三自由度永磁球形电极磁场分析!!!
基于有限元法的永磁球形电动机三维瞬态分析
基于有限元法的永磁球形电动机三维瞬态分析[摘要]为了分析永磁球形电动机三维瞬态特性,采用有限元法对电机特性进行了相关的研究。
本文介绍了有限元法的基本原理以及Ansoft公司的Maxwell 3D瞬态场计算原理。
建立了永磁球形电动机三维有限元模型,设置运动区域,仿真分析得到转矩,绕组磁链以及电机反电势动态特性。
为了研究相关电机参数对瞬态特性影响,给出不同的绕组电流和转子转速并进行对比,得出不同的电机参数对电机瞬态特性有一定的影响。
[关键词]球形电动机有限元法瞬态分析转矩特性0引言当前应用广泛的机器人、机械手主要靠多台单自由度元件进行配合,这种装置有很大的缺点,比如体积庞大,精密度低,动、静态性能差等。
为了改善系统的性能,国内外学者将研究重点放到了球形电动机的研究上。
球形电动机可以大大简化机构的复杂度,提高定位精度和响应速度,缩小机构体积,从而达到快速定位的目的。
因此,球形电动机的研究有着广阔的前景。
早些年,国内外关于球形电动机的研究主要包括:Laithwaite等人的感应型球形电动机[1],Kok-Meng Lee等人的变磁阻型球形电动机[2],Kaneko首先提出的球形直流电动机,华中理工大学提出的双馈型球形电动机等[3]。
但近年来,随着永磁材料的日益发展和在电机中的广泛应用,具有多自由度的永磁式球形电动机由于具有体积小、重量轻、力能指标高、控制简单的优点,已经成为多自由度电动机研究的热点之一。
合肥工业大学对永磁步进电动机进行了一系列的研究[4-6]。
新加坡南洋理工大学研制了一台三自由度永磁球形电动机,并对其进了建模和设计[7-10]。
天津大学将Halbach阵列应用到永磁球形电动机上,来改善电机的电磁场分布,使气隙磁场的波形更接近于正弦波形,提高了电机的运行性能[11-15]。
但目前关于永磁球形电动机磁场和转矩特性的分析基本是围绕其稳态特性进行的分析。
在实际的电磁场问题中,不仅要进行稳态工况和某个暂态时刻工况的分析,有时还需要对某一时间段内的暂态工况进行分析,得到所关心的宏观电气参量或微观电磁参量与时间的瞬时关系。
永磁转子偏转式三自由度运动电机位置检测方法的基础研究的开题报告

永磁转子偏转式三自由度运动电机位置检测方法的基础研究的开题报告一、研究背景及意义永磁转子偏转式三自由度运动电机在机器人、飞行器、医疗器械等领域中具有广泛的应用。
为了更好地实现对电机运动状态的控制和检测,研究永磁转子偏转式三自由度运动电机的位置检测方法具有重要意义。
传统的位置检测方法往往存在精度低、易受干扰和复杂等问题。
因此,本文旨在探索一种基于磁场传感器的新型位置检测方法,提高永磁转子偏转式三自由度运动电机的控制精度和实用性。
二、研究目标本文研究的目标是探索一种基于磁场传感器的永磁转子偏转式三自由度运动电机位置检测方法。
具体包括以下几个方面:1. 永磁转子偏转式三自由度运动电机的运动特性分析。
2. 磁场传感器的工作原理和应用范围研究。
3. 设计并实现一个基于磁场传感器的永磁转子偏转式三自由度运动电机位置检测系统。
4. 对所设计的位置检测系统进行实验验证,分析其性能和优化改进空间。
三、研究内容及方法1. 永磁转子偏转式三自由度运动电机的运动特性分析本文将首先对永磁转子偏转式三自由度运动电机的运动特性进行详细分析,包括电机三自由度的运动规律、转子磁极位置以及磁场变化规律等方面。
2. 磁场传感器的工作原理和应用范围研究本文将介绍磁场传感器的工作原理和种类,并探讨其在永磁转子偏转式三自由度运动电机位置检测中的适用性。
同时,将对不同类型的磁场传感器进行比较和评估,选取最适合的磁场传感器进行实验验证。
3. 设计并实现一个基于磁场传感器的永磁转子偏转式三自由度运动电机位置检测系统本文将设计并实现一个基于磁场传感器的永磁转子偏转式三自由度运动电机位置检测系统,包括传感器的选取、位置检测算法的设计、数据采集和处理等方面。
