二阶导数的中心差商
泰勒公式及其应用

泰勒公式及其应用许文锋华南师范大学数学科学学院信息与计算科学专业 2007级6班指导老师:谢骊玲中文摘要文章简要介绍了泰勒公式的证明及其推导过程,详细讨论了泰勒公式在高等数学、数值分析、数值最优化理论、其他非数学领域等应用,其中包括利用泰勒公式求近似值、证明积分、不等式、求行列式等高等数学问题;在数值分析问题上面主要讨论了泰勒公式在数值微积分及微分方程数值解上的应用;在最优化问题上面,分别讨论了泰勒公式在理论证明和算法设计上面的应用.关键词:泰勒公式,高等数学,数值分析,数值最优化,应用Taylor Formula and its ApplicationXu WenFeng(Grade 07,Class 6, Major in Information and Computing Science,School ofMathematics,South China Normal University)Tutor:Xie LiLingAbstractThis paper briefly introduces the proof of Taylor and its derivation. And we discuss the application of Taylor formula in detail in some fields such as advanced mathematics, numerical analysis, numerical optimization theory and other applications in some non—mathematical fields ,including using Taylor formula to solve some advanced mathematical problems such as approximation, proof of integral, inequality, solution of determinant etc. In numerical analysis we mainly discuss the applications of Taylor formula in numerical differentiation and numerical integration.As for numerical optimization ,we discuss the applications of Taylor formula in theoretical proof and algorithm design.Keyword : Taylor formula, advanced mathematics, numerical analysis, numerical optimization, applications一、前言对于某些函数,如果我们要求其在某一点上的值,有时是无法通过直接计算得到的.在学习了导数和微分概念时我们已经知道,如果函数f在0x 点可导,则)())(()()(0000x x x x x f x f x f -+-'+=ο,即在点x 附近,用一次多项式))(()(000x x x f x f -'+逼近函数)(x f 时,其误差为)(0x x-的高阶无穷小.然而在通常的场合中,取一次的多项式逼近是不够的,往往需要用二次或高于二次的多项式去逼近,因此我们提出了用一个多项式去逼近一个函数,泰勒公式就是满足上述逼近性质的多项式.泰勒公式尤其在一些近似计算和数值方法上发挥着举足轻重的作用.本文分为三部分,第一部分是给出了本文所需要用的定理和推论;第二部分是一元泰勒公式的推导和证明以及多元泰勒公式的介绍;第三部分是通过多个实例介绍泰勒公式的应用,包括在高等数学和数值计算方面的应用。
