光学轮廓仪培训讲义(2008年下学期)
轮廓仪操作指导书
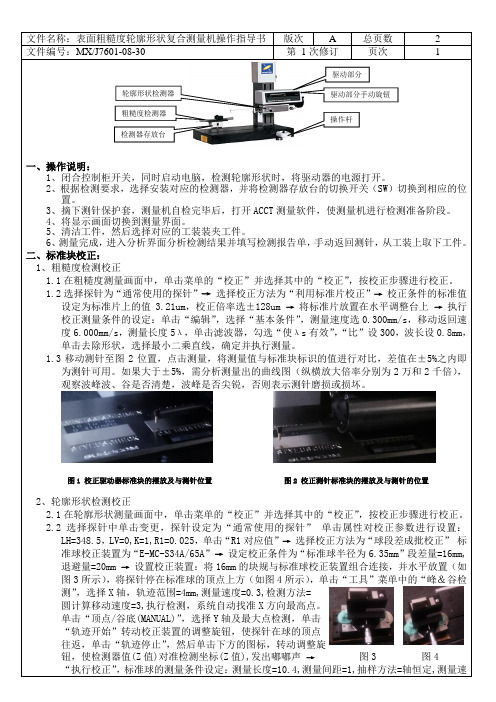
文件名称:表面粗糙度轮廓形状复合测量机操作指导书 版次 A 总页数 2 文件编号:MX/J7601-08-30 第 1次修订 页次 1一、操作说明:1、闭合控制柜开关,同时启动电脑,检测轮廓形状时,将驱动器的电源打开。
2、根据检测要求,选择安装对应的检测器,并将检测器存放台的切换开关(SW )切换到相应的位置。
3、摘下测针保护套,测量机自检完毕后,打开ACCT 测量软件,使测量机进行检测准备阶段。
4、将显示画面切换到测量界面。
5、清洁工件,然后选择对应的工装装夹工件。
6、测量完成,进入分析界面分析检测结果并填写检测报告单,手动返回测针,从工装上取下工件。
二、标准块校正: 1、粗糙度检测校正1.1在粗糙度测量画面中,单击菜单的“校正”并选择其中的“校正”,按校正步骤进行校正。
1.2选择探针为“通常使用的探针”→ 选择校正方法为“利用标准片校正”→ 校正条件的标准值设定为标准片上的值3.21um ,校正倍率选±128um → 将标准片放置在水平调整台上 → 执行校正测量条件的设定:单击“编辑”,选择“基本条件”,测量速度选0.300mm/s ,移动返回速度6.000mm/s ,测量长度5λ,单击滤波器,勾选“使λs 有效”,“比”设300,波长设0.8mm ,单击去除形状,选择最小二乘直线,确定并执行测量。
1.3移动测针至图2位置,点击测量,将测量值与标准块标识的值进行对比,差值在±5%之内即为测针可用。
如果大于±5%,需分析测量出的曲线图(纵横放大倍率分别为2万和2千倍),观察波峰波、谷是否清楚,波峰是否尖锐,否则表示测针磨损或损坏。
图1 校正驱动器标准块的摆放及与测针位置 图2 校正测针标准块的摆放及与测针的位置2、轮廓形状检测校正2.1在轮廓形状测量画面中,单击菜单的“校正”并选择其中的“校正”,按校正步骤进行校正。
2.2选择探针中单击变更,探针设定为“通常使用的探针” 单击属性对校正参数进行设置:LH=348.5,LV=0,K=1,R1=0.025,单击“R1对应值”→ 选择校正方法为“球段差成批校正” 标准球校正装置为“E-MC-S34A/65A ”→ 设定校正条件为“标准球半径为6.35mm ”段差量=16mm,退避量=20mm → 设置校正装置:将16mm 的块规与标准球校正装置组合连接,并水平放置(如图3所示),将探针停在标准球的顶点上方(如图4所示),单击“工具”菜单中的“峰&谷检测”,选择X 轴,轨迹范围=4mm,测量速度=0.3,检测方法= 圆计算移动速度=3,执行检测,系统自动找准X 方向最高点。
轮廓度和位置度培训资料

轮廓度符号 公差域 偏置值 基准
偏置值为正数时 上公差=理论值+偏置值 下公差=上公差-公差域
偏置值为0或者负数时 上公差=理论值-偏置值 下公差=上公差-公差域
团结●欣赏●感恩●支持
2. 位置度解读简述(1)
位置度
• 表示零件上的点,线,面等要素,相对其理想位置的准确状况
Y
φXY
60
100
X
位置度结果= 2 (X实-X理)+(Y实-Y理) 注意事项:位置度无论带φ还是不带φ结果都必须要×2
向内-0.2/-0.8
外侧检具通止规3.2-3.8 内侧检具通止规2.2-2.8
团结●欣赏●感恩●支持
2. 轮廓度案例(5)
向外偏置0.2-0.8
例如:标准3.0 公差0.2/0.8 范围值3.2-3.8
外侧检具通止规2.2-2.8 内侧检具通止规3.2-3.8
团结●欣赏●感恩●支持
2. 轮廓度案例(6)
三次元测定的结果也是要×2 (三次元自动×2 除外)
团结●欣赏●感恩●支持
2 (148-151)2 +(96-94)
2
(-3)2 +(2)2
2 9+4
2 13 2 3.6056
7.2112
谢谢!
