ABB产品REL511HMI菜单
RET521 v2.3操作手册
ABB机器人基本操作说明
ABB基本操作说明
ABB基本操作说明
本文档旨在提供详细的ABB的基本操作指南。
它将介绍如何正确使用和操作ABB,以确保其安全性和高效性。
章节一:介绍
1.1 概述
1.2 组成部分
1.3 工作原理
章节二:安全操作
2.1 安全措施概述
2.2 的安全区域划定
2.3 紧急停止按钮的使用
2.4 保持安全距离
2.5 维修和保养的安全措施
章节三:基本操作步骤
3.1 的开启和关闭
3.2 的启动和停止
3.3 的程序选择和切换
3.4 的运动控制
3.5 的编程和调试
3.6 的故障排除
3.7 的紧急停止和应急处理
章节四:附加功能和工具
4.1 的视觉系统
4.2 的力传感器
4.3 的外部设备连接和控制
4.4 的远程操作和监控
章节五:常见问题解答
5.1 无法启动的常见原因及解决方法5.2 运动异常的常见原因及解决方法5.3 编程错误的常见原因及解决方法附件:
本文档附带以下内容,供进一步参考:●ABB操作手册
●ABB维修手册
●ABB安全指南
法律名词及注释:
1.:根据《产品安全技术要求》(GB/T 34889-2017)定义,是一种根据预定程序自动执行工作的多功能装置。
2.安全距离:根据《产品安全技术要求》(GB/T 34889-2017)定义,安全距离是指人与运动部分之间至少需要保持的距离,以确保工作过程中的人员的安全。
ABB机器人的手动操作

ABB的手动操作本文档提供了ABB的手动操作的详细步骤和指导。
以下章节将逐步介绍手动操作的各个方面。
1.准备工作1.1 确保电源已连接并打开。
1.2 在控制台或者操控设备上打开ABB的操作界面。
2.手动操作模式的选择2.1 在ABB的操作界面上,选择手动操作模式。
2.2 确保处于安全状态,且没有正在执行的自动化任务。
3.姿势控制3.1 使用手柄或者其他操控设备控制的各个关节,实现姿势的调整。
3.2 通过手动控制的运动,确保的位置符合预期。
4.末端执行器控制4.1 使用操控设备或者控制面板上的按钮,控制末端执行器的开启和关闭。
4.2 确保末端执行器的控制操作正确无误。
5.应急停止和重置5.1 在紧急情况下,按下操作面板上的应急停止按钮,立即停止的运动。
5.2 在处理完紧急情况后,按下上的重置按钮或者重新启动系统,恢复的工作状态。
6.安全注意事项6.1 在操作时,确保操作人员戴好安全手套和其他个人防护装备。
6.2 避免将人体部位置于运动范围内,以防止意外伤害。
6.3 严禁在运行时对其进行维护或者更改。
附件:1.ABB用户手册:提供了ABB的详细操作说明和相关安全指导。
2.ABB安全手册:介绍了的安全操作规程和标准。
法律名词及注释:1.:依据《安全》国家标准GB/T12668-2011的定义,是自动执行给定任务的可重编程的多功能机械设备。
2.手动操作:依据《安全》国家标准GB/T12668-2011的定义,手动操作指通过操作设备或者控制面板手动控制运动或开关操作。
触摸屏HMI操作说明书
昆明烟厂太阳能预热洗涤热水系统操作员站HMI操作简易说明书(2011-8)操作员站 (1)HMI操作简易说明书 (1)HMI系统概述 (3)软件系统架构 (3)窗口操作介绍 (3)登录窗口 (3)功能操作栏 (3)常规主画面 (4)用户注销 (4)确认退出对话框 (5)报警浏览窗口 (5)报警历史程序窗口 (6)模拟量趋势 (7)操作记录查询画面 (8)标准模块窗口 (8)工程参数设定画面 (8)电机操作画面 (10)HMI系统概述软件系统架构昆明烟厂太阳能预热洗涤热水系统采用1个Pannelview触摸屏做操作员站和工程师站,HMI系统采用FTView上位机软件,通过RS232链接Controllogix,采用RSLinx Enterprise OPC连接方式获取PLC中的数据。
窗口操作介绍登录窗口图2 登录窗口当操作员站触摸屏启动后,会自动加载HMI程序,程序启动后,会提示输入操作员用户名和密码,只有有权限登录的人员才能登录本系统。
功能操作栏图3 功能操作栏所有主画面的底部均为此操作栏,用于一些功能画面的导航。
点击左边4个按钮将弹出菜单窗口栏,用于直接导航切换到相应到画面。
点击历史趋势将切换到历史趋势窗口,点击状态图将切换到当前工艺主画面。
点击操作参数按钮,将显示可以操作的水泵、电磁阀启停、开闭。
点击工程参数按钮将切换到工程参数设定画面。
常规主画面图4 常规主画面本画面为系统中较常规的画面,集中了绝大部分画面元素。
大部分画面元素是根据PID 画面所制,每个监控点都有一个KKS编码与之对应,点击画面上的不同监控点,会弹出相应的操作小窗口用于操作。
如果本画面中有相应的顺控子组操作,则会放置相应的顺控操作按钮。
用户注销图5 确认注销对话框当点击任意一个主画面上的用户注销按钮时,将注销当前登录用户,为只能查看状态,不能做任何操作的权限画面。
当用户重新登录,才能根据分配的用户权限操作或设定工程参数。
权限分配是按照操作员组来划分的,系统中预留5个组,分别是管理员组,操作员组1,操作员组2,操作员组3,默认组,所有的用户分属于不同的组。
ABB菜单中英文对照

(4) IO (人机接口)
○1 Slot13-PSM 2 (Slot 槽号-模块 代号)
FunOctputs (功能输出)
○2 Slot15-PSM3 ()
FunOctputs (功能输出)
○3 Slot17-PSM4 ()
FunOctputs (功能输出)
○26 MI31-Error ○20 (模块 3 故障)
○27 MI41-Error ○21 (模块 4 故障)
○28 MI51-Error ○22 (模块 5 故障)
○29 MI61-Error ○23 (模块 6 故障)
○30 AND1A ○24 (与门的第 1 部分)
○31 AND1B ○25 (与门的第 2 部分)
FUSE-VTSZ (PT 断线信号)
FUSE-VTSZ () CTSV-FAIL () CB1-CLOSE-A () CB1-CLOSE-B () CB1-CLOSE-C ()
X10 Data ()
□1 Pre Fault (故障前值)
U1=0.000kV (1-A 相电压,2-B,3-C,4-线路,5-零序,电流相同) 0.000deg (相角) [ U2、U3、U4、U5、I1、I2、I3、I4、I5、Frequency(有效频率)] [ 往右移即分别显示这列值及各值的角度]
□2 Fault (故障期间值)
显示内容同上,只是无频率值显示
(1) ServiceValues (有效值)
U=0.000kV () [ I (电流 A)、P(有功 MW)、Q(无功 Mvar)、S(视在功率 MVA)、f(频率 Hz)、I NegSeg (负序电流 A) ] [ 往右移即分别显示这列值及各值的角度 ]
AB HMI操作说明
收缩/展开列 表
滚动条 手动操作
2014-8-19
Prev
More Next
Next
19
SVP-BODY
滚动条界面
绿色指示表 示此动作可 以进行
展开列表
2014-8-19
Prev
More Next
Next
20
SVP-BODY
滚动条界面
• 功能列表提供辅助功能.