偏导数计算公式二阶

偏导数计算公式二阶偏导数是多元函数微积分中的重要概念,它描述了函数在某一点沿着某个方向的变化率。
在实际问题中,我们常常需要计算函数的二阶偏导数,以了解函数的曲率和凹凸性质。
本文将介绍如何使用偏导数计算公式来计算函数的二阶偏导数。
一、一阶偏导数的定义。
首先,我们来回顾一下一阶偏导数的定义。
对于一个二元函数f(x, y),它的偏导数可以分别表示为∂f/∂x和∂f/∂y。
其中,∂f/∂x表示在点(x, y)处,沿着x轴方向的变化率;∂f/∂y表示在点(x, y)处,沿着y轴方向的变化率。
偏导数的计算公式如下:∂f/∂x = lim(Δx→0) [f(x+Δx, y) f(x, y)] / Δx。
∂f/∂y = lim(Δy→0) [f(x, y+Δy) f(x, y)] / Δy。
其中,Δx和Δy分别表示x和y的增量。
通过这些公式,我们可以计算出函数在某一点处的偏导数值。
二、二阶偏导数的定义。
接下来,我们将介绍二阶偏导数的定义。
二阶偏导数描述了函数的曲率和凹凸性质,它可以帮助我们更全面地了解函数的性质。
对于二元函数f(x, y),它的二阶偏导数可以表示为∂²f/∂x²、∂²f/∂y²和∂²f/∂x∂y。
其中,∂²f/∂x²表示在点(x, y)处,沿着x轴方向的曲率;∂²f/∂y²表示在点(x, y)处,沿着y轴方向的曲率;∂²f/∂x∂y表示在点(x, y)处,沿着x和y方向的交叉变化率。
二阶偏导数的计算公式如下:∂²f/∂x² = ∂/∂x (∂f/∂x)。
∂²f/∂y² = ∂/∂y (∂f/∂y)。
∂²f/∂x∂y = ∂/∂x (∂f/∂y)。
通过这些公式,我们可以计算出函数在某一点处的二阶偏导数值。
二阶偏导数的计算过程比较复杂,需要通过对一阶偏导数的连续求导来实现。
有限差分法
有 限 差 分 法流体运动的控制方程多为偏微分方程,在复杂的情况下不存在解析解。
但是对于一些简单的情况存在解析解,偏微分方程的解析解可用精确的数学表达式表示,该表达式给出了因变量在整个定义域中的连续变化状况。
有限差分法(Finite Difference Method ,FDM )是数值计算中比较经典的方法,由于其计算格式直观且计算简便,因此被广泛地应用在计算流体力学中。
有限差分法首先将求解区域划分为差分网格,变量信息存储在网格节点上,然后将偏微分方程的导数用差商代替,代入微分方程的边界条件,推导出关于网格节点变量的代数方程组,通过求解代数方程组,获得偏微分方程的近似解。
偏微分方程被包含离散点未知量的代数方程所替代,这个代数方程能求出离散节点处的变量,这种离散方法叫做有限差分法。
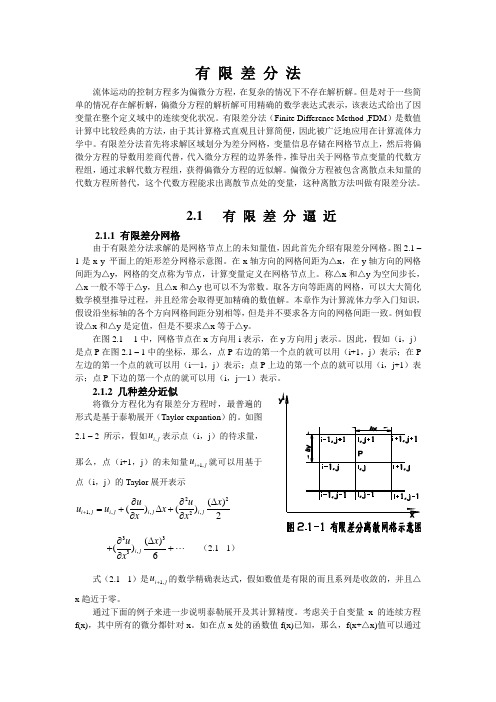
2.1有 限 差 分 逼 近2.1.1 有限差分网格 由于有限差分法求解的是网格节点上的未知量值,因此首先介绍有限差分网格。
图2.1 – 1是x-y 平面上的矩形差分网格示意图。
在x 轴方向的网格间距为△x ,在y 轴方向的网格间距为△y ,网格的交点称为节点,计算变量定义在网格节点上。
称△x 和△y 为空间步长,△x 一般不等于△y ,且△x 和△y 也可以不为常数。
取各方向等距离的网格,可以大大简化数学模型推导过程,并且经常会取得更加精确的数值解。
本章作为计算流体力学入门知识,假设沿坐标轴的各个方向网格间距分别相等,但是并不要求各方向的网格间距一致。
例如假设△x 和△y 是定值,但是不要求△x 等于△y 。
在图2.1 - 1中,网格节点在x 方向用i 表示,在y 方向用j 表示。
