仿真 搅拌
连续搅拌反应釜系统的设计与仿真
由于化学反应类型不同,物料的相态不同,反应条件差别很大,按照反应器的进出物料的状况,可将反应器分为间歇式、半间歇式、和连续式,连续反应器是工业生产过程中最常用、最普遍采用的以上方式,连续反应器为了保证反应的正常进行,需要对反应器中的某些关键工艺参加如温度、压力、浓度灯进行控制使系统稳定,通常的控制使采用定值控制,从反应器的传热来分,又可分为绝热式和非绝热式反应器,按操作方式分,又可分为连续操作,间歇操作和半间歇操作。从结构上分有釜式、管式、固定床和流化床等;釜式反应器又是工业上广泛采用的一种形式,可采用进行匀相反应,也可进行多相反应,如液固、气液、液液及气固液灯反应,釜式反应器内部有搅拌装置,可以使反应器中反应区的反应物料的浓度均一。
反应釜系统,杨爱新对该对象进行动态机理建模,建立的模型符合现场实际的情况,同时利用该模型来研究当操作条件改变时,聚合物体积浓度百分比、反应物浓度、反应速率、冷却水出口温度以及反应体系温度的变化。
2.连续搅拌反应釜系统的控制方面
雷佳等充分利用遗传算法的寻优特性,提出了一种与PID控制相结合的遗传寻优算法,明显地提高了控制效果;以工业现场实际情况为背景,通过改进跟踪微分器,设计了一种二阶白抗扰控制方法,明显提高了工业现场连续搅拌反应釜的控制效果;朱学峰根据连续搅拌反应釜系统的非线性特性,提出了基于混合模型的非线性预测控制策略,此混合模型由非线性和线性两个部分组成,通过其仿真也可看出实际输出与模型输出误差较小;吴伟林提出了一种基于神经元网络的自适应控制方法,该方法有效改善了反应釜温度的大时滞问题,能够对反应釜温度进行有效地控制;刘士荣应用了一种模糊逆模一PID与神经网络相结合的复合控制策略,对反应釜温度控制获得了良好的控制效果;韩光信等提出了应用于连续搅拌反应釜的非线性鲁棒控制,对开车过程进行了优化;针对连续搅拌反应釜系统,贾爱民提出了一种鲁棒控制算法,该算法具有较强的适应性能和较强的抗干扰能力,能够满足实时控制的要求。
基于PLC的物料搅拌系统设计
摘要本文介绍的物料搅拌系统以PLC作为控制核心,结合变频器等完成物料搅拌的自动控制系统,能够较好的满足搅拌系统的要求。
本设计运用了变频电机M1,恒速电机M2,液位传感器,搅拌电机M3,皮带秤等主要器件,以PLC为控制核心,选用了西门子公司的S7-200系列机PLC,西门子生产的变频器MM440,ZDSN型电子式电动双调节阀,SS.45-HSP-100型静压式液位变送器,ICS-ST4型电子皮带称,还有断路器,熔断器,热继电器等多种电路保护元件,运用PLC编程语言,以及人机界面控制面板,用PLC的S7_200的仿真软件进行仿真,实现了对不同的物料按预先设定的程序进行混合搅拌的功能。
关键词:可编程控制器PLC;变频器;电动调节阀;物料搅拌系统;PID控制;电动调节阀ABSTRACTW ith the development of modern industrial technology, material mixing technology has been rapid development, it is widely used and the chemical technology and production, but in the application, the traditional material mixing process also exists serious problems and capacity constraints。
Computer technology as the core of PLC in the general automatic control equipment, it is a kind of program to change control function of the computer. As microprocessors, computer and communication technology, the rapid development of PLC programmable controller has widely applied in industrial control, and the proportion of the rapid rise in. PLC mainly consists of CPU module, input and output module and programming module device. It is applied in industry, mixing equipment mixing process realized automation control, and improved the stability, agitate equipment work for the mixing machine smoothly, orderly, accurate working creates powerful guarantee. In this paper, the material mixing system with PLC as control core, combined with frequency converter, etc material stirring of the automatic control system.Key words: PLC programmable controller;frequency converter;material mixing system;PID control; Electric control valve目录绪论.............................................................................................. 错误!未定义书签。
三维多相搅拌机械Fluent仿真实例
