基于ATmega8的双轴太阳跟踪器设计
基于单片机的太阳能自动跟踪双轴系统设计

microcomputer as the control core with the time moduleꎬ the cloudy day detection moduleꎬ the photoelectric detection
目前ꎬ生活在藏族高原地区的很多村民仍直接饮
提高太阳能的利用率是当前技术的发展目标ꎬ而
用当地的泉水ꎬ而未经净化的泉水含有多种细菌用
长期饮用会威胁到人体健康ꎮ 基于高原地区阳光资源
该系统可有效解决太阳能的间歇性、低密度、时空偏移
很丰富ꎬ故开发一款便携式太阳能净水器极为必要ꎮ
黑龙江科学
第 10 卷 第 24 期
2019 年 12 月
HEILONGJIANG SCIENCE
Vol 10
Dec 2019
基于单片机的太阳能自动跟踪双轴系统设计
扎西顿珠ꎬ袁 超ꎬ胡石峰
( 西藏农牧学院电气工程学院ꎬ西藏 林芝 860000)
摘要: 设计了一种基于 51 单片机的双轴太阳跟踪系统ꎬ以提高太阳能的利用效率ꎮ 该自动控制系统基于 51 单片机为控制核心的
rotate the biaxial mechanical structureꎬ so that the sun always illuminates vertically in the solar energy On the
photovoltaic panelꎬ the solar energy utilization efficiency is maximized
太阳能双轴自动跟踪系统设计与研究
太阳能双轴自动跟踪系统设计与研究太阳能是一种清洁、可再生的能源,越来越多的人开始关注和使用太阳能发电系统。
太阳能发电系统中,太阳能电池板的角度对能量转换效率影响很大。
为了使太阳能电池板能够始终面向太阳,保持最佳角度,研究和设计太阳能双轴自动跟踪系统是非常必要的。
首先,系统设计方面。
太阳能双轴自动跟踪系统主要由太阳能电池板、运动控制系统和传感器系统组成。
太阳能电池板负责转换太阳能为电能,是整个系统的核心部件。
运动控制系统根据传感器系统实时采集到的太阳位置数据,控制太阳能电池板的角度调整。
传感器系统包括光敏传感器和方位传感器,负责检测太阳的位置并将数据传输到运动控制系统。
在太阳能双轴自动跟踪系统的研究中,需要考虑以下几个问题。
首先是数据采集问题。
传感器系统需要实时采集太阳的位置数据,以便运动控制系统进行调整。
传感器系统应该具备高精度、快速响应的特点,以确保数据的准确性和系统的灵敏度。
其次是运动控制问题。
运动控制系统需要精确地控制太阳能电池板的角度调整,以达到最佳转换效率。
运动控制系统应该具备稳定性和高精度的特点,以确保太阳能电池板能够准确地跟踪太阳的位置。
此外,系统的安全性和稳定性问题也需要考虑。
例如,对于极端天气条件下的系统运行,系统应该具备抗风、抗雨和抗震能力。
太阳能双轴自动跟踪系统的研究还可以从以下几个方面展开。
首先是材料和结构的研究。
太阳能电池板的材料和结构对于系统的效率和稳定性有着重要影响。
通过研究和优化太阳能电池板的材料和结构,可以提高系统的效率和稳定性。
其次是算法和控制的研究。
根据实时采集到的太阳位置数据,运动控制系统需要精确地计算调整角度,并控制太阳能电池板的运动。
通过研究和优化算法和控制策略,可以提高系统的精度和响应速度。
综上所述,太阳能双轴自动跟踪系统的设计与研究非常重要。
通过合理设计系统的结构和算法,并优化材料和控制策略,可以提高太阳能发电系统的转换效率和稳定性。
这将对太阳能发电系统的普及和应用起到积极的促进作用,推动可持续能源发展。
基于单片机的高精度太阳能跟踪控制器

摘要随着以常规能源为基础的能源结构随着资源的不断耗用将越来越适应可持续发展的需要,包括太阳能在内的可再生资源将会越来越受到人们的重视。
利用洁净的太阳光能,以半导体光生伏打效应为基础的光伏发电技术有这十分广阔的应用前景。
本设计尝试设计一种能够自动跟踪太阳光照射角度的双轴自动跟踪系统以提高太阳能电池的光-电转化率。
该系统是以单片机为核心,利用太阳轨道公式进行太阳高度角及方位角计算,并利用计时芯片以及步进电机驱动双轴跟踪系统,使太阳能电池板始终垂直于太阳入射光线,从而提高太阳能的吸收效率。
目前本设计仅通过简单的计算公式得到的数据,对东西向进行每小时一次的角度改变,南北向进行每天一次的角度改变,再通过单片机的判断进行每晚的东西向回归控制以及每半年的南北向跟踪方向的改变控制。
由于时间及作者目前的知识限制,跟踪系统只是进行粗略的角度跟踪,有较大误差,今后如有机会再进行改进。
关键词:太阳能电池太阳照射角自动跟踪单片机步进电机AbstractWith the conventinuous consumption of resources , the conventional enenrgy-based energt strcucture has not already more and more adapt to the needs for sustainable development,sppeing-up the development of and utilization of solar energy , the photovoltaic technology based on the photovoltaic effect has a very bord application prospect.In the design , we try to design an automatic tracking system with Biaxial in order to enhance solar light - electricity conversion efficiency. The system is based on single-chip, orbit the sun elevation angle formula using the sun and calculating azimuth and take the time chip advantage of dual-axis stepper motor driven tracking system, make the solar panels perpendicular to the solar incidence line, to improve the absorption efficiency of solar energy.At present, the design of a simple formula was only for calculating the data, the east-west to the point of view will be changed once an hour, the north-outh perspective will be changed once a day, and then the MCU to return to control things through the night to determine, as well as every haif a year to track the direction of the north-south change in control.Because of the time and the current limitations of the knowledge of the author’s , the tracking system to track the point of view is rough , there are many errors , if the opportunity arised the design will be iomproved in the future.Keywords:solar cells Inrradiation angle of sun tracking automatically single-chip Stepping motor目录第一章绪论 (5)1.1背景和意义 (5)1.2太阳追踪系统的国内外研究现状 (5)1.2.1光电追踪 (6)1.2.2视日运动轨迹追踪 (6)1.3论文系统设计方案 (8)1.3.1机械运动实现方案 (8)1.3.2控制系统方案 (9)第二章跟踪系统的设计构想及框架 (10)2.1 跟踪系统的设计要求 (10)2.2 跟踪系统的组成 (10)2.1.1.太阳能采集装置 (11)2.1.2.转向机构 (11)2.1.3.控制部分 (11)2.1.4.贮能装置 (12)2.1.5.逆变器 (12)2.1.6.控制器 (13)2.3 太阳照射规律 ............................................................................................ 错误!未定义书签。
