自动化专业英语考试题与复习
专业英语练习卷 A(答案)
《专业英语(自动化)》复习卷A卷一.Put the following words and phrases into English or chinese. (20*1=20)1.电路circuit 2.控制系统Control system 3.元件component 4.电压voltage 5.电流current 6.欧姆定律Ohm’s Low 7.开关switch 8.指针needle 9.螺丝刀Scrow driver 10.引脚pin 11.Strip条纹12.Intergrated circuit集成电路13.chip晶片14.sensor传感器15.maintenance维护16.actuator执行器17.joint关节18.servomotor伺服电机19.telerobot遥控机器人20.gripper夹爪二.C hoose one word from the word list below to fill in the blank in each of thefollowing sentences. (20*1=20)1)Digital 2)analog, 3)positive 4)common 5)a function switch 6)a range switch 7)extended ranges of voltage 8)dc and ac9)current 10) resistanceA multimeter is a general-purpose meter capable of measuring 8 voltage,9 , 10 , and in some cases, decibels. There are two types of meters: 2 using a standard meter movement with a needle (see Fig 3.1(a)), and , with an 1 electronic numerical display (see Fig 3.1(b)).Both types of meters have a 3 (+) jack and a 4 jack (-) for the test leads, 5 to select dc voltage, ac voltage, dc current, ac current, or ohms and 6 for accurate readings. The meters may also have other jacks to measure 7 (1 to 5 kV) and current (up to 10A) there are some variations to the functions used for specific meters.1)Resistance 2)placed across (in parallel) 3)be removed4)in series with 5)mechanical adjust 6)automatic indicator5)properly 8) test leads 9)correct 10)be openedBesides the function and range switches (sometimes they are in a single switch.) The analog meter may have a polarity switch to facilitate reversing the test leads. The needle usually has a screw for 5 to set it to zero and also a zero adjust control to compensate for weakening batteries when measuring 1 . An analog meter can read positive and negative voltage by simply reversing the 8 or moving the polarity switch. A digital meter usually has an 6 for polarity on its display.Meters must be 7connected to a circuit to ensure a 9 reading. A voltmeter is always 2 the circuit or component to be measured. When measuring current, the circuit must 10 and the meter inserted 4 the circuit or component to be measured. When measuring the resistance of a component in a circuit, the voltage to the circuit must 3 and the meter placed in parallel with the component.三.Read the following passage and answer the questions.(5*8=40)RobotsRobots produce mechanical motion that,in most cases,results in manipulation or locomotion.For example,industrial robots manipulate parts or tools to perform manufacturing tasks such as material handing,welding,spray painting,or assembly;automated guided vehicles are used for transporting materials in factories and warehouses.Telerobots provide astronauts with large mainipulators for remotely performing spacecraft maintenance.Robots perform repetitive,high-precision operations 24 hours a day without fatigue.Robots on this automobile assembly line weld body parts together.The General Motors corporation uses about 16,000 robots to weld,assemble,and paint automobiles.Walking robots explore active volcanoes.Mechanical characteristics for robots include degrees of freedom of movement,size and shape of the operatingspace,stiffness and strength of the structure ,lifting capacity,velocity ,and acceleration under load.Performance measures include repeatability and accuracy of positioning,speed,and freedom from vibration.A robot is made up of sensors,actuators,and computatlonal elements(a microprocessor).Actuators for moving joints of a robot are usually electric servomotors.In the past ,larger robots were built with hydraulic actuation due to their high payload capacity and ability to work in explosion-prone environments.In the 1990s,there was a trend by the major manufacturers to use electric actuators in most of their industrial robots.A robot is an automatically controlled, reprogrammable, multipurpose, manipulating machine with several reprogrammable axes, which may be either fixed in place or mobile for use in industrial automation applications.The key words are reprogrammable and multipurpose because most single-purpose machines do not meet these two requirements. The term “reprogrammable” implies two things: The robot operates according to a written program, and this program can be rewritten to accommodate a variety of manufacturing tasks. The term “multipurpose” means that the robot can perform many different functions, depending on the program and tooling currently in use.Over the past two decades, the robot has been introduced into industry to perform many monotonous and often unsafe operations. Because robots can perform certain basic tasks more quickly and accurately than humans, they are being increasingly used in various manufacturing industries.1.What industrial robots can do for people?Industrial robots manipulate parts or tools to perform manufacturing tasks such as material handing,welding,spray painting,or assembly;automated guided vehicles are used for transporting materials in factories and warehouses.2.What are the advantages of robots?igue.Robots perform repetitive,high-precision operations 24 hours a day without fat3. What parts are made up of the robot?A robot is made up of sensors,actuators,and computatlonal elements(a microprocessor).4.What does t he term “reprogrammable” impl y?The term “reprogrammable”implies two things: The robot operates according to a written program, and this program can be rewritten to accommodate a variety of manufacturing tasks.5.Why are robots widely used over the past two decades?Because robots can perform certain basic tasks more quickly and accurately than humans, they are being increasingly used in various manufacturing industries.四.Read the following passage and t ranslate the underlined phrases and sentences into Chinese.