功能列表与指 示
2014-8-19
Prev
Next
3
SVP-BODY
界面导航
• 典型界面
– – – – – – – – – – Select 选择 Help帮助 Mode模式 Alarm报警 Scrollist滚动条 DeviceNet Robot机器人 Cell overview Cell概况 Station overview工位概况 Maintenance 维护
选择界面操作
• 区别不同工位选择时上面界面的不同
当前选中 30#工位 界面选择按 钮根据30#工 位性质自动 进行了更新
2014-8-19
Prev
More Next
Next
12
SVP-BODY
模式界面
• 模式界面提供选择试制模式, 使能或取消使能所有设备, 指示灯测试等功能.
机器人状态
2014-8-19
Cell 概况界面
• Cell 概况界面展示区域状态并允许跳转至工装状态界面或机器人界面
添加按钮,单 击则跳转至相 应界面
位图
2014-8-19
Prev
More Next
Next
30
SVP-BODY
Cell 概况界面
2024年ABB机器人说明书中文培训专用(增加多场景)

ABB机器人说明书中文培训专用(增加多场景)ABB说明书中文培训专用1.引言本文档旨在为ABB培训提供详细的操作说明。
ABB是一种先进的自动化设备,广泛应用于工业生产、物流、医疗等领域。
为了确保用户能够正确、安全地操作ABB,我们特此编写了本说明书,以帮助用户全面了解ABB的功能、操作流程和维护保养等方面的知识。
2.ABB概述ABB是一种具有高度灵活性和精确度的工业,采用先进的控制系统和驱动技术,能够完成各种复杂的作业任务。
其主要特点如下:2.1高度灵活:ABB具有6个自由度,能够实现各种复杂轨迹的运动,适应各种作业环境。
2.2高精度:ABB采用先进的控制系统和驱动技术,确保了作业的精确度。
2.3高可靠性:ABB采用高品质的零部件,经过严格的测试和验证,保证了的可靠性和稳定性。
2.4易于编程:ABB配备有用户友好的编程界面,便于用户进行编程和调试。
3.ABB操作流程3.1开机准备3.1.1检查周围环境,确保无障碍物。
3.1.2检查电源线、信号线等连接是否正常。
3.1.3打开控制柜,检查内部电路和气路连接是否正常。
3.1.4按照说明书要求,为接通电源和气源。
3.2开机操作3.2.1打开控制柜,按下电源按钮,启动控制系统。
3.2.2在控制柜上选择相应的程序,进行参数设置。
3.2.3按下启动按钮,开始运行。
3.3作业操作3.3.1根据作业要求,编写或选择合适的程序。
3.3.2在控制柜上设置程序参数,如速度、加速度等。
3.3.3按下启动按钮,开始执行作业任务。
3.4停机操作3.4.1完成作业任务后,按下停止按钮,停止运行。
3.4.2关闭控制柜,切断电源和气源。
4.ABB维护保养4.1检查各部件连接是否牢固,如有松动,及时紧固。
4.2检查润滑系统,确保润滑充足。
4.3检查电路和气路连接,如有损坏,及时更换。
4.4检查控制系统,确保程序正常运行。
4.5定期对进行清洁,保持设备整洁。
5.安全注意事项5.1操作时,请确保周围无人员靠近。
ABB机器人基本操作说明ppt课件

点击这里就可以添加 指令
为深入学习习近平新时代中国特色社 会主义 思想和 党的十 九大精 神,贯彻 全国教 育大会 精神,充 分发挥 中小学 图书室 育人功 能
第10步
指令具体用法, 请看后面
这里我添加了 一个指令进来
了
为深入学习习近平新时代中国特色社 会主义 思想和 党的十 九大精 神,贯彻 全国教 育大会 精神,充 分发挥 中小学 图书室 育人功 能
为深入学习习近平新时代中国特色社 会主义 思想和 党的十 九大精 神,贯彻 全国教 育大会 精神,充 分发挥 中小学 图书室 育人功 能
13
为深入学习习近平新时代中国特色社 会主义 思想和 党的十 九大精 神,贯彻 全国教 育大会 精神,充 分发挥 中小学 图书室 育人功 能
谢谢!