4. 对所设计的位置检测系统进行实验验证,分析其性能和优化改进空间本文将利用实验数据对所设计的位置检测系统进行性能评估,并进行系统优化和改进。
同时,将分析该位置检测系统在永磁转子偏转式三自由度运动电机控制中的应用前景和发展方向。
永磁转子偏转式三自由度电机电磁系统的建模与分析

El e c t r o ma g n e t i c s y s t e m mo d e l i n g a n d a n a l y s i s o f n o v e l 3 - DOF de le f c t i o n t y pe p e r ma n e n t ma g n e t mo t o r
Ab s t r a c t : Ac c o r d i n g t o t h e c o mp l i c a t e d s t r u c t u r e a n d c o mb i n e d s p i n — d e l f e c t i o n mo t i o n mo d e o f a n o v e 1 3
第 1 9卷
第 7期
电 机 与 控 制 学 报
El e c t r i C Ma c h i n e s a n d Co n t r o l
Vo 1 .1 9 No . 7
2 0 1 5年 7月
J u l y 2 0 1 5
永磁 转 子 偏 转 式 三 自由度 电机 电磁 系统 的 建模 与分 析
a n a l y t i c l a me t h o d f r o m t h e a n g l e o f e n e r g y c o n v e r s i o n .T h e h a r mo n i c c o n t e n t a n d ma g n e t i c i f e l d c h a n g e s i n d i f f e r e n t n u mb e r o f r o t o r p o l e s w e r e c o mp a r e d .I n a d d i t i o n,t h e e n e r y g t r a n s f e r s i t u a t i o n b e t we e n s t a t o r
三自由度带永磁体电磁悬浮系统的控制方法
触持电棚
… … … …
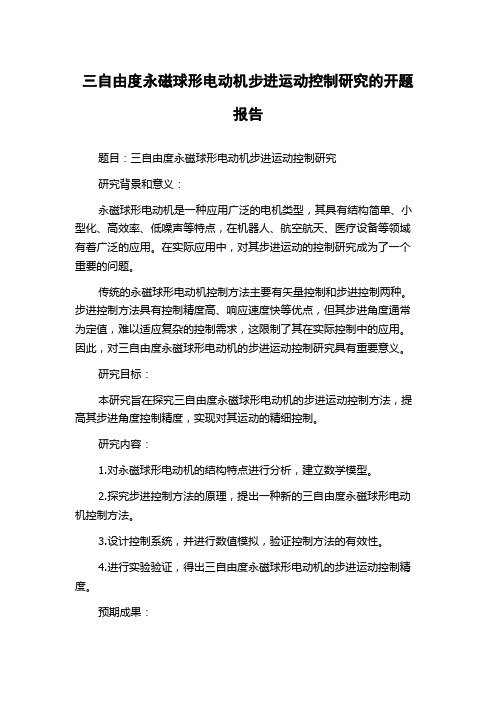
_ .…
…
…
…
27 第 期 o 年 8 o
… … … … … …
…
. …
. …
…
…
…
…
…
…
一
…
_- _- _- _-- - - - …
…
…
…
…
…
…
一一 己 : / / 辑
驱 拉
露,
・ 2
… 一
三 自 由度 带 永 磁 体 电磁 悬 浮 系统 的控 制 方 法
为例 。
只能控制 一个 自由度 , 自己不 能 单 独 构建 一 个 悬 它 浮 系统 。文 献 [ ] 出 了 一 种 新 型 的 电磁 悬 浮 系 3 提 统, 它是一 个 由带有 永 磁 体 的 四极 共 轭 电磁 铁 构 建
小 型悬浮 系统 。
该 电磁 结 构可 以控 制 三个 自由度 , 竖直 方 向 的 气 隙 , 绕 轴转 动 的 0 斜 角 度 , 倾 以及 绕 轴 转 动 的 角度 。其 中 , 三个 绕组 电流 i、 、 :i i 分别 控制 坚
WA ig.W NG Ja 一 NG jn A in M
( h n h i i t gU iesy S a g a 2 0 4 C ia S ag a J oo nvr t ,h n h i 0 2 0, hn ) a n i
