系统仿真结课作业
系统工程仿真作业

基于Anylogic的系统工程模型仿真系统仿真(systemsimulation),就是根据系统分析的目的,在分析系统各要素性质及其相互关系的基础上,建立能描述系统结构或行为过程的、且具有一定逻辑关系或数量关系的仿真模型,据此进行试验或定量分析,以获得正确决策所需的各种信息。
仿真是一种对系统问题求数值解的计算技术。
尤其当系统无法通过建立数学模型求解时,仿真技术能有效地来处理。
也是一种人为的试验手段。
它和现实系统实验的差别在于,仿真实验不是依据实际环境,而是作为实际系统映象的系统模型以及相应的“人造”环境下进行的。
这是仿真的主要功能。
仿真可以比较真实地描述系统的运行、演变及其发展过程。
仿真的过程也是实验的过程,而且还是系统地收集和积累信息的过程。
尤其是对一些复杂的随机问题,应用仿真技术是提供所需信息的唯一令人满意的方法。
对一些难以建立物理模型和数学模型的对象系统,可通过仿真模型来顺利地解决预测、分析和评价等系统问题。
通过系统仿真,可以把一个复杂系统降阶成若干子系统以便于分析。
通过系统仿真,能启发新的思想或产生新的策略,还能暴露出原系统中隐藏着的一些问题,以便及时解决系统仿真的基本方法是建立系统的结构模型和量化分析模型,并将其转换为适合在计算机上编程的仿真模型,然后对模型进行仿真实验。
由于连续系统和离散(事件)系统的数学模型有很大差别,所以系统仿真方法基本上分为两大类,即连续系统仿真方法和离散系统仿真方法。
在以上两类基本方法的基础上,还有一些用于系统(特别是社会经济和管理系统)仿真的特殊而有效的方法,如系统动力学方法、蒙特卡洛法等。
系统动力学方法通过建立系统动力学模型(流图等)、利用DYNAMO仿真语言在计算机上实现对真实系统的仿真实验,从而研究系统结构、功能和行为之间的动态关系。
AnyLogic,是一款应用广泛的,对离散,连续和混合系统建模和仿真的工具。
它的应用领域包括:控制系统,交通,动态系统,制造业,供给线,后勤部门,电信,网络,计算机系统,机械,化工,污水处理,军事,教育等等。
东华大学 系统建模作业2012
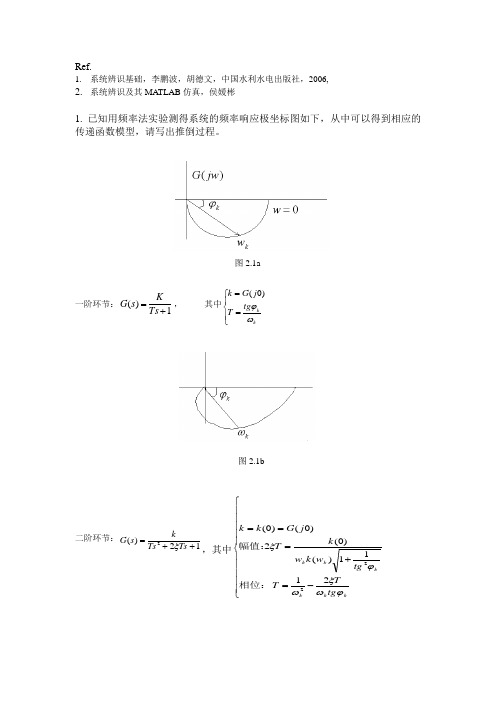
Ref.1. 系统辨识基础,李鹏波,胡德文,中国水利水电出版社,2006,2. 系统辨识及其MATLAB 仿真,侯媛彬1. 已知用频率法实验测得系统的频率响应极坐标图如下,从中可以得到相应的传递函数模型,请写出推倒过程。
图2.1a一阶环节:1)(+=Ts Ks G , 其中⎪⎩⎪⎨⎧==k k tg T j G k ωϕ)0(二阶环节:12)(2++=Ts Ts k s G ξ,其中⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧-=+===k k k k k k tg TT tg w k w k T j G k k ϕωξωϕξ2111)()0(2)0()0(22相位:幅值:图2.1a一阶延迟环节:se Ts k s G τ-+=1)(,其中⎪⎪⎪⎩⎪⎪⎪⎨⎧===k dk k k tg T k k ωϕτωϕ)()0(2. 系统真实模型如下图所示,试用增广递推最小二乘法辨识系统模型。
)(k v )(k y ⊕实验:)(k ε是均值为0,方差为1的正态分布近似白噪声序列,由计算机随机数产生,噪声强度系数取为0.9。
)(k u 为输入序列,采用m 序列,幅度为2。
选用如下模型结构:)1()()2()1()2()1()(12121-++-+-=-+-+k d k k u b k u b k y a k y a k y εε.图2.1cMatlab编程实现增广递推最小二乘法,其中初始条件取)1,5(10,1030^5560ones I P -⨯==θ 。
要求:写出程序及注释,并给出结果:1)a1, a2, b1, b2, d1五个参数的辨识结果;2)用图形显示五个参数的收敛过程。
3. 如图3-1所示采用气体燃料的常压加热炉,炉膛温度受所加燃料量的影响,由于气体燃料流量受阀门压力的控制,取阀门压力作为炉温控制系统的输入控制变量。
试用相关分析法建立系统模型,获得燃料量与炉温之间的动态关系。
实验:在热稳定工况(832度)的基础上 ,在阀门压力稳定值上再附加一人工扰动,即幅度为 2/03.0cm kg ± 的M 序列压力信号。
机械系统设计仿真大作业

《机械系统设计仿真》大作业一、简答题(30分,每题5分)1、机械系统设计的基本问题是什么?答:机械系统设计的基本问题是机构的综合、运动学和动力学分析与设计。
2、求解动力学的两个基本问题是什么?答:两个基本问题是:一、动力学逆问题,己知运动求力;二、动力学正问题,已知力求运动。
3、简述牛顿—欧拉法的解题步骤。
答:采用牛顿—欧拉方法的基本步骤是先将系统的约束解除,分割成若干个单个的刚体或质点,然后对每个刚体或质点应用牛顿第二定律和欧拉动力学方程一一建立运动微分方程。
4、简述主工具箱上部的12个图标的功能,如图1所示。
:5、鼠标的右键操作主要应用于哪些场合?答:使用鼠标右键的场合主要有:1)显示建模过程中屏幕亡的各种对象的弹出式菜单,例如:构件、标记、约束、运动、力等。
2)在各种输入对话框中的参数文本输入栏,显示输入参数的弹出式菜单。
3)在后处理过程中,显示曲线图中各种对象的弹出式菜单,例如:曲线、标题、坐标、符号标记等。
4)在主工具箱、快捷工具栏等有工具图标集的场合,显示所选择的工具图标集的所有图标命令。
图16、解释几何样机的参数化建模,并指出ADAMS /View 提供的4种参数化建模方法。
答:1.参数化建模是将样机的建模参数设置为可以改变的变量、表达式和函数,在分析过程中,只需改变样机模型中有关参数值,程序就可以自动地更新整个样机模型,获得新的样机模型,以便预先设置可变参数,自动地进行一系列的仿真分析,研究一个或多个参数变化对样机性能的影响,获得最危险的操作工况以及最优化的设计结果。
2.ADAMS /View 提供了4种参数化建模方法:使用参数表达式、参数化点坐标、关联移动和使用设计变量。
二、图2所示为一单摆,质量为m ,摆长为l 。
设摆的悬点P 沿x 轴按x p =Asin ωt 运动,讨论系统的自由度,并写出约束方程。
(10分) 解:M 、P 共有2×N =4个坐标,系统满足3个完整约束X P =Asin ωt Y P =0(X m -Y p )2+Y m 2=L2该系统没有非完整约束,因此是一个完整系统,其自由度数为4-3=1。
系统仿真 作业
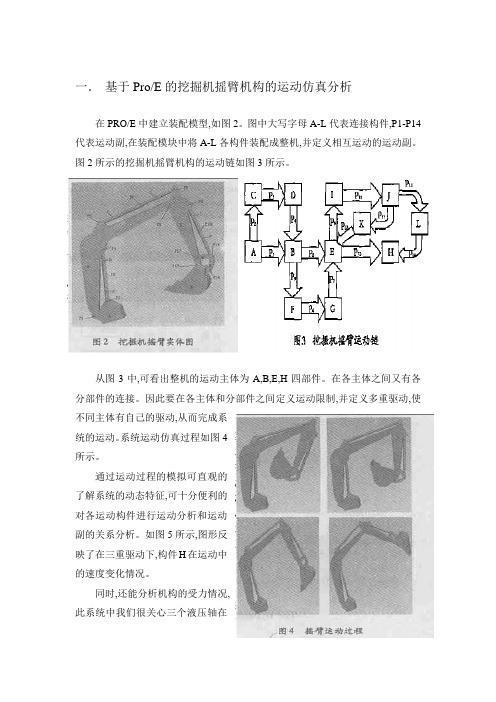