点击这 里
这样你就可以定义 自己想要的按键功
能了
为深入学习习近平新时代中国特色社 会主义 思想和 党的十 九大精 神,贯彻 全国教 育大会 精神,充 分发挥 中小学 图书室 育人功 能
机器人与外部轴的转化
线性移动与重定位移 动转化
机器人6轴转化
增量按键(可试机器人 移动速度变慢)
为深入学习习近平新时代中国特色社 会主义 思想和 党的十 九大精 神,贯彻 全国教 育大会 精神,充 分发挥 中小学 图书室 育人功 能
第5步
接下来,可看 到模块里面没 有程序,所以 要在这里创建
程序
为深入学习习近平新时代中国特色社 会主义 思想和 党的十 九大精 神,贯彻 全国教 育大会 精神,充 分发挥 中小学 图书室 育人功 能
第6步
点击进例行程序后,发现里 面没例行程序,所以我们要 点这里创建一个例行程序
为深入学习习近平新时代中国特色社 会主义 思想和 党的十 九大精 神,贯彻 全国教 育大会 精神,充 分发挥 中小学 图书室 育人功 能
abb面板操作手册

abb面板操作手册ABB面板操作手册一、安全注意事项1. 在操作ABB面板时,避免潮湿和高温环境。
2. 在操作ABB面板时,不要使用尖锐物体刮擦显示屏表面。
3. 在操作ABB面板时,不要将水或其他液体溅到机身或显示屏上,以免造成电器故障或危险。
4. 在操作ABB面板时,不要接触内部电气元件,以免造成触电或其他危险。
5. 在操作ABB面板时,不要使用过量的力量按压按键或旋钮,以免损坏面板。
二、面板概览ABB面板主要由以下几部分组成:1. 显示屏2. 操作键、旋钮和开关3. 端口和接口三、面板操作指南1. 开机和关机开机:按下面板上的开机键,等待显示屏出现欢迎画面即可使用。
关机:按下面板上的关机键,等待显示屏关闭即可。
2. 菜单操作按下面板上的菜单键,显示屏上将出现菜单列表。
通过操作键或旋钮,选择所需的菜单项并按下“确认”键进行设置或修改。
3. 编辑操作在面板上选择需要编辑的信息或值,通过操作键或旋钮进行修改。
修改完成后,请按下“保存”键,使修改的内容生效。
4. 备份和恢复为了避免意外数据丢失,建议您定期进行备份。
按下面板上的备份键并按照提示进行操作即可完成备份。
如需恢复备份数据,按下面板上的恢复键并按照提示进行操作即可。
5. 系统重置如遇到系统异常,请按下面板上的重置键进行系统重置。
重置后,请重新进行参数设置。
四、故障排除1. 电源无法开启请检查面板是否连接电源,是否插头插入牢固。
2. 显示屏没有正常显示请检查面板连接是否正常,尝试重新开机。
3. 操作键或旋钮失灵请检查是否因为灰尘或污垢影响触点接触。
如无法自行清理,请联系售后服务人员进行维修。
4. 系统出现异常请尝试按下面板上的重置键。
如无法解决,请联系售后服务人员进行维修。
ABB机器人简单操作指南

ABB机器人简单操作指南1.了解机器人的基本结构和组成部件ABB机器人主要由机械臂、控制柜和操作面板组成。
机械臂由多个关节组成,每个关节都由伺服电机驱动,带有编码器进行位置控制。
控制柜是机器人的主要电子控制单元,包含电源、电机驱动器、控制卡和各种传感器。
操作面板用于对机器人进行各种操作和设置。
2.连接机器人和控制柜将机器人和控制柜连接在一起。
确保所有的连接器正确连接,并检查电源是否正常连接。
确保机器人和控制柜间的通信正常。
3.打开控制柜电源打开控制柜电源并等待机器人完成初始化。
在初始化过程中,机器人会进行自检和各种安全检查。
确保在机器人完成初始化之前不要进行任何操作。
4.设置机器人的工作区域使用操作面板进入机器人的设置菜单,设置机器人的工作区域。
可以设置工作区域的大小、位置和限制等。
5.创建机器人程序使用ABB机器人编程软件创建机器人程序。
机器人程序由一系列的指令组成,用于控制机器人的运动和操作。
可以使用编程语言或者图形化编程界面来创建机器人程序。
6.上传机器人程序将机器人程序上传到机器人控制柜中。
使用操作面板或者软件界面进行程序上传,并等待上传完成。
7.设置机器人的运动参数在机器人程序中设置机器人的运动参数,如速度、加速度和遵从度等。
这些参数会影响机器人的运动效果和安全性。
8.执行机器人程序使用操作面板或者远程控制软件执行机器人程序。
确保在执行程序之前,机器人周围没有任何障碍物,并确保机器人能够自由移动。
9.监控机器人的运行状态在执行机器人程序时,通过操作面板或者远程控制软件监控机器人的运行状态。
可以查看机器人的姿态、速度和位置等信息。
10.进行机器人的维护和保养定期进行机器人的维护和保养工作,如清洁机械臂、检查电源和连接器等。
确保机器人的各个部件处于良好的工作状态。
总结:以上是ABB机器人的简单操作指南。
了解机器人的基本结构和组成部件,连接机器人和控制柜,打开控制柜电源并等待机器人完成初始化,设置机器人的工作区域,创建和上传机器人程序。
ABB智能照明触摸屏操作手册

(2)以三联面板为例,第一联低等照度,第二联中等照度,第三联全开/全关。(左关/右开)
2.
(1)将开关面板上方的防误操作开关按下,当LID指示灯点亮后方可对面板进行操作。
(2)以五联面板为例,第一联低等照度,第二联中等照度,第三联开启一半,第四联开启前段部分。第五联全开/全关。(左关/右开)
(12)
只有当程序修改时运用此功能。
3. 触摸屏操作
显示屏的表面在触摸时会产生动作,出现触摸屏主菜单(如图2-4)。
当您操作本控制系统时,请使用提供的触摸笔或手指,并触摸显示屏上的按钮。
图2-4
(1)
在触摸屏主菜单中点击车间整体控制,输入密码1111后点击OK进入车间整体控制菜单(如图2-5)。
图2-5
可以试听所选的声音
确认按“OK”
(8)
从列表中选择定时/报警声音
可以试听所选的声音
确认按“OK”
(9)
可以打开或关闭输入错误提示声音
确认按“OK”
(1
可以打开或关闭键盘声音
确认按“OK”
(11)
不需要经常进行触摸校准,如果常出现触摸错误,请使用触摸笔或手指校准触摸显示。
校准时,用笔正确点击屏幕上出现的目标。
激活为自动开、关功能开启,停用为自动开、关功能关闭。
如图2-12设置为每天01:00时,车间内全部灯光自动关闭。
2024年度-ABB机器人操作手册(中文版)3

机器人将在更多领域得到应用,如医疗、教 育、服务等。随着机器人技术的不断进步和 应用场景的不断拓展,机器人将为人类生 活中不可或缺的一部分。
随着5G、物联网等新技术的普及和 应用,机器人将实现更高效的远程 控制和数据传输,进一步提高机器 人的工作效率和应用范围。
46
THANKS
47
能。
28
运动控制算法优化
力控制
1
2
实现机器人末端执行器的力控制,以适应不同应 用场景。
3
采用力/位混合控制策略,提高机器人操作的灵活 性和准确性。
29
典型应用案例分析
案例一
自动化装配线
描述
机器人在装配线上完成零件的抓取、搬运和装配等任 务。
关键技术
视觉识别、路径规划、力控制等。
30
典型应用案例分析
案例二
焊接应用
描述
机器人执行焊接任务,包括焊缝跟踪、焊接参数调整等。
关键技术
焊缝识别、焊接过程监控、自适应控制等。
31
典型应用案例分析
案例三
协作机器人应用
描述
人与机器人协同工作,共同完成复杂任务。
关键技术
人机交互、安全控制、任务分配与协同等。
32
04
机器人维护与保养知识
33
日常维护注意事项
保持机器人本体清洁,避免 灰尘和杂物堆积影响机器人
自定义快捷键,提高操作 效率。
示教器高级功能
01
03 02
13
编程语言与指令介绍
01
编程语言
02 ABB机器人使用RAPID编程语言,基于Pascal语 言开发。
03 RAPID语言具有结构化编程、模块化设计等特点, 易于学习和使用。
2024版ABB机器人操作手册中文版8

ABB机器人操作手册中文版8CONTENTS •机器人系统概述•机器人安装与调试•机器人编程与操作•机器人维护与保养•机器人安全规范与注意事项•机器人应用案例与拓展机器人系统概述01ABB机器人简介ABB集团是全球电气产品、机器人和自动化系统的领先供应商,致力于帮助客户提高生产效率、提升能源效率、保障生产安全。
ABB机器人是ABB集团的核心产品之一,拥有高速、高精度、高可靠性等显著优点,被广泛应用于各个领域。
ABB机器人采用先进的控制技术和运动规划算法,能够实现复杂的操作和运动轨迹,提高生产效率和产品质量。
机器人系统组成机器人本体包括机械臂、手腕、末端执行器等部分,是实现各种动作和操作的核心部件。
控制系统包括控制器、示教器、传感器等部分,用于对机器人进行精确控制、监控和调试。
外部设备包括工装夹具、变位机、输送线等辅助设备,用于配合机器人完成各种生产任务。
装配领域ABB 机器人能够完成各种复杂的装配任务,提高装配精度和效率。
焊接领域ABB 机器人在焊接领域具有广泛的应用,能够实现高质量的焊接效果和高效的焊接速度。
打磨领域ABB 机器人能够实现高精度的打磨和抛光,提高产品表面质量和美观度。
其他领域ABB 机器人还被广泛应用于搬运、码垛、上下料、包装等领域,为各行业的自动化生产提供了有力支持。
喷涂领域ABB 机器人能够实现均匀的喷涂效果和高效的喷涂速度,提高产品质量和生产效率。
机器人应用领域机器人安装与调试02机器人安装前准备确定安装位置选择平整、无振动、无电磁干扰的场地,确保机器人稳定工作。
检查设备清单核对机器人本体、控制器、示教器等设备是否齐全,型号是否匹配。
准备安装工具准备好所需的安装工具,如螺丝刀、扳手、水平尺等。
安全防护措施在安装前,需穿戴好安全防护用品,并确保安装现场符合安全规范。
机器人安装步骤安装机器人本体按照安装图纸将机器人本体安装在预定位置上,并进行水平调整。
连接电缆将机器人本体与控制器、示教器等设备之间的电缆连接好,确保连接正确、牢固。
HMI操作面板使用说明
