多参考输入多误差输出FXLMS算_省略_其在机动车辆室内噪声抵消中的应用_胡啸
有源噪声控制技术及其在舰船中的应用
有源噪声控制技术及其在舰船中的应用陈克安【摘要】有源噪声控制技术作为与传统噪声控制技术互补性极强的一种新型噪声控制技术,历经30多年的蓬勃发展,在基础理论、研究方法、关键技术及系统实现等各方面均已形成一套完整的体系,在实际应用、产业化发展和商业推广方面也获得了实质性进展,这为舰船领域中应用该噪声控制技术提供了可能性.首先,综述了开发有源噪声控制系统所必须的声场分析、系统组成及其关键技术,描述了有源控制系统工程应用的典型案例,包括舰船舱室噪声有源控制、管道噪声有源控制等.然后,针对有源控制技术在舰船噪声控制中的进一步应用,论述了有源吸声、有源隔声及智能声学结构等前沿技术的可行性及需要解决的问题.%Due to the rapid development during past three decades, Active Noise Control(ANC) has become a highly complementary noise control approach in comparison with traditional approaches, and has formed a complete system including basic theory, investigation approach, key techniques and system implementation. Meanwhile, substantial progress has been achieved in such fields as the practical application, industrialization development and commercial popularization of ANC, and this developed technique provides a practical and feasible choice for the active control of ship noise. In this review paper, its sound field analysis, system setup and key techniques are summarized, typical examples of ANC-based engineering applications including control of cabin noise and duct noise are briefly described, and a variety of forefronts and problems associated with the applications of ANCin ship noise control, such as active sound absorption, active sound insulation and smart acoustic structure, are subsequently discussed.【期刊名称】《中国舰船研究》【年(卷),期】2017(012)004【总页数】6页(P17-21,34)【关键词】有源噪声控制;声场分析;舰船噪声【作者】陈克安【作者单位】西北工业大学航海学院,陕西西安 710072【正文语种】中文【中图分类】TB535噪声控制是众多行业和领域必须面对的重要问题。
变步长L-FxLMS 算法的车内噪声主动控制研究
Research on Active Control of Vehicle Interior Noise Based on Variable Step L-FxLMS Algorithm Jiang Liangkun Gu Zhihan Cui Huaifeng
出误差。
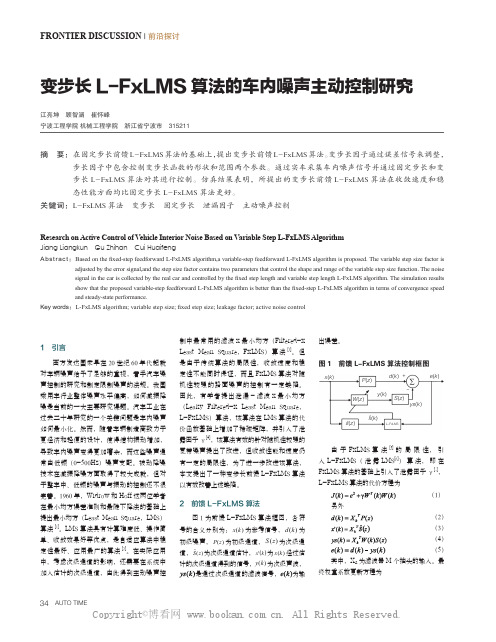
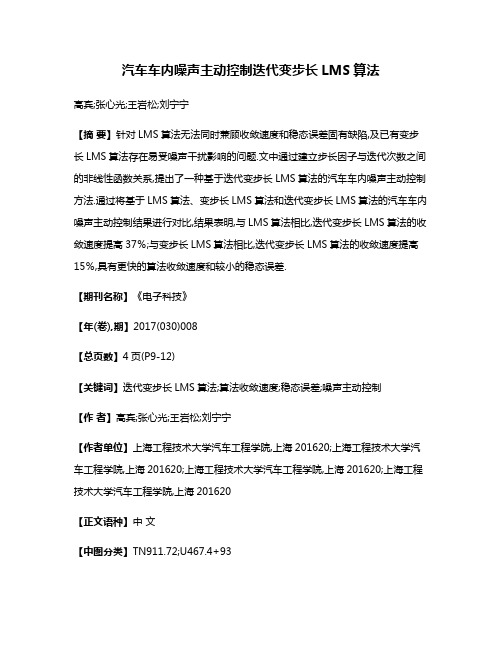
图 1 前馈 L-FxLMS 算法控制框图
x(k)
d(k) +
e(k)
P(z)
∑
W(z)
y(k) S(z)
ys(k)
s(z)
x(k)
L-FxLMS
由 于 FxLMS 算 法 [5] 的 局 限 性, 引 入 L-FxLMS( 泄 露 LMS[6]) 算 法, 即 在 FxLMS 算法的基础上引入了泄露因子 γ[7], L-FxLMS 算法的代价方程为
制中最常用的滤波 x 最小均方(Filtered-x Least Mean Square,FxLMS) 算 法 [3]。 但 是 由 于 传 统 算 法 的 局 限 性, 收 敛 速 度 和 稳 定性不能同时保证,而且 FxLMS 算法对随 机 性 较 强 的 路 面 噪 声 的 控 制 有 一 定 缺 陷。 因 此, 有 学 者 提 出 泄 漏 - 滤 波 x 最 小 均 方 (Leaky Filtered-x Least Mean Square, L-FxLMS)算法,该算法在 LMS 算法的代 价函数基础上增加了稀疏矩阵,并引入了泄 露因子 γ[4],该算法有效的针对随机性较强的 宽带噪声提出了改进,但收敛性能和速度仍 有一定的局限性,为了进一步改进该算法, 本文提出了一种变步长前馈 L-FxLMS 算法 以有效改善上述缺陷。
自适应噪声抵消技术

目录
• 自适应噪声抵消技术概述 • 自适应滤波器原理 • 自适应噪声抵消系统设计 • 自适应噪声抵消技术面临的挑战与解决方
案 • 自适应噪声抵消技术的未来展望
01 自适应噪声抵消技术概述
定义与原理
定义
自适应噪声抵消技术是一种利用信号 处理算法,实时监测和消除噪声的技 术。
原理
硬件实现
传感器选择
根据应用场景选择合适的传感器,如麦克风、 压力传感器等。
微处理器
选用合适的微处理器,实现自适应算法和控 制逻辑。
信号处理电路
设计实现信号的放大、滤波等预处理电路。
电源管理
设计合理的电源管理方案,保证系统稳定运 行。
04 自适应噪声抵消技术面临 的挑战与解决方案
挑战一:噪声模型的不确定性
详细描述
为了实现有效的噪声抵消,自适应算法需要进行多次迭代和复杂的计算。这可能导致实时性能问题,特别是在资 源有限或处理能力不足的设备上。因此,如何在保证算法性能的同时降低计算复杂度,是自适应噪声抵消技术面 临的一个重要挑战。
挑战三:传感器阵列的布局与优化
要点一
总结词
要点二
详细描述
传感器阵列的布局和优化对于自适应噪声抵消技术的效果 具有重要影响。
减小了计算量
归一化LMS算法在实现过程中减小了计算量,提高了算法的效率。
适用范围有限
归一化LMS算法适用于信号与噪声具有一定相关性的情况,对于完全 无关的噪声抵消效果可能不佳。
03 自适应噪声抵消系统设计
系统架构
01
信号采集
通过传感器采集原始信号,包括噪 声和有用信号。
自适应滤波
利用自适应算法对噪声信号进行滤 波处理,以消除噪声干扰。
车内路噪主动控制系统参考传感器布放方法
第 43 卷第 4 期2023 年 8 月振动、测试与诊断Vol. 43 No. 4Aug.2023 Journal of Vibration,Measurement & Diagnosis车内路噪主动控制系统参考传感器布放方法∗贺岩松1,刘亚琪1,夏子恒1,张志飞1,周桃2(1.重庆大学机械与运载工程学院 重庆,400030) (2.重庆市埃库特科技责任有限公司 重庆,400000)摘要由于合理布放参考传感器是车内路噪主动控制(road noise cancellation,简称RNC)系统的关键,提出了基于多重相干分析(multiple coherence analysis,简称MCA)法的参考传感器布置方法,结合多通道归一化滤波x最小均方(normalized filter‐x least mean square,简称NFxLMS)算法,建立基于MCA的参考信号选取数学模型,选取具有最大多重相干系数的布放位置,采用截断奇异值分解法提高多重相干系数的计算精度,并使用遗传算法进行多重相干法布放结果寻优。