因此,假如(i ,j )是点P 在图2.1 – 1中的坐标,那么,点P 右边的第一个点的就可以用(i+1,j )表示;在P 左边的第一个点的就可以用(i —1,j )表示;点P 上边的第一个点的就可以用(i ,j+1)表示;点P 下边的第一个点的就可以用(i ,j —1)表示。
二阶及高阶导数的概念及计算

例4.22求函数f(x)=ln(1+x)在x=0点的泰勒展开式
1 1 解:∵f'(x)= ,f"(x)=, 2 (1 + x) 1+ x 6 2 (4)(x)=f"'(x)= 4 ,… 3 ,f (1 + x) (1 + x)
π
例4.25
lim 2 求极限 x → +∞
− arctgx 1 x
0 解:当x→∞时原式是 0
型的不定式,用罗必塔法则有
1 − − arctgx 2 x2 lim 2 = lim 1 + x = lim =1 2 x → +∞ x → +∞ x → +∞ 1 + x 1 1 − 2 x x
π
2. 不定式 [定理4.10] 如果当x→a时函数f(x)、g(x)都趋向于无穷大,在点 a的某一邻域内(点a除外),f'(x)、g'(x)均存在,g'(x)≠0
π 3π π 3π
当x∈( 内是凹的,
2 2
,
)时,f”(x)>0,曲线在(
2 2
,
)
3π 3π 当x∈( ,2π)时,f”(x)<0,曲线在( ,2π) 2 2
内为凸的。
2. 曲线的拐点 曲线上凸部和凹部的分界点叫做拐点。 因此拐点一定是使f"(x)=0的点,但是使f"(x)=0 的点不一定都是拐点。 [求拐点的一般步骤] ⑴ 求二阶导数f"(x); ⑵ 求出f"(x)=0的全部实根; ⑶ 对于每一个实根x0,检查f”(x)在x0左右两侧的 符号,如果x0两侧f"(x)的符号不同,则点(x0,f(x0)) 是曲线的拐点;如果x0两侧f”(x)的符号相同,则点 (x0,f(x0))不是曲线的拐点。
数值分析-第七章第一部分 (1)讲解

b
a
l2 ( x )dx
a
b
a
f ( x )dx L2 ( x )dx
a
b
b
a
ba ab [ f (a ) 4 f ( ) f (b)] 6 2 ba ab f ( x )dx f (a ) 4 f ( ) f (b) 6 2
向后差商公式
f ( x )
向前差商公式
xh
f ( x h) f ( x h) f ( x ) 中心差商公式 3 2h
x
x h ( h 0)
差商型求导公式的截断误差:
h f ( x h) f ( x ) 向前:f ( x ) O( h) f ( ) 2 h f ( x ) f ( x h) h 向后 : f ( x ) O( h) f ( ) 2 h 2 f ( x h) f ( x h ) h 2 中心 : f ( x ) O( h ) f ( ) 2h 6
f (4) ( )
h2 h3 h4 (4) f ( x h) f ( x ) hf ( x ) f ( x ) f ( x ) f (1 ) 2! 3! 4!
h2 h3 h4 (4) f ( x h) f ( x ) hf ( x ) f ( x ) f ( x ) f (2 ) 2! 3! 4!
h为相邻节点的距离
f(x)
L(x)
x a0
h
ax 1b 2
h
x2 b
x
21
3 Simpson ' s 公式 : 8
x3 x0
f ( x )dx
数值分析(20)数值微分
k0
lk
(x)
(x x0 ) ( xk x0 )
( x xk1 )( x xk1 ) ( xk xk1 )( xk xk1 )
(x xn ) (xk xn )
称为n+1点求导公式。
数值分析
数值分析
常用的数值微分公式是 n = 1 ,2 的插值型微分公式.
