎢⎥ - ⎢⎥⎢⎥⎢⎥ ⎢⎥22⎢⎥⎢⎥ +++ - - -+⎢⎥⎣22⎦⎡⎤⨯ ⎣⎦(42) For brevity, Let1001(12)[(222)82(23)]P PR M h b PR P h M P b α=++++++ ++(43) 2201[(231)(13)]8P M P b b PR h α=+-+++ (44)230201(2)[2(12)8(2)(4)]PM P b P P PR M h P b Ph P α=++ +++ ++- (45)Based on Sylvester theorem the following inequations are obtained:100D h => (46)22004PD h P =-> (47)3202PMD bD =-> (48)403123(1)0D k D ααα=+---> (49)where,1,2,3,4i D i =are the principal minordeterminants of the symmetrical matrix in Eq.(42).*0k μ>*12331D αααμ++=- (50)The theorem 2 is then proved.Remark 2 In this section we give two control schemes for controlling chaos in Lorenz system. For each scheme the control depends on the observed variable only, and two control parameters are neededto be tuned, viz. 0h and 0k . According to L yapunov stability theory, after 0h is fixed, the sufficient condition for the choice of parameter 0k is also obtained.4. Simulation resultsChoosing 10P =,28R =, and 8/3b =, the uncontrolled Lorenz system exhibits chaotic behavior, as plotted in Fig.1. In simulation let the initial values of the state of thesystembe 123(0)10,(0)10,(0)10x x x ===.x1x 2x1x 3Fig.1. C haotic trajectories of Lorenz system (a) projected on12x x -plane, (b) projected on 13x x -plane4.1 Simulation results of control the trajectory to steady stateIn this section only the simulation results of control scheme 2 are depicted. The simulation results of control scheme 1 will be given in Appendix. For the first five seconds the control input is not active, at5t s =, control signal is input and the systemtrajectory is steered to set point2121(,,)(8.5,8.5,27.1)T Tr r r x x x b =, as can be seen inFig.2(a). The time history of the L yapunov function is illustrated in Fig.2(b).t/sx 1,x 2,x 3t/sL y a p u n o v f u n c t i o n VFig.2. (a) State responses under control, (b) Time history of the Lyapunov functionA. Simulation results in the presence ofparameters ’ changeAt 9t s =, system parameters are abruptly changed to 15P =,35R =, and 12/3b =. Accordingly the new equilibrium is changedto 2121(,,)(8.5,8.5,18.1)T Tr r r x x x b =. Obviously, aftervery short transient duration, system state converges to the new point, as shown in Fig.3(a). Fig.4(a) represents the evolution in time of the L yapunov function.B. Simulation results in the presence of set pointchangeAt 9t s =, the target is abruptly changedto 2121(,,)(12,12,54)T Tr r r x x x b =, then the responsesof the system state are shown in Fig.3(b). In Fig.4(b) the time history of the L yapunov function is expressed.t/sx 1,x 2,x 3t/sx 1,x 2,x 3Fig.3. State responses (a) in the presence of parameter variations, (b) in the presence of set point changet/sL y a p u n o v f u n c t i o n Vt/sL y a p u n o v f u n c t i o n VFig.4. Time history of the Lyapunov fu nction (a) in the presence of parameter variations, (b) in the presence of set point changeC. Simulation results in the presence ofdisturbanceIn Eq.(5)external periodic disturbance3cos(5),1,2,3i w t i π==is considered. The time responses of the system states are given in Fig.5. After control the steady-state phase plane trajectory describes a limit cycle, as shown in Fig.6.t/sx 1,x 2,x 3Fig.5. State responses in the presence of periodic disturbancex1x 3Fig.6. The state space trajectory at [10,12]t ∈in the presence ofperiodic disturbanceD. Simulation results in the presence of randomnoiseUnder the influence of random noise,112121132231233xPx Px x Rx x x x u xx x bx εδεδεδ=-++⎧⎪=--++⎨⎪=-+⎩ (51) where ,1,2,3i i δ= are normally distributed withmean value 0 and variance 0.5, and 5ε=. The results of the numerical simulation are depicted in Fig.7,which show that the steady responses are hardly affected by the perturbations.t/sx 1,x 2,x 3t/se 1,e 2,e 3Fig.7. Time responses in the presence of random noise (a) state responses, (b) state tracking error responses4.2 Simulation results of control the trajectory to periodic orbitIf the reference signal is periodic, then the system output will also track this signal. Figs.8(a) to (d) show time responses of 1()x t and the tracking trajectories for 3-Period and 4-period respectively.t/sx 1x1x 2t/sx 1x1x 2Fig.8. State responses and the tracking periodic orbits (a)&( b)3-period, (c)&(d) 4-periodRemark 3 The two controllers designed above solved the chaos control problems of Lorenz chaoticsystem, and the controller design method can also beextended to solve the chaos suppression problems of the whole Lorenz system family, namely the unified chaotic system.[44-46] The detail design process and close-loop system analysis can reference to the author ’s another paper.[47] In Ref.[47] according to different positions the scalar control input added,three controllers are designed to reject the chaotic behaviors of the unified chaotic system. Taking the first state 1x as the system output, by transforming system equation into the normal form firstly, the relative degree r (3r ≤) of the controlled systems i s known. Then we can design the controller with the expression as Eq.(3) and Eq.(4). Three effective adaptive nonlinear compensating mechanisms are derived to compensate the chaotic system nonlinearities and external disturbances. According toL yapunov stability theory sufficient conditions for the choice of control parameters are deduced so that designers can tune the design parameters in an explicit way to obtain the required closed loop behavior. By numeric simulation, it has been shown that the designed three controllers can successfully regulate the chaotic motion of the whole family of the system to a given point or make the output state to track a given bounded signal with great robustness.5. ConclusionsIn this letter we introduce a promising tool to design control system for chaotic system subject to persistent disturbances, whose entire dynamics is assumed unknown and the state variables are not completely measurable. By integral action the nonlinearities, including system structure nonlinearity, various disturbances, are compensated successfully. It can handle, therefore, a large class of chaotic systems, which satisfy four assumptions. Taking chaotic Lorenz system as an example, it has been shown that the designed control scheme is robust in the sense that the unmeasured states, parameter uncertainties and external disturbance effects are all compensated and chaos suppression is achieved. Some advantages of this control strategy can be summarized as follows: (1) It is not limited to stabilizing the embeddedperiodic orbits and can be any desired set points and multiperiodic orbits even when the desired trajectories are not located on the embedded orbits of the chaotic system.