GPS DGPS卫星导航系统
GPS(全球定位系统)详解

GPS(全球定位系统)详解GPS(全球定位系统)详解2007-07-16 09:04:01| 剑必亮的博客1。
什么是全球定位系统(GPS)全球定位系统(GlobalPositioningSystem-GPS)是美国从本世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。
经近10年我国测绘等部门的使用表明,GPS 以全天候、高精度、自动化、高效益等显著特点,赢得广大测绘工作者的信赖,并成功地应用于大地测量、工程测量、航空摄影测量、运载工具导航和管制、地壳运动监测、工程变形监测、资源勘察、地球动力学等多种学科,从而给测绘领域带来一场深刻的技术革命。
全球定位系统(GlobalPositioningSystem,缩写GPS)是美国第二代卫星导航系统。
是在子午仪卫星导航系统的基础上发展起来的,它采纳了子午仪系统的成功经验。
和子午仪系统一样,全球定位系统由空间部分、地面监控部分和用户接收机三大部分组成。
按目前的方案,全球定位系统的空间部分使用24颗高度约2。
02万千米的卫星组成卫星星座。
21+3颗卫星均为近圆形轨道,运行周期约为11小时58分,分布在六个轨道面上(每轨道面四颗),轨道倾角为55度。
卫星的分布使得在全球的任何地方,任何时间都可观测到四颗以上的卫星,并能保持良好定位解算精度的几何图形(DOP)。
这就提供了在时间上连续的全球导航能力。
地面监控部分包括四个监控间、一个上行注入站和一个主控站。
监控站设有GPS用户接收机、原子钟、收集当地气象数据的传感器和进行数据初步处理的计算机。
监控站的主要任务是取得卫星观测数据并将这些数据传送至主控站。
主控站设在范登堡空军基地。
它对地面监控部实行全面控制。
主控站主要任务是收集各监控站对GPS卫星的全部观测数据,利用这些数据计算每颗GPS卫星的轨道和卫星钟改正值。
上行注入站也设在范登堡空军基地。
SBAS,GBAS,ABAS

SBAS,GBAS,ABASSBAS :星基增强系统(DGNSS/DGPS/WAAS/EGNOS)是利用地球静止轨道卫星建立的地区性广域差分增强系统。
目前全球发展的SBAS系统有:欧空局接收卫星导航系统(EGNOS),覆盖欧洲大陆;美国的DGPS(Differential GPS),美国雷声公司的广域增强系统(WAAS),覆盖美洲大陆;日本的多功能卫星增强系统(MSAS),覆盖亚洲大陆;印度的GPS辅助型静地轨道增强导航(GAGAN)。
具有完全兼容的互操作性。
其特点是:1、通过地球静止卫星(GEO)发布包括GPS卫星星历误差改正、卫星钟差改正和电离层改的信息;2、通过GEO卫星发播GPS和GEO卫星完整的数据;3、GEO卫星的导航载荷发射GPS L1测距信号。
以卫星为基地的延伸系统( SBAS )是用来扩充GPS及GLONASS (及2008年之后的伽利略系统)的功能。
它本身不能單獨存在,藉由幾個地球同步衛星的協助,將所有的修正數據整合在GPS或GLONASS信號之中,這些修正數據從同步衛星以GPS頻率向地球傳送。
SBAS是GPS的改善。
因爲它提高了定位信息準確度及可靠度。
相對GPS而言SBAS增加了从数个同步卫星向地球的广播信号以下是它的功能特性:利用修正数据提高定位准确度:SBAS提供差分修正數據,改善GPS的定位準確度。
首先必須修正的是信號通過離子層導致的延遲,離子層誤差在一天的每個時段,及每個區域都不同。
爲保證數據的正確,需要操作一個由許多地球監控站構成的複雜網絡,以便持續對離子層誤差做修正。
除離子層修正數值外,SBAS也傳送衛星位置(星历)及时间测量的修正信息增加整合性及安全性:SBAS 監視每一個GPS衛星,在衛星誤差或失效時,盡可能在6秒之前提示使用者。
這種可/不可的信息只有在接收信號品質低于規格限定之下時傳送。
通过导航信息的广播提高可靠度:SBAS同步(GEO)卫星发射的信号与GPS信号(伪路径)类似,GPS接收器可以解读此信号虽然卫星基地延伸系统(SBAS )可以涵盖较大地区(例如整个欧洲),重要的是它们彼此之间要能共容(操作的互通性),及与星基增强系统的操作能彼此配合。
全球有哪四大卫星导航系统
全球有哪四大卫星导航系统全球有哪四大卫星导航系统四大卫星导航系统分别为:美国全球定位系统(GPS)、俄罗斯“格洛纳斯”系统、欧洲“伽利略”系统、中国“北斗”系统。
1、美国全球定位系统(GPS)GPS是美国从20世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位功能的新一代卫星导航与定位系统。
经近10年我国测绘等部门的使用表明,GPS以全天候、高精度、自动化、高效益等显著特点,赢得了广大测绘工作者的信赖,并成功地应用于大地测量、工程测量、航空摄影测量、运载工具导航和管制、地壳运动监测、工程变形监测、资源勘察、地球动力学等多种学科中,从而给测绘领域带来了一场深刻的技术革命。
2、俄罗斯“格洛纳斯”系统该系统最早开发于苏联时期,后由俄罗斯继续该计划。
俄罗斯1993年开始独自建立本国的全球卫星导航系统。
该系统于2007年开始运营,当时只开放俄罗斯境内卫星定位及导航服务。
到2009年,其服务范围已经拓展到全球。
该系统主要服务内容包括确定陆地、海上及空中目标的坐标及运动速度信息等。
3、欧洲“伽利略”系统伽利略卫星导航系统,是由欧盟研制和建立的全球卫星导航定位系统,该计划于1999年2月由欧洲委员会公布,欧洲委员会和欧空局共同负责。
系统由轨道高度为23616km的30颗卫星组成,其中27颗工作星,3颗备份星。
卫星轨道高度约2.4万公里,位于3个倾角为56度的轨道平面内。
截止2016年12月,已经发射了18颗工作卫星,具备了早期操作能力(EOC),并计划在2019年具备完全操作能力(FOC)。
4、中国“北斗”系统中国北斗卫星导航系统(英文名称:BeiDou Navigation Satellite System,简称BDS)是中国自行研制的全球卫星导航系统。
北斗卫星导航系统由空间段、地面段和用户段三部分组成,可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务,并具短报文通信能力,已经初步具备区域导航、定位和授时能力,定位精度10米,测速精度0.2米/秒,授时精度10纳秒。
G P S