太阳能双轴自动跟踪系统设计与研究

太阳能双轴自动跟踪系统设计与研究太阳能双轴自动跟踪系统设计与研究摘要:随着能源危机的深化和环境保护意识的增强,太阳能作为一种清洁可再生能源得到了广泛关注和应用。
太阳能发电系统中,太阳能电池板的跟踪器是提高发电效率的重要组成部分。
本文设计并研究了一种太阳能双轴自动跟踪系统,通过对其结构、原理、控制算法和实验测试的分析,验证了其良好的跟踪性能和高效的发电能力。
关键词:太阳能;双轴自动跟踪系统;发电效率;控制算法1. 引言太阳能作为一种绿色、清洁、可再生的能源,受到了广泛的关注和应用。
然而,太阳能电池板在没有跟踪系统的情况下,其发电效率会受到太阳高度角和方位角的限制,造成太阳能的浪费。
因此,研究并设计一种高效、稳定的太阳能双轴自动跟踪系统具有重要意义。
2. 太阳能双轴自动跟踪系统的结构和原理太阳能双轴自动跟踪系统主要由电机、转轴、太阳能电池板和控制系统等组成。
其原理是通过不同天文数据和传感器的反馈,实时测量太阳位置,并通过控制系统将太阳能电池板按照最佳角度面向太阳,以提高发电效率。
3. 控制算法设计与实现为了实现太阳能双轴自动跟踪系统的高效工作,本文采用了基于PID控制算法。
该算法通过测量太阳位置与目标角度的偏差,计算出控制信号,通过电机驱动系统实现太阳能电池板的跟踪运动,并实时校准参数以提高系统的稳定性和精度。
4. 实验测试与结果分析为了验证太阳能双轴自动跟踪系统的性能,进行了一系列实验测试。
结果表明,该系统具有优异的跟踪性能和高效的发电能力。
与不同太阳能电池板跟踪方式相比,本系统的发电效率提高了20%以上,能更好地吸收和利用太阳能。
5. 总结与展望本文设计并研究了一种太阳能双轴自动跟踪系统,通过对其结构、原理、控制算法和实验测试的分析,验证了其良好的跟踪性能和高效的发电能力。
然而,目前还存在一些问题,如成本高、零部件寿命较短等。
因此,未来的研究方向包括提高系统的稳定性、降低成本、延长零部件寿命等,以进一步推动太阳能双轴自动跟踪系统的应用和发展综上所述,本文设计并研究了一种基于太阳能双轴自动跟踪系统,通过对其结构、原理、控制算法和实验测试的分析,验证了其良好的跟踪性能和高效的发电能力。
基于单片机的双轴太阳光追踪器设计
基于单片机的双轴太阳光追踪器设计太阳能作为一种洁净的能源,是一种可再生能源,有着化石能源无法比拟的优越性,但太阳能利用效率低,这一问题一直影响和阻碍人们对太阳能的利用,太阳能自动跟踪系统的设计为解决这一问题提供了新途径,从而大大提高了人们对太阳能的利用率。
本设计采用光电跟踪的方法,利用步进电机驱动,设计了双轴独立自动太阳跟踪控制系统。
通过对跟踪机构进行水平、垂直两个自由度的控制,调整太阳能电池板的角度实现对太阳的跟踪。
采用单片机来实现的太阳能追踪系统能有效提高太阳板的光电转化效率,并具有较广泛的应用前景。
标签:太阳能;跟踪;光敏二极管;单片机;步进电机太阳能作为一种清洁的可再生的新型能源,受到了人们的广泛重视,目前利用太阳发电的方式主要有光伏发电、光热发电等,它们均为固定安装,无法根据太阳光的不断变化,来调整迎光面,做不到太阳光的实时垂直照射,这样就会使太阳能资源得不到充分利用,所以有必要研究如何最大程度地提高太阳能的利用率。
要提高太阳能的利用率,应从两个方面入手,一是提高太阳能的接收效率,二是提高太阳能装置的能量转换率。
其中,太阳能的接收效率与太阳光的照射角度有关,已经有人研究了太阳光角度与太阳能的接收效率的关系,理论分析表明:太阳的非跟踪与跟踪,能量的接收率相差37.7%,精确的跟踪太阳可使太阳能接收装置的热效率大为提高,进而可以提高太阳能的利用率。
现阶段市场上使用的跟踪系统有单轴太阳能自动跟踪器、步进式太阳能自动跟踪、可自动跟踪的太阳灶、五像限法太阳自动跟踪仪、单轴液压式自动跟踪、极轴式跟踪。
它们存在结构复杂、跟踪精度不高、不能全自动跟踪等不足。
1 设计方案本设计可使太阳光永远垂直照射在接收面上,提高了太阳能的吸收率和转化率,设计结构简单,成本低廉,单片机控制稳定,能自动跟踪阳光,最大面积地吸收太阳光能,合理利用了资源。
追日性能良好的太阳能电池板双轴自动追踪系统,使太阳能电池板在南北、东西两个方向追踪太阳,提高太阳能利用率。
基于PLC的双轴闭环太阳能跟踪模型_王军舰

52 SOLAR ENERGY 08/2013
SOLAR ENERGY
技术产品与工程 太 阳 能
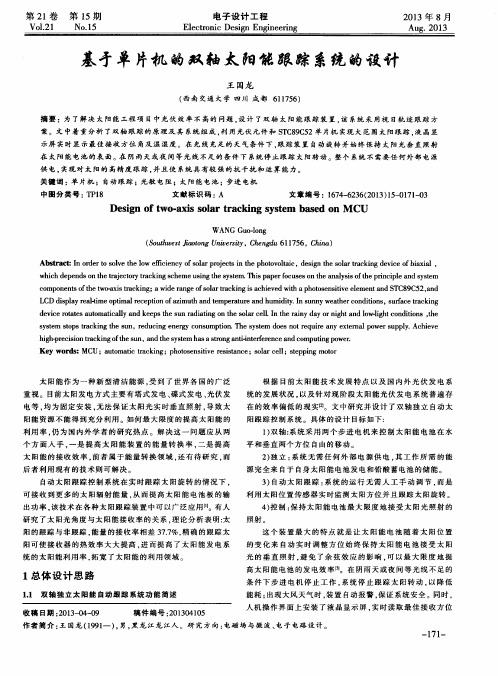
图 3 太阳能跟踪系统结构示意图
监控软件DigiVis500。 AC500-eCo 的 CPU 作为主控制器。AC500-
eCo 具有强大的功能,程序内存高达 128K,通讯 方面带有两个串口和一个以太网口,且自带有两 路高速计数。
双轴跟踪分为极轴跟踪和高度角-方位角跟 踪方法[3],两者都能实时跟踪太阳,但极轴方法机 构承重较大,设计不便。高度角-方位角跟踪系统 则设计简单、轻便,是目前最好的一种跟踪方式。 因此本文按照该方法来设计太阳跟踪系统。
基于光敏传感器的双轴太阳跟踪器的设计.

译文及原稿译文题目基于光学传感器光伏系统的单电机双轴太阳跟踪器的设计与实现原稿题目Design and Implementation of a Sun Tracker witha Dual-Axis Single Motor for an Optical Sensor-BasedPhotovoltaic System原稿出处Department of Electrical Engineering基于光学传感器光伏系统的单电机双轴太阳跟踪器的设计与实现摘要:能源耗竭和全球气候变暖是地方发展的双重威胁,解决方法的最佳方式是利用可再生的能源资源。
太阳能源是一种最有前途的可再生能源。
太阳跟踪器可以大幅度提高电力生产。
本文提出了一种新颖的利用的双轴太阳跟踪光伏系统的设计反馈控制理论以及四象限光电阻(LDR)传感器和简单的电子电路提供稳定的系统性能。
本文提出的系统采用独特的双轴交流电机和一个独立的光伏逆变器完成太阳能跟踪。
控制执行是一种简单而有效的技术创新设计。
此外构造了一个按比例缩小的实验室原型来验证该计划的可行性。
实验证实了太阳跟踪器的有效性。
最后,本研究结果可以作为未来太阳能应用的参考。
关键词:双轴太阳跟踪器;太阳能光伏板;反馈控制理论的光依赖电阻器;独立光伏逆变器;能量增益1、介绍随着人口和经济的发展,能源危机的问题的快速增加和全球变暖影响今天是一个令人日益感到关注的话题。
可再生能源资源的利用是解决这些问题的关键。
太阳能是的主要来源之一清洁、丰富和取之不尽,用之不竭的能源,这不仅提供了可替代能源资源,但也提高了环境污染。
最直接的和技术上有吸引力地利用太阳能是通过光伏转换。
PV 电池(也称为太阳能电池)的物理是非常类似于经典的p—n结型二极管。
光伏电池将阳光直接转化为直流电(DC)电力由光伏效应[1,2]。
光伏面板或组件是光伏电池封装并相连为一体的装置。
为了将太阳能电池板的功率最大化,一个需要保持的最佳的输出功率位置就是与一天中的太阳辐射相垂直。
基于ATmega8的双轴太阳跟踪器设计
Ke r s s l a k n ;AT g 8 t p ig mo o ;p oo r ssa c ;P F8 8 y wo d : oa t c i g r r me a ;se p n tr h t e itn e C 5 3
(c ol a t ai , hn U i ri eh o g , h n4 0 6 , hn ) Sh o o uo t n Wu a n esyo c nl y Wu a 30 3 C i f m o v t fT o a