(5*4=20)Classification of Robots1.Industrial robots vary widely in size, shape, number of axes, degrees of freedom, and design configuration. Each factor influences the dimensions of the robot’s working envelope or the volume of space within which it can move and perform its designated task. A broader classification of robots can been described as below.Fixed-and Variable-Sequence Robots. The fixed-sequence robot (also called a pick-and place robot) is programmed for a specific sequence of operations. Its movements are from point to point, and the cycle is repeated continuously. 2.The variable-sequence robot can be programmed for a specific sequence of operations but can be reprogrammed to perform another sequence of operation.3.Playback Robot. An operator leads or walks the playback robot and its end effector through the desired path. The robot memorizes and records the path and sequence of motions and can repeat them continually without any further action or guidance by the operator.Numerically Controlled Robot. 4.The numerically controlled robot is programmed and operated much like a numerically controlled machine. The robot is servo-controlled by digital data, and its sequence of movements can be changed with relative ease.5.Intelligent Robot. The intelligent robot is capable of performing some of the functions and tasks carried out by human beings. It is equipped with a variety of sensors with visual and tactile capabilities.1. 工业机器人在尺寸、形状、轴的数量、自由度、设计构型等方面广泛的变化。
自动化专业英语试卷及答案
自动化专业英语试卷及答案第一篇:自动化专业英语试卷及答案2008年秋冬学期研究生专业英语期末考试试卷参考答案1.Translate the following words or phrases into Chinese ① Metric度量收敛方差随机等价动态方程判据、评价标准测量模型偏微分方程在概率意义上,依概率② Convergence③ Covariance④ Stochastic⑤ Equivalence⑥ Dynamic equation⑦ Criteria⑧ Measurement Model⑨ Partial derivative equation⑩ In the sense of probability2.Explain the following symbols in English① '' bmthe second order derivative ofb sub m, bdouble prime sub m②③④ A⇔BA is equivalent toapproaches aB xi→axi y∂y∂xxthe partial derivative ofwith respective toa⑤ ⎰b⑥ a‖b⑦⑧ 3=ffintegral between limits b to a a is parallel to the cube root of set aAbXaaA⊆X is contained in b d⑨ (a+b-c⨯d)÷edivided by ⑩ e plusminus c multiplied , allequals ∀ε,∃N,s.t ai→a as i→∞for any special ε, there is a respected N,such that aiapproachesaas i approaches∞二、Translate the following paragraphs into Chinese Paragraph A[8 Points]A subsetd(x,y)<MA⊆Xis said to be bounded if there existsx,y∈AM∈Rsuch thatfor all.The diameter of A is defined to besup{d(x,y)x,y∈A}.A bounded metric space is one for which X itself is bounded.Bounded intervals in R are bounded sets.A discrete metric space is bounded(take译文:一个子集Ad(x,y)<MM=1).⊆X被称为是有界的,如果存在Mx,y∈A∈R使得对所有x,y∈A有。
自动化专业英语复习资料

Translate the following sentences into Chinese。
(2)Although current and voltage are the two basic variables in an electric circuit,they are not sufficient by themselves。
For practical purposes,we need to know how muchpower an electric device can handle。
虽然电流和电压是电路中的两个基本变量,但是它们本身是不足够的。
出于实用的目的,我们需要知道电气设备可以处理多大的功率。
(3)In any linear circuit containing multiple independent sources,the current or voltage at any point in the network may be calculated as the algebraic sum of the individual contributions of each source acting alone。
任一含有多个独立电源的线性电路,某处电压或电流都是电路中各个独立电源单独作用时,在该处分别产生的电压或电流的叠加。
(5)Since an 8-bit code can represent 256 segments,its codes for the same analogvalue are shown with the maximum analog signal of 1.5V equal to 255 。
Notice thatthe 8-bit code is two groups of 4-bit codes,which are also expressed inhexadecimal form。
自动化专业英语练习

自动化专业英语练习一、过去分词短语做后置定语练习1、A system characterized by the relation y=x2is not linear.2、Practically all PID controllers made today are based on microprocessors.3、The basic control system concept may be the simple block diagram shown inFig 1.4、A general structure of a closed-loop control system is given in Fig.1.5、The manipulated variable is the variable used to maintain the controlledvariable at its set point.6、This is a simple unity feedback system and is the standard block diagram usedto illustrate the basic concepts of control theory.7、In Figure.1.1, the sensor and the actuator are considered part of the blocklabeled “Process”.8、In the simplest situation, one controls a single plant variable, called the output,by means of adjustments to a single plant input.9、For instance, amplifiers used in control system often exhibit saturationeffect(饱和效应) when their input signals become large.10、M uch of this work was presented at the first conference of the newly formedInternational Federation of Automatic Control held in Moscow in 1960.二、介词短语做后置定语练习1、A mathematical model of a control system is essential.2、An open-loop system is a system without feedback.3、The input-output relationship in the Laplace domain is called the transferfunction.4、Because the systems under consideration are dynamic in nature, the descriptiveequations are usually differential equations.5、What is missing in the open-loop control system for more accurate and moreadaptable control is a link of feedback from the output to the input of the system.6、A system with one or more feedback paths is called a closed-loop system.7、Often the difference between the output of the system and the reference input is amplified and used to control the system so that the difference is continually r educed.8、According to this rule the blocks in parallel connection can be combined intoone block and the overall transfer function is then the sum of the individual block transfer function.9、The mathematical model describes the relationship between the input and theoutput of the system.10、In the present study, attention is confined to those systems for which theinput-output relationship is described by ordinary liner differential equations with constant coefficients.