实时中远货运的GPS系统
• 例1:一次,货运汽车在上海卸完货,计 划在舟山装冷藏海鲜返回北京,调度中心 的地图上已经见到车辆即将到舟山的摆渡 码头。此时,客户突然通知取消此业务, 通过系统马上通知司机结束任务返回,避 免了四千元的摆渡费的浪费.
案例:中远货运的GPS系统
GPS的特点
• 定位精度高 • 观测时间短 • 操作简单 • 全天候工作 • 功能多、应用广
GPS在连锁经营中的应用
• 合理调度控制车辆 • 实时查询商品信息 • 进行车辆、船舶的全程跟踪 • 信息传递和查询 • 优化配送路线,支持管理 • 及时报警求助 • 及时了解车辆当时的位置动态,对车辆进行
连锁经营管理原理和实务
GPS—— Global Positioning System
• 全球定位系统。 • 是20世纪70年代美国海陆空三军联合研制出的
一种空间卫星导航定位系统。 • 它是利用分布在2万公里高空的多颗人造卫星,
对地面或接近地面的目标进行定位(包括移动 速度和方向)和导航的系统。具有在海、陆、 空进行全方位实时三维导航与定位能力。 • GPS在物流领域可用于运输工具的跟踪,提供 出行路线的规划和导航,并提供查询和报警功 能。地面指挥中心可随时与被跟踪目标通话, 实行管理,或紧急援助。 • 有三部分组成:地面控制部分、空间部分(24 颗卫星)、用户装置部分(GPS接收机+卫星天 线)
• 例2:有一个客户临时需要增加一车去广东的货物,却 只有一个司机,通过GPS定位系统,监控到有另外一辆 货车正从上海驶向终点郑州,及时通知即将到达郑州的 运货汽车,车辆由北京一个司机驾驶启程,到达郑州后 和另一个司机会合,完成了到广州的临时货运任务,避 免了增加司机或推迟起运的损失。
连锁经营管理原理和实务
DGPS,AGPS,GPSONE知识详解

DGPS,AGPS,GPSONE知识详解elewin Post at 2010-5-27 18:18:44DGPS(Difference Global Positioning System英文单词的缩写),即差分全球定位系统。
由于当前GPS全球卫星定位系统精度不能满足人们定位导航的需要,因此,研究人员提出了差分定位系统的概念。
其方法是在已精确测定坐标的参照物上设置GPS接收机,并和移动台上的GPS接DGPS知识详解什么是DGPS?DGPS(Difference Global Positioning System英文单词的缩写),即差分全球定位系统。
由于当前GPS全球卫星定位系统精度不能满足人们定位导航的需要,因此,研究人员提出了差分定位系统的概念。
其方法是在已精确测定坐标的参照物上设置GPS接收机,并和移动台上的GPS接收机同步观测不少于四颗的同一组卫星,求得该时刻的差分修正数(位置差分、伪距差分、相位平滑伪距差分和相位差分等修正数),通过无线电数据链把这些改正数实时播发给在附近工作的移动台(用户)或事后传送给移动台(用户),由移动台(用户)用所收到的差分改正数对其GPS定位数据进行实时修正,其目的是消除公共误差项,有效地减弱相关误差的影响,进而获得更精确的定位结果,提高定位精度。
DGPS相对于GPS能为用户的导航定位精度带来数量级的提高,在飞机精密进场着陆、无人机、弹道轨迹测量、车辆定位导航等航空、航天、航海及车载领域得到应用。
DGPS的分类DGPS是克服SA的不利影响,提高GPS定位精度的有效手段,可达到Ⅲ级及以上精度。
根据DGPS基准站发送的信息方式可将差分GPS定位分为三类,即:位置差分、伪距差分和相位差分。
根据DGPS的区域一般可分为区域DGPS、广域DGPS和全球DGPS,目前,全球DGPS正在探索中。
位置差分、伪距差分和相位差分这三类差分方式的工作原理是相同的,都是由基准站发送修正数,由用户站接收并对其测量结果进行改正,以获得精确的定位结果。
DGPS原理以及GPS系统的特点知识介绍

DGPS原理以及GPS系统的特点知识介绍DGPS原理目前GPS系统提供的定位精度是优于10米,而为得到更高的定位精度,我们通常采用差分GPS技术:将一台GPS接收机安置在基准站上进行观测。
根据基准站已知精密坐标,计算出基准站到卫星的距离改正数,并由基准站实时将这一数据发送出去。
用户接收机在进行GPS观测的同时,也接收到基准站发出的改正数,并对其定位结果进行改正,从而提高定位精度。
差分GPS分为两大类:伪距差分和载波相位差分1.伪距差分原理这是应用最广的一种差分。
在基准站上,观测所有卫星,根据基准站已知坐标和各卫星的坐标,求出每颗卫星每一时刻到基准站的真实距离。
再与测得的伪距比较,得出伪距改正数,将其传输至用户接收机,提高定位精度。
这种差分,能得到米级定位精度,如沿海广泛使用的“信标差分”2.载波相位差分原理载波相位差分技术又称RTK(Real Time Kinematic)技术,是实时处理两个测站载波相位观测量的差分方法。
即是将基准站采集的载波相位发给用户接收机,进行求差解算坐标。
载波相位差分可使定位精度达到厘米级。
大量应用于动态需要高精度位置的领域。
GPS系统的特点GPS系统具有全天候、全方位、高精度、多用途以及方便快捷高效等特点。
1)全天候:指野外观测可不受时间的限制。
不论白天黑夜、刮风下雨、夏暖冬寒,均可获得满意的观测效果。
2)全方位:指野外作业不受空间的限制,只要能同时接收到四颗以上卫星的信号,即可进行定位。
不要求测站间互相通视,可在陆地、海上、水上、空中(航测)测量定位。
既可静态观测,也可动态观测。
3)高精度:单频GPS接收机静态测量(后处理)精度可达±5mm+2ppm·D。
双频GPS 接收机静态测量精度可达±5mm+1ppm·D。
实时动态测量(RTK)精度可达±20mm+2ppm·D。
4)多用途:不仅用于测量定位,还可用于导航以及测速和授时。
DGPSINS精密组合导航软件(GPSINSIGG 1.0)简介

)简介简介 DGPS/INS精密组合导航软件GPSINSIGG 1.0)(GPSINSIGG 1.0精密组合导航软件(柴艳菊,阳仁贵,王海涛,许厚泽,欧吉坤,袁运斌,钟世明(中国科学院测量与地球物理研究所,动力大地测量学重点实验室,湖北:武汉,430077)摘 要:GPS/INS组合导航系统是近年来发展起来的一项新的导航技术,在军民用领域具有广阔的应用前景。
经过近十几年的发展,我国在INS硬件方面取得长足发展,但是成熟的高精度组合数据处理软件的发展相对滞后,制约了组合导航技术在一些精密导航领域的推广。
精密组合导航技术的主要困难是GPS模糊度的动态解算及INS元件误差的建模。
中国科学院测量与地球物理研究所(下称“中科院测地所”)科研人员结合我所GPS精密数据处理长期经验的积累和优势,及我所GPS/INS组合系统最新研究成果[1-5],并参考目前国际上比较著名的几个GPS/INS组合软件及算法[6-11],研制了DGPS/INS精密组合导航软件(GPSINSIGG 1.0)。
该软件采用VC++和FORTRAN语言编写,具有GPS数据预处理及精密动态定位测速、INS单独导航、GPS/INS精密松组合及紧组合、导航结果绘图等功能。
其特色是采用我所提出的GPS 质量控制及模糊度快速搜索新方法,并在组合阶段采用附加系统存在的隐含信息约束思想,将GPS相位和doppler观测与INS数据进行融合,提高了导航结果的精度。
整个软件操作采用提示功能,界面友好。
作者利用多种精度的国产和进口INS和GPS组合数据对该软件进行了测试,结果比较可靠。
关键词:GPS/INS精密组合处理模糊度解算INS误差建模松组合紧组合1.概述GPSINSIGG 1.0是中科院测地所近几年研制的精密GPS/INS组合数据处理软件。
它集成了我所GPS和GPS/INS的方面相关的研究成果,适用于实时或事后处理GPS/INS组合数据处理。
该软件具有GPS预处理、GPS精密动态定位测速、INS初始对准和单独导航、GPS/INS松组合和紧组合等主要功能,对处理结果绘图、坐标转换等辅助功能。
dgps(差分全球定位系统)靠泊辅助系统的工作原理及应用

