cortex-m3实用教程
Cortex-M332位数据操作指令

名字功能带进位加法加法宽加法(可以加位立即数)按位与(原文是逻辑与,有误——译注)算术右移位清零(把一个数按位取反后,与另一个数逻辑与)位段清零位段插入负向比较(把一个数和另一个数地二进制补码比较,并更新标志位)比较两个数并更新标志位计算前导零地数目按位异或逻辑左移逻辑右移乘加乘减把位立即数放到寄存器地底位,高位清加载位立即数到寄存器(其实汇编器会产生——译注)把位立即数放到寄存器地高位,低位不影响移动一个数地补码乘法按位或(原文为逻辑或,有误——译注)把源操作数按位取反后,再执行按位或(原文为逻辑或,有误——译注)位反转(把一个位整数先用进制表达,再旋转度——译注)对一个位整数做按字节反转对一个位整数地高低半字都执行字节反转对一个位整数地低半字执行字节反转,再带符号扩展成位数圆圈右移带进位地逻辑右移一格(最高位用填充,且不影响地值——译注)从一个位整数中提取任意地位段,并且带符号扩展成位整数带符号除法带符号长乘加(两个带符号地位整数相乘得到位地带符号积,再把积加到另一个带符号位整数中)带符号长乘法(两个带符号地位整数相乘得到位地带符号积)带符号地饱和运算带借位地减法减法宽减法,可以减位立即数字节带符号扩展到位数测试是否相等(对两个数执行异或,更新标志但不存储结果)测试(对两个数执行按位与,更新标志但不存储结果)无符号位段提取无符号除法无符号长乘加(两个无符号地位整数相乘得到位地无符号积,再把积加到另一个无符号位整数中)无符号长乘法(两个无符号地位整数相乘得到位地无符号积)无符号饱和操作(但是源操作数是带符号地——译注)字节被无符号扩展到位(高位清——译注)半字被无符号扩展到位(高位清——译注)。
第2讲 CortexM3应用举例与培训平台介绍PPT课件

USER I/O
WDT USER I / O E_LAB
I C CARD
74LS273 74LS244
USER I / O
LED DI SP
HD7279
DC MOTOR
STEP MOTOR
16X16 LLeabharlann D点 点 UART I NTERFACE
RS485 CAN
TEMP SENSOR
RS232
BUZZER PHOTO AD点 点 点 点
4、两路UART:一路引到插针上,另一路既引到插针 上也和FT2232的空闲UART模块连接。
5、JTAG防锁死按键。(非常实用)
17
如何预防 JTAG失效?
一、JTAG简介
JTAG是一种国际标准测试协议(IEEE 1149.1 兼容) ,主要用于芯片内部测试。 现在多数的高级器件都支持 JTAG协议,如 ARM、DSP、FPGA 器件等。标准的 JTAG 接口是 4 根线:测试模式选择 TMS、测试 时钟 TCK、测试数据输出 TDO,测试数据 输入 TDI。在实际系统中可能还有测试复位 TRST,低电平有效。
通用焊 接板
焊接适 配板
参赛作品展
10
基于Cortex-M3的竞赛作品展示—— 微型打印机电子系统
基于EXP-LM3S3749开发板、 微型打印机模块、E-TRY竞赛平
台 完成的竞赛作品
11
基于Cortex-M3的竞赛作品展示—— 射频IC认证电子系统
基于EXP-LM3S6952 开发板、 RFID射频IC模块、E-TRY竞赛平
15
16
TI_OEM_LM3S811开发板:
1、供电部分:本板卡可以使用USB口供电,仿真供 电两不误,很方便。也可以外部5V供电。(通过 切换电源输入选择开关)
cortex m3 原子操作

cortex m3 原子操作Cortex M3 原子操作Cortex M3 是英特尔公司开发的低功耗处理器,经常用于嵌入式系统和物联网设备中。
它具有低功耗、高性能和高度可靠性的特点,因此在各种应用中广泛应用。
在处理器的指令集中,Cortex M3 引入了一种称为原子操作的特殊指令,用于处理多线程并发操作时的数据一致性问题。
本文将介绍Cortex M3 原子操作的概念、应用、实现原理和性能优化等方面的内容。
一、概念原子操作是指在执行期间不能被中断的操作。
在多线程并发的环境下,如果不采取特殊的措施,可能会出现竞态条件(Race Condition)的问题,即多个线程同时读写共享数据时可能导致数据的不一致性。
为了解决这个问题,Cortex M3 引入了原子操作指令,确保多个线程在执行原子操作时不会被中断,从而保证了数据的一致性。
二、应用原子操作在多线程编程中具有广泛的应用。
例如,在一个多线程任务中,多个线程可能同时访问一个共享的计数变量,用来记录某个事件发生的次数。
如果不使用原子操作,可能会出现线程A 正在对计数变量进行递增操作时,线程B 同时也在对其进行递增操作,导致计数结果错误。
为了解决这个问题,可以使用原子操作实现对计数变量的原子递增操作,从而避免竞态条件的发生。
三、实现原理Cortex M3 使用一种称为“中断屏蔽”的机制来实现原子操作。
当一个线程执行一个原子操作时,处理器会禁用中断,从而确保这个线程不会被其他线程的中断打断。
在这个过程中,处理器会将中断状态保存在特殊的寄存器中,以便在原子操作执行完成后恢复。
在Cortex M3 中,原子操作可以通过使用指令集中的LDREX 和STREX 指令来实现。
LDREX(Load Exclusive)指令用于加载一个字或半字的原子操作,STREX(Store Exclusive)指令用于存储一个字或半字的原子操作。
这两个指令可以在执行期间禁用中断,保证了原子操作的执行不会被中断打断。
Cortex-M3 权威指南

Cortex-M3权威指南J oseph Yiu 著宋岩译热心网友校对网络版初稿的译序我接触ARM的历史约4年,早期是很欣赏这类处理器,到了后来切身使用它们的机会越来越多,慢慢地有了感觉,也更加喜欢了。
在偶然听说Cortex-M3后,我就冥冥地感到它不寻常。
只是因为其它工作一直没有去了解它,直到今年初才进一步学习,很快就觉得相知恨晚。
当时只能看ARM官方的重量级资料,在看到这本书的英文原稿后,更感觉被电到了一样,于是突然有了把它翻译成中文的冲动。
经过累计约150个小时的奋战,终于有了此译稿。
在翻译过程中,我始终采用下列指导思想:1.尽量使用短句,并且把句子口语化。
我认为高深的道理不一定要用高级的语法句型才能表达。
想想看,即使是几位博士互相聊天讨论一个课题,也还是使用口语吧,而且火花往往就是在这种讨论中产生呢!2.多用修辞方法,并且常常引用表现力强的词汇——甚至包括网络用语和脍炙人口的歌词。
另外,有时会加工句子,使得风格像是对话。
这样做的目的是整个文风更鲜活——有点像为写出高分作文而努力的样子。
这点可能与很多学术著作的“严肃、平实”文风不同,也是一次大胆的尝试。
还希望读者不吝给予反馈。
3.在“宏观”上直译,在“微观”上意译。
英语不仅单一句子的语法和汉语不同,并且句子的连贯方式也与汉语不同。
因此在十几个到几十个单词的范围内,我先把它们翻译成脑子里的“中间语言”,再把中间语言翻译成汉语。
这样,就最大地避免了贻笑大方的“英式汉语”。
4.有些术语名词不方便翻译成汉语,或者目前的翻译方式不统一,或者与其它术语翻译的结果很接近,如error和fault,就只能用英语意会。
此时我就保留英文单词,相信这样比硬生生地翻译成汉语还好。
这些词汇主要是:retarget, fault, region等。
另外,英文中有一个很能精练表达“两者都”意思的单词及其用法:”both”,我也常常保留之。
5.图表对颜色的使用比较丰满,尤其是比较大型的插图,相信这样能帮助读者分析和理解。
Cortex-M3指令集
举,不过汇编器可能仍然允许这样的语法。
再次重申,这是ARM 公司汇编器的语法,其它汇编器的可能略有区别,
但如果没有给出后缀,汇编器就总是会尽量选择更短的指令。
其实在绝大多数情况下,程序是用C 写的,C 编译器也会尽可能地使用短指
Decrement)基址寄存器Rd的值,时机是在每次访问前(Before)或访问
后(After)。增/减单位:字(4 字节)。例如,记R8=0x8000,则下面两
条指令:
STMIA.W R8!, {r0-R3}
; R8 值变为0x8010,每存一次曾一
次,先存储后自增
STMDB.W R8, {R0-R3}
S: 饱和标志(Saturation),它不做条件转移的依据
