新代系统标准参数
新代系统行程限位参数

新代系统行程限位参数一、引言行程限位参数是指在新代系统中用于限制行程范围的参数。
在新代系统中,行程限位参数的设置非常重要,它直接影响到机械设备的正常运行和安全性能。
本文将从行程限位参数的定义、设置原则、优化方法等方面进行深入探讨。
二、行程限位参数的定义行程限位参数是指在机械设备中设置的用于限制行程范围的参数,主要是为了保护机械设备不超出安全范围。
行程限位参数通常包括最大行程限位和最小行程限位。
1. 最大行程限位最大行程限位是指机械设备在某一方向上的最大允许行程,一旦超过该行程,机械设备将停止运行或采取其他措施,以避免损坏设备或造成安全事故。
2. 最小行程限位最小行程限位是指机械设备在某一方向上的最小允许行程,一旦低于该行程,机械设备将停止运行或采取其他措施,以避免设备异常或安全隐患。
三、行程限位参数的设置原则行程限位参数的设置需要考虑多个方面的问题,下面是一些设置原则供参考:1. 安全优先行程限位参数首先要保证机械设备运行时的安全性。
因此,在设置行程限位参数时,应确保设备不会超出安全范围,避免发生意外事故。
2. 准确度行程限位参数的设置要具备一定的准确性,以保证设备在运行过程中不会误判行程范围。
准确度可以通过合理选择传感器和精确测量手段来实现。
3. 灵活性行程限位参数应具备一定的灵活性,以适应不同的工作条件和需求。
不同的工况和工作要求可能需要调整行程限位参数,因此,行程限位参数应具备可调节性。
4. 稳定性行程限位参数应具备良好的稳定性,以确保设备在长期运行过程中不会产生误判和漂移。
稳定性可以通过合理的传感器布置和校准来实现。
四、行程限位参数的优化方法行程限位参数的优化可以从以下几个方面入手,以提高设备的运行效率和安全性:1. 合理选择传感器传感器是行程限位参数的重要组成部分,合理选择传感器类型和品牌可以提高行程限位参数的准确度和稳定性。
2. 制定合理的参数范围根据设备的实际情况和工作要求,制定合理的行程限位参数范围。
新代系统参数

0
882
Y轴寻原点的偏移量(BLU)
0
883
Z轴寻原点的偏移量(BLU)
0
861/862/863/866(X/Y/Z/第六轴的寻原点方向为负方向,需要时可以修改此参数,一般为0
886
第六轴寻原点的偏移量(BLU)
0
941
启动X轴寻原点栅格功能(0关,1开)
0
942
启动Y轴寻原点栅格功能(0关,1开)
1
22
设定Y轴对应的伺服轴
2
23
设定Z轴对应的伺服轴
3
26
设定第六轴对应的伺服轴(W轴)
4
41
X轴运动方向反向(0或1)
0
42
X轴运动方向反向(0或1)
0
43
Z轴运动方向反向(0或1)
0
46
第六轴轴运动方向反向(0或1)
0
61
X轴解析度(一般为)
2500
62
Y轴解析度(一般为)
2500
63
Z轴解析度(一般为)
2500
66
第六轴解析度(一般为)
2500
131
第六轴螺杆侧齿数(看分度头标准)
90
161
X轴的螺距
162
Y轴的螺距
163
Z轴的螺距
166
第六轴的螺距(MM)
360
181
X轴伺服系统的回路增益(1/sห้องสมุดไป่ตู้c)
182
Y轴伺服系统的回路增益(1/sec)
183
Z轴伺服系统的回路增益(1/sec)
186
第六轴伺服系统的回路增益(1/sec)
5
新代系统SYNTEC:调试参数
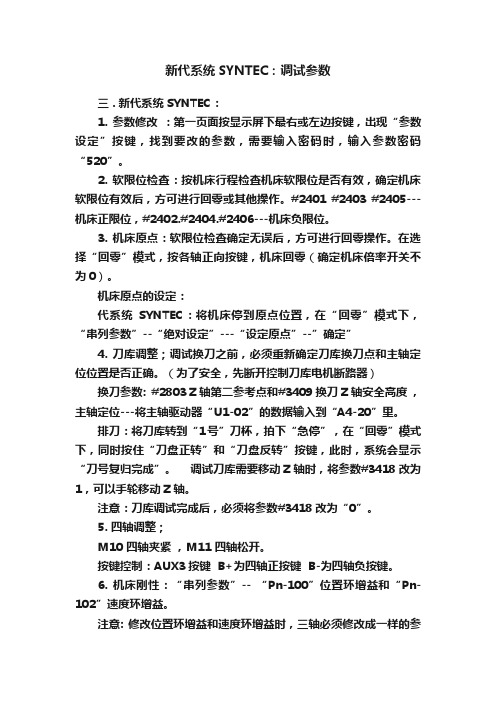
新代系统SYNTEC:调试参数三 . 新代系统SYNTEC:1. 参数修改:第一页面按显示屏下最右或左边按键,出现“参数设定”按键,找到要改的参数,需要输入密码时,输入参数密码“520”。
2. 软限位检查:按机床行程检查机床软限位是否有效,确定机床软限位有效后,方可进行回零或其他操作。
#2401 #2403 #2405---机床正限位,#2402.#2404.#2406---机床负限位。
3. 机床原点:软限位检查确定无误后,方可进行回零操作。
在选择“回零”模式,按各轴正向按键,机床回零(确定机床倍率开关不为0)。
机床原点的设定:代系统SYNTEC:将机床停到原点位置,在“回零”模式下,“串列参数”--“绝对设定”---“设定原点”--”确定”4. 刀库调整;调试换刀之前,必须重新确定刀库换刀点和主轴定位位置是否正确。
(为了安全,先断开控制刀库电机断路器)换刀参数: #2803 Z轴第二参考点和#3409 换刀Z轴安全高度,主轴定位---将主轴驱动器“U1-02”的数据输入到“A4-20”里。
排刀:将刀库转到“1号”刀杯,拍下“急停”,在“回零”模式下,同时按住“刀盘正转”和“刀盘反转”按键,此时,系统会显示“刀号复归完成”。
调试刀库需要移动Z轴时,将参数#3418改为1,可以手轮移动Z轴。
注意:刀库调试完成后,必须将参数#3418改为“0”。
5. 四轴调整;M10 四轴夹紧,M11 四轴松开。
按键控制:AUX3按键 B+为四轴正按键 B-为四轴负按键。
6. 机床刚性:“串列参数”-- “Pn-100”位置环增益和“Pn-102”速度环增益。
注意: 修改位置环增益和速度环增益时,三轴必须修改成一样的参数值,否者会影响机床精度。
7. 机床反向间隙:参数#1241-#12608. 气压和润滑油:参数#3417=0时为正常状态。
#3417=1 屏蔽气压报警,#3417=2屏蔽润滑油报警,#3417=3 同时屏蔽气压和润滑油报警。
新代参数设定参考手册

新代参数设定参考手册(总87页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除新代科技參數設定說明手冊by : 新代科技date :2006/11/20ver : 9.5版本更新記錄目錄1.參數總表 (7)2.參數設定說明 (36)2.1 系統基本參數設定 (36)2.1.1 硬體環境設定 (36)2.1.1.1 軸卡基本參數設定 (36)2.1.1.1.1Pr01 軸板基址 (36)2.1.1.1.2Pr09 軸板型態 (37)2.1.1.1.3 Pr10 伺服警報接點型態 (37)2.1.1.1.4Pr11 軸卡時脈來源 (38)2.1.1.1.5Pr12 SERVO6 軸卡最高時脈 (38)2.1.1.1.6Pr13 軸卡數目 (38)2.1.1.2 I/O 卡基本參數設定 (39)2.1.1.2.1Pr03 I/O 板基址 (39)2.1.1.2.2Pr05 I/O 板組態 (39)2.1.1.2.3Pr15 I/O 卡數位濾波程度 (42)2.1.1.3 控制精度設定 (43)2.1.1.3.1 Pr17 控制精度 (43)2.1.1.4 螢幕功能鍵型態設定 (43)2.1.1.4.1 Pr3205 功能鍵型態 (43)2.1.1.5 螢幕型別 (44)1 Pr3211 螢幕型別 (44)2.1.1.6 預設外部存取資料磁碟機代號 (44)1 Pr3213 磁碟機代號 (44)2.1.1.7 選擇控制面板鍵盤型態 (44)1 Pr3217 選擇控制面板鍵盤型別 (44)2.1.1.8 系統掃瞄時間設定 (45)1 Pr3202 I/O 掃描時間 (45)2 Pr3203 運動補間時間 (45)3 Pr3204 PLC 掃描時間 (45)2.1.2 軟體介面環境參數設定 (46)2.1.2.1 應用功能參數設定 (46)1 Pr411 G00 運動方式 (46)2 Pr413 G92(G92.1)座標保留模式設定 (46)2.1.2.1.3 Pr414 工件座標系統保留模式 (46)4 Pr415 重置或關機時保留目前刀長資料 (47)5 Pr3207 C/S 界面版本編號 (47)6 Pr3215 選刀時呼叫副程式 (47)7 Pr3241 工件程式小數點型態 (47)8 Pr3243 鍵盤重置鍵由 PLC 處理 (48)9 Pr3245 刀長磨耗補償輸入增量最大值 (48)0 Pr3801 G95 時進給量與主軸位置緊密偶合 (48)Pr3807 圓弧終點不在圓弧上檢查視窗 (49)2.1.2.1.12 Pr3809 UVW 為 XYZ 軸增量指令 (49)2.1.2.1.13 Pr3815 刀具半徑補償預看模式 (49)2.1.2.1.14 Pr3816 刀長補償模式 (49)5 Pr3819 過切檢查型態 (50)Pr3851 斷刀處理程式號碼 (50)2.1.2.2 系統人機介面設定 (51)1 Pr3201 設定啟動車床規則 (51)2 Pr3209 語言設定 (51)3 Pr3219 系統安裝組態 (52)4 Pr3221 除錯模式 (52)5 Pr3223 啟動系統管理功能 (53)6 Pr3225 螢幕保護功能延遲時間 (53)7 Pr3227 螢幕解析度 (53)2.1.2.2.8 Pr3229 關閉工件座標系統功能 (53)9 Pr3247 速率顯示方法 (54)2.2.伺服軸向參數設定 (55)2.2.1 各軸對應機械軸設定 (55)2.2.1.1 Pr21~Pr40 伺服對應的機械軸 (55)2.2.2 軸向馬達運動方向的設定 (55)2.2.2.1 Pr41~Pr60 馬達運動方向設定 (55)2.2.3 軸向命令與回授解析度設定 (56)2.2.3.1 Pr61~Pr80 位置感測器解析度 (56)Pr81~Pr100 軸卡回授倍頻 (56)Pr121~Pr160 螺桿側齒輪齒數,馬達側齒輪齒數 (56)Pr161~Pr180 螺桿寬度(Pitch) (56)Pr181~Pr200 伺服系統的位置迴路增益 (56)Pr201~Pr220 位置感測器型態 (56)Pr341~Pr360 位置命令倍率分子 (56)Pr361~Pr380 位置命令倍率分母 (56)2.2.4 各軸向應用型態設定 (58)2.2.4.1 Pr221~Pr226 軸型態 (58)2.2.4.2 Pr281~Pr300 選擇半徑軸或直徑軸 (59)2.2.5 各軸向顯示名稱設定 (59)2.2.5.1 P r321~Pr340 設定軸的名稱 (59)2.2.6 軸向控制模式設定 (60)2.2.6.1 Pr381~Pr400 位置伺服控制模式 (60)2.2.7 定位檢查功能設定 (60)2.2.7.1 Pr421~Pr440 切削時位置檢查的視窗範圍 (60)2.2.7.2 Pr481~Pr500 快速移動(Rapid T ravel, G00)時位置檢查的視窗範圍 (61)2.2.7.3 Pr561~Pr580 遺失位置檢查視窗 (61)2.2.7.4 Pr901~Pr920 零速檢查視窗 (61)2.2.8 各軸向左右軟體行程極限保護 (61)2.2.8.1 Pr2401~Pr2440 軟體第一行程保護的範圍 (61)2.2.8.2 Pr2441~Pr2480 軟體第二行程保護的範圍 (62)2.3.主軸參數設定 (63)2.3.1 主軸對應命令輸出埠設定 (63)2.3.1.1 Pr1621~Pr1630 主軸對應的機械軸或邏輯軸 (63)2.3.2 主軸命令參數設定 (63)2.3.2.1 Pr.1631~Pr.1636 主軸零速offset 速度 (63)2.3.2.2 Pr.1641~Pr.1646 主軸編碼器極性 (63)2.3.2.3 Pr.1651~Pr.1656 主軸馬達編碼器一轉的Pulse 數 (63)2.3.2.4 Pr.1661~Pr.1666 主軸回授倍頻 (64)2.3.2.5 Pr.1671~Pr.1676 主軸馬達增益 (64)2.3.2.6 Pr.1681~Pr.1692 主軸第一檔齒數比 (64)Pr.1901~Pr.1952 主軸第四檔齒數比 (64)2.3.2.7 P r.1711~Pr.1716 主軸是否安裝編碼器 (65)2.3.3 主軸運動轉速設定參數 (65)2.3.3.1 Pr.1721~Pr.1726 主軸寸動速度 (65)2.3.3.2 Pr.1731~Pr.1736 主軸最低轉速 (65)2.3.3.3 Pr.1801~Pr.1806 主軸最高轉速 (65)2.3.3.4 Pr.1821~Pr.1826 主軸伺服微分增益 (65)2.3.3.5 Pr.1831~Pr.1836 主軸加減速時間 (66)2.3.3.6 Pr.1851~Pr.1856 主軸重力加速度加減速時間 (66)2.3.4 主軸定位設定參數 (66)2.3.4.1 Pr.1741~Pr.1746 主軸定位速度 (66)2.3.4.2 Pr.1741~Pr.1746 主軸定位偏移量 (66)2.3.4.3 Pr.1771~Pr.1776 主軸原點偏移量 (66)2.3.4.4 Pr.1781~Pr.1786 主軸定位最低速度 (67)2.3.4.5 Pr.1791~Pr.1796 主軸馬達型態 (67)2.3.4.6 P r.1811~Pr.1816 主軸編碼器安裝位置 (67)2.3.4.7 Pr.1841~Pr.1846 主軸Y-Delta 切換速度 (67)2.4.