- 55 -第11期DGPS(差分全球定位系统)靠泊辅助系统的工作原理及应用周暐(海洋石油工程股份有限公司, 天津 300451)[摘 要] 介绍了DGPS靠泊辅助系统的工作原理,对比了该系统与其他靠泊辅助系统的区别he 特点,阐述了该系统在具体项目中的应用。
[关键词] DGPS靠泊辅助系统;油轮;应用作者简介:周暐(1983—),男,江苏常州人,研究生,中级职称。
海洋石油工程股份有限公司通讯工程师。
1 几种靠泊辅助系统的区别在靠泊辅助系统的研究过程中,曾先后出现过多种靠泊探测技术,其中,有声波靠泊辅助技术、雷达靠泊辅助技术、红外靠泊辅助技术、电磁波靠泊辅助技术等。
各种系统的技术原理不同,声波靠泊辅助技术主要有两个方面,一是空气声波靠泊技术,二是声呐靠泊技术。
空气声波靠泊技术原理是利用空气震动的传播来了解靠岸信息,而声纳靠泊技术原理为多普勒测速原理,在船舶逐渐靠近的过程中,系统发射超声波,经船舶反射后,由接收机接收并由内部核心系统计算,探测船舶的距离和速度。
根据对几种技术的分析比较,空气声波靠泊辅助技术在几种技术中最不稳定,声呐靠泊辅助技术作用于水下,对其产生的干扰主要来自水下声源和水下涌流。
电磁波辅助技术中激光的精度和稳定性比红外和雷达两种系统要好,但其寻找目标的能力较弱。
以上岸基式系统共同的不足主要有三方面:一是整套设备形体相对较大且沉重,维修不便;二是靠泊信息都在岸上大型显示牌显示,在能见度低的天气中应用效果较差;三是整套系统以码头为搭载平台,单套设备只能应用于单个泊位,且对船型和船舶大小的适应性较弱。
DGPS 靠泊辅助系统的核心技术是差分GPS 高精度定位技术,并通过采用实时动态差分法实现对船泊定位、转向角、航行速度等参数的计算。
与上述系统相比,基于DGPS 的靠泊辅助技术以引航员的便携式引航仪为搭载平台,应用更灵活,且精度高于或等于其它技术。
2 DGPS 靠泊辅助系统的功能及工作原理近年来,随着海洋石油开发领域的快速发展,DGPS 靠泊辅助系统逐渐在平台及作业船舶中配备。
全球四大卫星定位系统

全球四大卫星定位系统说起卫星定位导航系统,人们就会想到GPS,但是现在,伴随着众多卫星定位导航系统的兴起,全球卫星定位导航系统有了一个全新的称呼:GNSS(Global Navigation Satellite System)。
当前,在这一领域最吸引人眼球的要数美国的GPS卫星导航系统;此外,还有俄罗斯的“格洛纳斯”导航卫星系统,欧盟的“伽利略”导航卫星系统,以及我国自主开发的“北斗”导航卫星系统。
一、美国GPS系统GPS(Global Position System)全球定位系统是目前最成熟的卫星定位导航系统。
它是美国从上世纪70年代开始研制,历时20年,耗资近200亿美元,于1994年全面建成的新一代卫星导航与定位系统。
GPS利用导航卫星进行测时和测距,具有在海、陆、空全方位实时三维导航与定位能力。
它是继阿波罗登月计划、航天飞机后的美国第三大航天工程。
如今,GPS已经成为当今世界上最实用,也是应用最广泛的全球精密导航、指挥和调度系统。
GPS全球定位系统由空间系统、地面控制系统和用户系统三大部分组成。
其空间系统由21颗工作卫星和3颗备份卫星组成,分布在20200千米高的6个轨道平面上,运行周期12小时。
地球上任何地方任一时刻都能同时观测到4颗以上的卫星。
地面控制系统负责卫星的测轨和运行控制。
用户系统为各种用途的GPS 接收机,通过接收卫星广播信号来获取位置信息,该系统用户数量可以是无限的。
GPS全球定位系统是美国为军事目的而建立的。
1983年一架民用飞机在空中因被误以为是敌军飞机而遭击落后,美国承诺GPS免费开放供民间使用。
美国为军用和民用安排了不同的频段,并分别广播了P码和C/A码两种不同精度的位置信息。
目前美国军用GPS精度可达1米,而民用GPS理论精度只有10米左右。
特别地,美国在90代中期为了自身的安全考虑,在民用卫星信号上加入了SA (Selective Availability),进行人为扰码,这使得一般民用GPS接收机的精度只有100米左右。
差分GPS(DGPS)测量规范
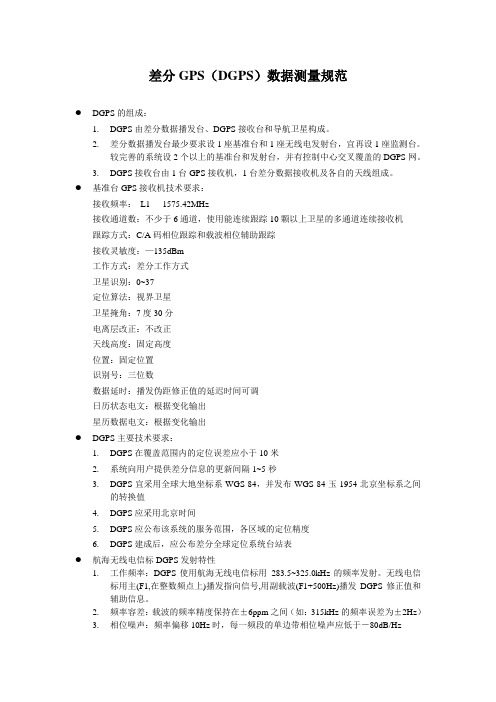
差分GPS(DGPS)数据测量规范●DGPS的组成:1.DGPS由差分数据播发台、DGPS接收台和导航卫星构成。
2.差分数据播发台最少要求设1座基准台和1座无线电发射台,宜再设1座监测台。
较完善的系统设2个以上的基准台和发射台,并有控制中心交叉覆盖的DGPS网。
3.DGPS接收台由1台GPS接收机,1台差分数据接收机及各自的天线组成。
●基准台GPS接收机技术要求:接收频率:L1 1575.42MHz接收通道数:不少于6通道,使用能连续跟踪10颗以上卫星的多通道连续接收机跟踪方式:C/A码相位跟踪和载波相位辅助跟踪接收灵敏度:—135dBm工作方式:差分工作方式卫星识别:0~37定位算法:视界卫星卫星掩角:7度30分电离层改正:不改正天线高度:固定高度位置:固定位置识别号:三位数数据延时:播发伪距修正值的延迟时间可调日历状态电文:根据变化输出星历数据电文:根据变化输出●DGPS主要技术要求:1.DGPS在覆盖范围内的定位误差应小于10米2.系统向用户提供差分信息的更新间隔1~5秒3.DGPS宜采用全球大地坐标系WGS-84,并发布WGS-84玉1954北京坐标系之间的转换值4.DGPS应采用北京时间5.DGPS应公布该系统的服务范围,各区域的定位精度6.DGPS建成后,应公布差分全球定位系统台站表●航海无线电信标DGPS发射特性1.工作频率:DGPS使用航海无线电信标用283.5~325.0kHz的频率发射。
无线电信标用主(F1,在整数频点上)播发指向信号,用副载波(F1+500Hz)播发DGPS修正值和辅助信息。
2.频率容差:载波的频率精度保持在±6ppm之间(如:315kHz的频率误差为±2Hz)3.相位噪声:频率偏移10Hz时,每一频段的单边带相位噪声应低于-80dB/Hz4.杂散输出:杂散输出应低于-60dB5.同步类型:电文以同步方式播发6.伪距修正值(PRC)延迟时间:播发修正值的平均延迟时间应小于0.25s7.调制方式:采用最小频率键控(MSK)调制,是一种连续的相位、频移键控(CPFSK)调制。
RBN-DGPS简介