Absr t:n t spa e , onr lmeho sp o s d f r3 d g e so r e o e e to g ei e iai n s se wi t ac I hi p r a c to t d wa r po e o e r e ffe d m l cr ma n tc lvt to y t m t h p r ne g e n wh c he U — t p g e e ma ntma n ti ih t y e ma n twasr plc d b 一 p l y o y i lc r ma n t e a e y a4 oe tpe y ke h brd ee to g e .And te lw h o c ns o ume we o to t u a e o sc n b e lz d b h sm eh d. d po rc n rlwiho tg p s ns r a e r aie y t i t o Ke y wor ds: l cr ma n tc lvt to y t m ;o c ns m e p we o to ; t o tg p e s r ee to g e i e ia in s se l w o u d o rc nr l wih u a s n o s;no — ln a de n ie rmo l
磁场问题中的三大重要模型

磁荷定布和磁场作用的基 本物理量,类似于电场中的电荷。磁 荷分为北极磁荷和南极磁荷,分别对 应磁场的N极和S极。
磁荷性质
磁荷具有极性,即北极磁荷和南极磁 荷不能单独存在,它们总是成对出现 。此外,磁荷还具有不可分割性,即 一个磁体的北极磁荷总数和南极磁荷 总数总是相等的。
磁流体力学模型
优点在于能够描述大尺度、强磁场的复杂行为, 如磁场重联、湍流等;缺点在于计算复杂度高, 需要高性能计算机支持。
磁弹性力学模型
优点在于能够描述磁场与固体材料相互作用的复 杂行为,如磁致伸缩、磁弹性波等;缺点在于模 型复杂度高,计算量大。
模型之间的联系与转换
磁偶极子模型与磁流体力学模型的转换
作用来解决磁场问题。该模型适用于描述铁磁性物质的磁场问题。
03
电磁场模型
将电场和磁场看作是一个统一的电磁场,通过求解麦克斯韦方程组来研
究电磁场问题。该模型适用于描述大尺度、强磁场的磁场问题,以及电
场和磁场的相互作用。
02
模型一:磁偶极子模型
磁偶极子定义及性质
磁偶极子定义
磁偶极子是由两个等量异号磁荷 构成的系统,具有一定的磁矩。
性质
电流元具有方向性,其方向与电流方 向一致;同时,电流元具有矢量性, 可以叠加和分解。
电流元间相互作用力
电流元间相互作用力遵循安培定律, 即两电流元之间的作用力与它们的电 流强度、长度以及它们之间的夹角有 关。
电流元间相互作用力表现为吸引力或 排斥力,具体取决于电流元的相对方 向和位置。
电流元在磁场中的运动规律
电机、电磁铁、磁悬浮等。
掌握磁场问题的解决方法对于理 解物理现象、推动科技进步和提
高生活质量具有重要意义。
三大模型概述
一种多自由度电机三维磁场分析及永磁体设计

一种多自由度电机三维磁场分析及永磁体设计李争;孙克军;王群京;王咏涛【摘要】在简述永磁球形多自由度电机的优越性能的基础上,针对一种新型永磁球形多自由度电机提出了4种永磁转子设计方案,对每一种永磁体结构进行了静磁场磁通密度模值和磁场分布计算,建立了球坐标下永磁体磁场解析求解模型,进行对比分析.同时基于三维有限元软件,对各种永磁转子结构的球形多自由度电机转矩特性进行了计算和仿真.设计制备了5个圆柱体组合结构的钕铁硼永磁转子来代替球形结构,制作了模型样机.理论分析和实验结果表明了所设计结构的有效性,转子易于实现三自由度偏转运动,并对转子永磁体的受力进行了测试,与仿真计算结果一致.