三维多相搅拌机械Fluent仿真实例做了好几个月的搅拌机械,过程中走了一些弯路,知道初学者的艰辛,今天抽时间把简单的实例简单总结一下,提供给有用的人.1建模a.烘烤桨的分解成-f$z3?*a4v+q$q9w)l2{b.烘烤釜的分解成!r*b$p5v1y,u:w9b8bc.网格分割1f#[*l%c\1)这里对静止区域和2个转动区域进行网格划分p\2)网格质量的检查;e7g2{$c+bg,{d.边界条件的设置1)设置实体区域,这里要设置3个实体区域:静止区域(zonesta),转动区域上1(zone1),转动区域下2(zone2);2)设置边界条件:这里必须设置之前编号号的12个面为interfac,烘烤轴其他的区域(axis)为wall,民主自由液面(waterface)为symmetry,通气管入口(gasinlet)为速度进口(在gamit中没velocityinlet类型。
在fluent可以改为),他们的设置同前面;2a#t+`3ts)r3)页面标题栏的solver-----fluent5/6即挑选运算器为fluent;)w&t%e*a:[.re.留存与输入5j$uk5e/b/j1)点击标题栏的file-----export―mesh,输入文件名名确定即可,mesh文件的保存路径极为开始时指定的工作目录;2)页面标题栏的file-----save,然后页面标题栏的file-----exit即选择退出gambit2.fluent操作a.网格操作方式'i#_0t4d%a0u#jf,|1)启动fluent后选择3位求解器即可,依次点击file----read---case,找到刚才gmbit工作目录下的mesh文件;网格读入完成;可以选择display―grid,选择相应得区域,按display即可;k,r-x$w5m#c6m4`3^2)依次页面grid―check,检查最轻网格体积与否大于0;3)依次点击grid---scale,fluent默认的长度单位为m,改为gambit默认的单位mm,依次点changelengthunits,scale,close;4)依次页面frid---swmooth/swapgrid,分别页面smooth,swap循环,直到swap信息中发生numberfacesswaps:0年才,此时停用对话框即可;这步操作方式就是对网格光顺以及对等角倾斜度(skewness)低的地方互换网格以便于后面的运算;+x!|0n.r4],ub.模型设置1)点击define―model---solver,因为后面所用的mrf为稳态处理法,因此选取默认的3维稳态求解器即可;\2)页面define―model---multiphas,挑选mixture多相流模型,相数为2,其余预设即可3)页面define―model---viciousmodel挑选标准k-e模型即可9v,d1f)~(t4)点击define―materials,选择液态水(h2o),fluent默认的工作介质为空气;5k'a7j$e1p:|.k.e5)点define―phase,确认phase1居多二者,设置空气(air)为第二二者,设置气泡直径为0.003mm;点mass选项卡,设置传输数目为1,从phase2tophase1,mechanism降为7.5e-5;这里的数据,别的维持预设,确认即可;!q$g$c8v%sf/t5?6)点define---operatinconditions设置大气压强及重力;7)点define---gridinterface,挑选旋转颤抖区域与恒定区域平行面(即为在gambit里定义的interface边界),设置6组与即可;这个设置就是为了并使两个区域的数据能够展开数据交换;1r7j5m3o!o,d$q)cc.边界条件设置点define―boundarytypes1)对zonesta,phase挑选mixture,点set,默认设置,点ok即可;2)对zone2(下面转动区域),phase选mixture,点set,在运动选项卡,运动类型选mrf,设置转速为4rad/s,其余默认;这里即设置了转动区域与静止区域的处理运用mrf的方法;同理对zone1做同样的设置3)对wall:(上层烘烤桨),phase挑选mixture,点set,点运动选项卡,设立为运动的墙,运动类型为旋转,设置它与zone1相对恒定(相对速度为0),别的预设;对wall (下层烘烤桨)也运用相同的处置方法;3@5_0a-q'p4)点axis,phase选mixture,点set,设为运动的墙,绝对转动速度为4rad/s,由于axis的相对区域为zonesta是静止的,因此用绝对速度设置较好;(h/i4q$]&x:z&\\3l7t;f5)点gaslet,phase挑选mixture,将gaslet的边界条件类型改成velocityinlet,的定即可;phase挑选phase1,set,d.运算&[$_;e7r5z5k&c4)点solve―iretate,发生的对话框,设置运算次数,展开运算即可。
搅拌机的系统仿真

搅拌机机构模拟本章建立搅拌机机构模型,模拟连杆断电搅拌的空间曲线,并以Excel表格形式输出轨迹点的三维坐标。
通过改变机构尺寸,可以使得连杆断电的估计按照预定的轨迹运动。
工作原理搅拌机机构如图示,由曲柄、连杆、摇杆、机架组成四杆机构,加上容器构成。
曲柄绕机架转动,容器绕自身轴线转动,要求连杆端点的轨迹按照预定的轨迹运动。
由于连杆端点相对四杆机构在铅垂片面运动,容器在水平面内旋转,因此连杆端点相对容器的运动轨迹是一条空间曲线,可以达到搅拌容器中物料的目的。
零件造型1、四杆机构曲柄草图如图示,退出草图后,拉伸,厚度为5mm,以文件名“曲柄”保存该零件。
选择【文件】/【另存为】命令,把文件“曲柄”另外以“摇杆”保存,将其长度加长。
如图示,得到摇杆。
同样,得到机架,如图示。
连杆草图如图示,选择【工具】/【草图绘制工具】/【等距实体】命令,完成草图,如图示,退出草图,拉伸,厚度为5mm,得到零件连杆。
2、容器草图如图示,退出草图,旋转360,得到容器如图示。
装配选择【文件】/【新建】/【装配体】命令,简历一个新装配体文件,以文件名“搅拌机机构装配体”保存该文件。