1.1.1.RBN-DGPS系统我国沿海RBN-DGPS系统从1995年开始建设,分三期建成了沿海23座RBN-DGPS台站。
一期建成天津北塘站,秦皇岛站,大连大三山站,青岛王家麦站,长江口大戢山站和海南抱虎角站共6座台站,于1997年7月正式对公共用户提供服务。
二期建成连云港地区燕尾港站,温州地区石塘站,厦门地区镇海角站,汕头地区鹿屿站,珠海地区三灶站,湛江地区硇洲岛站,海南海域三亚站,共7座台站,于1999年9月正式开放,为公共用户提供服务。
三期建设的大连老铁山站,烟台成山头站,江苏蒿枝港站,宁波定海站,福州天达山站,广西防城站和海南洋浦站共7座台站,于2002年正式开放使用。
为完善信号覆盖,2009年又新建了营口和灵昆台站,2012年开始建设大亚湾台站,另外规划待建的还有西沙台站。
至今,从北至南,22座台站,形成从鸭绿江口至西沙群岛的系统台链,信号覆盖(或多重覆盖)沿海主要港口、重要水域和狭窄水道的DGPS导航服务网。
图错误!文档中没有指定样式的文字。
-1 中国沿海RBN-DGPS覆盖范围示意图系统对航行在我国沿海航线及进出港口船舶的准确定位,防止各类事故已经起到很好作用,尤其对港口建设施工、海洋开发、石油工程、航道测量、疏浚、航标布设、救助打捞等工作更为需要。
RBN-DGPS 系统已成为我国沿海水域准确定位的主要手段,是我国目前近海(300km以内)主要的定位、导航系统。
RBN-DGPS系统结构及设备功能如图2-1所示。
基准站包括基准台,播发台,完善性监测台与监控中心四部分。
图错误!文档中没有指定样式的文字。
-2 中国海事局RBN-DGPS基准站系统结构图基准台与播发台为双套设备,其中一套为热备份。
基准台(RS)的GPS天线安置在已知精确位置的地点,通过高性能GPS接收机跟踪视野内的所有卫星,计算出每颗卫星的伪距校正量,调制器采用最小移频键控(MSK)调制方式,将伪距校正量、基准台频率、识别码等信息,按照RTCM 104 2.1版本的格式要求,组成电文,一并传输给播发台。
浅析全球四大定位系统

浅析全球四大定位系统说起卫星定位导航系统,人们就会想到GPS,但是现在众多卫星定位导航系统也逐渐兴起。
当前,在这一领域最吸引人眼球的要数美国的GPS卫星导航系统;此外,还有俄罗斯的“格洛纳斯” 导航卫星系统,欧盟的“伽利略”导航卫星系统,以及我国自主开发的“北斗”导航卫星系统,它们并称“全球四大定位系统”。
美国GPS系统GPS(Global Position System)全球定位系统是目前最成熟的卫星定位导航系统。
它是美国从上世纪70年代开始研制,历时20年,耗资近200亿美元,于1994年全面建成的新一代卫星导航与定位系统。
GPS利用导航卫星进行测时和测距,具有在海、陆、空全方位实时三维导航与定位能力。
它是继阿波罗登月计划、航天飞机后的美国第三大航天工程。
如今,GPS已经成为当今世界上最实用,也是应用最广泛的全球精密导航、指挥和调度系统。
GPS全球定位系统由空间系统、地面控制系统和用户系统三大部分组成。
其空间系统由21颗工作卫星和3颗备份卫星组成,分布在20200千米高的6个轨道平面上,运行周期12小时。
地球上任何地方任一时刻都能同时观测到4颗以上的卫星。
地面控制系统负责卫星的测轨和运行控制。
用户系统为各种用途的GPS 接收机,通过接收卫星广播信号来获取位置信息,该系统用户数量可以是无限的。
GPS全球定位系统是美国为军事目的而建立的。
1983年一架民用飞机在空中因被误以为是敌军飞机而遭击落后,美国承诺GPS免费开放供民间使用。
美国为军用和民用安排了不同的频段,并分别广播了P码和C/A码两种不同精度的位置信息。
目前美国军用GPS精度可达1米,而民用GPS理论精度只有10米左右。
特别地,美国在90代中期为了自身的安全考虑,在民用卫星信号上加入了SA (Selective Availability),进行人为扰码,这使得一般民用GPS接收机的精度只有100米左右。
2000年5月2日,SA干扰被取消,全球的民用GPS接收机的定位精度在一夜之间提高了许多,大部分的情况下可以获得10米左右的定位精度。
四大导航系统
四大导航系统导航系统是现代社会中不可或缺的一部分。
它们帮助人们在城市中找到正确的路线,提供实时的交通信息,以及为旅行者提供方便的旅行路线。
随着技术的不断进步,现在有四种主要的导航系统:全球定位系统(GPS)、伽利略导航系统(Galileo)、伽马射线导航系统(GLONASS)和北斗导航系统(Beidou)。
每个系统都有其独特的优势和应用领域,下面将逐个介绍这四大导航系统。
全球定位系统(GPS)是最为人熟知的导航系统之一。
它由美国政府开发,可以在全球范围内提供定位、导航和定时服务。
GPS系统由一系列卫星和地面接收器组成。
卫星通过发送编码信号,地面接收器通过接收并解码这些信号来确定位置。
GPS系统具有高精度和较大的覆盖范围,适用于许多应用领域,如汽车导航、航空和航海等。
它已成为我们日常生活中不可或缺的一部分。
伽利略导航系统是欧盟和欧洲空间局共同开发的一种导航系统。
它的目标是提供独立的、高精度的位置信息,并为用户提供增强的位置服务。
伽利略系统与GPS系统类似,都由一系列卫星和地面接收器组成。
优势在于提供更高的精确度和更高的覆盖率。
伽利略系统的应用范围包括交通管理、军事应用和精密测量等领域。
该系统目前正在逐渐完善并投入使用。
伽马射线导航系统(GLONASS)是由前苏联开发的一种导航系统,目的是为战略和民用应用提供定位和导航服务。
GLONASS系统由一系列卫星和地面接收器组成,这些卫星分布在全球范围内。
它在设计上与GPS系统非常相似,但覆盖范围更广。
GLONASS系统主要用于军事和航空应用,但在一些地区也用于民用导航。
北斗导航系统(Beidou)是中国自主研发的导航系统。
它由一系列卫星和地面接收器组成,提供全球范围内的导航和定位服务。
北斗系统与其他导航系统相比,在覆盖范围和信号强度方面具有优势。
该系统不仅用于定位和导航,还可以提供其他增值服务,如天气预报和短信传递等。
北斗导航系统已经在中国国内得到广泛应用,计划逐步在全球范围内覆盖。
IMU、INS、DGPS和POS

