Dependable coding for fiducial tags
一种基于离散对数问题的无证书代理签名方案
无 证 书 公 钥 密 码 ( e iet esp bi ky C rf ae s u l e ti l c
Ab t a t:To s le t e p o lms o etfc t n g me to e s rw n p o y sg a u e s h me sr c ov h r b e fc riiae ma a e n rk y e c o i r x in t r c e s,
( .c ol f cecs 2 Sh o o o ue c nea dT c n l y U T, aj g2 0 9 , h a 1 S h o o i e ; . c ol f mp t Si c n eh oo ,N S N ni 10 4 C i ) S n C r e g n n
an w erf a ls poys n tr shm ( L S i pee t .T i shm o e h e srw e e ict es rx i a e c e e C P )s rsne ti e g u d hs c e esl stek yeco v
p o lm y b n i g t a i l rv t e s wi a d n i nd as aife lt e rq r d r be b i d n wo p r a y p a e k y t a s me ie t y a lo s ts s a h e uie tl i h t i l
K e r :dic e e l g rt m r b e s c ri c tl s r x inau e s h me ; p iae k y ; i y wo ds s r t o a h p o lm ; e t aee s p o y sg t r c e s i i f rv t e s — de tt n iy
阿尔伦-布拉德利 Stratix 5700 工业 managed Ethernet 交换机说明书
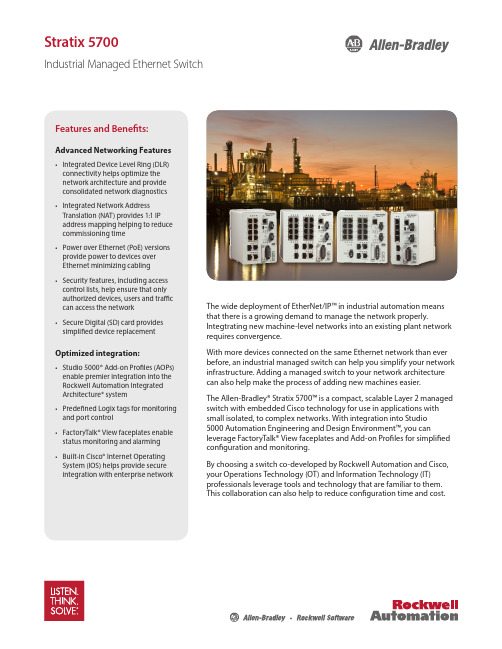
Stratix 5700Industrial Managed Ethernet SwitchThe wide deployment of EtherNet/IP™ in industrial automation means that there is a growing demand to manage the network properly.Integtrating new machine-level networks into an existing plant network requires convergence.With more devices connected on the same Ethernet network than ever before, an industrial managed switch can help you simplify your network infrastructure. Adding a managed switch to your network architecture can also help make the process of adding new machines easier. The Allen-Bradley® Stratix 5700™ is a compact, scalable Layer 2 managed switch with embedded Cisco technology for use in applications with small isolated, to complex networks. With integration into Studio 5000 Automation Engineering and Design Environment™, you canleverage FactoryTalk® View faceplates and Add-on Profiles for simplified configuration and monitoring.By choosing a switch co-developed by Rockwell Automation and Cisco, your Operations Technology (OT) and Information Technology (IT) professionals leverage tools and technology that are familiar to them. This collaboration can also help to reduce configuration time and cost.Features and Benefits:Advanced Networking Features• Integrated Device Level Ring (DLR) connectivity helps optimize the network architecture and provide consolidated network diagnostics • Integrated Network Address Translation (NAT) provides 1:1 IP address mapping helping to reduce commissioning time • Power over Ethernet (PoE) versions provide power to devices over Ethernet minimizing cabling • Security features, including access control lists, help ensure that only authorized devices, users and traffic can access the network • Secure Digital (SD) card provides simplified device replacementOptimized integration:• Studio 5000® Add-on Profiles (AOPs) enable premier integration into the Rockwell Automation Integrated Architecture® system • Predefined Logix tags for monitoring and port control • FactoryTalk® View faceplates enable status monitoring and alarming • Built-in Cisco® Internet Operating System (IOS) helps provide secure integration with enterprise networkDesigned and Developed for EtherNet/IP Automation ApplicationsNetwork Address TranslationMachine integration onto a plant network architecture can be difficult as machine builder IP-address assignments rarely match the addresses of the end-user network. Also, network IP addresses are often unknown until the machine is being installed. The Stratix 5700 with Network Address Translation (NAT) is a Layer 2 implementation that provides “wire speed” 1:1 translations ideal for automation applications where performance is critical.NAT allows for:• Simplified integration of IP-addressmapping from a set of local,machine-level IP addresses to theend user’s broader plant network• OEMs to deliver standard machinesto end users without programmingunique IP addresses• End users to more simply integratethe machines into the larger network192.168.1.4192.168.1.4MACHINE 1MACHINE 2Private Network Private NetworkSwitch Reference ChartAllen-Bradley Stratix 5700 Industrial Ethernet SwitchSwitch Selection TableFE - Fast Ethernet GE - Gigabit EthernetPublication ENET-PP005F-EN-E – April 2016Copyright ©2016 Rockwell Automation, Inc. All Rights Reserved. Printed in USA.Supersedes Publication ENET-PP005E-EN-E – March 2015EtherNet/IP is a trademark of the ODVA.Cisco is a trademark of Cisco Systems, Inc.Allen-Bradley, CompactLogix, Factory Talk, Integrated Architecture, Kinetix, LISTEN. THINK. SOLVE., Powerflex, Rockwell Automation, Rockwell Software, Stratix 5700, Studio 5000, Studio 5000 Automation Engineering and Design Environment are trademarks of Rockwell Automation, Inc.Glossary of TermsAccess Control Lists allow you to filter network traffic. This can be used to selectively block types of traffic to provide traffic flow control or provide a basic level of security for accessing your network.CIP port control and fault detection allows for port access based on Logix controller program or controller mode (idle/fault). Allows secure access to the network based on machine conditions.CIP SYNC (IEEE1588) is the ODVAimplementation of the IEEE 1588 precision time protocol. This protocol allows very high precision clock synchronization across automation devices. CIP SYNC is an enabling technology for time-critical automation tasks such as accurate alarming for post-event diagnostics, precision motion and high precision first fault detection or sequence of events.Device Level Ring (DLR) allows direct connectivity to a resilient ring network at the device level.DHCP per port allows you to assign a specific IP address to each port, confirming that the device attached to a given port will get the same IP address. This feature allows for device replacement without having to manually configure IP addresses.Encryption provides network security by encrypting administrator traffic during Telnet and SNMP sessions.EtherChannel is a port trunking technology. EtherChannel allows grouping several physical Ethernet ports to create one logical Ethernet port. Should a link fail, the EtherChannel technology will automatically redistribute traffic across the remaining links.Ethernet/IP (CIP) interface enables premier integration to the Integrated Architecture with Studio 5000 AOP , Logix tags and View Faceplates.FlexLinks provides resiliency with a quick recovery time and load balancing on a redundant star network.IGMP Snooping (Internet Group Management Protocol) constrains the flooding of multicast traffic by dynamically configuring switch ports so that multicast traffic is forwarded only to ports associated with a particular IP multicast group.