16 位数据操作指令
未支持的指令
有若干条Thumb 指令没有被Cortex‐M3 支持,下表列出了没有被支持的指令,
以及不支持的原因。
有少量在ARMv7‐M 中列出的指令不被CM3 支持。其中v7M 允许Thumb2 的
能让程序更易理解。
还可以使用EQU 指示字来定义常数,然后在代码中使用它们,例如:
NVIC_IRQ_SETEN0 EQU 0xE000E100
NVIC_IRQ0_ENABLE EQU 0x1
…
LDR R0, =NVIC_IRQ_SETEN0
;在这里的LDR 是个伪指令,
;它会被汇编器转换成
;一条“相对PC 的加载指令”
;一个32 位的指令,跨越了字的边界
绝大多数 16 位指令只能访问R0‐R7;32 位Thumb‐2 指令则无任何限制。
Cortex M3 os使用手册
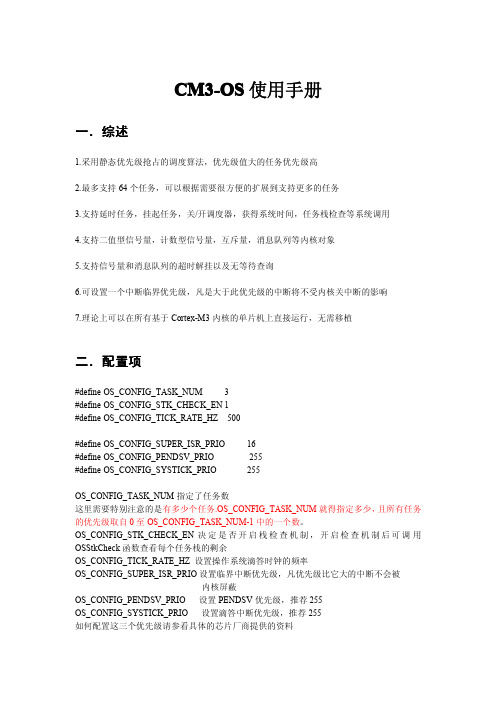
CM3-OS使用手册综述一.一.综述1.采用静态优先级抢占的调度算法,优先级值大的任务优先级高2.最多支持64个任务,可以根据需要很方便的扩展到支持更多的任务3.支持延时任务,挂起任务,关/开调度器,获得系统时间,任务栈检查等系统调用4.支持二值型信号量,计数型信号量,互斥量,消息队列等内核对象5.支持信号量和消息队列的超时解挂以及无等待查询6.可设置一个中断临界优先级,凡是大于此优先级的中断将不受内核关中断的影响7.理论上可以在所有基于Cortex-M3内核的单片机上直接运行,无需移植配置项二.二.配置项#define OS_CONFIG_TASK_NUM3#define OS_CONFIG_STK_CHECK_EN1#define OS_CONFIG_TICK_RATE_HZ500#define OS_CONFIG_SUPER_ISR_PRIO16#define OS_CONFIG_PENDSV_PRIO255#define OS_CONFIG_SYSTICK_PRIO255OS_CONFIG_TASK_NUM指定了任务数这里需要特别注意的是有多少个任务.OS_CONFIG_TASK_NUM就得指定多少,且所有任务的优先级取自0至OS_CONFIG_TASK_NUM-1中的一个数。
OS_CONFIG_STK_CHECK_EN决定是否开启栈检查机制,开启检查机制后可调用OSStkCheck函数查看每个任务栈的剩余OS_CONFIG_TICK_RATE_HZ设置操作系统滴答时钟的频率OS_CONFIG_SUPER_ISR_PRIO设置临界中断优先级,凡优先级比它大的中断不会被内核屏蔽OS_CONFIG_PENDSV_PRIO设置PENDSV优先级,推荐255OS_CONFIG_SYSTICK_PRIO设置滴答中断优先级,推荐255如何配置这三个优先级请参看具体的芯片厂商提供的资料三.API简介1.void OSInit(void);功能:初始化操作系统,是最先被调用的API2.bool OSCreatTask(void(*Code)(void*),void*Para,void*StkBuf,u32StkSize,const u8*TaskName,u32Prio);功能:建立任务参数:Code:任务函数指针Para:传递给任务的参数StkBuf:指向任务栈的内存空间首地址StkSize:任务栈的大小TaskName:任务名字Prio:任务优先级3.void OSStart(void);功能:启动操作系统4.void OSDelayTask(u32Ticks);功能:任务将自己挂起若干时钟5.void OSSuspendTask(u32Prio);功能:将优先级为Prio的任务挂起,可以在中断中使用6.void OSResumeTask(u32Prio);功能:将优先级为Prio的任务解挂,可以在中断中使用7.u32OSGetCurrentTick(void);功能:获得当前的系统时间,时钟数表示(void);OSGetCurrentSysMs(void);8.u32OSGetCurrentSysMs功能:获得当前的系统时间,毫秒表示void OSStkCheck(char*WriteBuf);9.9.void功能:获知任务栈的使用情况,将结果放入WriteBuf指向的缓存中10.void OSEnterCritical(void);功能:采用关中断的方式进入临界区但对高于OS_CONFIG_SUPER_ISR_PRIO的中断无效11.void OSExitCritical(void);功能:退出临界区12.void OSSchedLock(void);功能:锁调度器13.void OSSchedUnlock(void);功能:解锁调度器14.void OSSemBinCreat(OS_EVENT*EventHandle,u32State);功能:创建信号量参数:EventHandle:事件控制块指针State:0或115.void OSSemBinGive(OS_EVENT*EventHandle);功能:对信号量进行P操作参数:EventHandle:事件控制块指针16.bool OSSemBinTake(OS_EVENT*EventHandle,u32Ticks);功能:对信号量进行V操作参数:EventHandle:事件控制块指针Ticks:最长等待时间,单位Ticks1-0xfffffffe:等待的周期数OS_ALWAYS_DELAY一直等待OS_NO_DELAY不等待返回:若在截止时间内得到信号量返回TRUE,否则返回FALSE17.void OSSemCntCreat(OS_EVENT*EventHandle,u32Cnt);功能:建立计数信号量参数:EventHandle:事件控制块指针Cnt:信号量的初始值18.void OSSemCntGive(OS_EVENT*EventHandle);功能:对信号量进行P操作参数:EventHandle:事件控制块指针19.bool OSSemCntTake(OS_EVENT*EventHandle,u32Ticks);功能:对信号量进行P操作参数:EventHandle:事件控制块指针Ticks:最长等待时间,单位Ticks1-0xfffffffe:等待的周期数OS_ALWAYS_DELAY一直等待OS_NO_DELAY不等待返回:若在截止时间内得到信号量返回TRUE,否则返回FALSE20.void OSMutexCreat(OS_EVENT*EventHandle);功能:建立互斥量参数:EventHandle:事件控制块指针21.void OSMutexGive(OS_EVENT*EventHandle);功能:申请互斥量参数:EventHandle:事件控制块指针22.void OSMutexTake(OS_EVENT*EventHandle);功能:释放互斥量参数:EventHandle:事件控制块指针void OSQueueCreat(OS_EVENT*EventHandle,u32MaxNum,void**Buf);23.23.void功能:建立消息队列参数:EventHandle:事件控制块指针MaxNum:队列大小,单位是字Buf:队列用到的缓存区首地址void OSQueueSend(OS_EVENT*EventHandle,void*Msg);24.void24.功能:向消息队列发送一个消息参数:EventHandle:事件控制块指针Msg:待发送的消息bool OSQueueReceive(OS_EVENT*EventHandle,void**pMsg,u32Ticks);25.25.bool功能:从消息队列申请一个消息参数:EventHandle:事件控制块指针pMsg:存放消息的地址Ticks:最长等待时间,单位Ticks1-0xfffffffe:等待的周期数OS_ALWAYS_DELAY一直等待OS_NO_DELAY不等待使用举例四.