三、现在分词短语做后置定语练习1、A plant is a piece of equipment, perhaps just a set of machine parts functioningtogether, the purpose of which is to perform a particular operation.2、Diagrams representing these two basic strategies of control are shown in fig.1.3、The term mathematical model means the mathematical representationsdescribing the relationships among the variables of a system.4、Stability depends on the roots of the characteristic equation having negativereal parts.5、The transfer function description does not include an information concerningthe internal structure of the system.6、By using the physical laws describing the linear system, we can obtain a set oflinear differential equations.7、These signal processing tasks are implemented through the use of appropriatehardware called the controller.8、A control system is an organized collection of interacting units designed toachieve some specified objectives by manipulation and control of materials, energy, and information.9、Following transfer functions defined in the feedback control systems are veryuseful in our study.10、The transfer function of a system (or element)representsthe relationshipdescribing the dynamic of the system under consideration.四、其它形式的后置定语1、不定式做后置定语(1)In a radar tracking system, the position and speed of the target to be trackedmay vary in an unpredictable manner.(2)Measurement of the variable to be controlled is usually done by thecombination of sensor and transmitter.(3)The engineer designing a control system must be sure that the action takenaffects the variable to be controlled, that is, the action taken affects the measured value.2、形容词短语做后置定语(1)In order to obtain more accurate control, the controlled signal must be fed backand compared with the reference input, and an actuating signal proportional to the difference of the output and the input must be sent though the system to correct the error.3、定语从句做后置定语(1)Every feedback control system consists of components that perform specificfunctions.(2)There are many situations where several variables are to be controlledsimultaneously by a number of inputs.(3)When a system does not have the feedback structure, it is called an open-loopsystem, which is the simplest and most economical type ofthe control system.(4)An open-loop system is a system whose input u(t) does not depend on the output y(t)(5)Another approach to control systems design was introduced in 1948 byW.R.Evans, who was working in the field of guidance and control of aircraft.(6)Open loop refers to the condition in which the controller is disconnected fromthe process.(7)An automatic regulating system in which the output is a variable such astemperature, pressure, flow, liquid level, or pH is called a process control system.。
2024年电气自动化专业高职单招技能考试题库及解答英文版

2024年电气自动化专业高职单招技能考试题库及解答英文版Document Title: 2024 High Vocational College Admission Skill Test Question Bank and Answers for Electrical Automation Major1. IntroductionWelcome to the 2024 High Vocational College Admission Skill Test Question Bank for the Electrical Automation major. This document aims to provide a comprehensive set of questions and answers to help students prepare for the upcoming skill test.2. Electrical Fundamentalsa. Define Ohm's Law and explain how it is used in electrical circuits.b. What are the differences between AC and DC currents?c. Describe the purpose and function of a transformer in an electrical system.3. Automation Technologya. What is PLC (Programmable Logic Controller) and how is it used in industrial automation?b. Explain the concept of HMI (Human Machine Interface) and its role in automation systems.c. Discuss the importance of sensors and actuators in automated processes.4. Control Systemsa. Define PID control and explain its significance in control systems.b. Compare open-loop and closed-loop control systems.c. Describe the function of a frequency inverter in controlling the speed of an electric motor.5. Safety Regulationsa. List the safety precautions that should be followed when working with high voltage equipment.b. Explain the importance of proper grounding in electrical installations.c. Discuss the significance of lockout-tagout procedures in ensuring safety in industrial settings.6. Troubleshooting and Maintenancea. Outline the steps involved in troubleshooting a malfunctioning electrical circuit.b. Describe the preventive maintenance practices that can be implemented to ensure the longevity of automation systems.c. Discuss the role of predictive maintenance techniques in reducing downtime and improving system reliability.7. Practical Applicationsa. Provide examples of industries where electrical automation systems are commonly used.b. Describe a real-world automation project and the challenges faced during its implementation.c. Explain how advancements in IoT (Internet of Things) are influencing the field of electrical automation.8. ConclusionIn conclusion, this question bank serves as a valuable resource for students preparing for the 2024 High Vocational College Admission Skill Test in the Electrical Automation major. By familiarizing themselves with the topics covered in this document, students can enhance their knowledge and improve their chances of success in the exam.Good luck with your preparations!。
最新自动化专业英语考试整理版
翻译P.1The voltage across a pure inductor is defined by Faraday’law,which states that the voltage across the inductor is proportional to the rate of change with time of the current through the inductor.thus we have U=Ldi/dt.纯电感电压由法拉第定律定义,法拉第定律指出:电感两端的电压正比于流过电感的电流随时间的变化率。
因此可得到:U=Ldi/dt 式中di/dt = 电流变化率,安培/秒;L = 感应系数,享利。
P.3A three-phase electric circuit is energized by three alternating emfs of the same frequency and differing in time phase by 120 electrical degrees .三相电压的产生三相电路可由三个频率相同在时间相位上相差120°电角度的电动势供电。
P.9One problem with electronic devices corresponding to the generalized amplifiers is that the gains,AU or AI ,depend upon internal properties of two-port system( ).This makes design difficult since these parameters usually vary from device to device ,as well as temperature .运算放大器像广义放大器这样的电子器件存在的一个问题就是它们的增益AU或AI取决于双端口系统(m、b、RI、Ro等)的内部特性。