* Separate SW IOS requiredKey Software FeaturesMAC ID Port Security checks the MAC ID of devices connected to the switch to determine if it is authorized. If not the device is blocked and the controller receives a warning message. This provides a method to block unauthorized access to the network.Network Address Translation (NAT) provides 1:1 translations of IP addresses from one subnet to another. Can be used to integrate machines into an existing network architecture.Port Thresholds(Storm control & Traffic Shaping)allows you to set both incoming and outgoing traffic limits. If a threshold is exceeded alarms can be set in the Logix controller to alert an operator. Power over Ethernet (PoE) provides electrical power along with data on a single Ethernet cable to end devices.QoS – Quality of Service (QoS) is the ability to provide different priority to different applications, users, or data flows, to help provide a higher level of determinism on your network.REP (Resilient Ethernet Protocol) – A ring protocol that allows switches to be connected in a ring, ring segment or nested ring segments. REP provides network resiliency across switches with a rapid recovery time ideal for industrial automation applications.Smartports provide a set of configurations to optimize port settings for common devices like automation devices, switches, routers, PCs and wireless devices. Smartports can also be customized for specific needs.SNMP Simple Network Management Protocol (SNMP) is a management protocol typically used by IT to help monitor and configure network-attached devices.Static and InterVLAN Routing bridges the gap between layer 2 and layer 3 routing providing limited static and connected routes across VLANs.STP/RSTP/MST Spanning Tree Protocol, is a feature that provides a resilient path between switches. Used for applications that requires a fault tolerant network.VLANs with Trunking is a feature that allows you to group devices with a common set of requirements into network segments. VLANs can be used to provide scalability, security and management to your network.802.1x Security is an IEEE standard for access control and authentication. It can be used to track access to network resources and helps secure the network infrastructure.。
自适应帧Aloha的RFID标签防冲突协议

自适应帧Aloha的RFID标签防冲突协议吴海锋;曾玉【摘要】When a radio frequency identification (RFID) system identifies multiple tags, tag collisions will happen.The RFID system generally applies a tag anti-collision protocol to resolve the multi-tag collisions.To reduce identified time, this paper proposes a new adaptive dynamic framed Aloha (ADFA) for RFID tag collision arbitration.Based on dynamic framed Aloha protocol, ADFA adaptively allocates each identified tag a slotnumber.During the next reading round, the tags will be identified according to the slot number, which can reduce collision and idle slots when a reader repeatedly tags.In many RFID applications where a reader may repeatedly identify tags, such as supply chain operation, objec t tracking and locating, the proposed protocols can reduce time of reidentifying tags.Furthermore, to reduce more identified time, we improve ADFA protocol and propose a tag quantity estimate with low computational complexity and an optimal frame length.The tag estimate is based on Vogt method, and can reduce computational complexity by narrowing the search range of the tag quantity.And the optimal frame length scheme can achieve maximum throughput under the condition that the slot durations are different.The theoretical computation and simulation results both show that ADFA can reduce identified time when repeatedly reading tags, and the tag estimate in the improved ADFA can lower computational complexity.In addition, the optimal frame length in theimproved ADFA can also advance system throughput.%为减少重复识别标签的时间,在动态帧时隙Aloha的RFID标签防冲突协议的基础上提出了一种自适应的动态帧时隙Aloha(adaptive dynamic framed Aloha,ADFA)的防冲突协议.在ADFA协议中,阅读器每成功识别一个标签就自适应地给该标签分配一个时隙号,该时隙号规定了标签在一次识别过程中被阅读器识别的顺序,若当前识别过程中待识别的标签与上一次识别过程中的标签相比有较多的重复,ADFA协议就可以减少冲突和空时隙,从而减少标签识别时间.另外,为进一步减少ADFA协议识别标签的时间,还对其作了改进,在改进的ADFA协议中,提出了一种低复杂度标签估计和最优帧长方案.理论分析和仿真结果均表明,ADFA协议在重复识别标签时能够减少识别时间,改进ADFA协议的标签估计方法能够减少计算复杂度,而其最优帧长方案能使系统的吞吐量得到提高.【期刊名称】《计算机研究与发展》【年(卷),期】2011(048)005【总页数】9页(P802-810)【关键词】RFID;防冲突;Aloha;自适应;标签【作者】吴海锋;曾玉【作者单位】云南民族大学电气信息工程学院,昆明,650500;云南民族大学电气信息工程学院,昆明,650500【正文语种】中文【中图分类】TP393.04;TN919.1RFID被认为是一种能可靠实现多物品识别的技术,当采用RFID阅读识别多物品时,它将同时与多个物品上的标签进行通信,由于通信的无线信道为共享信道,因此标签间会发生冲突,RFID系统一般采用防冲突的协议来解决冲突[1-2].通常的防冲突协议可分为两类,分别是树类[3-6]和 Aloha类协议[7-15].Aloha类协议在 RFID系统中得到了广泛的应用,目前13.56 MHz ISM Band Class 1[16],ISO 18000-6A[17]和 C[18],以及 EPC C1 Gen2[19]协议采用的都是Aloha类协议.在RFID的许多应用中,阅读器需要对一些物品进行重复的识别.例如,在供应链管理中,托盘或传送带上的物品在入库、盘库和出库等多个环节都需要被重复读取[9].在这种情况下,如果阅读器能够利用上次识别标签的信息,那么在下次识别同样的标签时有些冲突是可以避免的[20].Myung等人提出过两种自适应的防冲突协议:ABS和 AQS[21-22],它们在识别重复标签时取得了较好的性能,然而这两种协议均基于树类协议.目前,报道基于Aloha类的协议在识别重复标签时可以减少冲突的文献还较少.本文提出了一种自适应的动态帧时隙Aloha (adaptive dynamic framed-slotted Aloha,ADFA)的RFID标签防冲突协议,它每成功识别一个标签就给标签分配一个时隙号,该时隙号规定了标签被阅读器识别的顺序.如果在下次识别过程中,阅读器要重复识别这些标签,那么阅读器可以根据已分配的时隙号依顺序识别标签,这样标签间的冲突可以避免,因而也减少了识别时间.但是,采用ADFA协议重复识别标签时,如果有大量的新到来的标签冲突也会急剧增加.此时,为减少冲突阅读器应根据标签数来合理调整帧长,此时就需要估计标签数,这与传统帧时隙Aloha协议中的标签估计问题相同.在传统的标签数估计中,Vogt估计[11-12]的准确度较高,它在一定的标签范围内搜索最小值,当标签搜索范围较大时计算复杂度较高.针对上述问题,本文后半部分提出了一种改进的ADFA协议,在该协议中,阅读器在每个帧开始时先估计标签数,然后再调整帧长,其中,标签估计采用了一种低复杂度的Vogt估计.另外,为提高系统效率,本文在改进的ADFA协议中还规定了各种时隙所占用的时间不再相同.此时,将帧长设置为与标签数相同的传统方案[7-10]将不能达到最大系统效率.在改进的ADFA协议中,我们提出的最优帧长方案能够使系统获得最大的系统吞吐量. 图1给出了ADFA协议中阅读器操作伪代码.阅读器具有两个计数器,分别是时隙计数器(slot counter,SC)和可读时隙计数器(readable slot counter,RSC).每个帧开始时,SC均被置为0,以后每经过一个时隙就自加1,当SC超过帧长时,一个帧就结束.RSC实时记录了阅读器当前时刻已识别的标签数,识别开始时,RSC初始值为0,以后每经过一个可读时隙均会自加1.在每个时隙中,阅读器会根据接收到的标签ID信息来判断空、可读和冲突的情况,然后给标签发送相应的反馈信息.如果是可读,阅读器发送给标签的反馈信息会带有已自加1的RSC值.在识别过程中,每个帧的长度会动态变化,最初的帧长为上次识别结束后的RSC值,如果RSC值为空,那么最初的帧长就由用户自行设定.非最初的帧长为上一个帧内发生冲突时隙数目的2倍,如果一个帧结束时没有冲突时隙数,表明标签已被全部识别,整个识别过程结束.图2给出了ADFA协议中标签操作的伪代码.识别开始时,标签受阅读器磁场激活进入Ready状态,收到一个帧开始的命令后就进入Active态.每个标签具有一个标签时隙计数器(tag slot counter,TSC),每个帧开始时,TSC的初始值均为0,若标签未被识别,TSC每经过一个时隙均要自加1.每个标签还具有一个选择时隙号(selected slot number,SSN),它规定了标签在一个帧的哪一个时隙内发送其ID,只有当标签的TSC自加到等于它的SSN 时标签才能发送其ID,这样确保每个标签只能在一个帧内向阅读器发送一次ID.在一个帧开始时如果标签的SSN 大于这个帧的长度时,或者SSN为空时,它将被随机地设为0到帧长值之间的一个数;另外,由于标签的TSC只有在其被成功识别后才能停止计数,因此当其TSC>SSN时,表明该标签在当前帧内发生冲突未被识别,它的SSC在下一个帧开始时也将被随机设定.如果标签发送其ID后,就要等待阅读器的反馈信息,如果该标签接收到的反馈信息为可读,标签就被阅读器成功识别,此时的这个反馈信息还带有一个RSC值,标签把其SSN值定为这个RSC值,随后进入Quiet态,在此状态下标签在随后的帧内都不活动.如果该标签接收到的反馈信息为冲突,标签将不能被识别,它仍将处于Active态,直到这个帧结束后再返回Ready态,等待下个帧开始后重新被识别.上述标签操作中的标签状态采用ISO18000-6A[17]中的转换规则,图3给出了该状态转换图,初始时,标签处于Off态,受阅读器射频磁场激活而进入Ready态.每个帧开始时,处于Ready态的标签就进入Active态,处于Active态的标签将参与到防冲突识别,被成功识别后进入Quiet态,否则仍处于Active,直到一个帧结束后再回到Ready态.令Ai={a1,a 2,…,an}为第i个周期内阅读器要识别的n 个标签集合.Sj(Ai +1|Ai)为阅读器在第i个周期内识读标签集合A i后,在第i+1个周期内识读标签集合Ai+1时第j个帧内的可读时隙数.其中,1个周期定义为阅读器从开始识别标签的第1个帧到所有标签均被识别完的最后1个帧所占用的时间.在ADFA协议中,阅读器每成功识别一个标签,RSC就自加1,因此RSC实时记录了阅读器在当前时隙时已识别的标签数.由于标签一旦被识别,其SSC就被当前的阅读器RSC所赋值,因此当识别结束后,所有被识别过的标签的SSC将按0,1,2,…依次排列.又由于SSC表明了标签在何时隙内被识别,因此,如果在下次识别过程中,没有新的标签到来也没有标签离去,即Ai+1=Ai,那么识别将在一个帧内完成,且不存在空时隙和冲突时隙而只有可读时隙,因此,ADFA协议在第i+1个周期的首个帧内的可读时隙数为如果在第i+1个周期内有标签离去,即Ai+1=Ai-B,其中B={a 1,a 2,…,a u}为i+1个周期内离去的标签集合,那么识别将存在u个空时隙,但是不存在冲突时隙,而且识别过程也将在一个帧内完成.