使用举例四.void OSInit(void);bool OSCreatTask(void(*Code)(void*),void*Para,void*StkBuf,u32StkSize,const u8*TaskName,u32Prio);void OSStart(void);#include"os_cm3_api.h"#include"uart.h"__align(8)unsigned char idle_stack[256];void IdleTask(void*para){while(1){printf("My first task is running\r\n");}}int main(void){COM1_Init();OSInit();OSCreatTask(IdleTask,(void*)0,idle_stack,256,"IdleTask",0);OSStart();while(1);}void OSDelayTask(u32Ticks);void OSSuspendTask(u32Prio);void OSResumeTask(u32Prio);#include"os_cm3_api.h"#include"uart.h"__align(8)unsigned char idle_stack[256];__align(8)unsigned char task1_stack[256];__align(8)unsigned char task2_stack[256];void IdleTask(void*para){while(1){}}void Task1(void*para){while(1){OSDelayTask(500);printf("task1Resume task2\r\n");OSResumeTask(2);}}void Task2(void*para){while(1){OSSuspendTask(2);printf("task2is running\r\n");}}int main(void){COM1_Init();OSInit();OSCreatTask(IdleTask,(void*)0,idle_stack,256,"IdleTask",0);OSCreatTask(Task1,(void*)0,task1_stack,256,"Task1",1);OSCreatTask(Task2,(void*)0,task2_stack,256,"Task2",2);OSStart();while(1);}7.u32OSGetCurrentTick(void);(void);8.u32OSGetCurrentSysMsOSGetCurrentSysMs(void);void OSStkCheck(char*WriteBuf);9.9.void#include"os_cm3_api.h"#include"uart.h"__align(8)unsigned char idle_stack[256];__align(8)unsigned char task1_stack[256];__align(8)unsigned char task2_stack[256];void IdleTask(void*para){while(1){}}void Task1(void*para){while(1){printf("task1is running at%d ms\r\n",OSGetCurrentSysMs());OSDelayTask(500);}}char Buf[64];void Task2(void*para){while(1){printf("task2is running at%d ticks\r\n",OSGetCurrentTick());OSStkCheck(Buf);printf("%s",Buf);OSDelayTask(1000);}}int main(void){COM1_Init();OSInit();OSCreatTask(IdleTask,(void*)0,idle_stack,256,"IdleTask",0);OSCreatTask(Task1,(void*)0,task1_stack,256,"Task1",1);OSCreatTask(Task2,(void*)0,task2_stack,256,"Task2",2);OSStart();while(1);}void OSEnterCritical(void);void OSExitCritical(void);void OSSchedLock(void);void OSSchedUnlock(void);#include"os_cm3_api.h"#include"uart.h"__align(8)unsigned char idle_stack[256];__align(8)unsigned char task1_stack[256];__align(8)unsigned char task2_stack[256];void IdleTask(void*para){while(1){OSEnterCritical();printf("idletask is running\r\n");OSExitCritical();}}void Task1(void*para){while(1){OSSchedLock();printf("task1is running\r\n");OSSchedUnlock();OSDelayTask(1);}}void Task2(void*para){while(1){printf("task2is running\r\n");OSDelayTask(1);}}int main(void){COM1_Init();OSInit();OSCreatTask(IdleTask,(void*)0,idle_stack,256,"IdleTask",0);OSCreatTask(Task1,(void*)0,task1_stack,256,"Task1",1);OSCreatTask(Task2,(void*)0,task2_stack,256,"Task2",2);OSStart();while(1);}void OSSemBinCreat(OS_EVENT*EventHandle,u32State); void OSSemBinGive(OS_EVENT*EventHandle);bool OSSemBinTake(OS_EVENT*EventHandle,u32Ticks);#include"os_cm3_api.h"#include"uart.h"__align(8)unsigned char idle_stack[256];__align(8)unsigned char task1_stack[256];__align(8)unsigned char task2_stack[256];OS_EVENT SemBin;void IdleTask(void*para){while(1){}}void Task1(void*para){while(1){OSDelayTask(500);printf("task1give sembin\r\n");OSSemBinGive(&SemBin);}}void Task2(void*para){while(1){OSSemBinTake(&SemBin,OS_ALWAYS_DELAY);printf("task2get sembin\r\n");}}int main(void){COM1_Init();OSInit();OSSemBinCreat(&SemBin,0);OSCreatTask(IdleTask,(void*)0,idle_stack,256,"IdleTask",0);OSCreatTask(Task1,(void*)0,task1_stack,256,"Task1",1);OSCreatTask(Task2,(void*)0,task2_stack,256,"Task2",2);OSStart();while(1);}void OSSemCntCreat(OS_EVENT*EventHandle,u32Cnt); void OSSemCntGive(OS_EVENT*EventHandle);bool OSSemCntTake(OS_EVENT*EventHandle,u32Ticks);#include"os_cm3_api.h"#include"uart.h"__align(8)unsigned char idle_stack[256];__align(8)unsigned