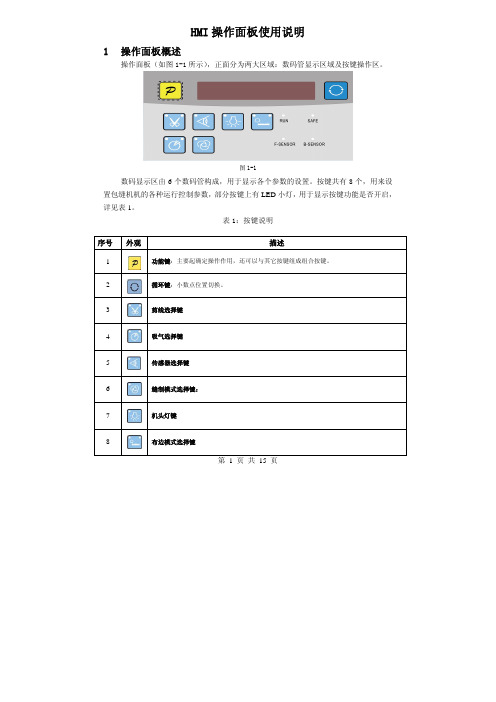
第 1 页 共 15 页HMI 操作面板使用说明1 操作面板概述操作面板(如图1-1所示),正面分为两大区域:数码管显示区域及按键操作区。
图1-1数码显示区由6个数码管构成,用于显示各个参数的设置。
按键共有8个,用来设置包缝机机的各种运行控制参数,部分按键上有LED 小灯,用于显示按键功能是否开启,详见表1。
表1:按键说明序号 外观描述1功能键:主要起确定操作作用,还可以与其它按键组成组合按键。
2 循环键:小数点位置切换。
3剪线选择键4吸气选择键5传感器选择键6缝制模式选择键:7机头灯键8布边模式选择键2用户模式定义2.1操作员模式此模式为操作面板的默认模式,操作面板上电后自动进入此模式。
进入此模式,6个数码管上的小数点位会两个相连的数码管小数点移动显示(屏幕显示),表示HMI处于空闲状态。
在执行任何操作的时候,如果长时间不按按键的话,HMI会自动切换到空闲状态,前一执行的操作将不会被执行!2.1.1全自动/半自动/全手工模式设置:全自动模式:按5键,再按下6键,两个无先后顺序。
5键灯亮,6键灯亮。
半自动模式:5键灯亮,6键灯灭。
全手工模式:5键灯灭,6键灯灭。
2.1.2剪线模式设置:。
当3按键上面两个LED灯都不点亮的时候,表示没有剪线;当3按键左上方LED灯点亮,右上方不亮的时候,表示前剪线;当3按键左上方LED灯不亮,右上方点亮的时候,表示后剪线;当3按键左上方、右上方LED灯都点亮的时候,表示前后均剪线。
2.1.3吸气模式设置:。
当4按键上面两个LED灯都不点亮的时候,表示没有吸气;当4按键左上方LED灯点亮,右上方不亮的时候,表示前吸气;当4按键左上方LED灯不亮,右上方点亮的时候,表示后吸气;第 2 页共 15 页当4按键左上方、右上方LED灯都点亮的时候,表示前后均吸气。
2.1.4机头灯设置:当按下7后,键角LED灯会亮,机头灯点亮。
再按一下键左上角LED灯会熄灭,机头灯灭。
2.1.5布边模式设置:当8按键上面两个LED灯都不点亮的时候,表示没有拖布;当8按键左上方LED灯点亮,右上方不亮的时候,表示前拖布;当8按键左上方LED灯不亮,右上方点亮的时候,表示后拖布;当8按键左上方、右上方LED灯都点亮的时候,表示前后均拖布。
ABB产品REL511HMI菜单

ABB产品REL511HMI菜单REL511保护人机对话操作菜单中英文对照DisturbReport扰动报告Disturbances扰动报告Disturbance1第一个扰动报告--Disturbance10第十个扰动报告ManualTrig手动触发ClearDistRep清除扰动报告ServiceReport服务报告ServiceValues服务报告值U, I, P, Q, S, f, InegSeqPhasors采样值Primary一次采样值Secondary二次采样值Functions功能Impedance阻抗保护General一般测量值值ImpValues阻抗测量值ImpDriction阻抗方向元件测量值HighSpeedBO快速距离保护二进制输出FunOutPutsHSBO-ERROR TRL1 TRL2 TRL3 CSL1 CSL2 CSL3 CSMPH 输出模块故障跳A相跳B相跳C相A相发信B相发信C相发信三相发信Zone1阻抗一段FunOutPuts功能输出ZM1-TRIP, ZM1-TRL1, ZM1-TRL2, ZM1-TRL3,阻抗一段出口,阻抗一段A、B、C相出口ZM1-START, ZM1-STL1, ZM1-STL2, ZM1-STL3,阻抗一段起动,阻抗一段A、B、C相起动ZM1-STND阻抗一段无方向起动Zone2阻抗二段FunOutPuts功能输出ZM2-TRIP, ZM2-TRL1, ZM2-TRL2, ZM2-TRL3,阻抗二段出口,阻抗二段A、B、C相出口阻抗二段起动,阻抗二段A、B、C相起动ZM2-STND阻抗二段无方向起动Zone3阻抗三段FunOutPuts功能输出ZM3-TRIP, ZM3-TRL1, ZM3-TRL2, ZM3-TRL3, 阻抗三段出口,阻抗三段A、B、C相出口ZM3-START, ZM3-STL1, ZM3-STL2, ZM3-STL3, 阻抗三段起动,阻抗三段A、B、C相起动ZM3-STND阻抗三段无方向起动Zone4阻抗四段FunOutPuts功能输出ZM4-TRIP, ZM4-TRL1, ZM4-TRL2, ZM4-TRL3, 阻抗四段出口,阻抗四段A、B、C相出口ZM4-START, ZM4-STL1, ZM4-STL2, ZM4-STL3, 阻抗四段起动,阻抗四段A、B、C相起动ZM4-STND阻抗四段无方向起动Zone5阻抗五段FunOutPuts功能输出ZM5-TRIP, ZM5-TRL1, ZM5-TRL2, ZM5-TRL3, 阻抗五段出口,阻抗五段A、B、C相出口阻抗五段起动,阻抗五段A、B、C相起动ZM5-STND阻抗五段无方向起动PowerSwingDet振荡闭锁FunOutPuts功能输出PSD-START振荡闭锁起动SwitchOnToFlt阻抗合于故障后加速FunOutPuts功能输出SOTF-TRIP合于故障出口TimeDelayOC定时限过流TOC-TRIP, TOC-TRP, TOC-TRN, TOC-STP, TOC-STL1,过流三段出口,相过流出口,零序过流出口,相过流起动,A相过流起动,TOC-STL2, TOC-STL3, TOC-STNB相过流起动,C相过流起动,零序过流起动BreakerFailure断路器失灵DeadLineDet无压无流检测FunOutPuts功能输出DLD-START, DLD-STIL1, DLD-STL2, DLD-STL3,无压无流检测起动,A相无流检测,B相无流检测,C相无流检测,DLD-STUL1, DLD-STUL2, DLD-STL3, DLD-STPHA相无压检测,B相无压检测,C相无压检测,FuseFailurePT断线监视FunOutPuts功能输出FUSE-VTSU, FUSE-VTSZ, FUSE-VTF3PHPT断线电压监视,PT断线阻抗监视,PT断线三相电压监视,Settings定值组DisturbReport扰动报告Operation扰动报告投退控制字SequenceNo故障次序SamplingRate采样率RecordingTimes记录时间BinarySignals二进制输入信号Functions功能Group1定值组一Impendance阻抗保护General最小精工电流Direction阻抗方向Zone1阻抗一段Zone2Zone3Zone4Zone5PowerSwingDet振荡闭锁SwitchOnToFlt合于故障后加速TimeDelayOC定时限过流Operation定时限过流控制字Ip> TP IN> tN相过流相过流时间零序过流零序过流时间BreakerFailure失灵保护DeadLineDet无压无流检测FuseFailurePT断线ZeroSeq 3U0 I DV DI零序投退零序最小动作电流电压突变量电流突变量Group2 Group3Group4TerminalReport装置报告SelfSuperv自检IdentityNo装置鉴别号Modules模块AnglogInputs 模拟量输入Configruration 装置配置AnalogInputs 模拟量输入IO-Modules输入输出模块TerminalCom 装置通讯SPAComSPA通讯规约Rear Front后台通讯前台通讯LONComLON通讯规约Time时钟同步LocalHMI就地人机对话Identities装置身份鉴别Test测试TestMode测试模式ConfiguMode 配置模式。
ABB 机器人客户端设置说明书

ManualConnecting ArtiMinds RPS to an ABB RobotClient Setup InstructionsVersion 1.1Date: 21 Jan 2022ContactSupport: *********************Sales: *******************ArtiMinds Robotics GmbHAlbert-Nestler-Str. 11D-76131 KarlsruheManaging Directors: Dr.-Ing. Sven R. Schmidt-Rohr, Dr.-Ing. Rainer JäkelRegistration Court: Amtsgericht MannheimCommercial Register Number: HRB 717563VAT Number under § 27a UStG: DE290656974ContentContent (2)1Setup (3)1.1Robot (3)1.1.1Supported Controllers (3)1.1.2Required software packages (3)1.2ArtiMinds RPS (3)1.2.1Setup in ArtiMinds RPS (3)1.2.2One-Click Installation of the required components and controller settings . 4 1.2.3Update an existing ArtiMinds Installation on the ABB IRC5 controller (5)1.2.4Downgrading an existing ArtiMinds Installation on the ABB IRC5 controller5 1.2.5Uninstalling an ArtiMinds RPS Installation from the ABB IRC5 controller .. 