IMU、INS、DGPS和POS惯性导航通过测量飞⾏器的加速度,并⾃动进⾏积分运算获得飞⾏器瞬时速度和瞬时位置数据的技术。
组成惯性导航系统的设备都安装在运载体内,⼯作时不依赖外界信息也不向外界辐射能量不易受到⼲扰,是⼀种⾃主式导航系统。
捷联式惯性导航系统省去了平台,所以结构简单、体积⼩、维护⽅便,但陀螺仪和加速度计直接装在飞⾏器上,⼯作条件不佳,会降低仪表的精度。
这种系统的加速度计输出的是机体坐标系的加速度分量,需要经计算机转换成导航坐标系的加速度分量,计算量较⼤。
IMU惯导测量单元⼀个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独⽴三轴的加速度信号,⽽陀螺检测载体相对于导航坐标系的⾓速度信号,测量物体在三维空间中的⾓速度和加速度,并以此解算出物体的姿态。
INS惯导系统 惯性导航系统是⼀种利⽤安装在运载体上的陀螺仪和加速度计来测定运载体位置的⼀个系统。
INS(惯性导航系统)与 IMU(惯性测量装置)有什么区别?定位(GPS)就是告诉你,你现在在哪。
导航就是告诉你,如何到你想要到的位置。
惯性导航你可以简单的理解成依靠惯性器件(陀螺、加速度计等)的原始数据加上固定的算法(很深奥的东西..)来输出你先要的信息,如位置,载体姿态,实时运动速什么是航空定位定向系统(POS)?导航定位定向系统(简称:POS系统)是通过全球导航卫星系统(GNSS)获取位置数据作为初始值,通过惯导系统(IMU)获取姿态变化增量,应⽤卡尔曼滤波器、反馈误差控制迭代运算,⽣成实时导航数据。
应⽤POS系统可以得到移动平台位置和姿态的轨迹数据。
能够实现直接地学定位,可以减少或省略空中三⾓测量的地⾯控制点。
可以与任何类型的量测类型的传感器(航摄像机、机载激光雷达(LIDAR)、⾼光谱成像仪、机载合成孔径雷达(SAR)和机载⼲涉雷达(InSAR)等)直接连接使⽤。
POS系统发展综述本⽂通过以下四个⽅⾯简单介绍POS系统:⼀、POS系统;⼆、POS系统发展历程;三、组合导航关键技术;四、POS系统发展⽅向;⼀、POS系统1.POS系统的定义:POS系统集惯性导航与卫星导航技术于⼀体,记录飞机飞⾏时空间位置及姿态信息,并采⽤多信息融合技术分别对 POS 系统进⾏实时与事后处理,获得⾼精度定位定向信息。
(完整版)GPS与北斗卫星导航系统
GPS与北斗卫星导航系统GPS简介GPS是英文Global Positioning System(全球定位系统)的简称。
GPS是20世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统。
其主要目的是为陆、海、空三大领域提供实时、全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的。
经过20余年的研究实验,耗资300亿美元,到1994年3月,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。
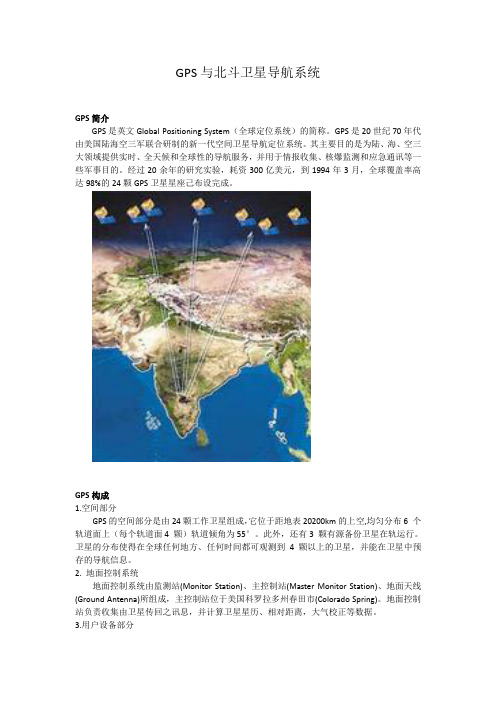
GPS构成1.空间部分GPS的空间部分是由24颗工作卫星组成,它位于距地表20200km的上空,均匀分布6 个轨道面上(每个轨道面4 颗)轨道倾角为55°。
此外,还有3 颗有源备份卫星在轨运行。
卫星的分布使得在全球任何地方、任何时间都可观测到4 颗以上的卫星,并能在卫星中预存的导航信息。
2. 地面控制系统地面控制系统由监测站(Monitor Station)、主控制站(Master Monitor Station)、地面天线(Ground Antenna)所组成,主控制站位于美国科罗拉多州春田市(Colorado Spring)。
地面控制站负责收集由卫星传回之讯息,并计算卫星星历、相对距离,大气校正等数据。
3.用户设备部分用户设备部分GPS信号接收机。
其主要功能是能够捕获到按一定卫星截止角所选择的待测卫星,并跟踪这些卫星的运行。
当接收机捕获到跟踪的卫星信号后,就可测量出接收天线至卫星的伪距离和距离的变化率,解调出卫星轨道参数等数据。
根据这些数据,接收机中的微处理计算机就可按定位解算方法进行定位计算,计算出用户所在地理位置的经纬度、高度、速度、时间等信息。
GPS定位原理GPS定位的基本原理是根据高速运动的卫星瞬间位置作为已知的起算数据,采用空间距离后方交会的方法,确定待测点的位置。
如图所示,假设t时刻在地面待测点上安置GPS 接收机,可以测定GPS信号到达接收机的时间△t,再加上接收机所接收到的卫星星历等其它数据可以确定以下四个方程式。
LBS,GPSONE,AGPS,DGPS是什么意思有什么区别