针对某电动汽车进行了车内路噪主动控制的仿真分析和实车道路试验。
结果表明,所提出的参考信号布放方法有利于提升车内路噪主动控制系统的降噪效果。
关键词路噪主动控制;参考信号;多重相干法;遗传算法中图分类号TB535;TH771.5引言电动汽车因缺少发动机噪声的掩蔽效应,使车内路噪问题尤为凸显。
车内路噪主动控制作为解决路噪问题的一种新方案,学者们开展了一系列研究[1‐5]。
前馈式路噪主动噪声控制系统需要布置参考传感器,为控制器提供与车内噪声相干的参考信号[5]。
为避免次级声反馈现象[6],参考信号通常选取底盘上的振动加速度信号[1‐5]。
参考信号的质量直接影响系统的降噪效果,选取合适的参考信号布放位置是RNC系统开发的关键。
RNC系统参考信号的选取是为了找到乘客耳旁接收到的路面噪声贡献量较大的一组振动信号。
基于Fu-LMS算法的前馈式噪声主动控制系统研究

㊀2021年㊀第3期仪表技术与传感器Instrument㊀Technique㊀and㊀Sensor2021㊀No.3㊀基金项目:国家科技部专项资助项目(2017YFD0700304⁃02)收稿日期:2019-11-22基于Fu-LMS算法的前馈式噪声主动控制系统研究高永升,李忠利,杨淑君,陈修魁,刘小锋(河南科技大学车辆与交通工程学院,河南洛阳㊀471000)㊀㊀摘要:声反馈的存在,使前馈式控制系统传递函数引入了新的极点㊂传统的基于Fx-LMS算法的前馈式控制系统利用系数很长的滤波器来模拟极点位置,这导致系统计算量增多并且效果不理想㊂针对这一问题,构建了一种基于Fu-LMS算法的控制系统㊂该系统控制的滤波器具有可变极点,利用这一结构特点可以精确模拟实际物理系统的传递函数,系统计算量更少㊂利用MATLAB与Simulink建立模型,分析两种系统降噪效果,并且基于DSP实验平台实现了系统设计㊂实验结果表明,设计的主动控制系统有很好的降噪效果㊂关键词:Fu-LMS;声反馈;滤波器;极点;自适应前馈式噪声控制系统中图分类号:TB535㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1002-1841(2021)03-0112-05ResearchonFeed⁃forwardNoiseActiveControlSystemBasedonFu-LMSAlgorithmGAOYong⁃sheng,LIZhong⁃li,YANGShu⁃jun,CHENXiu⁃kui,LIUXiao⁃feng(VehicleandTransportationEngineeringInstitute,LuoyangUniversityofScienceandTechnology,Luoyang471000,China)Abstract:Withtheexistenceofacousticfeedback,anewpolewasintroducedintothetransferfunctionoffeedforwardcontrolsystem.ThetraditionalfeedforwardcontrolsystembasedontheFx-LMSalgorithmneedstouseafilterwithaverylongcoefficienttosimulatethepoleposition,whichleadstoincreaseincalculationandpoorperformance.Concerningthisissue,acontrolmethodbasedonFu-LMSalgorithmwasconstructed.Thefiltercontrolledbythissystemhasvariablepoles,thetransferfunctionofrealphysicalsystemcanbeaccuratelysimulatedbyusingthisstructurecharacteristicwhichcanachievelesscomputation.MATLABandSimulinkwereusedtoestablishmodelstoanalyzethenoisereductioneffectsofthetwosystems,andthetwosystemswerede⁃signedbasedonDSPtestplatform.Theexperimentalresultsshowthatthesystemhasgoodnoisereductioneffect.Keywords:Fu-LMS;acousticfeedback;filter;pole;adaptivefeedforwardnoisecontrolsystem0㊀引言有源消噪由P.Leug提出,其原理是发声器发出与原噪声频率相同㊁振幅相等㊁相位相反的抵消噪声,利用声波的相消性来消除或削弱原噪声㊂20世纪80年代以前,有源噪声控制系统的控制电路使用模拟电路,这种控制电路无法随噪声和噪声声场变化而改变㊂因此,需要一种能自动跟随初级噪声统计特性㊁控制器可时变的自适应控制系统㊂随着自适应滤波理论发展和DSP芯片技术成熟,有源噪声控制逐渐发展为自适应有源噪声控制㊂噪声主动控制包括前馈控制和反馈控制㊂反馈控制不需要参考信号,结构简单,但系统容易失稳;前馈控制需要精准采集参考信号,系统降噪量㊁稳定性较好㊂常用的前馈式自适应控制系统核心部分由Fx-LMS算法和FIR滤波器组成,但是当存在声反馈时,控制系统传递函数引入了新的极点,FxLMS系统只能通过非常长的滤波器长度来模拟系统的极点,增加了系统的运算量,收敛速度变慢,实际应用降噪效果也不理想㊂因此需要一种运算量小并且降噪能力强的系统[1-3]㊂基于以上背景,提出一种基于Fu-LMS算法的控制系统㊂本文首先对系统模型和滤波器结构进行分析,推导出Fu-LMS算法,利用MATLAB和Simulink设计系统模型㊁进行仿真,最后搭建平台实验验证可行性㊂结果表明,在声反馈下,系统降噪效果良好,从而验证了设计的控制系统的可行性和有效性㊂1㊀前馈式噪声主动控制系统前馈式噪声控制系统的基本结构如图1所示㊂p(t)为初级信号,x(t)为参考传感器产生的参考信号,y(t)为发声器产生的次级信号,e(t)为误差传感器接收的误差信号㊂系统的整个工作流程为:噪声源产生初级信号p(t),参考传感器接收初级信号后生成参考信号x(t),参考信号作为控制器的输入㊂控制器根据算法规则计算出次级信号y(t)输出后经功率放大器驱动次级声源㊂误差传感器同时接收初级信号和次级信号,两者叠加后形成误差信号e(t),误差信号输入到控制器中,自适应算法不断调整控制器权系数,从而改变次级信号强度,直至系统达到稳定状态[4-7]㊂控制器作为主动控制系统的核心部分,包含控制算法和滤波器两个内容㊂㊀㊀㊀㊀㊀第3期高永升等:基于Fu-LMS算法的前馈式噪声主动控制系统研究113㊀㊀图1㊀前馈控制系统示意图随着数字处理技术发展,噪声主动控制系统多采用DSP芯片,这样系统内部之间传递的多为离散信号㊂因此为了分析问题方便,根据图1设计主动控制系统时,可以将系统模型转化离散域形式,如图2所示㊂图2㊀前馈式噪声控制系统离散域框图根据图2,推导控制器传递函数㊂为了简化分析,假设hr(z)=1㊂则图2z域中的误差信号为:e(z)=hp(z)p(z)+hs(z)y(z)(1)y(z)=w(z)p(z)1-w(z)hs(z)hf(z)(2)e(z)=hp(z)p(z)+hs(z)w(z)p(z)1-w(z)hs(z)hf(z)(3)如果参考信号是严格平稳的,hp(z)㊁hs(z)和hf(z)是线性是不变的,则自适应过程充分收敛达到理想状态后将使e(z)=0㊂由式(3)可以求出控制器传递函数为w0(z)=-hp(z)hs(z)-hp(z)hs(z)hf(z)(4)由式(4)可以看到,系统传递函数引入新的极点[8-12]㊂2㊀系统设计原理2.1㊀滤波器结构设计基于Fx-LMS算法的主动控制系统是一种比较经典的前馈式控制系统,该系统采用FIR滤波器㊂这种滤波器传递函数只有一组可变的零点,因此对于存在声反馈的系统,只能利用很长的滤波器系数来模拟实际的极点位置,这导致系统运算量增大,信号延迟也高㊂而无限冲激响应(IIR)滤波器传递函数包括零点和极点两组可调因素,在同样的滤波器设计指标下,IIR滤波器所要求的阶数可能只有FIR滤波器的1/5 