因此有:如果在第i+1个周期内有新的标签到来,即Ai+1=Ai+C,其中C={c1,c 2,…,cv}为第i+1个周期内新到来的标签集合.由于这些标签的SSC可能和原有的标签重复,因此新到来的标签会与原有标签发生冲突,此时的标签识别不能仅在一个帧内完成,首个帧内的可读时隙数将与新到来的标签的SSC分布有关.考虑可读时隙数最少的一种情况,新到来的标签的SSC均不相同且与原有标签的SSC都有重复,此时的识别存在v个冲突时隙,因此有:如果在第i+1个周期内既有标签离去也有新的标签到来,即Ai+1=Ai-B+C,也考虑可读时隙数最少的一种情况,新到来的标签的SSC均不相同且与未离去的标签的SSC都有重复,由式(2)和式(3)可得:由于在ADFA协议中,空、可读和冲突时隙所占用的时间均相同,因此系统的吞吐量可以表示为[7-15]由式(6)可知,系统的吞吐量其实与离去标签数u和新到来的标签数v有关,当u和v较小时,ADFA能够得到较大的系统吞吐量.式(6)表明,当离去标签和新到来的标签较少时系统效率较高.特别地,如果标签无任何变化,系统吞吐量能够达到最大值,此时将无冲突和空时隙.按照ADFA协议,冲突的标签将在下一个帧内继续被识别,而下一个帧的长度将是首个帧内冲突时隙数的2倍.然而,当冲突时隙内的冲突标签数超过2个时,把帧长确定为冲突时隙数的2倍会远小于待识别的标签数,这样又会造成过多的冲突时隙,从而导致系统效率降低.因此要解决该问题,首先就需要准确估计标签,然后再根据标签设定最优的帧长.设在第i+1个周期的第j个帧内待识别的标签数为n,由于标签的SSN在0到信息帧的时隙数L之间随机分配,那么帧中的每个时隙内有r个标签应答的概率为[7-15]由于在一个帧内同时有r个标签应答的时隙数的数学期望可以表示为E(cr)=LPr,因此,一个信息帧内平均的空时隙数、可读时隙数和冲突时隙数分别为:其中,N为系统所能读取到的最大标签数.式(9)的估计要求在n~的取值范围内找到极值,因此需要在集合Ω中作N-c1+2cκ次计算.下面我们通过减小的取值范围减少计算次数.若把一个帧长内观测到的空时隙数c0去代替其均值a0(L,n),那么由(8a),有[13]:由于式(11)的估计只利用了一个帧内发生的空时隙数信息,得到的估计n-并不准确,因此并不能把该值作为最后的标签估计值.把式(11)代入式(8b)和式(8c),我们有:在ADFA协议中,当标签的TSC=SSN时,标签就向阅读器发送其ID,阅读器根据接收到的ID情况,将一个时隙分为空、可读和冲突时隙.在这种情况下,3个时隙的占用时间实际是相同的.然而,为了提高系统利用率,我们可以减少空和冲突时隙的占用时间.比如,在ISO18000-6C[18]和 EPC C1 Gen2[19]中,标签先向阅读器发送16 b随机码RN16,若阅读器没有接收到任何信息,则提前终止时隙;若正确接收到,标签再发送64 b EPC数据;若发生冲突,则不再发送EPC.因此,该系统的空时隙时间最短,其次是冲突时隙,可读时隙的时间最长.在改进的ADFA协议中,我们规定标签先向阅读器发送签名信息,在可读时隙中,阅读器将正确接收到标签的签名信息,然后给标签发送ACK,标签再发送其ID数据;对于冲突时隙,阅读器接收到不正确的签名信息时时隙终止,标签不再发送其ID;对于空时隙,阅读器收不到任何签名信息,则提前终止时隙.1)标签估计2)系统吞吐量在动态帧时隙Aloha协议中,若帧长L相比于标签数n过长,则空时隙过多,相反,则冲突时隙又过多,这均会导致标签识别效率降低,把L=n被认为是能取得最大的系统利用率[7-10].求式(21)中 P s关于L的导数,把L=n代入,可得:式(25)表明只有在空时隙和冲突时隙占用时间相同时,L=n才能使系统达到最大的吞吐量.然而,在改进的ADFA协议中,空时隙占用时间小于冲突时隙,而冲突时隙时间又小于可读时隙,由式(25)可知α<β<1,因此L=n并不能使系统达到最大吞吐量.式(26)表明若系统的空时隙占用时间小于冲突时隙,冲突时隙占用时间又小于可读时隙时,系统的最大系统吞吐量可以得到提高.其实,当帧长等于标签数,即k=1时,将其代入式(23),可知>=1/e=0.368,这表明,空时隙小于冲突时隙且冲突时隙又小于可读时隙,此时的最大吞吐量超过3种时隙时间相同下的吞吐量极值,即0.368.本节用计算机仿真的实验结果测试ADFA协议的性能,计算机仿真采用蒙特卡洛方法,所有结果由独立做500次实验平均得到.在本节中,我们测试ADFA协议和改进的ADFA协议在标签发生变化时的识读时间,各实验结果的帧长均为L=64.图4给出了动态帧时隙Aloha协议,本文的ADFA协议以及改进的ADFA协议在一个周期内识读标签所需要的时隙数T随标签变化率Vb变化的曲线图,标签变化率Vb定义为其中,Q(X)表示为标签集合X的标签数量,Q(Ai)设定为64.需要说明的是动态帧时隙Aloha协议采用文献[8,11-12,14-15,17]的协议机制:在每一个帧开始时,先用Vogt方法估计标签,然后该帧的帧长就等于估计的标签减去上一个帧中成功的时隙数,当一个帧中不存冲突时隙,本次标签识别结束.由图4可知,无论V b怎样变化,动态帧时隙Aloha协议的T将基本维持不变;而ADFA协议和改进型的ADFA协议的T曲线将随着V b的减小而逐渐远离动态帧时隙Aloha协议.图5给出了动态帧时隙Aloha协议、ADFA协议以及改进的ADFA协议在一个周期内识读标签所需要的时隙数T随标签到达率V a变化的曲线图,其中,标签到达率V a定义为在式(28)中,Q(Ai)也设定为64.式(28)规定当V a<0时,到达率表示为离开标签数量的变化率.由图5可知,当V a≤0时,ADFA和改进的ADFA协议识读标签所需的时隙数T将是恒定值;当-100<V a≤100时,ADFA 和改进的ADFA协议的T均不会超过动态帧时隙Aloha协议的;当V a≥200时,动态帧时隙Aloha协议和改进的ADFA协议的T小于ADFA协议.在本节中,我们测试ADFA和改进的ADFA协议中标签估计的性能,各实验结果中的帧长均为L=128.图6给出了下限值法[9,11-12]、Schoute估计法[7,9-10]、空时隙数法[13]、Vogt估计[11-12]和本文的低复杂度的Vogt估计(VLCC)的相对误差随标签数n变化的曲线图.其中,相对误差ε由式(29)给出:图6的下限值法估计的标签数为冲突时隙数的2倍,本文的ADFA协议采用该方法.Schoute估计法估计的标签数为冲突时隙数的2.39倍,空时隙法采用文献[13]的方法,其估计的标签数由式(11)确定.Vogt估计和本文的VLCC估计分别为动态帧时隙Aloha和改进的ADFA协议中的估计方法.图6中的Vogt估计和本文的VLCC估计具有完全相同的曲线,其相对误差均未超过4%,而剩余的3种方法均在4%以上.特别地,下限值法和Schoute估计的估计误差随着标签数的增大也急速增大.图7给出了Vogt估计和VLCC估计的计算复杂度曲线,其中的计算复杂度由表1给出.VLCC与Vogt估计相比,计算复杂度减小了300以上.在本节中,我们测试改进的ADFA协议中的帧长方案,各实验结果中的标签数均固定为n=100,各时隙的占用时间以及α和β由表2确定.在本节的实验中,我们先作出在4种不同的α和β下系统吞吐量随帧长变化的曲线.这4条曲线所能达到的最大吞吐量从大到小排列大约分别为0.8,0.7,0.6和0.4.然后从作图中,我们可得到这4条曲线的吞吐量从大到小排列分别在标签数为100,170,230和100左右时达到最大,把这些标签数值代入式(24)后得到的k*值分别为1.0,1.7,2.3和1.0.此后我们给出图8的结果.图8给出了在不同帧长下平均每个标签识别时间随标签数变化的曲线,其中平均每个标签识别时间t-定义为识别所有标签的过程共需要I个帧,t0,t1和tκ分别取50,200和400μs,相应地α=0.125,β=0.5.从图8可以看出L=1.7n时标签的识别时间最少,大约在550~555μs之间,而其他3种曲线大约在565~595μs之间.由于通过理论计算曲线可以得出,当α=0.125,β=0.5时,系统吞吐量在k=1.7时达到最大,因此图8反映了使吞吐量达到最大时的帧长值能够保证最少的标签识别时间.本文在动态帧时隙Aloha的基础上提出了一种ADFA协议,而且,为了改善标签估计性能和系统效率,本文还提出了一种改进的ADFA协议,通过理论分析及仿真结果,我们得到以下结论:在重复识读标签时,若标签没发生变化,ADFA和改进的ADFA协议识读标签时将不存在空时隙和冲突时隙,其识读时间要小于动态帧时隙Aloha协议;若标签有变化,则随标签变化的减小,ADFA和改进的ADFA协议的识读时间也将减小,而动态帧时隙Aloha协议的识读时间将不会变化;若新到来的标签增加,冲突的标签也会增加,此时,改进的ADFA协议和动态帧时隙Aloha协议的识读时间要小于ADFA协议.对于标签估计,ADFA协议的下限值法的估计误差要大于动态帧时隙Aloha协议中的Vogt估计和改进的ADFA协议中的低复杂度Vogt估计,其中,低复杂度的Vogt估计的计算复杂度要小于Vogt估计.最后,在改进的ADFA协议中,我们设定空时隙的占用时间小于冲突时隙,且冲突时隙的占用时间小于可读时隙,此时的系统吞吐量要大于这3个时隙的占用时间均相同的系统吞吐量.在这种时隙条件下,改进的ADFA协议中的帧长方案达到的最大吞吐量要大于把帧长定为标签数所能达到的最大吞吐量,而且改进的ADFA协议中的帧长方案识别标签的时间也较少.Zeng Yu,born in 1981.Received the MSc degree in electrical engineering from Yunnan University,Kunming,China,in 2006.She is currently an assistant professor at Department of Information Engineering at Yunnan University of Nationalities.Her main research interests include wireless network and mobile communications.【相关文献】[1] Finkenzeller K. RFID Handbook: Radio-Frequency Identification Fundamentals and Applications[M].2nd ed.New York:John Wiley and Sons,2003:1-100[2] Ding Zhenhua,Li Jintao,Feng Bo.Research on hash-based RFID security authentication protocol [J]. Journal of Computer Research and Development,2009,46(4):583-592(in Chinese)(丁振华,李锦涛,冯波.基于Hash函数的RFID安全认证协议研究[J].计算机研究与发展,2009,46(4):583-592)[3] Capetanakis J I. Tree algorithms for packet broadcast channels[J].IEEE Trans on Information Theory,1979,25(5):505-515[4] Hush D R,Wood C.Analysis of tree algorithm for RFID arbitration [C]//Proc of IEEE Int Symp on Information Theory.Piscataway,NJ:IEEE,1998:107[5] Law C,Lee K,Siu K S.Efficient memoryless protocol for tag identification[C]//Proc of the 4th ACM Int Workshop on Discrete Algorithms and Methods for Mobile Computing and Communication.New York:ACM,2000:75-84[6] Feng Bo,Li Jintao,Zheng Weimin.A novel anti-collision algorithm for tag identification in RFID systems[J].Acta Automatica Sinica,2008,34(6):632-638(in Chinese)(冯波,李锦涛,郑为民.一种新的RFID标签识别防冲突算法[J].自动化学报,2008,34(6):632-638)[7] Schoute F C.Dynamic frame length aloha[J].IEEE Trans on Communications,1983,Com-31(4):565-568[8] Chen W T.An accurate tag estimate method for improving the performance of an RFID anticollision algorithm based on dynamic frame length ALOHA [J].IEEE Trans on Automation Science and Engineering,2008,6(1):1-7[9] Floerkemeier C.Bayesian transmission strategy for framed ALOHA based RFID protocols[C]//Proc of IEEE Int Conf on RFID.Piscataway,NJ:IEEE,2007:228-235 [10] Cha J R,Kim J H.Novel anti-collision algorithms for fast object identification in RFID system[C]//Proc of Int Conf on Parallel and Distributed SystemsComputing.Piscataway,NJ:IEEE,2005:63-67[11] Vogt H.Multiple object identification with passive RFID tags[C]//Proc of IEEE Int Conf on Systems,Man,and Cybernetics.Piscataway,NJ:IEEE,2002:1-6[12] Wu Haifeng,Zeng Yu.Tag estimate and fame length for dynamic frame slotted ALOHA anti-collision RFID system[J].Acta Automatica Sinica,2010,36(4):620-624 (in Chinese)(吴海锋,曾玉.RFID动态帧时隙ALOHA防冲突中的标签估计和帧长确定[J].