軸向運動特性設定參數 (69)2.4.1 切削時前加減速運動規劃 (69)2.4.1.1 Pr401 切削加減速時間 (69)Pr402 重力加速度加減速時間 (69)Pr405 切削的最高進給速度 (69)Pr541~Pr560 各軸切削的加減速時間 (69)Pr621~Pr640 各軸切削的最高進給速度 (69)Pr641~Pr660 各軸重力加速度加減速時間 (69)2.4.2 切削時後加減速運動規劃 (71)2.4.2.1 Pr404 後加減速切削鐘型加減速時間 (71)2.4.3 切削時直線轉角自動減速功能 (73)2.4.3.1 P r406 轉角參考速度 (73)2.4.4 切削時圓弧切削運動最高進給速度設定 (74)2.4.4.1 Pr408 半徑5mm 圓弧切削參考速度 (74)2.4.5 快速移動及 JOG 時的加減速規劃 (75)2.4.5.1 Pr441~Pr460 各軸快速移動(G00)的加減速時間 (75)Pr461~Pr480 各軸快速移動(G00)的最高進給速度 (75)Pr501~Pr520 各軸快速移動(G00)的F0 速度 (75)Pr521~Pr540 各軸JOG 速度 (75)2.5.尋原點動作設定參數 (76)2.5.1 尋原點方式設定參數 (76)2.5.1.1 Pr961~Pr980 各軸尋原點方法 (76)2.5.2 尋原點動作規格與參數設定 (76)2.5.2.1 Pr821~Pr840 各軸第一段尋原點速度 (76)Pr841~Pr860 各軸第二段尋原點速度 (76)Pr861~Pr880 各軸尋原點為負方向 (76)2.5.3 原點偏移功能設定參數 (77)2.5.3.1 Pr881~Pr900 原點的偏移量設定 (77)2.5.4 原點柵格量功能設定參數 (78)2.5.4.1 Pr941~Pr960 啟動尋原點柵格功能 (78)2.6.手輪功能設定參數 (80)2.6.1 手輪訊號輸入設定參數 (80)2.6.1.1 Pr2031~Pr2034 手輪對應的機械軸 (80)2.6.2 手輪訊號解析度設定參數 (80)2.6.2.1 Pr2041~Pr2044 手輪Encoder 一轉的Pulse 數 (80)Pr2051~Pr2054 手輪回授倍頻 (80)2.6.3 手輪段數設定參數 (80)2.6.3.1 Pr2001 手輪第四段倍率設定 (80)2.6.4 手輪模擬功能設定參數 (81)2.6.4.1 Pr2003 手輪模擬對應手輪號碼 (81)2.6.5 手輪驅動軸向功能設定參數 (81)2.6.5.1 Pr2031~Pr2033 手輪對應的座標軸 (81)2.6.5 手輪設定參數 (81)2.6.5.1 Pr2031~Pr2033 手輪對應的座標軸 (81)2.7.機構補償功能設定參數 (82)2.7.1 尖角誤差補償設定參數 (82)2.7.1.1 Pr1361~Pr1380 圓弧尖角正向誤差補償量 (82)Pr1381~Pr1400 圓弧尖角誤差補償時間常數 (82)Pr1361~Pr1400 圓弧尖角負向誤差補償量 (82)2.8.軸耦合功能設定參數 (85)2.8.1 軸耦合功能設定參數 (85)2.8.1.1 Pr1361~Pr1380 圓弧尖角正向誤差補償量 (85)Pr1381~Pr1400 圓弧尖角誤差補償時間常數 (85)Pr1361~Pr1400 圓弧尖角負向誤差補償量 (85)1.參數總表2.參數設定說明2.1 系統基本參數設定2.1.1 硬體環境設定軸卡基本參數設定2.1.1.1.1 Pr01 軸板基址1.Servo_4 軸卡對應 I/O 基址與跳線規則:軸卡二片以下 Pr01今800 軸卡超過二片 Pr01今7682.S ervo_6 的第一片軸卡基址為768(目前一部控制器僅支援一張 Servo_6,不可與 Servo_4 混插)3.E mbedded 第一片軸卡基址固定為5122.1.1.1.2 Pr09 軸板型態0:EMP21:SVO4+不檢查伺服警報2:SVO4+伺服警報接點為常開接點 Normal Open( A 接點)3:SVO4+伺服警報接點為常閉接點 Normal Close( B 接點)4:EMP45:SERVO69:虛擬軸卡2.1.1.1.3 Pr10 伺服警報接點型態0: SERVO 6 軸卡警報為常開接點 Normal Open( A 接點)1: SERVO 6 軸卡警報為常閉接點 Normal Close( B 接點)2.1.1.1.4 Pr11 軸卡時脈來源此參數為設定軸卡時脈來源:設定 0 為使用軸卡自已時脈設定 1 為共用控制器底板 IPC Bus 時脈設定 2 為共用主機板 VIA 時脈設定原則:一體機控制器今請設定『0』非一體機控制器今請設定『2』舊型 486 主機板控制器今請設定『1』2.1.1.1.5 Pr12 SERVO6 軸卡最高時脈此參數為設定 Servo6 軸版最高時脈。
新代系统参数

参数
说明
值
参数
说明
值
1
设定第一轴轴板基址:四槽机800,一体机512
3
设定第一轴IO板基址
512
5
IO板组态
7
9
轴板型态(3为四轴加常闭接点)
3
10
伺服警报接点(0常开,1常闭)
1
11
轴板时脉来源(0一体机,2四槽机)
0
18
高速高精允许最大弦误差(默认值)
15
21
设定X轴对应的伺服轴
1
3207
C/S界面版本编号(1百分比2段数)
2
3209
Language(0英1繁2方言3简体)
3
3213
磁碟机代号
3
3215
选刀时呼叫模式(0一般1副程2巨集)带刀库的机床必须选1或2
0
3217
键盘型态(0四槽机1分离式一体机4面板式一体机
3219
系统安装组态(3CFCAR)
3
3223
启动系统管理功能(0关1开)
5
326
第六轴轴名称(W轴时)
900
366
第六轴命令倍率分母(CTB12000转用)
2
381
X轴位置伺服方式(0CW,2AB)
0
382
Y轴位置伺服方式(0CW,2AB)
0
383
Z轴位置伺服方式(0CW,2AB)
0
386
第六轴位置伺服方式设0(0CW,2AB)CTB设2
401
切削时的加减速时间(ms)
1
22
设定Y轴对应的伺服轴
2
23
设定Z轴对应的伺服轴
新代系统参数

541/542/543/546/XYZ第六轴切削加速时间(ms)
621/622/623/626/XYZ第六轴切削时的最高速度(mm/min)
641/642/643/646/XYZ第六轴加速到加速度1G所需的时间
821
X轴寻原点速度(mm/min)
刀臂:Z轴换刀点(与2803一致)
3411
刀臂:X轴换刀点(与2801一致)
3412
MLC暂存器92,刀臂:设1警报开关打开
3413
刀臂:刀臂寸动(0关,4开启)
3414
刀臂:第四轴回原点功能:0关,1开启
3415
刀臂:第四轴功能:0关,1开启
3416
刀臂:主轴夹刀确认时间0.2s
3417
刀臂:主轴放刀确认时间0.2s
1
22
设定Y轴对应的伺服轴
2
23
设定Z轴对应的伺服轴
3
26
设定第六轴对应的伺服轴(W轴)
4
41
X轴运动方向反向(0或1)
0
42
X轴运动方向反向(0或1)
0
43
Z轴运动方向反向(0或1)
0
46
第六轴轴运动方向反向(0或1)
0
61
X轴解析度(一般为)
2500
62
Y轴解析度(一般为)
2500
63
Z轴解析度(一般为)
1302
启动Y轴齿节误差补偿(0无1单2双)
0
1303
启动Z轴齿节误差补偿(0无1单2双)
0
1306
启动六轴齿节误差补偿(0无1单2双)
0
1321
新代系统标准参数

新代系统标准参数(供参考)Model: 900ME Version: 10.69Modification Date: 2006/09/24 Time: 15:08:16 Model: 900ME Version: 10.69Modification Date: 2006/09/24 Time: 15:08:16No Value Title1 800 *设定第一轴轴板基址3 512 *设定第一轴IO板基址5 7 *IO板组态(0:EIO;1:H+3R1;2:H+R2+2R1;3:2R2+4R1)9 3 *轴板型态(0:E2;1:S4;2:S4+A;3:S4+B;4:E4;5:S6)10 0 *伺服警报接点型态(0:A;1:B;S6卡)11 2 *轴板时脉来源(0:轴板;1:Bus;2:VIA)12 400 *Servo6轴板最高时脉(Kpps)13 1 *设定轴板数目15 3 I/O板数位滤波程度17 2 *设定控制精度,BLU(1:条;2:微米;3:次微米)21 1 *设定X 轴对应的伺服轴22 2 *设定Y 轴对应的伺服轴23 3 *设定Z 轴对应的伺服轴24 0 *设定第四轴对应的伺服轴25 0 *设定第五轴对应的伺服轴26 0 *设定第六轴对应的伺服轴41 1 X 轴运动方向反向(0:正 1:反)42 0 Y 轴运动方向反向(0:正 1:反)43 1 Z 轴运动方向反向(0:正 1:反)44 0 第四轴运动方向反向45 0 第五轴运动方向反向46 0 第六轴运动方向反向61 4000 X 轴感应器解析度(编:次/转;光:次/mm)62 4000 Y 轴感应器解析度(编:次/转;光:次/mm)63 4000 Z 轴感应器解析度(编:次/转;光:次/mm)64 2500 第四轴感应器解析度(编:次/转;光:次/mm)65 2500 第五轴感应器解析度(编:次/转;光:次/mm)66 2500 第六轴感应器解析度(编:次/转;光:次/mm)81 4 X 轴的回授倍频82 4 Y 轴的回授倍频83 4 Z 轴的回授倍频84 4 第四轴的回授倍频85 4 第五轴的回授倍频86 4 第六轴的回授倍频101 200 X 轴马达的增益(RPM/V)102 200 Y 轴马达的增益(RPM/V)103 200 Z 轴马达的增益(RPM/V)104 200 第四轴马达的增益(RPM/V)105 200 第五轴马达的增益(RPM/V)106 200 第六轴马达的增益(RPM/V)121 1 X 轴螺杆侧齿数122 1 X 轴马达侧齿数123 1 Y 轴螺杆侧齿数124 1 Y 轴马达侧齿数125 1 Z 轴螺杆侧齿数126 1 Z 轴马达侧齿数127 1 第四轴螺杆侧齿数128 1 第四轴马达侧齿数129 1 第五轴螺杆侧齿数130 1 第五轴马达侧齿数131 1 第六轴螺杆侧齿数132 1 第六轴马达侧齿数161 10000 X 轴的PITCH(BLU)162 10000 Y 轴的PITCH(BLU)163 10000 Z 轴的PITCH(BLU)164 5000 第四轴的PITCH(BLU)165 5000 第五轴的PITCH(BLU)166 5000 第六轴的PITCH(BLU)181 120 X 轴伺服系统的回路增益(1/sec)182 120 Y 轴伺服系统的回路增益(1/sec)183 120 Z 轴伺服系统的回路增益(1/sec)184 30 第四轴伺服系统的回路增益(1/sec) 185 30 第五轴伺服系统的回路增益(1/sec) 186 30 第六轴伺服系统的回路增益(1/sec) 201 0 *X 轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对)202 0 *Y 轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对)203 0 *Z 轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对)204 0 *第四轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对)205 0 *第五轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对)206 0 *第六轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对)221 0 X 轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)222 0 Y 轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)223 0 Z 轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)224 0 第四轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)225 0 第五轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)226 0 第六轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)241 0 *设定X 轴位置双回授对应机械轴242 0 *设定Y 轴位置双回授对应机械轴243 0 *设定Z 轴位置双回授对应机械轴244 0 *设定第四轴位置双回授对应机械轴245 0 *设定第五轴位置双回授对应机械轴246 0 *设定第六轴位置双回授对应机械轴261 250 X 轴位置双回授解析度(编:次/转;光:次/mm)262 250 Y 轴位置双回授解析度(编:次/转;光:次/mm)263 250 Z 轴位置双回授解析度(编:次/转;光:次/mm)264 250 第四轴位置双回授解析度(编:次/转;光:次/mm)265 250 第五轴位置双回授解析度(编:次/转;光:次/mm)266 250 第六轴位置双回授解析度(编:次/转;光:次/mm)281 0 X 轴直径轴或半径轴(0:半径轴;1:直径轴)282 