1/10,因此IIR滤波器可用较低的阶数来实现较高的选择性[13-16]㊂通过设计IIR滤波器结构,实现对系统的极点匹配,这样不仅降低系统运算量,并且精确性更高㊂实现IIR滤波的方式很多,这里采用2个FIR滤波器相结合的方式实现IIR滤波器功能:前馈滤波器W1和反馈滤波器W2㊂滤波器结构如图3所示㊂2.2㊀算法分析噪声主动控制的核心是自适应控制算法㊂当输图3㊀IIR滤波器结构图入到控制器的信号发生变化时,控制器会根据既定的控制算法实时调整控制器的输出参数,从而实现系统性能最优㊂选择IIR滤波器作为主动控制系统滤波器,根据图2设计主动降噪控制系统结构,结构图如图4所示㊂根据设计的结构图推算出所需要的算法结构㊂图4㊀基于Fu-LMS算法主动降噪控制系统结构图假设前馈和反馈滤波器长度分别为L和M,则输出信号为y(n)=AT(n)X(n)+BT(n)Y(n-1)(5)式中:A(n)为W1滤波器的权值;B(n)为W2滤波器的权值;X(n)为参考矢量;Y(n-1)为滤波器输出矢量㊂A(n)=[a0(n)㊀a1(n)㊀a2(n) aL-1(n)]T(6)B(n)=[b0(n)㊀b1(n)㊀b2(n) bM(n)]T(7)X(n)=[x(n)㊀x(n-1)㊀ x(n-L+1)]T(8)Y(n-1)=[y(n-1)㊀y(n-2)㊀y(n-3) y(n-M)]T(9)于是,误差信号可以表示为e(n)=d(n)-hp(n)y(n)(10)将IIR滤波器的2个滤波器权矢量合并为一个统一的权矢量:W(n)=A(n)B(n)éëêêùûúú(11)参考信号向量为U(n)=X(n)Y(n-1)éëêêùûúú(12)则n时刻的输出为y(n)=WT(n)U(n)(13)此时的误差信号可以表示为e(n)=d(n)-hp(n)WT(n)U(n)(14)对误差信号的平方取平均,有:j(n)=E[e2(n)](15)按最陡下降法原理,根据随机梯度公式推出权重的递推公式:W(n+1)=W(n)-2μe(n)r(n)(16)其中:㊀㊀㊀㊀㊀114㊀InstrumentTechniqueandSensorMar.2021㊀r(n)=U(n)∗hs(n)(17)式中:∗代表卷积运算;hs(n)为次级通道脉冲响应;r(n)为滤波-U信号矢量㊂3㊀仿真与分析根据图4的系统框图,在Simulink里搭建Fu-LMS控制系统仿真模型,如图5所示㊂图5㊀Fu-LMS仿真模型㊀㊀基于Fx-LMS算法的控制系统设计过程参考文献[2],本文在Simulink里搭建Fx-LMS控制系统模型,如图6所示㊂图6㊀Fx-LMS仿真模型㊀㊀搭建的模型除了需要选择合适的算法和滤波器结构,还需要建立精确声通道模型,通道模型精确性对系统的降噪效果有很大影响㊂其中主要包括初级通道㊁次级通道㊁声反馈通道㊂初级通道是:噪声源与参考传感器之间的声场㊁参考传感器㊁AD㊁前置放大器㊁抗混淆滤波;次级通路是:次级声源㊁次级声源与误差传感器之间的声场㊁DA㊁平滑滤波㊁功率放大器;次级声反馈通路是:电声转换㊁次级声源到参考传感器的声场㊂选择各声通道传递函数分别为:初级通道传递函数:㊀p(z)=0.05-0.001z-1+0.001z-2+0.8z-3+0.6z-4+0.2z-5-0.5z-6-0.1z-7+0.4z-8-0.05z-9(18)次级通道传递函数㊀h(z)=0.005-0.01z-1+0.95z-2+0.01z-3-0.9z-4(19)次级声反馈通道传递函数:f(z)=0.6z-1(20)为了便于分析观察,初级噪声采用白噪声与多个正弦信号的叠加信号,初级声源频谱图如图7所示㊂设置Fu-LMS算法前馈㊁反馈滤波器阶数都取为40,前向步长0.0008㊁反馈步长0.0005㊂Fx-LMS算法滤波器阶数取为80,步长0.0001㊂仿真时间5s㊂结果如图8㊁图9所示㊂从8(a)可以看到,Fu-LMS实现了15 20dB的降噪,而Fx-LMS只有8 10dB的降噪,说明设计的系统理论层面上是可行的㊂对比图7(b)㊁图8(b)㊁图9(b)看到,2个系统对低频噪声信号降噪幅度更大,说明主动降噪系统对于低频噪声有很好降噪效果,弥补了传统被动降噪对于低频噪声降噪效果不理想的短板㊂㊀㊀㊀㊀㊀第3期高永升等:基于Fu-LMS算法的前馈式噪声主动控制系统研究115㊀㊀(a)参考信号声压级(b)参考信号频谱图图7㊀参考信号声压级和频谱图(a)误差信号声压级(b)误差信号频谱图图8㊀Fu-LMS系统仿真结果4㊀实验与分析4.1㊀实验平台搭建为了验证设计的主动降噪系统实际使用效果,搭建实验平台进行试验,实验平台选择在常规室内进行,如图10所示㊂(a)误差信号声压级(b)误差信号频谱图图9㊀Fx-LMS系统仿真结果图10㊀主动降噪系统试验平台整个系统的硬件部分主要分为运算部分和被控件部分㊂控制器为系统的运算部分,采用STM32F4系列单片机,其特性如下:主频为168MHz,GPIO口有112个,ADC为24通道,采样时间最快为0.42μs,DAC有2个通道,功耗为238μA/MHz㊂这款单片机采用全新的CortexTM⁃M4内核,集成了单周期DSP指令和FPU(floatingpointunit,浮点单元),对乘加运算的速度非常快,适合数字运算处理㊂被控件部分主要为扬声器1㊁扬声器2㊁拾音器1㊁拾音器2㊂为了使实验平台降噪效果跟仿真模型降噪效果有直观对比,试验平台的初级噪声采用仿真所用噪声㊂扬声器1为初级声源,产生初级噪声㊂扬声器2为次级声源,受控制器控制发出抵消新声波㊂拾音器利用咪头采集声音信号并经过放大后输㊀㊀㊀㊀㊀116㊀InstrumentTechniqueandSensorMar.2021㊀出,输出模拟信号㊂经过AD转换器后,模拟信号转换成数字信号输入到控制器㊂拾音器1采集传递到此处的声音作为参考信号输入到控制器内㊂拾音器2采集此处的声音作为误差信号输入到控制器㊂分贝仪和Autotest数据采集器能够将拾音器2处的误差信号采集输入到计算机,为后期对比提供数据支持㊂整个试验的控制思路可以参考第1节内容㊂系统的软件部分主要为在KEIL_5开发环境下编写2个主动降噪控制系统的C语言程序,不断进行调试确定控制算法无误,然后将程序下载到控制器内㊂4.2㊀试验结果分析分别进行两个主动降噪系统平台实验,同时利用分贝仪和数据采集器将测得的误差信号存储在计算机中㊂利用MATLAB处理采集的数据,画出误差信号声压级随时间变化的二维坐标图,如图11所示㊂(a)基于Fu-LMS算法的系统(b)基于Fx-LMS算法的系统图11㊀平台实验的误差信号对比图11㊁图8(a)㊁图9(a)看到,基于Fu-LMS算法的系统平台实验降噪效果比基于Fx-LMS算法的系统多了5dB左右,但比模型仿真结果低了2 3dB㊂经过分析原因提出了一些改进措施:建立的声通道模型可以再精准些;控制器可以采用专门的数字信号处理芯片和AD/DA转换芯片相结合的方式㊂但是综合来看,本次提出的噪声主动控制系统在声反馈环境中有着理想降噪的效果㊂5㊀结束语本文首先研究了存在声反馈的前馈式噪声主动控制系统结构及其控制算法,在Simulink中搭建了控制系统模型,仿真结果显示系统降噪效果良好㊂最后,搭建控制系统实验平台,分别对2种系统进行实验㊂试验结果表明,基于Fu-LMS算法的主动控制系统在声反馈下的降噪效果有很好的优势㊂下一步将对系统做出改进调整并且应用到实际场合中㊂参考文献:[1]㊀裴春明,刘姜涛,刘震宇,等.基于自适应技术的低频噪声控制研究[J].武汉大学学报(工学版),2013,46(3):371-375.[2]㊀陈智.基于FxLMS算法的前馈式自适应有源噪声控制系统建模与仿真[J].自动化与仪器仪表,2018,(5):10-13.[3]㊀马进,邹海山,邱小军.存在声反馈的前馈有源噪声控制系统性能分析[J].声学学报,2016,41(5):686-693.[4]㊀陈克安.有源噪声控制[M].3版.北京:国防工业出版社,2014.[5]㊀周遥.基于DSP的主动噪声控制系统研究与硬件实现[D].杭州:浙江工业大学,2013.[6]㊀张大勇,凌强,计炜梁,等.基于DSP的实时降噪系统设计与实现[J].微型机与应用,2016(14):89-92.