一.基于Pro/E的挖掘机摇臂机构的运动仿真分析在PRO/E中建立装配模型,如图2。
图中大写字母A-L代表连接构件,P1-P14代表运动副,在装配模块中将A-L各构件装配成整机,并定义相互运动的运动副。
图2所示的挖掘机摇臂机构的运动链如图3所示。
从图3中,可看出整机的运动主体为A,B,E,H四部件。
在各主体之间又有各分部件的连接。
因此要在各主体和分部件之间定义运动限制,并定义多重驱动,使不同主体有自己的驱动,从而完成系统的运动。
系统运动仿真过程如图4所示。
通过运动过程的模拟可直观的了解系统的动态特征,可十分便利的对各运动构件进行运动分析和运动副的关系分析。
如图5所示,图形反映了在三重驱动下,构件H在运动中的速度变化情况。
同时,还能分析机构的受力情况,此系统中我们很关心三个液压轴在摇臂运动中的受力情况,通过设定运动结构分析,可测量出需要的参数变化曲线,如图6所示,图形反映了三个液压轴的受力情况。
二. 基于Simulink 的液压起升机构仿真研究1 起升机构的SimMechanics 模型1.1 仿真框图绘制起升机构结构简图如图 1 所示,主要有车架、起升油缸、负载等组成。
利用SimMechanics 中提供的模块,构建系统的Simulink 模型如图2 所示,其中,车架可以认为固定不动,用Ground 模块来表示,负载认为是一个旋转刚体,用Body 表示,油缸的缸体和活塞分别当作一个刚体用Body表示,负载与车架、活塞杆与负载、缸体与车架间的接头均为单自由度的旋转副,液压缸的缸体和活塞杆间用圆柱副或者单自由度的移动副连接。
1.2 模块参数设置完成模型的连接之后,需要进行参数设置。
规定构件的坐标方向,该机构可简化为平面的运动,每个坐标轴的旋转方向遵从右手法则,从纸面向上的方向为z 坐标轴的正方向。
为简单起见,图中转动副的坐标系均选择为世界坐标(World),根据实际系统设置各个刚体两端坐标、质量、转动惯量、质心位置坐标等参数。
系统仿真结课论文
《生产系统仿真》课程设计实验报告学生姓名:周秀影学院:经济管理学院专业:工业工程学号: 1102103362014 年11月2014-2015学年第一学期《生产系统仿真》设计实验要求一、设计实验目的熟悉Flexsim建模步骤;学习逻辑系统的建模方法;学习查看Flexsim的仿真结果,并在认真分析的基础上,发现问题,提出解决方案,进行对比分析。
通过实际建立仿真模型深刻认识和理解仿真的基本概念;初步具备数据分析、探索能力。
二、设计实验题目:生产加工系统仿真假设有两种不同的零件需要在不同的机器上加工,加工完毕后需要在同一机器上检验是否合格。
若合格则产品直接入合格品库;对不合格的两种零件,需要在另外一台机器上进行再加工,经过再加工后,若合格则入合格品库,若产品不合格,则要报废处理。
2、Part A、Part B分别在不同机器上加工,Part A的加工时间服从三角分布Tria(1,8,4);对Part B的加工时间也服从三角分布Tria(3,10,5);3、两种零件第一次加工完成后在同一台机器上检查,但检查时间不同。
Part A的检查时间服从三角分布Tria(1,3,4);对Part B的检查时间服从均匀分unif(4,6);4、经过第一次检查,合格率达50%,不合格为50%;5、两种零件经第一次检查后的不合格品的再加工是在另外的机器上进行的,两种零件再加工的时间服从相同的负指数分布Expo(3)。
6、再加工后,合格率达80%,不合格为20%;参数设置的具体步骤:1.2.34. 5.6.二、设计实验要求(1)采用Flexsim 6.0建立仿真模型,详细描述建模过程中每一步骤和相应的参数设置以及代码编写过程,并截取图片;(2)仿真实验时间为“学生学号*1000”秒;(3)根据输出结果对系统进行分析,分别计算两种零件在系统中的平均等待时间和平均逗留时间、平均队列长度和最大等待数量,等待检验队列的最大等待时间和平均时间、最大等待数量和平均数量,进入系统的个数和离开系统的个数;由系统仿真模型得出的数据可看出,暂存区5,暂存区10,暂存区11均留置物品较多,且存储量较小,处理器时间能改进尽量改进到最小。
系统建模与仿真仿真作业结果

Simulink 仿真根据以上的分析论证,将已求得的个函数参数带入动态结构图中,初步得到图3动态结构图图3根据理论得到的各参数设计后可得到理论设计条件下输出转速曲线图4可以清楚地看出,输出转速有很大的超调最大可达84.1%,调整时长为2.65s 之久,这是我们所不能接受的速度调节器的设计参数与实际调试结果相差比较大,使系统对负载扰动引起的动态速降(升)缺乏有效的抑制能力,存在起动和制动过程中超调量大,突加(减)负载时,动态速降(升)大等缺点。
所以,我们对ACR和ASR的参数进行整定,特别是速度控制器的参数。
我+ 1们就对其作出了适当的调整,将速度控制器的传递函数改成,将电流调节器的传递函数改为当然,这是需要时间和经验的。
校正后的动态结构图如图5所示校正后的输出转速曲线如图6所示|Time cffeel 0图六电流环跟随性能仿真实验如上文所述:电流环的作用就是保持电枢电流在动态过程中不超过允许值,在突加控制作用时不希望有超调,或者超调量越小越好。
这就需要我们对电流环的跟随性能加以分析。
将电流环从系统中分离出来(将电枢电压对电流环影响看成是扰动)。
电流环模型如图7所示:Transfer Fcn1图7通过如下命令可以得到电流环的bode图和nyquist图以及电流环的单位阶跃响应。
[nu m,de n]=li nm od('curre nt_loop')sys=tf( nu m,de n)figure(1)margi n(sys)[mag,phase,w]=bode(sys);[gm,pm,wcg,wcp]=margi n( mag,phase,w)Figure(2)Nyquist(sys)Figure©)Step(sys)我们还可以得到以下的数据gm = 4.2925 pm =47.7281 wcg = 345.3056cp = 164.6317剪切频率3 c=164.6317rad/s;相角相对裕度S = 47.7281 °; -n穿越频率3g=345.3056rad/s 幅值相对裕度Lh=20lg (4.2925) =12.65dB27t 01 上2 」 J A 10 10 10 10 10 F 怛OuerKV HQd^k 图8电流环的bode 图图10电流环的单位阶跃响应⑥s co«3 ■….呂畫rl u 丄图9电流环的nyquist 图0D O H Di 心4甬mGm - 12 7d0 欄 ratfs) Rm _ 47 5 de 。