专业英语练习卷 A(答案)
《专业英语(自动化)》复习卷A卷一.Put the following words and phrases into English or chinese. (20*1=20)1.电路circuit 2.控制系统Control system 3.元件component 4.电压voltage 5.电流current 6.欧姆定律Ohm’s Low 7.开关switch 8.指针needle 9.螺丝刀Scrow driver 10.引脚pin 11.Strip条纹12.Intergrated circuit集成电路13.chip晶片14.sensor传感器15.maintenance维护16.actuator执行器17.joint关节18.servomotor伺服电机19.telerobot遥控机器人20.gripper夹爪二.C hoose one word from the word list below to fill in the blank in each of thefollowing sentences. (20*1=20)1)Digital 2)analog, 3)positive 4)common 5)a function switch 6)a range switch 7)extended ranges of voltage 8)dc and ac9)current 10) resistanceA multimeter is a general-purpose meter capable of measuring 8 voltage,9 , 10 , and in some cases, decibels. There are two types of meters: 2 using a standard meter movement with a needle (see Fig 3.1(a)), and , with an 1 electronic numerical display (see Fig 3.1(b)).Both types of meters have a 3 (+) jack and a 4 jack (-) for the test leads, 5 to select dc voltage, ac voltage, dc current, ac current, or ohms and 6 for accurate readings. The meters may also have other jacks to measure 7 (1 to 5 kV) and current (up to 10A) there are some variations to the functions used for specific meters.1)Resistance 2)placed across (in parallel) 3)be removed4)in series with 5)mechanical adjust 6)automatic indicator5)properly 8) test leads 9)correct 10)be openedBesides the function and range switches (sometimes they are in a single switch.) The analog meter may have a polarity switch to facilitate reversing the test leads. The needle usually has a screw for 5 to set it to zero and also a zero adjust control to compensate for weakening batteries when measuring 1 . An analog meter can read positive and negative voltage by simply reversing the 8 or moving the polarity switch. A digital meter usually has an 6 for polarity on its display.Meters must be 7connected to a circuit to ensure a 9 reading. A voltmeter is always 2 the circuit or component to be measured. When measuring current, the circuit must 10 and the meter inserted 4 the circuit or component to be measured. When measuring the resistance of a component in a circuit, the voltage to the circuit must 3 and the meter placed in parallel with the component.三.Read the following passage and answer the questions.(5*8=40)RobotsRobots produce mechanical motion that,in most cases,results in manipulation or locomotion.For example,industrial robots manipulate parts or tools to perform manufacturing tasks such as material handing,welding,spray painting,or assembly;automated guided vehicles are used for transporting materials in factories and warehouses.Telerobots provide astronauts with large mainipulators for remotely performing spacecraft maintenance.Robots perform repetitive,high-precision operations 24 hours a day without fatigue.Robots on this automobile assembly line weld body parts together.The General Motors corporation uses about 16,000 robots to weld,assemble,and paint automobiles.Walking robots explore active volcanoes.Mechanical characteristics for robots include degrees of freedom of movement,size and shape of the operatingspace,stiffness and strength of the structure ,lifting capacity,velocity ,and acceleration under load.Performance measures include repeatability and accuracy of positioning,speed,and freedom from vibration.A robot is made up of sensors,actuators,and computatlonal elements(a microprocessor).Actuators for moving joints of a robot are usually electric servomotors.In the past ,larger robots were built with hydraulic actuation due to their high payload capacity and ability to work in explosion-prone environments.In the 1990s,there was a trend by the major manufacturers to use electric actuators in most of their industrial robots.A robot is an automatically controlled, reprogrammable, multipurpose, manipulating machine with several reprogrammable axes, which may be either fixed in place or mobile for use in industrial automation applications.The key words are reprogrammable and multipurpose because most single-purpose machines do not meet these two requirements. The term “reprogrammable” implies two things: The robot operates according to a written program, and this program can be rewritten to accommodate a variety of manufacturing tasks. The term “multipurpose” means that the robot can perform many different functions, depending on the program and tooling currently in use.Over the past two decades, the robot has been introduced into industry to perform many monotonous and often unsafe operations. Because robots can perform certain basic tasks more quickly and accurately than humans, they are being increasingly used in various manufacturing industries.1.What industrial robots can do for people?Industrial robots manipulate parts or tools to perform manufacturing tasks such as material handing,welding,spray painting,or assembly;automated guided vehicles are used for transporting materials in factories and warehouses.2.What are the advantages of robots?igue.Robots perform repetitive,high-precision operations 24 hours a day without fat3. What parts are made up of the robot?A robot is made up of sensors,actuators,and computatlonal elements(a microprocessor).4.What does t he term “reprogrammable” impl y?The term “reprogrammable”implies two things: The robot operates according to a written program, and this program can be rewritten to accommodate a variety of manufacturing tasks.5.Why are robots widely used over the past two decades?Because robots can perform certain basic tasks more quickly and accurately than humans, they are being increasingly used in various manufacturing industries.四.Read the following passage and t ranslate the underlined phrases and sentences into Chinese.