当n=4时,可得到5点公式:
中点求导公式:
f ( x0 )
f ( x0 2h) 8 f ( x0 h) 8 f ( x0 h) 12h
f ( x0 2h)
h4
f (5) (
)
30
(6),
x0 2h x0 2h,
h0
数值分析
数值分析
端点求导公式:
(4)
设
f ( x0 h) f ( x0 h) e( x0 h)
f ( x0 h) f ( x0 h) e( x0 h)
则(4)式为
f ( x0 )
f ( x0
h)
f ( x0
h)
e( x0
h) e( x0
h)
2h
2h
h2 6
(2)对f ( x)在点xi以h为增量作Taylor展开有
f ( xi
h)
f (xi )
f
'( xi )h
1 2
f
''( xi )h2
1 3!
f(3)( xi )h3
O(h4 )
f ( xi
h)
f (xi )
f
1 '( xi )h 2
5-结构动力学(有限元计算)解读

结构运动方程
结构运动方程是描述外部动力作用与结构体 系动力变形关系的数学物理方程,又称动力平衡 方程。运动方程可就不同角度分类,例如,离散 体系运动方程和连续体系运动方程,单自由度体 系运动方程和多自由度体系运动方程,弹性体系 运动方程和非线性体系运动方程,时域运动方程 和频域运动方程等。运动方程有时域波动方程、 差分方程、一阶微分方程、二阶微分方程、积分 方程和频域方程等不同的数学表述方式。
大,且积分方程求解困难,故一般不采用式(3.2.4)进行实际振动分析。
频域运动方程
时域运动方程经傅立叶变换可得频域运动方程。多自由 度弹性体系在地震作用下的频域运动方程为:
U () Hdd ()Ug ()
3.2.5
式中: U ( ) 为频域的地震反应矢量; H dd ( ) 为系统传递函 数矩阵; Ug () 为频域中的地震动输入矢量。运动方程(5) 为复数代数方程组,体系的频域反应经傅立叶反变换可得时 域反应。
置的空间坐标; k ( x, ) 为体系的位移影响系数,即作用于 处的单位力在 x 处
m( ) 为杆的单位长度质量; 引起的位移;p( , t ) 为随位置和时间变化的外荷载;
为杆的长度; e 为自然对数的底, i 1 , 为复阻尼系数。 具有积分微分方程形式的运动方程概念清晰,但位移影响系数的计算量
因为 u 不等于零,故可得与式 3.2.1.1-4 相同的方程。
哈密尔顿原理
哈密尔顿积分变分原理可表示为
t2
t1
δ(T V )dt δWnc dt 0
t1
t2
3.2.1.3-1
式中: 包括应变能及任何保守外力 (如 T 为体系的总动能; V 为体系的位能, 重力)的势能; Wnc 为作用于体系的非保守力(包括阻尼力及任意外荷载) 所作的功;δ 为在指定时间区间内所取的变分。哈密尔顿原理表明在任何时 间区间 t1 ~ t 2 内,动能和位能的变分与非保守力所作的功的变分之和必须等 于零。应用此原理可直接导出任何给定体系的运动方程。 在虚功分析中, 尽管功本身是标量, 但被用来计算功的力和位移都是矢 量。利用哈密尔顿原理建立运动方程时,不直接使用惯性力和弹性力,而代 之以动能和位能的变分项,平衡关系只与纯粹的标量(能量)有关,这是此 法与虚位移原理方法的区别。
数值微分 计算方法
最简单直接的数值微分方法就是用差商代替微商.
根 据 导 数 定 义, 在 点xi处
f '(xi )
lim
h0
f ( xi
h) h
f ( xi )
lim f ( xi ) f ( xi h)
h0
h
lim
f ( xi
h) 2
f ( xi
h) 2
h0
h
当h充分小时, 可用差商来逼近导数
数值分析
误差 0.00339 0.00089 0.00039 0.00011 0.00011 0.00021 0.00106
数值分析
数值分析
三. 运用样条插值函数求数值微分
用三转角方程和三弯矩方程可以分别求出在节 点处函数f(x)的一阶导数和二阶导数的近似值.