自动化学报,2010,36(4):620-624)[13] Khandelwal G,Yener A,Lee K,et al.ASAP:A MAC protocol for dense and time constrained RFID systems[C]//Proc of IEEE Int Conf on Communications.Piscataway,NJ:IEEE,2006:4028-4033[14] Lee S R,Joo S D,Lee C W.An enhanced dynamic framed ALOHA algorithm for RFID tag identification[C]//Proc of Int Conf on Mobile and Ubiquitous Systems:Networking and Services.Piscataway,NJ:IEEE,2005:1-6[15] Wu Weizhen,Huang Yunying,Guo Dong.Study of slotted Aloha based anti-collision algorithm in RFID and its system implementation[J].China Integrated Circuit,2008,17(4):89-94(in Chinese)(吴伟贞,黄云鹰,郭栋.基于时隙ALOHA的RFID防冲突算法及其系统实现方案的分析研究[J].中国集成电路,2008,17(4):89-94)[16] Auto-ID Center.13.56 MHz ISM Band Class 1 Radio Frequency Identification Tag Interface Specification:Recommended Standard,Version 1.0.0[R].Massachusetts:Auto-ID Center,2003[17] ISo International Standard Committee. Information technology-radio frequency identification (RFID)for item management—Part 6: Parameters for air interface communications at 860 MHz to 960 MHz[S].New York:International Standard ISO/IEC,2004[18] Information Technology-Radio Frequency Identification(RFID)for Item Management—Part 6:Parameters for Air Interface Communications at 860MHz to 960 MHz,Amendment1:Extension with Type C and Update of Types A and B [S].New York:Organization for International Standard ISO/IEC,2006[19] EPCglobal Inc.EPC radio-frequency identification protocols class-1 generation-2 UHF RFID protocol for communications at 860 MHz to 960 MHz version 1.1.0 draft1 [S].New York:Organization for EPCglobal Standard,2005[20] Lai Y C,Lin C C.A pair-resolution blocking algorithm on adaptive binary splitting for RFID tag identification [J].IEEE Communications Letters,2008,12(6):432-434 [21] Myung J,Lee W,Shih T K.An adaptive memoryless protocol for RFID tag collision arbitration[J].IEEE Trans on Multimedia,2006,8(5):1096-1101[22] Myung J,Lee W,Srivastava W,et al.Tag-splitting:Adaptive collision arbitration protocols for RFID tag identification[J].IEEE Trans on Parallel and Distributed Systems,2007,18(6):763-775。
一种基于节点采样的包标记追踪方案

1 传统概 率包 标记方案存在 的不足
概率 包标记 ( rb is cPc e Makn ,P 作为 一 P a l t ak t ri P M) o b i i g 种有 效的 D o 攻 击追踪技术 , 有无需 IP干预 , 免高 昂 DS 具 S 避 的管理开销 , 不产生过高 的 网络负 载 , 持事后追 踪等 优点 , 支
Pa k t m a k n c e e f r I t a e c s d o n de s m p i c e r i g s h m o P r c ba k ba e n o a lng
JE S e S I h 。 UN ec a g L —h n
种基 于节 点 采样 的包 标 记 追踪 方 案
揭 摄 , 乐昌 孙
( 解放 军 电子 工程 学 院 网络 工程 系, 安徽 合 肥 2o 3 ) 3 07
(i h 19 @ 13 c m j se 9 6 6 .o ) e
摘 要: 概率 包标记 ( P 是一种有效的 I P M) P追踪技术 , 但传统方案基于不现实的假设 , 存在很 多 不足 , 影响 了实 用性 。基 于合理 的假 设条 件 改进 了高级 标 记 方案 ( MS , 用可 调 节 的标 记 概 率 , A )使 根
更 隐蔽更具 价值 的 目的 , 不 是容 易 暴 露 的 D o 而 D S攻 击 ; 3 现在 已有很多工具可 以获 取上游 网络 拓朴 , 朗讯 贝尔实 ) 如 验室基 于 t crue的工具 和 C I A的 S t r re t a o AD i e k t 工具 , 它们 每 天可 以获取 1 0万个与受 害者相 连的 拓扑 , 而且 短期 内 , 这些 拓扑不会 显著变动。 以 & 方 案为 基础 , 出改进思 路 : ) MS方 案假设路 MS 提 1A 径 上的路由器均参与标记 追踪 , 以 固定标记 概率 可重复 地 并
气泡混合轻质土使用规程
目次1总则 (3)2术语和符号 (4)2.1 术语 (4)2.2 符号 (5)3材料及性能 (6)3.1 原材料 (6)3.2 性能 (6)4设计 (8)4.1 一般规定 (8)4.2 性能设计 (8)4.3 结构设计 (9)4.4 附属工程设计 (10)4.5 设计计算 (10)5配合比 (13)5.1 一般规定 (13)5.2 配合比计算 (13)5.3 配合比试配 (14)5.4 配合比调整 (14)6工程施工 (15)6.1 浇筑准备 (15)6.2 浇筑 (15)6.3 附属工程施工 (15)6.4 养护 (16)7质量检验与验收 (17)7.1 一般规定 (17)7.2 质量检验 (17)7.3 质量验收 (18)附录A 发泡剂性能试验 (20)附录B 湿容重试验 (22)附录C 适应性试验 (22)附录D 流动度试验 (24)附录E 干容重、饱水容重试验 (25)附录F 抗压强度、饱水抗压强度试验 (27)附录G 工程质量检验验收用表 (28)本规程用词说明 (35)引用标准名录 (36)条文说明 (37)Contents1.General provisions (3)2.Terms and symbols (4)2.1 Terms (4)2.2 Symbols (5)3. Materials and properties (6)3.1 Materials (6)3.2 properties (6)4. Design (8)4.1 General provisions (8)4.2 Performance design (8)4.3 Structure design (9)4.4 Subsidiary engineering design (9)4.5 Design calculation (10)5. Mix proportion (13)5.1 General provisions (13)5.2 Mix proportion calculation (13)5.3 Mix proportion trial mix (14)5.4 Mix proportion adjustment (14)6. Engineering construction (15)6.1 Construction preparation (15)6.2 Pouring .............................................................. .. (15)6.3 Subsidiary engineering construction (16)6.4 Maintenance (17)7 Quality inspection and acceptance (18)7.1 General provisions (18)7.2 Quality evaluate (18)7.3 Quality acceptance (19)Appendix A Test of foaming agent performance (20)Appendix B Wet density test (22)Appendix C Adaptability test (23)Appendix D Flow value test.................................................................................. .. (24)Appendix E Air-dry density and saturated density test (25)Appendix F Compressive strength and saturated compressive strength test (27)Appendix G Table of evaluate and acceptance for quality (28)Explanation of Wording in this code (35)Normative standard (36)Descriptive provision (37)1总则1.0.1为规范气泡混合轻质土的设计、施工,统一质量检验标准,保证气泡混合轻质土填筑工程安全适用、技术先进、经济合理,制订本规程。
否定选择算法中一种改进的检测器集生成机制
i h sbetrpef r nc . t a te ro ma e Ke r y wo ds: ne a ie s lc in ag rt ; b u a ie g tv e e to l o i hm o nd r d lmm a;d t co ; d tc in r t y e e tr ee to a e
d i1 .9 9 ji n 10 — 9 .0 1 0 .3 o:0 3 6 /.s .0 13 5 2 1 . 10 8 s 6
Bo n a y a r e e t r g n r to c a im f n g t e s l c i n a g rt m u d r — wa e d t c o e e a i n me h n s o e a i e e to l o i v h
实验 结果表 明 , 本算 法检 测 率较 高 , 尤其 可 以有 效检 测到 处 于 自 与非 自体边 界处 的点 , 有一 定 的优 越性 。 体 具 关键 词 :否定 选择 算法 ;边界 困境 ;检 测 器 ;检 测率
新一代互联网的定位符与标识符分离方案

(i r ue s beD ) 术和 域的层 次结构 设计 I /o dsi tdHaht l, HT技 tb a D L c映射 系统; 用分层 聚合 方 法设计路 由体 系结构 , 采 并定 义定位符
CHEN i c,Scu n nv r t C l g mptr ce e i a i sy h n d 0 5 h a l oC n h U e i ,C eg u 1 6 ,C i ) 6 0 n
A sr c:T l n eiet e I lctr(o )sprt nfrh t ent r, a eouini peetdta eina b tat oi e th ni r( mp me t d f i D)/ a o o L c e aao ef u e k slt rsne t s i ot u r wo r o s h d g
0 引 言
It t I 址 具 有 两 个 功 能 , 一 、 为通 信 主 机 的 ne me 中 P地 第 作 标 识 符 ( et e,D , 二 、 为 网络 传 输 的 定 位 符 ( ctr i ni r I ) 第 d f i 作 1a , o o L c。 标 识 符 是传 输 层 及 上 层 中 唯 一 标 识 主 机 的符 号 ,定 位 o) 符 是 网 络 层 中用 于 包 的转 发 和 定 位 主 机 位 置 的位 串 。 是 I 正 P 地 址 的 双 重 身 份 , 着 Itrc的 发 展 出现 了 许 多 问题 “ 例 如 随 ne t a , 不支持移 动、 多个 家 乡 、 址 重 新 分 配 、 地 安全 性 、 量 工 程 及 大 流 规 模 路 由等 , 决 这 些 问 题 大 都 需 要 主 机 定 位 符 可 变 , 此 解 因
rna-蛋白质相互作用预测及描述符设计
RNA-蛋白相互作用预测是指预测RNA分子和蛋白分子之间的相互作用。
这种相互作用可以通过多种方法来预测,其中一种常用的方法是使用生物信息学工具和数据库。
有多种预测RNA-蛋白相互作用的方法,其中一些常用的方法如下:基于序列的方法:这类方法使用RNA和蛋白质序列的相似性来预测相互作用。
基于结构的方法:这类方法使用RNA和蛋白质结构的相似性来预测相互作用。
基于功能的方法:这类方法使用RNA和蛋白质功能的相似性来预测相互作用。
描述符(descriptors)。
描述符是用来表示RNA或蛋白质分子特征的数值,它可以用来描述分子的结构、序列、功能等特征。
这些描述符可以用来预测RNA-蛋白相互作用。
常用的RNA-蛋白相互作用预测描述符包括RNA结构、蛋白质结构、RNA序列、蛋白质序列、RNA功能、蛋白质功能等。
这些描述符可以用来预测RNA-蛋白相互作用。
需要注意的是,RNA-蛋白相互作用预测是一个复杂的问题,目前尚没有一种完美的方法可以预测所有RNA-蛋白相互作用。
不同的预测方法有不同的优缺点,需要根据具体应用场景选择合适的方法进行预测。
在使用RNA-蛋白相互作用预测描述符进行预测时,通常需要使用机器学习算法来建立模型。
这些算法通常包括逻辑回归、支持向量机、随机森林等。
这些算法可以利用大量的训练数据来学习RNA-蛋白相互作用的特征,并建立模型来预测新的RNA-蛋白相互作用。
需要注意的是,RNA-蛋白相互作用预测的准确性受到训练数据的质量和数量的影响。
因此,在使用机器学习算法进行预测时,需要使用高质量和大量的训练数据来建立模型。
总结而言,RNA-蛋白相互作用预测是一个复杂的问题,需要综合运用生物信息学,机器学习等技术来解决。
这种预测可以用来提高对RNA-蛋白相互作用的理解,为生物医学研究和药物开发提供新的思路。
在RNA-蛋白相互作用预测中,RNA-蛋白相互作用预测描述符是非常重要的。
预测描述符可以用来描述RNA和蛋白质的特征,并且可以用来预测RNA-蛋白相互作用。
LTE_3GPP_36.213-860(中文版)
Internet
Copyright Notification No part may be reproduced except as authorized by written permission. The copyright and the foregoing restriction extend to reproduction in all media.