0 Y 轴直径轴或半径轴(0:半径轴;1:直径轴)283 0 Z 轴直径轴或半径轴(0:半径轴;1:直径轴)284 0 第四轴直径轴或半径轴(0:半径轴;1:直径轴)285 0 第五轴直径轴或半径轴(0:半径轴;1:直径轴)286 0 第六轴直径轴或半径轴(0:半径轴;1:直径轴)301 4 X 轴位置双回授回授倍频302 4 Y 轴位置双回授回授倍频303 4 Z 轴位置双回授回授倍频304 4 第四轴位置双回授回授倍频305 4 第五轴位置双回授回授倍频306 4 第六轴位置双回授回授倍频321 100 *X 轴名称322 200 *Y 轴名称323 300 *Z 轴名称324 400 *第四轴轴名称325 500 *第五轴轴名称326 600 *第六轴轴名称341 1 X 轴命令倍率分子342 1 Y 轴命令倍率分子343 1 Z 轴命令倍率分子344 1 第四轴命令倍率分子345 1 第五轴命令倍率分子346 1 第六轴命令倍率分子361 1 X 轴命令倍率分母362 1 Y 轴命令倍率分母363 1 Z 轴命令倍率分母364 1 第四轴命令倍率分母365 1 第五轴命令倍率分母366 1 第六轴命令倍率分母381 2 *X 轴位置伺服方式(0:CW;1:电压;2:AB)382 2 *Y 轴位置伺服方式(0:CW;1:电压;2:AB)383 2 *Z 轴位置伺服方式(0:CW;1:电压;2:AB)384 2 *第四轴位置伺服方式(0:CW;1:电压;2:AB)385 2 *第五轴位置伺服方式(0:CW;1:电压;2:AB)386 2 *第六轴位置伺服方式(0:CW;1:电压;2:AB)401 250 切削时的加减速时间(ms)402 150 重力加速度加减速时间(ms)404 10 后加减速切削钟型加减速时间(ms)405 5000 切削时的最高速度(mm/min)406 500 转角参考速度(mm/min)408 1500 半径5mm圆弧切削参考速度(mm/min) 409 10 螺牙切削时的 1m/min加减速时间(ms) 410 200 手轮加减速时间(ms)411 0 G00运动方式(0:线性;1:各轴独立)413 0 G92座标座标保留模式(0:否;1:重置;2:关机)414 0 工件座标系统保留模式(0:否;1:重置;2:关机)415 0 *重置或关机时保留目前刀长资料(0:否;1:是)416 1000 刚性攻牙偶合时间(0.001 rev)417 0 刚性攻牙速度回路增益418 0 刚性攻牙加速度回路增益419 0 刚性攻牙主轴减速时间(ms)421 30 X 轴切削位置检查视窗(BLU)422 30 Y 轴切削位置检查视窗(BLU)423 30 Z 轴切削位置检查视窗(BLU)424 30 第四轴切削位置检查视窗(BLU)425 30 第五轴切削位置检查视窗(BLU)426 30 第六轴切削位置检查视窗(BLU)441 200 X 轴快速移动时(G00)的加减速时间(ms)442 200 Y 轴快速移动时(G00)的加减速时间(ms)443 200 Z 轴快速移动时(G00)的加减速时间(ms)444 200 第四轴快速移动时(G00)的加减速时间(ms)445 200 第五轴快速移动时(G00)的加减速时间(ms)446 200 第六轴快速移动时(G00)的加减速时间(ms)461 12000 X 轴快速移动最高速度(mm/min)462 12000 Y 轴快速移动最高速度(mm/min)463 10000 Z 轴快速移动最高速度(mm/min)464 5000 第四轴快速移动最高速度(deg/min) 465 5000 第五轴快速移动最高速度(deg/min) 466 5000 第六轴快速移动最高速度(deg/min) 481 30 X 轴快速移动位置检查视窗(BLU)482 30 Y 轴快速移动位置检查视窗(BLU)483 30 Z 轴快速移动位置检查视窗(BLU)484 30 第四轴快速移动位置检查视窗(BLU) 485 30 第五轴快速移动位置检查视窗(BLU) 486 30 第六轴快速移动位置检查视窗(BLU) 501 0 X 轴快速移动F0速度(mm/min)502 0 Y 轴快速移动F0速度(mm/min)503 0 Z 轴快速移动F0速度(mm/min)504 0 第四轴快速移动F0速度(deg/min)505 0 第五轴快速移动F0速度(deg/min)506 0 第六轴快速移动F0速度(deg/min) 521 5000 X 轴JOG 速度(mm/min)522 5000 Y 轴JOG 速度(mm/min)523 4000 Z 轴JOG 速度(mm/min)524 6000 第四轴JOG 速度(deg/min)525 6000 第五轴JOG 速度(deg/min)526 6000 第六轴JOG 速度(deg/min)541 100 X 轴切削加减速时间(ms)542 100 Y 轴切削加减速时间(ms)543 100 Z 轴切削加减速时间(ms)544 100 第四轴切削加减速时间(ms)545 100 第五轴切削加减速时间(ms)546 100 第六轴切削加减速时间(ms)561 100 X 轴遗失位置检查视窗(0.001 mm)562 100 Y 轴遗失位置检查视窗(0.001 mm) 563 100 Z 轴遗失位置检查视窗(0.001 mm) 564 100 第四轴遗失位置检查视窗(0.001 mm) 565 100 第五轴遗失位置检查视窗(0.001 mm) 566 100 第六轴遗失位置检查视窗(0.001 mm) 581 0 X 轴速度前馈补偿百分比582 0 Y 轴速度前馈补偿百分比583 0 Z 轴速度前馈补偿百分比584 0 第四轴速度前馈补偿百分比585 0 第五轴速度前馈补偿百分比586 0 第六轴速度前馈补偿百分比601 3600000 X 轴转角参考速度(mm/min)602 3600000 Y 轴转角参考速度(mm/min)603 3600000 Z 轴转角参考速度(mm/min)604 3600000 第四轴转角参考速度(mm/min)605 3600000 第五轴转角参考速度(mm/min)606 3600000 第六轴转角参考速度(mm/min)621 5000 X 轴切削时的最高速度(mm/min)622 5000 Y 轴切削时的最高速度(mm/min)623 5000 Z 轴切削时的最高速度(mm/min)624 5000 第四轴切削时的最高速度(mm/min) 625 5000 第五轴切削时的最高速度(mm/min) 626 5000 第六轴切削时的最高速度(mm/min) 641 0 X轴重力加速度加减速时间(ms)642 0 Y轴重力加速度加减速时间(ms)643 0 Z轴重力加速度加减速时间(ms)644 0 第四轴重力加速度加减速时间(ms) 645 0 第五轴重力加速度加减速时间(ms) 646 0 第六轴重力加速度加减速时间(ms) 701 1 *X 轴所属轴群702 1 *Y 轴所属轴群703 1 *Z 轴所属轴群704 1 *第四轴所属轴群705 1 *第五轴所属轴群706 1 *第六轴所属轴群721 1 *第一轴群对应的MST通道722 1 *第二轴群对应的MST通道723 1 *第三轴群对应的MST通道724 1 *第四轴群对应的MST通道731 2 *CNC主系统轴群数目803 0 *Home Dog来源(0:I/O; 1:轴卡)821 1500 X 轴寻原点速度(mm/min)822 1500 Y 轴寻原点速度(mm/min)823 1500 Z 轴寻原点速度(mm/min)824 5000 第四轴寻原点速度(deg/min)825 5000 第五轴寻原点速度(deg/min)826 5000 第六轴寻原点速度(deg/min)841 500 X 轴寻原点的第二段低速速度(mm/min)842 500 Y 轴寻原点的第二段低速速度(mm/min)843 500 Z 轴寻原点的第二段低速速度(mm/min)844 2000 第四轴寻原点的第二段低速速度(deg/min)845 2000 第五轴寻原点的第二段低速速度(deg/min)846 2000 第六轴寻原点的第二段低速速度(deg/min)861 0 X 轴寻原点方向为负方向(0:正方向1:负方向)862 0 Y 轴寻原点方向为负方向(0:正方向1:负方向)863 0 Z 轴寻原点方向为负方向(0:正方向1:负方向)864 0 第四轴寻原点方向为负方向865 0 第五轴寻原点方向为负方向866 0 第六轴寻原点方向为负方向881 0 X 轴寻原点的偏移量(BLU)882 0 Y 轴寻原点的偏移量(BLU)883 0 Z 轴寻原点的偏移量(BLU)884 0 第四轴寻原点的偏移量(BLU)885 0 第五轴寻原点的偏移量(BLU)886 0 第六轴寻原点的偏移量(BLU)901 3 X 轴零速检查视窗(count)902 3 Y 轴零速检查视窗(count)903 3 Z 轴零速检查视窗(count)904 3 第四轴零速检查视窗(count)905 3 第五轴零速检查视窗(count)906 3 第六轴零速检查视窗(count)921 0 X 轴Home Dog极性(0:正;1:负)922 0 Y 轴Home Dog极性(0:正;1:负)923 0 Z 轴Home Dog极性(0:正;1:负)924 0 第四轴Home Dog极性(0:正;1:负)925 0 第五轴Home Dog极性(0:正;1:负)926 0 第六轴Home Dog极性(0:正;1:负)941 0 启动X 轴寻原点栅格功能(0:关闭;1:启动)942 0 启动Y 轴寻原点栅格功能(0:关闭;1:启动)943 0 启动Z 轴寻原点栅格功能(0:关闭;1:启动)944 0 启动第四轴寻原点栅格功能(0:关闭;1:启动)945 0 启动第五轴寻原点栅格功能(0:关闭;1:启动)946 0 启动第六轴寻原点栅格功能(0:关闭;1:启动)961 0 设X 轴寻原点方法(0:DOG;1:索引;2:DOG+预设)962 0 设Y 轴寻原点方法(0:DOG;1:索引;2:DOG+预设)963 0 设Z 轴寻原点方法(0:DOG;1:索引;2:DOG+预设)964 0 设第四轴寻原点方法(0:DOG;1:索引;2:DOG+预设)965 0 设第五轴寻原点方法(0:DOG;1:索引;2:DOG+预设)966 0 设第六轴寻原点方法(0:DOG;1:索引;2:DOG+预设)1221 0 X 轴启动背隙补偿功能(0:关闭 1:启动)1222 0 Y 轴启动背隙补偿功能(0:关闭 1:启动)1223 0 Z 轴启动背隙补偿功能(0:关闭 1:启动)1224 0 第四轴启动背隙补偿功能1225 0 第五轴启动背隙补偿功能1226 0 第六轴启动背隙补偿功能1241 5 X 轴的背隙补偿量(BLU)1242 5 Y 轴的背隙补偿量(BLU)1243 0 Z 轴的背隙补偿量(BLU)1244 0 第四轴的背隙补偿量(BLU)1245 0 第五轴的背隙补偿量(BLU)1246 0 第六轴的背隙补偿量(BLU)1301 0 启动X 轴齿节误差补偿(0:无;1:单向;2:双向)1302 0 启动Y 轴齿节误差补偿(0:无;1:单向;2:双向)1303 0 启动Z 轴齿节误差补偿(0:无;1:单向;2:双向)1304 0 启动第四轴齿节误差补偿(0:无;1:单向;2:双向)1305 0 启动第五轴齿节误差补偿(0:无;1:单向;2:双向)1306 0 启动第六轴齿节误差补偿(0:无;1:单向;2:双向)1321 50000 X 轴齿节误差补偿节距长度(BLU) 1322 50000 Y 轴齿节误差补偿节距长度(BLU) 1323 50000 Z 轴齿节误差补偿节距长度(BLU) 1324 50000 第四轴齿节误差补偿节距长度(BLU) 1325 50000 第五轴齿节误差补偿节距长度(BLU) 1326 50000 第六轴齿节误差补偿节距长度(BLU) 1341 50 X 轴原点在补偿表的位置编号1342 50 Y 轴原点在补偿表的位置编号1343 50 Z 轴原点在补偿表的位置编号1344 50 第四轴原点在补偿表的位置编号1345 50 第五轴原点在补偿表的位置编号1346 50 第六轴轴原点在补偿表的位置编号1361 0 X 轴圆弧尖角正向补偿量(BLU) 1362 0 Y 轴圆弧尖角正向补偿量(BLU) 1363 0 Z 轴圆弧尖角正向补偿量(BLU) 1364 0 第四轴圆弧尖角正向补偿量(BLU) 1365 0 第五轴圆弧尖角正向补偿量(BLU) 1366 0 第六轴圆弧尖角正向补偿量(BLU) 1381 30 X 轴圆弧尖角补偿时间常数(ms) 1382 30 Y 轴圆弧尖角补偿时间常数(ms) 1383 30 Z 轴圆弧尖角补偿时间常数(ms) 1384 30 第四轴圆弧尖角补偿时间常数(ms) 1385 30 第五轴圆弧尖角补偿时间常数(ms) 1386 30 第六轴圆弧尖角补偿时间常数(ms) 1401 0 X 轴机构补偿时间常数(ms)1402 0 Y 轴机构补偿时间常数(ms)1403 0 Z 轴机构补偿时间常数(ms)1404 0 第四轴机构补偿时间常数(ms) 1405 0 第五轴机构补偿时间常数(ms) 1406 0 第六轴机构补偿时间常数(ms) 1421 