(5*4=20)Classification of Robots1.Industrial robots vary widely in size, shape, number of axes, degrees of freedom, and design configuration. Each factor influences the dimensions of the robot’s working envelope or the volume of space within which it can move and perform its designated task. A broader classification of robots can been described as below.Fixed-and Variable-Sequence Robots. The fixed-sequence robot (also called a pick-and place robot) is programmed for a specific sequence of operations. Its movements are from point to point, and the cycle is repeated continuously. 2.The variable-sequence robot can be programmed for a specific sequence of operations but can be reprogrammed to perform another sequence of operation.3.Playback Robot. An operator leads or walks the playback robot and its end effector through the desired path. The robot memorizes and records the path and sequence of motions and can repeat them continually without any further action or guidance by the operator.Numerically Controlled Robot. 4.The numerically controlled robot is programmed and operated much like a numerically controlled machine. The robot is servo-controlled by digital data, and its sequence of movements can be changed with relative ease.5.Intelligent Robot. The intelligent robot is capable of performing some of the functions and tasks carried out by human beings. It is equipped with a variety of sensors with visual and tactile capabilities.1. 工业机器人在尺寸、形状、轴的数量、自由度、设计构型等方面广泛的变化。
济南大学自动化专业英语期末复习 1
1、In recent years the performance requirements for process plant have become increasingly difficult to satisfy.(近年来,对过程系统的性能改善需求变得越来越困难.)2、In fact, without process control it would not be possible to operate most modern processes safely and profitably (有利的), while satisfying plant quality standards.(实际上,对于大多数现代工业,要满足安全、高效,产品质量的要求,没有控制系统是不可能的)3、It is assumed that the inlet and outlet flow rates are identical (相同的) and that the liquid density ρ(rho) remains consant,that is, the temperature variations are small enough that the temperature dependence of ρcan be neglected.(假设输入和输出流量率是相等的,并且液体密度保持恒定,也就是说温度变化足够小,密度对温度的影响可以忽略不计)4、However, increased volume of tankage would be an expensive solution for an industrial plant due to the increased capital costs of the larger tank.(然而,体积增加使得开支增加,会使工厂系统的解决方案变得更加昂贵. )5、Note that in feedforward control, the controlled variable T is not measured.(注意的是,在前馈控制中,被控变量T是没有被测量的.)6、The reduction of system error is merely (仅仅) one of the many important effects that feedback may have upon a system.(减少系统误差只是反馈对系统产生的重要作用之一)7、In a practical control system, G and H are functions of frequency, so the magnitude of 1+GH may be greater than 1 in one frequency range but less than 1 in another.(在实际的控制系统中,G和H都是频率的函数,因此1+GH的幅值在一种频段下可能减小系统的增益,而在另一频段下又可能增大系统的增益)8、It can be demonstrated that one of the advantages of incorporating (包含) feedback is that it can stabilize an unstable system. (可以证明,加入反馈的好处之一是能够使不稳定的系统稳定。
15544+自动化专业英语(习题参考解答)
自动化专业英语姜书艳主编张昌华徐心皓何芳编著习题参考解答Unit 1A. Basic laws of Electrical Networks[EX.1] Comprehension1. KCL:The algebraic sum of the currents entering any node is zero.KVL:The algebraic sum of the voltage around any closed path is zero.2. Node: A point at which two or more elements have a common connection is calleda node.Branches: a single path in a network composed of one simple element and the node at each end of that element.Path: If no node was encountered more than once, then the set of nodes and elements that we have passed through is defined as a path.Loop: If the node at which we started is the same as the node on which we ended, then the path is, by definition, a closed path or a loop. a path is a particular collection of branches.3. 4, 5, We can form a path but not a loop.4. v R2=32V, V x=6V[EX.2] Translation from English to Chinese1. 如果定义具有最大连接支路数的节点为参考节点,那么得到的方程相对来说比较简单。
济南大学自动化专业英语期末复习1汉译英
•济南大学自动化专业英语期末复习1汉译英带搅拌加热器stirred-tank heater密度density比热容specific heat capacity热容heat capacity热损失heat loss负反馈negative feedback 正反馈positive feedback前馈控制策略feedforward control strategy控制器controller幅值magnitude相角phase闭环closed-loop开环open-loop 可编程逻辑控制器programmable logic controller (PLC)模型model 黑箱black-box经验模型empirical model 比例proportional比例加微分proportional plus derivative (PD)比例加积分proportional plus integral (PI)比例加积分加微分proportional plus integral plus derivative (PID)判据criteria拉氏变换Laplace transform零点zero-point 极点pole-point特征方程characteristic equation 系数parameter/coefficient 偏差变量deviation variable 比较器comparator伺服问题servo problem给定变化given changes负载变化load fluctuation/variation in load控制系统设计control system design设计模型design model炼油oil refinery 化工chemical (engineering)电力(electric) power 造纸paper (making)水泥cement 纺织textile塑料plastic 钢铁steel (iron and steel)航空航天aerospace (Aeronautics and Astronautics)再沸器reboiler流量控制flow control 液面控制level control压力控制pressure control 温度控制temperature control成分控制composition control临界增益法ultimate gain method临界周期ultimate cycling 超调overshoot热交换器heat exchanger 化学反应器chemical reactor汽化器vaporization (carburettor)英制British system 公制metric system扩散硅压力传感器diffuse silicon pressure sensor压力传感器pressure sensor差压变送器differential pressure transmitter压力传感器元件pressure sensor element波登管压力表Burdon tube piezometer (Burdon tube pressure gauges)密度density 浮力式液面计buoyancy level meter浮球float 标尺scale电位计potentiometer 导电电极conductive probe电容电极capacitive probe 超声波ultrasonic wave张力式仪表tension gauge 应变仪strain gauge荷重传感器load sensor雷诺数Reynolds number 流型flow patterns伯努利方程Bernoulli equation 流速flow rate湍流turbulent flow 黏度viscosity能量守恒energy conservatism 摩擦力friction参考点refrence point 重力加速度acc of gravity连续性方程continuity equation热电偶thermocouple 热电阻thermal resistance冰点freezing point 沸点boiling point固态solid (state) 液态liquid (state) 气态gaseous (state) 国际实用温标International practical temperature scale (IPTS) 物理原理physical principle电动势electromotive force (e.m.f)不锈钢stainless steel 接地的grounded隔离isolated控制性能control performance最终控制元件final control element控制器输出controller output阀驱动器value actuator气动pneumatic 电动electric液动hydraulic 弹簧圈spring ring不灵敏区insensitive area 死区dead zone电磁阀electric solenoid operator/value阀特性value characteristic。