char task1_stack[256];__align(8)unsigned char task2_stack[256];OS_EVENT SemCnt;void IdleTask(void*para){while(1){}}void Task1(void*para){while(1){OSDelayTask(500);printf("task1give semcnt\r\n");OSSemCntGive(&SemCnt);}}void Task2(void*para){while(1){OSSemCntTake(&SemCnt,OS_ALWAYS_DELAY);printf("task2get semcnt\r\n");}}int main(void){COM1_Init();OSInit();OSSemCntCreat(&SemCnt,5);OSCreatTask(IdleTask,(void*)0,idle_stack,256,"IdleTask",0);OSCreatTask(Task1,(void*)0,task1_stack,256,"Task1",1);OSCreatTask(Task2,(void*)0,task2_stack,256,"Task2",2);OSStart();while(1);}void OSMutexCreat(OS_EVENT*EventHandle); void OSMutexGive(OS_EVENT*EventHandle); void OSMutexTake(OS_EVENT*EventHandle);#include"os_cm3_api.h"#include"uart.h"__align(8)unsigned char idle_stack[256];__align(8)unsigned char task1_stack[256];__align(8)unsigned char task2_stack[256];OS_EVENT Mutex;void IdleTask(void*para){while(1){}}u32Var;void Task1(void*para){while(1){OSMutexTake(&Mutex);Var=1;printf("task1set Var=1\r\n");printf("Now Var=%d\r\n",Var);OSMutexGive(&Mutex);}}void Task2(void*para){while(1){OSMutexTake(&Mutex);Var=0;printf("task2set Var=0\r\n");printf("Now Var=%d\r\n",Var);OSMutexGive(&Mutex);OSDelayTask(1);}}int main(void){COM1_Init();OSInit();OSMutexCreat(&Mutex);OSCreatTask(IdleTask,(void*)0,idle_stack,256,"IdleTask",0);OSCreatTask(Task1,(void*)0,task1_stack,256,"Task1",1);OSCreatTask(Task2,(void*)0,task2_stack,256,"Task2",2);OSStart();while(1);}void OSQueueCreat(OS_EVENT*EventHandle,u32MaxNum,void**Buf); void OSQueueSend(OS_EVENT*EventHandle,void*Msg);bool OSQueueReceive(OS_EVENT*EventHandle,void**pMsg,u32Ticks);#include"os_cm3_api.h"#include"uart.h"__align(8)unsigned char idle_stack[256];__align(8)unsigned char task1_stack[256];__align(8)unsigned char task2_stack[256];OS_EVENT Queue;void*QueueBuf[8];void IdleTask(void*para){while(1){}}u32Var;void Task1(void*para){while(1){printf("task1set717to queue\r\n");OSQueueSend(&Queue,(void*)717);OSDelayTask(500);}}void Task2(void*para){u32Data=0;while(1){OSQueueReceive(&Queue,(void**)&Data,OS_ALWAYS_DELAY);printf("task2receive data from queue,data=%d\r\n",Data);}}int main(void){COM1_Init();OSInit();OSQueueCreat(&Queue,8,QueueBuf);OSCreatTask(IdleTask,(void*)0,idle_stack,256,"IdleTask",0);OSCreatTask(Task1,(void*)0,task1_stack,256,"Task1",1);OSCreatTask(Task2,(void*)0,task2_stack,256,"Task2",2);OSStart();while(1);}四.版本记录*发布日期*作者*简述2011-12-8陈昱第一版。
NXP Cortex-M3 LPC1768基础教程

NXP Cortex NXP Cortex--M3 LPC1768基础教程基础教程活生变改技科生变改技科 好美更活生让子电美更活生让子电作者作者::天下的人天下的人时间时间::2010年9月2日 邮箱邮箱::zdeh726@ zdeh726@写在前面写在前面首先说一说为什么写这个教程,转眼间就毕业了,学校的日子还没有过够。
就要工作了,由于需要想要搞一搞ARM M3,很显然芯片选型落在了STM32和NXP的LPC17XX上了。
最后选择了LPC1768这款型号,买开发板、学习(以前我只用过单片机和一点点STM32),学习的过程还算顺利,找到了ZLG翻译的中文资料和3个版本的例程。
学习开始了,从LED灯、串口、AD、到内部定时器等等。
学习的过程夹杂着心酸和喜悦,在学习的过程中发现网络上还没有现成的学习资料。
市场上的开发板的一部分不是自己开发的都是参考的NXP和ARM公司的官方版本,其实这本身并没有什么不好,但是后面的问题出来了,程序注释不详细,除了手册就没有参考资料了。
所以在学习的过程中就在想要是把自己学习的过程总结一下,出一点资料,为那些奋斗在学习一线的电子爱好者出一份力,这是一件多么令人高兴的事呀!于是有了今天这个教程的诞生。
在这里首先要感谢的是ZLG公司为这个系列芯片提供了中文参考资料,其次感谢该公司注释比较详尽的程序,为我的学习和应用提供了不少帮助。
关于同是ARM M3内核的STM32和LPC17XX比较,我想大家争论最大的地方是价格。
我想说的是LPC17XX是NXP公司推出的基于M3内核比较高端的芯片。
应该拿STM32中高端芯片和LPC17XX比较。
我曾经买过几片stm32f103VET6是100脚512KB flash、64KB SRAM、72MHz、AD、DA、定时器、USB从机和FSMC。
而LPC1768,100脚、512KB flash、64KB SRAM、100MHz、AD、DA、32位定时器、USB主/从/OTG、以太网、电机控制PWM、正交编码器接口等。
CortexM3技术参考手册

CortexM3技术参考手册CortexM3技术参考手册CortexM3是一种基于ARMv7架构的32位微控制器,由ARM公司开发。
它是一种高效、可编程的微控制器,适用于各种嵌入式应用,如工业控制、汽车电子、智能家居等。
本文将介绍CortexM3的技术参考手册,帮助读者更好地了解该微控制器的功能和使用方法。
一、CortexM3架构CortexM3采用ARMv7架构,支持Thumb和Thumb-2指令集。