THANKS
向外偏置1.0
箭头向外,尺寸要向外偏置
例如:标准3.0 公差0-1.0
范围值3.0-4.0
外侧检具通止规2.0-3.0 内侧检具通止规3.0-4.0
团结●欣赏●感恩●支持
2. 轮廓度案例(4)
G12D-22043OA 4112421CRD0000
箭头向内,尺寸要向内偏置
例如:标准3.0 公差-0.2/-0.8 范围值2.2-2.8、 从基准平面A开始 理论的正正确值是150mm的理想面、 从这个 面开始只是向上方0.3mm的公差。
光学轮廓仪培训记录
光学轮廓仪培训记录
一、培训简介光学轮廓仪培训是一项基于光学原理的实验室仪器培训,主要讲授光学轮廓仪的使用方法和操作技巧。
培训内容包括:光学轮廓仪
的结构、工作原理及安装等;关于光学轮廓仪的运行状态检测和维护保养
等内容;使用光学轮廓仪进行实验室数据测量测量,并完成对样品数据的
分析及应用等。
二、实验室培训内容1.介绍光学轮廓仪的结构和工作原
理介绍光学轮廓仪的结构:主要由发射器、接收器、检测器和光路系统等
组成;介绍光学轮廓仪的工作原理:发射器发出的光线照射到样品表面,
接收器收集到的光线由检测器进行检测,利用光路系统对发射和接收的光
线进行定向,从而获得样品表面轮廓变化的数据。
2.保持光学轮廓仪的工
作状态正确操作光学轮廓仪,首先要做好安全措施;其次,要定期检测光
学轮廓仪的运行状态,并维护包括更换照明灯泡、维护检测器及镜头等组件,保持光学轮廓仪的正常工作。
3.光学轮廓仪的使用讲解光学轮廓仪的
使用,主要包括以下几点:(1)熟悉软件系统,如安装使用、调节测量参数;(2)选择正确的测量距离和参数;(3)检查测量环境是否干净。
光学轮廓仪工作原理【下载】
光学轮廓仪一款用于对各种精密器件表面进行亚纳米级测量的检测仪器。
它是以白光干涉技术为原理、结合精密Z向扫描模块、3D 建模算法等对器件表面进行非接触式扫描并建立表面3D图像,通过系统软件对器件表面3D图像进行数据处理与分析,并获取反映器件表面质量的2D、3D参数,从而实现器件表面形貌的3D测量的光学检测仪器。
为什么需要测量表面形貌?在生产中,微观上的表面形貌对工程零件的许多技术性能的评价具有直接的影响,而且表面三维评定参数由于能更全面、更真实地反映零件表面的特征及衡量表面的质量而越来越受到重视,因此表面三维微观形貌的测量就越显重要。
通过对三维形貌的测量可以比较全面地评定表面质量的优劣,进而确认加工方法的好坏及设计要求的合理性,这样就可以反过来通过指导加工、优化加工工艺以加工出高质量的表面,确保零件使用功能的实现。
光学表面轮廓仪的测量原理:光源发出的光经过扩束准直后经分光棱镜后分成两束,一束经被测表面反射回来,另外一束光经参考镜反射,两束反射光最终汇聚并发生干涉,显微镜将被测表面的形貌特征转化为干涉条纹信号,通过测量干涉条纹的变化来测量表面三维形貌。
功能光学轮廓仪对各种产品、部件和材料表面的平面度、粗糙度、波纹度、面形轮廓、表面缺陷、磨损情况、腐蚀情况、孔隙间隙、台阶高度、弯曲变形情况、加工情况等表面形貌特征进行测量和分析。
一句话概括就是测量超光滑表面(纳米级别)微观形貌。
典型应用中图仪器SuperView W1系列光学轮廓仪应用非常广泛。
在3C领域,SuperView W1系列光学轮廓仪可以测量蓝宝石屏、滤光片、表壳等表面粗糙度;在LED行业,SuperView W1系列光学轮廓仪可以测量蓝宝石、碳化硅衬底表面粗糙度;在光纤通信行业,SuperView W1系列光学轮廓仪可以测量光纤端面缺陷和粗糙度;在集成电路行业,SuperView W1系列光学轮廓仪可以测量硅晶片或陶瓷晶片表面粗糙度;在EMES行业,SuperView W1系列光学轮廓仪可以测量台阶高度和表面粗糙度;在军事领域,SuperView W1系列光学轮廓仪可以测量蓝宝石观察窗口表面粗糙度。
光学轮廓仪培训记录

光学轮廓仪培训记录1.光学轮廓仪品牌:KLA Tencor2.光学轮廓仪型号:Microxam-12003.工作模式:Phase model和EX modelPhase model:用来测量样品表面粗糙度,主要针对光滑表面,测量垂直分辨率是0.1nm,最大纵深为1um。