(2) The existence of parameter uncertainty andexternal disturbance are allowed. The controller can be designed according to the nominal system.(3) The dynamic characteristics of the controlledsystems are approximately linear and the transient responses can be regulated by the designer through controllerparameters ,0,,1i h i r =- .(4) From L yapunov stability theory sufficientconditions for the choice of control parameters can be derived easily.(5) The error converging speed is very fast evenwhen the initial state is far from the target one without waiting for the actual state to reach the neighborhood of the target state.AppendixSimulation results of control scheme 1.t/sx 1,x 2,x 3t/sL y a p u n o v f u n c t i o n VFig.A1. (a) State responses u nder control, (b) Time history of the Lyapunov functiont/sx 1,x 2,x 3t/sx 1,x 2,x 3Fig.A2. State responses (a) in the presence of parameter variations, (b) in the presence of set point changet/sL y a p u n o v f u n c t i o n Vt/sL y a p u n o v f u n c t i o n VFig.A3. Time history of the L yapu nov fu nction (a) in the presence of parameter variations, (b) in the presence of set point changet/sx 1,x 2,x 3Fig.A4. State responses in the presence of periodic disturbanceresponsest/sx 1,x 2,x 3Fig.A5. State responses in the presence of rand om noiset/sx 1x1x 2Fig.A6. State response and the tracking periodic orbits (4-period)References[1] Lü J H, Zhou T S, Zhang S C 2002 C haos Solitons Fractals 14 529[2] Yoshihiko Nagai, Hua X D, Lai Y C 2002 C haos Solitons Fractals 14 643[3] Li R H, Xu W , Li S 2007 C hin.phys.16 1591 [4]Xiao Y Z, Xu W 2007 C hin.phys.16 1597[5] Ott E ,Greb ogi C and Yorke J A 1990 Phys.Rev .Lett. 64 1196 [6]Yoshihiko Nagai, Hua X D, Lai Y C 1996 Phys.Rev.E 54 1190 [7] K.Pyragas, 1992 Phys. Lett. A 170 421 [8] Lima,R and Pettini,M 1990 Phys.Rev.A 41 726[9] Zhou Y F, Tse C K, Qiu S S and Chen J N 2005 C hin.phys. 14 0061[10] G .Cicog na, L.Fronzoni 1993 Phys.Rew .E 30 709 [11] Rakasekar,S. 1993 Pramana-J.Phys.41 295 [12] Gong L H 2005 Acta Phys.Sin.54 3502 (in C hinese) [13] Chen L,Wang D S 2007 Acta Phys.Sin.56 0091 (in C hinese) [14] C hen G R and Dong X N 1993 IEEE Trans.on Circuits andSystem-Ⅰ:Fundamental Theory and Applications 40 9 [15] J.L. Kuang, P.A. Meehan, A.Y.T. Leung 2006 C haos SolitonsFractals 27 1408[16] Li R H, Xu W, Li S 2006 Acta Phys.Sin.55 0598 (in C hinese) [17] Yu X 1996 Int.J.of Systems Science 27 355[18] Hsun-Heng Tsai, C hyu n-C hau Fuh and Chiang-Nan Chang2002 C haos,Solitons Fractals 14 627[19] Her-Terng Yau and C hieh-Li C hen 2006 C hao ,SolitonsFractal 30 709[20] Guo H J, Liu J H, 2004 Acta Phys.Sin.53 4080 (in C hinese) [21] Yu D C, Wu A G , Yang C P 2005 Chin.phys.14 0914 [22] C hyu n-C hau Fuh and Pi-Cheng Tu ng 1995 Phys.Rev .Lett.752952[23] Chen L Q, Liu Y Z 1998 Applied Math.Mech. 19 63[24] Liu D, R en H P, Kong Z Q 2003 Acta Phys.Sin.52 0531 (inChinese)[25] Liu H, Liu D and Ren H P 2005 Acta Phys.Sin.54 4019 (inChinese)[26] C hang W , Park JB, Joo YH, C hen GR 2002 Inform Sci 151227[27] Gao X, Liu X W 2007 Acta Phys.Sin. 56 0084 (in C hinese) [28] Chen S H, Liu J, Lu J 2002 C hin.phys.10 233 [29] Lu J H, Zhang S. 2001 Phys. Lett. A 286 145[30] Liu J, Chen S H, Xie J. 2003 C haos Solitons Fractals 15 643 [31] Wang J, Wang J, Li H Y 2005 C haos Solitons Fractals 251057[32] Wu X Q, Lu JA, C hi K. Tse, Wang J J, Liu J 2007 ChaoSolitons Fractals 31 631[33] A.L.Fradkov , R .J.Evans, 2002 Preprints of 15th IF AC W orldCongress on Automatic Control 143[34] Zhang H G 2003 C ontrol theory of chaotic systems (Shenyang:Northeastern University) P38 (in C hinese)[35] Yu-Chu Tian, Moses O.Tadé, David Levy 2002Phys.Lett.A.296 87[36] Jose A R , Gilberto E P, Hector P, 2003 Phys. Lett. A 316 196 [37] Liao X X, Yu P 2006 Chaos Solitons Fractals 29 91[38] Tornambe A, V aligi P.A 1994 Measurement, and C ontrol 116293[39] Andrew Y.T.Leung, Liu Z R 2004 Int.J.Bifurc.C haos 14 2955 [40] Qu Z L, Hu,G .,Yang,G J, Qin,G R 1995 Phys.Rev .Lett.74 1736 [41] Y ang J Z, Qu Z L, Hu G 1996 Phys.Rev.E.53 4402[42] Shyi-Kae Yang, C hieh-Li Chen, Her-Terng Yau 2002 C haosSolitons Fractals 13 767。
Compressible Fluids the discontinuity of the vorticity vector on a shock wave in thermodyna
The dot denotes the material derivative, Ω is the body force potential. We consider the two quantities ϕ(t, X) and ψ (t, X) (denoted potentials) such that ϕ ˙ = β (t, X), ˙ = γ (t, X). ψ (11) (12)
roto is the rotational on Do (see reference[4]). The discontinuity of the vorticity vector comes from to parts: one part comes from the discontinuity of its image roto Co T , and the other part comes from the discontinuity of the Jacobian F .
3
Discontinuity of the Jacobian F
∂ z/∂ Z is a linear mapping transforming any tangent vector to So (t) in a tangent vector to S (t). If we denote by no ′ = −no /go, we obtain: F1 F2 = nT u1 u2
Compressible Fluids: The discontinuity of the vorticity vector on a shock wave in thermodynamical variables
arXiv:0805.0073v1 [physics.class-ph] 1 May 2008
外文翻译
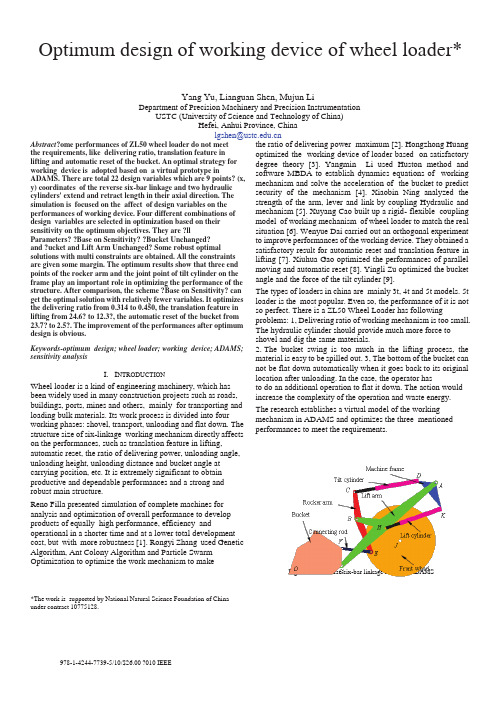
The types of loaders in china are mainly 3t, 4t and 5t models. 5t loader is the most popular. Even so, the performance of it is not so perfect. There is a ZL50 Wheel Loader has following problems: 1, Delivering ratio of working mechanism is too small. The hydraulic cylinder should provide much more force to shovel and dig the same materials. 2. The bucket swing is too much in the lifting process, the material is easy to be spilled out. 3, The bottom of the bucket can not be flat down automatically when it goes back to its original location after unloading. In the case, the operator has to do an additional operation to flat it down. The action would increase the complexity of the operation and waste energy. The research establishes a virtual model of the working mechanism in ADAMS and optimizes the three mentioned performances to meet the requirements.