自动化专业英语复习

专业英语复习(Z10101)题型:1、单词英汉互译(24*1)2、选择题(8*2)3、课文段落翻译(8*6)4、综合题(1*12):a、摘要;b、通知;c、面试对话;d、产品说明书;e、简历一、翻译(8*6)1、纯电感电压由法拉第定律定义,法拉第定律指出:电感两端的电压正比于流过电感的电流随时间的变化率。
因此可得到:U=Ldi/dt式中di/dt=电流变化率,安培/秒;L=感应系数,享利。
2、三相电压的产生三相电路可由三个频率相同在时间相位上相差120°电角度的电动势供电。
3、运算放大器像广义放大器这样的电子器件存在的一个问题就是它们的增益AU或AI取决于双端口系统(m、b、RI、Ro等)的内部特性。
器件之间参数的分散性和温度漂移给设计工作增加了难度。
4、但是,它们的缺点是在电力系统中产生谐波,对其他用户产生供电质量问题。
此外,晶闸管变换器给电力系统提供了一个滞后的低功率因数负载。
二极管整流器是最简单、可能也是最重要的电力电子电路。
5、逆变器是从一侧接受直流电压,在另一侧将其转换成交流电压的装置。
根据应用情况,交流电压和频率可以是可变的或常数。
逆变器可分成电压源型和电流源型两种。
6、永磁电机相对于常规直流电机有几个优点。
优点之一是减少了运行损耗。
永磁电机的转速特性类似于并励式直流电机的转速特性。
永磁电机的旋转方向可通过将电源线反接来实现。
7、ωm*为速度参考值。
正比于电机速度的信号可从速度传感器获得。
速度传感器的输出滤除交流波,并与速度参考值比较,速度误差被速度控制器处理,速度控制器的输出uc调整整流器的触发角α,以使实际的速度接近于参考速度。
8、闭环速度控制的另一种示意图如图1-5B-2所示。
在外环速度回路中采用内环电流控制回路。
速度控制器的输出ec用于电流控制器,为内环电流控制回路设置电流参考值Ia*。
9、对绕线式转子电机而言,转子绕组与定子绕组类似,但鼠笼式电机的转子具有鼠笼状结构,并且有两个短路环。
(完整word版)自动化专业英语考试整理版
翻译P.1The voltage across a pure inductor is defined by Faraday’law,which states that the voltage across the inductor is proportional to the rate of change with time of the current through the inductor.thus we have U=Ldi/dt.纯电感电压由法拉第定律定义,法拉第定律指出:电感两头的电压正比于流过电感的电流随时间的变化率。
所以可获取:U=Ldi/dt式中di/dt = 电流变化率,安培/秒;L =感觉系数,享利。
P.3A three-phase electric circuit is energized by three alternating emfs of the same frequency and differing in time phase by 120 electrical degrees .三相电压的产生三相电路可由三个频次同样在时间相位上相差120°电角度的电动势供电。
P.9One problem with electronic devices corresponding to the generalized amplifiers is that the gains,AU or AI ,depend upon internal properties of two-port system( ).This makes design difficult since these parameters usually vary from device to device ,as well as temperature .运算放大器像广义放大器这样的电子器件存在的一个问题就是它们的增益 AU 或 AI 取决于双端口系统 (m、b、RI、Ro 等)的内部特征。
自动化专业英语考试答案
单词:20分,10个二。
句子翻译:40分,8题1:P2A common method of analyzing an electrical network is mesh or loop analysis.The fundamental law that is applied in this method is Kirchhoff's first law,which states that the algebraic sun of thevoltages around a closed loop is0,or,in any closed loop,the sum of the voltage rises must equal the sum of the voltage drops.Mesh analysis consists of assuming that currents~termed loopcurrents~flow in each loop of a network,algebraically summing the voltage drops around each loop,and setting each sum equal to0.分析电网络的一般方法是网孔分析法或回路分析法。
应用于此方法的基本定律是基尔霍夫第一定律,基尔霍夫第一定律指出:一个闭合回路中的电压代数和为0,换句话说,任一闭合回路中的电压升等于电压降。
网孔分析指的是:假设有一个电流——即所谓的回路电流——流过电路中的每一个回路,求每一个回路电压降的代数和,并令其为零。
2: P17Alternatively,suppose that there had been attached to each pilot’s seat an electronic device that pr ovided an output voltage which is V1when the seat is occupied and V2when the seat is not occup ied.Let us attach the designation“true”to the voltage level V2so that the level V1is“false”.Let us further construct an electric circuit with two sets of input terminals and one set of output termi nals.The circuit is to have the property that the output voltage will be V2if and only if both inputs ,i.e.,one input AND simultaneously the other,are at the level V2.Otherwise the output is V1 Finally let us connect the inputs to the devices on the chairs of pilots A and B and arrange that an alarm bell,connected to the output Z,respond when the output is V2(“true”)and not otherwise. We have then constructed a circuit which performs the AND operation and is capable of making the logical deduction that the plane is unpiloted when,indeed,both pilots leave the cockpit换句话说,假设每一位飞行员座位下面有一个电子装置,当座位上有人时,其输出电压为V1,当座位上无人时,其输出电压为V2。
电气工程及其自动化-自动化-专业英语重点-考试题

四川理工的学弟学妹们,特别是自电学院的兄弟伙们,专业英语难过啊,是否需要这个呢?我的淘宝店铺:信诚悦购包你80分电气自动化、自动化专业英语课堂笔记一.短语互译(10个,每个2分,共20分)1、DC/AC:direct/alternating current.(直流/交流)2、a good rule of thumb.(根据经验)3、step-up/step-down transformer(升压/降压变压器)autotransformer(自耦变压器)4、gate-turn-off thyristor [θai'ristə](门极可关断晶闸管)5、silicon-controlled rectifier(可控硅整流器)6、forward voltage drop(正向压降)7、reverse breakdown voltage(反向击穿电压)8、reverse leakage current(反向漏电流)9、peak reverse voltage(反向峰值电压)10、forced commutation(强制换流)11、three-phase ac squirrel cage induction motor(三相交流鼠笼式感应电机)12、AM/FM :amplitude/frequency modulation(调幅/调频)13、active/passive filter(有源/无源滤波器)14、bistable circuit(双稳电路)15、flip-flop(触发器)16、emf:electromotive [i,lektrəu'məutiv] force(电动势)17、magnetic flux(磁通)18、magnetizing current(磁化电流/励磁电流)19、general-purpose relay(通用继电器)20、solid-state relay(固态继电器)21、time constant(时间常数)22、ADC:analog-to-digital conversion (模数转换器)二、汉译英(5-6个,共30分,2个课外)1、通过互联网进行商业交易,其便利性和速度是推动电子商品快速发展的主要因素。
电气工程及其自动化专业英语复习
1、目前,煤仍然就是凝汽式电厂最长用得能源。
At present coal is the most common food of a steam power plant、2、为防止人畜触电,高压电一般采用架空线输送。
High voltage current is usually carried by overhead wire system so as to prevent living things being electrocuted、3、这座由电子计算机控制得核电站将向全市供电。
This nuclear power plant which is computer-controlled will serve the entire city、4、电学与电子学实际上就是唯一难以分开得,二者相互渗透,相互联系。
Electricity and electronics are really indivisible, each forming part of the other、5、元件技术中起主要作用得就是半导体元件。
The major contributors in component technology have been in the sosemiconductor components、6、电压,电流与电阻这三个因素就是相互关联得。
The factors, voltage, current and resistance , are related to each other 、7、电动机与发电机就就是以磁与电这二者之间得关系为基础得Based upon the relationship between magnetism and electricity are motors and generators8,随着电气工程学得发展,电力能被输送到非常遥远得地方去。
With the development of electrical engineering , power can be transmitted over long distance、9每时每刻,能量都在由一种形式变成另一种形式。
《 自动化专业英语》试卷A
Ⅰ. Vocabulary(词汇)(6分)
1.Translate the following words and expressions into Chinese.(将下列词组翻译为汉语,共3分)
1)Transient response:瞬态响应
2)Critically damped:临界阻尼
3)Artificial neural networks:人工神经网络
Thank you very much for your time and attention.