[7]㊀杨忠敏.汽车减振降噪技术的发展现状及趋势[J].汽车工业研究,2016(2):21-25.[8]㊀张频捷,张立军,孟德建,等.汽车车内噪声主动控制系统扬声器与麦克风布放优化方法[J].振动与冲击,2017(5):169-175.[9]㊀刘斌.车内噪声主动控制系统设计与实验研究[D].长沙:湖南大学,2017.[10]㊀杨鹏,应黎明,陈敏,等.ANC系统次级通道背景噪声的处理方法[J].电测与仪表,2017,54(8):99-103.[11]㊀ERIKSSONLJ.Developmentofthefiltered⁃Ualgorithmforactivenoisecontrol[J].J.Acoust.Soc.Am,1991,89:257-265.[12]㊀HONGSP,SANGKL,HOWK,etal.Modified⁃filtered⁃uLMSalgorithmforactivenoisecontrolanditsapplicationtoashortacousticduct[J].MechanicalSystems&SignalPro⁃cessing,2011,25(1):475-484.[13]㊀黄全振,吕宽洲,李恒宇,等.基于IIR结构的自适应滤波振动主动控制方法[J].振动测试与诊断,2014(3):439-446.[14]㊀QICL,HUAH.Simulationofactivenoisecontrolsystemonthetruckinteriorcab[J].AdvancedMaterialsResearch,2013,798/799:443-447.[15]㊀ZHAOXD,LIX,DINGR.Enhancementoflow⁃frequencysoundabsorptionofmicro⁃perforatedpanelsbyaddingamechanicalimpedance[J].声学学报(英文版),2015,34(1):27-36.[16]㊀蔡松林.抗冲击噪声干扰的主动噪声控制算法研究[D].成都:西南交通大学,2016.作者简介:高永升(1993 ),硕士研究生,主要研究方向为电控测试㊂E⁃mail:1904523483@qq.com通信作者:李忠利(1969 ),副教授,硕士,主要研究方向为汽车电子控制㊂E⁃mail:lylzl69@163.com。
基于LMS算法的多麦克风降噪

基于LMS算法的多麦克风降噪在麦克风采集音频信号时,常常会受到环境噪声的干扰,从而影响到音频信号的质量和清晰度。
为了提高音频质量,需要采用降噪技术进行处理。
其中,Least Mean Square (LMS) 算法是常用的一种降噪算法,在多麦克风降噪中应用广泛。
LMS算法是一种递推算法,通过不断调整权重来进行降噪处理。
它的基本思想是根据期望输出和实际输出之间的误差,计算出需要调整的权重值,从而不断优化降噪效果。
在多麦克风降噪中,可以通过使用多个麦克风同时采集环境噪声和信号源的混合信号,并利用LMS算法来估计出信号源的权重和环境噪声的权重,从而实现降噪的效果。
具体实现过程如下:1.数据采集:使用多个麦克风同时采集环境噪声和信号源的混合信号。
2.初始化权重:对每个麦克风的权重进行初始化,可以选择随机初始化或者根据先验知识进行选择。
3.信号分离:利用初始化的权重,将混合信号分离成信号源和环境噪声两部分。
4.误差计算:根据期望输出和实际输出之间的误差,计算出需要调整的权重值。
5.权重更新:根据误差计算的结果,更新每个麦克风的权重值。
6.重复步骤3-5,直到收敛。
7.合成输出:根据调整后的权重,将信号源进行合成,得到降噪后的音频信号。
LMS算法的优点是简单易实现,并且可以在线更新权重值。
但是它也存在一些问题,比如收敛速度慢,对信号源和噪声的统计特性要求较高等。
为了提高降噪效果,可以结合其他的降噪算法,比如频域降噪算法或者深度学习算法。
总结来说,基于LMS算法的多麦克风降噪是一种常用的降噪技术,可以通过逐步更新权重来实现降噪效果。
不过在实际应用中,还需要考虑到算法的优缺点,以及如何结合其他算法进行进一步优化。
变步长CFxLMS算法及其在电梯噪声主动控制中的仿真
CFxห้องสมุดไป่ตู้MS Algorithm with Variable Step Size and its Application to Simulation of Elevator Cabin Noise Active Control
MA Yingbo , WU Yafeng , YANG Xinbo
改进变步长LMS算法及在自适应噪声抵消中的应用
之 间 的非 线 性 关 系 , 出 了一 种 改 进 的 变步 长 L 提 MS自适 应 滤 波 算 法 , 将 其 应 用 于 自适 应 噪 声 抵 消 中 , 分 析 了 并 还
Ap ia i n i pl to n Ada i e No s nc l to c ptv ie Ca e l i n a
S HEN e , Y Li AO h h h a S a —u
( l tcl n n r t nE gneigC l g , n u Ee r a adIf mao n ier o ee A h i ci o i n l U i r t o cec nv sy f i e& T c nlg ,H a a n u 3 0 , hn ) e i S n eh o y ui nA h i 2 0 C ia o n 2 1
中图分类号:T 9 1 N 1. 7
文献标识码: A
D I O 编码 :0 3 6 /.s .0 6—15 .0 0 0 . 1 1 .9 9 ji n 10 s 3 5 2 1 ቤተ መጻሕፍቲ ባይዱ5 0 4
I po e m r v d LM S Alo ihm t ra e S e S z n t g rt wih Va ibl tp- ie a d Is
t e i o n . h m Sf u d K e o ds: a o si s smu a in t c noo ;LM S ag rt m t a ib e se sz yw r c u t ; i l t e h lg c o y lo ih wih v ra l tp・ie;a a tv l d p ie f — i t rn e i g;n ie c n e lto o s a c l in;c n e g n e s e d a o v re c p e
汽车车内噪声主动控制归一化LMS算法
汽车车内噪声主动控制归一化LMS算法王开轩;张心光【摘要】通过对汽车车内噪声采集试验数据进行分析,运用最小均方(LMS)算法和归一化LMS算法,分别对自适应滤波器中的权向量按照最速下降算法进行更新,并利用建立的自适应滤波器进行汽车车内噪声主动控制.通过比较汽车车内噪声主动控制结果,表明:与LMS算法相比,归一化LMS算法具有更快的算法收敛速度和较小的稳态误差,其收敛速度提高58.3%,其稳态误差降低62.5%.【期刊名称】《机电设备》【年(卷),期】2017(034)005【总页数】4页(P43-46)【关键词】归一化LMS算法;算法收敛速度;稳态误差;噪声主动控制【作者】王开轩;张心光【作者单位】上海工程技术大学汽车工程学院,上海 201620;上海工程技术大学汽车工程学院,上海 201620【正文语种】中文【中图分类】U467.4+93随着汽车技术的快速发展,消费者越来越关注汽车运行产生的车内噪声问题。
汽车车内噪声不仅严重影响乘客的乘坐舒适性、会话清晰度以及驾驶员对各种信号的识别能力,也使汽车发生事故的概率有所提高[1]。
噪声被动控制方法和噪声主动控制方法是抑制汽车车内噪声的两种主要方法[2-3]。
与噪声被动控制方法相比,噪声主动控制方法可以有效抑制以低频噪声为主的汽车车内噪声[4]。
在自适应主动噪声控制系统中,多采用算法简单、计算量小和稳定性强的最小均方(Least Mean Square,LMS)算法,目前,这种算法已被广泛应用于车辆车内噪声降噪控制系统[5-8]。
一般来说,LMS算法存在无法兼顾算法收敛速与稳态误差的固有缺陷。
为解决LMS算法的这一缺陷,许多改进型LMS算法被提出。