光纤光栅应变传感在扭振测量中的应用

光纤光栅应变传感在扭振测量中的应用魏莉,刘芹,王兢兢,陈宇佳(武汉理工大学机电工程学院,湖北武汉430070)来稿日期:2019-09-16基金项目:国家自然科学青年基金项目(51405354)作者简介:魏莉,(1977-),女,湖北丹江口人,博士研究生,硕士研究生导师,副教授,主要研究方向:机械装备状态监测技术与应用等;刘芹,(1991-),女,湖北荆门人,硕士研究生,主要研究方向:旋转机械振动测量技术,光纤光栅传感技术的研究1引言在现代工业生产和制造领域中,旋转机械被广泛应用于船舶、航天、石油、化工以及冶金等领域[1]。
然而,由于系统电气、机械和负载等方面的原因使旋转机械在实际工程中故障频发,导致机械设备寿命降低,其中机械扭转振动是引起旋转机械设备故障的主要原因之一[2]。
如何准确有效地检测扭振信号对旋转机械运行状态评估有着重要的意义。
近年来,国内外学者对旋转机械扭振信号检测方法进行了深入研究,文献[3-4]将加速度传感器直接安装在转子轴上,在旋转坐标系下进行测试,实现了对转子的扭振测量;文献[6]和文献[5]通过检测齿轮反射脉冲信号测量扭振;文献[6]采用激光多普勒技术和光学外差原理,直接测量转动角加速度。
这些检测方法均取得了重大成果,但由于存在安装困难、易受电磁干扰、费用昂贵等问题,使得这些检测方法的应用局限于较单一的环境。
自1978年加拿大渥太华通信研究中文献[7]首次制成了世界上第一根光纤光栅后,各种新型光纤传感技术不断涌现。
与传统摘要:为了实现对大型旋转机械扭振的准确测量,提出了一种基于光纤布拉格光栅(Fiber Bragg Grating ,FBG )应变的扭振测量方法。
首先,根据旋转机械轴系的扭振产生机理以及光纤光栅传感技术,建立了扭振与光纤光栅的应变传递模型,进而设计了光纤光栅应变传感器。
接着,搭建了静、动态实验平台,对该传感器进行了静、动态标定实验。
最后,在机械运行状态下,对该传感器进行了动态扭振测试实验。
高低频噪声区分滤除的车辆载重动态测量方法

高低频噪声区分滤除的车辆载重动态测量方法周晓萍(聊城大学东昌学院,山东聊城252000)来稿日期:2020-01-07基金项目:山东省高等学校科技计划项目(J18KA335)作者简介:周晓萍,(1986-),女,山东蓬莱人,硕士研究生,讲师,主要研究方向:机械结构优化设计、车辆载重测量方法研究1引言随着中国道路交通网建设加速,车辆超载问题日益突出。
车辆超载不仅增加了交通事故,而且破坏了基础交通设施和环境质量[1]。
因此研究车辆载重实时检测系统,可以从源头上遏止超重问题,达到保护交通设施和环境的目的。
传统的车辆称重方式为静态称重,如地磅称,这种称重方法精度较高,但是通行率过低,容易造成拥堵。
车辆动态称重是当前研究的热点,文献[2]使用BP 神经网络将叠板弹簧形变量和胎压变化量进行信息融合,取得了较高的测量精度;文献[3]将称重技术与通信技术结合,提出了使用因特网进行信息传输的车辆动态测量系统;文献[4]基于载重量与胎压的对应关系,提出了多种方法测量车辆载重。
以上研究推动了车辆载重动态测量系统的研究,但是都没有考虑高频噪声、速度及加速度影响等,因此测量精度有限。
这里确定了车辆载重动态测量方案,分析了信号误差来源,高频噪声使用改进小波阈值方法滤出,低频误差使用BP 神经网摘要:在车辆行驶过程中,为了精确测量车辆载重,提出了高低频噪声区分滤除的车辆载重动态测量方法。
确定了车辆载重测量方案,分析了信号误差来源。
对于发动机转动、环境温度变化引起的高频噪声,提出了具有可调节参数的改进阈值小波滤波,有效减弱了信号中的高频噪声;对于速度、加速度引起的低频噪声,提出使用BP 神经网络拟合载重量与速度、加速度函数关系,以消除加速度、速度对载重测量的影响;为了解决BP 算法易陷入局部极值问题,提出自适应鱼群算法搜索神经网络最优参数。
经实验验证,改进阈值小波滤波可以有效去除高频噪声,提高了信号信噪比;提出的车辆载重测量平均误差为0.85%,最大误差为1.45%,平均误差比原始数据平均误差降低了约6倍。
云中夹卷混合过程的研究进展

引言云覆盖了地球大约2/3的面积,在天气和气候中扮演着十分重要的角色(Liou ,1986;Kummerow et al.,2000;Li et al.,2005;Chen and Yin ,2014;Zhang et al.,2017;王元等,2017;Ge et al.,2018)。
一方面,云是水循环的一个重要环节(Ramanathan et al.,2001;张学文,2002;李兴宇等,2008;赵坤等,2015;Fu et al.,2016;Zhao et al.,2017),云的生成、发展和消亡直接影响着降水的起止时间、强度和分布等,且云中释放的潜热是大气中各种尺度运动的重要能量来源之一(刘奇俊等,2003;Liu and Fu ,2010;Wang et al.,2012;Guoet al.,2015;傅云飞,2018;Li et al.,2018)。
另一方面,云在地气系统辐射收支平衡上的作用举足轻重:云会反射太阳短波辐射,在太阳短波辐射光谱范围内,对流层中下层的层状云比高层的卷云有着更大的光学厚度,在云的辐射气候效应中起到了主要作用(Wang and Key ,2005);而且云对地气系统长波辐射吸收作用很强,同时会以云顶的温度向外发射长波辐射,对地气系统起到保温作用,其中卷云又发挥了重要的作用(Zhang et al.,2013;张华等,2017)。
然而,云本身的物理过程、与太阳短波辐射以及地球长波辐射的反馈依然存在很大的不确定性。
这主要是因为这其中包含的时空尺度太过复杂,从云滴陆春松,徐晓齐.2021.云中夹卷混合过程的研究进展[J].暴雨灾害,40(3):271-279LU Chunsong,XU Xiaoqi.2021.Advances in the studies of cloud entrainment and mixing process [J].Torrential Rain and Disasters,40(3):271-279云中夹卷混合过程的研究进展陆春松,徐晓齐(南京信息工程大学中国气象局气溶胶与云降水重点开放实验室/气象灾害预报预警与评估协同创新中心,南京210044)摘要:夹卷混合过程表征了云和环境空气之间的相互作用,是云物理和动力过程中不确定性最大的过程之一。
带橡胶阻尼块压气机整流器振动特性分析
收稿日期:2020-11-24基金项目:国家科技重大专项((2017-IV-0006-0043)资助作者简介:冯晨曦(1993),男,在读硕士研究生。
引用格式:冯晨曦,漆文凯,朱银方,等.带橡胶阻尼块压气机整流器振动特性分析[J].航空发动机,2023,49(3):96-104.FENG Chenxi ,QI Wenkai ,ZHU Yinfang ,et al.Analysis of vibration characteristics of guide vanes of compressor with rubber damping block[J].Aeroengine ,2023,49(3):96-104.带橡胶阻尼块压气机整流器振动特性分析冯晨曦1,漆文凯1,朱银方2(1.南京航空航天大学能源与动力学院,南京210016;2.中国航发湖南动力机械研究所,湖南株洲412002)摘要:橡胶的动态特性及频率与应变相关。
为了研究航空发动机带橡胶阻尼块整流器叶片结构的振动特性,使用有限元仿真和试验相结合的方法,建立了适用于此结构的动态模型,分别使用硅橡胶N50、硅橡胶N60、天然橡胶N60和丁晴橡胶N60这4种橡胶阻尼块对该结构进行了试验和仿真。
对4种橡胶进行准静态拉伸试验,使用Neo-Hookean 超弹性模型进行拟合得出C NH1与最大应变εm 的3次多项式,带入ANSYS 进行橡胶柱压缩仿真从而验证模型的可靠性;对橡胶进行动刚度试验,得出橡胶动态模量随频率的增大而逐渐递增;建立非线性弹簧-分数导数模型,带入ANSYS 进行迭代计算,并进行扫频试验,对得出的不同橡胶阻尼块下叶片的第1阶共振频率的仿真结果和试验结果进行对比可知,模型的计算误差均小于5%。
综合分析表明:非线性弹簧-分数导数模型能够准确地描述带橡胶阻尼块整流器叶片结构的振动特性。
关键词:橡胶阻尼块;整流器叶片;振动特性;准静态试验;动态模量试验;非线性弹簧-分数导数模型;航空发动机中图分类号:V231.92文献标识码:Adoi :10.13477/ki.aeroengine.2023.03.012Analysis of Vibration Characteristics of Guide Vanes of Compressor with Rubber Damping BlockFENG Chen-xi 1,QI Wen-kai 1,ZHU Yin-fang 2(1.College of Energy and Power Engineering ,Nanjing University of Aeronautics and Astronautics ,Nanjing 210016,China ;2.AECC Hunan Aviation Powerplant Research Institute ,Zhuzhou Hunan 412002,China )Abstract :The dynamic characteristics and frequencies of rubber are related to its strain.In order to study the vibration characteristics of aeroengine guide vanes structure with rubber damping blocks ,a dynamic model of the structure was established by the method of finite element simulation and experiment.The structure was tested and simulated with four kinds of rubber damping blocks ,namely silicone rub⁃ber N50,silicone rubber N60,natural rubber N60and NBR N60.Quasi-static tensile tests were performed on the four kinds of rubbers ,and the Neo-Hookean hyperelastic constitutive model was used for data fitting to obtain the cubic polynomial of C NH1with respect to themaximum strain εm ,and ANSYS was used to simulate the compression of the rubber column to verify the reliability of the model.The dy⁃namic stiffness tests of rubber show that the dynamic modulus of rubber increases gradually with the increase of frequency.A fractional de⁃rivative model was established and brought into ANSYS for iterative calculation ,and frequency sweep tests were carried out.By comparing the simulation results and test results of the first resonant frequency of the vanes with different rubber damping blocks ,it can be seen thatthe calculation error of the model is less than 5%.The comprehensive analysis shows that the nonlinear spring-fractional derivative model can accurately describe the vibration characteristics of the guide vane structure with rubber damping blocks.Key words :rubber damping block;guide vanes;vibration characteristics;quasi-static test;dynamic modulus test;nonlinear spring-fractional derivative model;aeroengine航空发动机Aeroengine0引言随着航空发动机的迅速发展,对发动机性能的要求越来越高。
Stability and Turbulence
1 Áwa wa (» ) = 2¼ ©wa wa (-) Ω = Z
Fourier Integral Representation
It is often assumed that wa (x) is a sample function from an ergodic random process [Bendat and Piersol, 1966]. An important measure associated with such sample functions is the autocorrelation function, defined as
Hess, R. A. “Stability and Turbulence” The Engineering Handbook. Ed. Richard C. Dorf Boca Raton: CRC Press LLC, 2000
© 1998 by CRC PRESS LLC
173
Stability and Turbulence
¾wa = RMS value of wa (x0 ; t) =
¢
s
1 lim T !1 2TZT ¡T 2 (x ; t) dt wa 0
(173:1)
Simplified Descriptions
Concentrating upon turbulence, it is often assumed in aircraft stability and control analyses that the statistical description of the turbulence field (e.g., the RMS velocity at a point) is not a function of time, the origin, or the orientation of the axis system used to describe the field. If, as is typically the case, the aircraft is moving through the field with a velocity that is significantly larger in magnitude than the RMS value of the turbulence velocity at any point along its path, then the
hbm t11000 测量系统 使用说明书
Introduction to HBM presentation Challenges in dynamic torque and force measurement with special regard to industrial demands for the dynamic measurement workshop held at BIPM, Paris, November 2012.by Dr.-Ing. André Schäfer, HBM, Darmstadt Germany, Collaborator in IND09 ProjectFor more than six decades we have served many branches of industry as a manufacturer of complete measuring chains from the sensor via data processing to software. The first products were amplifiers and inductive transducers. In 1955 the company started –as the first company in Europe - the production of strain gauges, marking the beginning of a big success story. Today reference transducers and precision instruments in static calibration for quantities such as force, torque and pressure are carried out with strain gauges, as this allows the smallest possible measurement uncertainty for the whole measuring chain. So it is no wonder that HBM was the first calibration laboratory in the German Calibration Service (DKD) in 1977.To cope with the new challenges we take part in several projects in the framework of EURAMET. This includes both the EMRP (European Metrology Research Programme) projects but recently also its successor, EMPIR (European Metrology Programme for Innovation and Research).What makes the EMRP project JRP IND09 Traceable Dynamic Measurements of Mechanical Quantities outstanding is its vision. Although static calibration is still the underlying reality today, the automotive industry especially is very interested in dynamic calibration research with a focus on mechanical quantities.One key issue is dynamic force and torque calibration and, in particular, considerations of varying uncertainty of measurement when using a force or a torque transducer for calibration or for a specific application. In the field of force transducers, this applies mainly for aerospace and materials testing (e.g., in material testing machines). In the field of torque, automotive and shipbuilding applications are of interest, so in-line torque measurement is required, i.e., measurement directly on the drive train of ships. Tightened regulations (e.g., for emission limits) require a substantial increase in accuracy of torque measurement. Eventually, both rotational speed measurement and power must be certified.We are well aware of