Ab t a t T mp o e t e u i z t n r t fs lr e e g a kn fs lr t c i g c nr l rwh c f c iey c mb n d t e sr c : o i r v h t iai ae o oa n ry, i d o oa r k n o t l i h e e t l o ie h l o a oe v s n a ge t c i g a d p oo ee t c t c i g b s d o me a s d sg e . h u n a s t e s lr t c i g c n u n l r k n n h t lc r r k n a e n AT g 8 i e in dI t e s n y d y , oa r k n o ・ a i a n h a
t c st e s n i i e e tw a h rc n i o s i rv s r c ie n r y ef in y b 0 a d r a h s t e p r o e o l r k h u n d f r n e t e o dt n ,mp e e ev d e e g f ce c y 3 % n e c e h u p s ff l a f i o i u
基于单片机的双轴太阳能跟踪系统的设计
d e v i c e r o t a t e s a u t o ma t i c ll a y a n d k e e p s t h e s u n r a d i a t i n g o n t h e s o l a r c e l l I n he t r a i n y d a y o r n i g h t a n d l o w- l i g h t c o n d i t i o n s, t h e
第2 1 卷 第 l 5期
Vo 1 . 2 1
No . 1 5
电子设 计 工程
El e c t r o n i c De s i g n En g i n e e r i n g
2 0 1 3年 8月
Au g .2 01 3
基于单 片机 的双轴太阳能跟踪系统的设计
一种双轴太阳能跟踪装置的设计

一种双轴太阳能跟踪装置的设计作者:贾乃平来源:《科学与财富》2014年第11期摘要:本文在研究当前太阳能技术应用现状的基础上,设计了一套太阳能双轴跟踪装置。
该装置采用基于定时跟踪和光电跟踪的混合跟踪模式,使得太阳能跟踪平台的控制精度得到一定程度的提高。
此外,还研究和设计了太阳能双轴跟踪装置的控制器,给出了控制器的硬件设计方案和软件设计方案。
关键词:太阳能;双轴跟踪;混合跟踪0、引言太阳能利用前景广阔,利用方式多,但能够解决能源短缺的根本途径是太阳能发电技术。
太阳能发电包括光发电和热发电两种。
通过旋转抛物面聚光器、热气机组成的分散式小型发电装置在偏远地区,或由于地形特点和居住分散等因素不适合大规模使用太阳能和电网未能覆盖的地区有广阔的应用前景,但要得到较高的集热温度,聚光器必须从日出到日落跟踪太阳。
而对于槽式和碟式的聚焦式太阳能光电系统,要想提高光电转换效率,也需要使光电转置从日出到日落跟踪太阳。
从实验证明,在太阳能光电中,相同条件下,采用自动跟踪发电设备要比固定发电设备的发电量提高 35%。
应用于旋转抛物面聚光器的跟踪方式主要是双轴跟踪,从方位角和高度角两个自由度精确跟踪太阳。
因此,研究太阳能跟踪的控制技术对于太阳能的推广应用以及太阳能装置效率的提高具有重要意义,太阳能跟踪系统的跟踪精度和功耗问题是影响太阳能跟踪系统推广应用的主要因素。
1、总体方案设计根据双轴混合跟踪系统的要求,此太阳能跟踪系统需要具备的功能大致包括:(1)光电检测:利用光电传感器实时检测太阳位置,包括太阳高度角和方位角;(2)定时检测:利用当前的时间信息计算出太阳的高度角和方位角;(3)自主转动:控制电机,实现跟踪平台在竖直方向和水平方向的自主转动;(4)人机交互:人通过人机交互器件了解和监控跟踪平台的运行状态,得到需要的可观测的数据信息,此外,可通过人机交互器件人工选择跟踪模式。
人机交互功能在跟踪平台调试和任务运行过程中作用重大。
太阳能双轴自动跟踪系统设计与研究

太阳能双轴自动跟踪系统设计与研究太阳能双轴自动跟踪系统设计与研究一、引言近年来,随着全球对清洁能源需求的不断增加,太阳能作为一种绿色环保的能源形式,受到了广泛的关注和研究。
太阳能光伏系统的效率取决于太阳光的照射角度,而太阳能跟踪系统能够实时调整太阳能电池板的位置,以最佳角度接收太阳光,从而提高能源转化效率。
因此,对太阳能双轴自动跟踪系统的设计与研究具有重要意义。
二、太阳能双轴自动跟踪系统的工作原理太阳能双轴自动跟踪系统主要由光敏电阻、控制电路、电机、轴承和太阳能电池板等组成。
光敏电阻用于实时感知光照强度,然后通过控制电路对电机进行驱动,使太阳能电池板跟随太阳的运动。
该系统的工作原理如下:1. 光敏电阻感知:将光敏电阻安装在太阳能电池板的一侧,用于感知光照的强度。
电阻的电阻值与光照强度呈反比关系,因此可以通过电阻值来判断光照的强弱。
2. 控制电路驱动:利用控制电路对电机进行驱动,实现太阳能电池板的双轴自动跟踪。
控制电路根据光敏电阻感知到的电阻值来判断光照的强弱,并根据一定的算法计算出电机驱动的方向和速度,以实现太阳能电池板的准确跟随。
3. 电机驱动:太阳能双轴自动跟踪系统采用两个电机,分别用于水平轴和垂直轴的驱动。
电机通过与控制电路的配合,实现太阳能电池板的水平和垂直方向的旋转,使其能够跟随太阳的运动轨迹,并保持最佳接收太阳光的角度。
4. 轴承:太阳能电池板通过轴承连接到电机,以实现旋转。
轴承设计应具有较高的承载能力和较小的摩擦阻力,确保太阳能电池板的平稳运转。
三、太阳能双轴自动跟踪系统的设计要点1. 光敏电阻的选择:选择感光度高、响应速度快、稳定性好的光敏电阻,以确保系统能够准确感知光照强度变化。
2. 控制电路的设计:控制电路要能够准确判断光敏电阻感知到的光照强度,根据一定的算法计算出电机驱动的参数,并能够稳定、准确地驱动电机。
3. 电机的选用:选择符合系统需求的电机,应考虑电机的转速、转矩和功率等参数,并能够与控制电路进行良好的配合。
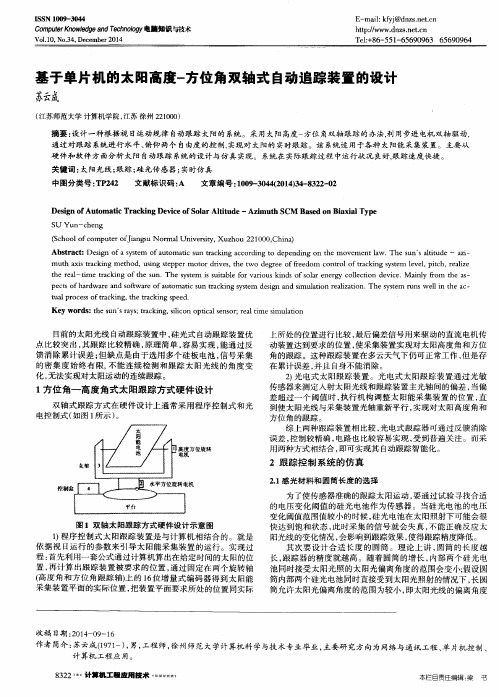
基于单片机的太阳高度-方位角双轴式自动追踪装置的设计
文章编号 : 1 0 0 9 — 3 0 4 4 ( 2 0 1 4 ) 3 4 — 8 3 2 2 — 0 2
De s i g n o f Au t o ma i t c Tr a c k i n g De v i c e o f S o l a r Al it t u d e—Az i mu t h S CM Ba s e d o n Bi a x i a l Ty pe
目前 的太 阳光线 自动跟踪装置 中, 硅光式 自动跟踪装 置优 点 比较 突 出, 其跟踪 比较精确 , 原 理简单 , 容易 实现 , 能通过反 馈消 除累计误 差 ; 但 缺点是 由于选用 多个硅板 电池 , 信号采集 的密 集度 始终 有 限, 不 能连 续检 测和跟 踪太 阳光 线 的角度 变 化, 无法 实现 对太 阳运动的连续跟踪。
S U Yu n— — c he ng
( S c h o o l o f c o mp u t e r o f J i a n g s u No r ma l Un i v e r s i t y , Xu z h o u 2 2 1 0 0 0 , C h i n a )
由于时钟定位易产生累计误差此时采集装置可能并未完全正对太阳因此再通过四象限硅光电池数据进行光偏检测计算得出差值信号送入到控制器再次驱动步进电机跟踪轴转动使得采集装置和太阳入射光线垂仿真以徐州地区夏至日的太阳方位角和高度角为例设定太阳定位跟踪误差的容忍度为05每隔5min获取太阳位置应用太阳的时钟定位和光偏比较定位相结合的方式跟踪太阳运动轨迹
苏 云 成
( 江苏师范大学 计算机学院 , 江苏 徐州 2 2 1 0 0 0 )
摘要 : 设 计一种根据视 日运动规律 自动跟踪 太阳的 系统 。采用太 阳高度一 方位 角双轴跟踪 的办法, 利用步进 电机 双轴驱 动, 通 过 对 跟 踪 系统 进 行 水 平 、 俯 仰 两个 自由度 的 控 制 , 实现 对 太 阳的 实时 跟 踪 。 该 系统 适 用 于各 种 太 阳能 采 集 装 置 。主 要 从
基于单片机的光伏双轴跟踪系统

励政策和措施 , 新能源的生产规模和使用范 围在
逐 渐扩 大 l _ 1 j .