5 2Operation (6)2.1General Communication (6)2.2Moving the robot (6)2.2.1Manual Mode (6)2.2.2Auto Mode (6)3Trouble-shooting (7)4Vision (8)5Force (9)6Error reporting (10)Notes (11)Changelog (12)1 Setup1.1 Robot1.1.1 Supported ControllersABB IRC5 Controller1.1.2 Required software packagesArtiMinds RPS requires the following software options to be installed on the IRC5 controller:∙616-1 PC Interface∙623-1 Multitasking∙661-2 Force Control Base (for +Force functionality only)The options can be isntalled using RobotStudio. To optain additional Software Options, please contact your ABB Sales representative.Minimum User GrantsArtiMinds RPS will need the user credentials of a user on the IRC5 controller, which has at least the following grants:1. Load program (UAS_RAPID_LOADPROGRAM)2. Modify current value (UAS_RAPID_CURRVALUE)3. Execute program (UAS_RAPID_EXECUTE)4. Program debug (UAS_RAPID_DEBUG)5. I/O write access (UAS_IO_WRITE)6. Modify configuration (UAS_CFG_WRITE)7. Remote warmstart (UAS_REMOTE_WARMSTART)Checking and adjusting User Grants for a specific user can be done using RobotStudio.1.2 ArtiMinds RPSIn order for ArtiMinds RPS functionality to fully work on the ABB IRC5 controller, several modules and configuration entries need to be installed on the controller.It is assumed that the required ABB software packages have been installed successfully on the IRC5 controller and a user with the correct user grants exists (See chapter 1.1.2 Required software packages).The setup of ArtiMinds RPS and the ABB IRC5 controller is devided into two parts: First, certain settings have to be defined in ArtiMinds RPS. Then, all required components and controller settings will be installed on the controller automatically using the One-Click Installation button. After this, the controller will be restarted automatically and is then ready to be used with ArtiMinds RPS.1.2.1 Setup in ArtiMinds RPSThe following settings have to be defined either in the ArtiMinds RPS Robot Configurator during robot setup, or in the ArtiMinds RPS settings page:1. IP Address – the address of your IRC5 controller in the network connected to your PC.2. User – The name of a local user on the IRC5 controller, which can be used by ArtiMinds RPS (default:“Default User”)3. Password –The password of the local user on the IRC5 controller (default: “robotics”)4. RPS Main Rapid Task – The name of the motion task used by ArtiMinds RPS for program execution(default: “T_ROB1”). The default motion task w ill be created by the ArtiMinds RPS installer if it does not exist yet.5. RPS Service Rapid Task – The name of the non-motion background task used by ArtiMinds RPS forstreaming and utility functionality (default: “T_ROB2”). The default task will be created by the ArtiMinds RPS installer if it does not exist yet.6. RPS Service Constraint Task – The name of the non-motion background task used by ArtiMinds RPSfor runtime constraint checks (default: “T_ROB3”). The default task will be created by the ArtiMinds RPS installer if it does not exist yet.1.2.2 One-Click Installation of the required components and controller settingsThe remaining installation can be done conveniently in the ArtiMinds Robot Configurator menu (“File -> Robot -> New Robot Setup”) or, in case the robot has already been configured, in the ABB settings page (“File -> Settings -> ABB”) using the button “Install RPS Configuration on Controller”.The following changes will be made on the ABB controller by the automated installation of the configuration: Installed ModulesThe following module files will be copied to the controller:∙$HOME/RPSService/RPSService.mod∙$HOME/RPSService/RPSConstraintService.mod - Since 1.14∙$HOME/RPSService/sharedTypesAndMethodsModule.mod∙$HOME/RPSService/sharedVarModule.modInstalled ConfigurationsThe following configuration entries will be added or overwritten should they already exist:1. I/O System -> Signal -> "debugWait" (Internal Signal)2. I/O System -> Signal -> "executeScript" (Internal Signal)3. I/O System -> Signal -> "forceStreaming" (Internal Signal)4. I/O System -> Signal -> "showDialog" (Internal Signal)5. Controller -> Automatic Loading of Modules -> Load sharedTypesAndMethodsModule.mod into ALLtasks6. Controller -> Automatic Loading of Modules -> Load sharedVarModule.mod as SHARED7. Controller -> Automatic Loading of Modules -> Load RPSService.mod into the RPSServiceTask(default: T_ROB2)8. Controller -> Automatic Loading of Modules -> Load RPSConstraintService.mod into theRPSConstraintTask (default: T_ROB3)9. Controller -> Task -> Main Motion Task for program execution (default: T_ROB1)10. Controller -> Task -> Background RPS Service Task for helper execution and streaming (default:T_ROB2)11. Controller -> Task -> Background RPS Constraint Task for runtime constraint checks (default: T_ROB3)1.2.3 Update an existing ArtiMinds Installation on the ABB IRC5 controllerUpdating the ArtiMinds installation can be done by performing the same steps as a fresh installation. The One-Click Installer will replace all required files and configurations automatically.Note: After updating an ArtiMinds RPS installation on the controller, all robot programs that have been compiled with previous versions of ArtiMinds RPS have to be re-compiled with the new version.1.2.4 Downgrading an existing ArtiMinds Installation on the ABB IRC5 controller Downgrading of the ArtiMinds Installation files to a previous ArtiMinds RPS version is not officially supported by the One-Click Installer and might not work depending on the used ArtiMinds RPS versions. It is recommended to remove all ArtiMinds RPS related components manually before installing an older version.1.2.5 Uninstalling an ArtiMinds RPS Installation from the ABB IRC5 controllerRemoving an existing installation can only be done manually. You can find a complete list of all installed files and configuration entries that have to be removed in chapter 1.2.2 One-Click Installation of the required components and controller settings.After uninstall, a P-Start is required to reset the RAPID modules.2 Operation2.1 General CommunicationAfter successful installation, the ABB Web Interface and the RPS Service Task will handle all communication between robot configurator and ArtiMinds RPS. If you still run into trouble, make sure that:∙The RPS User has all required grants to interact with the robot as specified in chapter 1.1.2 Required software packages. Missing grants should also be reported by ArtiMinds RPS when trying to connect to the robot for the first time. Contact your administrator to gain the required grants on the robot if necessary.∙The RPS Service Task is running on the robot. The message “RPS Service Module started” in the robot’s log after startup should confirm this. A missing RPS Service Task should also be reported by ArtiMinds RPS when trying to connect for the first time. (Re-) installing the ArtiMinds RPS Setup on the robot should solve this problem∙All required software options are installed on the robot as specified in chapter 1.1.2 Required software packages. Missing software options should be reported by ArtiMinds RPS when trying to connect for the first time. Contact your administrator to install missing options.∙The communication is not blocked by your PC’s firewall.2.2 Moving the robot2.2.1 Manual Mode1. Start your program through the red or green buttons within ArtiMinds RPS.2. A message will now pop up on the teach panel, asking for access to the controller’s functions. Press…Grant“ to allow this.3. A second message will pop up, requiring clearance to move the robot. This needs to be confirmed viaan ABB-mechanism: Toggle the clearance button 3 times within 5 seconds to confirm program start.4. Immediately afterwards, press and hold the clearance button again to enable motors and start theprogram.5. You will need to keep the clearance button pressed during the whole duration of the program in manualmode.2.2.2 Auto Mode1. Start your program through the red or green button within ArtiMinds RPS2. No further interaction is requiredThe program will start immediately in automatic mode!3 Trouble-shootingConnection to robot fails∙Possible reasons for connection problems should be reported as an error message when trying to connect.