EX model:用来测量样品表面台阶高度,测量台阶的最大高度可达5mm,但多用来测量台阶的高度最大为100um,因为PZT(压电陶瓷)的scan hight100um,(区别台阶最大测量高度是5mm,这个高度可以通过调节显微镜来达到),通常都是测量100um之内的台阶高度,如果要测更大的台阶高度可用实验室的台阶仪。
4.光源采用卤素灯,光线几近于白光,Phase model采用滤光片得到绿光来作为显微镜的光源,EX Model采用卤素灯的光源。
如果采用其他波长的光源,由于仪器初始设置为默认绿光的设置,所以不能用其他波长的光线,否则软件无法进行正常分析。
5.测量范围:这个是可变的,与所采用的物镜的倍数、光阑的大小有关,没有具体的数值,因为光阑的大小可以自己调节,物镜有两种倍数的(10×和50×),多则500um×500um可以比这个范围还大。
注意50×目镜焦距是3.4mm,10×目镜焦距是7.3mm.6.对测量角度也有要求:因为是采用反射光的干涉效应,因此要求表面角度不能太大,如果太大就无法将反射光收集到,根据所使用的物镜倍数有关,50×物镜要求最大角度在22.6度,10×要求角度是在2度左右吧。
7.对样品的要求:理论上只要样品的反射率在1%~100%都能测量,但是实际上样品的反射率不能太低,否则由于反射光强不够也不能观察,反射率也不能太高否则反射光强太强就无法观测了,一般要求反射率最低大约4%(比如玻璃),最高没有什么具体参数标准。
还有样品表面不能太粗糙否则由于漫反射太强没有光线进入显微镜,而无法测量。
《光学仪器维修培训》课件
维护与保养
定期对光学仪器进行保养,以延长其 使用寿命。
维修技巧与实践
避免使用不合适的工具
遵循操作规程
根据维修需要选择合适的工具,避免使用 不合适的工具导致损坏。
在维修过程中遵循操作规程,确保安全和 准确性。
参考技术资料
实践与经验积累
在维修前查阅相关技术资料,了解光学仪 器的结构和原理。
通过不断的实践和经验积累,提高维修技 能和效率。
培训方式与方法
培训方式
线上与线下相结合,包括视频教程、PPT讲 解、实际操作演示等。
理论讲解
介绍光学仪器的基本原理、结构和工作方式 。
案例分析
通过实际案例,分析常见故障的原因和解决 方法。
实践操作
学员在指导下进行实际操作,培养动手能力 。
培训效果评估与改进
评估方式
通过理论测试、实践操作考核以及学员反馈进行评估。
改进措施
根据评估结果,对培训内容和方法进行调整和优化,以提高培训效果。
REPORT
CATALOG
DATE
ANALYSIS
SUMMAR Y
06
总结与展望
总结
课程内容回顾
光学仪器的基本原理
常见故障及诊断方法
总结
维修工具与技巧
学习效果评估
案例分析与实践操作
总结
通过测试和练习题检验学员掌握程度
收集学员反馈,优化后续培训内容
REPORT
CATALOG
DATE
ANALYSIS
SUMMAR Y
04
光学仪器维修实例分析
实例一:显微镜的光学系统维修
维修过程概述
显微镜的光学系统由多个透镜和反射镜组成,用于将物体 放大并清晰地呈现。当显微镜的光学系统出现故障时,如 图像模糊或失真,需要进行维修。
光学仪器维修培训ppt课件(1)

光源故障
光源老化、损坏等,导致光强不 足或不稳定,影响成像效果。
其他类型故障
软件问题
软件程序错误、病毒感染等,导 致仪器操作异常或数据错误。
环境因素
温度、湿度、振动等环境因素超出 仪器承受范围,导致仪器性能下降 或损坏。
人为因素
误操作、保养不当等人为原因,导 致仪器故障或损坏。
维修工具与设备介
03
检测设备
用于检测光学仪器的性能参数 ,如分辨率、透过率等。
工具设备使用注意事项
01
使用前应检查工具设备 的完好性和准确性,确 保其能正常工作。
02
使用时应按照操作规范 进行,避免对光学仪器 造成损坏。
03
使用后应及时清洁和保 养工具设备,以延长其 使用寿命。
04
对于不熟悉的工具设备 ,应在专业人员的指导 下进行操作。
维修方法与技巧分
04
享
机械部分维修方法
常规维护
定期清洁机械部件,检查紧固件是否松动,保持 机械系统稳定性。
故障诊断
通过听、看、摸等方式判断机械故障,如轴承磨 损、传动异常等。
零件更换
针对损坏严重的零件,及时更换以确保机械部分
确认电源供应是否正常,检查电源线是否破损或老化。
未来发展趋势预测
01
智能化维修