把前面完成的零件机架、曲柄添加进来,采用同轴心配合,如图示,然后重合配合,如图示。
把连杆添加进来,与曲柄进行同轴心配合和重合配合,如图示。
把摇杆添加进来,分别与连杆和机架同轴心配合,与机架重合配合,如图示把容器添加进来,与机架底端进行距离配合,距离设置为15mm,如图示,装配完成后如图示,所有配合关系如图示。
仿真在设计树上选择分析图标,将容器设置为【静止零部件】,其余设置为【运动零部件】。
设置运动如果按照曲柄绕机架转动,容器绕自身轴线转动,连杆端点的轨迹将是相对机架的轨迹,为一平面曲线。
为了模拟出连杆端点的空间曲线,将容器绕自身轴线的转动改为四杆机构绕容器轴线转动,容器静止不动,由于连杆和容器相对运动关系不便,因此模拟出来的曲线可以反映连杆端点相对容器的空间轨迹曲线。
模拟仿真液体混合搅拌控制

任务导入 任务计划
任务实施 任务实施
归档应用
练习提高
图9-7 加热器添加
项目9 嵌入式组态TPC 的液体混合搅拌控制工程
任务9.1 嵌入式组态TPC模拟仿真液体混合搅拌控制工程 任务目标
(11)添加按钮。单击画图工具箱的“标准按钮”,在画面中画出一 定大小的按钮,调整其大小和位置。鼠标双击该按钮,弹出“标准按 钮构件属性设置”窗口。在“基本属性”页进行设置。“按钮标题” 栏:启动;“标题颜色”栏:黑色;“标题字体”:宋体、粗体、小 四;“水平对齐”:中对齐;“垂直对齐”:中对齐;“按钮类型”: 标准3D按钮。 对画好的按钮进行复制、粘贴,调整新按钮的位置。双击新按钮,在 “基本属性”页将“按钮标题”的内容改为“停止”。调整位置和大 小。单击工具栏“存盘”按钮。 (12)添加“液体混合搅拌时间”标签。单击“工具箱”内的“标签” 按钮 ,绘制一个大小合适的标签,并用文字标注上“液体混合搅拌 时间”。 (13)添加“物料罐液位显示”输入框。单击“工具箱”内的“输入 框”按钮 ,绘制一个大小合适的输入框,并用文字标注上“物料 罐液位显示”。如图9-8所示。
任务9.1 嵌入式组态TPC模拟仿真液体混合搅拌控制工程 任务目标
4.动画连接 (1)液面升降效果。在用户窗口中,双击物料罐,弹出属性设置窗口, 单击“数据对象”标签。单击“?”按钮,选中“物料罐液位”数据 对象,双击鼠标确认,数据对象连接为“物料罐液位”,如图9-9所示。
任务导入 任务计划
任务实施 任务实施
任务导入 任务计划
任务实施 任务实施
归档应用
练习提高
项目9 嵌入式组态TPC 的液体混合搅拌控制工程
任务9.1 嵌入式组态TPC模拟仿真液体混合搅拌控制工程 任务目标
基于EDEM的混凝土搅拌机搅拌过程的料流分析

基于EDEM的混凝土搅拌机搅拌过程的料流分析张军【摘要】为了直观地反映混凝土搅拌机搅拌过程中的物料流动状态和搅拌低效区的分布状况,以常见的双卧轴搅拌机为例,借助离散元分析软件EDEM对整个搅拌过程进行模拟仿真.对搅拌过程中物料的运动状态进行实时观察,同时随机选取某一颗粒对其在搅拌过程中不同时刻的运动轨迹进行跟踪.结果表明,在搅拌装置结构的影响下,搅拌过程中物料发生了沿轴向和径向的循环流动;物料在靠近搅拌轴的低效区运动缓慢,出现搅拌不均、抱轴等现象.【期刊名称】《筑路机械与施工机械化》【年(卷),期】2018(035)008【总页数】5页(P102-106)【关键词】混凝土;双卧轴搅拌机;搅拌装置;EDEM【作者】张军【作者单位】山西省高速公路开发有限公司,山西太原030006【正文语种】中文【中图分类】U415.520 引言混凝土搅拌机作为建筑、道路工程的重要施工设备,其性能的好坏对工程质量有着直接的影响。
双卧轴搅拌机作为目前国内混凝土搅拌设备的主导机型,已经得到了广泛的应用;但由于其本身存在搅拌低效区的固有缺陷,造成搅拌质量不高、工作效率较低的问题[1-3]。
以长安大学冯忠绪教授为代表的科研团队对搅拌机做了大量的研究,针对搅拌低效区的问题提出了振动搅拌技术,通过大量振动搅拌试验,得出振动搅拌是强化混凝土生产过程、改善搅拌低效区、提高搅拌质量和效率最经济的方法[4-6]。
但是,目前对双卧轴搅拌机搅拌过程中物料运动变化的研究并不多,本文借助仿真软件EDEM对双卧轴搅拌机的搅拌过程进行分析,有效展示双卧轴搅拌机搅拌过程中的物料流动以及低效区状况,为相关的研究工作提供参考。
1 搅拌低效区理论如今,市场上常见的搅拌机大致分为卧轴式和立轴式2种,其搅拌原理基本相同。
如图1所示,在搅拌区域内,同一个搅拌装置上搅拌线速度沿径向方向呈递增趋势[7-8]。
这就说明:越靠近搅拌中心区,搅拌线速度越低,从而导致靠近中心区域的混合料受到的搅拌作用相对较弱,剪切和推动作用小,使得混合料流动缓慢,产生抱轴现象;同时,搅拌均匀性差,给成品混凝土造成了很大的质量隐患,这就是搅拌低效区现象[9-11]。
基于EDEM_的搅拌机混合均匀度仿真分析

基于EDEM的搅拌机混合均匀度仿真分析*王晓伟 陈庆照 王海洋山东建筑大学 济南 250101摘要:文中针对烧结砖用双轴搅拌机搅拌叶片不同安装角对搅拌混合均匀度的影响进行了仿真研究。
首先分析了物料颗粒性质及其搅拌中的碰撞运动,选择了合适的颗粒接触模型和颗粒模型,其次建立了3种搅拌叶片安装角的搅拌机模型,并利用EDEM仿真软件对搅拌混合过程进行了模拟仿真,对比分析了搅拌叶片不同安装角下的物料离散系数,得到搅拌叶片的最佳安装角度,此时物料离散系数最小,混合均匀度最好。