它采用32位处理器,具有较高的处理效率和灵活的编程能力。
该微控制器具有以下主要特点:1、处理速度:CortexM3采用ARMv7架构,最高运行速度可达100MHz。
2、存储器:CortexM3内置32KB的Flash存储器,可用于存储程序代码和数据。
此外,它还内置了4KB的SRAM,用于存储临时数据。
3、外设接口:CortexM3具有多种外设接口,包括UART、SPI、I2C、ADC等,可满足各种不同的应用需求。
4、调试接口:CortexM3内置调试接口,方便开发人员对程序进行调试和仿真。
二、CortexM3编程CortexM3的编程主要涉及硬件抽象层(HAL)和驱动程序(Driver)的开发。
其中,HAL提供了一组标准的接口函数,用于访问CortexM3的硬件资源。
驱动程序则是在HAL的基础上开发的,用于实现具体的硬件功能。
三、CortexM3应用实例下面以一个简单的例子来说明如何使用CortexM3实现一个基于UART 的通信接口。
1、硬件连接:将CortexM3的UART接口与另一台设备通过串口连接。
2、软件设置:在CortexM3的HAL中配置UART接口的波特率、数据位、停止位等参数。
3、编写程序:编写一个简单的程序,通过UART接口发送和接收数据。
4、调试与测试:通过调试接口对程序进行调试和测试,确保通信正常。
四、总结本文介绍了CortexM3的技术参考手册,包括其架构、编程和应用实例等。
ARMCortex-M3权威指南-基础(1)

指令和存储总线:有两条代码存储区总线负责对代码存储区的访问,分别是 I-Code 总线和 D-Code 总线。前者用于取指,后者用于查 表等操作,它们按最佳执行速度进行优化。 系统总线:用于访问内存和外设,覆盖的区域包括 SRAM,片上外设,片外 RAM,片外扩展设备,以及系统级存储区的部分空间。 私有外设总线:负责一部分私有外设的访问,主要就是访问调试组件。它们也在系统级存储区。
2. CONTROL[0]:仅当在特权级下操作时才允许写该位。一旦进入了用户级,唯一返回特权级的途径,就是触发一个(软)中断,再由 服务例程改写该位。
操作模式和特权级别
操作模式:处理者模式(handler mode)和线程模式(thread mode)。引入两个模式的本意,是用于区别普通应用程序的代码和异常服 务例程的代码——包括中断服务例程的代码。 特权分级:特权级和用户级。这可以提供一种存储器访问的保护机制,使得普通的用户程序代码不能意外地,甚至是恶意地执行涉及 到要害的操作。处理器支持两种特权级,这也是一个基本的安全模型。
特权级和用户级区别:在 CM3 运行主应用程序时(线程模式),既可以使用特权级,也可以使用用户级;但是异常服务例程必须在特 权级下执行。复位后,处理器默认进入线程模式,特权极访问。在特权级下,程序可以访问所有范围的存储器并且可以执行所有指 令。
特权级和用户级切换:在特权级下的程序可以为所欲为,但也可能会把自己给玩进去——切换到用户级。一旦进入用户级,再想回来 就得走“法律程序”了——用户级的程序不能简简单单地试图改写 CONTROL 寄存器就回到特权级,它必须先“申诉”:执行一条系统调用 指令(SVC)。这会触发 SVC 异常,然后由异常服务例程(通常是操作系统的一部分)接管,如果批准了进入,则异常服务例程修改 CONTROL 寄存器,才能在用户级的线程模式下重新进入特权级。事实上,从用户级到特权级的唯一途径就是异常:如果在程序执行 过程中触发了一个异常,处理器总是先切换入特权级, 并且在异常服务例程执行完毕退出时,返回先前的状态。 引入特权级和用户级目的:能够在硬件水平上限制某些不受信任的或者还没有调试好的程序,不让它们随便地配置涉及要害的寄存 器,因而系统的可靠性得到了提高。
cortex-M3 片上可编程系统原理及应用教学课件第10章 USB总线模块

1001
1010 1011
忽略
忽略 接受
1101 1101
忽略 忽略
忽略 忽略 接受
ACK IN(STALL=1) 1101 Reserved 1110 ACK IN-Status 1111 OUT
USB总线模块 --USB模块结构(串行接口引擎SIE)
SIE也报告发送错误,USB_SIE_EPx_CR0寄存器的 比特为“err_in_txn“表示错误的发生。 当设置该位时,当它接收到来自主机的其它IN令牌 时,硬件自动重发相同的数据。 这种重发只出现在存储转发模式下。在直通模式 下,通过固件读取该位来确定重发数据。
USB模块结构
--串行接口引擎SIE
模式 Disable NAK IN/OUT Status OUT only STALL IN/OUT Reserved ISO OUT Status IN only 编码 0000 0001 0010 0011 0100 0101 0110 SETU IN P 忽略 忽略 接受 不响应 接受 OUT 描述 忽略 忽略所有USB端点的流量 不 响 不接收 IN 和OUT 令牌 应 阻止 检查 设置该模式时,接受一个SETUP令牌。在 IN令牌的情况下,阻止;在OUT令牌的情 况下,用零长度的包响应。用于控制端点。 阻止 阻止 设置该模式时,接受一个SETUP令牌。在 IN和OUT令牌的情况下,阻止。用于控制 端点。 忽略 忽略 忽略 一直 同步 OUT TX 0 字 阻止 设置该模式时,接受一个SETUP令牌,在 OUT令牌的情况下,阻止;在IN令牌的情 节 况下,用零长度的包响应。用于控制端点。
这个模块的寄存器主要用于配置数据端点操作和控 制端点的数据缓冲。寄存器也控制每个端点可用的中断。 SIE在每次传输结束后产生中断。使用 USB_SIE_INT_EN寄存器可以使能/禁止端点的中断。通 过USB_SIE_INT_SR寄存器可以得到端点的中断状态。
Cortex-M3 技术参考手册

Cortex-M3技术参考手册目录前言 (1)关于本手册 (1)第1章概述 (3)1.1 关于处理器 (3)1.2 处理器的组件 (4)1.2.1 Cortex-M3的层次和实现的选项 (5)1.2.2 处理器内核 (6)1.2.3 NVIC (7)1.2.4 总线矩阵 (7)1.2.5 FPB (8)1.2.6 DWT (8)1.2.7 ITM (8)1.2.8 MPU (8)1.2.9 ETM (8)1.2.10 TPIU (8)1.2.11 SW/JTAG-DP (9)1.3 可配置的选项 (9)1.3.1 中断 (9)1.3.2 MPU (9)1.3.3 ETM (9)1.4 指令集汇总 (9)第2章编程模型(programmer's model) (17)2.1 关于编程模型 (17)2.1.1 工作模式 (17)2.1.2 工作状态 (17)2.2 特权访问和用户访问 (17)2.2.1 主堆栈和进程堆栈 (18)2.3 寄存器 (18)2.3.1 通用寄存器 (18)2.3.2 特殊用途的程序状态寄存器(xPSR) (19)2.4 数据类型 (22)2.5 存储器格式 (22)2.6 指令集 (24)第3章系统控制 (26)3.1 处理器寄存器汇总 (26)3.1.1 嵌套向量中断控制器的寄存器 (26)3.1.2 内核调试寄存器 (28)3.1.3 系统调试寄存器 (28)3.1.4 调试接口的端口寄存器 (31)3.1.5 存储器保护单元的寄存器 (32)3.1.6 跟踪端口接口单元的寄存器 (32)3.1.7 嵌入式跟踪宏单元的寄存器 (33)第4章存储器映射 (35)4.1 关于存储器映射 (35)4.2 Bit-banding (37)4.2.1 直接访问别名区 (38)4.2.2 直接访问bit-band区 (38)4.3 ROM存储器表 (39)第5章异常 (40)5.1 关于异常模型 (40)5.2 异常类型 (41)5.3 异常优先级 (42)5.3.1 优先级 (43)5.3.2 优先级分组 (43)5.4 特权和堆栈 (44)5.4.1 堆栈 (44)5.4.2 特权 (44)5.5 占先 (45)5.5.1 堆栈 (45)5.6 末尾连锁(Tail-chaining) (47)5.7 迟来 (48)5.8 退出 (49)5.8.1 异常退出 (49)5.8.2 处理器从ISR中返回 (50)5.9 复位 (51)5.9.1 向量表和复位 (51)5.9.2 预期的启动顺序(boot up sequence) (52)5.10 异常的控制权转移 (54)5.11 设置多个堆栈 (54)5.12 中止(abort)模型 (56)5.12.1 硬故障 (56)5.12.2 局部故障和升级 (56)5.12.3 故障状态寄存器和故障地址寄存器 (58)5.13 激活等级(activation level) (59)5.14 流程图 (60)5.14.1 中断处理 (60)5.14.2 占先 (61)5.14.3 返回 (62)第6章时钟和复位 (64)6.1 Cortex-M3时钟 (64)6.2 Cortex-M3复位 (65)6.3 Cortex-M3复位方式 (65)6.3.1 上电复位 (65)6.3.2 系统复位 (66)6.3.3 JTAG-DP复位 (67)6.3.4 SW-DP复位 (67)6.3.5 正常工作 (67)第7章电源管理 (68)7.1 电源管理概述 (68)7.2 系统电源管理 (68)7.2.1 SLEEPING (69)7.2.2 SLEEPDEEP (69)第8章嵌套向量中断控制器 (70)8.1 NVIC概述 (70)8.2 NVIC编程器模型 (70)8.2.1 NVIC寄存器映射 (70)8.2.2 NVIC寄存器描述 (73)8.3 电平中断与脉冲中断 (97)第9章存储器保护单元 (98)9.1 MPU概述 (98)9.2 MPU编程器模型 (98)9.2.1 MPU寄存器纵览 (98)9.2.2 描述MPU寄存器 (99)9.2.3 使用重叠寄存器访问MPU (105)9.2.4 子区域 (105)9.3 MPU访问权限 (106)9.4 MPU异常中止 (107)9.5 更新MPU区域 (107)9.5.1 使用CP15等效代码更新MPU区域 (107)9.5.2 使用两个或三个字来更新MPU区域 (108)9.6 中断和更新MPU (109)第10章内核调试 (110)10.1 关于内核调试 (110)10.1.1 停止模式调试 (110)10.1.2 退出内核调试 (110)10.2 内核调试寄存器 (111)10.2.1 调试停止控制和状态寄存器 (111)10.2.2 调试内核选择寄存器 (113)10.2.3 调试内核寄存器的数据寄存器 (114)10.2.4 调试异常和监控控制寄存器 (115)10.3 内核调试访问实例 (117)10.4 在内核调试中使用应用寄存器 (117)第11章系统调试 (118)11.1 关于系统调试 (118)11.2 系统调试访问 (119)11.3 系统调试的编程模型 (120)11.4 Flash修补和断点 (121)11.4.1 FPB的编程模型 (121)11.5 数据观察点和跟踪 (125)11.5.1 DWT寄存器总结及描述 (125)11.6 仪表跟踪宏单元 (135)11.6.1 ITM寄存器总结和描述 (135)11.7 AHB访问端口 (141)11.7.1 AHB-AP处理类型 (141)11.7.2 AHB-AP寄存器总结和描述 (141)第12章调试端口 (145)12.1 关于调试端口 (145)12.2 JTAG-DP (146)12.2.1 扫描链接口 (146)12.2.2 IR扫描链和IR指令 (148)12.2.3 DR扫描链和DR寄存器 (151)12.3 SW-DP (157)12.3.1 时钟 (157)12.3.2 调试接口概述 (158)12.3.3 协议操作概述 (159)12.3.4 协议描述 (162)12.3.5 传输时序 (169)12.4 调试端口(DP)的通用特性 (170)12.4.1 Sticky标志和DP错误响应 (170)12.4.2 读和写错误 (171)12.4.3 溢出检测 (171)12.4.4 协议错误,只用于SW-DP (172)12.4.5 推动比较和推动验证操作 (172)12.5 调试端口的编程模型 (174)12.5.1 JTAG-DP寄存器 (174)12.5.2 SW-DP寄存器 (175)12.5.3 调试端口(DP)的寄存器描述 (176)第13章跟踪端口的接口单元 (186)13.1 关于跟踪端口的接口单元 (186)13.1.1 TPIU方框图 (186)13.1.2 TPIU组件 (187)13.1.3 TPIU输入和输出 (188)13.2 TPIU寄存器 (189)13.2.1 TPIU寄存器汇总 (189)13.2.2 TPIU寄存器描述 (189)第14章总线接口 (194)14.1 关于总线接口 (194)14.2 ICode总线接口 (194)14.2.1 分支状态信号 (195)14.3 DCode总线接口 (195)14.3.1 专用 (195)14.3.2 存储器属性 (196)14.4 系统接口 (196)14.4.1 不对齐访问 (196)14.4.2 Bit-band访问 (196)14.4.3 Flash修补重新映射 (196)14.4.4 独占访问(exclusive access) (196)14.4.5 存储器属性 (196)14.4.6 流水线式取指 (196)14.5 外部专用外设接口 (197)14.6 访问的对齐情况 (197)14.7 横跨区域的不对齐访问 (198)14.8 Bit-band访问 (198)14.9 写缓冲区 (199)14.10 存储器属性 (199)第15章嵌入式跟踪宏单元 (200)15.1 ETM概述 (200)15.1.1 ETM框图 (200)15.1.2 ETM资源 (201)15.2 数据跟踪 (202)15.3 ETM资源 (202)15.3.1 周期性同步(periodic synchronization) (202)15.3.2 数据和指令地址比较资源 (202)15.3.3 FIFO功能 (203)15.4 跟踪输出 (203)15.5 ETM结构 (203)15.5.1 可重新开始的指令 (203)15.5.2 异常返回 (203)15.5.3 异常跟踪 (204)15.6 ETM编程器模型 (205)15.6.1 APB接口 (205)15.6.2 ETM寄存器列表 (206)15.6.3 描述ETM寄存器 (207)第16章嵌入式跟踪宏单元的接口 (209)16.1 ETM接口概述 (209)16.2 CPU ETM接口端口描述 (209)16.3 分支状态接口 (210)第17章指令周期定时 (213)17.1 关于指令周期定时 (213)17.2 处理器的指令周期定时 (213)17.3 加载/存储(Load-store)执行时序 (216)附录A 信号描述 (218)A.1 时钟 (218)A.2 复位 (218)A.3 杂项 (218)A.4 中断接口 (219)A.5 ICode接口 (219)A.6 DCode接口 (220)A.7 系统总线接口 (221)A.8 专用外设总线接口 (221)A.9 ITM接口 (222)A.10 AHB-AP接口 (222)A.11 ETM接口 (223)A.12 测试接口 (223)附录B 术语表 (224)附录C 周立功公司相关信息 (236)前言前言部分概述了Cortex-M3 r0p0技术参考手册,包括以下内容:z关于本手册z信息反馈关于本手册本手册是关于Cortex-M3处理器的技术参考手册。
cortex-M3 片上可编程系统原理及应用教学课件第6章 基于PSoC Creator的程序设计

用C语言编写GPIO控制程序
--使用C语言指针对GPIO端口控制
6.按照前面的步骤,将设计代码编译。 7.按照前面一节所介绍的步骤,将代码下载到芯片中 ,并观察结果(由于程序执行的速度较快,为了更好的观 察结果,采用断点调试的方式)。
5.一直等待编程成功为止。
注意:由于程序执行的速度较快,建议使用断点调试 的方式,这样能更清楚的看到程序对端口的控制。
下载并调试工程
下面给出对该设计进行调试的步骤,其步骤主要包 括:
1. 在PSoC Creator 2.0主界面主菜单下,选择Debug>Debug选项,打开调试器主界面;
为了观察程序对端口的控制,在工程管理窗口,找到 main_asm.s文件。如下图所示,在该文件的cmp r1,#255;代 码上设置断点(按键盘上的“F9”按键设置断点)。