系统仿真结课设计1
MATLAB在自动控制系统中的应用与仿真摘要:“自动控制原理”课程涉及到控制系统的模型建立、系统分析、系统设计的基础理论。
针对自动控制原理中的时域分析法的问题,介绍了使用Matlab中的simulink模块,通过对实例进行仿真分析,获得满意的结果。
关键词:自动控制原理; Matlab;Simulink;仿真The Application of Matlab in the course of Automatic Control TheoryAbstrac:“The automatic control principle”curriculum relates to basic theory of control system model building,system analysis and system design .The method of the model simulation by Simulink and Matlab function is introuduced in this paper,the model is simulated by the real example and the satisfied result is gained.key words:Auto –control system;Matlab;Simulink;simulation 1、引言:近年来,随着计算机技术和仿真软件的不断发展和完善,仿真软件逐渐渗透到自动控制原理课程,在学习自动控制原理时,利用MATLAB语言及其工具箱来解决控制系统的分析问题,包括线性系统的时域分析、频域分析、根轨迹分析和系统的稳定性分析,为系统的仿真和设计做准备。
MATLAB广泛地应用于工程设计的各个领域,如电子、通信等领域,它已经成为国际上最流行的计算机仿真软件设计工具。
现在的MATLAB不仅仅是一个矩阵实验室,而是一种实用的、功能强大的、不断更新的高级计算机编程语言。
matlab结业作业
《Matlab/Simulink 与控制系统仿真》结业作业一、必做题Matlab学习心得体会:本学期我们新开了一门MATLAB/Simulink与控制系统仿真的课程,虽说是这个学期才开始学习,但是我们却对MATLAB这个软件的基本使用一点都不陌生。
而本学期的专门学习,更让我获益匪浅。
第一部分是利用MATLAB函数来对控制系统进行分析。
①例如要求取一个系统的阶跃响应时,我就可以调用MATLAB中的step函数②MATLAB在稳定性分析应用时,通过直接求根函数roots来判定系统的稳定性③在利用MATLAB分析系统的根轨迹时,使用rlocus函数来求取根轨迹图,使用pzmap函数求取系统的传递函数零极点④计算给定一组根的根轨迹增益函数 [k,poles]=rlocufind(sys);[k,poles]=rlocfind(sys,p)⑤MATLAB在稳定性分析应用时,也常通过使用用于计算系统稳定裕度的margin函数来完成,它可以从频率响应数据中计算出幅值裕度、相角裕度以及对应的频率⑥对于使用MATLAB来对系统进行频域响应的分析,又往往提供了绘制函数nyguist和bode来绘制系统的奈奎斯特曲线图和伯德图⑦其他:grid%添加栅格 hold on%保持,继续在原图绘画 title%添加标题legend(x,y)%添加文字标注 gyext('TEXT')%在任意可选位置添加文字信息 xlabel(x,y);ylabel(x,y)%添加坐标轴分割图形窗口 subplot(1,2,1)%分割为一行两列,并即将绘制第一个第二部分是利用MATLAB的Simulink模块来对控制系统进行建模仿真。
Simulink是一个对动态系统(包括连续系统、离散系统和混合系统)进行建模、仿真和综合分析的集成软件包,是MATLAB的一个附加组件,其特点是模块化操作、易学易用,而且能够使用MATLAB提供的丰富的仿真资源。
物流系统仿真作业参考答案.docx

有3类联结:事件联结、活动联结和函数联结.agent与agent之间可通过事件联结建立通信通道;agent与对象之间通过事件联结或活动联结建立联系.事件联结是一种单向通道,agent发出事件后,继续从事自己的任务,至于这一事件能不能通过事件接口传出去,事件联结将它传给谁,事件的产生者是不关心的•事件联结是一种异步通信通道. 函数联结是一种双向通道,agent发出事件(函数调用)后,处于等待状态,直到这一函数调用返回结果,才继续自己的任务.函数联结可以看成是一类特殊的事件联结.活动联结把活动的施者和活动的受者联系起来解:(1)划分区间,计算gi使用Excel绘制直方图根据分布辨识,数据服从正态分布。
进彳丁点估计 计算其均值:X(n) n耳一n=87 带入,求得 J (87) = 6. 103 n52(T ?)=耳 ------- 7? - 1所以,由点估计,可以确定该库存系统工件发送的分布为正态分布, 其概率密度函数为:方差 =5. 675 (A--6. 103)2_____ 1 _____ e 2(2. 382)2』2兀 x 2. 382(2)提出假设: HO :随机变量X 满足正态分布 H1:随机变量X 不满足正态分布 利用上述概率密度函数计算出整数取值为1-12时的概率 p (o ) Pd)P (2)p(3)P ⑷p(5)P (6)P (7)p(8)p(9)P (10)P(H)pg0.0052 0.0109 0.0264 0.0539 0.0923 0.1330 0.1611 0.1640 0.1403 0.1009 0.0610 0.0310 0.0133连续正态分布的概率质量区间观测到的数目化预计的数目npi(N厂昭)2Wi:0, 3) 6 2.2972 5.9708 [3,4) 6 4.6851 0.3664 [4, 5) 10 8.0311 0.4832 [5,6) 12 11.5718 0.0159 [6, 7) 18 14.0151 1.1326 [7,8) 10 14.2680 1.2767 [8,9)10 12.2098 0.3987 [9, 13)158.78260.4842检测统计量的计算过程2 (N j-np j)统计量力o —工n p- 10.1286,显著水平a=0.05下,正态分布有2个参数,贝分布的自由度为k-s-1= &2-1=5查表得关键值Zo.O5,5=11-1 -因此在显著水平取0=0.05时,因为加< Zo.05,5 '所以接受原假设,即样本数据服从所假定的正态分布。