Cell search ................................................................................................................................................... 8 Timing synchronisation ................................................................................................................................ 8 Radio link monitoring ............................................................................................................................. 8 Inter-cell synchronisation ........................................................................................................................ 8 Transmission timing adjustments ............................................................................................................ 8
基于响应分组的仲裁器PUF偏置控制方法

现代电子技术Modern Electronics Technique2024年5月1日第47卷第9期May 2024Vol. 47 No. 90 引 言基于静态随机存取存储器(SRAM )的现场可编程门阵列(FPGA )通常缺少用于存储密钥的片上非易失性存储器,因此难以保证应用的安全性。
而物理不可克隆函数(PUF )技术具有从芯片制造过程中不可控的工艺偏差中提取硬件指纹的能力,可为FPGA 提供轻量级安全解决方案[1]。
典型的PUF 主要包括基于存储器的SRAM PUF [2]、蝶形PUF [3]和基于延时的环形振荡器PUF [4]、仲裁器PUF [5]等。
其中,仲裁器PUF 能够以较少的硬件开销产生大量响应,是最具应用潜力的轻量级PUF 之一。
仲裁器PUF 根据两个可配置路径之间的延迟差产生一个响应位。
其设计基本原则是对两条延时路径进行对称布局和布线,保证两条路径具有相同的标称延迟,使响应完全依赖于工艺偏差引入的随机延迟变化。
基于响应分组的仲裁器PUF 偏置控制方法刘海龙, 严清虎, 何佳洛(湖北大学 人工智能学院, 湖北 武汉 430062)摘 要: 针对在现场可编程门阵列(FPGA )平台上实现的仲裁器物理不可克隆函数(PUF )响应唯一性和稳定性较差的问题,提出一种基于响应分组的仲裁器PUF 偏置控制方法。
在基于可编程延时线(PDL )的仲裁器PUF 电路中插入多路选择器(MUX )粗调开关单元和PDL 微调开关单元,使路径延时可受调节激励控制。
通过实时改变调节激励,控制每个响应分组中有效响应的汉明重量达到50%可提高响应唯一性;通过偏置控制筛选出延时差异较大的响应可提高响应稳定性。
在Xilinx XC7Z020 FPGA 器件上实现带偏置控制功能的64级仲裁器PUF 电路,仅消耗143个查找表(LUT )和425个触发器(DFF )资源。
在温度为-20~80 ℃、供电电压0.9~1.1 V 范围内,该仲裁器PUF 响应唯一性为49.89%,有效响应稳定性可达到100%。
PCV-2V压力释放阀,直接操作手动可调说明书

w e e n g i n e e r y o u r p r o g r e s sTable of Contents1 Product Details .....................................................................................................................................................................................2 1.1 Application ............................................................................................................................................................................................. 2 1.2 Recommended Installation .................................................................................................................................................................... 2 2 Function ................................................................................................................................................................................................ 2 2.1 Features ................................................................................................................................................................................................. 23 Technical Data ...................................................................................................................................................................................... 34 Ordering Information ........................................................................................................................................................................... 3 4.1 Type Code ............................................................................................................................................................................................. 3 4.2Versions currently available (3)5 Description of Characterisics in Accordance with Type Code ........................................................................................................ 4 5.1 Characteristic 1: Variant DSU ................................................................................................................................................................ 4 5.2 Characteristic 2: Port / Case: Variant CA - Cartridge ............................................................................................................................. 4 5.3 Characteristic 3: input flow rate .............................................................................................................................................................. 4 5.4 Characteristic 4: Max.permissible pressure ........................................................................................................................................... 4 5.5 Characteristic 5: Activation / Setting ...................................................................................................................................................... 4 5.6 Characteristic 6: Stepped cavity 8.00239 (corresponds to Bucher UVP- 4) ......................................................................................... 4 Das vorgesteuerte Druckbegrenzungsventil ist ein Cartridgebauteil und wird in eine Stufenbohrung entsprechend nebenstehender Zeichnung eingeschraubt. ..................................................................................................................................................................................................... 4 5.7 Characteristic 7: Seal ............................................................................................................................................................................. 4 6 Installation ............................................................................................................................................................................................ 5 6.1 General information ............................................................................................................................................................................... 5 6.2 Connection Recommendations .............................................................................................................................................................. 5 6.3 Installation - installation space ............................................................................................................................................................... 5 7 Notes, Standards and Safety Instructions ......................................................................................................................................... 5 7.1 General Instructions ............................................................................................................................................................................... 5 7.2 Standards ............................................................................................................................................................................................... 58 Zubehör .................................................................................................................................................................................................5w e e n g i n e e r y o u r p r o g r e s s1The pressure valve is designed as cartridge valve. It is a direct operated valve for flow rates up to 10 l / min, which can be adjusted manually. The adjustment can be protected by a cap. The components are designed robust. The valve can be charged up to 500 bar and is delivered at a certain pressure.1.1 ApplicationThe pressure valve is used to protect high volume lift cylinders in truck cranes. It should avoid excessive pressure increase in unmoving cylin-ders due to warming (“sushine valve”).1.2 Recommended Installation2 FunctionThe pressure valve operates as a direct acting seat valve. The pressure can be set using an adjusting screw. The screw is locked after adjustment with a backup sealing nut and can be protected by a cap.2.1 Features▪ Cartridge type▪ Small installation space ▪ Robust construction▪Stepped cavity (corresponds to Bucher UVP-4) ▪Seat valve, leakage freeP – protected port T - tankw e e n g i n e e r y o u r p r o g r e s s3 Technical Data4 4.1 Type CodeXXX – fest vorgegebene Merkmale XXX – vom Kunden wählbare Merkmale4.2 Versions currently availableThe versions listed below are available as standard. Further versions as part of the options given on the type code can be configured upon request.designationtype codepart nr.PRV –DSU –CA -10LPM -500BAR –MAN230BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN230 –239 -N 412.072.451.9 PRV –DSU –CA -10LPM -500BAR –MAN235BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN235 –239 -N 412.072.430.9 PRV –DSU –CA -10LPM -500BAR –MAN290BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN290 –239 -N 412.072.433.9 PRV –DSU –CA -10LPM -500BAR –MAN340BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN340 –239 -N 412.072.431.9 PRV –DSU –CA -10LPM -500BAR –MAN420BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN420 –239 -N 412.072.432.9CriteriaUnit Value Installation position any Weightkg 0,1Surface protectiveZinc coated Maximum input pressure (P) bar 550Adjustable pressurebar 100 - 500 Maximum Tankpressure (T) bar 8 Maximum input flow rate (P) l/min 10Hydraulic fluidMineral oil (HL, HLP) conforming with DIN 51524, other fluids upon re-Hydraulic fluid pressure range °C -25 bis +80 Ambient temperature °C < +50 Viscosity rangemm2/s 2,8 - 500Contamination gradeFiltering conforming with NAS 1638, class 9, with minimum retentionPRVDSUCA10500239N000102030405060700 Product group Pressure relief valves PRV 01 Variant manual adjustable DSU 02 Port / Case Cartridgeventil CA 03 Input flow rate Qmax.10 l/min 1004 Max.permissible pressure Pmax.. 500bar50005 Activation Man ually adjustable 100-500barMAN100 06 Stepped cavity WESSEL-Patrone 8.00239 (stepped cavity) 239 07 Seal NBR, temperatur range -25°C bis +80°CNw e e n g i n e e r y o u r p r o g r e s s5 5.1 Characteristic 1: Variant DSUAdjustable pressure relief valve5.2 Characteristic 2: Port / Case: Variant CA - CartridgeAs variant CA, the valve is delivered as a cartridge valve. The Cavity has to be designed according to characteristic 6 (stepped cavity)5.3 Characteristic 3: input flow rateRecommended maximum flow rate of 10 l/min.5.4 Characteristic 4: Max.permissible pressureMaximum permissible pressure is 500bar (adjustable range100 - 500bar)5.5 Characteristic 5: Activation / SettingThe valve can be adjusted with a set screw. For this purpose, the protective cap must be removed and the counter nut undone.5.6 Characteristic 6: Stepped cavity 8.00239 (corresponds to Bucher UVP- 4)Das vorgesteuerte Druckbegrenzungsventil ist ein Cartridgebauteilund wird in eine Stufenbohrung entsprechend nebenstehender Zeichnung eingeschraubt.5.7 Characteristic 7: SealNBR, temperature range -25°C bis +80°Cw e e n g i n e e r y o u r p r o g r e s s6 Installation6.1 General information▪ Observe all installation and safety information of the construction machine / attachment tools manufacturer. ▪ Only technically permitted changes are to be made on the construction machine. ▪ The user has to ensure that the device is suitable for the respective application. ▪ Application exclusively for the range of application specified by the manufacturer. ▪ Before installation or de-installation, the hydraulic system is to be depressurized. ▪ Settings are to be made by qualified personnel only.▪ Opening is only to be performed with the approval of the manufacturer, otherwise the warranty is invalidated.6.2 Connection RecommendationsNOTE : Enclosed proposed resolution is not always guaranteed. The functionality and the technical details of the construction ma-chine must be checked.5.3 Montage – BauraumObserve connection names.Do not damage seals and flange surface. Its hydraulic system must be ventedEnsure sufficient free space for setting and installation work6.3 Installation - installation space▪ Observe connection names.▪ Do not damage seals and flange surface. ▪ Its hydraulic system must be vented▪ Ensure sufficient free space for setting and installation workCAUTION: Hydraulic hoses must not touch the pressure relief valve, otherwise they are subject to thermal damaging. Tightening torques must be observed. Torque wrench needed.77.1 General Instructions▪The views in drawings are shown in accordance with the European normal projection variant▪ A comma ( , ) is used as a decimal point in drawings ▪All dimensions are given in mm7.2 StandardsThe following standards must be observed when installing and operating the valve:▪ DIN EN ISO 13732-1:2008-12, Temperatures on accessible surfaces8 ZubehörSafety cap: 275.066.000.6。
欧洲药典7.5版
INDEX
To aid users the index includes a reference to the supplement in which the latest version of a text can be found. For example : Amikacin sulfate...............................................7.5-4579 means the monograph Amikacin sulfate can be found on page 4579 of Supplement 7.5. Note that where no reference to a supplement is made, the text can be found in the principal volume.