∙Otherwise, make sure to check the list in chapter 2.1 General Communication and make sure that requirements for the robot connection are met.Robot goes into error state, either the RPS Service Task or the RPS Constraint Task stopped∙This indicates an unexpected error within one of these tasks. Restarting the controller should reset them.∙In RobotWare versions earlier than v6.10.2, the controller could run into such an error when trying to connect to an IP address outside of its reachable address space. This can be caused by faulty IP addresses of the host PC or a configured camera system.4 VisionFor all currently supported +Vision systems, it is sufficient to make sure that the detector shares a network connection with the robot controller and that the detector’s IP address can be reached from the controller.To setup TCP/IP connections from the robot controller, the option 616-1 PC Interface is required.Once the detector is reachable from the robot controller, configuring the detectors IP address in the ArtiMindsRPS vision settings should be enough to get the connection to work.5 ForcePlease note that the +Force functionality in ArtiMinds RPS requires additional ABB software packages. More details can be found in chapter 1.1.2 Required software packages.Before using a Force-Torque-Sensor (FTS) with ArtiMinds RPS, follow the installation instructions by ABB to connect the sensor to the controllers voltage measurement box and load the calibration file onto the robot controller.When configuring a new ABB robot with FTS in ArtiMinds RPS, please make sure that the transformations of the sensor in the Robot Configurator (in sub-step “Mounting: Force Torque Sensor) matches the transformations defined on the robot controller. You can find the controller’s FTS transformations in “Configuration -> Topic Motion -> FC Sensor”.6 Error reportingWhen encountering an error, please provide the following information to the ArtiMinds Robotics Support (*********************):1. ArtiMinds RPS log file ( \documents\ArtiMinds RPS\inrop.log )2. Describe the actions that lead to the error3. ABB robot debug outputa. On the ABB teach pendant, press the long bar on the topb. Logging messages from the ArtiMinds RPS Communicator are printed on this screen4. .artm file of the projectNotesChangelogv1.0 initial versionv1.1 Added sub-chapters for Force and Vision。
江苏MINO ABB操作说明
Mino/JiangsuChina4-Hi rev Mill1000755Operators InstructionStressometer操作说明Flatness Control SystemVersion 7.0板形控制系统INTRODUCTION介绍1.1Operator equipment.操作设备1.2The technology工艺技术.2.OPERATION 操作2.1The Stressometer screen操作画面2.2Starting up the computer启动计算机2.3Shutting down the HMI关闭HMI系统2.4Restarting the HMI.重新启动HMI系统2.5Shutting down the computer关闭计算机2.6Printing the screen.打印画面3.FUNCTIONS功能3.1Flatness measurement板形测量...3.1.1Measuring principle测量原理3.1.2Flatness target model.板形目标曲线模型3.1.3Target compensation.目标补偿.3.1.4Flatness compensation测量补偿(板形补偿).3.1.5Edge indication.边部显示3.2Flatness control.板形控制..4.OPERATOR DISPLAYS操作显示4.1The diagram area图形区域.4.1.1Measured flatness-Normal resolution板形测量-常规的曲线分辨率4.1.2Measured flatness-High resolution.板形测量- 高的曲线分辨率4.1.3Actuator positions..控制器位置4.1.4Target model preview目标曲线预览4.1.5Flatness error测量偏差4.1.6Target compensation目标补偿4.1.7Flatness compensation.测量补偿4.2The parameter area参数设定区域4.2.1Control data控制数据4.2.2Rolling data 轧制数据4.2.3Target and comp.details目标曲线和补偿详细资料4.2.4Control details(mech.)控制详细资料(机械部分)4.2.5Control details(cool.).控制详细资料(冷却部分)4.3Alarm and event lists报警事件目录清单5.ENTERING DATA输入数据5.1The Input window输入窗口5.2The Button bar控制按钮栏5.3Operator pulpit.操作控制台5.4Spot cooling window精细冷却窗口5.5Basic cooling window基本冷却窗口6.GENERAL INSTRUCTIONS概述6.1Modes of operation操作方法6.1.1Mechanical actuator window机械控制窗口6.1.2Spot cooling control精细冷却控制系统6.1.3Basic cooling control .基础冷却控制系统6.2Automatic flatness control板形自动控制系统6.3About target model selection关于目标曲线的选择1. INTRODUCTION介绍This document is intended for mill operators using the Stressometer Human Machine Interface (HMI).It deals with the following:An introduction to the technology used by the HMI.HMI operation, start up and shut down procedures.Fundamental Stressometer functions.Description of HMI displays available for the operator. Alarmand event lists.Entering data into the Stressometer.The reader is supposed to have a basic knowledge about the Microsoft Windows 2000 Professional operating environment. That is knowledge about:Logging in.Usi ng the “S t art”-button and the taskbar.Maximizing, minimizing, resizing and closing windows.Shutting down the computer.1. 介绍本资料打算供使用人机接口(HMI)的轧机操作工使用。