共2页第2页
2.Translate the following words and expressions into English.(将下列词组翻译为英语。共3分)
1)集成电路:Integrated circuit
2)比例积分微分控制器(写全称):Proportional - integral - derivative controller
计算机仿真作为一种广泛应用于科学研究和工程设计强大的分析工具表现出无可比拟的优势。
2)Since complete state controllability does not necessarily mean complete control of the output, and vice versa, complete output ty is separately defined in the same manner.
由于状态完全可控性并不一定意味着输出的完全能控,反过来说,输出完全可控性用相同的方法
单
独定义。
3)Ethernet employs a CSMA with collision detection protocol, when there is a collision, all of the affected nodes will back off, wait a random time, and retransmit.
自动化专业英语复习

infra-acoustic
infrahuman
Prefixes (8)
• in-:
非,无
不准确的
不稳定的 不变的 无机的
inaccurate
instability invariable inorganic
• micro-:小,微
microcomputer
微型计算机 微生物 显微镜
耐热的 带宽 流线型的 基岩 高耗电的 太空行走 水冷的 液态 阻燃的 网状物
1. 2. 3. 4. 5. 6. 7. 8. 9. 10.
heatband stream bed power space water liquid firenet
A. B. C. D. E. F. G. H. I. J.
• di-:二;二倍;二重;双;
dioxide
diode
二极管
三角形 三轮车
• tri-:三;三倍;
triangle
tricycle
quadri-: 四 hepta-: 七
quint-: 五
hexa-:六
Prefixes (5)
• deci-:
十分之一
分贝 分米
decibel (db)
geoscience
Prefixes (7)
• hydro-:
水;氢化的
水文学
碳氢化合物 水生生物学 水雷,鱼雷
hydrology
hydrocarbon hydrobiology hydrobomb
• Infra-:在下(部);亚,低,外
infrared
红外线(的) 亚声的,亚音频的 类人动物
自动专业英语(仅供复习)
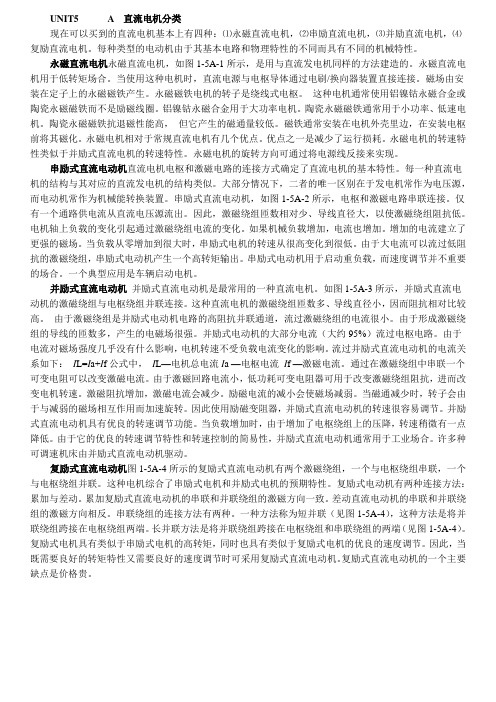
UNIT5 A 直流电机分类现在可以买到的直流电机基本上有四种:⑴永磁直流电机,⑵串励直流电机,⑶并励直流电机,⑷复励直流电机。
每种类型的电动机由于其基本电路和物理特性的不同而具有不同的机械特性。
永磁直流电机永磁直流电机,如图1-5A-1所示,是用与直流发电机同样的方法建造的。
永磁直流电机用于低转矩场合。
当使用这种电机时,直流电源与电枢导体通过电刷/换向器装置直接连接。
磁场由安装在定子上的永磁磁铁产生。
永磁磁铁电机的转子是绕线式电枢。
这种电机通常使用铝镍钴永磁合金或陶瓷永磁磁铁而不是励磁线圈。
铝镍钴永磁合金用于大功率电机。
陶瓷永磁磁铁通常用于小功率、低速电机。
陶瓷永磁磁铁抗退磁性能高,但它产生的磁通量较低。
磁铁通常安装在电机外壳里边,在安装电枢前将其磁化。
永磁电机相对于常规直流电机有几个优点。
优点之一是减少了运行损耗。
永磁电机的转速特性类似于并励式直流电机的转速特性。
永磁电机的旋转方向可通过将电源线反接来实现。
串励式直流电动机直流电机电枢和激磁电路的连接方式确定了直流电机的基本特性。
每一种直流电机的结构与其对应的直流发电机的结构类似。
大部分情况下,二者的唯一区别在于发电机常作为电压源,而电动机常作为机械能转换装置。
串励式直流电动机,如图1-5A-2所示,电枢和激磁电路串联连接。
仅有一个通路供电流从直流电压源流出。
因此,激磁绕组匝数相对少、导线直径大,以使激磁绕组阻抗低。
电机轴上负载的变化引起通过激磁绕组电流的变化。
如果机械负载增加,电流也增加。
增加的电流建立了更强的磁场。
当负载从零增加到很大时,串励式电机的转速从很高变化到很低。
由于大电流可以流过低阻抗的激磁绕组,串励式电动机产生一个高转矩输出。
串励式电动机用于启动重负载,而速度调节并不重要的场合。
一个典型应用是车辆启动电机。
并励式直流电动机并励式直流电动机是最常用的一种直流电机。
如图1-5A-3所示,并励式直流电动机的激磁绕组与电枢绕组并联连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ⅰ. Vocabulary(词汇)(40分)1. Fill in the blanks with the corresponding English abbreviations.(根据汉语写出相应的英语缩写。
每题1分,共10分)2. Translate the following words and expressions into Chinese.(写出下列词组的汉语。
每题1分,共10分,)3. Translate the following words and expressions into English.(写出下列词组的英语。
每题2分,共20分)Ⅱ.Comprehension(阅读理解)(10分)4. Tell whether the following statements are true(T) or false(F) according to the passage.(根据上文的内容判断下列句子的正误。
10分)Ⅲ. Translation.翻译(50分)5. Translate the following sentences into Chinese.(将下列句子翻译成汉语。
共15分)6. Translate the following sentences into English.(将下列句子翻译成英语。
共15分)7. Translate the following paragraph into Chinese.(将下段文章翻译成汉/英语.共10/20分) abbreviation1. 半导体可控整流器,可控硅semiconductor controlled rectifier(SCR)2. 比例积分微分控制器,PID 控制器proportional plus integral plus derivative controller3. 不间断电源uninterruptible power supply(UPS)4. 场效应晶体管field effect transistor(FET)5. 多输入多输出控制系统multiple input multiple output control system(MIMO)6. 单输入单输出控制系统single input single output control system(SISO)7. 电流源逆变器current-source inverters(CSI)8. 电压源逆变器voltage-source inverters(VSI)9. 短期记忆short term memory(SIM)10. 方法库way base(WB)11. 方法库管理系统way base management system (WBMS)12. 光符阅读机(OCR) optical character reader13. 集成电路芯片IC(integrated circuit) chip14. 交流电 alternating current(AC)15. 可编程控制PLC(Programmable Logic Controller)16. 脉宽调制 pluse-width modulation (PWM)17. 