English index ........................................................................ 4707
Latin index ................................................................................. 4739
EUROPEAN PHARMACOPபைடு நூலகம்EIA 7.5
Index
Numerics 1. General notices ................................................................... 7.5-4453 2.1.1. Droppers...................
多源线性网络编码的同态签名算法

项式时间算法组(eu , in C m ie Vry ,其中 : St Sg , o bn , ei ) p f
() eu 1, 1S tp( Ⅳ)
给定 i 公钥 : G, 2 e , , ) d、 =( . , , , …, 、组合向量 G H, g
h mo  ̄ h c f n to n i n a a rn s n e ce tsg aur c e o l — o r e n t r s c d n g i s o l t n at c s i p o o e . o mo i u c i n a d b l e rp ii g ,a f i n i n t e s h me f rmu t s u c e wo k o i g a an tp lu i ta k s r p s d i i i o Th n e me i t o e t e c r e p n i u l e sC l v rf e i t g iy o e r c i e s g ss g e y d f e n o r e n d swih eitr daen d swi t o r s o d ng p b i k y a l e y t n e r ft e e v d me  ̄ e i n d b if r ts u c o e t hh c i h t h e p v t e s Un e h a d m a l d l t e s h me i p o e e s c r g i s h o r e n d sa d i t r e i t o e t c . i r ae k y . d rt er n o or ce mo e , h c e s r v d t b e u e a a n tt es u c o e n e O n m d ae n d sat ks a
【R高级教程】专题二:差异表达基因的分析
【R高级教程】专题二:差异表达基因的分析应学生及个别博友的要求,尽管专业博文点击率和反应均很差,但在去San Diego参加PAG会议之前,还是抽时间给出【R高级教程】的第二专题。
专题一给出了聚类分析的示例,本专题主要谈在表达谱芯片分析中如何利用Bioconductor鉴定差异表达基因。
鉴定差异表达基因是表达谱芯片分析pipeline中必须的分析步骤。
差异表达基因分析是根据表型协变量(分类变量)鉴定组间差异表达,它属于监督性分类的一种。
在鉴定差异表达基因以前,一般需要对表达值实施非特异性过滤(在机器学习框架下属于非监督性分类),因为适当的非特异性过滤可以提高差异表达基因的检出率、甚至是功效。
R分析差异表达基因的library有很多,但目前运用最广泛的Bioconductor包是limma。
本专题示例依然来自GEO数据库中检索号为GSE11787 的Affymetrix芯片的数据,数据介绍参阅专题一。
>library(limma)>design <- model.matrix(~ -1+factor(c(1,1,1, 2,2,2)))这个是根据芯片试验设计,对表型协变量的水平进行design,比如本例中共有6张芯片,前3张为control对照组,后3张芯片为实验处理组,用1表示对照组,用2表示处理组。
其他试验设计同理,比如2*2的因子设计试验,如果每个水平技术重复3次,那么可以表示为:design <- model.matrix(~ -1+factor(c(1,1,1, 2,2,2,3,3,3, 4,4,4)))。
接上面的程序语句继续:>colnames(design) <- c("control", "LPS")>fit <- lmFit(eset2, design)>contrast.matrix <- makeContrasts(control-LPS, levels=design)>fit <- eBayes(fit)>fit2 <- contrasts.fit(fit, contrast.matrix)>fit2 <- eBayes(fit2)>results<-decideTests(fit2, method="global", adjust.method="BH",p.value=0.01, lfc=1.5)>summary(results)>vennCounts(results)>vennDiagram(results)比较遗憾的是,目前limma自带的venn作图函数不能做超过3维的高维venn图,只能画出3个圆圈的venn图,即只能同时对三个coef进行venn作图。
MalGen:自动提取恶意代码躲避检测的签名
MalGen:自动提取恶意代码躲避检测的签名唐勇【期刊名称】《中国教育网络》【年(卷),期】2016(000)004【总页数】1页(P55-55)【作者】唐勇【作者单位】国防科技大学计算机学院网络安全研究室【正文语种】中文唐勇博士,副研究员,硕士生导师。
在恶意代码分析与检测、二进制代码保护、DPI技术及设备研制、网络设备安全、APT检测等技术方面有15年研究经验。
现任国防科技大学计算机学院网络安全研究室主任,作为负责人承担了国家自然科学基金、国家863、国防科技研究项目近十项,获得国家发明专利授权十余项,获省部级科技进步二等奖3项、三等奖2项,以第一作者在IEEE Transaction on Computers 、Elsevier Computer & Security 等期刊和会议上发表论文十余篇。
自动动态分析是用于检测恶意软件的常用方法。
然而,许多恶意软件在辨认出软件分析环境后,便不再执行恶意行为,从而骗过分析环境的扫描。
为了检测出这样的恶意软件,一种可行的方法是将恶意软件在多种环境(其中包括裸机环境)下运行,通过比对它在不同环境下的行为序列,来判断恶意软件是否会躲避检测。
但是,在应用这样的方法后,还需要人工地去分析恶意软件为了躲避检测所采用的技术。
同时,一些分析工具需要手动地去输入许多多余的信息。
因此,该方法不适合批量处理大量恶意代码样本。
为此,2015年ACM CCS大会上Kirat和Vigna在论文“MalGene: Automatic Extraction of Malware Analysis Evasion Signature”中提出了一个自动提取恶意代码躲避检测签名的系统MalGene,其中躲避检测签名指的是恶意代码运行时系统调用事件和比较事件(CMP指令的执行)的集合。
该系统利用数据挖掘、数据流分析技术实现自动化提取躲避检测签名。
首先,该工作采用序列比对算法实现对躲避检测代码段的定位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Dependable Coding of Fiducial TagsAndrew C.Rice1,Christopher B.Cain2,and John K.Fawcett11Laboratory for Communication Engineering ,Department ofEngineering,University of Cambridge,Cambridge,CB21PZ, 2Department of Pure Mathematics and Mathematical Statistics,Centre for Mathematical Sciences,University of Cambridge,CB30WBAbstract Fiducial tags can be recognised successfully and decoded bycomputer vision systems in order to produce location information.Weterm a system dependable if its observable results are predictable andrepeatable.The dependability of such a vision system is fundamentallydependent on the scheme used to encode data on the tag.We show thatthe rotational symmetry common to many tag designs requires particu-lar consideration in order to understand the performance of the codingschemes when errors occur.We develop an abstract representation oftags carrying symbolic data which allows existing information codingtechniques to achieve robust codes.An error-correcting coding schemeis presented for carrying arbitrary symbolic data in a dependable visionsystem.1IntroductionHigh precision location information is an excellent source of context for many ubiquitous applications.Unfortunately,the sensing systems required to source such information are expensive to build,deploy and maintain—GPS is an ex-ample of this.Location systems that can derive information from commodity components such as WaveLAN or Bluetooth understandably fall short of the level of precision provided by more specialised,expensive systems.Vision systems are an exception.They can be constructed from commodity components and yet have the potential to provide highly accurate information (c.f.photogrammetry).Modern cameras and CCD arrays can provide good qual-ity images[1],whilst distortion caused by lensing systems[2]can be corrected to accuracies better than0.01pixels[3].Fiducial tags are often used as markers to simplify the image recognition process.They present particular features to allow the application of faster processing algorithms and more robust recognition than for unconstrained vision systems.Recently,researchers have begun to acknowledge the importance of reliability for ubiquitous computing[4].The new users of context-aware systems will not have technical backgrounds or in-depth understanding of sensing systems and yet must be convinced to trust these systems to assist in their tasks.The system must display predictable behaviour upon which users will base their mentalmodels of the system.A system is considered dependable its observable results are predictable and repeatable.In order to ensure that a location system is as dependable as possible we must ensure that every algorithm and process used within the system is robust and that the errors inherent within the system are understood.Identity is as a primary source of context useful to ubiquitous computing[5].The robustness of identity information for vision systems relates to the mechanism used for encoding information identifier on thefiducial tag.Squares and circles are common choices offiducial shape for vision systems. Each of these shapes displays rotational symmetry that reduces the expected difference between each unique payload.We present a classification of coding systems for black and whitefiducial tags and suggest a suitable design separation between tags and coding schemes so each can be considered in isolation.In particular,the importance of cyclic codes is demonstrated when considering the rotational symmetry of planar tags.Finally,we present new,robust coding schemes for encoding symbolic data as the tag payload.2Template-Based CodesA template code encodes an identifier as a pattern that is decoded by searching a database of possible patterns for the closest match.ARToolKit[6]uses a set of manually-chosen patterns encoded onto a square tag.The imaged tag is com-pared,after perspective correction,using an auto-correlation co-efficient with a database of all issued patterns.The four-fold rotational symmetry of the tag is accommodated by comparing the template in all four corresponding rotations. The designers encourage users to select tag designs with strong asymmetric fea-tures.The purported advantage of this method is that the tag designs can be selected to have semantic meaning for the users of the system as any image can be used.However,the ad hoc selection for tag templates means that the system cannot guarantee good separation of the targets.Owen et al.present a scheme for selecting a set of greyscale(asymmetric) templates with maximum auto-correlation distance[7].This process creates ap-proximately200maximally separated tags,but the tags no longer have semantic meaning for a human reader.Figure1shows an example template from AR-ToolKit and one using the maximum separation scheme.Template schemes present a number of problems for a dependable vision sys-tem.Firstly,an analysis of the set of templates must be performed to verify that the auto-correlation between any pair of patterns is small and so incremental de-ployment is difficult.Secondly,perspective projection combined with the limited resolution of CCD cameras will introduce distortion into the imaged template affecting the correlation co-efficient;current schemes for template selection do not take this into account.Thirdly,noise produced by the image acquisition phase(e.g.dark current)will introduce additional distortion to the templates. Finally,wide-scale deployment of a vision system will require a large address space that cannot be provided with this mechanism.For example,in our lab ofFigure1.A sample template from the ARToolKit distribution(left)and from the maximum distance set(right).approximately40people we have206tagged items—already exceeding the limit of the maximum distance method.3Symbolic CodesA more promising approach for coding data on tags is a symbolic method.The tag is divided up into data cells,each of which is capable of storing a symbol. This approach presents a number of potential advantages over template-based codes:we expect to be able to achieve a substantially larger address space and error detecting or error correcting codes give the ability to detect or recover from image noise.If human interpretation of the tags is required a tag design could easily include human readable text or icons in addition to the machine readable coding.Readers of symbolic tags should expect both single bit and burst errors.A bit error could occur due to the image being sampled at incorrect points or due to noise from the CCD array.Partial occlusions of the tags or complex lighting conditions will cause burst errors and an entire sequence of symbols will be misread.We assume that these errors are equally likely to occur across the whole tag.The current generation of symbolic tags does not take full advantage of the error handling potential of symbolic codes due to the rotational symmetry of the tags.For example,TRIP[8]uses circular tags with two rings of data split into sectors.Each sector stores one of four possible symbols(each ring within the sector stores a binary value).The symbol corresponding to a completely black sector is reserved for a synchronisation sector.The remaining tag consists of two checksum sectors and the payload encoded as a base3number(because the fourth symbol is reserved for synchronisation).Despite the(weak)error detection properties of the checksum the code is