ABB变频器本地控制操作说明

1:给本地控制控模式设定给定频率,按一下键,屏幕出现reF,再按一下屏幕出现(或者别的数值), 按加减速键调整频率的给定值。
最
后按键退回到初始画面。
2:变频器在正常工作时, 处于远控模式(REM),要切到本地(LOC) ,使用控制盘控制变频器,按一下键,当屏幕左上角显示为LOC时,即为本地控制。
此时按下
START键,变频器即可启动,频率值为reF 里的给定值,按下
STOP键,变频器停止工作。
3:在本地控制模式中,当电机反转时,此键可切换电机的正反转。
4:要切回远程控制(REM) 使用控制盘控制变频器,按一下键,当屏幕左上角显示为REM时,即远程控制。
ABB机器人简单操作指南【精选文档】

ABB机器人简单操作指南1 机器人主要由以下两部分组成控制柜机械手控制柜和机械手之间由两条电缆连接可以用示教器或位于控制柜上的操作盘来控制机械手,见下图2 机械手下图显示了机械手上不同的轴的可移动的方向3 控制柜下图显示了控制柜的主要部分示教器操作盘主开关驱动磁盘4 操作盘下图描述了操作盘的功能电机开按钮及指示灯操作模式选择开关急停,如果按下请拉出来工作时间计数器,显示机械手的工作时间电机开在电机开状态,机器人的电机被激活,Motors On按钮保持常亮。
常亮准备执行程序快速闪烁(4Hz) 机器人没有校准或选择计数器没有更新。
电机已经打开。
慢速闪烁(1Hz)一个保护停机被激活,电机关闭.工作模式自动(生产模式)在这个模式下,当运行准备就绪后,不能用控制杆手动移动机器人工作模式手动减速运行(程序模式)在机器人工作区域里面对其编程时候。
也用于在电机关状态设置机器人。
工作模式手动全速(选择,测试模式)用来在全速情况下运行程序急停当按下按钮时,无论机器人处于什么状态都立即停止。
要重新启动需将按钮恢复工作时间计数器显示机械手工作的时间5 示教器见下图控制运行使能设备显示屏控制杆急停按钮手动慢速运行:打开手动慢速运行窗口编程:打开编程及测试窗口输入/输出:打开输入输出窗口,用来手动操作输入输出信号其它:打开其它窗口如系统参数,维护,生产及文件管理窗口.停止:停止程序执行对比度: 调节显示屏的对比度菜单键: 按下后显示包含各种命令的菜单功能键: 按下后直接选择各种命令动作单元: 按下后手动慢速运行机器人或其它机械元件动作形式: 按下后选择怎样手动慢速运行机器人,再定位或直线动作形式: 轴-轴移动。
1=轴1-3,2=轴4-6增加: 增加手动慢速运行开/关列表:按下后将指针从一个窗口移到另一个窗口(通常由双画线分开)返回/翻页:按下翻页或返回上级菜单删除:删除选中的参数确认:按下输入数据上下键: 上下移动指针左右键:左右移动指针编程键: 怎样定义这些键,见第10章,系统参数-示教器5。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
REL511保护人机对话操作菜单中英文对照
DisturbReport
扰动报告
Disturbances
扰动报告
Disturbance1
第一个扰动报告
-
-
Disturbance10
第十个扰动报告
ManualTrig
手动触发
ClearDistRep
清除扰动报告
ServiceReport
服务报告
ServiceValues
服务报告值
U, I, P, Q, S, f, InegSeq
Phasors
采样值
Primary
一次采样值
Secondary
二次采样值
Functions
功能
Impedance
阻抗保护
General
一般测量值值
ImpValues
阻抗测量值
ImpDriction
阻抗方向元件测量值
HighSpeedBO
快速距离保护二进制输出
FunOutPuts
HSBO-ERROR TRL1 TRL2 TRL3 CSL1 CSL2 CSL3 CSMPH
输出模块故障跳A相跳B相跳C相A相发信B相发信C相发信
三相发信
Zone1
阻抗一段
FunOutPuts
功能输出
ZM1-TRIP, ZM1-TRL1, ZM1-TRL2, ZM1-TRL3,
阻抗一段出口,阻抗一段A、B、C相出口
ZM1-START, ZM1-STL1, ZM1-STL2, ZM1-STL3,
阻抗一段起动,阻抗一段A、B、C相起动
ZM1-STND
阻抗一段无方向起动
Zone2
阻抗二段
FunOutPuts
功能输出
ZM2-TRIP, ZM2-TRL1, ZM2-TRL2, ZM2-TRL3,
阻抗二段出口,阻抗二段A、B、C相出口
ZM2-START, ZM2-STL1, ZM2-STL2, ZM2-STL3,
阻抗二段起动,阻抗二段A、B、C相起动
ZM2-STND
阻抗二段无方向起动
Zone3
阻抗三段
FunOutPuts
功能输出
ZM3-TRIP, ZM3-TRL1, ZM3-TRL2, ZM3-TRL3,
阻抗三段出口,阻抗三段A、B、C相出口
ZM3-START, ZM3-STL1, ZM3-STL2, ZM3-STL3,
阻抗三段起动,阻抗三段A、B、C相起动
ZM3-STND
阻抗三段无方向起动
Zone4
阻抗四段
FunOutPuts
功能输出
ZM4-TRIP, ZM4-TRL1, ZM4-TRL2, ZM4-TRL3,
阻抗四段出口,阻抗四段A、B、C相出口
ZM4-START, ZM4-STL1, ZM4-STL2, ZM4-STL3,
阻抗四段起动,阻抗四段A、B、C相起动
ZM4-STND
阻抗四段无方向起动
Zone5
阻抗五段
FunOutPuts
功能输出
ZM5-TRIP, ZM5-TRL1, ZM5-TRL2, ZM5-TRL3,
阻抗五段出口,阻抗五段A、B、C相出口
ZM5-START, ZM5-STL1, ZM5-STL2, ZM5-STL3,
阻抗五段起动,阻抗五段A、B、C相起动
ZM5-STND
阻抗五段无方向起动
PowerSwingDet
振荡闭锁
FunOutPuts
功能输出
PSD-START
振荡闭锁起动
SwitchOnToFlt
阻抗合于故障后加速
FunOutPuts
功能输出
SOTF-TRIP
合于故障出口
TimeDelayOC
定时限过流
TOC-TRIP, TOC-TRP, TOC-TRN, TOC-STP, TOC-STL1,
过流三段出口,相过流出口,零序过流出口,相过流起动,A相过流起动,TOC-STL2, TOC-STL3, TOC-STN
B相过流起动,C相过流起动,零序过流起动
BreakerFailure
断路器失灵
DeadLineDet
无压无流检测
FunOutPuts
功能输出
DLD-START, DLD-STIL1, DLD-STL2, DLD-STL3,
无压无流检测起动,A相无流检测,B相无流检测,C相无流检测,
DLD-STUL1, DLD-STUL2, DLD-STL3, DLD-STPH
A相无压检测,B相无压检测,C相无压检测,
FuseFailure
PT断线监视
FunOutPuts
功能输出
FUSE-VTSU, FUSE-VTSZ, FUSE-VTF3PH
PT断线电压监视,PT断线阻抗监视,PT断线三相电压监视,Settings
定值组
DisturbReport
扰动报告
Operation
扰动报告投退控制字
SequenceNo
故障次序
SamplingRate
采样率
RecordingTimes
记录时间
BinarySignals
二进制输入信号
Functions
功能
Group1
定值组一
Impendance
阻抗保护
General
最小精工电流
Direction
阻抗方向
Zone1
阻抗一段
Zone2
Zone3
Zone4
Zone5
PowerSwingDet
振荡闭锁
SwitchOnToFlt
合于故障后加速
TimeDelayOC
定时限过流
Operation
定时限过流控制字
Ip> TP IN> tN
相过流相过流时间零序过流零序过流时间
BreakerFailure
失灵保护
DeadLineDet
无压无流检测
FuseFailure
PT断线
ZeroSeq 3U0 I DV DI
零序投退零序最小动作电流电压突变量电流突变量Group2
Group3
Group4
TerminalReport
装置报告
SelfSuperv
自检
IdentityNo
装置鉴别号
Modules
模块
AnglogInputs
模拟量输入
Configruration
装置配置
AnalogInputs
模拟量输入
IO-Modules
输入输出模块
TerminalCom
装置通讯
SPACom
SPA通讯规约
Rear Front
后台通讯前台通讯
LONCom
LON通讯规约
Time
时钟同步
LocalHMI
就地人机对话
Identities
装置身份鉴别
Test
测试
TestMode
测试模式
ConfiguMode
配置模式。