%Based on the brief introduction of the superior performance of permanent magnet (PM) spherical multi-degree-of-freedom (M-DOF) motors in this paper, four kinds of permanent magnetic rotor design schemes for a novel PM spherical M-DOF motors were presented. The static magnetic flux density modulus value calculation and static magnetic field analysis of each kind of permanent magnet structure were implemented, and the analytical model of magnetic field in the spherical coordinate was developed with comparison results. The torque characteristics of the PM spherical M-DOF motor with different rotor structures were calculated using 3D finite element software. Finally the NdFeB rotor with five-cylinder structure instead of the ideal spherical structure was adopted to manufacture the prototype. The theoretical analysis and experiment results demonstrate the effectiveness of the designed structure. The rotor is easy to achieve three-degrees-of-freedomdeflection, and the forces on permanent magnets of rotor are tested, which are consistent with the simulation results.【期刊名称】《电机与控制学报》【年(卷),期】2012(016)007【总页数】7页(P65-71)【关键词】球形电机;永磁体;多自由度;三维磁场;有限元法【作者】李争;孙克军;王群京;王咏涛【作者单位】河北科技大学电气工程学院,河北石家庄050018;河北科技大学电气工程学院,河北石家庄050018;合肥工业大学电气与自动化工程学院,安徽合肥230009;安徽大学电气工程与自动化学院,安徽合肥230039;河北科技大学电气工程学院,河北石家庄050018【正文语种】中文【中图分类】TM3010 引言当前的多自由度运动往往由多个单自由度驱动元件和复杂的传动装置来构成,从而造成驱动系统体积庞大,精密度低,动、静态性能差;并且由于装置中较多传动装置,导致了转动惯量的增加和非线性摩擦的产生,传动装置同时降低了系统刚度,增加了系统的不稳定性。
三自由度永磁球形电动机步进运动控制研究的开题报告
三自由度永磁球形电动机步进运动控制研究的开题报告题目:三自由度永磁球形电动机步进运动控制研究研究背景和意义:永磁球形电动机是一种应用广泛的电机类型,其具有结构简单、小型化、高效率、低噪声等特点,在机器人、航空航天、医疗设备等领域有着广泛的应用。
在实际应用中,对其步进运动的控制研究成为了一个重要的问题。
传统的永磁球形电动机控制方法主要有矢量控制和步进控制两种。
步进控制方法具有控制精度高、响应速度快等优点,但其步进角度通常为定值,难以适应复杂的控制需求,这限制了其在实际控制中的应用。
因此,对三自由度永磁球形电动机的步进运动控制研究具有重要意义。
研究目标:本研究旨在探究三自由度永磁球形电动机的步进运动控制方法,提高其步进角度控制精度,实现对其运动的精细控制。
研究内容:1.对永磁球形电动机的结构特点进行分析,建立数学模型。
2.探究步进控制方法的原理,提出一种新的三自由度永磁球形电动机控制方法。