LBS,GPSONE,AGPS,DGPS是什么意思,有什么区别作者:德宝科技LBS (Location Based Service) 即移动位置服务,它是通过电信移动运营商的GSM或CDMA网络和卫星定位系统结合在一起获取移动终端用户的经纬度坐标等位置信息,在电子地图平台的支持下,为用户提供相应服务的一种增值业务。
LBS要求基站的覆盖率高。
不但要求覆盖的范围足够大,还要求覆盖的范围包括室内。
LBS的定位精度一方面与采用的定位技术有关,另一方面还取决于提供业务的外部环境,包括无线电传播环境、基站的密度和地理位置、以及定位所用设备等。
GPSONE是美国高通公司为基于位置业务开发的定位技术,采用Client/Server方式。
它将无线辅助AGPS和高级前向链路AFL T三角定位法两种定位技术有机结合,实现高精度、高可用性和较高速度定位。
在这两种定位技术均无法使用的环境中,GPSONE会自动切换到Cell ID扇区定位方式,确保定位成功率。
GPSONE是基于CDMA网络的定位技术。
在移动通信网络中,通常有以下几种定位技术: 一是基于Cell ID的定位技术,它由网络侧获取用户当前所在的基站Cell 信息以获取用户当前位置,其精度取决于移动基站的分布及覆盖范围的大小; 二是基于AFL T的定位技术,AFL T(Advanced Forward Link Trilateration)是CDMA独有的技术,在定位操作时,手机/终端同时监听多个基站的导频信息,利用码片时延来确定到附近基站的距离,最后用三角定位法算出具体位置; 三是基于AGPS(无线网络辅助GPS定位技术)的定位技术,AGPS将终端的工作简化,由网络侧的定位服务器与终端相互配合完成定位工作,就是将卫星扫描及定位运算等最为繁重的工作从终端一侧转移到网络一侧的定位服务器完成。
AGPS(Assisted GPS的缩写),即辅助GPS定位系统。
AGPS全称是网络辅助的GPS定位系统,在手机定位及跟踪定位设备中有着广泛的应用。
卫星导航系统的原理

卫星导航系统的原理卫星导航系统作为现代科技的重要组成部分,已经深刻地改变了人们的生活和工作方式。
从日常出行到军事作战,从快递物流到自然灾害监测,卫星导航系统在各个领域发挥着不可替代的作用。
本文将对卫星导航系统的原理进行详尽的探讨,揭示其背后的科学与技术原理。
卫星导航系统概述卫星导航系统是利用地球上空的卫星和地面接收设备,通过无线电信号通信,提供有关位置、速度、时间等信息的一种技术。
它可以被广泛用于运输、通信、地理信息系统等多个领域。
常见的卫星导航系统包括美国的全球定位系统(GPS)、俄罗斯的格罗纳斯系统(GLONASS)、欧洲的伽利略导航系统(Galileo)以及中国的北斗系统(BeiDou)。
卫星导航系统的组成卫星导航系统主要由三大部分组成:空间 segment、地面segment和用户 segment。
空间 segment:包括若干颗运行于特定轨道的卫星,这些卫星通过无线电信号向地面发送位置信息和时间信息。
地面 segment:主要负责监控和管理在轨卫星,包括对卫星的运行状态进行监测、数据传输以及定期更新卫星位置等功能。
用户 segment:指用户所使用的接收设备,如智能手机、车辆导航仪等。
这些设备能够接收来自卫星的信息并进行处理,从而提供定位、导航及授时服务。
卫星导航的工作原理基本原理卫星导航系统的核心原理是三角测量法,即通过已知点来计算未知点的位置。
在具体实施过程中,接收器需要从多个卫星获取位置信息,并利用这些信息来确定自己的位置。
下面将详细探讨这一过程。
定位过程时间同步:每颗卫星在发射信号时,会附带自身位置及准确时间信息。
信号传播至地面接收器需要一定时间,因此解决定位问题需要精确到纳秒级别。
这就要求接收器内部也必须有高精度时钟,以确保时间同步。
距离计算:通过计算信号传播时间,可以得出地面接收器与每颗卫星之间的距离。
公式为: [ 距离 = 光速信号传播时间 ] 由于光速是已知常数,因此只需计算传输时间就可得出与每颗卫星的距离。
机载DGPS INS组合导航系统研究

机载DGPS INS组合导航系统研究摘要:随着飞机机动性的增大和航程的加长,单一的导航系统已经无法满足机载导航要求。
解决问题的方法是采用组合导航系统,本文设计了一种基于DGPS/INS的组合导航系统,系统满足高精度、长航时、高可靠性的要求。
关键词:组合导航系统DGPS/INSDGPS是一种高精度和高实时性的GPS实用模式。
DGPS与INS 相互组合,取长补短,可以显著提高导航系统精度。
组合系统的主要优点是可以实现惯导系统的空中校准和高度通道的稳定,同时惯导系统的辅助可以提高GPS跟踪卫星的能力,从而提高接收机的动态特性和抗干扰性。
1 系统的总体框架图1系统工作原理:在飞行的过程中,利用GPS接收机的双频天线所测得的数据产生差分修正值,来减少DGPS接收机的误差,提高定位精度。
DGPS接收机将所测得定位数据进行修正后,将飞机动态参数信息传递给导航处理机,同时惯导系统将陀螺仪和加速度计测量的数据传输给导航处理机进行捷联解算,并且和DGPS数据进行信息融合,然后在显示器显示飞机的位置、速度、高度、姿态等导航数据。
2 导航系统硬件设计图2整个导航信息处理板可划分为五个部分:GPS导航模块、惯性导航模块、温度补偿模块、数据融合与解算模块、数据显示模块。
2.1 GPS导航模块GPS模块采用双天线DGPS接收机,在飞机的机头和机尾方向安装两个反馈天线,以差分测量的方式提高GPS定位精度,达到飞机导航定位的要求。
本系统选取美国JA V AD公司生产的Duo-G2D接收机,它可以同时接入最多两个天线,DGPS定位精度可达0.5m,数据更新率最大100 Hz。
GPS接收机输出的是RS232电平,所以经过MAX232芯片处理后转化为TTL电平,由FPGA采集完数据后输送给DSP等待信息融合。
2.2 惯性导航模块惯性导航模块主要是包括陀螺仪和加速度计两部分。
光纤陀螺仪输出的数据已经是数字式的,不存在模数转换的问题;而加速度计需要经过模数转换来完成信号输出。
各国卫星导航系统比较(北斗、伽利略、GLONASS、GPS)