计算机仿真技术课程结业报告
二 〇一 四 年 十一 月计算机仿真技术课程结业报告学 号:201210203033学生姓名学 院:信息工程学院 班 级:电子12-2实验四 离散时间LTI 系统的时域分析编程练习1. 试用MATLAB 命令求解以下离散时间系统的单位取样响应。
(1))1()()2()1(4)(3-+=-+-+n x n x n y n y n y (2))()2(10)1(6)(25n x n y n y n y =-+-+2. 已知某系统的单位取样响应为()()()[]10)87(--=n u n u n h n ,试用MATLAB 求当激励信号为)5()()(--=n u n u n x 时,系统的零状态响应。
答案:a=[3 4 1];b=[1 1];n=0:30;impz(b,a,30),grid ontitl('系统单位取样响应h(n)')a=[2.5 6 10];b=[1];n=0:30;impz(b,a,30),grid ontitl('系统单位取样响应h(n)')nx=-1:5; %x(n)向量显示范围(添加了附加的零值)nh=-2:10; %h(n)向量显示范围(添加了附加的零值)x=uDT(nx)- uDT (nx-5);h=(7/8).^nh.*( uDT (nh)- uDT (nh-10));y=conv(x,h);ny1=nx(1)+nh(1); %卷积结果起始点%卷积结果长度为两序列长度之和减1,即0到(length(nx)+length(nh)-2) %因此卷积结果的时间范围是将上述长度加上起始点的偏移值ny=ny1+(0:(length(nx)+length(nh)-2));subplot(311)stem(nx,x,'fill'),grid onxlabel('n'),title('x(n)')axis([-4 16 0 3])subplot(312)stem(nh,h','fill'),grid onxlabel('n'),title('h(n)')axis([-4 16 0 3])subplot(313)stem(ny,y,'fill'),grid onxlabel('n'),title('y(n)=x(n)*h(n)')axis([-4 16 0 5])在MATLAB中,冲激序列可以通过编写uDT.m文件来实现,即function y=uDT(n)y=n>=0; %当参数为非负时输出1调用该函数时n也同样必须为整数或整数向量。
硕士生结课大作业-系统建模与仿真

5
4 4
5
4 5 表.3:产品数量
4
3 3
4
5 4
6
4 1
总数(个) 产品1 产品2 产品3 1000 500 200
பைடு நூலகம்
每批量(个) 10 5 4
时间间隔(min) 10 8 6
要求: (1)建立上述多产品生产系统的仿真模型 (2)查看系统运行情况报告。 (3)如存在瓶颈,请给出改善方案
系统建模与仿真
管理科学与工程学院 工业工程系
硕士生结课作业题目 多产品生产系统建模与仿真
背景及相关数据 一个工厂有 5个不同的车间(普通车间,钻床车间,铣床车
间,磨床车间,检测车间),加工 3 种类型产品。每种产品 都在5个不同的车间完成5道工序。
如果一项作业在特定时间到达车间,发现该组机器全都忙着,
该作业就在该组机器处排入一个FIFO规则的队列的暂存区, 如果有前一天没有完成的任务,第二天继续加工。
相关数据如下:
表1: 车间配备(单位:台) 普通车间 机器数量 3 钻床车间 3 铣床车间 2 磨床车间 3 检测车间 1
表.2: 加工时间(单位:min) 普通机床 钻床 铣床 磨床 检测
产品1
提示:
提示:发生器的设置
提示:发生器的设置
系统仿真实验(完)

《控制系统仿真》(实验/学习总结)报告题目:控制系统仿真院系:电子信息与控制工程系专业:测控技术与仪器专业授课教师:陈政强,石玉秋本科生:邓毅班级:测控082学号: 200800304080 完成时间: 2011.01.15实验二 经典控制系统分析实验内容(带*号的可不做)1.教材P82页,4.8(任选一个小题)和4.11,已知单位负反馈的开环传递函数为下面的表达式,绘制当K 从0到无穷大时的闭环系统的根轨迹图:(1):ss s k G )22()(s 2++=程序:num=[1,2,2];den=[1,0];g=tf(num,den); rlocus(g) 图形:-1-0.500.51Real AxisI m a g i n a r y A x i s4.11:已知闭环系统的传递函数为:()()()()501.52559.41301)(2+++++=s s s s s s G 试求系统的超调量00σ和过渡过程时间s t 。
程序:num=conv([0,1301],[1,4.9]);den1=conv([1,5,25],[1,5.1]);den2=[1,50]; den=conv(den1,den2);g=tf(num,den); yss=1; t=0:0.1:10;[yout,t]=step(g); [y1,t]=max(yout); Mp=(y1-yss)/yss step(g);Mp =0.169700.51 1.52 2.50.51Step ResponseTime (sec)A m p l i t u d e3.已知某控制系统的开环传递函数1512(),.()()KG s K s s s ==++试绘制系统的开环频率特性曲线,并求出系统的幅值与相位裕量。
程序如下: num=1.5;den=conv([1,0],conv([1,1],[1,2])); g=tf(num,den);bode(g,{0.0001,100});grid; [Gm,Pm,Wcg,Wcp]=margin(g) figure(2);margin(g); Gm =4.0000Pm =41.5340Wcg =1.4142Wcp =0.6118-1000100M a g n i t u d e (d B)10-270-225-180-135-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)M a g n i t u d e (d B )10-210102P h a s e (d e g )Bode DiagramGm = 12 dB (at 1.41 rad/sec) , P m = 41.5 deg (at 0.612 rad/sec)Frequency (rad/sec)5.对下面传递函数给出的对象模型0510********(.)()(.)(.)(.)K s G s s s s -+=+++绘制根轨迹曲线,并得出在单位反馈下使得闭环系统稳定的K 值范围。