在众多改进型LMS算法中,变步长LMS算法是应用最广的一种算法。
文献[4]应用变步长LMS算法进行车内噪声主动控制,为车内噪声主动控制提供了一种有效方法。
然而,与变步长LMS算法相比,归一化LMS算法[9-10]具有更快的收敛速度及较低的稳态误差。
基于NFXLMS算法的车内道路噪声主动控制系统

第39卷第21期振动与冲击JOURNAL OF VIBRATION AND SHOCK Vol.39No.21 2020基于N F X L M S算法的车内道路噪声主动控制系统张立军$’2,张希玉$’2,孟德建$&2(1.同济大学汽车学院,上海201804;2.同济大学智能型新能源协同创新中心,上海201804)摘要:针对车内结构型道路噪声的时变、宽带、随机特性,建立基于归一化参考信号滤波最小均方误差 (Normalized F i l t e r-x Least Mean Square’N F X L M S)算法的道路噪声主动控制系统。
首先通过理论推导,分别建立了多通道 参考信号滤波最小化均方误差(F i l t e r-x Least Mean Square,F X LMS)算法和N F X L M S算法,计算复杂度分析表明NFXLMS 算法的计算量增量可以忽略。
然后,在Srnrnlmk中搭建了两种算法的车内道路噪声主动控制系统离线仿真模型,以破损粗沥青路面采集的车内道路噪声数据进行离线仿真,结果表明基于N F X L M S算法的道路噪声主动控制系统具有更好的 鲁棒性和工况适应性。
最后,用MicuAutoBox作为实时控制器,搭建了基于N F X L M S算法的车内道路噪声主动控制系统 硬件在环试验平台,通过实车道路试验验证了该系统的有效性。
关键词:噪声主动控制;车内道路噪声;N F X L M S算法中图分类号:TB535 文献标志码:A DOI:10.13465/ki.jvs.2020.21.023Acti'^e control s y s t e m of vehicle interior r o a d noise b a s e d o n N F X L M S algorithmZHANGLijim1’2 ’ ZHANGXiyu1’2 ’ MENGDejian1’2(1.School o f Automotive Engineering,Tongji University,Shanghai201804 ’China;2.Collaborative Innovation Center f o r I n t e l l i g e n t New Energy Vehicle,Tongi University,Shanghai201804’China)Abstract:Here,aiming at time-varying,broadband and random characteristics of vehicle interior structure-borne road noise,the road noise active control system was establislied based on the normalized filter-x least mean square (N F X L M S)algorithm.Firstly,through theoretical deriving,the multi-channel filter-x least mean square(F X L M S) algorithm and the multi-channel N F X L M S algorithm were established’respectively.The showed that the computational increment of N F X L M S algorithm can be negligible.T h e vehicle interior road noise active control system were built with the two algorithmsin Simulink.The off-line simulation using data collected from damaged rough asj^halt pavement showed that the road noise activecontrol system based onN F X L M S algorithm has better r obustness and working condition adaptability.Finally,a MicroAutoBox was taken as the real-time controller,the hardware-in-loop test platform for the vehicle interior road noise active control system based onN F X L M S algorithm was built,and actual road tests were conducted to verify the effectiveness K e y w o r d s:noise active control;vehicle interior road noise;N F X L M S algorit!im车内道路噪声一直是汽车车内噪声的重要组成部 分。
多通道fxlms算法matlab
多通道fxlms算法matlabFXLMS(Filtered-X Least Mean Square)算法是一种自适应滤波算法,常用于消除信号中的噪声。
它通过不断调整滤波器的权值,使得滤波器的输出与期望信号之间的误差最小化。
在实际应用中,多通道FXLMS算法常用于处理多通道信号,以提高滤波效果。
MATLAB是一种功能强大的数学软件,它提供了丰富的工具箱和函数,可以方便地实现多通道FXLMS算法。
下面将介绍如何使用MATLAB实现多通道FXLMS算法。
首先,我们需要准备两个信号:输入信号和期望信号。
输入信号是待滤波的信号,期望信号是我们希望得到的信号。
在多通道FXLMS算法中,我们可以使用多个输入信号和多个期望信号,以提高滤波效果。
接下来,我们需要定义滤波器的初始权值。
在MATLAB中,可以使用一个向量来表示滤波器的权值。
我们可以将初始权值设置为零向量,然后通过算法不断调整权值。
然后,我们需要定义步长参数。
步长参数决定了滤波器权值的调整速度。
如果步长参数过大,可能会导致算法不稳定;如果步长参数过小,可能会导致算法收敛速度过慢。
在实际应用中,可以通过试验和调整来确定合适的步长参数。
接下来,我们可以使用MATLAB中的循环结构来实现多通道FXLMS算法。
在每一次迭代中,我们需要计算滤波器的输出和误差信号,然后根据误差信号和步长参数来调整滤波器的权值。
具体的计算公式可以参考FXLMS算法的原理。
最后,我们可以通过比较滤波器的输出和期望信号,来评估滤波效果。
在MATLAB中,可以使用均方误差(MSE)来衡量滤波效果。
MSE越小,表示滤波效果越好。
总之,多通道FXLMS算法是一种常用的自适应滤波算法,可以用于消除信号中的噪声。
MATLAB提供了方便的工具和函数,可以方便地实现多通道FXLMS算法。
通过合理选择参数和调整算法,我们可以得到较好的滤波效果。
希望本文对您理解多通道FXLMS算法的MATLAB实现有所帮助。
一种改进的LMS算法及其在噪声对消中的应用
第28卷第3期 计算机应用与软件Vo l 28No .32011年3月 Co m puter Applicati o ns and Soft w are M ar .2011一种改进的L M S 算法及其在噪声对消中的应用崔大鹏 行小帅 李 竹 张 辉(山西师范大学物理与信息工程学院 山西临汾041004)收稿日期:2009-12-25。
山西省青年科技研究项目(20031008)。
崔大鹏,硕士生,主研领域:人工神经网络和智能信号处理。
摘 要 在分析传统定步长LM S(LeastM ean Square)算法和变步长LM S 算法的基础上,提出了一种改进的变步长LM S 算法。