随着科技的不断发展,未来光学仪器的维修将更加智能化,通过引入人
工智能、机器学习等技术,提高维修效率和准确性。
02
远程维修服务
随着互联网技术的普及,未来有望实现远程维修服务,用户可以通过网
络平台寻求专业维修人员的帮助,降低维修成本和时间成本。
03
绿色维修理念
环保意识的提高将推动光学仪器维修向绿色、环保的方向发展,注重资
三维光学轮廓仪的主要工作原理
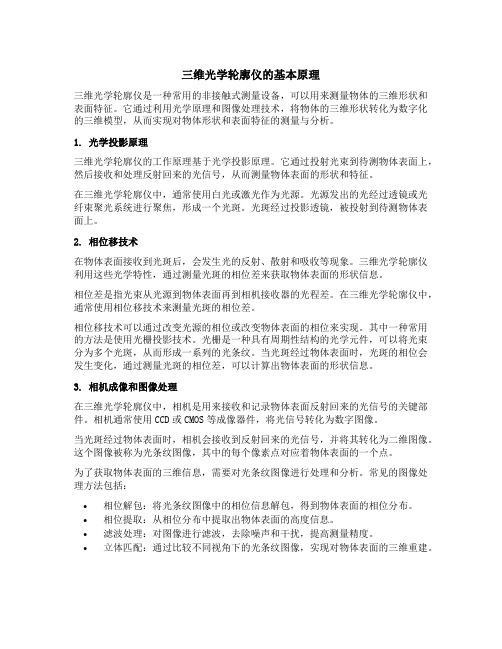
三维光学轮廓仪的基本原理三维光学轮廓仪是一种常用的非接触式测量设备,可以用来测量物体的三维形状和表面特征。
它通过利用光学原理和图像处理技术,将物体的三维形状转化为数字化的三维模型,从而实现对物体形状和表面特征的测量与分析。
1. 光学投影原理三维光学轮廓仪的工作原理基于光学投影原理。
它通过投射光束到待测物体表面上,然后接收和处理反射回来的光信号,从而测量物体表面的形状和特征。
在三维光学轮廓仪中,通常使用白光或激光作为光源。
光源发出的光经过透镜或光纤束聚光系统进行聚焦,形成一个光斑。
光斑经过投影透镜,被投射到待测物体表面上。
2. 相位移技术在物体表面接收到光斑后,会发生光的反射、散射和吸收等现象。
三维光学轮廓仪利用这些光学特性,通过测量光斑的相位差来获取物体表面的形状信息。
相位差是指光束从光源到物体表面再到相机接收器的光程差。
在三维光学轮廓仪中,通常使用相位移技术来测量光斑的相位差。
相位移技术可以通过改变光源的相位或改变物体表面的相位来实现。
其中一种常用的方法是使用光栅投影技术。
光栅是一种具有周期性结构的光学元件,可以将光束分为多个光斑,从而形成一系列的光条纹。
当光斑经过物体表面时,光斑的相位会发生变化,通过测量光斑的相位差,可以计算出物体表面的形状信息。
3. 相机成像和图像处理在三维光学轮廓仪中,相机是用来接收和记录物体表面反射回来的光信号的关键部件。
相机通常使用CCD或CMOS等成像器件,将光信号转化为数字图像。
当光斑经过物体表面时,相机会接收到反射回来的光信号,并将其转化为二维图像。
这个图像被称为光条纹图像,其中的每个像素点对应着物体表面的一个点。
为了获取物体表面的三维信息,需要对光条纹图像进行处理和分析。
常见的图像处理方法包括:•相位解包:将光条纹图像中的相位信息解包,得到物体表面的相位分布。
•相位提取:从相位分布中提取出物体表面的高度信息。
•滤波处理:对图像进行滤波,去除噪声和干扰,提高测量精度。
日本尼康运动光学双筒望远镜培训资料PPT

望远镜的口径指的是什么? 望远镜的口径指的是什么?
口径是指望远镜物镜的直径。 口径是指望远镜物镜的直径。 口径越大,观测视场、亮度就越大, 口径越大,观测视场、亮度就越大, 有利于暗弱光线下的观测! 有利于暗弱光线下的观测! 但口径越大体积就越大! 但口径越大体积就越大! 一般双望的口径在: 之间。 一般双望的口径在:21-50mm之间。 之间 一般口径为70mm、80mm、100mm的为大 一般口径为 、 、 的为大 口径望远镜产品,体积很大且配有支架。 口径望远镜产品,体积很大且配有支架。
(尼康)双筒望远镜介绍: 尼康)双筒望远镜介绍:
(尼康)双筒望远镜——向您展现双筒望远镜梦幻般的新世界! 尼康)双筒望远镜 新闻: 新闻:2008.4.28 尼康的双筒望远镜目前在中国市场上的销售主要是面向企事业用户,具体 的购买方法请咨询尼康公司的代理商——上海胜利测试技术有限公司 上海胜利测试技术有限公司 目前,引进中国市场上, 目前,引进中国市场上,正规销售的尼康望远镜产品 MONARCH(狩猎与户外系列)双筒望远镜 HG L(高等系列)双筒望远镜 说明: 说明: 尼康映像仪器销售(中国)有限公司与中国质量检验协会合作, 上市的尼康正规产品的包装盒上都会贴上专门的防伪标
DCF、UCF、PCF是什么意思? 、 是什么意思? 、 是什么意思
DCF、UCF、PCF是人们对望远镜型号的习惯称呼 DCF——指直筒式望远镜 直筒式望远镜; 直筒式望远镜 UCF——指采用保罗棱镜的小型望远镜 (又称:小保罗 小保罗) 小保罗 PCF——指采用保罗棱镜的大型望远镜 (又称:大保罗 大保罗)。 大保罗
望远镜的市场分析 什么地方会用到望远镜? 什么地方会用到望远镜?