关键词:双轴搅拌机;EDEM;离散系数;均匀度中图分类号:TP391.9 文献标识码:A 文章编号:1001-0785(2023)16-0024-06Abstract: In this paper, the influence of different installation angles of mixing blades on mixing uniformity of double-shaft mixer for sintered brick was simulated. Firstly, the properties of material particles and the collision motion in stirring were analyzed, and the appropriate particle contact model and particle model were selected. Secondly, three mixer models with different installation angles of stirring blades were established, and the stirring process was simulated by EDEM simulation software, so as to compare and analyze the material dispersion coefficient under different installation angles of stirring blades and get the best installation angle of stirring blades with the smallest dispersion coefficient and the best mixing uniformity. Keywords:double-shaft mixer;EDEM;discrete coefficient;uniformity0 引言烧结砖由不同原料搅拌混合后烧制而成,原料混合均匀程度会严重影响烧结砖的烧成质量[1]。
连续搅拌反应釜系统的设计与仿真

吉林化工学院毕业设计说明书连续搅拌反应釜系统的控制器设计与仿真Controller Design and Simulation for CSTR学生学号:11510210学生姓名:严新宇专业班级:自动1102指导教师:王野职称:工程师起止日期:2015.03.09~2015.06.26吉林化工学院Jilin Institute of Chemical Technology摘要连续搅拌反应釜(CSTR)是发酵、化工、石油生产、生物制药等工业生产过程中应用最广泛的一种化学反应器,其控制质量直接影响到生产的效益和质量指标。
对连续搅拌反应釜通过控制内部的工艺参数,如温度、压力、浓度等稳定,保证反应的正常运行。
本文针对连续搅拌反应釜的数学模型,应用泰勒展开得到了线性状态空间表达式,在此基础上设计了LQR控制器,仿真结果表明,控制效果令人满意。
本设计将CSTR的非线性动态模型进行了输入输出线性化,得到CSTR线性状态空间模型。
设计出连续搅拌反应釜的极点配置控制器并对系统进行仿真。
设计出连续搅拌反应釜的LQR控制器并对其系统进行仿真。
并对两种控制方法的控制效果进行了比较。
关键词:连续反应搅拌釜;LQR控制器;MATLAB仿真AbstractContinuous stirred tank reactor (CSTR) is the most widely used in fermentation, chemical engineering, petroleum production, bio pharmaceutical and other industrial production process as a chemical reactor, control the quality directly affect the production efficiency and quality index. For continuous stirred tank reactor by controlling the process parameters, such as temperature, pressure, concentration and so on, ensure the normal operation of the reaction. In this paper, based on a continuous stirred reactor mathematical model, the application of Taylor expansion is obtained for the linear state space representation, on this basis, design the LQR controller. Simulation results show that the control effect is satisfactory.In this paper, the nonlinear dynamic model of CSTR is linearized, and the CSTR linear state space model is obtained. The pole assignment controller for continuous stirred tank reactor was designed and the simulation of the system was carried out. The LQR controller of the continuous stirred tank reactor is designed and the system is simulated. The control effect of the two control methods is compared.Key Words: Continuous Stirred Tank; LQR Controller; MATLAB Simulation目录摘要 (I)Abstract ......................................................................................................................................................... I I 第1章绪论 (2)1.1 课题背景及目的意义 (2)1.2 国内研究现状 (2)1.3 国外研究现状 (3)1.4 