3.设计控制系统,并进行数值模拟,验证控制方法的有效性。
4.进行实验验证,得出三自由度永磁球形电动机的步进运动控制精度。
预期成果:1.对永磁球形电动机的步进运动控制方法进行研究,提出一种新的控制方法。
2.提高三自由度永磁球形电动机的步进角度控制精度,实现对其运动的精细控制。
3.开发了相应的控制系统,能够实现对三自由度永磁球形电动机的控制。
研究方法:本研究将通过理论分析和数值模拟,以及实验验证的方法,对永磁球形电动机的步进运动控制方法进行研究和探索。
研究期间将开发相应的控制系统,并通过实验验证研究成果的有效性。
研究计划:1.前期调研和文献调研(1个月);2.三自由度永磁球形电动机的数学模型建立与步进控制方法研究(2个月);3.控制系统的设计与数值模拟(3个月);4.实验验证与数据分析(2个月);5.论文撰写和答辩准备(2个月)。
参考文献:[1] 陈建华. 机电系统控制原理与应用[M]. 北京:中国电力出版社,2006.[2] 张兴华,孙涛,刘茂男. 基于三自由度永磁球形电动机的高速反转机构研究[J]. 机电工程师,2019,36(4):20-25.[3] 田中仁志,山津正彦,丸尾利彦. 高精度直线运动的三维向量式步进驱动[J]. 机械设计,2012,29(3):44-50.。
Halbach阵列永磁球形电动机三维磁场分析的开题报告

Halbach阵列永磁球形电动机三维磁场分析的开题报告一、选题背景随着人类对于环保和高效的要求不断提高,永磁球形电动机在车辆、家电等领域的应用越来越广泛。
而Halbach阵列永磁球形电动机则是一种特别的永磁球形电动机,它的磁场强度和磁场均匀性远远高于传统的永磁球形电动机,因此具有更好的性能和效率。
而为了设计高效的Halbach阵列永磁球形电动机,需要对其进行磁场分析和优化设计。
二、研究目的本文旨在通过三维磁场分析,探讨Halbach阵列永磁球形电动机的磁场特性,分析其磁场强度和磁场均匀性,并对其磁场进行优化设计,以提高其效率和性能。
三、研究方法1. 基础理论学习:主要包括永磁电机的基本原理、磁场学和电机设计原理等方面的基础理论学习。
2. 建立模型:通过SolidWorks等CAD软件建立Halbach阵列永磁球形电动机三维模型,确定其实际尺寸和工作条件。
3. 磁场分析:通过ANSYS等有限元软件,建立Halbach阵列永磁球形电动机三维磁场有限元模型,进行磁场分析。
4. 优化设计:根据磁场分析的结果,对Halbach阵列永磁球形电动机的磁场进行优化设计,以提高其效率和性能。
5. 结果分析:对优化后的Halbach阵列永磁球形电动机进行仿真验证,并对仿真结果进行分析,得出结论。
四、预期成果通过对Halbach阵列永磁球形电动机的磁场分析和优化设计,得出其磁场特性和性能,并对其效率和性能进行提高,为永磁球形电动机的应用提供理论和实践参考。
五、研究难点1. 永磁球形电动机的磁场分析和优化设计需要较为深入的磁场学和电机设计原理知识。
2. 在建立模型和进行磁场分析时,需要保证模型的真实性和精度。
3. 磁场优化设计需要综合考虑多个因素,如磁场强度、磁场均匀性、电机结构等。
需要进行综合分析和优化。
六、拟定计划1. 第一阶段:研究永磁球形电动机的基础理论和磁场学知识,阅读相关文献,学习SolidWorks和ANSYS等软件的相关操作和使用方法,建立Halbach阵列永磁球形电动机三维模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
r2
d2 R dR +2r -l(l+1)R 0 ,通解为: dr dr 2
R (r) =Ar l +D
1 r l+1
(16)
其中,A 和 D 的值由磁场边界条件确定。而对于右端,其形式为球谐函数方程,解其可得: 120
m Yl ( ,) =
2l+1 (l-m)! m Pl (cos) eim (17) 4 (l+m)!