系统建模与仿真期末大作业

基于关键链的病人排队信息系统开发摘要当今社会医疗服务中的排队等待问题是不可避免的,也已经成为影响医院服务水平和服务质量的一大问题,如何采用新的思路和方法来缩短排队时间,提高医院服务效率,是大家关注的一个普遍问题。
本课题针对病人在医院就诊过程中,在挂号、检测、检验、诊断过程中的多次排队等待的问题,将基于Flexsim Healthcare医疗专用仿真软件,把病人在医院中的就诊流程模型还原,进而建立病人排队优化调度模型,以此开发医院病人排队调度管理信息系统,从而优化病人排队结构,节省病人排队等待时间,显著改善医院的服务效率和服务质量。
关键词:医院;病人排队;Flexsim Healthcare;仿真模型;优化Patient Queuing Information System Development Basedon Critical ChainAbstractIn today's society, waiting during the medical service processing is inevitable, and has also become a big problem which affects service level and the service quality in hospital. How to adopt new ideas and ways to shorten queuing time, and how to improve the efficiency of hospital services, has caused a common attention. This topic aimed at patients waiting for many times in the process of registered, detection, inspection, and the diagnosis in hospital, will be based on the Flexsim Healthcare which is special simulation software for medical treatment, to restore the model of the process of patient doctoring in the hospital, and to set up the patient queuing optimization scheduling model, then to develop patient queuing management information system for hospital, so as to optimize the patient lining up structure, save patients waiting for time, and improve the service efficiency and hospital service quality.Key Words:hospital; patient queuing; Flexsim Healthcare; optimization目录1.绪言 (2)2.课题研究 (2)3.理论分析 (3)3.1数据采集方法: (3)3.2数据样本分析: (3)3.3数据分析方法: (4)3.4建模方法 (4)4.昆华医院平面布局图 (4)5.昆华医院就诊流程汇总 (6)6.科室数据分析及仿真模型 (8)6.1 取药分析及模型 (8)6.1.1 取药数据分析 (8)6.1.2 取药仿真模型 (9)6.2 儿科科室分析及模型 (10)6.2.1 儿科科室数据分析 (10)6.2.2 儿科科室仿真模型 (12)7.典型复杂就诊流程及仿真模型 (13)8.1 分析与结论 (18)8.2 改进建议 (18)9.个人总结 (18)10.参考文献 (19)11.附件 (19)昆明理工大学工业工程大作业论文1.绪言医院病人多次排队是一个普遍性问题,目前中国医院的病人排队采用的是单级排队方法,不能处理多级排队。
控制系统数字仿真大作业.
《控制系统数字仿真》课程大作业姓名: ____________________________学号: ____________________________班级: ____________________________日期: ____________________________ 同组人员: ___________________________目录一、引言 (2)二、设计方法 (2)1、系统数学模型 (2)2、系统性能指标 (4)2.1绘制系统阶跃响应曲线、根轨迹图、频率特性 (4)2.2稳定性分析 (6)2.3性能指标分析 (6)3、控制器设计 (6)三、深入探讨 (9)1、比例-微分控制器(PD) (9)2、比例-积分控制(PI) (12)3、比例-微分-积分控制器(PID) (14)四、设计总结 (17)五、心得体会 (18)六、参考文献 (18)一、引言MATLAB语言是当今国际控制界最为流行的控制系统计算机辅助设计语言,它的出现为控制系统的计算机辅助分析和设计带来了全新的手段。
其中图形交互式的模型输入计算机仿真环境SIMULINK,为MATLAB应用的进一步推广起到了积极的推动作用。
现在,MATLAB语言已经风靡全世界,成为控制系统CAD领域最普及、也是最受欢迎的软件环境。
随着计算机技术的发展和应用,自动控制理论和技术在宇航、机器人控制、导弹制导及核动力等高新技术领域中的应用也愈来愈深入广泛。
不仅如此,自动控制技术的应用范围现在已发展到生物、医学、环境、经济管理和其它许多社会领域中,成为现代社会生活中不可或缺的一部分。
随着时代进步和人们生活水平的提高,在人类探知未来,认识和改造自然,建设高度文明和发达社会的活动中,控制理论和技术必将进一步发挥更加重要的作用。
作为一个自动化专业的学生,了解和掌握自动控制的有关知识是十分必要的。
利用MATLAB软件及其SIMULINK仿真工具来实现对自动控制系统建模、分析与设计、仿真,能够直观、快速地分析系统的动态性能和稳态性能,并且能够灵活的改变系统的结构和参数,通过快速、直观的仿真达到系统的优化设计,以满足特定的设计指标。
系统建模与仿真课后作业