北斗卫星导航系统简介卫星导航系统是重要的空间基础设施,为人类带来了巨大的社会经济效益。
中国作为发展中国家,拥有广阔的领土和海域,高度重视卫星导航系统的建设,努力探索和发展拥有自主知识产权的卫星导航定位系统。
2000年以来,中国已成功发射了4颗“北斗导航试验卫星”,建成北斗导航试验系统(第一代系统)。
这个系统具备在中国及其周边地区范围内的定位、授时、报文和GPS广域差分功能,并已在测绘、电信、水利、交通运输、渔业、勘探、森林防火和国家安全等诸多领域逐步发挥重要作用。
中国正在建设的北斗卫星导航系统空间段由5颗静止轨道卫星和30颗非静止轨道卫星组成,提供两种服务方式,即开放服务和授权服务(属于第二代系统)。
开放服务是在服务区免费提供定位、测速和授时服务,定位精度为10米,授时精度为50纳秒,测速精度0.2米/秒。
授权服务是向授权用户提供更安全的定位、测速、授时和通信服务以及系统完好性信息。
中国计划2007年初发射两颗北斗导航卫星,2008年左右满足中国及周边地区用户对卫星导航系统的需求,并进行系统组网和试验,逐步扩展为全球卫星导航系统。
伽利略卫星导航系统简介数量:30颗中高度圆轨道卫星组成,27颗为工作卫星,3颗为候补;轨道:高度为24126公里,位于3个倾角为56度的轨道平面内;精度:最高精度小于1米;用途:主要为民用;1999年2月10日,欧盟执行机构欧洲委员会(EC)公布了欧洲导航卫星系统“伽利略”计划,该系统是与美国全球导航定位系统(GPS)和俄罗斯的GLONASS系统兼容的民用全球定位卫星系统。
欧盟之所以进行“伽利略”计划,主要是为了摆脱对美国GPS系统的依赖,打破美国对全球卫星导航定位产业的垄断,在使欧洲获得工业和商业效益的同时,赢得建立欧洲共同安全防务体系的条件。
其实,欧空局(ESA)早在1990年就决定研制“全球导航卫星系统(GNSS)”,GNSS分为两个阶段,第一阶段是建立一个与美国GPS系统、俄罗斯GLONASS系统、以及三种区域增强系统均能相容的第一代全球导航卫星系统(GNSS-1),第二阶段是建立一个完全独立于GPS系统和GLONASS系统之外的第二代全球导航卫星系统(GNSS-2)。
航海仪器题库(旧)