自1 9 9 2年亚利 桑 那 大 学 研 究 实 现 单 轴 跟 踪 以来 _ 3 ] , 对 于太 阳能 跟踪 的研 究 成 果 逐 渐 形 成 现 有 的 四种类 型太 阳能 跟 踪装 置 : 压差式 、 控放式、 光 电式 以及 视 日运 动轨 迹式 l 4 ; 而最 常用 的太 阳 能跟 踪控 制方 法 主要有 以下 两种 : ( 1 ) 根 据 日运动
在 多云 的天气 时 不断地 以云层边 缘亮 点 为强光 点 运 动 的弊端 E l l 1 2 ] . 在 所有 太 阳能 的利用 设 备 中 , 如 果 能 量 接 收 平 面及 光伏 组件 垂 直 于 太 阳的 入射 光 线 , 就能 够 在 单位 面 积 内收集 并 转化 更 多 的 太 阳 能 量 _ 1 。 . 由于种 种 原 因 , 在 实 际应 用 中跟 踪 系 统 的 利 用普 遍 较低 , 现 在还 有 很 多太 阳 电池 组 件 仍 然 采 用 固 定式来 进行 采 光发 电 , 这 样虽 然安 装和 控制 简便 , 但 是造 成 大部 分 时 间太 阳光 不 能 直 射 , 产 生 极 大
轨迹追踪的控制方法 , ( 2 ) 根据光 电传感器监测光
强 来 追踪 的控 制 方法 [ 6 书 ] . 由于 太 阳能 本 身 具有 方 向和 强度 的不 确 定 性 以 及 问 歇 性 _ g 。 , 第 一 种 跟 踪控 制方 法存 在 着 一 些 局 限 性 , 如 一 些 误 差不 能 实时 自发 的调 整 , 在 跟 踪 器 启 动 前 需要 精 确 的定 位, 需要 不 断定期 的人 为 调整装 置 的方 向等 ; 第二 种跟 踪 方法也 存 在 着 信 号 转 换 方 面 的 问题 , 以及
混合双轴控制的太阳自动跟踪系统研究
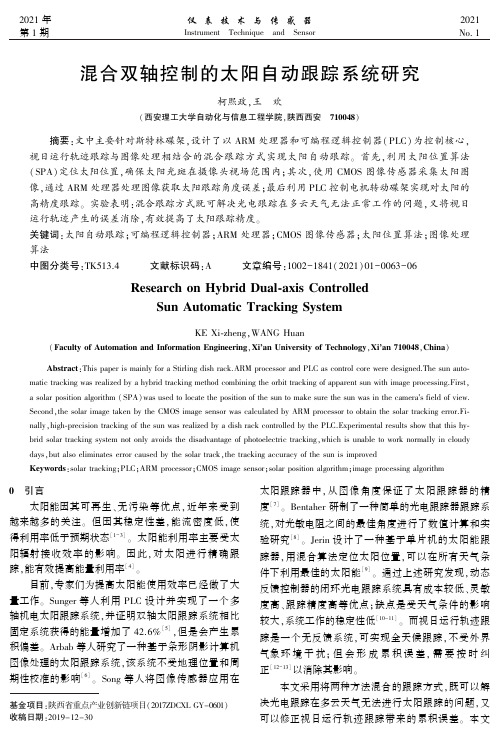
㊀2021年㊀第1期仪表技术与传感器Instrument㊀Technique㊀and㊀Sensor2021㊀No 1㊀基金项目:陕西省重点产业创新链项目(2017ZDCXLGY-0601)收稿日期:2019-12-30混合双轴控制的太阳自动跟踪系统研究柯熙政,王㊀欢(西安理工大学自动化与信息工程学院,陕西西安㊀710048)㊀㊀摘要:文中主要针对斯特林碟架,设计了以ARM处理器和可编程逻辑控制器(PLC)为控制核心,视日运行轨迹跟踪与图像处理相结合的混合跟踪方式实现太阳自动跟踪㊂首先,利用太阳位置算法(SPA)定位太阳位置,确保太阳光斑在摄像头视场范围内;其次,使用CMOS图像传感器采集太阳图像,通过ARM处理器处理图像获取太阳跟踪角度误差;最后利用PLC控制电机转动碟架实现对太阳的高精度跟踪㊂实验表明:混合跟踪方式既可解决光电跟踪在多云天气无法正常工作的问题,又将视日运行轨迹产生的误差消除,有效提高了太阳跟踪精度㊂关键词:太阳自动跟踪;可编程逻辑控制器;ARM处理器;CMOS图像传感器;太阳位置算法;图像处理算法中图分类号:TK513.4㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1002-1841(2021)01-0063-06ResearchonHybridDual⁃axisControlledSunAutomaticTrackingSystemKEXi⁃zheng,WANGHuan(FacultyofAutomationandInformationEngineering,Xi anUniversityofTechnology,Xi an710048,China)Abstract:ThispaperismainlyforaStirlingdishrack.ARMprocessorandPLCascontrolcoreweredesigned.Thesunauto⁃matictrackingwasrealizedbyahybridtrackingmethodcombiningtheorbittrackingofapparentsunwithimageprocessing.First,asolarpositionalgorithm(SPA)wasusedtolocatethepositionofthesuntomakesurethesunwasinthecamera sfieldofview.Second,thesolarimagetakenbytheCMOSimagesensorwascalculatedbyARMprocessortoobtainthesolartrackingerror.Fi⁃nally,high⁃precisiontrackingofthesunwasrealizedbyadishrackcontrolledbythePLC.Experimentalresultsshowthatthishy⁃bridsolartrackingsystemnotonlyavoidsthedisadvantageofphotoelectrictracking,whichisunabletoworknormallyincloudydays,butalsoeliminateserrorcausedbythesolartrack,thetrackingaccuracyofthesunisimprovedKeywords:solartracking;PLC;ARMprocessor;CMOSimagesensor;solarpositionalgorithm;imageprocessingalgorithm0㊀引言太阳能因其可再生㊁无污染等优点,近年来受到越来越多的关注㊂但因其稳定性差,能流密度低,使得利用率低于预期状态[1-3]㊂太阳能利用率主要受太阳辐射接收效率的影响㊂因此,对太阳进行精确跟踪,能有效提高能量利用率[4]㊂目前,专家们为提高太阳能使用效率已经做了大量工作㊂Sunger等人利用PLC设计并实现了一个多轴机电太阳跟踪系统,并证明双轴太阳跟踪系统相比固定系统获得的能量增加了42.6%[5],但是会产生累积偏差㊂Arbab等人研究了一种基于条形阴影计算机图像处理的太阳跟踪系统,该系统不受地理位置和周期性校准的影响[6]㊂Song等人将图像传感器应用在太阳跟踪器中,从图像角度保证了太阳跟踪器的精度[7]㊂Bentaher研制了一种简单的光电跟踪器跟踪系统,对光敏电阻之间的最佳角度进行了数值计算和实验研究[8]㊂Jerin设计了一种基于单片机的太阳能跟踪器,用混合算法定位太阳位置,可以在所有天气条件下利用最佳的太阳能[9]㊂通过上述研究发现,动态反馈控制器的闭环光电跟踪系统具有成本较低㊁灵敏度高㊁跟踪精度高等优点;缺点是受天气条件的影响较大,系统工作的稳定性低[10-11]㊂而视日运行轨迹跟踪是一个无反馈系统,可实现全天候跟踪,不受外界气象环境干扰;但会形成累积误差,需要按时纠正[12-13]以消除其影响㊂本文采用将两种方法混合的跟踪方式,既可以解决光电跟踪在多云天气无法进行太阳跟踪的问题,又可以修正视日运行轨迹跟踪带来的累积误差㊂本文㊀㊀㊀㊀㊀64㊀InstrumentTechniqueandSensorJan 