所以,蒙特卡罗方法的基本思想就是:当试验次数充分多时,某一事件出现的频率近似等于该事件发生的概率。
一般步骤:(1)构造或描述概率过程
(2)以已知概率分布进行抽样
(3)建立各种估计量
2.8、简述离散事件系统仿真的一般步骤。
(1)阐明问题与设定目标
(2)仿真建模
29
1023
511
0.998047
5
103
103
0.201172
30
2558
510
0.996094
6
518
6
0.011719
31
2553
505
0.986328
7
33
33
0.064453
32
2528
480
0.9375
8
168
168
0.328125
33
2403
355
0.693359
9
843
331
0.646484
34
1778
242
0.472656
10
1658
122
0.238281
35
1213
189
0.369141
11
613
101
0.197266
36
948
436
0.851563
12
508
508
0.992188
37
2183
135
0.263672
13
2543
495
0.966797
38
678
166
0.324219
控制系统与仿真期末作业电子稿
西南科技大学研究生试题单年级 2015 专业控制、控工 2015-2016学年第1学期考试科目控制系统仿真命题人王建伟共1页第1页2015级研究生选修课《控制系统仿真》考核内容与方式一、题目(结合自己的研究方向,从下面2题任选一题)1.结合自己的研究方向,选择一种你认为和仿真课程相关的题目书写一份报告。
(70分)2.采用MATLAB编程工具,选取和研究方向相近的自命题,编写仿真程序,理解掌握程序代码的含义、使用方法及其每个程序段的目的和功能,给出仿真结果。
(70分)二、提交要求1.提交打印报告及电子稿,附录部分提交程序代码及其曲线图、注明程序功能,理解代码含义。
2.报告提交时间地点:2016年1月12日上午9点,综合楼402。
选题:2.采用MATLAB编程工具,选取和研究方向相近的自命题,编写仿真程序,理解掌握程序代码的含义、使用方法及其每个程序段的目的和功能,给出仿真结果。
自我情况介绍:姓名:王桂山学号:2015000102 专业:控制科学与工程学院:理学院TEL:主要利用理论:复杂网络的社团结构计算和应用研究方向: 网络在自然界和人类社会中普遍存在,包括自然界中天然存在的星系、食物链网络、神经网络、蛋白质网络;人类社会中存在的社交网络、传染病传播网络、知识传播网络;人类创造的交通网络、通信网络、计算机网络等。
本论文注解着重介绍了复杂系统与网络中的社团网络结构的程序.自命题: 《复杂网络理论在恐怖分子社团分析中的应用》利用资源:绵阳市移动数据及相关数据资料(个人数据保密)本项目从今年十月份开始,陆陆续续开展,中间出了很多的问题,程序修改了很多次,每次任老师叫我过去亲自给我讲解,通过王建伟老师的的课堂,让我更加明确了自己的研究方向,坚定了对科研的追求,然而从零开始的,从基础开始,也是很困难的事情,但是任老师没有放弃我,然后每次又都能从王老师课堂上得到很多的鼓励,使我能够有足够的多的信心去继续下去。
系统建模与仿真作业集课程设计 (2)
系统建模与仿真作业集课程设计引言本文档将介绍一个基于系统建模与仿真作业集的课程设计,详细说明系统设计和仿真的过程。
本课程设计旨在提高学生对系统建模与仿真的理解,并将这些理论知识应用到实际场景中。
通过本课程设计,学生将学习如何使用系统建模和仿真工具来设计和验证系统的性能和功能。
设计目标本课程设计的主要目标是通过实践帮助学生掌握以下技能:1.使用系统建模和仿真工具来设计和验证系统的性能和功能2.编写系统建模和仿真程序以完成建模和仿真任务3.将理论知识应用到实际场景中,提高学生对系统建模与仿真的理解设计步骤本课程设计的内容将围绕着以下三个方面进行:1.系统建模与仿真的理论2.使用系统建模与仿真工具进行系统建模与仿真3.实际案例的应用第一步:系统建模与仿真的理论在本课程设计的第一步中,学生将学习系统建模与仿真的理论。
这些理论将包括以下内容:1.系统建模与仿真的基本概念和原理2.系统建模与仿真的语言和工具3.系统建模与仿真的技术和方法课程设计者应该选择适合学生学习的教材和参考资料,并设计测试来帮助学生理解和掌握这些理论。
第二步:使用系统建模与仿真工具进行系统建模与仿真在本课程设计的第二步中,学生将学习如何使用系统建模与仿真工具来进行系统建模与仿真。
这些工具将包括以下内容:1.系统建模与仿真软件的介绍和应用2.系统建模与仿真的模型设计3.系统建模与仿真的参数设定与调整课程设计者应该提供示例程序和操作演示视频来帮助学生了解和熟悉这些工具。
第三步:实际案例的应用在本课程设计的第三步中,学生将学习如何将理论知识应用到实际场景中。
这些实际案例将包括以下内容:1.真实系统建模与仿真2.实际案例的模型和参数设定3.实际案例的仿真结果分析和评价课程设计者应该提供具有挑战性的案例和评估标准,来帮助学生提高实际运用系统建模与仿真技术的能力。
结论本课程设计基于系统建模与仿真作业集,通过三个步骤来帮助学生掌握和应用系统建模与仿真技术。
控制系统仿真大作业
《控制系统仿真》大作业一、基本操作程序实现:1、自己定义一组数据,并将其保存到文件data.dat 。
要求第一列为时间t (t 为等差数列,2000≤≤t );第二列为与t 对应的201个幅值数据,作为信号)(1t f 的幅值;第三列为按s 的降幂排列的传递函数分子系数;第四列为按s 的降幂排列的分母系数。
第三列、第四列的数据个数不能超过5个。
2、读入data.dat 数据, 画出)(1t f 的时域波形。
3、⎪⎩⎪⎨⎧-<≤≤<≤=其它且)3(15)(10010)(100)(*2)(112112t f t f t t f t t f t f求取)(2t f ,将结果保存到result.mat 文件,画出其时域波形。
4、按data.dat 中的第三列、第四列,求取其对应的传递函数,绘制其bode 图。
报告要求:简述程序的实现过程。
二、子系统封装程序要求:1、 用SIMULINK 建立系统:c bx ax y ++=3,x 为输入,y 为输出,c b a ,,为常数。
对该系统进行封装,要求通过对话框能修改c b a ,,的值。
2、 若输入x 为幅度为5、频率为0.25Hz 的锯齿波,采用示波器显示输出y 及输入x 的波形。
3、 将输入x 、输出y ,导入到工作空间,并采用plot 命令,将两个波形在同一波形窗口显示,带网格线、图例。
报告要求:用文字阐述上述程序的实现过程。