fi' mi
(i 0,1,L ,n)
fi" Mi
h 2(1.8 h)2 0.0173010 0.0015605 0.0001545
数值分析
数值分析
当n=2时,有
f
( xi )
2 k0
f
( xk )l'k
(xi )
1 6
f
(3) (i
2
) (xi
k0
xk )
ki
f
(
x0
)
(
2xi x0
x1
x1 )(x0
x2 x2
)
f
(
x1
)
(
2xi x1 x0
a b
若取数值微分公式
f (x) L' (x) n
误差为:
f f (n1)
(n1)
Rn( x)
有限差分方法
n
Δt
(2-2)
空间导数用一阶中心差商近似代替,即
ζ in+1 − ζ in−1 ⎛ ∂ζ ⎞ ⎜ ⎟ ≈ 2Δx ⎝ ∂x ⎠ i
则在 ( xi , t n ) 点的对流方程就可近似地写作
(2-3)
ζ in +1 − ζ in
Δt
+α
ζ in+1 − ζ in−1
2Δx
(1-11)
当然,在某些情况下也可取向前或向后的二阶差商。
9
第一节 差分原理及逼近误差/差分原理 以上是一元函数的差分与差商。多元函数f(x,y,…)的差分与 差商也可以类推。 如一阶向前差商为
Δf f ( x + Δx , y , Λ ) − f ( x , y , Λ ) = , Δx Δx
Δf f ( x, y + Δy , Λ ) − f ( x, y , Λ ) = , Δy Δy ΛΛ
(1-6)
6
第一节 差分原理及逼近误差/差分原理 函数的差分与自变量的差分之比,即为函数对自变量的 差商。 一阶向前差商为 一阶向后差商为
f ( x + Δx) − f ( x) Δy = Δx Δx
(1-7)
f ( x ) − f ( x − Δx ) Δy = Δx Δx
(1-8)
7
第一节 差分原理及逼近误差/差分原理 一阶中心差商为
15
第一节 差分原理及逼近误差/非均匀步长
图1-2 均匀和非均匀网格实例1
16
第一节 差分原理及逼近误差/非均匀步长
图1-3 均匀和非均匀网格实例2
17
第二节 差分方程 差分相应于微分,差商相应于导数。差分和差商是用有限形 式表示的,而微分和导数则是以极限形式表示的。如果将微 分方程中的导数用相应的差商近似代替,就可得到有限形式 的差分方程。现以对流方程为例,列出对应的差分方程。
第九章偏微分方程差分方法汇总
第9章 偏微分方程的差分方法含有偏导数的微分方程称为偏微分方程。
由于变量的增多和区域的复杂性,求偏微分方程的精确解一般是不可能的,经常采用数值方法求方程的近似解。
偏微分方程的数值方法种类较多,最常用的方法是差分方法。
差分方法具有格式简单,程序易于实现,计算量小等优点,特别适合于规则区域上偏微分方程的近似求解。
本章将以一些典型的偏微分方程为例,介绍差分方法的基本原理和具体实现方法。
9.1椭圆型方程边值问题的差分方法9.1.1 差分方程的建立最典型的椭圆型方程是Poisson (泊松)方程G y x y x f yux u u ∈=∂∂+∂∂-≡∆-),(),,()(2222 (9.1)G 是x ,y 平面上的有界区域,其边界Γ为分段光滑的闭曲线。
当f (x ,y )≡0时,方程(9.1)称为Laplace(拉普拉斯)方程。
椭圆型方程的定解条件主要有如下三种边界条件第一边值条件 ),(y x u α=Γ (9.2) 第二边值条件),(y x nuβ=∂∂Γ (9.3) 第三边值条件 ),()(y x ku nuγ=+∂∂Γ (9.4) 这里,n 表示Γ上单位外法向,α(x,y ),β(x,y ),γ(x,y )和k (x,y )都是已知的函数,k (x,y )≥0。
满足方程(9.1)和上述三种边值条件之一的光滑函数u (x ,y )称为椭圆型方程边值问题的解。
用差分方法求解偏微分方程,就是要求出精确解u (x ,y )在区域G 的一些离散节点(x i ,y i )上的近似值u i ,j ≈(x i ,y i )。
差分方法的基本思想是,对求解区域G 做网格剖分,将偏微分方程在网格节点上离散化,导出精确解在网格节点上近似值所满足的差分方程,最终通过求解差分方程,通常为一个线性方程组,得到精确解在离散节点上的近似值。
设G ={0<x <a , 0<y <b }为矩形区域,在x ,y 平面上用两组平行直线x =ih 1, i =0,1,…,N 1, h 1=a /N 1 y =jh 2, j =0,1,…,N 2, h 2=b /N 2将G 剖分为网格区域,见图9-1。
数值模拟02 3.1.2 一阶差商和二阶差商
2!