新算法利用瞬时误差绝对值三次方的指数形式和遗忘因子同时调整步长,更好地解决了收敛速度和稳态误差的矛盾。
将三种算法均用到噪声对消中进行比较,仿真结果表明:新算法收敛速率优于传统定步长L M S 算法和变步长LM S 算法。
关键词 L M S 算法 变步长 瞬时误差 遗忘因子 噪声对消AN I M PROVED L M S ALGORI THM AND I TS APPL I CATI ON I N NO ISE CANCELLATI ONCu iDapeng X ing X i a oshuai Li Zhu Zhang H u i(S c hool of P hysics and Infor m ation E ng i n ee ring,ShanxiN or m al Universit y,L i nfe n 041004,Shanxi ,C hina )Abstrac t Based on the ana l ysis o f traditiona l L M S a l gor it hm s w ith fi xed step size and var iab l e step size ,this paper presents an i m proved va riab l e step size LM S a l gor it hm .By u tilizi ng the exponential form o f t he cube of i nstan taneous error s abso l ute value and the fo rgetti ng factor si m u ltaneously ,the ne w a l go rith m ad j usts t he step size so t hat it better so l ves the contradicti ons o f converg ence speed and steady erro r .A p -p l y i ng three algor i th m s to noise cance llati on and compar i ng t he m,t he si m ulati on resu lts show tha t ,the ne w algor it h m pe rfor m s be tter than conv enti ona l fi xed step size LM S a l go rith m and var i able step size L M S algor it h m i n conve rgence ra te .K eywords L M S a l gor it hm V ariab l e step sizeInstantaneous erro r Fo rgetti ng facto r N o ise cance llati on0 引 言文献[1]提出的LM S 算法因其结构简单、计算量小、易于实现实时处理等优点,在噪声对消、谱线增强、系统辨识等方面得到广泛应用。
改进FxLMS算法在主动振动控制中的应用

改进FxLMS算法在主动振动控制中的应用束建华;付志浩【期刊名称】《计算机工程与应用》【年(卷),期】2015(000)012【摘要】FxLMS(Filtered-x Least Mean Square)算法在主动振动控制系统中有着广泛的应用,在实际系统中由于参考输入信号会混入诸如测量噪声、冲击噪声、野值等与参考信号不相关的干扰信号,这会导致系统更新稳定性性能变坏,甚至发散。
针对这个问题,提出一种改进的FxLMS算法。
新的算法利用跟踪微分滤波器和非线性变换函数分别对参考输入信号和反馈误差信号进行处理。
同时,以滤波器更新向量的差值最小为优化条件推导出新的更新公式。
通过在主动振动控制系统中与已有算法进行仿真比较,仿真结果证明在处于噪声干扰的情况下新的算法体现出更好的更新稳定性。
%FxLMS(Filtered-x Least Mean Square)has been used widely in AVC(Active Vibration Control)system. In practice, the signal produced by the sensors contains not only the signal but also interference, such as measurement noise or burst noise, which deteriorate the AVC system. In order to solve this problem, a new robust filtered-x LMS algorithm is proposed. A Tracking-Differentiator filter and a non-linear transformation function are designed to process the reference and error signals respectively. The updating formula of the filter coefficients in the proposed algorithm is derived from a new minimization criterion that minimizes the Euclidean norm of difference between the currently innovation vector and past vector. Compared with the existing algorithms,the proposed algorithm is more robust against interference to reference signals. Numerical simulation results show the effectiveness of the algorithm.【总页数】5页(P230-234)【作者】束建华;付志浩【作者单位】安徽中医药大学医药信息工程学院,合肥 230008;中国科学技术大学信息科学技术学院,合肥 230027【正文语种】中文【中图分类】TP273+.2【相关文献】1.应用自适应陷波器技术改进FXLMS算法 [J], 陈晓曾;陈勇;刘永刚2.SARAX-FXS程序针对非均匀快堆r堆芯计算中的改进及应用 [J], 杜夏楠;曹良志;郑友琦3.VS-MFxLMS算法及其在汽车车内噪声有源控制中的应用 [J], 张帅;王岩松;张心光;李文武4.一种VSSFxLMS算法及其在多自由度微振动控制中的应用 [J], 方昱斌;朱晓锦;胡佳明;高志远;苗中华5.多参考输入多误差输出FXLMS算法及其在机动车辆室内噪声抵消中的应用 [J], 胡啸;仓玉萍;马迁;胡爱群因版权原因,仅展示原文概要,查看原文内容请购买。
汽车车内噪声主动控制迭代变步长LMS算法
汽车车内噪声主动控制迭代变步长LMS算法高宾;张心光;王岩松;刘宁宁【摘要】针对LMS算法无法同时兼顾收敛速度和稳态误差固有缺陷,及已有变步长LMS算法存在易受噪声干扰影响的问题.文中通过建立步长因子与迭代次数之间的非线性函数关系,提出了一种基于迭代变步长LMS算法的汽车车内噪声主动控制方法.通过将基于LMS算法、变步长LMS算法和迭代变步长LMS算法的汽车车内噪声主动控制结果进行对比,结果表明,与LMS算法相比,迭代变步长LMS算法的收敛速度提高37%;与变步长LMS算法相比,迭代变步长LMS算法的收敛速度提高15%,具有更快的算法收敛速度和较小的稳态误差.【期刊名称】《电子科技》【年(卷),期】2017(030)008【总页数】4页(P9-12)【关键词】迭代变步长LMS算法;算法收敛速度;稳态误差;噪声主动控制【作者】高宾;张心光;王岩松;刘宁宁【作者单位】上海工程技术大学汽车工程学院,上海201620;上海工程技术大学汽车工程学院,上海201620;上海工程技术大学汽车工程学院,上海201620;上海工程技术大学汽车工程学院,上海201620【正文语种】中文【中图分类】TN911.72;U467.4+93随着汽车技术的发展,汽车运行产生的车内噪声问题越来越引起消费者的关注,车内噪声不仅严重影响乘坐舒适性、会话清晰度及驾驶员对各种信号的识别能力,也使汽车发生事故的概率大幅提高[1]。