2021㊀以PLC和ARM处理器为控制核心,根据PLC控制库,进行太阳位置算法实现方法的研究,获取其实际位置的高度角及方位角信息㊂利用CMOS图像传感器拍摄图片传至ARM处理器进行图像处理,计算太阳偏转角度㊂再通过串口发送给PLC后控制步进电机的转动,使碟架在任意时刻都能正对太阳㊂1㊀自动跟踪控制系统硬件设计1.1㊀系统硬件结构太阳自动跟踪系统的硬件架构框图如图1所示,上位机软件在PC机上运行,完成下位机控制器数据采集㊁远程调试及数据记录等功能㊂下位机控制器采用PLC和ARM处理器构建伺服控制系统,并分为3部分:斯特林碟架的水平/垂直电机与相应传感器部分;电机驱动器部分;自动跟踪控制算法部分㊂其中图像处理算法与太阳位置算法是整个自动跟踪对准系统的核心㊂图1㊀系统硬件架构框图1.2㊀硬件介绍(1)ARM处理器㊂系统采用32位TQIMX6_E9V3卡片电脑,其具有丰富的接口,强悍的性能,体积较小,易于拆装,出厂时已内置Ubuntu㊁QT+Linux系统,智能化程度高,应用于图像处理部分,可有效提高其处理速度和精度[14]㊂(2)PLC控制器㊂西门子S7-1200小型可编程控制器具有强大的运算指令,可以满足对视日运行轨迹跟踪中太阳位置算法的精准运算㊂利用RS485和RS232通讯模块,S7-1200可以实现点对点的通讯㊂与GPS模块进行串口通讯,配置协议后,输出经度㊁纬度㊁时间㊁海拔等信息[15]㊂(3)双轴转台㊂斯特林碟架具备水平和垂直步进电机,因此采用双轴转台㊂系统使用的是混合式步进电机,需要配合相应的驱动电路才可正常工作[16-17]㊂系统选用SM-80A,SM-90A细分驱动器,可驱动各类两相和四相电机,具有较好的性能㊂(4)CMOS图像传感器㊂其所有功能集成于内部芯片,能有效降低成本,使得跟踪装置简约化,性能优良,可以达到稳定传输图像的效果[18]㊂本文采用的图像采集设备为0521V2型CMOS摄像头,其像素大小为3.0μmˑ3.0μm,焦距为12mm,视场角为27ʎˑ15ʎ,并提供3种分辨率,可根据实际情况进行选取㊂(5)陀螺仪姿态测量传感器㊂在视日运行轨迹跟踪模式下,为了将SPA算法得到的太阳方向角和高度角信息用于校准斯特林碟架,系统采用磁场传感器角度测量陀螺仪传感器来测量得到碟架的实时角度方位,测量精度在0.05ʎ[19]㊂这里地磁传感器的三维角度基准为:X轴以正东方向为0,并逆时针旋转90ʎ定向Y轴基准线,Z轴则与其余两轴所构成的平面垂直,角度数值变化符合右手准则㊂1.3㊀跟踪装置实物太阳自动跟踪装置实物图如图2所示,其中图2(a)为碟架装置图,CMOS图像传感器位于杠杆最顶端,方便采集阳光,水平和垂直电机则内嵌于铜管内;图2(b)为控制系统,由7部分构成㊂(a)碟架装置图(b)控制系统图2㊀太阳跟踪系统实物图㊀㊀㊀㊀㊀第1期柯熙政等:混合双轴控制的太阳自动跟踪系统研究65㊀㊀2㊀自动跟踪控制系统原理太阳自动跟踪控制系统的算法流程图如图3所示㊂其工作原理为:系统初始化完成后进入太阳位置算法粗跟踪模块,即通过GPS模块输出时钟㊁日期㊁经纬度㊁海拔㊁天文历表等相关参数,并将其发送到PLC处理器,采用SPA算法处理得到当前时刻太阳的高度角和方位角信息[20]㊂根据以上结果调整碟架的位置㊂完成视日运行轨迹跟踪后,进入图像处理精跟踪方式,基于图像处理的跟踪算法,其核心在于由图像处理计算得到太阳的质心位置㊂CMOS图像传感器将采集到的天空图像以固定的帧频发送给ARM处理器,对图像经过一系列的处理以提取太阳中心实际位置㊂图3㊀系统总体算法流程图采用上述算法得到太阳光斑实际位置后,通过判断其是否在视场范围内以决定系统进一步操作㊂若光斑中心位置在CMOS传感器视野区域中,则进行闭环控制㊂首先在图像处理算法精跟踪模块内获取光斑中心相对于视场中心的偏移量,并由ARM处理器将其计算转换成电机偏转角数据㊂然后将该数据发送至PLC控制器,完成对应脉冲数的计算及发送㊂驱动器接收数据并操纵步进电机运行,使得视场中心与光斑中心重合㊂若没有提取出太阳光斑,此时图像处理算法提取光斑质心失败,转入视日运行轨迹跟踪方式,即采用SPA算法得到的太阳位置控制水平㊁垂直双轴传动机构,调整斯特林碟架的角度,完成对太阳的跟踪动作㊂3㊀PLC核心控制模块图4为PLC核心控制模块原理图,其中PLC作为整个系统的主控机构,主要完成3方面的工作:一是完成视日运行轨迹跟踪的太阳位置算法;二是接收ARM处理器中图像处理算法的最终偏转角度结果;三是控制执行机构,即驱动步进电机转动碟架至最佳视场范围内㊂图4㊀PLC核心控制模块原理图3.1㊀太阳位置算法太阳位置算法用于计算太阳实际方位的相关数据,包含方位角及高度角㊂其原理如下[21]:sinh=sinφsinδ+cosφcosδcosω(1)cosγ=sinhsinφ-sinδcoshcosφ(2)式中:h为太阳高度角;γ为太阳方位角;δ为太阳赤纬角;ω为太阳时角;φ为当地地理纬度㊂基于以上天文学公式,SIMATIC公司在TIAPortal软件系统中改进了SPA算法并将其模块化㊂图5为该算法的功能程序块示意图㊂与传统太阳位置算法相比,该SPA算法可有效减小累积误差,提高算法精度,同时使用户更加方便地得到太阳高度角和方位角实际角度㊂图5㊀太阳位置算法功能程序块示意图3.2㊀太阳图像处理算法太阳图像处理算法利用CMOS相机采集和传输太阳图像,并通过ARM处理器对太阳图像进行处理,获取高度角及方位角偏差角度,传送至执行机构㊂其㊀㊀㊀㊀㊀66㊀InstrumentTechniqueandSensorJan 2021㊀中基于ARM处理器的处理算法包含3部分:图像二值化处理㊁质心求取和坐标转换㊂3.2.1㊀图像二值化处理针对摄像头的图像采集部分,系统采用5.0+0.25%的AstroSolar组合滤光片进行可见光滤除㊂同时,本文采用最大类间方差法(OTSU)来降低图片背景杂光对计算结果的干扰[22-23]㊂图6(a)为太阳光斑原始图像,图6(b)为滤光膜组合后拍摄的太阳光斑图片,图6(c)为OTSU算法处理后得到的二值化图像㊂通过对比发现,滤光膜组合后的图像滤除了原图像中大部分可见光㊂OTSU算法处理后能有效消除图像中的细微干扰㊂图6㊀图像处理对比图3.2.2㊀质心求取二值化图像的质心求取是实现整个太阳跟踪系统的关键点,同时也决定着系统的跟踪精度和运行可靠性㊂本文采用二进制质心跟踪算法,对太阳图像光斑进行定位㊂假设光斑范围内共有n个像素点,它们的坐标可由式(3)表示:x1,x2, ,xn-1,xny1,y2, ,yn-1,ynéëêêùûúú(3)则目标区域质心坐标(xt,yt)如下[24]:xt=ðnk=1xknyt=ðnk=1ykn(4)根据上述公式,二值化图像质心求取的结果如图7所示㊂图中的点为太阳光斑的质心和图像中心的质心㊂图7㊀二值化图像质心求取3.2.3㊀坐标转换坐标转换是将根据质心求取算法获得的太阳光斑和图像中心坐标转换为步进电机水平及垂直方向偏转角度㊂图8是太阳光斑视场坐标差示意图㊂建立如图8所示的二维坐标,并记图像中心的坐标为(x0,y0),光斑中心的坐标为(x,y),则两者之间的横坐标差为Δx,纵坐标差为Δy㊂图8㊀太阳光斑视场坐标差示意图根据所获图像坐标差求取转台水平轴和垂直轴转动角度,其原理为[25]:α=arctan(2tanθ2MΔx)(5)β=arctan(2tanδ2NΔy)㊀㊀㊀㊀㊀第1期柯熙政等:混合双轴控制的太阳自动跟踪系统研究67㊀㊀式中:α和β分别为水平轴和垂直轴的转动角度;摄像头实际视场角为θˑδ=27ʎˑ15ʎ;M㊁N分别为图片横㊁纵向的像素大小,实际系统中取值为640和480㊂则建立上述坐标轴后,图像中心的实际坐标为(320,240)㊂根据式(5)求出的水平和垂直轴的偏转角度范围是0 