10000 X 轴静态最大双回授误差(BLU) 1422 10000 Y 轴静态最大双回授误差(BLU) 1423 10000 Z 轴静态最大双回授误差(BLU)1424 10000 第四轴静态最大双回授误差(BLU) 1425 10000 第五轴静态最大双回授误差(BLU) 1426 10000 第六轴静态最大双回授误差(BLU) 1441 0 X 轴圆弧尖角负向补偿量(BLU)1442 0 Y 轴圆弧尖角负向补偿量(BLU)1443 0 Z 轴圆弧尖角负向补偿量(BLU)1444 0 第四轴圆弧尖角负向补偿量(BLU) 1445 0 第五轴圆弧尖角负向补偿量(BLU) 1446 0 第六轴圆弧尖角负向补偿量(BLU) 1581 0 前馈补偿时间常数(ms)1621 4 *第一主轴所对应的伺服轴或轴向轴1622 0 *第二主轴所对应的伺服轴或轴向轴1631 0 第一主轴零速OFFSET速度(0.1 mV) 1632 0 第二主轴零速OFFSET速度(0.1 mV) 1641 0 第一主轴编码器极性(0:正;1:负) 1642 0 第二主轴编码器极性(0:正;1:负) 1651 1000 第一主轴马达编码器一转的Pulse数1652 1000 第二主轴马达编码器一转的Pulse数1661 4 第一主轴的回授倍频1662 4 第二主轴的回授倍频1671 1800 第一主轴马达的增益(RPM/V)1672 200 第二主轴马达的增益(RPM/V)1681 1 第一主轴第一档螺杆侧齿数1682 1 第一主轴第一档马达侧齿数1683 1 第二主轴第一档螺杆侧齿数1684 1 第二主轴第一档马达侧齿数1711 0 *第一主轴是否安装编码器(0:否;1:是)1712 0 *第二主轴是否安装编码器(0:否;1:是)1721 10 第一主轴寸动速度(RPM)1722 10 第二主轴寸动速度(RPM)1731 100 第一主轴最低转速(RPM)1732 100 第二主轴最低转速(RPM)1741 50 第一主轴定位速度(RPM)1742 50 第二主轴定位速度(RPM)1751 0 第一主轴定位偏移量(0.001deg)1752 0 第二主轴定位偏移量(0.001deg)1761 1000 第一主轴定位减速时间(ms)1762 1000 第二主轴定位减速时间(ms)1771 0 第一主轴原点偏移量(0.001deg)1772 0 第二主轴原点偏移量(0.001deg)1781 0 第一主轴定位最低速度(RPM)1782 0 第二主轴定位最低速度(RPM)1791 0 *第一主轴马达型态(0:变频;1:P主轴;2:V主轴;3:伺服)1792 0 *第二主轴马达型态(0:变频;1:P主轴;2:V主轴;3:伺服)1801 17500 第一主轴最高转速(RPM)1802 8000 第二主轴最高转速(RPM)1811 0 第一主轴编码器安装位置(0:主轴侧;1:马达侧)1812 0 第二主轴编码器安装位置(0:主轴侧;1:马达侧)1821 0 第一主轴伺服微分增益1822 0 第二主轴伺服微分增益1831 0 第一主轴加减速时间(ms)1832 0 第二主轴加减速时间(ms)1841 0 第一主轴Y-Delta切换速度(RPM) 1842 0 第二主轴Y-Delta切换速度(RPM) 1851 150 第一主轴重力速度加减速时间(ms) 1852 150 第二主轴重力速度加减速时间(ms) 1901 1 第一主轴第二档螺杆侧齿数1902 1 第一主轴第二档马达侧齿数1903 1 第二主轴第二档螺杆侧齿数1904 1 第二主轴第二档马达侧齿数1921 1 第一主轴第三档螺杆侧齿数1922 1 第一主轴第三档马达侧齿数1923 1 第二主轴第三档螺杆侧齿数1924 1 第二主轴第三档马达侧齿数1941 1 第一主轴第四档螺杆侧齿数1942 1 第一主轴第四档马达侧齿数1943 1 第二主轴第四档螺杆侧齿数1944 1 第二主轴第四档马达侧齿数2001 100 手轮第四段倍率(最小输入单位,LIU) 2003 1 MPG程式模拟对应手轮号码2021 5 *设定一号手轮对应的伺服轴2022 0 *设定二号手轮对应的伺服轴2023 0 *设定三号手轮对应的伺服轴2031 0 一号手轮对应的轴向轴(0:MLC;1~6:轴向)2032 0 二号手轮对应的轴向轴(0:MLC;1~6:轴向)2033 0 三号手轮对应的轴向轴(0:MLC;1~6:轴向)2041 100 一号手轮解析度(Pulse/转)2042 100 二号手轮解析度(Pulse/转)2043 100 三号手轮解析度(Pulse/转)2051 4 一号手轮回授倍频2052 4 二号手轮回授倍频2053 4 三号手轮回授倍频2061 1 一号手轮螺杆侧齿数2062 1 一号手轮马达侧齿数2063 1 二号手轮螺杆侧齿数2064 1 二号手轮马达侧齿数2065 1 三号手轮螺杆侧齿数2066 1 三号手轮马达侧齿数2401 1000 X 轴第一软体行程正极限(BLU)(根据实际的机床距离设定)2402 -800000 X 轴第一软体行程负极限(BLU) (根据实际的机床距离设定)2403 2000 Y 轴第一软体行程正极限(BLU) (根据实际的机床距离设定)2404 -700000 Y 轴第一软体行程负极限(BLU) (根据实际的机床距离设定)2405 2000 Z 轴第一软体行程正极限(BLU) (根据实际的机床距离设定)2406 -300000 Z 轴第一软体行程负极限(BLU) (根据实际的机床距离设定)2407 999999999 第四轴第一软体行程正极限(BLU) 2408 -999999999 第四轴第一软体行程负极限(BLU) 2409 999999999 第五轴第一软体行程正极限(BLU) 2410 -999999999 第五轴第一软体行程负极限(BLU) 2411 999999999 第六轴第一软体行程正极限(BLU) 2412 -999999999 第六轴第一软体行程负极限(BLU) 2441 0 X 轴第二软体行程正极限(BLU)2442 0 X 轴第二软体行程负极限(BLU)2443 0 Y 轴第二软体行程正极限(BLU)2444 0 Y 轴第二软体行程负极限(BLU)2445 0 Z 轴第二软体行程正极限(BLU)2446 0 Z 轴第二软体行程负极限(BLU)2447 0 第四轴第二软体行程正极限(BLU) 2448 0 第四轴第二软体行程负极限(BLU) 2449 0 第五轴第二软体行程正极限(BLU) 2450 0 第五轴第二软体行程负极限(BLU) 2451 0 第六轴第二软体行程正极限(BLU) 2452 0 第六轴第二软体行程负极限(BLU) 2801 0 X 轴第二参考点机械座标(BLU)2802 0 Y 轴第二参考点机械座标(BLU)2803 0 Z 轴第二参考点机械座标(BLU)2804 0 第四轴第二参考点机械座标(BLU) 2805 0 第五轴第二参考点机械座标(BLU) 2806 0 第六轴第二参考点机械座标(BLU) 2821 0 X 轴第三参考点机械座标(BLU)2822 0 Y 轴第三参考点机械座标(BLU)2823 0 Z 轴第三参考点机械座标(BLU)2824 0 第四轴第三参考点机械座标(BLU)2825 0 第五轴第三参考点机械座标(BLU)2826 0 第六轴第三参考点机械座标(BLU)2841 0 X 轴第四参考点机械座标(BLU)2842 0 Y 轴第四参考点机械座标(BLU)2843 0 Z 轴第四参考点机械座标(BLU)2844 0 第四轴第四参考点机械座标(BLU)2845 0 第五轴第四参考点机械座标(BLU)2846 0 第六轴第四参考点机械座标(BLU)3201 0 *启动车床规则(0:关闭;1:C;2:A:3:B) 3202 2000 *I/O扫瞄时间(0.001 ms)3203 2000 *补间时间(0.001 ms)3204 8000 *PLC扫瞄时间(0.001 ms)3205 1 *功能键型态(0:5个键;1:8个键;2:触控)3207 1 *C/S界面版本编号(1:百分比;2:段数) 3209 1 *Language(0:English;1:Chinese;2:Local;3:Simplified) 3211 0 *使用单色萤幕(0:彩色;1:单色)3213 3 磁碟机代号(0:A;1:B;2:D;3:N)3215 0 *选刀时呼叫模式(0:一般;1:副程;2:巨集)3217 0 *控制键盘型态3219 3 *系统安装组态(0:NoSRAM;1:SRAM;2:HardDisk;3:CFCard)3221 0 除错模式(0:一般;1:应用;2:系统)3223 1 启动系统管理功能(0:关闭;1:启动)3225 0 *萤幕保护功能延迟时间(分,0:关闭) 3227 0 *萤幕解析度(0:640x480;1:800x600) 3229 0 关闭工件座标功能(0:启动;1:关闭)3230 0 关闭车床刀长设定画面(0:启动;1:关闭)3231 0 *COM1远端装置型态(0:No;1:FX2;2:视觉;3:FX2-V2)3232 0 *COM2远端装置型态(0:No;1:FX2;2:视觉;3:FX2-V2)3236 0 *网路局号(0:关闭;1-31:网路局号) 3237 1024 *公布资料起始R暂存器编号3238 0 *公布资料R暂存器长度3241 0 *工件程式小数点型态(0:标准;1:计算机)3243 0 *键盘重置键由PLC处理(0:人机;1:PLC)3245 1000 刀长补偿输入增量最大值(BLU)3247 0 速率显示方式(0:mm/min;1:m/min) 3251 0 *触摸式萤幕型态(0:无;1:PenMount) 3252 25 *触摸式萤幕Xmin3253 996 *触摸式萤幕Xmax3254 28 *触摸式萤幕Ymin3255 1006 *触摸式萤幕Ymax3401 0 MLC暂存器81(设置为R81=100 进给、模式等为键盘控制)3402 0 MLC暂存器823403 0 MLC暂存器833404 0 MLC暂存器843405 1000 MLC暂存器85(设置注油器注油关的时间)3406 83805 MLC暂存器86(设置注油器注油开的时间)3407 0 MLC暂存器873408 0 MLC暂存器883409 0 MLC暂存器893410 0 MLC暂存器90 (对刀次数设定)3411 0 MLC暂存器913412 0 MLC暂存器923413 0 MLC暂存器933414 0 MLC暂存器943415 0 MLC暂存器953416 0 MLC暂存器963417 0 MLC暂存器973418 0 MLC暂存器983419 0 MLC暂存器993420 0 MLC暂存器1003601 0 *M码呼叫巨集登录表编号13602 0 *M码呼叫巨集登录表编号23603 0 *M码呼叫巨集登录表编号33604 0 *M码呼叫巨集登录表编号43605 0 *M码呼叫巨集登录表编号53606 0 *M码呼叫巨集登录表编号63607 0 *M码呼叫巨集登录表编号73608 0 *M码呼叫巨集登录表编号83609 0 *M码呼叫巨集登录表编号93610 0 *M码呼叫巨集登录表编号103701 0 *G码呼叫巨集登录表编号13702 0 *G码呼叫巨集登录表编号23703 0 *G码呼叫巨集登录表编号33704 0 *G码呼叫巨集登录表编号43705 0 *G码呼叫巨集登录表编号53706 0 *G码呼叫巨集登录表编号63707 0 *G码呼叫巨集登录表编号73708 0 *G码呼叫巨集登录表编号83709 0 *G码呼叫巨集登录表编号93710 0 *G码呼叫巨集登录表编号103801 0 G95时进给量与主轴位置紧密偶合3802 1 内定高精控制模式(0:G64;1:G62;2:G62.1)3804 99 工件计数M码编号3805 1000 静态双回授误差检查时间(ms)3807 5 圆弧终点不在圆弧上检查视窗(BLU) 3809 0 *是否UVW为XYZ轴增量命令(0:否;1:是)3810 0 *启动同一单节M code同时执行功能(0:否;1:是)3811 0 *公用变数永久保留区起始位置3813 0 *扩充型公用变数数目3815 0 刀具半径补偿预看模式(0:否;1:是) 3816 0 刀长补偿模式(0:Z;1:单轴;2:多轴) 3817 10000 严重双回授误差(BLU)3819 1 过切检查模式(0:关闭;1:检查;2:修正)3821 0 *第一组轴偶合主动轴轴号3822 0 *第一组轴偶合跟随轴轴号3823 1 *第一组轴偶合主动轴分量3824 0 *第一组轴偶合跟随轴分量3825 0 *第一组轴偶合偶合型态(0:不;1:机;2:对同;3:载;;2:主同)3826 0 第一组轴偶合偶合时间(ms)3827 0 第一组轴偶合分离时间(ms)3831 1000 *放电解析度(0.001us)3832 0 *放电延迟时间3841 0 刀具量测Z+接触面座标(BLU)3842 0 刀具量测Z-接触面座标(BLU)3843 0 刀具量测X+接触面座标(BLU)3844 0 刀具量测X-接触面座标(BLU)3851 999900 断刀处理程式号码(0不启动)3861 0 *第二组轴偶合主动轴轴号3862 0 *第二组轴偶合跟随轴轴号3863 1 *第二组轴偶合主动轴分量3864 