在Interrupt标签所对应的界面下,完成中断向量的设置;
在DMA标签所对应的界面下,完成DMA相关参数的设置;
汇编语言GPIO控制程序的设计
--查看和配置公共资源
在System标签所对应的界面下,完成Configuration(配置)、 Programming\Debugging(编程\调试)和Voltage Configuration(电 压配置)等相关参数的设置;
图形化的设计入口简化了配置一个特殊元件的任务。 设计者可以从元件库内选择所要求的功能,并且将其放 置在设计中。所有的参数化元件都有一个编辑器对话框 ,允许设计者根据需要对功能进行裁减(定制)。
PSoC Creator软件功能
PSoC Creator软件平台自动的配置和布线I/O到所选 择的引脚,并且为给定的应用产生应用程序接口函数 API。修改PSoC的配置是非常简单的,比如添加一个新 元件,设置它的参数和重新建立(rebuilding)工程等。
Cortex-M3汇编实践

Figure 1-21
- 13 -
Cortex-M3 汇编语言实践编程 到这里我们仍然没有解决一个问题,那就是为什么程序会跑飞了呢? CM3 的启动过程 如果想彻底解决程序跑飞的问题我们就需要好好的研究一下 CM3 在启动的时候都做了哪 些事情。 一般来讲芯片启动后都是从 0x00000000 地址处开始执行,然后直接进入系统的 RESET 异 常处理,在 RESET 处理中可能做一些堆栈初始化、寄存器复位等工作,处理完毕之后最终 跳转到 C 语言编写的 main 函数当中执行 C 语言程序。CM3 也不例外,同样是从 0x00000000 地址处开始执行程序,但是它和其他的芯片有一点差别,那就是 Cortex-M3 放 在 0x00000000 地址处的并不是 RESET 的入口地址而是其他的东西,是什么呢?请看下表 (表格出自《Cortex-M3 权威指南》英文版第 40 页):
CORTEX-M3 汇编语言实践 编程
基于 STM32F103 系列 MCU
2015-1-9
三两二锅头 duck8815@
Cortex-M3 汇编语言实践编程
写在前面:
接触 Cortex-M3 已经有一段时间了,大大小小也做了几个项目,可以说对这个系列 的片子有了一定的了解。相对于 8 位单片机来说 CM3 给我的感觉实在是强了太多,其中 比较明显的感觉是存储上的扩充,这让我在编程的时候不必为了节省几十个字节的内存而 大费周章。还记得当初用 ATmega16 写一个项目的时候,申请了一个比较大的缓冲区之后 要好多个模块共用,搞得程序结构非常乱而且还容易出错,当然这还只是一个小惊喜。更 大的优势在于 CM3 先进高效的中断机制以及它丰富的外围接口和强大的片内功能,这些 让我在开发的过程中深切的体会到 CM3 相对于 8 位单片机的优越性。而相对于高端的 ARM 芯片(ARM7、ARM9 等)来讲 CM3 又以它精巧灵活的特性让我深深的喜欢上了这个 系列的芯片,尤其是新的指令集给人感觉耳目一新,让原来繁杂的芯片初始化工作最终浓 缩到数十行汇编代码中,CM3 以它的精简和易用再一次吸引了我。 经过一段时间的学习和使用,个人觉得如果想把一款芯片用的得心应手一些必要的 理论知识还是值得花时间去学习和研究的,所以在工作之余就有了这个文档。本文主要从 汇编语言的角度去阐述和学习 Cortex-M3 的体系结构以及基本工作原理,实现对一些片内 功能的配置与应用同时还包括一些简单的外设应用。本文重点不在于深究汇编指令码,而 是通过使用汇编语言让读者从计算机的角度出发去思考问题,了解计算机的工作原理和步 骤,所以汇编指令码的细节内容在这里则不会深入讨论。
M3核心板用户指南
目录注意事项: (1)1.CORTEX-M3核心板简介 (1)1.1LM3S6965芯片 (1)1.2外设及接口 (2)1.2.1 网口 (2)1.2.2 JTAG调试口 (2)1.2.3 LED灯 (3)1.2.4 按键 (3)1.3电源模块 (3)2.CORTEX-M3核心板开发环境介绍 (3)2.1新建工程 (3)2.2工程属性设置 (6)2.2.1Target选项卡设置 (6)2.2.2C/C++选项卡设置 (7)2.2.3Debug选项卡设置 (8)2.2.4Utilities选项卡设置 (8)3.CORTEX-M3核心板测试例程 (10)3.1LED闪烁程序 (10)3.2按键程序 (11)3.3B UTTONS&LED S模块板程序 (11)3.4矩阵键盘程序 (11)3.5步进电机驱动程序 (13)3.6直流电机驱动程序 (12)3.7S ERIAL AD/DA程序 (13)3.8语音录音播放功能 (14)3.9网口测试程序 (14)3.10LCD屏幕显示程序 (15)3.11图片显示程序 (15)3.12汉字显示程序 (16)3.13示波器程序 (17)3.14迷宫游戏 (17)3.15图形库和驱动库程序 (18)注意事项:(1)M3核心板供电电压为5V;1.Cortex-M3核心板简介Cortex-M3核心板主芯片使用TI的LM3S6965芯片,外设接口主要有JTAG、网口、LED 以及按键,电源芯片使用TPS7333QD。
所有IO都有通过排针引到系统底板上。
使用时只需将核心板安装在系统底板上就可以方便的进行实验和开发。
下图是核心板框图。
1.1 LM3S6965芯片LM3S6965微控制器包括下列特性:●32位RISC性能;ARM Cortex-M3处理器核;●256KB单周期flash;●64KB单周期访问SRAM;●4个通用定时器模块(GPTM);●兼容ARM FiRM的看门狗定时器;●10/100以太网控制器;●同步串行接口(SSI);●3个完全可编程的16C550-type UART;●4路10位精度ADC通道;●2个独立集成的模拟比较器;●两个I2C模块;●3个PWM信号发生模块;●2个QEI模块;●高达0-42个GPIO,具体数目取决于配置;●另外有6个时钟复位源以及可编程时钟源控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一部分准备篇第1章实验平台简介1.1EK -LM3S811开发板简介1.2主流入门Cortex M3开发平台对比第2章实验平台硬件资源详解2.1开发板原理图详解2.2开发板使用注意事项第3章RVMDK软件入门3.1RVMDK3.80A简介3.2新建RVMDK工程3.3RVMDK使用技巧3.3.1文本美化3.3.2代码编辑技巧3.3.3其他小技巧3.3.4调试技巧第4章下载与调试4.1软件仿真4.2程序下载4.3S硬件调试第5章SYSTEM文件夹介绍5.1delay文件夹代码介绍5.1.1delay_init函数5.1.2delay_μs函数5.1.3delay_ms函数5.2sys文件夹代码介绍5.2.1I/O口的位操作实现5.2.2Stm32_Clock_Init函数5.2.3Sys_Soft_Reset函数5.2.4Sys_SleepDeep函数5.2.5JTAG_Set函数5.2.6中断管理函数5.3usart文件夹介绍5.3.1USART1_IRQHandler函数5.3.2uart_init函数第二部分实践篇第6章跑马灯实验第7章按键输入实验第8章串口通信实验第9章外部中断实验第11章窗口看门狗实验第12章定时器中断实验第13章PWM输出实验第14章12864液晶显示实验第15章TFTLCD显示实验第16章RTC实时时钟实验第17章待机唤醒实验第18章ADC实验第19章内部温度传感器实验第20章DMA实验第21章I2C实验第22章SPI实验第24章无线通信实验第25章SD卡实验第26章红外遥控实验第27章DS18B20实验第28章PS/2鼠标实验第29章汉字显示实验第30章图片显示实验第31章触控USB鼠标实验第32章制作MP3播放器实验第33章综合测试实验参考文献2009年5月18日,北京讯日前,德州仪器(TI)宣布收购市场领先的基于ARM® Cortex™-M3的32位MCU供应商Luminary Micro,从而进一步壮大了其微处理器(MCU)产品阵营。
成功收购Luminary Micro的Stellaris®系列Cortex-M3处理器将极大增强TI提供业界最完整MCU产品系列的实力。