三、PID 控制器参数整定 某控制系统的开环传递函数为11010)(230+++=s s s s G ,采用单位负反馈。
程序要求:1、试采用工程整定法,设置合适的P 、PI 、PID 控制器的参数。
2、将仿真时间定为300秒,绘制整定后的系统的单位阶跃响应曲线。
3、设计M 文件,采用编程法求取系统阶跃响应性能指标:超调量、调节时间。
报告要求:1、阐述该题目的PID 参数整定过程。
2、阐述超调量、调节时间的求取过程。
系统仿真答案
系统仿真1、连续数据和离散数据的直方图分别与理论分布的概率密度函数、概率质量函数相对应。
2、Flexsim建模过程中,如何建立和取消两个实体之间的输入和输出端口按住键盘“A”键,点击鼠标左键可以在两个实体之间连接一条线,从而定义两个实体之间的逻辑关系。
这是一种“流”的关系,Flowitem从一个实体的输出端口进入到另一个实体的输入端口。
鼠标左键双击实体,弹出Parameters选项卡,在此可以对系统的逻辑关系进行操作。
?3、仿真中事件、活动和实体的定义。
实体:组成系统的物理单元。
事件:引起系统状态变化的行为,即系统的动态过程是靠事件来驱动的。
活动:两个相邻发生的事件之间的过程。
4、“仿真钟”的推进和推进速度的特点。
仿真钟的推进呈现跳跃性推进速度具有随机性。
?5、具有无记忆性的连续分布和离散分布各是什么。
指数分布、几何分布。
6、三角分布各参数的求法。
高度=2/(c-a)7、在研究排队系统时,决策者通常要在服务台利用率和顾客满意程度之间做出权衡。
8、舍选技术的效率严重依赖于将拒绝数最小化的能力。
9、模型的假设一般分结构假设和数据假设。
10、能够快速显示出模型的合理性的两组统计量是当前容量和总数。
11、预测区间和置信区间各是什么的度量。
预测区间是风险的度量,而置信区间是误差的度量。
12、单、多服务台队列达到稳定的条件是什么。
13、对于绝大多数队列,可以通过什么方式来缩短队列长度。
通过减小服务台利用率或服务时间波动的方式来缩短队列长度。
15、当系统容量有限时,“到达速率”是指什么,“有效到达速率”是指什么?当系统容量有限时,“到达速率”(单位时间的到达数目)和“有效到达速率”(单位时间内到达并进入系统的数目)16、仿真与建模可以用于解答现实世界系统各种各样“如果……就会……”问题。
17、输出分析的目的是什么?目的是预测一个系统的性能或比较两个或多个备选系统设计的性能。
18、本课程所讲述的仿真模型是属于什么类型的数学模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统仿真导结课作业一、概述建模与仿真技术已成功地应用于航空航天、生产制造、交通运输、信息、生物、医学、材料、能源、教育、军事、社会、经济等众多领域;并成功地应用于产品研制的全生命周期,包括需求分析、方案论证、概念设计、初步设计、详细设计、生产制造、试验试飞、运行、维护、训练等各个阶段。
仿真科学与技术正是从其广泛的应用中获得了日益强大的生命力,而仿真技术的发展反过来使得其得到愈来愈广泛的应用。
广义而言,仿真是采用建模的方法和物理的方法对真实环境客观事物进行抽象、映射、描述和复现。
基于系统原理、理论、定律、系统数据等应用计算机技术、软件技术和信息技术建立仿真环境(虚拟环境) ,在仿真环境中对客观事物进行研究。
客观事物包括真实环境中的实体/系统、自然环境(地形、大气、海洋、空间)、和人的行为(操作、决策、推理)。
仿真环境包括模型、数据、软件、物理效应设备、计算机等。
计算机仿真的三要素是系统、模型、计算机,三个基本活动是模型设计、模型执行、模型分析。
计算机仿真的三要素和三个基本活动的关系关系如图1所示。
系统模型设计模型分析模型执行模型计算机图1从模型设计到模型分析经历的过程,即对实物进行仿真可概括为以下几个方面:1) 问题的描述;2) 建立概念模型;3) 建立仿真模型;4) 收集数据;5) 编写程序;6) 在计算机进行模型试验;7) 模型和数据的验证;8) 仿真结果显示;9) 仿真结果分析和评估。
仿真是建立模型在计算机上运行,但这属于数学仿真,随着技术的发展,许多应用领域建立仿真系统时除了模型外还要求将实物和人员包含在仿真回路中。
由此可见,基于仿真设计与传统设计的方法和流程两者有很大区别(图2) ,基于仿真设计可以在计算机上建立虚拟样机,对产品的外形、结构、强度、动力学进行分析设计,满足技术要求后建立实物样机或直接制造产品,可以大量缩短产品研制周期,降低成本。
基于仿真设计或虚拟样机技术可以多学科综合、系统集成,提高有效性。
二、应用实例1.系统仿真在天文望远镜设计中的应用天文望远镜系统仿真是基于天文望远镜设计中三大基本模块:光学系统设计、机械结构设计及分析和自动控制系统设计的常用软件,并基于规定的数据结构和输入输出格式,建立各自相对独立的模型,通过编制计算机程序将三者相互关系有机地联系起来构成一个集成的望远镜系统的设计和分析模型。
考虑外界环境的影响,诸如热、风、地震等载荷,通过软件模拟或实测数据的方式加入该集成模型。
据此对望远镜进行仿真分析得到各种响应乃至最终成像质量,评价望远镜工作性能和优化设计方案。
这种系统仿真技术的引入,使得在天文望远镜设计中可有效地对望远镜设计方案进行整体性价评估和方便迅速地进行优化改进,具体地,可概括为以下诸方面:1) 识别影响系统性能的关键因素;2) 验证设计之初某些探索性假设;3) 从系统层面上来优化和平衡各子系统的设计;4) 从系统层面上来权衡和克服各种干扰因素;5) 方便某些器件/设备的指标确定和选型,寻求更有效的提升望远镜性能的方法,优化设计方案;6) 在项目执行较早的阶段即可仿真以评价望远镜工作性能,并且逐步修正模型,直到项目结束。
子系统建模包括光学系统、机械结构系统和自动控制系统三大基本模块的计算机模型建立,参见图3,以机械结构模型为例,一般采用有限元软件ANSYS的参数化设计语言建立望远镜的有限元模型。
采用参数化建模便于调整设计和后续优化设计。
通过有限元模型可求解望远镜在重力、风载以及地震破坏等载荷下的响应,更为重要的是,通过有限元模态计算提取望远镜的固有频率和振型,将望远镜机械结构有限元模型转化为状态空间方程,以供控制仿真分析。
图3为使集成化模型可接受外界干扰因素和载荷的作用并自动进行分析,需要建立相应的计算机模型进行模拟。
外界干扰因素和载荷主要指重力、风载及热、大气扰动和地震作用等。
以风载为例,风载模型的建立涉及风载的物理描述以及在望远镜有限元模型上作为边界条件的实施。