r2 乘各项,可得: RY
1 d 2 dR 1 Y 1 2Y (15) (r ) =(sin )2 R dr dr Y sin Ysin 2
115
令式(15)左右两端均等于 l(l+1),要使勒让德方程在 -1,1 上有有限级数解,则 l 为 整数,取自集合(0,1,2,„,∞)。对于左端,其形式为标准欧拉方程
3 磁场分析(Magnetic filed analysis)
3.1 磁场分区 65 本文分析了一种转子上安装有双层永磁体的直流永磁球型电机的空间磁场分布, 双层永 磁体拥有类似于贝壳的形状,这样,就可以和转子壳一起形成一个类似于球的形状。 本文将转子空间分为三个区域,第一区域为转子外部的空气区域,第二区域为转子永磁 体的区域,第三区域为永磁体内部的由软铁物质构成的转子球壳。 对于线性并且各向同性的介质,当介质中场强不是很大时,其磁感应强度方程为: 70
B= H
软铁中: =0 r ,其中 r 为软铁物质的相对磁导率。
(1)
=0 ; 其中, B 为磁感应强度, H 为磁场强度, 根据电磁场理论, 空气中: 为物质的磁导率。
75
与线性磁介质相比,铁磁性物质存在磁滞回线。简单的说,就是当撤去外磁场后,铁 磁性物质仍然会存在磁感应强度,这个现象成为剩磁现象,这也是制作永磁体的原理。 对于稀土永磁体,磁感应强度方程应修改为:
中国科技论文在线
三自由度永磁球形电机磁场分析#
陈伟海,刘岩,张良*
5 (北京航空航天大学自动化科学与电气工程学院) 摘要: 提出了一种直流永磁球形电机整体结构的设计理念。 为了减小球形电机运动环节产生 的摩擦力,针对球形电机结构特点,设计了采用基于十字轴结构的运动装置。并结合编码器 以及倾角传感器, 提出了在球形电机内部可实现三位置检测的设计思路。 为了得到球形电机 的力矩输出与线圈激励的关系, 对球形电机进行了磁场分析, 利用麦克斯韦定律建立标量磁 位的拉普拉斯方程, 求解方程并利用边界条件得到空间磁场分布表达式。 其结果可为进一步 的研究和实验方案设计提供借鉴和参考。 关键词:球形电机;机构设计;磁场分析 中图分类号:TM 359.9
H=0
根据标量磁位 的定义,
H=-
85 其中 为哈密顿算子。
由于所分析的磁场空间为球形,故需对式(5)进行变形,将其转化为球坐标系下的表达 =x e x +ye y +ze z ,对于笛卡尔坐标系中的一小段曲线进行平方 式。设一矢量 K=(x,y,z) 可表示为:
d 2s=d 2 x+d 2 y+d 2 z
B=0 m H +0 M0
(2)
其中, m 为稀土物质的相对磁导率; Brem =0 M 0 为剩磁磁通密度,它代表了永磁体的
-2-
中国科技论文在线
磁感应强度大小。
根据麦克斯韦方程(MaxWell),在这三个区域中,均不存在电流源,即: 80 磁场强度为无旋量,即: J=0 (3) (4) (5)
50
如图 1 所示,转子上均匀安装有 8 个圆柱型永磁体,定子壳内部安装有双层线圈,对线 圈通以直流电, 导线中通电, 那么导体中就有无数的运动电荷, 运动的电荷产生变化的电场, 变化的电场会产生磁场,磁场方向用右手螺旋定则可以判断得出。根据这一原理,可以将通 电线圈视为圆柱型磁体,极性由直流电的方向决定。同性的磁极会产生相互排斥的作用力, 相反,异性的磁极会产生相互吸引的作用力,利用这一原理,通过对球面上经度相同的上下 层相对的两个定子线圈通以方向相反的电流, 就可以使一个线圈吸引转子球赤道面上的永磁 体,而另一个线圈排斥此永磁体,这样就可以在球型电机的转子上产生倾斜力矩,推动转子 实现倾斜运动。
K K K 2 d s=dK dK=( dr+ d + d) r
2
(8)
95
又可知,r 、φ 、θ 为正交坐标系,故式(8)分解后, drd 、 drd 、 d d 项的系数均为 “0”。可将式(8)简化为:
d 2s=d 2 r+r 2 d 2 +r 2 sin d 2
20
25
1 引言(Introduction)
30 随着机器人及各种工业技术的发展, 多自由度的关节运动装置已经被广泛应用于各种机 械结构中,但这种装置需要由多个传统单自由度驱动器及复杂的机械传动机构组成。对此国 内外许多学者提出了球形电机的概念,传统上,球电机的支撑机构有采用面接触的,也有采 用球轴承支撑的[1-6]。但是,摩擦力过大,使得球电机的实用性大打折扣。本文采用基于十 字轴结构的运动装置,解决了以上机械设计中存在的种种不足。 35 对直流永磁球形电机进行运动控制,就需要得到空间磁场的分布情况,对球形电机空间 磁场的分析就成为了必须要研究的问题。 综合而言,球形电机的研究离不开检测装置和磁场和的研究工作,因此,这部分工作内 容对后续的研究工作有着很大的帮助。
-1-
中国科技论文在线
Tilting motion 1 PM Rotor Coil Rotor shaft Tilting motion 2 Stator Spinning motion
45
Fig.1
图 1 球形电机模型 model for spherical actuator
对于磁场第一、三区域,将其代入式(3.1)中,可得: 105 其中, 2 为拉普拉斯算子。 对于第二区域,将式(11)代入式(2)中,可得:
2 = M 0
2 =0
(11) (12)
m