此次收购意味着客户从现在开始即可体验Stellaris MCU丰富的创新功能,以及TI作为全球领先半导体供应商所拥有的卓越用户体验与雄厚技术实力。
Stellaris器件将有助于TI充分满足主流32位MCU的市场需求,从而使客户能够获得业界标准ARM Cortex-M3内核的通用处理性能以及Stellaris产品系列的高级通信功能,如10/100以太网MAC+PHY、CAN、USB OTG、USB主机/装置、SSI/SPI、UART、I2S以及I2C等。
此次收购的相关事项已于2009年5月14日处理完毕。
(更多详情,敬请访问:/stellarispr)TI负责高级嵌入式控制业务的副总裁Brian Crutcher指出:“通过将Luminary Micro公司Cortex-M3处理器卓越的设计体验与TI在超低功耗MSP430 MCU与高性能C2000™实时控制器方面拥有的广博专业技能完美结合,可为TI客户提供能够满足几乎所有应用领域的统一MCU来源——所有这些均可由业界最广泛的嵌入式处理与模拟产品系列进行补充。
”Stellaris系列MCU定位于要求强大控制处理与连接功能的低成本应用,如运动控制、远程监控、HV AC与楼宇控制系统、网络设备与交换机、工厂自动化、电子销售点机器、测量测试设备、医疗仪表以及娱乐设备等。
最新推出的第四代Stellaris器件——LM3S9000 Series在通用处理性能方面取得了全新突破,并实现了连接性、存储器配置以及高级运动控制的完美结合。
Luminary Micro前首席执行官、现任总经理Jim Reinhart指出:“对于我们的客户而言,今天发布的公告是一则重大新闻。
今后,客户不仅可受益于屡获殊荣的Stellaris系列产品,还能充分享受TI强大的技术与制造实力,体验足迹遍布全球、具有丰富经验的模拟与嵌入式处理技术领导者所带来的强大优势。
”Jim Reinhart将领导TI Catalog ARM MCU业务及其作为TI高级嵌入式控制(AEC)机构不可分割一部分的发展策略的实施。
Cortex-M3微处理器业务将继续由位于德克萨斯州奥斯汀(Austin, Texas)的基地运营,今后将会被命名为“TI AEC Austin”。
从通用超低功耗MSP430 MCU系列,到面向实时控制的高性能TMS320C2000™ MCU系列,再加上目前基于Cortex-M3的32位MCU,TI可提供业界最广泛的嵌入式控制解决方案。
设计人员可充分利用TI完整的软、硬件工具,丰富的第三方产品以及全方位的技术支持,加速设计的上市进程基于ARM® Cortex™-M3的四款MCU套件日前,德州仪器(TI)宣布推出四款可支持基于ARM Cortex-M3的第四代Stellaris MCU的低成本开发套件,能够在工业、消费类电子以及医疗应用等领域对高级连接与复杂控制功能的需求不断增长的情况下,充分满足对高性能集成微处理器(MCU)以及可靠配套工具与软件的需求。
最低价格为99美元的全新套件可帮助开发人员立即开展设计工作,并充分发挥最新32位Stellaris MCU的高级连接性、数据高效性以及运动控制特性等优势。
为进一步简化开发,每个套件均包含有全面的StellarisWare®外设驱动器库、图形库、USB库以及代码示例。
如欲了解更多详情,敬请访问:/stellarispr。
两款全新评估套件、一款开发套件与一款参考设计套件现已开始供货,可通过经销商进行订购。
每款套件都提供具有256K闪存、96K SRAM以及ROM内置StellarisWare软件的80 MHz Stellaris MCU,而且还提供集成以太网、USB移动(OTG)/主机/器件以及CAN。
上述套件可满足开发人员进行设计的所有需求,可在10分钟乃至更短的时间内启动开发工作。
Stellaris®LM3S9B90和LM3S9B92以太网+USB-OTG评估套件的特性与优势∙这两款评估套件提供可直接投入设计的两块电路板,包括一个电路内部调试接口电路板以及36毫米x102毫米的EK-LM3S9B90或EK-LM3S9B92评估板;∙最新80 MHz LM3S9B90 MCU为要求省电模式的应用提供了休眠模块,可延长非工作时间;∙针对要求同时存取外设与高级运动控制功能的应用,80 MHz LM3S9B92 MCU可提供8个针对运动与能量的PWM输出以及两个正交编码器输入(QEI)模块,而且还可提供最大化外设连接性能的选项;∙集成式高级连接外设包括以太网10/100、两个LED指示灯以及USB 2.0全速OTG;∙所有MCU I/O均采用可简化原型设计的标准尺寸终端排针(terminal header);∙第三方ARM工具厂商提供可简化开发的完整源代码、文档以及多种评估工具的选择;∙如欲了解更多信息或购买套件,敬请访问:/lm3s9B90evalkits-pr或/lm3s9B92evalkits-pr。
DK-LM3S9B96开发套件的特性与优势∙特性丰富的开发平台提供可简化菜单导航的3.5英寸景观型QVGA TFT彩色LCD显示屏与指轮电位计;∙ROM内置的SafeRTOS可用作标准操作系统,也可用作要求通过IEC61508或FDA510(k)认证的高度完整性应用的一部分;∙高度集成的80 MHz Stellaris LM3S9B96 MCU;∙两个外设接口(EPI)子板,一个采用8MB SDR SDRAM存储器,另一个可便捷访问所有32 EPI引脚;∙具有外部音频编解码器与接口的集成型跨芯片音响(I2S)接口支持线路输入输出、麦克风输入与耳机输出;∙MicroSD卡插槽、1 MB串行闪存、高精度3V模拟参照电压;∙第三方ARM工具厂商提供可简化开发工作的StellarisWare软件与评估工具;∙如欲了解更多详情或购买套件,敬请访问:/dk-lm3s9b96-pr。
3.5英寸景观型单板计算机智能显示参考设计套件(RDK-IDM-SBC)的特性与优势∙经过成本与外形优化设计的人机接口(HMI)触摸显示面板实例适用于嵌入式控制设备;∙高度集成的80 MHz Stellaris LM3S9B92 MCU和扩展的板级存储器(包括8MB SDRAM、1MB串行闪存、连接外部大容量存储设备的USB主机连接器,以及一个用于影像、数据与代码存储的MicroSD卡插槽);∙3.5英寸景观导向型QVGA 16位彩色LCD电阻式触摸面板显示屏(带白色LED 背光);∙串行、数字模拟连接选项包括10/100以太网RJ45插孔、USB 2.0 Type A连接器、通过终端功能块接口实现的CAN以及通过扩展排针实现的UART与I2C;∙具有功率放大器的I2S音频编解码器可驱动一个8欧姆外部扬声器;∙如欲了解更多详情或购买套件,敬请访问:/rdk-idm-sbc-pr。
TI丰富的MCU与软件产品系列TI可提供业界最丰富的嵌入式控制解决方案,从通用超低功耗MSP430 MCU到高性能实时控制TMS320C2000™ MCU,乃至最近推出的基于Cortex-M3的32位MCU,一应俱全。
设计人员可充分利用TI完整的软硬件工具、丰富的第三方产品以及全方位的技术支持,加速设计方案的上市进程。
1,LM3s811有什么优势?LM3S3xx,6xx,8xx是Stellaris里面配置最平民化的产品。
这个系列不带USB,CAN,Enet接口。
而LM3S811这颗芯片在这个系列中是比较有代表性的一款。
所以:1. LM3S811因不带高级外设,是作为入门级的比较好的一个选择。
2. 使用LM3S811开发入门或者完成设计以后,可以pin topin向下兼容LM3S6xx,3xx的软件代码。
3. 还有,性价比高。
4. 显然是我们的主推产品,我们称之为Hero Product。
5. 主推产品,性价比高,当然出货量大咯。
2,EK_LM3S811为何要设置那么多过孔?在走线时候上下两层的地应该打上均匀分布,数量适当的过孔,以减少上下层的电容效用。
3,EK_LM3S811移植μCOSII有什么好处?到ucos的官网上有现成的TI M3版本,不用移植。
(它提供的IAR版本的,MDK的没有。
)4,EK_LM3S811上的白条是液晶么?不是,是导光板。
5,请教EK-LM3S811用作调试器调试外部芯片要怎么弄?可以通过jtag口对外进行仿真。