3!
px x px xp'x x2 p''x x3 p'''x
2!
3!
两式相减:
p x x p x x 2xp' x x3 p''' x
3
9
三、一阶差商和二阶差商
1. 一阶差商
一阶中心差商
p px x px x pi1 pi1
x
2x
2x
p pi1 pi1 pi1/ 2 pi1/ 2
x 2x
x
T.E Ox2
12
三、一阶差商和二阶差商
1. 一阶差商
时间节点的一阶前差商:
dP dt
Pn1 t
Pn
对于实际的三维问题: p pi1, j,k pi, j,k
x i, j,k
x
p y
i,
j,k
pi, j1,k pi, j,k y
p
pi, j,k 1 pi, j,k
例如 pin, j 表示第(i,j)网格在第n时刻的压力值
4
三、一阶差商和二阶差商
1. 一阶差商 一阶前差商
px x px xp'x x2 p''x x3 p'''x
2!
3!
p px x px pi1 pi
x
x
x
T.E Ox
5
三、一阶差商和二阶差商
1. 一差商 一阶前差商
6
三、一阶差商和二阶差商
2. 二阶差商
① 等距离网格
p''x
px x 2 px
x2
px x O(x2 )
高三数学二次求导知识点

高三数学二次求导知识点简单来说,一阶导数是自变量的变化率,二阶导数就是一阶导数的变化率,也就是一阶导数变化率的变化率。
下面给大家带来一些关于高三数学二次求导知识点,希望对大家有所帮助。
●高三数学二次求导知识点一.二阶导数定义二阶导数,是原函数导数的导数,将原函数进行二次求导。
一般的,函数y=f(x)的导数yˊ=fˊ(x)仍然是x的函数,则y′′=f′′(x)的导数叫做函数y=f(x)的二阶导数。
在图形上,它主要表现函数的凹凸性。
几何意义1、切线斜率变化的速度,表示的是一阶导数的变化率。
2、函数的凹凸性(例如加速度的方向总是指向轨迹曲线凹的一侧)。
函数凹凸性设f(x)在[a,b]上连续,在(a,b)内具有一阶和二阶导数,那么,(1)若在(a,b)内f''(x)>0,则f(x)在[a,b]上的图形是凹的。
(2)若在(a,b)内f’‘(x)<0,则f(x)在[a,b]上的图形是凸的。
●高三数学二次求导知识点二.一阶导数与二阶导数简单来说,一阶导数是自变量的变化率,二阶导数就是一阶导数的变化率,也就是一阶导数变化率的变化率。
连续函数的一阶导数就是相应的切线斜率。
一阶导数大于0,则递增;一阶倒数小于0,则递减;一阶导数等于0,则不增不减。
而二阶导数可以反映图象的凹凸。
二阶导数大于0,图象为凹;二阶导数小于0,图象为凸;二阶导数等于0,不凹不凸。
结合一阶、二阶导数可以求函数的极值。
当一阶导数等于零,而二阶导数大于零时,为极小值点;当一阶导数等于零,而二阶导数小于零时,为极大值点;当一阶导数、二阶导数都等于零时,为驻点。
●高三数学二次求导知识点三.一次求导函数1.y=c(c为常数) y'=02.y=x^n y'=nx^(n-1)3.y=a^x y'=a^xlnay=e^x y'=e^x4.y=logax y'=logae/xy=lnx y'=1/x5.y=sinx y'=cosx6.y=cosx y'=-sinx7.y=tanx y'=1/cos^2x8.y=cotx y'=-1/sin^2x9.y=arcsinx y'=1/√1-x^210.y=arccosx y'=-1/√1-x^211.y=arctanx y'=1/1+x^212.y=arccotx y'=-1/1+x^2●高三数学二次求导知识点四.求导的意义1.导数的实质:导数是函数的局部性质。