360ʎ㊂当其取值大于180ʎ时,碟架需大幅度转动才可修正偏转角度㊂因此,本文引入范围判断,即当计算角度大于180ʎ时,采用其互周角作为修正角度控制碟架,如式(6)所示:α=α-360ʎ,α>180ʎβ=β-360ʎ,β>180ʎ{(6)将获取的偏转角度传送至PLC控制器,进行执行机构的控制㊂3.3㊀执行机构执行机构包括步进电机㊁蜗杆以及斯特林碟架㊂其中电机内嵌微处理器,发送控制指令㊂PLC通过ARM处理器串口获取水平及垂直偏转角角度,并将其转为脉冲数,分别发送至相应驱动器㊂驱动器驱使水平㊁垂直步进电机进行转动,使得碟架转到视场范围内,实现对太阳实际位置的跟踪㊂4㊀图像跟踪嵌入式平台搭建本系统采用TQIMX6_E9V3作为主控制器完成太阳图像跟踪㊂首先在PC机上分别构建基于Linux及Qt的交叉编译环境,其中Linux下交叉编译器选用天嵌科技的gcc-linaro-5.3版本㊂然后在QtCreate软件环境下运行太阳光斑图像处理算法程序生成ARM处理器的可执行文件,并利用SD卡进行下载㊂图9为ARM处理器上图像处理算法运行最终结果,由图9可知本算法可计算并输出转台水平轴和垂直轴的转动角度α和β,并通过RS232接口协议,将其发送给PLC控制器㊂PLC控制器完成偏差量的校正并转换为输入PWM脉冲,发送给水平和俯仰电机驱动器㊂电机收到驱使,带动斯特林碟架完成转动,最终达到实时跟踪太阳光斑的效果㊂图9㊀图像处理算法运行结果图5㊀实验结果分析实验在铜川市某实验基地完成,数据观测时间为10月初到11月底,因实验数据量较大,文中只对11月21日太阳自动跟踪系统的系统误差进行分析,图10和图11分别为碟架高度角和方位角的实际跟踪误差曲线㊂图10㊀高度(俯仰角)实际跟踪误差曲线图11㊀方位(方位角)实际跟踪误差曲线通过对图10㊁图11的数据分析表明:该混合跟踪系统中,高度角实际跟踪误差不超过ʃ0.05ʎ,方位角实际跟踪误差不超过ʃ0.07ʎ,采用了混合跟踪方式的太阳自动跟踪系统,在精度和稳定性方面都得到了很大提高㊂但由于风力的影响和水平机械间隙较大等原因,现有的跟踪效果比系统真正的跟踪效果要差,如果排除掉这些外部因素,系统跟踪会有更好的效果㊂6㊀结论本系统将视日运行轨迹跟踪方法和光电跟踪方法相结合,以PLC和ARM处理器为核心构建控制回路,完成对太阳的实时跟踪㊂当太阳光斑可被检测时,利用ARM处理器根据采集的图像计算获取相关跟踪所需数据;无法检测到太阳光斑时,利用SPA算法得到太阳实际的方位角和高度角㊂再将数据发送给PLC,控制水平㊁垂直双轴转动机构调整斯特林碟架的角度,完成对太阳的跟踪动作㊂本文设计的混合跟踪方式系统相比现有跟踪技术具有如下优点:(1)系统既可以解决光电跟踪方式在多云天气无法进行自动跟踪的问题,又可以消除视日运动轨迹跟㊀㊀㊀㊀㊀68㊀InstrumentTechniqueandSensorJan 2021㊀踪方式带来的累计误差;(2)系统跟踪误差不大于ʃ0.1ʎ,使得碟架达到稳定跟踪效果的同时提高了太阳能的使用效率㊂实验过程中,因为碟架自身的安装和设计问题以及风力影响,使得实际效果与理论效果存在一定差异,未来进一步的研究中,主要以如何减少外界影响带来的误差为方向,方法是在风力较强的地方测试太阳跟踪器,来实现对跟踪装置的改进㊂参考文献:[1]㊀ERDINCO,UZUNOGLUM.Optimumdesignofhybridre⁃newableenergysystems:overviewofdifferentapproaches[J].RenewableandSustainableEnergyReviews,2012,16(3):1412-1425.[2]㊀SUMATHIV,JAVAPRAGASHR,BAKSHIA,etal.SolartrackingmethodstomaximizePVsystemoutput⁃areviewofthemethodsadoptedinrecentdecade[J].RenewableandSustainableEnergyReviews,2017,74:130-138.[3]㊀HUANGBJ,DINGWL,HUANGYC.Long⁃termfieldtestofsolarPVpowergenerationusingone⁃axis3-positionsuntracker[J].SolarEnergy,2011,85(9):1935-1944.[4]㊀ALEXANDRUC.Optimaldesignofthedual⁃axistrackingsystemusedforaPVstringplatform[J].JournalofRenewableandSustainableEnergy,2019,11(4):043501.[5]㊀SUNGURC.Multi⁃axessun⁃trackingsystemwithPLCcontrolforphotovoltaicpanelsinturkey[J].RenewableEnergy,2009,34(4):1119-1125.[6]㊀ARBABH,JAZIB,REZAGHOLIZADEHM.Acomputertrackingsystemofsolardishwithtwo⁃axisdegreefreedomsbasedonpictureprocessingofbarshadow[J].RenewableEnergy,2009,34(4):1114-1118.[7]㊀SONGXF,GUOW.InternationalConferenceonIntelligentSystemDesignandEngineeringApplication[C].Changsha:IEEE,2010:175-178.[8]㊀BENTAHERH,KAICHH,AVADIN,etal.AsimpletrackingsystemtomonitorsolarPVpanels[J].EnergyConversion&Management,2014,78(1):872-875.[9]㊀THARAMUTTAMJK,NGAK.Designanddevelopmentofanautomaticsolartracker[J].EnergyProcedia,2017,143:629-634.[10]㊀陈丽娟,周鑫.基于ARM嵌入式图像处理平台的太阳跟踪系统[J].现代电子技术,2012,35(4):71-74.[11]㊀NATARAJANSK,THAMPIV,SHAWR,etal.Experimentalanalysisofatwo⁃axistrackingsystemforsolarparabolicdishcollector[J].InternationalJournalofEnergyResearch,2019,43(2):1012-1018.