降低汽车车内噪声的主要方法包括噪声被动控制方法[2]和噪声主动控制方法[3]。
被动噪声控制方法主要包括吸声、隔声及使用消声器等,对中、高频噪声的抑制有很好的效果,但对低频噪声抑制效果较差。
与被动噪声控制方法相比,主动噪声控制方法可以有效抑制低频噪声,并且可以使整个系统体积小,便与设计与控制,已被广泛应用于车内噪声控制。
在众多汽车车内噪声主动控制系统中,其难点在于如何改进汽车车内噪声主动控制算法。
基于维纳滤波而推出的最小均方算法(Least Mean Square,LMS)因其具有算法结构简单、计算量小和稳定性强等优点,目前已被广泛用于车辆车内噪声降噪方法[4-7]。
LMS算法在噪声抵消中的应用

LMS算法在噪声抵消中的应用冯振勇,王玉良北京邮电大学信息工程学院,北京(100876)E-mail:fengzhenyong1984@摘要:自适应噪声干扰抵消器是基于自适应滤波器原理的一种扩展。
本文首先根据自适应LMS滤波器的设计理念介绍了噪声抵消器的原理,得出自适应抵消器只有参考输入噪声与原始输入噪声存在相关性,才能有效的抵消噪声的结论;在此基础上进行了稳定噪声抵消的求解,以单输入单输出维纳滤波器系统为例,通过滤波器的误差公式和转移函数求得维纳滤波器问题的无约束非因果解;随后利用LMS算法设计了自适应单信道噪声抵消器,根据前两步的分析,将自适应抵消器的参考输入信号谱函数分解,求得维纳解的最佳转移函数;最后通过MATLAB仿真实验证明了LMS算法在自适应滤波去噪中的优势,并对结果进行了分析。
关键词:LMS算法;自适应单信道噪声抵消器;自适应滤波中图分类号:TN7131. 引言自适应噪声抵消器是利用自适应噪声抵消技术,从背景噪声中提取语音信号,以提高语音的清晰度。
其目的是把信号中的噪声和语音信号进行有效地分离,降低环境噪声的影响。
自适应干扰对消是通过自适应过程加以控制的,它可以在信号很微弱或信号用常规的方法无法检测的噪声干扰场中,将从一个或多个传感器所取得的参考输入加以过滤,并从包含信号和噪声的原始输入中减去,最后结果是原始信号中的噪声或干扰被衰减或消除,而保留了有用信号[1]。
噪声干扰对消可完成时间域(频域)的滤波,也可实现空间域的滤波,因此自适应干扰对消具有广泛的应用范围。
例如消除心电图中的电源干扰、检测胎儿心音时滤除母亲的心音及背景干扰、在有多人讲话的场合下提取某人的讲话、作为天线阵列的自适应旁瓣对消器。
2. 自适应噪声抵消器的设计理论上讲,自适应噪声干扰抵消器是基于自适应滤波器原理的一种扩展。
简单的说,把d n改为信号加噪声干扰的原始输入端,而它的输入端改自适应滤波器的期望信号输入端()为噪声干扰端,有横向滤波器的参数调节输出以将原始输入端的噪声抵消掉,这时误差输出就是有用信号了。
变步长CFxLMS算法及其在电梯噪声主动控制中的仿真
变步长CFxLMS算法及其在电梯噪声主动控制中的仿真马英博;吴亚锋;杨鑫博【摘要】提出一种改进的CFxLMS(Correlation FxLMS)算法,该算法使用滤波参考信号与误差信号的相关函数控制步长更新.即随着相关函数的减小,步长也逐渐减小,从而提高了算法的实时性,较好地解决了传统FxLMS算法因步长固定带来的稳态误差大和实时跟踪能力弱的问题.为进一步验证改进算法的性能,将CFxLMS算法应用于高速电梯的轿厢内噪声主动降噪仿真中,并与FxLMS算法的结果进行对比.【期刊名称】《噪声与振动控制》【年(卷),期】2018(038)005【总页数】5页(P57-61)【关键词】声学;主动噪声控制;变步长;CorrelationFxLMS(CFxLMS)算法;电梯噪声;仿真计算【作者】马英博;吴亚锋;杨鑫博【作者单位】西北工业大学动力与能源学院,西安 710129;西北工业大学动力与能源学院,西安 710129;西北工业大学动力与能源学院,西安 710129【正文语种】中文【中图分类】TB535主动噪声控制(Active Noise Control)是一种噪声控制的新技术[1]。
它根据源噪声的特性,通过自适应控制系统(adaptive control system)人为地产生一同频、反相、等幅的抵消声场,从而达到降低源噪声的目的。
在主动噪声控制系统[1]中,自适应滤波器(Adaptive Filter)是其核心技术。
其中最常用的滤波算法是滤波-x最小均方(Filter-x LMS)算法,该算法具有计算量小,易于实现,稳定性好等特点。
在FxLMS算法中,步长是决定算法收敛速度和稳态误差的关键因素,增大步长可加快算法的收敛速度,但同时会增大稳态误差,甚至导致算法发散。
为此,人们提出了变步长的改进思路[2–3],即:在算法收敛初期步长较大,以便有较快的收敛速度和对时变系统的跟踪速度;随着算法收敛的进行,步长逐渐减小;在算法收敛末期步长很小,以便有较小的稳态误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 1. 东南大学 无线电工程系 , 江苏 南京 210096; 2. 信阳师范学院 物理系 , 河南 信 阳 464000) 摘 要 : 针对改善坦克、 汽车等多发动 机机动车辆室内噪 场环境这一课题 , 在系统研究自 适应信号 处理和 主动噪声控制方法的基础上 , 推导了多参考输入多误差输出 FX L M S 算法 , 提出了基于多参考输入 多误差输出 FXL M S 算法的机动车辆室内主动噪声控制方案 , 并给出了计算机仿真结果 . 关键词 : 主动噪声控制 ; 前馈主动噪声控制 ; 仿真 中图分类号 : T B533. 1 文献标识码 : B 文章编号 : 1003-0972( 2001) 03-032904
x 11 ( n ) I X ( n) = x 12 ( n ) I … x R H ( n ) I ( 3)
330
胡啸等 : 多参考输入多误差输出 F XL M S 算法 及其在机动车辆室内噪声抵消中的应用
分 析可见, 当 ûe ( n ) û较大时 采用 F XNV S 算 法 , 保证算法有较快的收敛速度和较小的失调; 当û e( n ) û较小时采用 L MS 算法 , 只要能合理选择步长 因子 L0 , 就可以保证算法有较快的收敛速度和较 小的失调 , 可见, MF XNV S 算法在整个自 适应滤 波过 程中都能 保持较快 的收敛 速度 和较小 的失 调[ 6] .
收稿日期 : 20001113 作者简介 : 胡 啸 ( 1968) , 男 , 河南罗山人 , 硕士生 , 主 要从事噪声抵消、 噪声控制及 通信信号处理方面的 研究工作 ; 胡爱 群 ( 1965-) , 男 , 博士 , 教授 , 科学部十五科技 攻关计划信息领域 总体组成员、 重大项目组成员 , 主要从事信 号与 信息处理方面的研究工作 .
( 8)
故在实际应用中 , 步长因子矩阵 M 应按下式 选取:
M r h = L0 Q r h tr ace
{FH rh F r h}
I
( 9)
式 ( 6) 和式 ( 9) 给出的算法实际上是一种归一 化的 FXL MS 算法 , Q r h的引入能有效地扩大算法的 动态范围, 但该算法没能很好地解决 F XL M S 算法 在时变系统中跟踪能力差的问题, 为了改善该算法 的这一不足 , 我们提出归一化变步长 F XL M S 算法 ( M F XNVS) : H H W ( n + 1) = W ( n ) - 2MX ( n) F e( n )
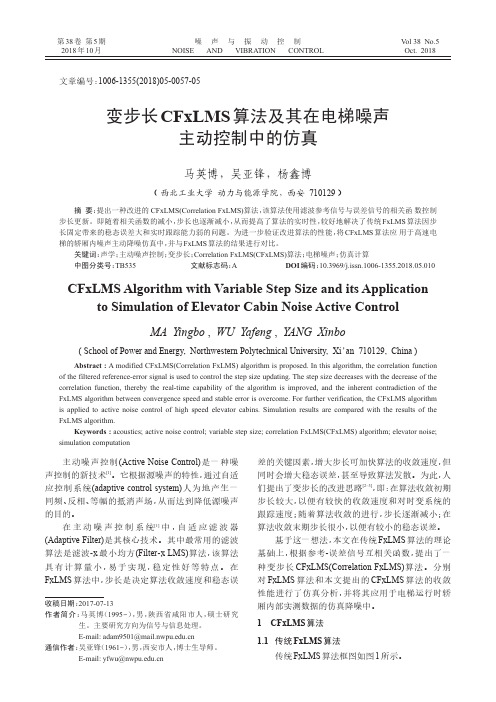
= cos ( 6. 3×P×n + 3 ×P/ 5) ; x 22( n ) = cos( 6. 303× P× n) 三种情况, 对该算法的降噪效果进行了计算 机仿真 . 仿真结果如图 3. 其中横轴表示采样点 数 , 纵轴表示系统输出 .