气关式 air-to-close(AC)18. 气开式 air-to-open(AO)19. 人工智能 artificial intelligence(AI)20. 直接数字控制,direct digital control (DDC)21. 运算放大器 operational Amplifier (OA)Vocabulary-11. Automatic control 自动控制2. Dynamic system 动态系统3. Differential equation 微分方程4. Frequency response methods 频率响应方法5. Root-locus methods 根轨迹的方法6. Feedback control system 反馈控制系统7. Optimal control 最优控制Vocabulary-21. Forcing function2. Mathematical model3. First-order differential equation4. Transient- response analysis5. Frequency- response analysis6. Ordinary differential equation7. Partial differential equation8. The principle of superposition9. Linear time-invariant /time-varying system10. Nonlinear systemVocabulary-31. Control action2. Two-position or on off controllers3. Actuating error signal4. Closed-loop system5. Reference input signal6. Self-operated controllers7. Set point8. Flow rate9. Actuating element10. Differential gapVocabulary-41. Laplace transform2. rate control 速率控制,微分控制3. Reset rate 复位率4. transient period 过渡周期5. feedback path 反馈通道6. second-order 二阶的7. block diagram 方块图8. load disturbance 负荷(负载)扰动9. negative feedback 负反馈10. Fundamental principle 基本原则Vocabulary-51. scompensation technique 补偿技术、校正方法2. Performance specification 性能规范3. time-domain performance measures 时域性能指标4. Rise/settling time 上升/调整时间5. phase/ gain margin相位/增益裕度6. trial-and-error approach 逐次逼近法7. Adjust parameter setting 调整参数设置8. steady-state behavior 稳态特性9. series compensation and feedback(or parallel) compensation串联校正和反馈(并联)校正10. lag-lead compensator 滞后/超前校正装置基于GPS/GPRS 的公交车自动报站系统设计•摘要:结合GPS定位,对车辆的状态信息(位置、速度等)进行实时采集及分析,当车辆到达预定位置时,实现公交车的自动报站功能;通过GPRS网络,将公交车的状态信息及时传输到公交监控调度中心,然后通过中心上位机软件的操作,实现对公交车的监控调度、信息更新的功能.采用SD卡存储多条线路信息及MP3语音文件,便于公交车更换公交线路,同时实现高品质语音信息的播放.•关键词:自动报站;GPS;GPRS;信息更新;监控调度•Design of GPS/GPRS bus stop automatic announcerDesign of Automatic Station Report System for Bus Based on GPS/•Abstract: Combining GPS positioning technology, the bus status (information location, speed, etc.) in real-time are collected and analyzed. When the bus is scheduled to arrive at the location, the automatic station report functions is realized. Through the GPRS network, necessary bus status information should be transmitted to the bus monitor dispatching center timely, and then through the center of the operation of PC software, to achieve the function of the monitoring, scheduling and updating information. SD card is used to memorize the information of a number of lines and MP3 audio files, it is facilitated to replace bus lines , and at the same time high-quality voice information play is realized.•Keywords: automatic station report; GPS; GPRS; information updating; monitoring; dispatching 基于μPD78F0034单片机的出租车计费器的设计与实现•摘要:介绍了基于μPD78F0034单片机和模块式结构的出租车计费器的软件和硬件设计方法,讨论了μPD78F0034单片机的主要特点;介绍了该单片机和PC机串行通信的硬件连接方法;同时给出了采用单双信号防作弊技术来防止计费器作弊的具体实现方法。
•关键词:出租车计费器;μPD78F003;串行通信;防作弊技术•Abstract:The hardware and software design method of Taxi-meter based on μPD78F0034 microcontroller and module structure are introduced in this paper. The main feature of microcontroller are discussed, and the hardware connection of the serial communication between the microcontroller and PC are also given. The anti-tampering technology for single and the double –signal in taxi-meter is proposed here.•Keywords: Taxi meter; μPD78F0034; Serial communication; Anti-tampering technology• (1) In 1922 Minorsky worked on automatic controllers for steering ships and showedhow stability could be determined from the differential equations describing the system.1922年,迈那斯基研究用于驾驶船舶的自动控制器,并提出根据描述系统的微分方程可以决定定系统的稳定性。