the fact that the uncertainties of measurement that can be achieved with dynamic calibration will - for the time being or in principle even permanently –be markedly more significant than those already attainable with static measurements today. It is essential that expectations remain realistic but also reflect industry requirements, because what we offer is - compared to today's ignorance of these influences – is real progress and closer to the truth. Torque users in industry are primarily interested in what torque is acting on the test specimen, to what extent the measurement devices, electronics, and shaft train affect the actual loading, and how this has to be taken into account.For torque a key feature that has to be considered is that today torque transducers are mounted in a calibration machine in a non-rotating setup, while industrial users are interested in rotating conditions, so dynamic in the real application. Dynamic calibration is the logical successor of static calibration. However standards, regulations or even design rules for dedicated transducers have to be created. Thus the EMRP project helps to close the gap between the present and future demands of industry and what NMIs and suppliers can offer today.A great milestone in the project was the participation in the workshop on Challenges in Metrology for Dynamical Measurement that took place at the BIPM (Bureau International des Poids et Mesures) in November 2012. From the HBM presentation one could see that for torque and force measurement foil type strain gauge transducers are most accurate and with steel and titanium measuring body realisations one can also go up to very high force and torque values. HBM offers complete measuring chains. The workshop also addressed the difficulty that the dynamic behavior of the complete system in the application will differ much from that of the component delivered by HBM (transducer + digital acquisition systems).The main conclusion have been that measuring chain realisations at national level as well as reference transducers have to be as effective as possible and at industrial level first of all affordable. HBM pointed out that the dynamic behavior of the complete system in the application at the customer will differ greatly from that of the component delivered by HBM (the transducer). So the total system clearly has to be considered. Nevertheless the components clearly have to be understood and evaluated.We are proud to contribute to first guidelines on products and regulations for the traceability of dynamic measurements of mechanical quantities along with the final phase of EMRP JRP IND09 project. We hope that continue that contribution also to enhance our general reputation as a company driving future technology.。
moffatt’s method -回复
moffatt’s method -回复Moffatt's method is a mathematical technique used to calculate the flow velocity field in a three-dimensional fluid system. This method was developed by Keith Moffatt, a renowned mathematician and fluid dynamicist. In this article, we will delve into Moffatt's method, explaining its fundamental principles and step-by-step process. By the end, you will have a comprehensive understanding of this powerful mathematical tool.Flow velocity fields play a crucial role in fluid dynamics as they describe the motion of fluid particles within a system. Understanding the flow velocity field provides valuable insights into the fluid's behavior, such as turbulence, vorticity, and potential for heat transfer. Moffatt's method is a unique approach that allows researchers to solve for the velocity field in complex fluid systems efficiently.To begin our exploration of Moffatt's method, we must first establish a basic understanding of vorticity. Vorticity is a vector field that describes the local spinning motion of fluid particles. It is calculated as the curl of the velocity field,ω = ∇× v,where ω represents vorticity, ∇ is the Nabla operator (a vector differential operator), and v denotes the velocity field. By analyzing the vorticity, we can gain insights into the flow patterns and areas of rotation within the fluid system.Now that we have established the importance of vorticity, we can move on to the core idea behind Moffatt's method. The central concept is to express the vorticity field in terms of elementary solutions, which are simple vortices or doublets. These elementary solutions provide a basis for constructing more complex velocity fields.Moffatt's method follows a step-by-step process to achieve this goal. We will go through each step in detail.Step 1: DecompositionThe first step is to decompose the vorticity field into elementary solutions. This is done by expressing the vorticity as a sum of elementary vortices and doublets. The fundamental idea is that any flow can be approximated by a combination of theseelementary solutions.Step 2: SuperpositionNext, we superpose the elementary vortices and doublets to obtain the overall formulation of the vorticity field. This step involves integrating the individual contributions of each elementary solution. The superposition principle allows us to combine multiple solutions to form a more complex velocity field.Step 3: Application of Boundary ConditionsIn this step, we apply the appropriate boundary conditions to the vorticity field. Boundary conditions include information about the flow at the edges or surfaces of the fluid system. These conditions help constrain the solution and make it physically meaningful.Step 4: Solution for Velocity FieldOnce the vorticity field is obtained, we can solve for the velocity field. This is done by taking the curl of the vorticity field, as described earlier. The resulting velocity field contains information about the flow patterns and velocities at different points within the fluid system.Step 5: Analysis and InterpretationFinally, we analyze and interpret the obtained velocity field. This step involves studying the flow patterns, areas of high or low velocities, and any other characteristics of interest. By understanding the velocity field, we can gain insights into the behavior and dynamics of the fluid system.Moffatt's method offers a powerful and efficient approach to calculate flow velocity fields in complex fluid systems. By decomposing the vorticity field into elementary solutions and superposing them, researchers can obtain accurate and detailed information about the fluid dynamics. This method has found applications in various fields, including meteorology, oceanography, and engineering.In conclusion, Moffatt's method provides a systematic approach to solve for flow velocity fields in three-dimensional fluid systems. By decomposing the vorticity field, superposing elementary solutions, applying boundary conditions, and solving for the velocity field, researchers can gain valuable insights into the fluid's behavior. This method has proven to be exceptionally useful innumerous scientific and engineering applications, contributing to our understanding of fluid dynamics.。
关于斜拉桥的英文
Study on nonlinear analysis of a highly redundant cable-stayed bridge 1.AbstractA comparison on nonlinear analysis of a highly redundant cable-stayed bridge is performed in the study. The initial shapes including geometry and prestress distribution of the bridge are determined by using a two-loop iteration method, i.e., an equilibrium iteration loop and a shape iteration loop. For the initial shape analysis a linear and a nonlinear computation procedure are set up. In the former all nonlinearities of cable-stayed bridges are disregarded, and the shape iteration is carried out without considering equilibrium. In the latter all nonlinearities of the bridges are taken into consideration and both the equilibrium and the shape iteration are carried out. Based on the convergent initial shapes determined by the different procedures, the natural frequencies and vibration modes are then examined in details. Numerical results show that a convergent initial shape can be found rapidly by the two-loop iteration method, a reasonable initial shape can be determined by using the linear computation procedure, and a lot of computation efforts can thus be saved. There are only small differences in geometry and prestress distribution between the results determined by linear and nonlinear computation procedures. However, for the analysis of natural frequency and vibration modes, significant differences in the fundamental frequencies and vibration modes will occur, and the nonlinearities of the cable-stayed bridge response appear only in the modes determined on basis of the initial shape found by the nonlinear computation.2. IntroductionRapid progress in the analysis and construction of cable-stayed bridges has been made over the last three decades. The progress is mainly due to developments in the fields of computer technology, high strength steel cables, orthotropic steel decks and construction technology. Since the first modern cable-stayed bridge was built in Sweden in 1955, their popularity has rapidly been increasing all over the