0 *第二组轴偶合跟随轴分量3865 0 *第二组轴偶合偶合型态(0:不;1:机;2:对同;3:载;;2:主同)3866 0 第二组轴偶合偶合时间(ms)3867 0 第二组轴偶合分离时间(ms)3871 0 *第三组轴偶合主动轴轴号3872 0 *第三组轴偶合跟随轴轴号3873 1 *第三组轴偶合主动轴分量3874 0 *第三组轴偶合跟随轴分量3875 0 *第三组轴偶合偶合型态(0:不;1:机;2:对同;3:载;;2:主同)3876 0 第三组轴偶合偶合时间(ms)3877 0 第三组轴偶合分离时间(ms)3881 0 *第四组轴偶合主动轴轴号3882 0 *第四组轴偶合跟随轴轴号3883 1 *第四组轴偶合主动轴分量3884 0 *第四组轴偶合跟随轴分量3885 0 *第四组轴偶合偶合型态(0:不;1:机;2:对同;3:载;;2:主同)3886 0 第四组轴偶合偶合时间(ms)3887 0 第四组轴偶合分离时间(ms)3901 0 主从模式(0:控制器;1:周边或PC) 3903 1 档案传输通讯埠位置(1:第一埠;2:第二埠)3905 1 巨集程式通讯埠位置(1:第一埠;2:第二埠)3921 3 第一埠速度(0:24;1:48;2:96;3:192;4:384;5:576;6:1152)3922 8 第一埠资料位元数3923 0 第一埠交换码格式(0:ASCII;1:EIA;2:ISO)3924 0 第一埠周边控制方式(0:No;1:DC2;2:DC4;3:DC2DC4)3925 0 第一埠单节结束(EOB)输出方式(0:EOB;1:CR+EOB)3926 0 第一埠DC3周边控制码是否同位(0:否;1:同位)3927 1 第一埠流量控制方式(0:无;1:硬体;2:软体;3:RS485)3928 0 第一埠同位检查方式(0:无;1:奇;2:偶)3929 1 第一埠停止位元数(1:1位元;2:2位元)3941 3 第二埠速度(0:24;1:48;2:96;3:192;4:384;5:576;6:1152)3942 8 第二埠资料位元数3943 0 第二埠交换码格式(0:ASCII;1:EIA;2:ISO)3944 0 第二埠周边控制方式(0:No;1:DC2;2:DC4;3:DC2DC4)3945 0 第二埠单节结束(EOB)输出方式(0:EOB;1:CR+EOB)3946 0 第二埠DC3周边控制码是否同位(0:否;1:同位)3947 1 第二埠流量控制方式(0:无;1:硬体;2:软体;3:RS485)3948 0 第二埠同位检查方式(0:无;1:奇;2:偶)3949 1 第二埠停止位元数(1:1位元;2:2位元) 8001~9200 0 轴齿节误差绝对补偿量正向表编号1~100使用者参数:4001 0 设定啄钻型态(0:一般;1:高速)4002 5000 设定钻孔循环退刀量(LIU)4004 0 设定攻牙循环退刀量(LIU)4010 50 铣削循环平面进给量百分比4020 0 设定塘孔主轴停止方向(0:X+,X-,Y+,Y-)。
新代系统原点设定参数
新代系统原点设定参数一、引言在信息技术迅猛发展的今天,新代系统的设计和开发变得愈发重要。
系统的原点设定参数是系统设计的基础,决定了系统功能、性能和可扩展性等方面的发展空间。
本文将探讨新代系统原点设定参数的重要性以及如何进行参数设定。
二、重要性新代系统原点设定参数的合理性对系统的发展和运行至关重要。
一个合理设定的原点参数能够决定系统的性能、稳定性和可用性,在系统设计的初始阶段就能够指导系统的开发方向。
同时,原点参数的设定也会直接影响到系统改进和升级的难度和成本。
三、性能参数设定性能参数设定是新代系统原点参数设定的重要组成部分。
以下是一些常见的性能参数:1. 并发用户数并发用户数是指系统能够同时处理的用户请求数量。
根据系统的预期使用情况以及硬件设备的配置,合理设定并发用户数可以保证系统在高负载下仍能正常运行。
2. 响应时间响应时间是指系统处理用户请求所需的时间。
对于需要高实时性的系统,响应时间的设定尤为重要。
通常,响应时间应根据系统需求和性能要求来设定,确保用户操作流畅且反馈及时。
3. 吞吐量吞吐量是指系统在一定时间内能够处理的请求数量。
合理设定吞吐量能够充分利用系统资源,提高系统效率,同时避免资源浪费。
四、可扩展性参数设定可扩展性参数设定是新代系统原点参数设定的关键环节。
以下是一些常见的可扩展性参数:1. 硬件资源合理设定硬件资源的配置,包括处理器数量、内存大小和存储容量等,能够支持系统的扩展和升级。
根据预期的用户数量和使用情况,合理规划硬件资源,确保系统能够满足未来的需求。
2. 分布式架构采用分布式架构能够有效提高系统的可扩展性。
确定分布式架构的参数,如节点数量、网络拓扑等,可以支持系统的水平扩展,提高系统的性能和可用性。
3. 数据库设计数据库设计对系统的扩展性影响重大。
合理设计数据库的表结构、索引和分区等参数,可以提高系统的查询性能和数据存储能力,同时支持系统的扩展和升级。
4. 异步处理采用异步处理方式能够提高系统的并发处理能力。
新代系统参数

X轴感应器(0编码器,2无)
202
Y轴感应器(0编码器,2无)
203
Z轴感应器(0编码器,2无)
206
第六轴感应器(0编码器,2无)
221
X轴轴的型态(0线性,1-5旋转)
0
222
Y轴轴的型态(0线性,1-5旋转)
0
223
Z轴轴的型态(0线性,1-5旋转)
0
226
第六轴轴的型态(0线性,1-5旋转)
1000
822
Y轴寻原点速度(mm/min)
1000
823
Z轴寻原点速度(mm/min)
1000
826
第六轴寻原点速度(mm/min)
1000
841
X轴寻原点的第二段低速速度
200
842
Y轴寻原点的第二段低速速度
200
843
Z轴寻原点的第二段低速速度
200
846
第六轴寻原点的第二段低速速度
200
881
2500
66
第六轴解析度(一般为)
2500
131
第六轴螺杆侧齿数(看分度头标准)
90
161
X轴的螺距
162
Y轴的螺距
163
Z轴的螺距
166
第六轴的螺距(MM)
360
181
X轴伺服系统的回路增益(1/sec)
182
Y轴伺服系统的回路增益(1/sec)
183
Z轴伺服系统的回路增益(1/sec)
186
第六轴伺服系统的回路增益(1/sec)
521/522/523/XYZ第六轴JOG速度(mm/min)
541/542/543/546/XYZ第六轴切削加速时间(ms)
新代系统参数

参数
说明
值
参数
说明
值
1
设定第一轴轴板基址:四槽机800,一体机512
3
设定第一轴IO板基址
512
5
IO板组态
7
9
轴板型态(3为四轴加常闭接点)
3
10
伺服警报接点(0常开,1常闭)
1
11
轴板时脉来源(0一体机,2四槽机)
0
18
高速高精允许最大弦误差(默认值)
15
21
设定X轴对应的伺服轴
1000
2404
Y轴第一软体行程负极限(MM)
1000
2405
Z轴第一软体行程正极限(MM)
1000
2406
Z轴第一软体行程负极限(MM)
1000
3202
I/O扫描时间(0。001ms)
3000
3203
补间时间(0.001ms)
2000
3404
PLC扫描时间(0。001ms)
10000
3205
功能键型态(0:5,1:8)
1
3225
萤幕保护功能延迟时间(分)0是关
3227
萤幕解析度(0:640*480 1,2:800*600)
0
3229
关闭工件坐标功能(0开,1关)
0
3401
MLC暂存器81(第一把刀X坐标)
3402
直排刀库:第一把刀Y坐标;刀劈式刀库:设1是变频器报警功能
3403
直排刀库:X方向刀具之间的距离;刀臂式刀库:设1润滑油报警功能
X轴寻原点的偏移量(BLU)
0
882
Y轴寻原点的偏移量(BLU)
新代系统断点加工参数设置

新代系统断点加工参数设置
新代系统断点加工参数设置是指在进行CNC加工过程中,根
据具体的加工要求和材料特性,设置断点参数以控制加工过程的关键参数。
以下是一些常见的新代系统断点加工参数设置:
1. 断点位置:根据工件的几何形状和加工路径,设置适当的断点位置,以确保加工过程的连续性和精度。
2. 切削深度:根据工件的材料和机床的切削能力,设置适当的切削深度,以保证加工过程中切削刀具的稳定性和寿命。
3. 进给速度:根据工件的材料和机床的进给能力,设置适当的进给速度,以确保加工过程中切削刀具的切削效率和表面质量。
4. 切削速度:根据工件的材料和切削刀具的材质和涂层等因素,设置适当的切削速度,以实现最佳的切削效果和刀具寿命。
5. 切削方式:根据工件的形状和材料特性,选择合适的切削方式,如顺铣、逆铣、攻丝等,以提高加工效率和质量。
6. 冷却液:根据工件的材料和切削过程的热量产生情况,选择适当的冷却液类型和喷射方式,以降低切削温度,减少刀具磨损和工件变形。
以上是一些常见的新代系统断点加工参数设置,根据具体的加工要求和条件,还可以进一步进行调整和优化,以达到最佳的加工效果和经济效益。
新代系统实用标准全参数

新代系统标准参数(供参考)Model: 900ME Version: 10.69Modification Date: 2006/09/24 Time: 15:08:16Model: 900ME Version: 10.69Modification Date: 2006/09/24 Time: 15:08:16No Value Title1 800 *设定第一轴轴板基址3 512 *设定第一轴IO板基址5 7 *IO板组态(0:EIO;1:H+3R1;2:H+R2+2R1;3:2R2+4R1)9 3 *轴板型态(0:E2;1:S4;2:S4+A;3:S4+B;4:E4;5:S6)10 0 *伺服警报接点型态(0:A;1:B;S6卡)11 2 *轴板时脉来源(0:轴板;1:Bus;2:VIA)12 400 *Servo6轴板最高时脉(Kpps)13 1 *设定轴板数目15 3 I/O板数位滤波程度17 2 *设定控制精度,BLU(1:条;2:微米;3:次微米)21 1 *设定X 轴对应的伺服轴22 2 *设定Y 轴对应的伺服轴23 3 *设定Z 轴对应的伺服轴24 0 *设定第四轴对应的伺服轴25 0 *设定第五轴对应的伺服轴26 0 *设定第六轴对应的伺服轴41 1 X 轴运动方向反向(0:正 1:反)42 0 Y 轴运动方向反向(0:正 1:反)43 1 Z 轴运动方向反向(0:正 1:反)44 0 第四轴运动方向反向45 0 第五轴运动方向反向46 0 第六轴运动方向反向61 4000 X 轴感应器解析度(编:次/转;光:次/mm)62 4000 Y 轴感应器解析度(编:次/转;光:次/mm)63 4000 Z 轴感应器解析度(编:次/转;光:次/mm)64 2500 第四轴感应器解析度(编:次/转;光:次/mm)65 2500 第五轴感应器解析度(编:次/转;光:次/mm)66 2500 第六轴感应器解析度(编:次/转;光:次/mm)81 4 X 轴的回授倍频82 4 Y 轴的回授倍频83 4 Z 轴的回授倍频84 4 第四轴的回授倍频85 4 第五轴的回授倍频86 4 第六轴的回授倍频101 200 X 轴马达的增益(RPM/V)102 200 Y 轴马达的增益(RPM/V)103 200 Z 轴马达的增益(RPM/V)104 200 第四轴马达的增益(RPM/V)105 200 第五轴马达的增益(RPM/V)106 200 第六轴马达的增益(RPM/V)121 1 X 轴螺杆侧齿数122 1 X 轴马达侧齿数123 1 Y 轴螺杆侧齿数124 1 Y 轴马达侧齿数125 1 Z 轴螺杆侧齿数126 1 Z 轴马达侧齿数127 1 第四轴螺杆侧齿数128 1 第四轴马达侧齿数129 1 第五轴螺杆侧齿数130 1 第五轴马达侧齿数131 1 第六轴螺杆侧齿数132 1 第六轴马达侧齿数161 10000 X 轴的PITCH(BLU)162 10000 Y 轴的PITCH(BLU)163 10000 Z 轴的PITCH(BLU)164 5000 第四轴的PITCH(BLU)165 5000 第五轴的PITCH(BLU)166 5000 第六轴的PITCH(BLU)181 120 X 轴伺服系统的回路增益(1/sec)182 120 Y 轴伺服系统的回路增益(1/sec)183 120 Z 轴伺服系统的回路增益(1/sec)184 30 第四轴伺服系统的回路增益(1/sec)185 30 第五轴伺服系统的回路增益(1/sec)186 30 第六轴伺服系统的回路增益(1/sec)201 0 *X 轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对) 202 0 *Y 轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对) 203 0 *Z 轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对) 204 0 *第四轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对) 205 0 *第五轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对) 