户外活动的时候 外出旅游, 外出旅游,欣赏风景 看演出,表演,演唱会,体育比赛, 看演出,表演,演唱会,体育比赛,赛车 送人,送朋友,送客户, 送人,送朋友,送客户,送领导 野生动物观察,爱鸟协会, 野生动物观察,爱鸟协会,动物保护 林业局,环保组织, 林业局,环保组织,政府采购 军队,警察, 军队,警察,安防行业 高档商场有卖望远镜(奢侈品) 高档商场有卖望远镜(奢侈品)
轮廓仪使用教材

60
61
确认装夹镜片时 ,是否放平,看 此检测面形两边 是否对称,是否 在同一水平线上
19
5.轮廓仪测量流程
5.3指针接触被测物品
传感器指针与测量产品接触时应采用自动方
式接触,尽量避免手动接触;
注意:被测量产品不能有大的台阶,突起或 窄缝,若有可以不测量,以避免探针或传感器 损坏. 测量过程中手不能接触探针或工作台,还应减 少震动,防止测量数据不准或损伤仪器.
47
F.点检时应做好相关的点检记录.
1.百分表
1-2.百分表的使用
A.每测量一个产品时,应确认指针是否在”0”位. B.百分表读数---小表+大表,可四舍五入,测量范围 0-10毫米,每一小格等于0.01毫米,一大格等于0.1 毫米,一圈等于1毫米. 小表指针是逆时针旋转 大表指针是顺时针旋转 C.产品接触表头与平台时,应垂直放置. D.百分表,高度调整或表盘调动后,要用平整的铁砂
非球面测量,测量产品实际的面形形状, 为后工程提供实际检测情况,以确定品质状况.
4
2-1. 轮廓仪的结构
5
2-2. 轮廓仪的结构
大理石立柱
Z轴尺(高度)
6
2-3. 轮廓仪的结构
螺杆
驱动箱
指示灯
移动光标
7
2-4. 轮廓仪的结构
紧急按钮
操作杆
8
2-5. 轮廓仪的结构
传感器 探针 放镜片平台 指示灯 平台调节钮 (共4个) 放镜片平台
14
4.轮廓仪常见图示图标
仪器状态窗口显示传感器图示, 指针箭头在显示
段上下移动,并改变颜色来反映它指出的段,分别是:绿 色,黄色,红色 ,三颜色各代表的意思(绿,表示正常范
轮廓仪操作

轮廓仪使用说明书编制:审核:目录第一章轮廓仪的测量原理及结构、功能 (3)1.1轮廓仪的测量原理 (3)1.2轮廓仪整体结构 (4)1.2.1主机配置 (4)1.2.1.1测量部分 (4)1.2.1.1.1操作面板 (7)1.2.1.2数据处理部分 (8)1.2.2计算机系统 (8)第二章轮廓仪的开机和关机 (9)2.1开机过程 (9)2.2关机过程 (10)第三章轮廓仪的测针校验 (10)3.1 测针校验原理 (10)3.2 测针校验过程 (12)3.2.1校验开始前应该注意三个问题 (12)3.2.2校验步骤 (13)3.2.3校验结果判定 (15)第四章轮廓仪常见零件的测量及分析 (15)4.1齿形类零件的测量 (15)4.1.1.水泵皮带轮和发电机4.1.2曲轴皮带轮 (16)4.2气环 (18)4.3气门 (20)第五章轮廓仪的测量报告 (21)第六章轮廓仪的警告及注意事项 (22)6.1警告 (22)6.2注意 (23)第七章轮廓仪的点检、保养及维修 (24)7.1点检、保养 (24)7.2维修 (25)第八章轮廓仪常见故障及解决方案8.1设备运行及测量过程中常见的问题及解决方法 (26)第一章轮廓仪的测量原理及结构、功能1.1轮廓仪的测量原理轮廓仪又叫轮廓测量仪,轮廓测量仪是测量各种机械零件素线形状和截面轮廓形状的精密设备。
它的工作原理是轮廓仪测量工件表面轮廓时,将传感器放在工件被测表面上,由仪器内部的驱动机构带动传感器沿被测表面做等速滑行,传感器通过内置的锐利触针感受被测表面的几何形状变化,此时工件被测表面的几何形状变化引起触针产生位移,该位移使传感器电感线圈的电感量发生变化,从而在相敏整流器的输出端产生与被测表面轮廓成比例的模拟信号,该信号经过放大及电平转换为数字信号进入数据采集系统。
计算机对原始轮廓进行分析和计算。
表面轮廓测量仪属于一种形状测量仪,采用的是触针法。
1.2轮廓仪整体结构包括主机配置和窗口程序。
3D光学轮廓仪

廓仪Sensofar S系列感受3D最新的S系列3D光学轮廓仪,为您展现全新的3D立体形貌全新设计的3D光学轮廓仪 S neox颠覆传统, 将共聚焦、干涉和多焦面叠加技术融合于一身,测量头内无运动部件。
S neox,将三种技术都做到最好2融合3种测量方式于一体D体验共聚焦技术可以用来测量各类样品表面的形貌。
它比光学显微镜有更高的横向分辨率,可达0.09µm。
利用它可实现临界尺寸的测量。
当用150倍、0.95数值孔径的镜头时,共聚焦在光滑表面测量斜率达70°(粗糙表面达86°)。
专利的共聚焦算法保证Z轴测量重复性在纳米范畴。
相位差干涉 相位差干涉是一种亚纳米级精度的用于测量光滑表面高度形貌的技术。
它的优势在于任何放大倍数都可以保证亚纳米级的纵向分辨率。
使用2.5倍的镜头就能实现超高纵向分辨率的大视场测量。
白光干涉白光干涉是一种纳米级测量精度的用于测量各种表面高度形貌的技术。