world. Because of its aesthetic appeal, economic grounds and ease of erection, thecable-stayed bridge is considered as the most suitable construction type for spans ranging from 200 to about 1000 m. The world’s longest cable-stayed bridge today is the Tatara bridge across the Seto Inland Sea, linking the main islands Honshu andShikoku in Japan. The Tatara cable-stayed bridge was opened in 1 May, 1999 and has a center span of 890m and a total length of 1480m. A cable-stayed bridge consists of three principal components, namely girders, towers and inclined cable stays. The girder is supported elastically at points along its length by inclined cable stays so that the girder can span a much longer distance without intermediate piers. The dead load and traffic load on the girders are transmitted to the towers by inclined cables. High tensile forces exist in cable-stays which induce high compression forces in towers and part of girders. The sources of nonlinearity in cable-stayed bridges mainly include the cable sag, beam-column and large deflection effects. Since high pretension force exists in inclined cables before live loads are applied, the initial geometry and the prestress of cable-stayed bridges depend on each other. They cannot be specified independently as for conventional steel or reinforced concrete bridges. Therefore the initial shape has to be determined correctly prior to analyzing the bridge. Only based on the correct initial shape a correct deflection and vibration analysis can be achieved. The purpose of this paper is to present a comparison on the nonlinear analysis of a highly redundant stiff cable-stayed bridge, in which the initial shape of the bridge will be determined iteratively by using both linear and nonlinear computation procedures. Based on the initial shapes evaluated, the vibration frequencies and modes of the bridge are examined.3. System equations3.1. General system equationWhen only nonlinearities in stiffness are taken into account, and the system mass and damping matrices are considered as constant, the general system equation of a finite element model of structures in nonlinear dynamics can be derived from the Lagrange’s virtual work principle and written as follows:K j bαj-∑S j a jα= Mαβqβ”+ Dαβqβ’3.2. Linearized system equationIn order to incrementally solve the large deflection problem, the linearized system equations has to be derived. By taking the first order terms of the Taylor’s expansion of the general system equation, the linearized equation for a small time (or load) interval is obtained as follows:MαβΔqβ”+ΔDαβqβ’ +2KαβΔqβ=Δpα- u pα3.3. Linearized system equation in staticsIn nonlinear statics, the linearized system equation becomes2KαβΔqβ=Δpα- u pα4. Nonlinear analysis4.1. Initial shape analysisThe initial shape of a cable-stayed bridge provides the geometric configuration as well as the prestress distribution of the bridge under action of dead loads of girders and towers and under pretension force in inclined cable stays. The relations for the equilibrium conditions, the specified boundary conditions, and the requirements of architectural design should be satisfied. For shape finding computations, only the dead load of girders and towers is taken into account, and the dead load of cables is neglected, but cable sag nonlinearity is included. The computation for shape finding is performed by using the two-loop iteration method, i.e., equilibrium iteration and shape iteration loop. This can start with an arbitrary small tension force in inclined cables. Based on a reference configuration (the architectural designed form), having no deflection and zero prestress in girders and towers, the equilibrium position of the cable-stayed bridges under dead load is first determined iteratively (equilibrium iteration). Although this first determined configuration satisfies the equilibrium conditions and the boundary conditions, the requirements of architectural design are, in general, not fulfilled. Since the bridge span is large and no pretension forces exist in inclined cables, quite large deflections and very large bending moments may appear in the girders and towers. Another iteration then has to be carried out in order to reduce the deflection and to smooth the bending moments in the girder and finally to find the correct initial shape. Such an iteration procedure is named here the ‘shape iteration’. For shape iteration, the element axial forces determined in the previous step will be taken as initial element forces for the next iteration, and a new equilibrium configuration under the action of dead load and such initial forces will be determined again. During shape iteration, several control points (nodes intersected by the girder and the cable) will be chosen for checking the convergence tolerance. In each shape iteration the ratio of the vertical displacement at control points to the main span lengthwill be checked, i.e.,ε<|span main points control at nt displaceme vertical | The shape iteration will be repeated until the convergence tolerance ε, say 10-4, isachieved. When the convergence tolerance is reached, the computation will stop and the initial shape of the cable-stayed bridges is found. Numerical experiments show that the iteration converges monotonously and that all three nonlinearities have less influence on the final geometry of the initial shape. Only the cable sag effect is significant for cable forces determined in the initial shape analysis, and thebeam-column and large deflection effects become insignificant.The initial analysis can be performed in two different ways: a linear and anonlinear computation procedure. 1. Linear computation procedure: To find the equilibrium configuration of the bridge, all nonlinearities of cable stayed bridges are neglected and only the linear elastic cable, beam-column elements and linear constant coordinate transformation coefficients are used. The shape iteration is carried out without considering the equilibrium iteration. A reasonable convergent initial shape is found, and a lot of computation efforts can be saved.2. Nonlinear computation procedure: All nonlinearities of cable-stayed bridges are taken into consideration during the whole computation process. The nonlinear cable element with sag effect and the beam-column element including stability coefficients and nonlinear coordinate transformation coefficients are used. Both the shape iteration and the equilibrium iteration are carried out in the nonlinearcomputation. Newton –Raphson method is utilized here for equilibrium iteration.4.2. Static deflection analysisBased on the determined initial shape, the nonlinear static deflection analysis of cable-stayed bridges under live load can be performed incrementwise or iterationwise. It is well known that the load increment method leads to large numerical errors. The iteration method would be preferred for the nonlinear computation and a desired convergence tolerance can be achieved. Newton – Raphson iteration procedure is employed. For nonlinear analysis of large or complex structural systems, a ‘full ’iteration procedure (iteration performed for a single full load step) will often fail. An increment –iteration procedure is highly recommended, in which the load will beincremented, and the iteration will be carried out in each load step. The static deflection analysis of the cable stayed bridge will start from the initial shape determined by the shape finding procedure using a linear or nonlinear computation. The algorithm of the static deflection analysis of cable-stayed bridges is summarized in Section 4.4.2.4.3. Linearized vibration analysisWhen a structural system is stiff enough and the external excitation is not too intensive, the system may vibrate with small amplitude around a certain nonlinear static state, where the change of the nonlinear static state induced by the vibration is very small and negligible. Such vibration with small amplitude around a certain nonlinear static state is termed linearized vibration. The linearized vibration is different from the linear vibration, where the system vibrates with small amplitude around a linear static state. The nonlinear static state qαa can be statically determined by nonlinear deflection analysis. After determining qαa , the system matrices may be established with respect to such a nonlinear static state, and the linearized system equation has the form as follows:MαβA qβ”+ DαβA qβ’+ 2KαβA qβ=pα(t)- TαAwhere the superscript ‘A’denotes the quantity calculated at the nonlinear static state a . This equation represents a set of linear ordinary differential equations of second qαorder with constant coefficient matrices MαβA, DαβA and 2KαβA. The equation can be solved by the modal superposition method, the integral transformation methods or the direct integration methods.When damping effect and load terms are neglected, the system equation becomesMαβA qβ” + 2KαβA qβ=0This equation represents the natural vibrations of an undamped system based on the nonlinear static state qαa The natural vibration frequencies and modes can be obtained from the above equation by using eigensolution procedures, e.g., subspace iteration methods. For the cable-stayed bridge, its initial shape is the nonlinear static state qαa . When the cable-stayed bridge vibrates with small amplitude based on the initial shape, the natural frequencies and modes can be found by solving the above equation.4.4. Computation algorithms of cable-stayed bridge analysisThe algorithms for shape finding computation, static deflection analysis and vibration analysis of cable-stayed bridges are briefly summarized in the following. 