[12]㊀CARBALLOJA,BONILLAJ,ROCAL,etal.Newlow⁃costsolartrackingsystembasedonopensourcehardwarefored⁃ucationalpurposes[J].SolarEnergy,2018,174:826-836.[13]㊀RIZVIAA,ADDOWEESHK,EL-LEATHYA,etal.Sunpositionalgorithmforsuntrackingapplications[C].Pro⁃ceedings,IECON2014-40thAnnualConferenceoftheIEEEIndustrialElectronicsSociety.Dallas:IEEE,2015:5595-5598.[14]㊀刘福才,赵佳伟,汤丽娜.基于嵌入式Linux系统的Qt/Embedded图像处理界面开发[J].计算机应用与软件,2009(11):116-117.[15]㊀张翠云,陈学永,陈仕国,等.基于PLC的双轴太阳能跟踪控制系统设计[J].福州大学学报(自然科学版),2013,41(6):1051-1055.[16]㊀ABDALLAHS,NIJMEHS.TwoaxessuntrackingsystemwithPLCcontrol[J].EnergyConversionandManagement,2004,45(11-12):1931-1939.[17]㊀YAOY,HUY,GAOS,etal.Amultipurposedual⁃axissolartrackerwithtwotrackingstrategies[J].RenewableEnergy,2014,72:88-98.[18]㊀TURCHETTAR,FANTA,GASIOREKP,etal.CMOSmon⁃olithicactivepixelsensors(MAPS):developmentsandfutureoutlook[J].NuclearInst.andMethodsinPhysicsRe⁃search,2007,582(3):866-870.[19]㊀SIDEKMHM,AZISN,HASANWZW,etal.Automatedpositioningdual⁃axissolartrackingsystemwithprecisionelevationandazimuthanglecontrol[J].Energy,2017,124:160-170.[20]㊀BLANCP,WALDL.TheSG2algorithmforafastandaccu⁃ratecomputationofthepositionofthesunformulti⁃decadaltimeperiod[J].SolarEnergy,2012,86(10):3072-3083.[21]㊀郭鹏,高明霞,孟汉堃,等.S7-1200在50MW光热发电项目中的应用[J].能源与节能,2018,152(5):48-51.[22]㊀PARIDAP,BHOIN.Transitionregionbasedsingleandmultipleobjectsegmentationofgrayscaleimages[J].Engi⁃neeringScienceandTechnology,anInternationalJournal,2016,19(3):1206-1215.[23]㊀AZEROUALA,AFDELK.FastimageedgedetectionbasedonfaberschauderwaveletandotsuThreshold[J].Heliyon,2017,3(12):5-6.[24]㊀KAURA,KUMARP,GUPTAGP.Aweightedcentroidlo⁃calizationalgorithmforrandomlydeployedwirelesssensornetworks[J].JournalofKingSaudUniversity⁃ComputerandInformationSciences,2017,31:82-91.[25]㊀刘淼生.基于图像处理的太阳跟踪控制系统研究与开发[D].武汉:华中科技大学,2011.作者简介:柯熙政(1962 ),教授,主要研究方向为无线激光通信理论与技术㊂E⁃mail:xzke@xaut.edu.cn王欢(1992 ),硕士研究生,主要研究方向为太阳自动跟踪系统㊂E⁃mail:396529389@qq.com。
210806448_双核心太阳方位跟踪系统设计
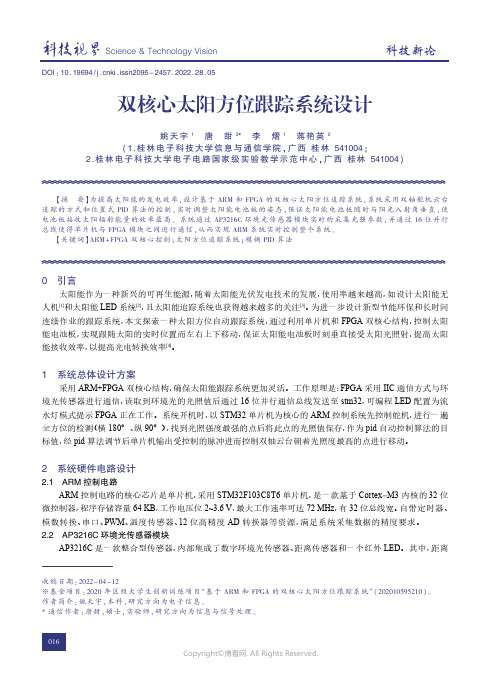
科技视界Science&Technology Vision科技新论DOI:10.19694/ki.issn2095-2457.2022.28.05双核心太阳方位跟踪系统设计姚天宇1唐甜2*李熠1蒋艳英2(1.桂林电子科技大学信息与通信学院,广西桂林541004;2.桂林电子科技大学电子电路国家级实验教学示范中心,广西桂林541004)【摘要】为提高太阳能的发电效率,设计基于ARM和FPGA的双核心太阳方位追踪系统,系统采用双轴舵机云台追踪的方式和位置式PID算法的控制,实时调整太阳能电池板的姿态,保证太阳能电池板随时与阳光入射角垂直,使电池板接收太阳辐射能量的效率最高。
系统通过AP3216C环境光传感器模块实时的采集光强参数,并通过16位并行总线使得单片机与FPGA模块之间进行通信,从而实现ARM系统实时控制整个系统。
【关键词】ARM+FPGA双核心控制;太阳方位追踪系统;模糊PID算法0引言太阳能作为一种新兴的可再生能源,随着太阳能光伏发电技术的发展,使用率越来越高,如设计太阳能无人机[1]和太阳能LED系统[2],且太阳能追踪系统也获得越来越多的关注[3]。
为进一步设计新型节能环保和长时间连续作业的跟踪系统,本文探索一种太阳方位自动跟踪系统,通过利用单片机和FPGA双核心结构,控制太阳能电池板,实现跟随太阳的实时位置而左右上下移动,保证太阳能电池板时刻垂直接受太阳光照射,提高太阳能接收效率,以提高光电转换效率[4]。
1系统总体设计方案采用ARM+FPGA双核心结构,确保太阳能跟踪系统更加灵活。
工作原理是:FPGA采用IIC通信方式与环境光传感器进行通信,读取到环境光的光照值后通过16位并行通信总线发送至stm32,可编程LED配置为流水灯模式提示FPGA正在工作。
系统开机时,以STM32单片机为核心的ARM控制系统先控制舵机,进行一遍全方位的检测(横180°、纵90°),找到光照强度最强的点后将此点的光照值保存,作为pid自动控制算法的目标值,经pid算法调节后单片机输出受控制的脉冲进而控制双轴云台朝着光照度最高的点进行移动。
双轴太阳能跟踪系统模型设计
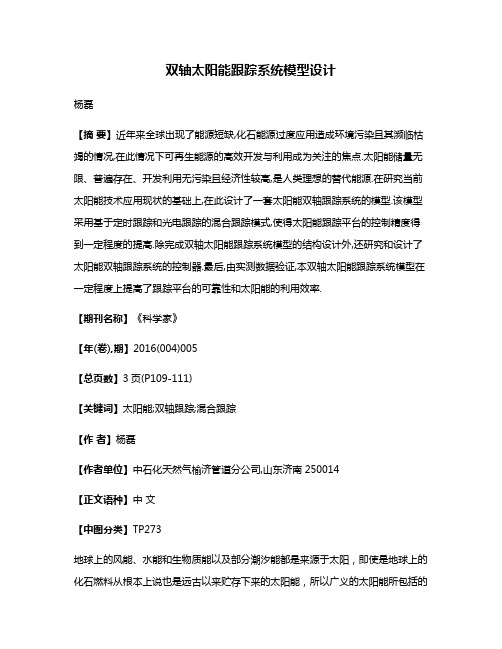