第七章航海仪器7.1 现代定位电子仪器7.1.2 GPS/DGPS卫星导航系统7.1.2.1 GPS/DGPS卫星导航系统工作原理、精度及在航海上的使用注意事项2713. GPS卫星导航系统分为距离型、多普勒型和距离多普勒混合型系指按分类。
A.工作方式B.工作原理C.测量的导航定位参量D.用户获得的导航定位数据2714. GPS卫星导航系统是导航系统。
A. 近距离B.远距离C.中距离D.全球2715. GPS卫星导航系统是一种卫星导航系统。
A.多普勒B.测距C.有源D.测角2716. GPS卫星导航仪可为定位。
A.水上、水下B.水下、空中C.水面、海底D.水面、空中2717. 卫星的导航范围可延伸到外层空间,指的是从。
A.地面B.水面C.近地空间D.A+B+C2718. GPS卫星导航系统可为船舶在。
A.江河、湖泊提供定位与导航B.港口及狭窄水道提供定位与导航C.近海及远洋提供定位与导航D.A+B+C2719. GPS卫星导航仪可为。
A.水下定位B.水面定位C.水面、空中定位D.水下、水面、空中定位2720. GPS卫星导航可提供全球、全天候、高精度、。
A.连续、不实时定位与导航B.连续、近于实时定位与导航C.间断、不实时定位与导航D.间断、近于实时定位与导航2721. GPS卫星导航系统可提供全球、全天侯、高精度、连续导航。
A.不实时B.近于实时C.水下、水面D.水下、水面、空中2722. GPS卫星导航系统可提供全球全天侯高精度导航。
A.不实时B.连续近于实时C.间断不实时D.间断近于实时2723. GPS卫星导航系统与NNSS卫星导航系统相比较,其优点是。
A.连续定位B.定位精度高C.定位时间短D.A+B+C2724. GPS卫星导航系统由部分组成。
A.2B.3C.4D.52725. GPS卫星导航系统由颗卫星组成。
A.24B.18C.30D.482726. GPS卫星分布在个轨道上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPS/DGPS卫星导航系统7.1.2.1 GPS/DGPS卫星导航系统工作原理、精度及在航海上的使用注意事项2713 GPS卫星导航系统分为距离型、多普勒型和距离多普勒混合型系指按____分类。
A.工作方式 B.工作原理C.测量的导航定位参量 D.用户获得的导航定位数据2714 GPS卫星导航系统是__________导航系统。
A. 近距离 B.远距离 C.中距离 D.全球2715 GPS卫星导航系统是一种__________卫星导航系统A.多普勒 B.测距 C.有源 D.测角2716 GPS卫星导航仪可为__________定位。
A.水上、水下 B.水下、空中 C.水面、海底 D.水面、空中2717 卫星的导航范围可延伸到外层空间,指的是从__________。
A.地面 B.水面 C.近地空间 D.A+B+C2718 GPS卫星导航系统可为船舶在__________。
A.江河、湖泊提供定位与导航 B.港口及狭窄水道提供定位与导航C.近海及远洋提供定位与导航 D.A+B+C2719 GPS卫星导航仪可为__________。
A.水下定位 B.水面定位 C.水面、空中定位 D.水下、水面、空中定位2720 GPS卫星导航可提供全球、全天候、高精度、__________。
A.连续、不实时定位与导航 B.连续、近于实时定位与导航C.间断、不实时定位与导航 D.间断、近于实时定位与导航2721 GPS卫星导航系统可提供全球、全天侯、高精度、连续__________导航。
A.不实时 B.近于实时 C.水下、水面 D.水下、水面、空中2722 GPS卫星导航系统可提供全球全天侯高精度__________导航。
A.不实时B.连续近于实时 C.间断不实时 D.间断近于实时2723 GPS卫星导航系统与NNSS卫星导航系统相比较,其优点是__________。
A.连续定位 B.定位精度高 C.定位时间短 D.A+B+C2724 GPS卫星导航系统由__________部分组成。
A.2 B.3 C.4 D.52725 GPS卫星导航系统由__________颗卫星组成。
A.24 B.18 C.30 D.482726 GPS卫星分布在__________个轨道上。
A.3 B. 6 C.18 D.242727 GPS卫星导航系统共设置______颗GPS卫星,分布在____个轨道上。
A.21+3,8 B.18+3,6 C.21+3,6 D.18+3,82728 GPS卫星的轨道高度为__________千米。
A.1946 B.1948 C.1100 D.201832729 GPS卫星运行的周期为__________。
A. 3小时 B.6小时C.12小时 D. 106分钟2730 GPS卫星导航系统的卫星运行周期为__________。
A.3小时 B.约12小时 C.6小时 D.106分钟2731 GPS卫星经过某一地区上空,每天约提前__________分钟。
A.3 B.4 C.3~5 D. 302732 卫星信号的覆盖面积主要取决于__________。
A.发射功率 B.卫星天线高度 C. 轨道高度 D.地面接收站的高度2733 在GPS卫星导航系统中,卫星的轨道高度为__________。
A.1948千米 B.1946千米 C.20200千米 D.19100千米2734 利用CPS卫星定位,在地平线7.5°以上,至少可观测到__________颗卫星。
A.3 B.4 C.5 D.62735 利用GPS卫星定位,在地平线__________,至少可以见到4颗卫星。
A. 以上 B.5° C.7.5° D.15°2736 利用GPS卫星定位,在地平线__________,至少可观测到5颗卫星。
A.以上 B.5° C.7.5° D.15°2737 利用GPS卫星定位,在地平线以上,至少可见到__________。
A.3颗卫星 B.4颗卫星 C.5颗卫星D.11颗卫星2738 GPS卫星导航系统发射信号的频率是__________。
A.1575.42兆赫,1227.60兆赫B.399.968兆赫,149.988兆赫C.10.2千赫,13.6千赫,11.33千赫D.1602兆赫+N×0.5625兆赫,1246兆赫+N×0.4375兆赫2739 GPS卫星导航系统发射__________两种频率的信号A.1602兆赫十0.5625兆赫,399.968兆赫B.1246兆赫+0.43175兆赫,149.988兆赫C.1227.60兆赫,1575.42兆赫D.1948兆赫,1946兆赫2740 单频道GPS卫星导航中,接收的频率是__________。
A.1750兆赫~1850兆赫 B.2200兆赫~2300兆赫C.1227.60兆赫 D.1575.42兆赫2741 双频道GPS卫星导航仪接收的频率是__________。
A.399.968兆赫、149.988兆赫B.1602兆赫+Nx0.5625兆赫、1264兆赫+Nx0.4375兆赫C.9970兆赫、3000兆赫D.1575.42兆赫、1227.60兆赫2742 双频道GPS卫星导航仪所接收的__________频率的信号是用CA码和P码调制的__________频率的信号仅用P码调制了。
A.1227.60兆赫,1575.42兆赫 B.1575.42兆赫,1227.60兆赫C.两个频率均用CA码及P码调制 D. 两个频率均用P码调制2743 双频道GPS卫星导航仪所接收的1575.42兆赫频率的信号是用__________调制的,1227.60兆赫频率的信号用__________调制的。
A.CA码和P码,P码 B. P码,CA码和P码 C.CA码,CA码 D. P码,P码2744 双频道GPS卫星导航仪所接收的________频率的信号是由P码调制的__________频率的信号是由CA码和P码调制的。
A.1227.60兆赫,1575.42兆赫 B. 1575.42兆赫,1227.60兆赫C.两个频率均用CA码和P码调制 D.两个频率均用P码调制2745 双频道GPS卫星导航仪所接收的1227.60兆赫频率的信号是用__________调制的,1575.42兆赫频率的信号是用__________调制的。
A.CA码和P码,P码 B.P码,CA码和P码C.CA码,CA码 D.P码,P码2746 GPS卫星导航系统中,__________载波频率是用CA码和P码调制的__________载波频率是用P码调制的。
A.1227.60兆赫,1575.42兆赫 B.1575.42兆赫,1227.60兆赫C.1570兆赫 D.1850兆赫2747 GPS卫星导航系统中,__________载波频率是用P码调制的,__________载波频率是用CA码和P码调制的。
A.1570兆赫 B.1850兆赫C.1227.60兆赫,1575.42兆赫 D.575.42兆赫,1227.60兆赫2748 GPS卫星导航系统发射的Ll信号的频率由__________码调制。
A.P B.Y和P C.CA D.CA和P2749 GPS卫星导航仪采用__________。
A.码片搜索方式搜索GPS卫星信号 B.频率搜索方式搜索GPS卫星信号C.A+B D.A、B均不对2750 GPS卫星导航系统各颗卫星发射的__________不同。
A.频率B.伪码 C.时间 D.幅度2751 GPS卫星信号波的调制信号是__________。
A.CA码 B.P码C.P码和CA码 D.H码2752 CA码GPS卫星导航仪中所使用的CA码是一种__________。
A.快速、短周期的伪随机二进制序列码B.慢速、短周期的伪随机二进制序列码C.快速、长周期的伪随机二进制序列码D.慢速、长周期的伪随机二进制序列码2753 GPS卫星导航系统中所使用的CA码是__________的伪随机码。
A.快速、短周期B.低速、短周期 C.低速、长周期 D.快速、长周期2754 在GPS卫星导航系统中CA码的码率为__________。
A.1602兆赫 B.1246兆赫C.1.023兆赫 D. 10.23兆赫2755 GPS卫星导航系统中所使用的P码是__________的伪随机码。
A.快速、短周期 B.低速、短周期 C.低速、长周期 D.快速、长周期2756 GPS卫星每帧电文需时__________秒,完整的历书需时__________分钟A.20,2 B.15,4.5 C.30,8.5 D.30,12.52757 从GPS卫星信号中可以提取__________。
A.多普勒频移信息 B.卫星轨道参数 C.对流层折射误差 D.A+B+C 2758 GPS卫星导航仪在定位过程中根据__________识别各颗GPS卫星。
A.伪码 B.频率 C.莫尔斯码呼号 D.时间顺序2759 GPS卫星导航仪采用__________搜索电路。
A.码片 B.频率C.A+B D.A或B2760 通常,商船上使用__________码的GPS卫星导航仪定位与导航,其码率为:A. P,10.23兆赫 B.P,1.023兆赫 C.CA,10.23兆赫 D.CA,1.023兆赫2761 单频道CA码GPS卫星导航仪所接收的载波频率是__________。
A.1227.60兆赫 B.1750~1850兆赫 C.2200~2300兆赫 D.1575.42兆赫2762 单通道GPS卫星导航仪系指__________。
A.选择GPS卫星L1频率的信号 B.选择GPS卫星CA码信号 C.GPS卫星导航仪用一个接收通道 D.选择GPS卫星P码信号2763 商船上用的最多的GPS卫星导航仪是__________GPS卫星导航仪。
A.单通道、单频、CA码、时序型 B.双通道、单频、CA码、时序型C.单通道、单频、CA码、多路复用型 D.多通道、双频、CA码和P码、连续型2764 GPS卫星导航仪的载波环使本机跟踪载波在频率和相位上和接收的载波对准,自动捕获和跟踪卫星__________。
A.码 B.信号 C.电文D.载波2765 卫星测距定位意指确定船位的方法是测量___________。
A.用户到卫星的距离 B.用户到卫星的距离差C.用户到卫星的距离和 D.A+B+C2766 GPS卫星导航仪测得的距离不是用户到卫星的真正距离,其中包括__________。
A.卫星时钟偏差 B.信号传播误差(电离层折射误差,对流层折射误差)C.用户时钟偏差 D.A+B+C2767 海洋船利用GPS卫星导航仪进行二维定位时,至少选择__________颗GPS卫星。