4.4.1. Initial shape analysis1. Input of the geometric and physical data of the bridge.2. Input of the dead load of girders and towers and suitably estimated initial forces in cable stays.3. Find equilibrium position(i) Linear procedure•Linear cable and beam-column stiffness elements are used.•Linear constant coordinate transformation coefficients a jαare used. •Establish the linear system stiffness matrix Kαβby assembling element stiffness matrices.•Solve the linear system equation for qα(equilibrium position).•No equilibrium iteration is carried out.(ii) Nonlinear procedure•Nonlinear cables with sag effect and beam-column elements are used. •Nonlinear coordinate transformation coeffi- cients a jα; a jα,βare used. •Establish the tangent system stiffness matrix 2Kαβ.•Solve the incremental system equation for △qα.•Equilibrium iteration is performed by using the Newton–Raphson method.4. Shape iteration5. Output of the initial shape including geometric shape and element forces.6. For linear static deflection analysis, only linear stiff-ness elements and transformation coefficients are used and no equilibrium iteration is carried out.4.4.3. Vibration analysis1. Input of the geometric and physical data of the bridge.2. Input of the initial shape data including initial geometry and initial element forces.3. Set up the linearized system equation of free vibrations based on the initial shape.4. Find vibration frequencies and modes by sub-space iteration methods, such as the Rutishauser Method.5. Estimation of the trial initial cable forcesIn the recent study of Wang and Lin, the shape finding of small cable-stayed bridges has been performed by using arbitrary small or large trial initial cable forces. There the iteration converges monotonously, and the convergent solutions have similar results, if different trial values of initial cable forces are used. However for large cable-stayed bridges, shape finding computations become more difficult to converge. In nonlinear analysis, the Newton-type iterative computation can converge, only when the estimated values of the solution is locate in the neighborhood of the true values. Difficulties in convergence may appear, when the shape finding analysis of cable-stayed bridges is started by use of arbitrary small initial cable forces suggested in the papers of Wang et al. Therefore, to estimate a suitable trial initial cable forces in order to get a convergent solution becomes important for the shape finding analysis. In the following, several methods to estimate trial initial cable forces will be discussed.5.1. Balance of vertical loads5.2. Zero moment control5.3. Zero displacement control5.4. Concept of cable equivalent modulus ratio5.5. Consideration of the unsymmetryIf the estimated initial cable forces are determined independently for each cable stay by the methods mentioned above, there may exist unbalanced horizontal forces on the tower in unsymmetric cable-stayed bridges. Forsymmetric arrangements of the cable-stays on the central (main) span and the side span with respect to the tower, the resultant of the horizontal components of the cable-stays acting on the tower is zero, i.e., no unbalanced horizontal forces exist on the tower. For unsymmetric cable-stayed bridges, in which the arrangement of cable-stays on the central (main) span and the side span is unsymmetric, and if the forces of cable stays on the central span and the side span are determined independently, evidently unbalanced horizontal forces will exist on the tower and will induce large bending moments and deflections therein. Therefore, for unsymmetric cable-stayed bridges, this problem can be overcome as follows. The force of cable stays on the central (main) span T i m can be determined bythe methods mentioned above independently, where the superscript m denotes the main span, the subscript I denotes the ith cable stay. Then the force of cable stays on the side span is found by taking the equilibrium of horizontal force components at the node on the tower attached with the cable stays, i.e., T i m cosαi= T i s cosβi, and T i s = T i m cosαi/ cosβi, where αi is the angle between the ith cable stay and the girder on the main span, andβi, angle between the ith cable stay and the girder on the side span.6. ExamplesIn this study, two different types of small cable-stayed bridges are taken from literature, and their initial shapes will be determined by the previously described shape finding method using linear and nonlinear procedures. Finally, a highly redundant stiff cable-stayed bridge will be examined. A convergence tolerance e =10-4 is used for both the equilibrium iteration and the shape iteration. The maximum number of iteration cycles is set as 20. The computation is considered as not convergent, if the number of the iteration cycles exceeds 20.The initial shapes of the following two small cable stayed bridges in Sections 6.1 and 6.2 are first determined by using arbitrary trial initial cable forces. The iteration converges monotonously in these two examples. Their convergent initial shapes can be obtained easily without difficulties. There are only small differences between the initial shapes determined by the linear and the nonlinear computation. Convergent solutions offer similar results, and they are independent of the trial initial cable forces.7. ConclusionThe two-loop iteration with linear and nonlinear computation is established for finding the initial shapes of cable-stayed bridges. This method can achieve the architecturally designed form having uniform prestress distribution, and satisfies all equilibrium and boundary conditions. The determination of the initial shape is the most important work in the analysis of cable-stayed bridges. Only with a correct initial shape, a meaningful and accurate deflection and/or vibration analysis can be achieved. Based on numerical experiments in the study, some conclusions are summarized as follows:(1). No great difficulties appear in convergence of the shape finding of smallcable-stayed bridges, where arbitrary initial trial cable forces can be used to start thecomputation. However for large scale cable-stayed bridges, serious difficulties occurred in convergence of iterations.(2). Difficulties often occur in convergence of the shape finding computation of large cable-stayed bridge, when trial initial cable forces are given by the methods of balance of vertical loads, zero moment control and zero displacement control. (3). A converged initial shape can be found rapidly by the two-loop iteration method, if the cable stress corresponding to about 80% of E eq=E value is used for the trial initial force of each cable stay in the main span, and the trial force of the cables in side spans is determined by taking horizontal equilibrium of the cable forces acting on the tower.(4). There are only small differences in geometry and prestress distributionforces. The iteration converges monotonously in these two examples. Their convergent initial shapes can be obtained easily without difficulties. There are only small differences between the initial shapes determined by the linear and the nonlinear computation. Convergent solutions offer similar results, and they are independent of the trial initial cable forces.7. ConclusionThe two-loop iteration with linear and nonlinear computation is established for finding the initial shapes of cable-stayed bridges. This method can achieve the architecturally designed form having uniform prestress distribution, and satisfies all equilibrium and boundary conditions. The determination of the initial shape is the most important work in the analysis of cable-stayed bridges. Only with a correct initial shape, a meaningful and accurate deflection and/or vibration analysis can be achieved. Based on numerical experiments in the study, some conclusions are summarized as follows:(1). No great difficulties appear in convergence of the shape finding of small cable-stayed bridges, where arbitrary initial trial cable forces can be used to start the computation. However for large scale cable-stayed bridges, serious difficulties occurred in convergence of iterations.(2). Difficulties often occur in convergence of the shape finding computation of large cable-stayed bridge, when trial initial cable forces are given by the methods ofbalance of vertical loads, zero moment control and zero displacement control. (3). A converged initial shape can be found rapidly by the two-loop iteration method, if the cable stress corresponding to about 80% of E eq=E value is used for the trial initial force of each cable stay in the main span, and the trial force of the cables in side spans is determined by taking horizontal equilibrium of the cable forces acting on the tower.