连续反应搅拌釜的控制技术 (4)1.5 仿真技术 (4)1.5.1 数字仿真概述 (4)1.5.2 MATLAB仿真软件 (8)1.6本设计的主要研究内容 (10)第2章连续搅拌反应釜的数学模型 (12)2.1 连续搅拌反应釜结构 (12)2.2 连续搅拌反应釜仿真模型的建立 (14)2.3 非线性模型的线性化 (17)第3章极点配置控制器的设计与仿真 (19)3.1 极点配置 (19)3.2 极点配置控制器的设计 (19)3.2.1 极点配置控制算法 (19)3.2.2 CSTR极点配置控制器设计 (20)第4章LQR控制器的设计与仿真 (25)4.1 LQR控制器的介绍 (25)4.2 LQR控制器的原理 (25)4.3 LQR控制器的设计 (26)4.4 两种控制器效果对比 (29)结论 (31)参考文献 (32)附录Ⅰ线性化程序 (33)致谢 (35)第1章绪论1.1 课题背景及目的意义连续搅拌反应釜是化工生产中的常用设备,同时又是典型的非线性被控对象。
冶金工业中的虚拟仿真技术教程分享
冶金工业中的虚拟仿真技术教程分享虚拟仿真技术在冶金工业中的应用与教程分享在现代工业中,虚拟仿真技术的应用日益广泛,对于冶金工业而言也不例外。
虚拟仿真技术能够通过模拟实际情景,帮助冶金专业人员进行设备的设计、工艺的优化以及系统的运行,提高生产效率,降低风险。
本文将向大家分享冶金工业中常用的虚拟仿真技术以及相关的教程。
一、虚拟仿真技术在冶金工业中的作用1. 设备设计:虚拟仿真技术可以帮助冶金工程师在设备设计阶段模拟各种场景,并进行性能测试。
通过优化设计,减少试错成本,提高设备的可靠性和性能。
2. 操作培训:冶金工业存在许多危险和复杂的操作过程,虚拟仿真技术可以在安全的环境中为操作人员提供实践机会。
通过模拟真实情景,运用虚拟工具进行操作培训,降低意外风险,提高工作效率。
3. 工艺优化:冶金工业中的工艺复杂多变,通过虚拟仿真技术,可以对不同工艺进行模拟和优化。
通过对不同参数和条件进行测试,优化工艺流程,提高产品质量和产能。
4. 系统运行:在大型冶金生产过程中,出现故障和停工都会造成巨大的经济损失。
虚拟仿真技术可以对整个生产系统进行模拟和监控,提前发现问题并进行应对,确保生产运行的稳定性和可靠性。
二、虚拟仿真技术在冶金工业中的应用1. 计算流体力学仿真(CFD):CFD技术运用数值模型和求解器对流体力学问题进行仿真。
在冶金工业中,CFD技术可以用于模拟流体的运动和传热过程,优化设备布局、改善冷却效果等。
2. 各向异性材料模拟:虚拟仿真技术可以模拟各向异性材料在加工和使用过程中的行为。
例如,金属在冶金过程中可能会发生晶粒生长、晶界迁移和应力集中等现象,通过仿真和建模,可以预测材料的性能和变形规律。
3. 熔体流动仿真:冶金工业中的熔体流动对于冶金产业的成功非常重要。
虚拟仿真技术可以模拟熔体的流动行为,优化喷吹装置、搅拌器和传热设备的设计,提高冶金过程的效率和稳定性。
4. 机械强度分析:冶金设备需要在高温和高压等严苛条件下工作,机械强度分析能够帮助工程师判断设备在不同工况下的可靠性和安全性。
基于EDEM的颗粒物搅拌仿真

基于EDEM的颗粒物搅拌仿真【问题描述】在⼀个塑料料仓内装满了塑料颗粒。
⼀根塑料搅拌棍在⾥⾯匀速穿过,试⽤线性弹簧接触模型对其搅拌过程进⾏仿真。
【问题分析】1. 使⽤线性弹簧接触模型2. 料仓,搅拌棍及地⾯均在EDEM中直接建模。
3. ⽤静态⽅式在料仓内填满颗粒。
4. 对搅拌棍设置匀速直线运动。
【仿真过程】⼀.建模1.设置全局参数(1)设置标题(2)设置接触模型颗粒和颗粒之间使⽤线性弹簧接触模型设置其参数如下对于颗粒与⼏何体之间设置同样的接触和参数(3)设置重⼒(4)设置材料只有⼀种材料:塑料(5)设置材料之间的交互参数2.创建颗粒模型设置最简单的球形颗粒,半径是25mm。
材料是塑料,计算其⼏何与惯性参数。
3.创建料仓,搅拌棍和地⾯(1)创建料仓(BOX类型),设置其材料是塑料,物理类型。
进⼀步设置其尺⼨注意其顶⾯是开⼝的。
结果如下(2)创建地⾯(polygon类型),设置其材料是塑料,物理类型。
进⼀步设置其尺⼨结果如下图(3)创建搅拌棍(box类型),设置其材料是塑料,物理类型。
进⼀步设置其尺⼨创建结果如下图还要设置其运动参数即:该搅拌棍会做平移,运动时间是从0秒到1.2秒;初速度是1⽶每秒。
最后的参数确定了是沿着X⽅向运动。
创建完毕其运动⽅向显⽰如下图(4)创建颗粒产⽣⾯,它是⼀个虚拟的体。
设置其⼏何尺⼨4.创建颗粒⼯⼚创建⼀个新的颗粒⼯⼚,是静态类型,颗粒充满整个体。
确定其填充的是上⼀步⽣成的GenerateBox.⼆.仿真设置固定时间步长为瑞内时间步长的22%,仿真时间是2秒,⽽数据的保存间隔是0.01秒。
⽹格尺⼨是最⼩半径的2倍。
然后启动仿真。
三.后处理隐藏GenerateBox,⽤颜⾊设置颗粒的速度。
下图是初始状况。
搅拌棍还在料仓外,颗粒尚未⽣成。
颗粒已经产⽣。
搅拌棍刚刚进⼊,红⾊颗粒意味着速度最⼤的颗粒,被搅拌起来。
搅拌棍往前⾏⾛,更多的颗粒受到了⼲扰。
⾏进到后期,已经有不少颗粒物跳离了料仓。
搅拌仿真分析报告模板

搅拌仿真分析报告模板搅拌仿真分析报告模板一、背景介绍:在搅拌过程中,搅拌器的设计和性能对搅拌效果有着重要影响。
为了评估搅拌器的搅拌效果,需要进行搅拌仿真分析。
二、仿真模型:1. 搅拌器的三维模型:提供精确的搅拌器模型,包括搅拌器形状、尺寸和材料等参数。
2. 搅拌液体的物理特性:提供搅拌液体的物理特性参数,如密度、黏度等,用于分析搅拌过程中的流体动力学。
3. 搅拌器运动参数:提供搅拌器的转速和转向等运动参数,用于模拟搅拌器在搅拌液体中的运动。
三、仿真分析:1. 流场分析:通过计算流体动力学模拟搅拌液体中的速度场和压力场分布,分析搅拌器的搅拌效果和搅拌液体的混合程度。
2. 涡旋分析:通过计算涡量和剪切应力等参数,评估搅拌器的涡旋生成和传输能力。
3. 能耗分析:通过计算搅拌过程中所消耗的功率,评估搅拌器的能效性能。
四、仿真结果与分析:1. 流场分析结果:根据流体动力学模拟结果,分析搅拌液体中的速度场和压力场分布,评估搅拌器的搅拌效果和搅拌液体的混合程度。