3 机动车辆室内主动噪声控制方案
图 2 给出了用以抵消车室内由二发动机产生 噪声基频分量的二参考输入二误差输出窄带前馈 主动控制系统 , 图中虚线部分表示车室 . 在实际的 方案实现中, 作为次级声源的扬声器可分散安装在 车室内壁上, 作为噪声测量传感器的麦克风可安装 在接近人耳的座椅靠背上 . 为清楚观察多参考输入多误差输出 FXL MS 算法的噪声抵消性能 , 我们以参考信号分别为: x 1 ( n) = cos ( 5. 2 × P × n ) , x 2 ( n ) = cos ( 6. 3 × P×n ) , 参考信号 x 1( n ) 的声学路径: F 1= [ 1 0. 2+ j ×0. 3; 0. 2+ j ×0. 31] ; 声学路径估计为: F 3 = [ 1 0. 6+ j × 0. 3; 0. 6+ j × 0. 6 1] , 参考信号 x 2 ( n ) 的声学路 径 : F 2 = [ 1 0. 3+ j × 0. 2; 0. 3+ j × 0. 2 1] , 声学路 径估计为 : F 4 = [ 1 0. 3+ j × 0. 5; 0. 3+ j × 0. 5 1] , 噪声信号: x 11 ( n) = co s ( 5. 2× P × n) ; 噪声信号 x 22 ( n) 分别为: x 22( n ) = cos ( 6. 3×P×n ) ; x 22 ( n)
329
第 14 卷 第 3 期
信阳师范学院学报 ( 自然科学版 )
2001 年 7 月
车辆室内噪声的最主要来源 [ 3] . 由于发动机产生 的低频周期噪声中 , 噪声的频谱仅仅对应了发动机 转速的基频和离散的高几阶频率 , 频谱较窄 , 所以, 可以利用窄带前馈主动噪声控制系统来改善车室 的噪声状况 . 通常噪声源和环境因素是时变的 , 而 控制系统又是受环境因素影响的 , 为了能跟踪噪声 源和环境因素的变化, 实时调节次级声信号 , 确保 次级声信号有效地低消噪声信号 , 必须采用自适应 技术来完成系统控制 . 综上所述 , 多发动机机动车 辆室内有源噪声控制系统应采用多参考输入多误 差输出窄带前馈主动噪声控制系统, 其基本原理如 图 1. 则:
统的性能 . 单参考输入有源噪声控制系统 , 是只用一个转 速计来采集多个发动机中的其中一个发动机的转 速信号, 并以此转速信号来产生参考信号; 而多参 考输入有源噪声控制系统是利用多个转速计来分 别采集每一个发动机的转速信号, 并用这些转速信 号来分别产生参考信号 . 这样单参考输入有源噪 声控制系统的参考信号中就只包含一个噪声源的 频率成分, 而多参考输入有源噪声控制系统的参考 信号中则包含了所有噪声源的频率成分 . 因此我 们可以推断 : 当发动 机的转速一致或者近似一致 时 , 两种有源噪声控制系统的降噪效果相差不大, 当发动机的转速相差较大时, 多参考输入有源噪声 控制系统的性能将明显优越于单参考输入有源噪 声控制系统 . 通常用空间的总噪声辐射或者声势能作为空 间噪声标准 , 但两者都是不易测量的 , 因此, 我们在 实际的噪声控制中通常以空间多点分布的传感器 的输出平方和作为衡量空间噪声的标准 . 使封闭 空间得到最大的降噪效果 , 就是使整个空间中多点 分布的传感器的输出平方和最小 . 因此 , 实际有源 噪声控制系统应采用多误差输出控制系统 . 研究表明: 发动机产生的低频周期噪声是机动
图 2 机动车辆室内主动噪声控制系 统
图 3 中 , a 是 x 22 ( n ) = co s( 6. 3 ×P× n) 无声学 路径误差时的系统输出曲线; b 是 x 22( n ) = cos ( 6. 3 ×P × n ) 有声学路径误差时的系统输出曲线; c 是 x 22 ( n ) = cos( 6. 3 × P×n + 3 × P / 5) 有声学路径误 差时的系统输出曲线 ; d 是 x 22( n ) = co s( 6. 303× P × n) 有声学路径误差时的系统输出曲线 .
T
6 6 R {F
r= 1 h = 1RH来自( 10) ( 11)
rh
x r h ( n ) w rh }
( 1)
( 2)
其中: C ûe( n ) û≥ C ( 12) ûe( n ) ûûe ( n) û< C C 为常数 , 且 C ≥1, ûe ( n ) û的引入 , 就构成了归一 ûe( n ) û= 化变步长 FXLM S 算法 .
H F H rh F rh ≈t race{ F rh F rh } I
图 1 多通道前馈主动噪声控制系统的数学模型
图中, L ×1 维实向量 e( n) 表示在 L 个扬声器 处的噪声信号 ; L × 1 维实向量 d ( n ) 表示在 L 个扬 声器处由发动机产生的噪声信号 , 复变量 x rh 表示 第 r 个参考信号的 h 次谐波; L ×1 维复向量 w rh 表 示第 r 个参考信号的第 h 次谐波驱动 L 个扬声器 时的权值; M ×L 维复矩阵 F rh 表示对第 r 个参考 信号的第 h 次谐波而言, L 个扬声器和 M 个麦克 风之间的声学路径 , R { ・} 表示取实部运算 .
信阳师范学院学报 ( 自然科学版 ) 第 14 卷 第 3 期 2001 年 7 月
Jour nal o f Xiny ang T eacher s Co lleg e ( N atural Science Edit ion) Vo l. 14 N o. 3 Jul. 2001
・应用技术研究・
多参考输入多误差输出 F XL M S 算法 及其在机动车辆室内噪声抵消中的应用
H H
多输出 F XL M S 算法的递推表达式为 :
按下式选取 : M= = L0 I t race{ R } L0
6 6
R
R
I
H rh
( 7)
Q rh tr ace{ F F r h}
r = 1 h= 1
这里: R = E { X H ( n) F H FX ( n ) } , 为参考输入相关 阵 ; 0< L0< 1, Q r h= E { û x rh ( n) û2 } , I 是单位矩阵 . 实际应用中 , 参考信号不相关时 , 相关矩阵 R 是块对角占优阵 , 则有 :
这里 I 为 L × L 维单位矩阵 , 定义向量 w1 W = , F = [ F 11 F 12 … F RH ] … w RH 这样, ( 1) 式中误差向量 e( n ) 可表示: e ( n) = d ( n) + { F X ( n) W } R ( 4) w 12
d 5 F H H = X ( n ) F e( n ) ( 5) 5w * 由 Widrow —— Hof f L M S 算法可推得多输入 W ( n + 1) = W ( n ) - 2MX ( n) F e( n ) ( 6) 这里: M 是 LRH ×L RH 维的步长因子矩阵 . 众所周知在 L MS 算法中 , 步长因子矩阵 M 应