风速是随机变量,因此风载是随机载荷,计算分析中一般采用功率谱描述风速,并转化为风压功率谱分别作用于望远镜结构的有限元模型上进行分析,一般分为静风载和动风载两部分来考虑。
将随机风速写为)()(t v t V V z +=,即平均风速与随机风速之和,则风压可按(1)式计算:式中,C D 为风阻系数,为空气密度。
舍去高阶小项,上式可改写为静风压P 和随机风压之和:其中静风压P 可直接作用于望远镜有限元模型进行分析,而一般用Davenport 谱或Simiu 谱(风速功率谱)来描述随机风的运动模型。
后者为式中,n 为频率,V z 为离地高度z 处的平均风速,f 无量纲频率函数,u f为地面摩擦剪切风速函数。
考虑到结构的影响,上式还需要虑及空气动力衰减因子,于是,可得到随机风压的功率谱:上式即可用于有限元分析。
图4 为风速2m/s 的风压谱曲线。
在望远镜的系统仿真中还包括模型集成、模型简化、数据储存和显示、还涉及计算机编程技术、软件接口技术、计算技术乃至并行计算等技术。
2.基于数值仿真技术的单颗磨粒切削机理磨削过程是磨具表面大量形状各异的磨粒参与的多刃切削过程。
单颗磨粒切削研究是认识复杂磨削作用的重要手段,但是单颗磨粒切削试验的实施和物理量的测量存在一定的难度。
2.1 单颗磨粒切削物理模型图1表示单颗磨粒去除材料的物理过程。
磨粒被简化为带有圆头的圆锥,随着磨粒以水平速度v 切入工件材料,一部分工件材料在磨粒前端产生了塑性变形,产生塑性变形的材料有两种流动形式:产生切屑和在磨粒两侧的塑性隆起;另一部分工件材料从磨粒下方流向磨粒后部并发生弹性回复。
图2 显示了单颗磨粒去除材料过程中材料的流动方向。
其中上视图中的方向I 代表了材料在磨粒侧面的流动形成了塑性隆起;方向II代表了材料流到磨粒圆头下方,并在磨粒后部弹性回复;方向III代表了材料形成切屑。
将磨粒接触的材料分为F-HEIG 和HEI-JBK 两个区域,区域F-HEIG 内材料变形的形式为弹性变形,最大应力发生在F 点,其值等于材料的屈服极限应01为圆心的圆周上,其值等于0。
区域HEI-JBK 内材料力σY。
最小应力位于以的变形方式为塑性变形,这部分材料在沿磨粒垂直y 轴剖面外圆周方向受到拉应力;在垂直y 轴剖面径向方向受到压应力。
同时,作用于磨粒的材料塑性变形开始于弧HEI,终止于弧JBK,在这个过程中产生的拉应变和压应变分别为:2.2 单颗磨粒切削力学模型F-HEIG区域x向和y向切削力分别表示为HEI-JBK区域x向和y向切削力分别表示为因此单颗磨粒切削合力的x 向分量表达式为F F F x x x 21+=单颗磨粒切削合力的y 向分量表达式为F F F y y y 21+=从单颗磨粒切削力表达式中可以看出,要对其进行求解需要三个方面的基本数据:材料应力—应变关系(本构模型)、摩擦模型和磨粒几何参数。
淬硬AISI D2钢(62 HRC)由于其高硬度和良好的耐磨性,是一种被广泛应用于模具制造行业的金属材料,在本研究中被选为被加工材料。
迄今为止研究者提出了多种这样材料的本构模型,其中符合幂指数关系的材料模型是一种普遍适用的材料模型,其表达式为预测单颗磨粒切削力的另一个重要参数就是平均摩擦因数。
利用CETR 公司的UMT-2高速球盘摩擦试验机测定了不同滑动速度下AISI D2钢和氧化铝球的摩擦因数(如图3所示),用于有限元仿真摩擦模型的建立。
从而得到摩擦模型。
对于磨粒几何参数,研究中以WA60L8V 砂轮磨粒的平均几何参数作为有限元的输入条件,WA60L8V 砂轮磨粒的平均几何参数:磨粒顶角2θ = 73.74°,磨粒圆头半径r=41.61μm 。
从而得到其几何尺寸。
验证试验在划痕试验机上进行,试验机采用的是金刚石压头,压头形状是圆头圆锥,压头顶角为120°,压头圆头半径为0.2 mm,滑动速度为4 mm/min,设垂直载荷Fn=15 N、25 N、35 N、45 N,划痕长度为4 mm。
划痕过程中记录划痕阻力f,与解析计算、有限元分析结果进行对比。
利用Matlab 进行相应的解析计算可以得到压头在滑动方向上的阻力。
了试验结果和解析计算、有限元计算结果的对比,可以发现,解析计算、有限元计算结果与试验结果的吻合程度较好,基本证明了所建立的力学模型和数值仿真模型是准确的。
3.码垛机器人的轨迹规划与仿真分析针对码垛机器人在高速运行过程中产生的冲击问题,以优化运行节拍提高效率为目的对码垛机器人的运动轨迹进行规划利用笛卡尔空间圆弧插补方法对运轨迹进行优化,并在此基础上利用三次曲线插补对关节运动轨迹进行了再次修正,基于建立模型对规划结果进行了仿真结果表明通过轨迹曲线规划方法使得码垛机器人在运行过程当中满足了减小运行冲击和提高运行效率的要求。
3.1 空间圆弧轨迹的插补空间圆弧插补的路径如图5所示:计算可得空间圆弧插补的递推插补方程为:()l nm i i i,,为切向进给方向。
根据上述方法可以求出规划轨迹插补点的空间坐标,利用这些点使用Matlab可以绘制出仿真空间轨迹如图6所示,图中曲线所取插补岡弧半径r=50cm 插补点间距l=10cm,图中黑色的轨迹为原轨迹,圆点为规划轨迹。
可以证明在货物提升之后到货物搬运过程的曲线由之前的尖锐夹角过渡成为平滑的圆弧,避免了由于尖锐过度造成的问题。
图6 轨迹规划空间及关节运动曲线由轨迹规划曲线我们可以知道根据现有轨迹运动,r 值变化存在一个现变小后变大的过程,这个过程实际上是多余的,它会引起加减速过程从而减缓运动速度。
在实际运动中所做的运动路程更氏速度变化也更大 更大的运动变化同时也会造成更明显的震动和冲击。
考虑到上述问题, 有必要对关节的运动曲线进行重新规划。
对于上述问题本文利用三次曲线插补的方法进行处理。
三次曲线具有二阶可导性,其表达方式保证了其一阶求导结果即速度曲线平滑和二阶求导结果即加速度曲线的连续性在原有插补点基础上可以保证所得结果符合路程运动和速度曲线的要求。
可以推导出修正插补曲线的方程为:对于方程插补确定起始点位置坐标()t Q 11和速度()t Q 1'1以及终止点的位置坐标坐标()t Q n n 和速度()t Q nn ,可得到方程组:规划中胜定速度在起始点和终止点皆为0,因此由方程式可以求出所需要的A 、B 、C 、D 四个未知量以确定三次曲线的方程。
通过Matlab 仿真如图7所示。
图7 轨迹规划空间及关节运动曲线通过关节运动轨迹图7可以看出r,关节轨迹,运动满足要求不再出现富动。
速度曲线图也显示速度变化更加平稳,幅值变化不大。
4. 计算机仿真技术及其在生产系统中的应用生产系统是一个为了生产某种或某类产品, 综合生产工艺、生产计划、质量控制、人员调度、设备维护、物料控制等各种技术为一体的复杂系统。