2. 涡旋分析结果:根据涡量和剪切应力等参数,评估搅拌器的涡旋生成和传输能力,对比不同搅拌器的涡旋效果,找到最佳设计方案。
3. 能耗分析结果:根据功率计算结果,评估搅拌过程中的能耗水平,提出改进措施以提高能效性能。
五、结论与建议:1. 根据流场分析结果,评估搅拌器的搅拌效果和搅拌液体的混合程度,并提出相应的改进措施,以优化搅拌效果。
2. 根据涡旋分析结果,评估搅拌器的涡旋生成和传输能力,并比较不同搅拌器的涡旋效果,选择最佳设计方案。
3. 根据能耗分析结果,评估搅拌过程中的能耗水平,并提出改进措施以提高能效性能。
六、参考文献:参考文献列表。
以上是一个搅拌仿真分析报告的模板,可根据实际情况进行适当调整和修改。
反冲射流混合搅拌装置研究
3
搅拌装置相关参数的理论分析
射流搅拌就 是利用从 射流口出 来的高速 流体带
动容器中的液体进行搅拌 , 从而达到容器中物料混合 的目的[9]�这 方面 的研 究可 分为 两类 : 一 是实 验研 究, 其主要目的 是研究操作 条件和几 何尺寸的 影响 ; 二是建模或基于计算流体力学 ( C F D ) 的仿真研究[10]� 本文属于第 1 类研究 �参考工程流体力学教材 , 射流 [10] : 反冲所产生的反冲力计算过程如下 设流体在截面 1 -1 处的直径 � 速度 � 压力和流量
二是建模或基于计算流体力学fd的仿真研究10本文属于第1类研究参考工程流体力学教材射流反冲所产生的反冲力计算过程如下10设流体在截面11处的直径速度压力和流量分别为射流口截面22处直径速度压力和流量分别为截面积为a管的角度为90根据伯努利方程由于距离很短忽略沿程损失取沿程阻力系数料液的密度kgm断面11与22上的平均速度为取动量修正系数011对入口方向设为方向和出口方向设为方向列动量方程得整理可得2012年10大小相等方向相反若回转半径为r则由于两侧射流产生的驱动力矩为阻力矩包括产生反冲力部分在液面下部分相对运动的阻力矩旋转摩擦阻力矩罐体底端搅拌浆旋转阻力矩等部分产生反冲力部分在液面下部分相对运动的阻力矩为料液的密度kgm在进料初期反冲出口位于液面以上相对运动面积为0t经过计算为00012m025m相对运动速度v600256013罐体底端搅拌桨旋转阻力矩为搅拌功率可以用搅拌公式计算1113也可以参考经验公式按搅拌容积的0203倍计算14在此取上限03v13和式14代入到式15中整理可以得到泵的流量之间的关系调整流量搅拌机构的结构尺寸就可以得到不同的搅拌转速得到不同的搅拌强度在给定泵的流量和扬程条件下n型搅拌管的直径推进搅拌桨直径与转速之间关系即可以确定理论计算和实践有一定的差距真正应用还应该通过试验得出系列参数搅拌功率的计算影响搅拌功率的因素很多具体包括
搅拌过滤过程的CFD仿真
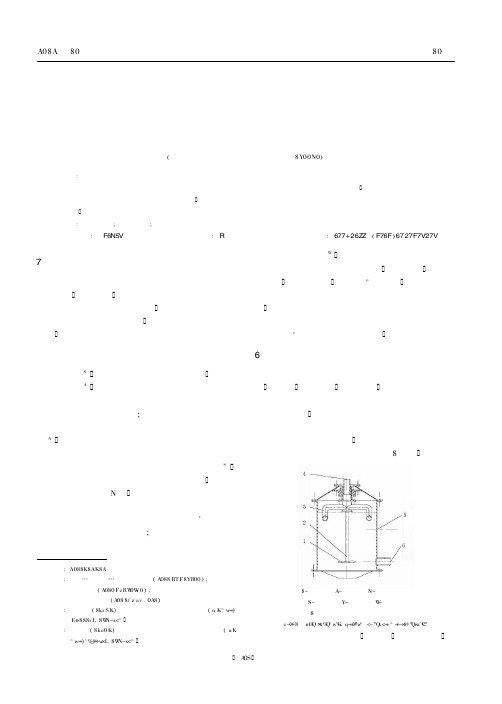
搅拌过滤过程的CFD仿真陈家权;赵威;劳黎明;黄海鑫;杨凯波【摘要】螺旋搅拌过滤器的搅拌轴转速直接影响过滤过程的过滤效果.文中采用计算流体力学的方法对过滤器的工作过程进行仿真.分析了过滤过程中,搅拌腔内流体的流速、流态、压力和固含量随搅拌轴转速的影响,讨论了流场内截面的切向流速大小随工作转速的变化规律、各截面涡流的形成和对过滤效率的提高作用,以及工作转速对分离效率的影响.结果表明,随工作转速从200 r/min增加到800 r/min过滤腔内切向流速上升近4倍,边界压力上升15%,分离效率提升5.3%;域内各截面涡流数目增加、涡流直径变大,对混合液的过滤效果增强.文中还给出了螺旋搅拌过滤设备的过滤方程,方程的计算值与仿真值的误差在15%左右,可以为后续设备的结构优化和改进提供必要的依据.【期刊名称】《机械工程师》【年(卷),期】2016(000)010【总页数】6页(P19-24)【关键词】搅拌;过滤;ANSYS;CFD【作者】陈家权;赵威;劳黎明;黄海鑫;杨凯波【作者单位】广西大学机械工程学院,南宁530004;广西大学机械工程学院,南宁530004;广西大学机械工程学院,南宁530004;广西叶茂机电有限公司,南宁530004;广西大学机械工程学院,南宁530004【正文语种】中文【中图分类】TP391.7离心搅拌过滤设备是一种新型过滤设备,当它工作时,搅拌轴带动搅拌腔内的混合液高速旋转,利用离心力将混合液甩在周围的滤网上,利用旋转产生的巨大压力将清液压出滤网,滤渣则留在滤网内。
同时由于搅拌腔内的液体始终处于高速流动的状态,原本附着在滤网上的滤渣被快速地剥离下来,在实现过滤的同时保证滤网表面的清洁[1]。
如图1所示,本文设计的螺旋搅拌过滤器,其螺旋搅拌轴主轴呈阶梯轴分布,底端长光轴部分焊接有4块搅拌板,搅拌板又和螺旋叶片焊接。
装配时,螺旋搅拌轴伸入到圆柱形的过滤腔内部,过滤腔圆周上安装有滤网。
一种盘式搅拌机的设计及仿真分析

一种盘式搅拌机的设计及仿真分析朱霖龙;刘雅文【摘要】为提高混凝土搅拌机的工作效率,针对传统立轴搅拌机进行结构改进,参考经验公式,类比较为成熟的双卧轴搅拌机,设计了一种新的盘式搅拌机.利用EDEM颗粒有限元分析软件,对比了盘式搅拌机和传统立式搅拌机的搅拌强度.结果表明,按照新方法设计的搅拌机具有更高的工作效率,更小的能耗,更强的工作可靠性.【期刊名称】《机械制造与自动化》【年(卷),期】2019(000)004【总页数】4页(P121-124)【关键词】盘式搅拌机;结构改进;EDEM;仿真分析;搅拌装置【作者】朱霖龙;刘雅文【作者单位】西安工业大学机电工程学院,陕西西安710021;西安工业大学机电工程学院,陕西西安710021【正文语种】中文【中图分类】TH122;TP391.90 引言混凝土作为一种可塑性人造石材料,应用于所有的基础设施建设,是现代社会建筑最具有代表性的材料。
一台真正先进的混凝土搅拌设备,必须能够在高速、高质量、节能的情况下完成搅拌作业。
在文献[1-2]中,针对自落式搅拌机进行了结构优化,提高了工作可靠性,解决了大型化问题。