(13)Biblioteka -3-中国科技论文在线
110 式(12)的形式。 标量磁位的拉普拉斯方程在球坐标系下的表达式为:
(6)
90
对于矢量 K,根据球坐标与笛卡尔坐标的转换关系,求其在球坐标系三个坐标 r 、φ 、 θ 求偏导数,可求出参数曲线对应的切向量: K =(sin cos , sin sin , cos ) r K =(r cos cos ,r cos sin , -r sin ) (7) K =(rsin sin ,r cos cos ,) 0 而:
Coil 9/21 8/20 7/19 6/18 Stator N 5/17
S
S
10/22
N
Rotor
N
y
4/16
11/23 12/24
N
S
3/15 2/14 Label of coils
S
1/13
x
55
Fig.2
图 2 连续旋转运动示意图 The chart of the continuous spinning motion
综合式(16)和式(17)可得标量磁位的表达式:
=
l=0
m=-l
m l m -(l+1) m Yl ( ,) Al r +Dl r
l
(18)
其中, Alm 和 Dlm 分别为 Klm A 和 K lm D , K lm 为球谐函数通解中的待定常数,同样由磁 场边界条件确定。 125 根据数学物理方法中的相关内容可知[10], 永磁体剩磁矢量 M or 满足球谐函数边界条件, 故 M or 可展开为本征值问题。故:
2 永磁球形电机结构设计(Mechanical Structure)
40 借鉴各国学者们在之前提出的电机模形, 本文提出了一种具有双层定子线圈和单层永磁 体结构的直流永磁球形电机。 这种球形电机是利用通电导线与磁场的相互作的电磁原理工作 的。
基金项目:高等学校博士学科点专项科研基金(20101102110006). 作者简介:陈伟海(1955-),男,教授,博士生导师,主要研究方向为机器人技术、电机设计. E-mail: whchenbuaa@
(5)转化为球坐标系下的表达式: 100 3.2 拉普拉斯方程的求解 由于静磁场属于无散场,因此:
H=- =-
(9)
这样,就得到了曲线在球坐标系下的表达式,将其与笛卡尔坐标系进行比较,可以将式
1 1 er +e +e (10) r r r sin
B=0
60
如图 2 所示, 在任意时刻, 对球型电机转子上某一永磁体同一纬线上相邻的两个定子线 圈通以方向相反的直流电, 就可以使其中一个线圈吸引转子球赤道面上的永磁体, 而另一个 线圈排斥此永磁体, 可以在球型电机的转子上产生旋转力矩, 当对所有的线圈通以激励电流 后,即可实现球型电机的的转子产生绕输出轴的旋转运动。根据每一不同的位置,使电流控 制器对各个线圈输出不同的电流大小和方向,球型电机即可以实现连续的旋转运动。
10
15
The Magnetic Field Analysis of a Spherical motor
Chen Weihai, Liu Yan, Zhang Liang
(School of Automation Science and Electrical Engineering, Beihang University) Abstract: This paper has presented a design concept of a direct-current permanent magnetic spherical actuator. In order to reduce the friction of the spherical actuator, we design a locomotion mechanical device which is based on the omni-directional axis. Combined with the encoder and rotation sensor, the device we proposed is able to measure the three dimensional orientation of the rotor. In order to obtain the relationship between the torque output and current input, we first analyze the magnetic field distribution of the spherical actuator. Magnetic scalar potential is obtained according to the magnetic properties of rotor materials. With appropriate boundary conditions, the magnetic scalar potential is solved analytically. The result can be a reference for the future research and experimental design. Key words: spherical actuator; mechanical design;magnetic filed analysis