具有中间变量的二阶导数公式
具有中间变量的二阶导数公式
我们要找出一个具有中间变量的二阶导数公式。
首先,我们需要理解什么是二阶导数。
二阶导数是一个函数关于其自变量的导数的导数。
例如,对于函数 f(x),其二阶导数是 f''(x) = d^2/dx^2 f(x)。
现在,我们假设有一个函数 g(x, y),其中 x 和 y 是中间变量。
我们要找出 g 关于 x 和 y 的二阶导数。
对于这样的函数,其二阶导数可以表示为:
g''(x, y) = ∂^2 g(x, y) / ∂x^2 + ∂^2 g(x, y) / ∂y^2
其中,∂^2 g(x, y) / ∂x^2 是 g 关于 x 的二阶导数,
∂^2 g(x, y) / ∂y^2 是 g 关于 y 的二阶导数。
这个公式告诉我们,要找到 g 的二阶导数,我们需要分别找到 g 关于 x 和y 的二阶导数,然后将它们相加。
总结:具有中间变量的二阶导数公式是:g''(x, y) = ∂^2 g(x, y) / ∂x^2 + ∂^2 g(x, y) / ∂y^2。
基于有限差分法的微分方程离散化求解

基于有限差分法的微分方程离散化求解【摘要】目前偏微分方程数值求解的方法主要有两种,即有限差分法和有限元方法。
本文论述了基于有限差分法的微分方程求解,离散化过程,并对结果进行了分析。
【关键词】有限差分法离散化数值模拟1.前言有限差分法是计算机数值模拟最早采用比较成熟的方法,该方法将求解域划分为差分网格,用有限个网格节点代替连续的求解域,是一种直接将微分问题变为代数问题的近似数值解法,数学概念直观,表述简单。
有限元方法的基础是变分原理和加权余量法,其基本求解思想是把计算域划分为有限个互不重叠的单元,在每个单元内必改写成由各变量或其导数的节点值与所选用的插值函数组成的线性表达式,借助于变分原理或加权余量法,将微分方程离散求解。
用有限差分法求解偏微分方程必须把连续问题进行离散化,为此首先要对求解区域进行离散化。
构造离散网格系统的目的在于将表现为非均系统的大尺度用若干可以近似为均匀系统的尺度(如网格)表征。
构造差分形式就是对参数在一定的离散点中心网格或块中心网格上离散。
其中,离散网格可以是空间离散网格,也可以是时间离散网格(即离散时间步长)。
平面网格的形式是多种多样的,如矩形网格、柱形网格、多边形网格等。
空间离散网格是和边界条件相关联的,一般来说,对于第一类边界条件采用点中心网格较方便,第二、三类边界条件采用块中心网格比较合适。
2.微分方程的离散化2.1一阶偏导数的差商逼近设有函数u(x,y,t),对其自变量x的偏导数可以表示成函数的差商的极限形式(1)在⑴式中,当自变量增量充分小时,如果能用比较简单的函数差商来代替偏导数,即(2)这样就可以把偏微分方程用差分方程代替,从而把难于求解的偏微分方程化成代数方程组。
利用Taylor级数可以说用(2)形式的差商来逼近一阶偏听偏信导数,其误差对Δx来说是一阶的。
式(2)是用前差商来代替一阶偏导数即(3)同理,后差商也可以用来代替一阶偏导数,且其误差也为ο(Δx)。