limited by the unprotected synchronisation sector.As a result this scheme can only ever guarantee to detect one bit of error; two bits of error suffice to fool the system into starting decoding from the wrong sector.Whether or not this invalid reading will pass the checksum depends on the data that was encoded.The Matrix Tag system[9]uses square tags to carry arbitrary payloads with CRCs appended on the ends.This approach lacks robustness because the tag has four-fold rotational symmetry.Thus,rotated tags read as permutations of the original code.We have no analytical way to determine whether or not these permutations will contain a valid CRC.Zhong et al.present a square tag which carries5bits of data protected by a block sum code check or6bits of data protected by a Hamming code[10]. The four corner bits are used for orientation to ensure that the correct code can be read from the tag.Unfortunately,the block code does not protect these orientation bits and so two bits of error in the image can result in the system reading a rotated tag from the wrong orientation and thus returning an invalid code.The Hamming distance of this code should thus be considered to be only two bits until it can be proven that no two codes are rotationally self-similar.Cho and Neumann encode data on their multi-ring circular tags using solid rings chosen from n colours[11].Assuming these colours can be reliably identified by the system,the method has the potential to be robust because the code can be read radially at any position.However,the amount of data that can be stored on the tag is small due to the large amount of redundancy.Also,an additional error correcting code would be needed if error correction capability was required. 4Rotational InvarianceThe rotational symmetry of tags means that permutations of the codes can be read.Some current code designs attempt to resolve this problem by introducing anchor points in to the code(such as TRIP’s synchronisation sectors or Zhong’s orientation bits)but fail to protect these data when protecting the payload. Other systems have relied on the error detection capabilities of the coding scheme to additionally detect rotations of the tag data.The chance of collisions due to this approach cannot be analysed with existing information coding theory.Cyclic codes present a solution to the rotational symmetry problem.One property of a cyclic code is that any rotation of a valid codeword is also a valid codeword.If we arrange data coded with a cyclic code in such a way that rotations of the tag correspond to rotations of the sampled data(rather than general permutations)then we can be assured that the error detecting or error correcting capabilities of the code will be unaffected.This separates the code from tag design details and enables a mathematical analysis of code capability. To see that this is true consider the following scenario.Suppose the minimum distance of the original code is d and given a valid codeword we introduce an error in less than d places.If the resulting word is equal to the rotation of some codeword then it itself must be a codeword(all rotations of codewords are codewords!).This contradicts the fact that the original code had minimum distance d.We shall use the term rotational invariance for reading a code from a tag such that all symmetric rotations of the tag correspond to rotations of the code. It is straightforward to arrange to read a circular tag in a rotationally invariantFigure 2.A circular tag can be read in a rotationally invariant manner (left)or a non-invariant manner (right).Figure 3.A square tag can be read in a rotationally invariant manner (each reading could start in any of the four corners).Tags with an odd number of cells must sacrifice the central cell.manner(Figure2).Arranging to read a square tag in this manner is less ge-ometrically intuitive.For example,the immediately-appealing raster approach produces a different permutation of the code depending on the starting corner.A scheme that reads the tag as four triangular sections achieves rotational in-variance(Figure3)but if the code grid contains an odd number of data cells then the central cell cannot be used.If we apply a cyclic code to a tag in a rotationally invariant manner we know that the error detecting or error correcting properties of the code will not be affected by the rotational symmetry of the tag.However,this presents an additional problem because the system will be unable to select the correct code from the set of possibilities read from the tag.Each possibility will appear as a valid codeword(after applying any applicable error correction routine).One approach is to select the particular rotation which has a smaller value than every other possibility.This means that for each value coded onto a tag there will be a number of additional codewords which also decode to the same value.We call codes exhibiting this property symbolic identifier codes—the code cannot store arbitrary data(without using a non-systematic code).We can characterise a tag’s data-carrying capability in terms of two variables: Symbol Size is the number of bits allocated to storing each symbol.If the tag is rotated by one place and the code re-sampled,the new value should be identical to the previous value after a rotation through symbol size bits;Payload Size is number of symbols the tag can store.A circular tag with m rings and n sectors thus has a symbol size of m bits and a payload size n.A2p×2p square tag laid out using the rotational invariant scheme in Figure3has symbol size of p2bits and payload size4whereas a (2p+1)×(2p+1)tag has a symbol size of p(p+1)bits and payload size of4 symbols.We can also parameterise coding schemes in a similar way.The number of symbols corresponds to the size of thefield used to define the polynomials in the cyclic code.For example,the various generator polynomials for a CRC are defined over thefield with two elements(symbol size is1-bit).Reed Solomon codes(a subset of BCH codes),which are used for error correction on CDs and DVDs(among other things),can be defined forfields of size256(symbol size is 8bits).Of course,if the tag provides a symbol set of size8then codes requiring a symbol size less than8can be accommodated by packing additional symbols into each sector(with a corresponding increase in the payload size).The payload size must equal the block length of the cyclic code.This pre-cludes the use of CRCs:the generator polynomial for CRC-CCITT(a16bit CRC)has a block length32767bits.Typically,a CRC is used with much smaller messages than this—the unused bits are assumed to be zero and not transmit-ted.For a symmetric tag we do not have this luxury because we must transmit the zeros as well in order for all rotations of the code to be valid codewords.A circular tag carrying CRC-CCITT data would need151rings and217sectors!5Robust Data Coding SchemesWe have identified the concept of rotational invariance,that allows robust appli-cation of cyclic codes to symmetric tags.This exposes the ambiguity introduced into the coding system and hence reduces the codes to carrying only identi-fiers which can then be used for a database lookup,rather than symbolic data. Furthermore,we have shown that existing techniques that use synchronisation sectors or orientation bits to anchor the code are not capable of coping with more than1bit of error.It is possible to design synchronisation sectors that can withstand more than one bit of error at the expense of a reduced payload.We now present some additional coding schemes that allow tags to carry arbitrary data robustly.5.1Simple Parity CodeA bit string with parity at the end fulfils our criteria for a rotationally invariant code:every rotation of the coded data should also have valid parity.To generate a code we take a tag with payload size p and symbol size s and encode s(p−1) bits and an additional parity symbol.This is an example of a code that can only encode an identifier because the decoded message must be rotated round until the minimal value is found.However,it achieves the same minimum hamming distance as the TRIP code and the Hamming code scheme by Zhong et al.and can store considerably more data.5.2Independent Chunk CodeGiven a tag with a large symbol size,each symbol is considered as a separate codeword which is protected by an error detecting or error correcting code.The first bit of each symbol is used to anchor the code:thefirst bit of thefirst symbol is set and thefirst bit of every other symbol is unset.For example,a square tag of size8×8has a symbol size of16and a payload size of4symbols.We can encode a44-bit payload in four11-bit chunks.Each symbol on the tag contains one chunk,one orientation bit,and a4-bit CRC(Figure4).This code is at least as strong as the4-bit CRC used for each symbol,if the designer required stronger error detection or error correction then a different code can be used for each symbol.In the cases where errors occur evenly over the tag rather than concentrated in one sector this code should be rather stronger than a single CRC-4.The orientation bits are included in the CRC-4for additional reliability.The drawbacks of using this code is that4bits of every symbol are used to get the same Hamming distance as traditional use of a single4-bit CRC.Additionally a further bit is required per symbol to orient the code.The advantage of this encoding method is that the code need not have rotational invariance and so a truncated CRC is permissible.Figure4.The Independent Chunk Code operates on a tag with large symbols,each of which contains an orientation bit and some error protection.5.3Structured Cyclic CodeOur third scheme is a more conventional cyclic code with additional structure that encodes the amount of rotation that the code has undergone.The full details are presented in Appendix A.A generator polynomial f is chosen that will produce a code with the desired error detecting or error correcting capabilities. The target tag has a symbol size s and a payload size n.An auxiliary generator polynomial h,dependent on f,is then found and a primitive polynomialωis found from h.These parameters arefixed for a particular instance of this coding scheme and so the computational costs offinding them is not a run-time issue.We encode a message m of n−deg(f)−deg(h)symbols and an arbitrary numberα,0≤α<(2s deg(h)−1)/n by careful choice of a check polynomial c based onω,α,m,h and f.The data(α,m)are encoded as X r m+c i.e.the message m is left-shifted by r symbols and the check polynomial c is written into the low bits.This will be a valid codeword for the generator polynomial f and so traditional error correction routines from the literature[12]can be applied. The additional structure imposed on our check polynomial c further provides a means of recovering the amount of rotation the code has undergone(in addition toα).6EvaluationWe used a test system to evaluate the performance of our new cyclic coding schemes.A circular tag with5rings and31sectors was used to carry a payload encoded with each of the new schemes.