但是其工作装置没有改进,搅拌时间较长,影响生产率;文献[3]中设计的双卧轴搅拌机,具有搅拌质量高,搅拌时间短的优势,但是抱轴、轴端密封和能耗大的瓶颈一直未能解决;文献[4]设计的无轴式搅拌机是双卧轴搅拌机的一种改良,解决了抱轴问题,但是仍未解决轴端密封和能耗大的问题;文献[5]与文献[6]设计了两种行星式搅拌机,其运动轨迹分别为长幅外旋轮线和长幅内旋轮线,搅拌强度高,不存在抱轴问题,但是结构复杂,减速箱质量大,容易造成搅拌装置变形、连接错位;文献[7]设计了一种基于双卧轴搅拌机的改良振动机型。
振动搅拌效率高,质量好,不产生抱轴问题,但是结构复杂,制造成本高,易产生共振、谐振等不良影响。
近些年,国外的混凝土搅拌机市场出现一种新型的搅拌机,称之为“盘式搅拌机”,结构如图1所示。
磁流变液混合数值模拟

磁流变液混合数值模拟摘要:由于磁流变液中颗粒与载液存在密度差,重力会使颗粒沉降导致磁流变液失效。
本文采用数值模拟方法,在模型底部设计桨叶对沉降的磁流变液进行搅拌混合,讨论了不同倾斜角度的桨叶对磁流变液混合的影响,结果表明倾斜角度大的桨叶混合效果好。
关键词:磁流变液;桨叶搅拌;倾斜角度1引言磁流变液是把铁磁颗粒加入到载液中,并添加活性剂,整体颗粒呈悬浮状态的液体。
在加入或关闭磁场的过程中,磁流变液可以在极短的时间内完成液态—固态—液态的转变。
磁流变液具有实时可控、耗能小、转化可逆等优点[1]。
磁流变液可应用于振动控制、降噪等领域[2]。
由于磁流变液中载液与固体颗粒存在密度差异,在重力的作用下,悬浮的磁性颗粒会趋于沉降,甚至是相互聚集、结块,导致磁流变液的功能降低,限制磁流变液的应用价值。
因此,防止磁流变液沉降具有实际的工程意义。
为了抑制磁流变液沉降,研究人员做出了大量努力:改变颗粒的形状、改变载液的黏度、加入特定的添加剂等。
徐淼[3]制备了不规则多面体形貌的Fe3O4颗粒,其多棱多角的形貌特征增强了磁流变液的沉降稳定性。
丁丁[4]分别采用矿物油、聚α-烯烃、乙基硅油、甲基硅油作为载液制备出4种磁流变液,实验结果表明硅油种类将直接影响磁流变液的零场粘度、磁性、流变性、沉降稳定等性能;陈维清[5]分别在磁流变液中添加了油酸、聚乙二醇以及油酸与聚乙二醇的混合物,通过静置观测提出复合使用表面活性剂能够很大程度上提高磁流变液的稳定性。
本文在圆柱形模型底部安装桨叶,利用桨叶对沉降的磁流变液进行搅拌仿真模拟,分析桨叶搅拌对颗粒浓度的影响。
2数值模拟方法仿真磁流变液被搅拌的关键是建立其对应的数学模型。
磁流变液的混合为固-液两相混合,固-液两相的求解模型方法一般为欧拉-拉格朗日方法和欧拉-欧拉方法。
在前者方法中,把基载液体假设为连续相,把固体颗粒假设分散相,分散相与连续相有着动量、质量以及能量的互相传递。
在后者方法中,把连续相与分散相看做是一种相互渗透的连续体,定义为相体积分数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
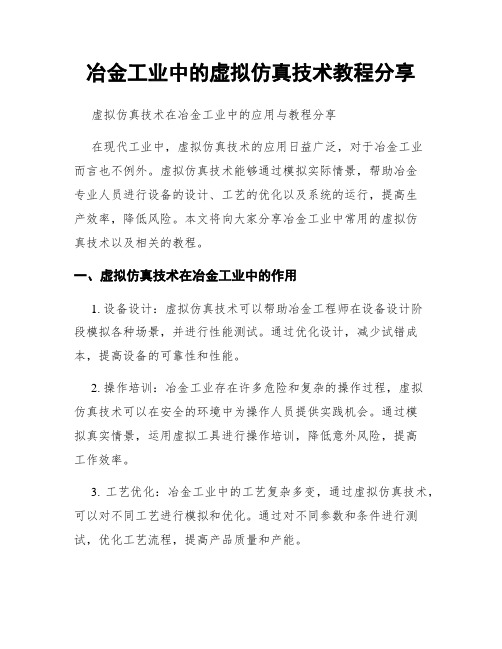
Np 2063.886 2437.638 2762.559 3043.868 3294.725 3517.442 3724.527 3911.491 4085.438 4248.740 Np 2412.143 2625.305 2798.037 2951.928 3083.628 3196.241 3298.484 3389.892 3474.561 3551.260 Np 3140.657 2797.135 2959.415 3091.738 3204.801 3307.535 3399.315 3482.343 3557.758 4132.026 Np 5934.710 5103.750 4445.391 4046.914 3966.351 3401.445 3485.715 3560.291 3632.541 3711.276
=0.002(Pa· s)
=0.321(Pa· s) =0.701(Pa· s) =1.291(Pa· s)
气相
气相
00 10.000 1.000 1.000 10.000 100.000 1000.000 10000.000 100000.000
粘度=0.002(Pa· s)
粘度=0.321(Pa· s) 粘度=0.701(Pa· s) 粘度=1.291(Pa· s)
搅拌仿真实验数据 序号 1 2 3 4 5 6 7 8 9 10 序号 1 2 3 4 5 6 7 8 9 10 序号 1 2 3 4 5 6 7 8 9 10 序号 1 2 3 4 5 6 7 8 9 10 粘度(Pa·s) 0.001 0.001 0.001 0.001 0.001 0.001 0.001 0.001 0.001 0.001 粘度(Pa·s) 0.311 0.311 0.311 0.311 0.311 0.311 0.311 0.311 0.311 0.311 粘度(Pa·s) 0.712 0.712 0.712 0.712 0.712 0.712 0.712 0.712 0.712 0.712 粘度(Pa·s) 1.290 1.290 1.290 1.290 1.290 1.290 1.290 1.290 1.290 1.290 液相 转速(r/min) 扭矩(g) 200 54.2 240 78.9 280 108.4 320 142.9 360 182.5 400 227.4 440 277.7 480 333.4 520 394.8 560 462.0 转速(r/min) 扭矩(g) 210 41.7 250 59.2 290 79.7 330 103.3 370 130.0 410 159.7 450 192.6 490 228.6 530 267.7 570 309.9 转速(r/min) 扭矩(g) 225 57.3 265 66.3 305 87.8 345 112.4 385 140.1 425 170.7 465 204.5 505 241.3 545 281.1 585 324.0 转速(r/min) 扭矩(g) 240 116.2 280 128.2 320 139.2 360 