(4). There are only small differences in geometry and prestress distribution between the results of initial shapes determined by linear and nonlinear procedures.(5). The shape finding using linear computation offers a reasonable initial shape and saves a lot of computation efforts, so that it is highly recommended from the point of view of engineering practices.(6). In small cable-stayed bridges, there are only small difference in the natural frequencies based on initial shapes determined by linear and nonlinear computation procedures, and the mode shapes are the same in both cases.(7). Significant differences in the fundamental frequency and in the mode shapes of highly redundant stiff cable stayed bridges is shown in the study. Only the vibration modes determined by the initial shape based on nonlinear procedures exhibit the nonlinear cable sag and beam-column effects of cable-stayed bridges, e.g., the first and third modes of the bridge are dominated by the transversal motion of the tower, not of the girder. The difference of the fundamental frequency in both cases is about 12%. Hence a correct analysis of vibration frequencies and modes of cable-stayed bridges can be obtained only when the ‘correct’initial shape is determined by nonlinear computation, not by the linear computation.HOU Wen-qi. Study of railway steel-concrete composite bridges andshear connectors [D]. Changsha: School of Civil and ArchitecturalEngineering, Central South University, 2009. (in Chinese)[2] ZHANG Ye-zhi. Comparison of bridge structures of railway throughtruss composite bridges [J]. Journal of the China Railway Society,2005, 27(5): 107−110. (in Chinese)[3] VALENTE I, CRUZ P J S. Experimental analysis of Perfobond shear connection between steel and lightweight concrete [J]. Journal ofConstructional Steel Research, 2004, 60: 465−479.[4] NAM Jeong-Hun, YOON Soon-Jong, OK Dong-Min, SHO Sun-Kyu. Perforated FRP shear connector for the FRP-concrete compositebridge deck [J]. Key Engineering Materials, 2007, 334/335:381−384.[5] ZHOU De, YE Mei-xin, LUO Ru-deng. Improved methods fordecreasing stresses of concrete slab of large-span through tied-archcomposite bridge [J]. Journal of Central South University ofTechnology, 2010, 17(3): 648−652.[6] HUANG Qiong, YE Mei-xin, WU Qin-qin. Analysis ofsteel-concrete composite structure with overlap slab of XingguangBridge [J]. Journal of Central South University of Technology, 2007,14(1): 120−124.[7] GIMSING N J. The Øresund technical publications: The BRIDGE[M]. Øresundsbro Konsortier: Repro & Teryk, 2000: 147−148.[8] HOU Wen-qi, YE Mei-xin. Experiments on the mechanicalcharacteristic of the integral steel orthotropic bridge deck with threemain trusses of Nanjing Dashengguan Yangtze River Bridge [J].Journal of Railway Science and Engineering, 2008, 5(3): 11−17. (inChinese)[9] CHEN Yu-ji, YE Mei-xin. Force of through plate-truss compositebeam on high-speed railway [J]. Journal of Central South University:Science and Technology, 2004, 35(5): 849−854. (in Chinese)[文档可能无法思考全面,请浏览后下载,另外祝您生活愉快,工作顺利,万事如意!]11 / 11。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a r X i v :0807.4546v 1 [c o n d -m a t .m t r l -s c i ] 28 J u l 2008Static and dynamic properties of vortices in anisotropic magnetic disksTiago S.Machado 1,Tatiana G.Rappoport 2,and Luiz C.Sampaio 11Centro Brasileiro de Pesquisas F´ısicas,Xavier Sigaud,150,Rio de Janeiro,RJ,22.290-180,Brazil and2Instituto de F´ısica,Universidade Federal do Rio de Janeiro,Rio de Janeiro,RJ,68.528-970,Brazil(Dated:July 28,2008)We investigate the effect of the magnetic anisotropy (K z )on the static and dynamic properties of magnetic vortices in small disks.Our micromagnetic calculations reveal that for a range of K z there is an enlargement of the vortex core.We analyze the influence of K z on the dynamics of the vortex core magnetization reversal under the excitation of a pulsed field.The presence of K z ,which leads to better resolved vortex structures,allows us to discuss in more details the role played by the in-plane and perpendicular components of the gyrotropic field during the vortex-antivortex nucleation and annihilation.PACS numbers:The manipulation of magnetization in nanostructured materials by means of magnetic field and/or spin polar-ized current has attracted substantial attention in the last decade.More recently,a special focus on the study of magnetization reversal dynamics in magnetic disks [1]and lines [2]has been motivated mainly by their potential importance in the implementation of memory and logical operations.Micro-sized Permalloy (Py,FeNi)disks can exhibit,de-pending on their size and aspect ratio,a magnetic vortex with a core (∼10−20nm)magnetized perpendicular to the disk plane [3].Due to the magnetic bi-stability of the vortex structure,they have been considered for technological applications.The vortex core magnetiza-tion reversal can be achieved by applying an in-plane magnetic field or spin polarized current in the form of short pulses [4]and/or alternating (AC)resonant excita-tion [1,5,6]-both have an equivalent role on determining the vortex core dynamics.It is usually considered that the size of the vortex core depends on parameters such as exchange constant,thick-ness and diameter of the magnetic disk.Most of the research on vortices in magnetic systems neglects the ef-fect of magnetic anisotropy.On the other hand,it has been demonstrated that a uniaxial magnetic anisotropy in Permalloy particles can be induced by the deposi-tion process [7].Experiments and simulations have also shown that the presence of anisotropy in thick magnetic disks gives rise to a diversity of domain patterns [7,8].In this letter,we study the role played by the mag-netic anisotropy in the magnetic properties of -ing micromagnetic simulations,we consider a magnetic anisotropy (K z )perpendicular to the disk plane and an-alyze how it modifies the magnetization pattern and the dynamics of the vortex core under action of an in-plane pulsed magnetic field.We also discuss in detail the core reversal process and the influence of K z on the gyrotropic field and the magnetization reversal time.The simulations were performed with a code we devel-oped,which employs the Landau-Lifshitz-Gilbert (LLG)equation.We used the typical magnetic parameters ofPy:the saturation magnetization is given by M s =8.6×105A/m,the exchange coupling is A =1.3×10−11J/m and the Gilbert damping constant is α=0.2.The magnetic anisotropy was included in the total effectivemagnetic field h effand is given by (2K z /µ0M 2s )m z ˆz [9].K z varies from 0to 106J/m 3.We have simulated Py disks with the diameter of 300nm and thickness of 12nm.The disk is discretized in cells of 3×3×3nm 3.Let us first consider the vortex core structure in static equilibrium (in the absence of an external magnetic field).The magnetization pattern of the Py disk presents three characteristic regimes,as can be seen in Fig.1(b-f):for K z below 2.5×105J/m 3the main consequence of in-creasing the anisotropy is an increase of the vortex core diameter.The size of the vortex core is measured at half of the maximum value of m z and its dependence with K z is shown in Fig.1(a).For K z between 2.5×105and 4.0×105J/m 3,m z exhibits concentric regions with +M s and −M s ,still preserving the core in the center of the disk.For K z between 4×105and 6×105J/m 3the core disappears and the number of concentric rings increases,which also happens for larger disks.Moreover,in these two ranges,the in-plane magnetization still preserves the vorticity (see Figs.1d-e).The similarity between these patterns and previous observed patterns in Co nanomag-nets [10]and thick NiFe nanodisks [7]is noteworthy.In both cases,the concentric rings are clearly seen in the images obtained by Magnetic Force Microscopy (MFM).For K z above 6×105J/m 3,the vortex structure is lost and we see what amount to a single domain in m z (Fig.1f).For larger and thinner disks,the magnetization pat-tern is composed by stripes.The prospect of having large vortex cores has clear ad-vantages for magnetization detection.Still,in order to consider the practical aspects it is necessary to study the stability of these vortex cores and the possibility of switching their magnetization.For this purpose,we studied the dynamics of the system under short in-plane magnetic field pulses.We simulated the magnetic rever-sal process and constructed a switching diagram.Simi-lar diagrams for pulse parameters have been constructed2 FIG.1:(a)The diameter of the vortex core as a function of K zfor a disk with diameter of300nm and thickness of12nm.Panels(b-f)show the magnetization pattern for increasingvalues of K z,illustrating the different regimes of(a).Thecolors represent the direction of the in-plane component of themagnetization m xy.A vortex structure is given by a clockwisecolor sequence of blue-green-red.recently for magnetic disks[4].They show that the op-eratingfield range is narrow:lowfields do not producecore switching.On the other hand,higherfields can giverise to multiple switchings.FIG.2:(a)Switching vortex core magnetization diagram formagneticfield pulse strength and K z.The pulse durationisfixed(263ps).Red,green,and blue colors represent no,one,and multiple switches,respectively.In the grey area thevortex core is expelled from the disk.