–TRIP Adaption of the original coding technique used in the TRIP system:1 synchronisation sector followed by2checksum sectors and28payload sectors encoded base31.–SPC Simple Parity Code:154payload cells(not sectors)followed by1parity cell encoded base2.–ICC Independent Chunk Code:31independent chunks(one per symbol) containing1orientation bit,1parity bit and3bits of payload;–SCC-1Structured Cyclic Code with f chosen as in a Reed-Solomon code giving3symbols of separation between codewords.–SCC-2Structured Cyclic Code with f chosen as in a Reed-Solomon code giving11symbols of separation between codewords.Figure5shows the system reading tags,each carrying the same value,en-coded with each of the coding schemes mentioned above.The data carrying capabilities of each of these codes are given in Figure6.An OpenGL test harness was used to render tags fully facing the camera at a distance2times the tag width and1000trials per code with each coding scheme were run.Gaussian noise(mean0and standard deviation53)was injected into the images and the target tags decoded.We define three possible results from each test run.–Successful Read The payload on the tag is decoded and the returned code matches the value encoded(a true positive).–Failed Read The payload on the tag fails to decode and so the system fails to recognise a tag.–False Read The payload on the tag is decoded but the returned code does not match the encoded value,i.e.the error detection built into the code is defeated(a false positive).Figure7shows the percentage of frames for each code that contained successful readings,failed readings and false readings.Normalised values for these percent-ages are obtained by multiplying by the proportion of the utilised address space. The results confirm that allocating more bits to error control strengthens the code.The SCC-2shows a particularly high successful read rate due to its large error-correcting capability.This redundancy also gives it a false read rate small enough that it failed to manifest itself in our1000samples.The error correction ability of the SCC-1code increases the successful read rate above that of the non-correcting codes at the expense of increasing the false read rate.The TRIP, SPC,and ICC codes have the same minimum hamming distance.However,the noise was evenly distributed across the whole image and so the ICC code’s parity bits acted mostly independently giving it good false read rate.The TRIP code distributes the code particularly unevenly over the tag,this manifests itself in the code’s more variable behaviour than the ICC code—it shows an increased successful read rate and an increased false read rate even though there is no attempted error correction.For interactive systems,designers might choose to minimise the false read rate at the expense of a higher failed read rate because users can be expected to retry a tag if it fails to read.For a circular tag we wish to sample data points at the centre of each sector. To achieve this we need to apply an offset to the angle of each sector.However, the symmetry of a circular tag means that this offset is unknown.One scheme for achieving a reliable reading is to attempt to read the code n times from the tag at intervals of1/n sectors.The system can then select the correct reading by(a)TRIP (b)SPC—Simple Parity Code(c)ICC—Independent Chunk Code (d)SCC-1—Structured Cyclic Code(e)SCC-2—Structured CyclicCodeFigure 5.Examples of the system decoding each of the evaluated code types.The tags (faded to grey)have been sampled at the points shown.Name Hamming Distance13915493141101Successful Read False ReadNormalised Normalised Normalised24.074.0 2.0031.046.023.027.172.60.30055.7 6.2038.194.0 6.00<10Figure7.The success,failed,and false reading rates for a circular tag with5rings and31sectors.looking for duplicate readings.From a viewpoint of coding robustness this acts similarly to a repetition code:the same bit error must be present in two or more of the readings in order for it to be considered as a valid code.In practice this reduces the false error rate almost to zero for each of the coding techniques.Of course,if the errors in the decoding are systematic—perhaps due to an occlusion or lighting conditions—this will not be as successful.Also,use of this method reduces the success rate of the code as well,especially for the error correcting codes.A further experiment using the TRIP,SPC,and ICC tests was performed using a square tag of size12×12rather than a circular tag.The SCC codes cannot be applied to square tags due to the constraints imposed on the message size.The ICC code for a square(Figure8)is rather more efficient than for a circular tag due to the increased symbol size.We expect the square tag to perform less well as compared to the circular tag because its payload area is smaller.Figure9shows the various decoding rates which bear out the same trends as for the circular tag.This provides some justification for our argument that code selection can be done in isolation from the actual tag design.The ICC(square)code presents a better normalised successful read rate than the TRIP(square)code which is contrary to the results for circular tags.This is because the ICC code is much more efficient for tags with large symbol sizes and so its success rate is boosted to acknowledge this.However,the increased symbol size means that there will be fewer parity bits embedded in the code—this is reflected by the increased false read rate for ICC(square)over ICC(circle).Figure8.A square tag carrying data with the ICC coding scheme.The tag(faded to grey)has been sampled at the points shown.One symbol,including its orientation bit and parity bit,has been highlighted.Name Failed Read%%%TRIP(square)9.547563.12917 3.027778SPC(square)27.408343.6944428.40139ICC(square)22.666766.58333 5.194444Figure9.The successful,failed,and false reading rates for the evaluated coding schemes on a square tag of size12×12.7Asymmetric TagsAnother approach is to introduce an asymmetric feature into the tag design thus permitting use of conventional coding systems.For example,Foxlin[13]presents a system that uses an off-centre eyelet for this purpose.This addition to the tag design should be as unintrusive as possible as it will reduce the size of the data carrying area of the tag.However,we must also ensure that the noise in the image does not cause us to mis-read the orientation of the tag.In order to maximise the data carrying capability of the tag we require that the new feature and the data carrying code are equally resistant to image noise—correct choice of the tag orientation is useless if the code cannot be subsequently decoded.It is difficult to quantify the strength of the introduced asymmetric feature and so designers must err on the side of safety.QR Codes are a popular2-dimensional barcode that use a particular pattern on three corners to orient the tag.Four different levels of error correction are available of which level‘M’corresponds most closely to the level afforded by the SCC-2code presented above.QR Codes are available in a number of sizes, the largest of which has a data area with dimensions177×177.This size of tag can store186483bits which corresponds to a utilisation of59.5%whereas theSCC-2code has a utilisation of64%.The primary reason for this is that the area occupied by the asymmetric features added to the QR Code is disproportionately large compared with the error correction capability of the error correcting code.Use of symmetric tags and rotationally invariant codes is advantageous in this respect because the minimum amount of payload space is wasted in order to encode rotation information.Also,rotationally invariant tags result in the least possible complication of the computer vision aspect of the decoding.The system need only read the data from the tag rather than search for additional features before decoding the information.8ConclusionA dependable location system requires robust,predictable behaviour for every element of its operation.The choice of coding scheme used to store data on afiducial tag is an important aspect often overlooked.Template-based systems pose a particular risk because it is difficult to analyse the effects of image noise or perspective projection on the pattern.Current symbolic coding schemes have not fully appreciated the rotational ambiguity caused by symmetric tags and thus do not have quantifiable characteristics.Sentient Computing must be dependable in order to fulfil its potential.This requires rigorously understood coding schemes and this work provides useful,successful,and efficient examples.Tag abstraction coupled with the principle of rotational invariance allows tags to utilise existing information coding techniques and makes the result amenable to rigorous mathematical analysis.This decomposition highlights a particular class of symbolic codes capable only of encoding identifiers due to the rotational ambiguity of the tags.For systems requiring arbitrary symbolic data we have presented a number of dependable coding schemes.When selecting a suitable code for a tag design we may choose to optimise based on the message size,error handling capabilities,implementation difficulty or computational cost.The Structured Cyclic Coding scheme presented herein proves to be a good choice:it makes efficient use of the available payload space to carry a large message whilst still providing a large degree of error correction. It allows one to encode arbitrary data and requires the minimal amount of computer vision possible.Future work will be to document the extension this technique to apply to square tags as well as circles.Another approach for dealing with rotational symmetry was to introduce asymmetric features to the tag to break the ambiguity.However,designing the additional features required less efficient that the approach suggested here due to the(unmeasurable)trade-offbetween feature size and tag capacity.A Robust Data Coding Scheme for Symmetric TagsWe operate in thefinitefield of size q=p s where p is a prime number and s is an integer.Selecting p=2leads to a convenient and efficient implementation. However this is not possible in the case of SCC for a square tag(see later).Take。