双轴太阳能跟踪系统模型设计杨磊【摘要】近年来全球出现了能源短缺,化石能源过度应用造成环境污染且其濒临枯竭的情况,在此情况下可再生能源的高效开发与利用成为关注的焦点.太阳能储量无限、普遍存在、开发利用无污染且经济性较高,是人类理想的替代能源.在研究当前太阳能技术应用现状的基础上,在此设计了一套太阳能双轴跟踪系统的模型.该模型采用基于定时跟踪和光电跟踪的混合跟踪模式,使得太阳能跟踪平台的控制精度得到一定程度的提高.除完成双轴太阳能跟踪系统模型的结构设计外,还研究和设计了太阳能双轴跟踪系统的控制器.最后,由实测数据验证,本双轴太阳能跟踪系统模型在一定程度上提高了跟踪平台的可靠性和太阳能的利用效率.【期刊名称】《科学家》【年(卷),期】2016(004)005【总页数】3页(P109-111)【关键词】太阳能;双轴跟踪;混合跟踪【作者】杨磊【作者单位】中石化天然气榆济管道分公司,山东济南250014【正文语种】中文【中图分类】TP273地球上的风能、水能和生物质能以及部分潮汐能都是来源于太阳,即使是地球上的化石燃料从根本上说也是远古以来贮存下来的太阳能,所以广义的太阳能所包括的范围非常大,狭义的太阳能则限于太阳辐射能的光热、光电和光化学的直接转换[1]。
太阳能既是一次能源,又是可再生能源,投射到地面上的太阳能一年中仍高达1.05×1018kW·h,也就是说太阳每秒钟照射到地球上的能量就相当于500万吨标准煤[2]。
太阳能的开发利用是解决能源短缺、环境恶化等问题的有效途径。
当前研究太阳能跟踪的控制技术对于太阳能的推广应用以及太阳能装置效率的提高具有重要意义。
实验证明,在相同条件下,采用自动跟踪发电设备要比固定发电设备的发电量提高35%[3]。
太阳能跟踪系统的跟踪精度和功耗问题是影响太阳能跟踪系统推广应用的主要因素,因此,本文着力在这2个方面进行研究。
本太阳能跟踪系统主要由机械结构、控制器硬件平台和执行机构3部分组成。
高精度双轴太阳能跟踪控制系统的设计

高精度双轴太阳能跟踪控制系统的设计张双华;文小玲;邵鹏程;陈立明【摘要】A solar tracking photoelectric sensor was designed and an optimization method of hybrid tracking control strategy was proposed for improving solar energy utilization in general photovoltaic power generation system. The system adopts a tracking mode combining time control with photoelectric control. The controller integrates and processes the real-time data of the sensor,converts the deviation angles of pitch and azimuth into some pulse width modulation,thereby drives the stepping motor to make the solar panel in a vertical position with the sun's rays. The experimental results showed that the designed photoelectric detection module could accurately track the position of the sun,and the optimized hybrid tracking control strategy not only reduced the system power consumption,but also improved the tracking accuracy. The entire system finally achieved the goal of maximum utilization of solar energy.%针对一般光伏发电系统中存在的太阳能利用率较低的问题,设计了一种太阳能跟踪光电传感器,并提出了一种混合跟踪控制策略的优化方法.系统采用时控和光控相结合的跟踪模式,通过控制器整合处理传感器的实时数据,将俯仰和方位两个维度的偏差角度转换成一定数量的PWM脉冲,从而驱动步进电机使太阳能电池板与太阳光线呈垂直姿态.实验测试结果表明:所设计的光电检测传感器模块可以准确地跟踪太阳方位,采用优化的混合跟踪控制策略不仅降低了系统功耗,而且提高了跟踪精度,整个系统最终实现了太阳能利用率最大化的目标.【期刊名称】《武汉工程大学学报》【年(卷),期】2018(040)003【总页数】5页(P315-319)【关键词】太阳能;时控跟踪;光控跟踪;光电传感器;单片机【作者】张双华;文小玲;邵鹏程;陈立明【作者单位】武汉工程大学电气信息学院,湖北武汉 430205;武汉工程大学电气信息学院,湖北武汉 430205;湖北省视频图像与高清投影工程技术研究中心,湖北武汉 430205;;武汉工程大学电气信息学院,湖北武汉 430205;武汉工程大学电气信息学院,湖北武汉 430205【正文语种】中文【中图分类】TM615随着化石能源的逐渐枯竭,环境问题日益严重,很多国家都致力于新能源的开发,而太阳能以其独特的优势成为现有的新型替代能源[1-3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ATmega8的双轴太阳跟踪器设计
太阳能作为一种清洁能源,倍受人们重视,因此提高太阳能的利用率已
成为研究热点。
理论分析表明:精确跟踪与非跟踪太阳,其能量的接收效率相
差37.7%。
因此精确跟踪太阳,对其利用率的提高是很显著的。
跟踪太阳的方式主要有光电跟踪和视日运动轨迹跟踪。
前者是闭环的随机系统,跟踪灵敏
度高,结构设计较为方便,易于实现,但受天气影响大,如果长时间乌云遮住
太阳,太阳光线往往不能照到感光元件,导致跟踪装置无法对准太阳,甚至会
出现误动作;后者是开环的程控系统。
在任何天气下都可正常工作,但在跟踪
过程中不能消除累积误差。
该太阳跟踪器设计采用一种互补跟踪控制方式,在
晴天时,选择跟踪灵敏度高的光电跟踪方式,而在天气状况不太好时。
则切换
到视日运动轨迹跟踪。
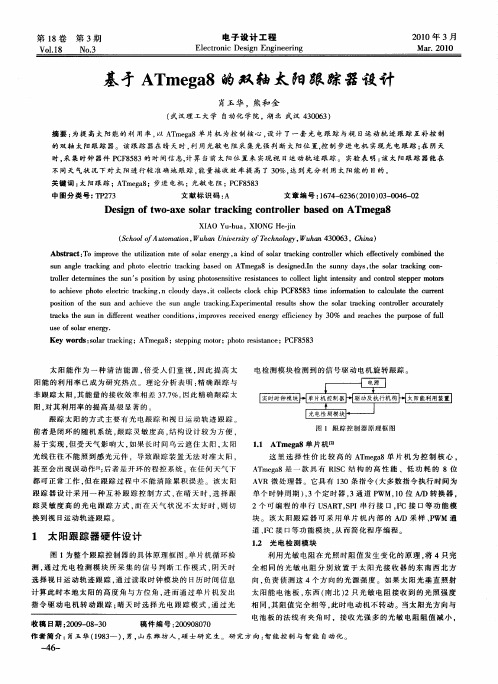
1 太阳跟踪器硬件设计图1 为整个跟踪控制器的具体原理框图。
单片机循环检测,通过光电检测模块所采集的信号判断工作模式。
阴天时选择视日运动轨迹跟踪,通过读取时钟模块的日历时间信息计算此时本
地太阳的高度角与方位角,进而通过单片机发出指令驱动电机转动跟踪;晴天
时选择光电跟踪模式,通过光电检测模块检测到的信号驱动电机旋转跟踪。
1.1 ATmega8 单片机这里选择性价比较高的ATmega8 单片机为控制核心,ATmega8 是一款具有RISC 结构的高性能、低功耗的8 位AVR 微处理器。
它
具有130 条指令(大多数指令执行时间为单个时钟周期),3 个定时器,3 通道PWM,10 位A/D 转换器,2 个可编程的串行USART,SPI 串行接口,I2C 接口等功能模块。
该太阳跟踪器可采用单片机内部的A/D 采样、PWM 通道、
I2C 接口等功能模块,从而简化程序编程。
1.2 光电检测模块利用光敏电阻在光照时阻值发生变化的原理,将4 只完全相同的光敏电阻分别放置于太阳光
接收器的东南西北方向,负责侦测这4 个方向的光源强度。
如果太阳光垂直照。