它的优势在于任何放大倍数都可以保证纳米级的纵向分辨率。
多焦面叠加技术是用来测量非常粗糙的表面形貌。
根据Sensofar在共聚焦和干涉技术融合应用方面的丰富经验,特别设计了此功能来补足低倍共聚焦测量的需要。
该技术的最大亮点是快速 (mm/s)、扫描范围大和支援斜率大(最大86°)。
此功能对工件和模具测量特别有用。
干涉多焦面叠加共聚焦无运动部件的共聚焦380160240320400480560400425450475500525550575600625650675700725Dichroic Blue FilterBlue LED Green LED Red LEDDichroic Green FilterDichroic Red FilterWhite LED多波长的LED 光源红色.绿色.蓝色.白色S neox 有4个独立的LED 光源红色(630nm), 绿色(530nm), 蓝色(460nm) 和白色,可以满足各种应用的需要。
光学式表面粗糙度轮廓仪安全操作及保养规程
光学式表面粗糙度轮廓仪安全操作及保养规程随着现代工业的不断发展,表面质量已经成为了生产制造的重要指标之一。
表面粗糙度轮廓测量技术逐渐得到了广泛应用。
在表面粗糙度测量领域,光学式表面粗糙度轮廓仪以其高精度、稳定性、无接触等特点受到了广泛青睐。
但是,由于光学式表面粗糙度轮廓仪采用了复杂的光学元件,使用过程中需要特别注意安全操作及保养规程,才能达到仪器的最佳使用效果。
为了确保光学式表面粗糙度轮廓仪的正常工作,保障测试人员的人身安全以及仪器的长期使用寿命,本文将从以下几个方面着重介绍光学式表面粗糙度轮廓仪的安全操作及保养规程。
一、仪器安装注意事项在使用光学式表面粗糙度轮廓仪前,必须确保正确、稳定地安装了仪器。
在搬运和安装过程中,为了避免发生意外,应慎重执行以下操作:1.搬运过程中应注意轻拿轻放,以防仪器受到振动而受损。
2.仪器安装地面应水平,特别是台面要平整、牢固。
否则,仪器将不能发挥最佳的性能和精度,甚至可能出现误差,影响测量结果。
3.操作人员在进行光学式表面粗糙度轮廓仪的安装过程中,应按照专业技术要求进行操作,避免误操作。
二、仪器使用前的准备工作在正常使用光学式表面粗糙度轮廓仪之前,需要进行以下准备工作:1.阅读仪器说明书。
操作人员必须细阅仪器说明书,以充分了解仪器的使用方法、注意事项、保养规则,从而正确使用仪器。
2.校准仪器。
由于环境温度、湿度等因素可能会对测量结果产生影响,因此,操作人员应在测量前对仪器进行校准,以保证测量结果的准确性。
三、仪器操作流程在正式使用光学式表面粗糙度轮廓仪测量表面粗糙度时,操作人员应按照以下流程进行操作:1.打开电源。
请务必使用仪器自带的电源,避免使用其他电源,发生电压不匹配等问题。
2.打开仪器。
按照仪器说明书的步骤打开仪器。
3.选择测试参数。
根据被测工件的实际情况(如材质、表面粗糙度等)选择合适的测试参数。
4.将被测工件放置在测试台上。
确保被测工件牢固、稳定地放置在测试台上,并使测量区域和光学探头正对。
光学仪器维修培训ppt课件精品模板分享(带动画)

其他光学仪器的维修案例分享
光学仪器维修培训
汇报人:
目录
单击添加目录标题
光学仪器常见故障 及排除方法
光学仪器维修基础 知识
光学仪器维修案例 分析
光学仪器维修工具 和材料
光学仪器维修行业 现状和发展趋势
单击添加章节标题
光学仪器维修基础知 识
光学仪器的基本原理
光的干涉原理
光的衍射原理
光的偏振原理
光的散射原理
光学仪器的种类和用途
维修材料的选用和注意事项
光学仪器维修 中常用的材料 包括胶粘剂、 密封材料、光
学元件等
选用胶粘剂时 需要注意其固 化速度、粘接 强度、透明度
等因素
密封材料的选 用需要考虑其 耐温、耐压、 耐腐蚀等方面
光学元件的选 用需要根据具 体的维修需求 进行选择,例 如透镜、反射
镜等
维修工具和材料的采购途径和价格范围
采购途径:线上购买、线下实体店购买
价格范围:根据不同品牌、型号和材料质量,价格会有所不同,建议根 据实际需求进行比较购买
光学仪器常见故障及 排除方法
望远镜常见故障及排除方法
望远镜无法 对焦
望远镜视野 模糊
望远镜有光 斑
望远镜调焦 手感不良
显微镜常见故障及排除方法
图像模糊不清:检查物镜和目 镜表面是否清洁,调整焦距
培训内容:未来光学仪器维修培训将更加注重实践操作和技能提升,培训内容将更加贴近实 际应用场景,注重解决实际问题。
光学仪器维修培训ppt课件

自动安平的原理
1.可动十字丝型 仪器倾斜的同时,设法使十字丝相对于仪器作反方向摆动,使视准轴保持在水平方向,不受 仪器倾斜的影响,实现自动安平. 特点: 用吊丝将十字丝板悬吊起来,相对仪器做反方向摆动。 2.改变视线型 仪器倾斜的同时,通过悬吊的补偿棱镜,使正确的标尺读数平移到十字丝上,实现自动安平. 特点: 在物镜与十字丝之间用吊丝悬吊反射棱镜.应用最广泛.