154.4 400 180.9 440 182.7 480 217.4 520 255.3 560 296.1 600 340.0 雷诺数Re 29453.333 35344.000 41234.667 47125.333 53016.000 58906.667 64797.333 70688.000 76578.667 82469.333 雷诺数Re 99.441 118.382 137.323 156.264 175.205 194.146 213.087 232.028 250.969 269.910 雷诺数Re 46.538 54.811 63.085 71.358 79.632 87.905 96.178 104.452 112.725 120.999 雷诺数Re 27.398 31.965 36.531 41.098 45.664 50.230 54.797 59.363 63.930 68.496 Np 6142.179 6209.229 6267.529 6325.799 6383.238 6442.488 6502.100 6559.432 6618.409 6678.041 Np 4286.281 4293.632 4295.814 4299.873 4304.503 4306.459 4311.361 4315.859 4319.960 4323.695 Np 5130.654 4279.617 4278.366 4280.665 4284.497 4283.895 4287.168 4289.016 4289.938 4291.572 Np 9144.644 7412.336 6162.010 5400.394 5125.093 4277.759 4277.206 4279.837 4280.017 4281.141
Re
搅拌仿真实验数据处理结果 序号 1 2 3 4 5 6 7 8 9 10 序号 1 2 3 4 5 6 7 8 9 10 序号 1 2 3 4 5 6 7 8 9 10 序号 1 2 3 4 5 6 7 8 9 10 粘度(Pa·s) 转速(r/min) 0.002 200 0.002 240 0.002 280 0.002 320 0.002 360 0.002 400 0.002 440 0.002 480 0.002 520 0.002 560 粘度(Pa·s) 转速(r/min) 0.321 210 0.321 250 0.321 290 0.321 330 0.321 370 0.321 410 0.321 450 0.321 490 0.321 530 0.321 570 粘度(Pa·s) 转速(r/min) 0.701 225 0.701 265 0.701 305 0.701 345 0.701 385 0.701 425 0.701 465 0.701 505 0.701 545 0.701 585 粘度(Pa·s) 转速(r/min) 1.291 240 1.291 280 1.291 320 1.291 360 1.291 400 1.291 440 1.291 480 1.291 520 1.291 560 1.291 600 气相 扭矩(g)液面高度(mm)初始液面高度(mm) 17.9 284.8 280 30.3 286.1 280 46.5 287.5 280 66.6 288.8 280 90.8 290.1 280 119.1 291.4 280 151.8 292.8 280 188.8 294.1 280 230.3 295.4 280 276.3 296.8 280 扭矩(g)液面高度(mm)初始液面高度(mm) 23.4 280.8 280 35.9 282.3 280 51.3 283.3 280 69.6 285.2 280 90.9 286.7 280 115.1 288.1 280 142.3 289.6 280 172.5 291.0 280 205.7 292.5 280 241.9 293.9 280 扭矩(g)液面高度(mm)初始液面高度(mm) 34.9 281.4 280 42.9 282.8 280 59.8 284.3 280 79.5 285.8 280 102.1 287.2 280 127.7 288.7 280 156.3 290.1 280 187.8 291.6 280 222.3 293.0 280 295.8 294.5 280 扭矩(g)液面高度(mm)初始液面高度(mm) 74.9 281.9 280 87.2 283.4 280 98.7 284.8 280 113.1 286.3 280 136.1 287.8 280 140.5 289.2 280 170.4 290.7 280 203.2 292.1 280 239.1 293.6 280 277.9 296.0 280
液相
液相
10000.000 1000.000
Np
100.000 10.000 1.000 1.000 10.000 100.000 1000.000 10000.000 100000.000
粘度=0.001(Pa· s) 粘度=0.311(Pa· s) 粘度=0.712(Pa· s) 粘度=1.290(Pa· s)
Re
雷诺数Re 14474.210 17287.003 20065.083 22822.126 25551.819 28254.162 30917.585 33564.177 36183.420 38760.587 雷诺数Re 96.067 113.752 131.477 148.584 165.685 182.656 199.370 215.968 232.296 248.520 雷诺数Re 47.032 55.115 63.091 70.977 78.801 86.510 94.164 101.696 109.178 116.533 雷诺数Re 27.191 31.552 35.877 40.142 44.358 48.542 52.662 56.754 60.777 64.532