206 0 *第六轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对) 221 0 X 轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)222 0 Y 轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)223 0 Z 轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)224 0 第四轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)225 0 第五轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)226 0 第六轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)241 0 *设定X 轴位置双回授对应机械轴242 0 *设定Y 轴位置双回授对应机械轴243 0 *设定Z 轴位置双回授对应机械轴244 0 *设定第四轴位置双回授对应机械轴245 0 *设定第五轴位置双回授对应机械轴246 0 *设定第六轴位置双回授对应机械轴261 250 X 轴位置双回授解析度(编:次/转;光:次/mm)262 250 Y 轴位置双回授解析度(编:次/转;光:次/mm)263 250 Z 轴位置双回授解析度(编:次/转;光:次/mm) 264 250 第四轴位置双回授解析度(编:次/转;光:次/mm) 265 250 第五轴位置双回授解析度(编:次/转;光:次/mm) 266 250 第六轴位置双回授解析度(编:次/转;光:次/mm) 281 0 X 轴直径轴或半径轴(0:半径轴;1:直径轴)282 0 Y 轴直径轴或半径轴(0:半径轴;1:直径轴)283 0 Z 轴直径轴或半径轴(0:半径轴;1:直径轴)284 0 第四轴直径轴或半径轴(0:半径轴;1:直径轴) 285 0 第五轴直径轴或半径轴(0:半径轴;1:直径轴) 286 0 第六轴直径轴或半径轴(0:半径轴;1:直径轴) 301 4 X 轴位置双回授回授倍频302 4 Y 轴位置双回授回授倍频303 4 Z 轴位置双回授回授倍频304 4 第四轴位置双回授回授倍频305 4 第五轴位置双回授回授倍频306 4 第六轴位置双回授回授倍频321 100 *X 轴名称322 200 *Y 轴名称323 300 *Z 轴名称324 400 *第四轴轴名称325 500 *第五轴轴名称326 600 *第六轴轴名称341 1 X 轴命令倍率分子342 1 Y 轴命令倍率分子343 1 Z 轴命令倍率分子344 1 第四轴命令倍率分子345 1 第五轴命令倍率分子346 1 第六轴命令倍率分子361 1 X 轴命令倍率分母362 1 Y 轴命令倍率分母363 1 Z 轴命令倍率分母364 1 第四轴命令倍率分母365 1 第五轴命令倍率分母366 1 第六轴命令倍率分母381 2 *X 轴位置伺服方式(0:CW;1:电压;2:AB)382 2 *Y 轴位置伺服方式(0:CW;1:电压;2:AB)383 2 *Z 轴位置伺服方式(0:CW;1:电压;2:AB)384 2 *第四轴位置伺服方式(0:CW;1:电压;2:AB)385 2 *第五轴位置伺服方式(0:CW;1:电压;2:AB)386 2 *第六轴位置伺服方式(0:CW;1:电压;2:AB)401 250 切削时的加减速时间(ms)402 150 重力加速度加减速时间(ms)404 10 后加减速切削钟型加减速时间(ms)405 5000 切削时的最高速度(mm/min)406 500 转角参考速度(mm/min)408 1500 半径5mm圆弧切削参考速度(mm/min)409 10 螺牙切削时的 1m/min加减速时间(ms)410 200 手轮加减速时间(ms)411 0 G00运动方式(0:线性;1:各轴独立)413 0 G92座标座标保留模式(0:否;1:重置;2:关机) 414 0 工件座标系统保留模式(0:否;1:重置;2:关机) 415 0 *重置或关机时保留目前刀长资料(0:否;1:是) 416 1000 刚性攻牙偶合时间(0.001 rev)417 0 刚性攻牙速度回路增益418 0 刚性攻牙加速度回路增益419 0 刚性攻牙主轴减速时间(ms)421 30 X 轴切削位置检查视窗(BLU)422 30 Y 轴切削位置检查视窗(BLU)423 30 Z 轴切削位置检查视窗(BLU)424 30 第四轴切削位置检查视窗(BLU)425 30 第五轴切削位置检查视窗(BLU)426 30 第六轴切削位置检查视窗(BLU)441 200 X 轴快速移动时(G00)的加减速时间(ms)442 200 Y 轴快速移动时(G00)的加减速时间(ms)443 200 Z 轴快速移动时(G00)的加减速时间(ms)444 200 第四轴快速移动时(G00)的加减速时间(ms)445 200 第五轴快速移动时(G00)的加减速时间(ms)446 200 第六轴快速移动时(G00)的加减速时间(ms) 461 12000 X 轴快速移动最高速度(mm/min)462 12000 Y 轴快速移动最高速度(mm/min)463 10000 Z 轴快速移动最高速度(mm/min)464 5000 第四轴快速移动最高速度(deg/min)465 5000 第五轴快速移动最高速度(deg/min)466 5000 第六轴快速移动最高速度(deg/min)481 30 X 轴快速移动位置检查视窗(BLU)482 30 Y 轴快速移动位置检查视窗(BLU)483 30 Z 轴快速移动位置检查视窗(BLU)484 30 第四轴快速移动位置检查视窗(BLU)485 30 第五轴快速移动位置检查视窗(BLU)486 30 第六轴快速移动位置检查视窗(BLU)501 0 X 轴快速移动F0速度(mm/min)502 0 Y 轴快速移动F0速度(mm/min)503 0 Z 轴快速移动F0速度(mm/min)504 0 第四轴快速移动F0速度(deg/min)505 0 第五轴快速移动F0速度(deg/min)506 0 第六轴快速移动F0速度(deg/min)521 5000 X 轴JOG 速度(mm/min)522 5000 Y 轴JOG 速度(mm/min)523 4000 Z 轴JOG 速度(mm/min)524 6000 第四轴JOG 速度(deg/min)525 6000 第五轴JOG 速度(deg/min)526 6000 第六轴JOG 速度(deg/min)541 100 X 轴切削加减速时间(ms)542 100 Y 轴切削加减速时间(ms)543 100 Z 轴切削加减速时间(ms)544 100 第四轴切削加减速时间(ms)545 100 第五轴切削加减速时间(ms)546 100 第六轴切削加减速时间(ms)561 100 X 轴遗失位置检查视窗(0.001 mm) 562 100 Y 轴遗失位置检查视窗(0.001 mm) 563 100 Z 轴遗失位置检查视窗(0.001 mm) 564 100 第四轴遗失位置检查视窗(0.001 mm) 565 100 第五轴遗失位置检查视窗(0.001 mm) 566 100 第六轴遗失位置检查视窗(0.001 mm) 581 0 X 轴速度前馈补偿百分比582 0 Y 轴速度前馈补偿百分比583 0 Z 轴速度前馈补偿百分比584 0 第四轴速度前馈补偿百分比585 0 第五轴速度前馈补偿百分比586 0 第六轴速度前馈补偿百分比601 3600000 X 轴转角参考速度(mm/min)602 3600000 Y 轴转角参考速度(mm/min)603 3600000 Z 轴转角参考速度(mm/min)604 3600000 第四轴转角参考速度(mm/min)605 3600000 第五轴转角参考速度(mm/min)606 3600000 第六轴转角参考速度(mm/min)621 5000 X 轴切削时的最高速度(mm/min)622 5000 Y 轴切削时的最高速度(mm/min)623 5000 Z 轴切削时的最高速度(mm/min)624 5000 第四轴切削时的最高速度(mm/min) 625 5000 第五轴切削时的最高速度(mm/min) 626 5000 第六轴切削时的最高速度(mm/min) 641 0 X轴重力加速度加减速时间(ms)642 0 Y轴重力加速度加减速时间(ms)643 0 Z轴重力加速度加减速时间(ms)644 0 第四轴重力加速度加减速时间(ms) 645 0 第五轴重力加速度加减速时间(ms) 646 0 第六轴重力加速度加减速时间(ms) 701 1 *X 轴所属轴群702 1 *Y 轴所属轴群703 1 *Z 轴所属轴群704 1 *第四轴所属轴群705 1 *第五轴所属轴群706 1 *第六轴所属轴群721 1 *第一轴群对应的MST通道722 1 *第二轴群对应的MST通道723 1 *第三轴群对应的MST通道724 1 *第四轴群对应的MST通道731 2 *CNC主系统轴群数目803 0 *Home Dog来源(0:I/O; 1:轴卡)821 1500 X 轴寻原点速度(mm/min)822 1500 Y 轴寻原点速度(mm/min)823 1500 Z 轴寻原点速度(mm/min)824 5000 第四轴寻原点速度(deg/min)825 5000 第五轴寻原点速度(deg/min)826 5000 第六轴寻原点速度(deg/min)841 500 X 轴寻原点的第二段低速速度(mm/min)842 500 Y 轴寻原点的第二段低速速度(mm/min)843 500 Z 轴寻原点的第二段低速速度(mm/min)844 2000 第四轴寻原点的第二段低速速度(deg/min)845 2000 第五轴寻原点的第二段低速速度(deg/min)846 2000 第六轴寻原点的第二段低速速度(deg/min)861 0 X 轴寻原点方向为负方向(0:正方向 1:负方向) 862 0 Y 轴寻原点方向为负方向(0:正方向 1:负方向) 863 0 Z 轴寻原点方向为负方向(0:正方向 1:负方向) 864 0 第四轴寻原点方向为负方向865 0 第五轴寻原点方向为负方向866 0 第六轴寻原点方向为负方向881 0 X 轴寻原点的偏移量(BLU)882 0 Y 轴寻原点的偏移量(BLU)883 0 Z 轴寻原点的偏移量(BLU)884 0 第四轴寻原点的偏移量(BLU)885 0 第五轴寻原点的偏移量(BLU)886 0 第六轴寻原点的偏移量(BLU)901 3 X 轴零速检查视窗(count)902 3 Y 轴零速检查视窗(count)903 3 Z 轴零速检查视窗(count)904 3 第四轴零速检查视窗(count)905 3 第五轴零速检查视窗(count)906 3 第六轴零速检查视窗(count)921 0 X 轴Home Dog极性(0:正;1:负)922 0 Y 轴Home Dog极性(0:正;1:负)923 0 Z 轴Home Dog极性(0:正;1:负)924 0 第四轴Home Dog极性(0:正;1:负)925 0 第五轴Home Dog极性(0:正;1:负)926 0 第六轴Home Dog极性(0:正;1:负)941 0 启动X 轴寻原点栅格功能(0:关闭;1:启动)942 0 启动Y 轴寻原点栅格功能(0:关闭;1:启动)943 0 启动Z 轴寻原点栅格功能(0:关闭;1:启动)944 0 启动第四轴寻原点栅格功能(0:关闭;1:启动)945 0 启动第五轴寻原点栅格功能(0:关闭;1:启动)946 0 启动第六轴寻原点栅格功能(0:关闭;1:启动)961 0 设X 轴寻原点方法(0:DOG;1:索引;2:DOG+预设)962 0 设Y 轴寻原点方法(0:DOG;1:索引;2:DOG+预设)963 0 设Z 轴寻原点方法(0:DOG;1:索引;2:DOG+预设) 964 0 设第四轴寻原点方法(0:DOG;1:索引;2:DOG+预设) 965 0 设第五轴寻原点方法(0:DOG;1:索引;2:DOG+预设) 966 0 设第六轴寻原点方法(0:DOG;1:索引;2:DOG+预设) 1221 0 X 轴启动背隙补偿功能(0:关闭 1:启动)1222 0 Y 轴启动背隙补偿功能(0:关闭 1:启动)1223 0 Z 轴启动背隙补偿功能(0:关闭 1:启动)1224 0 第四轴启动背隙补偿功能1225 0 第五轴启动背隙补偿功能1226 0 第六轴启动背隙补偿功能1241 5 X 轴的背隙补偿量(BLU)1242 5 Y 轴的背隙补偿量(BLU)1243 0 Z 轴的背隙补偿量(BLU)1244 0 第四轴的背隙补偿量(BLU)1245 0 第五轴的背隙补偿量(BLU)1246 0 第六轴的背隙补偿量(BLU)1301 0 启动X 轴齿节误差补偿(0:无;1:单向;2:双向) 1302 0 启动Y 轴齿节误差补偿(0:无;1:单向;2:双向) 1303 0 启动Z 轴齿节误差补偿(0:无;1:单向;2:双向) 1304 0 启动第四轴齿节误差补偿(0:无;1:单向;2:双向) 1305 0 