温度变化的影响
主要是气泡的变化,在外业观测中可以看到,当玻璃管和内部液体在太阳辐射影响下而变热 时,则气泡移向太阳一边,因此,夏天在野外施测时,要打遮阳伞.更明显而又直观的是,由于温 度变化而引起气泡长度的改变对水准管灵敏度的影响.水准器内灌注的酒精和乙醚,都是冰 点低挥发性大的液体,对温度的变化非常敏感.当气温升高时,液体迅速膨胀,气泡体积缩小, 长度变短,因此灵敏度降低.在实际中,要注意防止由于温度的变化而对测量结果的影响.
.符合水准器部分
符合水准器气泡影象应符合下列几点要求 1.长水准器两端的分划线应重合成一直线(没有可分划线的无此要求) 2.左右气泡的影象宽度应相等,其气泡两头的符合影象基本为圆弧性 3.左右气泡的分界线要细而清晰,影象要明晰而不能有暗影. 调整时,只要动相应的直角棱镜和符合棱镜,就可以排除故障
二.光学经纬仪部分
竖盘指标自动归零大多数光学经纬仪的指标是固定的要实现竖盘指标自动归零只需将指标与竖盘之间的光学棱镜悬吊起来使倾斜后的指标影象自动归于90的铅垂位置即实现自动归零用经纬仪观测角度时首先要在测站上安置仪器包括对中和整平整平的目的是使仪器竖轴居于铅垂位置即水平度盘水平
维修专题
仪器维修与保养
一.水准仪部分
2.ห้องสมุดไป่ตู้动安平水准仪
从以上分析可知,直到目前为止,水准器还是测量仪器上的一个薄弱环节.它要求既严格,制 造又麻烦,受外界条件变化的影响又大.而在作业过程中,要使气泡居中也是一件费时的工作. 尤其在精密水准测量时,为了使气泡精确地符合,往往要花费观测的大部分时间.观测时间一 拉长,由于外界条件的变化,又给观测成果带来了不良影响.这一直是测量工作的一个难题. 为此,自动安平水准仪就应运而生.
轮廓度仪教材

CV-3000 轮廓度仪培训1.环境、保养温度: 20 °C+/-1°湿度:55%-65%远离振源定期加润滑剂定期检定测针2.设备参数结构:主装置(z轴(X轴、角度)微调、测针臂、测针、配重块配置)+工作台+控制台+轮廓装置测针类型:one-sided cut stylus sph-71 20*12°测杆类型:Straight arm: ABH-71 * 200 mm探针设置:Setup\set machine3. 测量条件设置:Setup\set measconditionA. Meas length: 设置测量长度B. Sampling method ----#1 x-axis pitch 按点来计算#2 line scgment pitch 按线或线段来计算C. Meas pitch :设置测量每个点间的距离D. Auto-return: 设置以什么方式返回E.over-range: 设置在超出范围时以什么方式结束Abort:停止 continue:继续F.vibrator 振动G.display: 设置标签名或其它属性的显示H. Measuring speed: 设置测量速度M.Tracing direction :设置测针以推或拉的方式进行滑动N.Meas position: 设置在哪个方向上以某个具体位置开始测量4. set comp condition 设置补偿A.Stylus radius compensation 测针半径补偿B.z-axis gain adjustement ration 调整z方向的高度5. 开始清零对话框里设置参数Relative move 相对坐标:相对当前位置Absolut move 绝对坐标:相对机器原点Move with height held: 升高,不返回Move after raising: 升高后,返回Move with holding at midpoi: 升高到具体位置,开始移动Move after down: 探针向下移动Read position: 读取当前机械位置6. 开关机顺序7. 探针校正A. 校正轮廓仪测针压力(30MN 或30g),调整配重块的位置方式来调整测量压力.B. 校工作台水平,调至5umC. 校X方向用标准件3.9998的R规将测针放在R规上,点击“Measurement \calibrate\至到出现对话框“Measure” ,进入“Measure”,直至完成,按测量符号,开始测量,在出现的对话框中输入日期,保存R的补长值。
1.2 光学轮廓术回顾_光学轮廓术_[共6页]
![1.2 光学轮廓术回顾_光学轮廓术_[共6页]](https://img.taocdn.com/s3/m/c41eef013186bceb18e8bbb6.png)
第1章 绪论21.2 光学轮廓术回顾1985年,Jalkio Kimand 和Case 对主要的光学三维测量方法已经作过分类,但现在看来,这种分类方法存在不完善之处。