(b)The switching timeas a function of K z for afixedfield strength B0=64mT.With the intention of discussing the influence of K zon this process,we built the diagram sketched in Fig.2a.We use a pulse of Gaussian form with afixed pulseduration(263ps)and a variablefield strength B0.Foreach value of K z,we count the number of core magne-tization inversions during a single pulse length.Fig.2ashows three different dynamical regimes in response tothe excitingfield.In the absence of magnetic anisotropy,thefield strength that is necessary to switch the coremagnetization is B0=60mT.However,forfields higherthan95mT undesirable multiple switches are produced.For disks with K z=0,the pulse necessary to inducethe switching process has a strength comparable to theK z=0case.As can be seen in Fig.2a,an importantconsequence of increasing K z is the decrease of the mini-mumfield necessary to produce a single switch.Such de-pendence on K z,for the minimalfield for the switching,opens the possibility of producing selective vortex inver-sions in a group of magnetic disks with different K z’s.Note that under the action of a pulsedfield,the coremoves towards the disk border in a curved(or spiraling)trajectory.When the pulse is over,the core returns backto the disk center.Depending on the pulse strength andduration,the vortex core can be expelled from the diskduring this process.Such behavior is not shown in ourdiagram and can be avoided by increasing the disk diam-eter.Another interesting aspect of the influence of K z canbe seen in the switching timeτs.τs is the interval be-tween the pulse start and the complete reversal of thevortex core magnetization.We have calculatedτs for agiven pulse strength(B0=64mT)in the single switch-ing regime(see the horizontal line in the Fig.2a).τs forK z=0is213ps and it increases monotonically withK z,reaching values≃1.4times larger thanτs(K z=0)(Fig.2b).For thinner disks(6nm)τs can reach up to2.5τs(K z=0).FIG.3:(a)Time evolution of the gyrotropicfield(perpen-dicular component).Snapshots of vortices and antivortex for(b)K z=0at the maxima of the gyrotropicfield and(c)K z=2.5×105J/m3and t=263ps.The color map repre-sents the perpendicular component of the magnetization(m z)and the arrows show the in-plane component.The inset ofpanel(a)gives a transverse view of m z.A closer look at the core reversal dynamics for diskswith K z=0shows that the intermediate processes lead-ing to the switching are similar to the ones obtainedin previous analysis for K z=0[1,4,5,11,12]:thecore shape changes during the magnetization reversal,3through the formation of the adjacent V-AV (vortex-antivortex)pair and the subsequent V-AV annihilation and nucleation of the reversed vortex.However,in op-position to what is normally observed in micromagnetic calculations,here,due to the increase of the vortex core diameter,the formation of the adjacent V-AV pair dur-ingthe reversal process can bewell resolved (see inset of Fig.3and Figs.3(b)and (c)).FIG.4:In-plane component of the gyrotropic field (arrows)just before (a)and after (b-d)the nucleation and separation of the vortex and antivortex with negative magnetizations.The color map represents the out-of-plane magnetization.The vortex core magnetization reversal,its switching time,the core motion and its deformations can be under-stood in terms of the gyrotropic field [1,11],which acts on the vortex core only during its movement.The gy-rotropic field is given by h g =1γm×˙m.All calculations shown below were performed with this last expression of h g .Previous discussions on the gyrotropic field have em-phasized the role of the perpendicular component of this effective field in the reversal process[11].To further in-vestigate this,we have calculated the perpendicular h z gand the in-plane h xyg component as well.First,we discuss the time evolution of the perpendicular component h z g for K z =0and 2.5×105J/m 3,which is shown Fig.3a.Fol-lowing the application of the field pulse,the core moves and h z g acts on the core at the side opposite to the move-ment direction leading to the formation of a peak with negative magnetization.At this stage,it is just a peak without a vortex structure.h z g increases (in modulus)up to the point where the peak is so wide that it leads to the nucleation of a V-AV pair,labelled as V −-AV −,re-spectively.In conjunction with this V −-AV −nucleation there is a decrease (in modulus)of h z g .Subsequently,the AV −-V +annihilation takes place at the h z g divergence.This divergence is in agreement with Ref.11.Such be-havior is independent of K z but it is worth noticing that the separation of the V −-AV −is better resolved spatially and takes place after an interval that is longer than the one for K z =0.This can be seen in the snapshots in the inset of Fig.3,and in the comparison of Figs.3(b)and (c).On the right one sees the V +with a close neighbor,at its left,which is the AV −.Further on the left,one sees the V −.As can be gathered from the figures,h z g de-creases for increasing values of K z and that is the reason for the increase of τs .One of the main advantages of considering K z =0in our calculations is the large separation between the Vs and AVs involved in the switching process.This allows us to analyze in more details the structure of the gyrotropic field in between these vortex structures.Normally,due to the small distance between them,we cannot resolve the differences in the gyrotropic field produced by the move-ment of vortices and antivortices and the nucleation of the V-AV pair cannot be fully understood from this type of analysis.For that,we calculated the h xy g component during the V −-AV −nucleation and separation,which are fundamental steps in the process of core magnetization reversal.Fig.4a shows h xy g for an instant just beforethe V −-AV −nucleation and separation.The color map and the arrows illustrate the z magnetization componentand h xy g ,respectively.The red circle is the original V +and the blue one is the negative peak.We can see from Figs.4a-b that h xy g is responsible for the transformation of this wide negative peak to a V −-AV −pair and acts as a driven force pushing V −.As can be seen Fig.4b,h xy g pushes the AV−in the direction of V +,producing the pair annihilation.In Fig.4c it is also possible to observe the spin waves generated by the AV −-V +anni-hilation.In the last snapshot,we can see the remaining V −(see Fig.4d).We would like to stress that to our knowledge,this is the first analysis that shows explicitly the dynamics responsible for both the AV −-AV −nucle-ation and separation and V −-V +annihilation.For in-stance,considering only the perpendicular component of h g ,together with the vorticity conservation,one is able to explain the AV −-V +annihilation but not the V −-AV −nucleation and separation process.In conclusion,we presented a detailed analysis of the influence of K z on static and dynamic properties of mag-netic vortices in disks.We showed that increasing values of K z produce a growth of the vortex core.In addition,high values of K z cause a change in the magnetization pattern.We then showed,by means of dynamical cal-culations using in-plane magnetic field pulses,that both in-plane and perpendicular components of the gyrotropicfield,h z g and h xyg ,contribute and are fundamental to the understanding of the vortex core magnetization reversal process.We thank Fl´a vio Garcia for useful discussions and the Brazilian agencies CNPq and FAPERJ for financial sup-port.4[1]K.Yamada,S.Kasai,Y.Nakatani,K.Kobayashi,H.Kohno,A.Thiaville,and T.Ono,Nature Materials,6, 269(2007).[2]S.S.P.Parkin,M.Hayashi,and L.Thomas,Science,320,190(2008),and References therein.[3]T.Shinjo,T.Okuno,R.Hassdorf,K.Shigeto and T.Ono,Science289,930(2000);A.Wachowiak J.Wiebe, M.Bode,O.Pietzsch,M.Morgenstern,and R.Wiesen-danger,Science298,577(2002).[4]R.Hertel,S.Gliga,M.F¨a hnle,and C.M.Schneider,Phys.Rev.Lett.98,117201(2007).[5]B.Van Waeyenberge,A.Puzic,H.Stoll,K.W.Chou,T.Tyliszczak,R.Hertel,M.Fhnle,H.Brckl,K.Rott,andG.Reiss,Nature444,461(2006).[6]K.-S Lee,K.Y.Guslienko,J.-Y Lee,and S.-K.Kim,Phys.Rev.B76,174410(2007).[7]P.Eames and E.Dan Dahlberg,J.Appl.Phys.91,7986(2002).[8]C.Moutafis,S.Komineas,C.A.F.Vaz,J.A.C.Bland,and P.Eames,Phys.Rev.B74,214406(2006).[9]J.Fidler,and T.Schrefl,J.Phys.D:Appl.Phys.33,135(2000).[10]M.Hehn et al.,Science272,1782(1996).[11]K.Y.Guslienko,Ki-Suk Lee,and Sang-Koog Kim,Phys.Rev.Lett.100,027203(2008).[12]Q.F.Xiao,J.Rudge,B.C.Choi,Y.K.Hong,and G.Donohoe,Appl.Phys.Lett.89,262507(2006).[13]A.A.Thiele,Phys.Rev.Lett.30,230(1973).。