结合光学三维测量技术的最新进展,本书对已有的光学三维测量方法进行了重新分类,如图1-1所示。
图1-1 光学轮廓术的分类激光测距仪测量法也叫飞行时间(Time of flight )法,是自1971年发展起来的一种测量方法,它利用光在空气中的传播速度为一定值的原理,由光速测距仪主动发出脉冲,在遇到物体表面时反射回来,根据脉冲在测距仪与物体表面之间的飞行时间就可测得距离。
斯坦福大学的激光测距系统测得的图像像素为128×128,物体表面与测距探测仪的距离为1~5m ,测量所需时间为2h 。
加州理工学院喷射推进实验室(Jep Propulsion Laboratory )研制的系统从相距1~3m 的物体测得像素为128×128的图像只需3min ,测量精度为2cm 。
澳大利亚的Jarvis 研制的系统从相距1~4m 的物体测得像素为64×64的图像只需40s ,测量精度为0.5cm 。
激光测距仪测量法具有以下优点。
① 基于向物体发射能量,不存在盲区(Missing part )。
② 对物体表面性质(颜色、质地、纹理)不加限制。
1.2 光学轮廓术回顾3③ 可直接进行绝对测量。
④ 无需取得图像及对图像作分析处理。
该方法的缺点是系统复杂,测量精度低,测量时间长,只适合于特大型物体的测量。
1969年,Hildebrand 和Haines 从相干光学的观点出发,提出了一种采用双波长光源的全信息等高技术。
它可以在物体上生成等高线,等高线的分辨率取决于光源波长,且不能任意变化。
Hildebrand 和Haines 提出的另一种方法是由两个具有不同波长的点光源产生的干涉条纹在物体上生成等高线,与第一种方法相比,第二种方法产生的等高线图的分辨率可以从波长级变化到忽米级。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光电子微纳制造工艺平台应用培训讲义(2008下学期)
--WYKO NT1100 光学轮廓仪
NT1100可对表面进行快速、重复性高、高分辨率的三维测量,测量范围可从亚纳米级粗糙度到毫米级的台阶高度。
NT1100给MEMS、厚膜、光学元件、陶瓷和先进材料的研发和生产提供了一个精确的、价格合理的计量方案。
一、检测原理:
该设备是一台利用干涉相位差与检偏器方位角成线性关系的微分干涉显微镜.应用相移干涉技术,实现对表面轮廓的高精度测量。
在一般场合下测量精度Z向可优于1nm.
基于此原理,对试样的要求:
1.该设备所测量的试样,要求表面一定要光滑,粗糙度很低.
2.并且横向(即X-Y面),几何尺寸必须大于13微米以上的区域,信息才能够被设备识别.
3.测试金属样品,会带来波长量级的测试误差.
二、操作步骤:
1. 开机顺序
(1)将气浮隔震台的气路打开。
(2)打开光学轮廓仪的电源开关(在设备后面的右下方)
(3)打开光学轮廓仪前面的显示屏。
(4)打开电脑主机,打开软件,进入软件界面如图1所示
图1
2. 调节设备Z轴,在设备的前部显示屏中出现清晰的试样图像为止。
再微调Z轴使之出现干涉波纹。
3. 点击软件工具栏的图标,出现图2的界面。
图2
4. 此型号光学轮廓仪可以测量两种类型的试样,分别为镜面光洁度的试样采用PSI模式测量,而具有台阶深度在10微米及以上的试样采用VSI模式测量。
本次就以VSI模式测量为例介绍具体的操作步骤。
5. 首先将设备的配件调制VSI模式。
6. 在软件界面中选中Measurement Options,将Measurement Type 设为VSI(Infinite Scan)如图3所示。
图3
7. 选中界面VSI Options,出现图4的界面,调节Backscan和Length的数值。
即为台阶的高度和深度。
图4
8. 点击软件工具栏的图标,在电脑中显示衍射波纹,同时进一步调节Z轴的调节器,调节直至图象上红颜色部位刚刚消失为止。
9. 点击软件工具栏的图标,得出图5所示的图象。
图5
10. 将图形调水平步骤,在图5界面中单击右键出现一个下拉菜单,在菜单中选击Analysis
Options选项,如图6所示。
11. 如图7所示出现如下界面
12. 选中Masking选项,得到图8的界面
13. 选中Use Terms Mask选项,点击Edit Terms Mask图标,得到图9所示的界面。
14.在界面中选择比较平整的部位,再将其他部位去除。
得到图10所示的界面。
15.点击ok就可以得到如图11所示界面。
16. 此时点击图标对表面形貌进行分析,如图12所示。
17. 点击图标可以获得图13所示的3D图形。
18. PSI模式的测量步骤与VSI模式基本相同,在此不在熬述。