启动第五轴齿节误差补偿(0:无;1:单向;2:双向) 1306 0 启动第六轴齿节误差补偿(0:无;1:单向;2:双向) 1321 50000 X 轴齿节误差补偿节距长度(BLU)1322 50000 Y 轴齿节误差补偿节距长度(BLU)1323 50000 Z 轴齿节误差补偿节距长度(BLU)1324 50000 第四轴齿节误差补偿节距长度(BLU)1325 50000 第五轴齿节误差补偿节距长度(BLU)1326 50000 第六轴齿节误差补偿节距长度(BLU)1341 50 X 轴原点在补偿表的位置编号1342 50 Y 轴原点在补偿表的位置编号1343 50 Z 轴原点在补偿表的位置编号1344 50 第四轴原点在补偿表的位置编号1345 50 第五轴原点在补偿表的位置编号1346 50 第六轴轴原点在补偿表的位置编号1361 0 X 轴圆弧尖角正向补偿量(BLU)1362 0 Y 轴圆弧尖角正向补偿量(BLU)1363 0 Z 轴圆弧尖角正向补偿量(BLU)1364 0 第四轴圆弧尖角正向补偿量(BLU)1365 0 第五轴圆弧尖角正向补偿量(BLU)1366 0 第六轴圆弧尖角正向补偿量(BLU)1381 30 X 轴圆弧尖角补偿时间常数(ms)1382 30 Y 轴圆弧尖角补偿时间常数(ms)1383 30 Z 轴圆弧尖角补偿时间常数(ms)1384 30 第四轴圆弧尖角补偿时间常数(ms)1385 30 第五轴圆弧尖角补偿时间常数(ms)1386 30 第六轴圆弧尖角补偿时间常数(ms)1401 0 X 轴机构补偿时间常数(ms)1402 0 Y 轴机构补偿时间常数(ms)1403 0 Z 轴机构补偿时间常数(ms)1404 0 第四轴机构补偿时间常数(ms)1405 0 第五轴机构补偿时间常数(ms)1406 0 第六轴机构补偿时间常数(ms)1421 10000 X 轴静态最大双回授误差(BLU)1422 10000 Y 轴静态最大双回授误差(BLU)1423 10000 Z 轴静态最大双回授误差(BLU)1424 10000 第四轴静态最大双回授误差(BLU)1425 10000 第五轴静态最大双回授误差(BLU)1426 10000 第六轴静态最大双回授误差(BLU)1441 0 X 轴圆弧尖角负向补偿量(BLU)1442 0 Y 轴圆弧尖角负向补偿量(BLU)1443 0 Z 轴圆弧尖角负向补偿量(BLU)1444 0 第四轴圆弧尖角负向补偿量(BLU)1445 0 第五轴圆弧尖角负向补偿量(BLU)1446 0 第六轴圆弧尖角负向补偿量(BLU)1581 0 前馈补偿时间常数(ms)1621 4 *第一主轴所对应的伺服轴或轴向轴1622 0 *第二主轴所对应的伺服轴或轴向轴1631 0 第一主轴零速OFFSET速度(0.1 mV) 1632 0 第二主轴零速OFFSET速度(0.1 mV) 1641 0 第一主轴编码器极性(0:正;1:负)1642 0 第二主轴编码器极性(0:正;1:负)1651 1000 第一主轴马达编码器一转的Pulse数1652 1000 第二主轴马达编码器一转的Pulse数1661 4 第一主轴的回授倍频1662 4 第二主轴的回授倍频1671 1800 第一主轴马达的增益(RPM/V)1672 200 第二主轴马达的增益(RPM/V)1681 1 第一主轴第一档螺杆侧齿数1682 1 第一主轴第一档马达侧齿数1683 1 第二主轴第一档螺杆侧齿数1684 1 第二主轴第一档马达侧齿数1711 0 *第一主轴是否安装编码器(0:否;1:是) 1712 0 *第二主轴是否安装编码器(0:否;1:是) 1721 10 第一主轴寸动速度(RPM)1722 10 第二主轴寸动速度(RPM)1731 100 第一主轴最低转速(RPM)1732 100 第二主轴最低转速(RPM)1741 50 第一主轴定位速度(RPM)1742 50 第二主轴定位速度(RPM)1751 0 第一主轴定位偏移量(0.001deg)1752 0 第二主轴定位偏移量(0.001deg)1761 1000 第一主轴定位减速时间(ms)1762 1000 第二主轴定位减速时间(ms)1771 0 第一主轴原点偏移量(0.001deg)1772 0 第二主轴原点偏移量(0.001deg)1781 0 第一主轴定位最低速度(RPM)1782 0 第二主轴定位最低速度(RPM)1791 0 *第一主轴马达型态(0:变频;1:P主轴;2:V主轴;3:伺服) 1792 0 *第二主轴马达型态(0:变频;1:P主轴;2:V主轴;3:伺服) 1801 17500 第一主轴最高转速(RPM)1802 8000 第二主轴最高转速(RPM)1811 0 第一主轴编码器安装位置(0:主轴侧;1:马达侧)1812 0 第二主轴编码器安装位置(0:主轴侧;1:马达侧)1821 0 第一主轴伺服微分增益1822 0 第二主轴伺服微分增益1831 0 第一主轴加减速时间(ms)1832 0 第二主轴加减速时间(ms)1841 0 第一主轴Y-Delta切换速度(RPM)1842 0 第二主轴Y-Delta切换速度(RPM)1851 150 第一主轴重力速度加减速时间(ms)1852 150 第二主轴重力速度加减速时间(ms)1901 1 第一主轴第二档螺杆侧齿数1902 1 第一主轴第二档马达侧齿数1903 1 第二主轴第二档螺杆侧齿数1904 1 第二主轴第二档马达侧齿数1921 1 第一主轴第三档螺杆侧齿数1922 1 第一主轴第三档马达侧齿数1923 1 第二主轴第三档螺杆侧齿数1924 1 第二主轴第三档马达侧齿数1941 1 第一主轴第四档螺杆侧齿数1942 1 第一主轴第四档马达侧齿数1943 1 第二主轴第四档螺杆侧齿数1944 1 第二主轴第四档马达侧齿数2001 100 手轮第四段倍率(最小输入单位,LIU)2003 1 MPG程式模拟对应手轮号码2021 5 *设定一号手轮对应的伺服轴2022 0 *设定二号手轮对应的伺服轴2023 0 *设定三号手轮对应的伺服轴2031 0 一号手轮对应的轴向轴(0:MLC;1~6:轴向)2032 0 二号手轮对应的轴向轴(0:MLC;1~6:轴向)2033 0 三号手轮对应的轴向轴(0:MLC;1~6:轴向)2041 100 一号手轮解析度(Pulse/转)2042 100 二号手轮解析度(Pulse/转)2043 100 三号手轮解析度(Pulse/转)2051 4 一号手轮回授倍频2052 4 二号手轮回授倍频2053 4 三号手轮回授倍频2061 1 一号手轮螺杆侧齿数2062 1 一号手轮马达侧齿数2063 1 二号手轮螺杆侧齿数2064 1 二号手轮马达侧齿数2065 1 三号手轮螺杆侧齿数2066 1 三号手轮马达侧齿数2401 1000 X 轴第一软体行程正极限(BLU)(根据实际的机床距离设定)2402 -800000 X 轴第一软体行程负极限(BLU) (根据实际的机床距离设定)2403 2000 Y 轴第一软体行程正极限(BLU) (根据实际的机床距离设定)2404 -700000 Y 轴第一软体行程负极限(BLU) (根据实际的机床距离设定)2405 2000 Z 轴第一软体行程正极限(BLU) (根据实际的机床距离设定)2406 -300000 Z 轴第一软体行程负极限(BLU) (根据实际的机床距离设定)2407 999999999 第四轴第一软体行程正极限(BLU)2408 -999999999 第四轴第一软体行程负极限(BLU)2409 999999999 第五轴第一软体行程正极限(BLU)2410 -999999999 第五轴第一软体行程负极限(BLU)2411 999999999 第六轴第一软体行程正极限(BLU)2412 -999999999 第六轴第一软体行程负极限(BLU)2441 0 X 轴第二软体行程正极限(BLU)2442 0 X 轴第二软体行程负极限(BLU)2443 0 Y 轴第二软体行程正极限(BLU)2444 0 Y 轴第二软体行程负极限(BLU)2445 0 Z 轴第二软体行程正极限(BLU)2446 0 Z 轴第二软体行程负极限(BLU)2447 0 第四轴第二软体行程正极限(BLU)2448 0 第四轴第二软体行程负极限(BLU)2449 0 第五轴第二软体行程正极限(BLU)2450 0 第五轴第二软体行程负极限(BLU)2451 0 第六轴第二软体行程正极限(BLU)2452 0 第六轴第二软体行程负极限(BLU)2801 0 X 轴第二参考点机械座标(BLU)2802 0 Y 轴第二参考点机械座标(BLU)2803 0 Z 轴第二参考点机械座标(BLU)2804 0 第四轴第二参考点机械座标(BLU)2805 0 第五轴第二参考点机械座标(BLU)2806 0 第六轴第二参考点机械座标(BLU)2821 0 X 轴第三参考点机械座标(BLU)2822 0 Y 轴第三参考点机械座标(BLU)2823 0 Z 轴第三参考点机械座标(BLU)2824 0 第四轴第三参考点机械座标(BLU)2825 0 第五轴第三参考点机械座标(BLU)2826 0 第六轴第三参考点机械座标(BLU)2841 0 X 轴第四参考点机械座标(BLU)2842 0 Y 轴第四参考点机械座标(BLU)2843 0 Z 轴第四参考点机械座标(BLU)2844 0 第四轴第四参考点机械座标(BLU)2845 0 第五轴第四参考点机械座标(BLU)2846 0 第六轴第四参考点机械座标(BLU)3201 0 *启动车床规则(0:关闭;1:C;2:A:3:B)3202 2000 *I/O扫瞄时间(0.001 ms)3203 2000 *补间时间(0.001 ms)3204 8000 *PLC扫瞄时间(0.001 ms)3205 1 *功能键型态(0:5个键;1:8个键;2:触控)3207 1 *C/S界面版本编号(1:百分比;2:段数)3209 1 *Language(0:English;1:Chinese;2:Local;3:Simplified) 3211 0 *使用单色萤幕(0:彩色;1:单色)3213 3 磁碟机代号(0:A;1:B;2:D;3:N)3215 0 *选刀时呼叫模式(0:一般;1:副程;2:巨集)3217 0 *控制键盘型态3219 3 *系统安装组态(0:NoSRAM;1:SRAM;2:HardDisk;3:CFCard) 3221 0 除错模式(0:一般;1:应用;2:系统)3223 1 启动系统管理功能(0:关闭;1:启动)3225 0 *萤幕保护功能延迟时间(分,0:关闭)3227 0 *萤幕解析度(0:640x480;1:800x600)3229 0 关闭工件座标功能(0:启动;1:关闭)3230 0 关闭车床刀长设定画面(0:启动;1:关闭)3231 0 *COM1远端装置型态(0:No;1:FX2;2:视觉;3:FX2-V2)3232 0 *COM2远端装置型态(0:No;1:FX2;2:视觉;3:FX2-V2)3236 0 *网路局号(0:关闭;1-31:网路局号)3237 1024 *公布资料起始R暂存器编号3238 0 *公布资料R暂存器长度3241 0 *工件程式小数点型态(0:标准;1:计算机)3243 0 *键盘重置键由PLC处理(0:人机;1:PLC)3245 1000 刀长补偿输入增量最大值(BLU)3247 0 速率显示方式(0:mm/min;1:m/min)3251 0 *触摸式萤幕型态(0:无;1:PenMount)3252 25 *触摸式萤幕Xmin3253 996 *触摸式萤幕Xmax3254 28 *触摸式萤幕Ymin3255 1006 *触摸式萤幕Ymax3401 0 MLC暂存器81(设置为R81=100 进给、模式等为键盘控制)3402 0 MLC暂存器823403 0 MLC暂存器833404 0 MLC暂存器843405 1000 MLC暂存器85(设置注油器注油关的时间)3406 83805 MLC暂存器86(设置注油器注油开的时间)3407 0 MLC暂存器873408 0 MLC暂存器883409 0 MLC暂存器893410 0 MLC暂存器90 (对刀次数设定)3411 0 MLC暂存器913412 0 MLC暂存器923413 0 MLC暂存器933414 0 MLC暂存器943415 0 MLC暂存器953416 0 MLC暂存器963417 0 MLC暂存器973418 0 MLC暂存器983419 0 MLC暂存器993420 0 MLC暂存器1003601 0 *M码呼叫巨集登录表编号13602 0 *M码呼叫巨集登录表编号23603 0 *M码呼叫巨集登录表编号33604 0 *M码呼叫巨集登录表编号43605 0 *M码呼叫巨集登录表编号53606 0 *M码呼叫巨集登录表编号63607 0 *M码呼叫巨集登录表编号73608 0 *M码呼叫巨集登录表编号83609 0 *M码呼叫巨集登录表编号93610 0 *M码呼叫巨集登录表编号103701 0 *G码呼叫巨集登录表编号13702 0 *G码呼叫巨集登录表编号23703 0 *G码呼叫巨集登录表编号33704 0 *G码呼叫巨集登录表编号43705 0 *G码呼叫巨集登录表编号53706 0 *G码呼叫巨集登录表编号63707 0 *G码呼叫巨集登录表编号73708 0 *G码呼叫巨集登录表编号83709 0 *G码呼叫巨集登录表编号93710 0 *G码呼叫巨集登录表编号103801 0 G95时进给量与主轴位置紧密偶合3802 1 内定高精控制模式(0:G64;1:G62;2:G62.1)3804 99 工件计数M码编号3805 1000 静态双回授误差检查时间(ms)3807 5 圆弧终点不在圆弧上检查视窗(BLU)3809 0 *是否UVW为XYZ轴增量命令(0:否;1:是)3810 0 *启动同一单节M code同时执行功能(0:否;1:是)3811 0 *公用变数永久保留区起始位置3813 0 *扩充型公用变数数目3815 0 刀具半径补偿预看模式(0:否;1:是)3816 0 刀长补偿模式(0:Z;1:单轴;2:多轴)3817 10000 严重双回授误差(BLU)3819 1 过切检查模式(0:关闭;1:检查;2:修正)3821 0 *第一组轴偶合主动轴轴号3822 0 *第一组轴偶合跟随轴轴号3823 1 *第一组轴偶合主动轴分量3824 0 *第一组轴偶合跟随轴分量3825 0 *第一组轴偶合偶合型态(0:不;1:机;2:对同;3:载;;2:主同) 3826 0 第一组轴偶合偶合时间(ms)3827 0 第一组轴偶合分离时间(ms)3831 1000 *放电解析度(0.001us)3832 0 *放电延迟时间3841 0 刀具量测Z+接触面座标(BLU)3842 0 刀具量测Z-接触面座标(BLU)3843 0 刀具量测X+接触面座标(BLU)3844 0 刀具量测X-接触面座标(BLU)3851 999900 断刀处理程式号码(0不启动)3861 0 *第二组轴偶合主动轴轴号3862 0 *第二组轴偶合跟随轴轴号3863 1 *第二组轴偶合主动轴分量3864 0 *第二组轴偶合跟随轴分量3865 0 *第二组轴偶合偶合型态(0:不;1:机;2:对同;3:载;;2:主同) 3866 0 第二组轴偶合偶合时间(ms)3867 0 第二组轴偶合分离时间(ms)3871 0 *第三组轴偶合主动轴轴号3872 0 *第三组轴偶合跟随轴轴号3873 1 *第三组轴偶合主动轴分量3874 0 *第三组轴偶合跟随轴分量3875 0 *第三组轴偶合偶合型态(0:不;1:机;2:对同;3:载;;2:主同) 3876 0 第三组轴偶合偶合时间(ms)3877 0 第三组轴偶合分离时间(ms)3881 0 *第四组轴偶合主动轴轴号3882 0 *第四组轴偶合跟随轴轴号3883 1 *第四组轴偶合主动轴分量3884 0 *第四组轴偶合跟随轴分量3885 0 *第四组轴偶合偶合型态(0:不;1:机;2:对同;3:载;;2:主同) 3886 0 第四组轴偶合偶合时间(ms)3887 0 第四组轴偶合分离时间(ms)3901 0 主从模式(0:控制器;1:周边或PC)3903 1 档案传输通讯埠位置(1:第一埠;2:第二埠)3905 1 巨集程式通讯埠位置(1:第一埠;2:第二埠)3921 3 第一埠速度(0:24;1:48;2:96;3:192;4:384;5:576;6:1152) 3922 8 第一埠资料位元数3923 0 第一埠交换码格式(0:ASCII;1:EIA;2:ISO)3924 0 第一埠周边控制方式(0:No;1:DC2;2:DC4;3:DC2DC4)3925 0 第一埠单节结束(EOB)输出方式(0:EOB;1:CR+EOB)3926 0 第一埠DC3周边控制码是否同位(0:否;1:同位)3927 1 第一埠流量控制方式(0:无;1:硬体;2:软体;3:RS485)3928 0 第一埠同位检查方式(0:无;1:奇;2:偶)3929 1 第一埠停止位元数(1:1位元;2:2位元)3941 3 第二埠速度(0:24;1:48;2:96;3:192;4:384;5:576;6:1152) 3942 8 第二埠资料位元数3943 0 第二埠交换码格式(0:ASCII;1:EIA;2:ISO)3944 0 第二埠周边控制方式(0:No;1:DC2;2:DC4;3:DC2DC4)3945 0 第二埠单节结束(EOB)输出方式(0:EOB;1:CR+EOB)3946 0 第二埠DC3周边控制码是否同位(0:否;1:同位) 3947 1 第二埠流量控制方式(0:无;1:硬体;2:软体;3:RS485) 3948 0 第二埠同位检查方式(0:无;1:奇;2:偶)3949 1 第二埠停止位元数(1:1位元;2:2位元)8001~9200 0 轴齿节误差绝对补偿量正向表编号1~100使用者参数:4001 0 设定啄钻型态(0:一般;1:高速)4002 5000 设定钻孔循环退刀量(LIU)4004 0 设定攻牙循环退刀量(LIU)4010 50 铣削循环平面进给量百分比4020 0 设定塘孔主轴停止方向(0:X+,X-,Y+,Y-)。
新代系统22ma主轴定位参数

新代系统22ma主轴定位参数随着工业技术的发展,机械设备也不断更新迭代。
在机械加工领域中,主轴定位是一项非常重要的参数。
新代系统22ma主轴定位参数是指在新代系统22ma主板控制下,对主轴进行定位时所需要的参数。
下面将详细介绍新代系统22ma主轴定位参数。
首先,新代系统22ma主轴定位参数中的一个重要参数是位置误差。
位置误差是指定位运动中实际位置与理论位置之间的差值。
通常用毫米或微米作为单位来表示。
位置误差会受到多种因素的影响,如机床刚度、主轴轴承质量、切削力等。
减小位置误差可以通过提高机床刚度、优化主轴设计等方式来实现。
其次,新代系统22ma主轴定位参数中还包括速度误差。
速度误差是指在定位运动过程中实际速度与理论速度之间的差值。
同样,速度误差也会受到多种因素的影响,如主轴传动系统、伺服系统的响应速度等。
减小速度误差可以通过提高主轴传动系统的刚度、加快伺服系统的响应速度等方式来实现。
此外,新代系统22ma主轴定位参数中还包括加速度误差。
加速度误差是指在主轴加速或减速过程中实际加速度与理论加速度之间的差值。
加速度误差同样会受到多种因素的影响,如主轴承刚度、主轴驱动系统的响应时间等。
减小加速度误差可以通过提高主轴承刚度、优化主轴驱动系统等方式来实现。
此外,新代系统22ma主轴定位参数还包括回转误差。
回转误差是指在主轴旋转过程中实际回转角度与理论回转角度之间的差值。
回转误差同样会受到多种因素的影响,如主轴轴承刚度、主轴驱动系统的稳定性等。
减小回转误差可以通过提高主轴轴承刚度、优化主轴驱动系统等方式来实现。
此外,新代系统22ma主轴定位参数还包括振动和噪音等方面的参数。
振动和噪音是主轴运转过程中产生的不良影响。
减小振动和噪音可以通过优化主轴设计、增强主轴刚度等方式来实现。
综上所述,新代系统22ma主轴定位参数是一个综合考虑各种因素的指标,对机械加工领域的精密定位非常重要。
通过合理设计和优化主轴,可以实现更加精准的工件加工,提高生产效率和产品质量。
新代系统标准参数

新代系统标准参数新代系统标准参数(供参考)Model: 900ME Version: 10.69Modification Date: 2006/09/24 Time: 15:08:16 Model: 900ME Version: 10.69Modification Date: 2006/09/24 Time: 15:08:16No Value Title1 800 *设定第一轴轴板基址3 512 *设定第一轴IO板基址5 7 *IO板组态(0:EIO;1:H+3R1;2:H+R2+2R1;3:2R2+4R1)9 3 *轴板型态(0:E2;1:S4;2:S4+A;3:S4+B;4:E4;5:S6)10 0 *伺服警报接点型态(0:A;1:B;S6卡)11 2 *轴板时脉来源(0:轴板;1:Bus;2:VIA)12 400 *Servo6轴板最高时脉(Kpps)13 1 *设定轴板数目15 3 I/O板数位滤波程度17 2 *设定控制精度,BLU(1:条;2:微米;3:次微米)21 1 *设定X 轴对应的伺服轴22 2 *设定Y 轴对应的伺服轴23 3 *设定Z 轴对应的伺服轴24 0 *设定第四轴对应的伺服轴25 0 *设定第五轴对应的伺服轴26 0 *设定第六轴对应的伺服轴41 1 X 轴运动方向反向(0:正 1:反)42 0 Y 轴运动方向反向(0:正 1:反)43 1 Z 轴运动方向反向(0:正 1:反)44 0 第四轴运动方向反向45 0 第五轴运动方向反向46 0 第六轴运动方向反向61 4000 X 轴感应器解析度(编:次/转;光:次/mm)62 4000 Y 轴感应器解析度(编:次/转;光:次/mm)63 4000 Z 轴感应器解析度(编:次/转;光:次/mm)64 2500 第四轴感应器解析度(编:次/转;光:次/mm)65 2500 第五轴感应器解析度(编:次/转;光:次/mm)66 2500 第六轴感应器解析度(编:次/转;光:次/mm)81 4 X 轴的回授倍频82 4 Y 轴的回授倍频83 4 Z 轴的回授倍频84 4 第四轴的回授倍频85 4 第五轴的回授倍频86 4 第六轴的回授倍频101 200 X 轴马达的增益(RPM/V)102 200 Y 轴马达的增益(RPM/V)103 200 Z 轴马达的增益(RPM/V)104 200 第四轴马达的增益(RPM/V)105 200 第五轴马达的增益(RPM/V)106 200 第六轴马达的增益(RPM/V)121 1 X 轴螺杆侧齿数122 1 X 轴马达侧齿数123 1 Y 轴螺杆侧齿数124 1 Y 轴马达侧齿数125 1 Z 轴螺杆侧齿数126 1 Z 轴马达侧齿数127 1 第四轴螺杆侧齿数128 1 第四轴马达侧齿数129 1 第五轴螺杆侧齿数130 1 第五轴马达侧齿数131 1 第六轴螺杆侧齿数132 1 第六轴马达侧齿数161 10000 X 轴的PITCH(BLU)162 10000 Y 轴的PITCH(BLU)163 10000 Z 轴的PITCH(BLU)164 5000 第四轴的PITCH(BLU)165 5000 第五轴的PITCH(BLU)166 5000 第六轴的PITCH(BLU)181 120 X 轴伺服系统的回路增益(1/sec)182 120 Y 轴伺服系统的回路增益(1/sec)183 120 Z 轴伺服系统的回路增益(1/sec)184 30 第四轴伺服系统的回路增益(1/sec) 185 30 第五轴伺服系统的回路增益(1/sec) 186 30 第六轴伺服系统的回路增益(1/sec) 201 0 *X 轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对)202 0 *Y 轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对)203 0 *Z 轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对)204 0 *第四轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对)205 0 *第五轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对)206 0 *第六轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对)221 0 X 轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)222 0 Y 轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)223 0 Z 轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)224 0 第四轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)225 0 第五轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)226 0 第六轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)241 0 *设定X 轴位置双回授对应机械轴242 0 *设定Y 轴位置双回授对应机械轴243 0 *设定Z 轴位置双回授对应机械轴244 0 *设定第四轴位置双回授对应机械轴245 0 *设定第五轴位置双回授对应机械轴246 0 *设定第六轴位置双回授对应机械轴261 250 X 轴位置双回授解析度(编:次/转;光:次/mm)262 250 Y 轴位置双回授解析度(编:次/转;光:次/mm) 263 250 Z 轴位置双回授解析度(编:次/转;光:次/mm) 264 250 第四轴位置双回授解析度(编:次/转;光:次/mm) 265 250 第五轴位置双回授解析度(编:次/转;光:次/mm) 266 250 第六轴位置双回授解析度(编:次/转;光:次/mm) 281 0 X 轴直径轴或半径轴(0:半径轴;1:直径轴)282 0 Y 轴直径轴或半径轴(0:半径轴;1:直径轴)283 0 Z 轴直径轴或半径轴(0:半径轴;1:直径轴)284 0 第四轴直径轴或半径轴(0:半径轴;1:直径轴)285 0 第五轴直径轴或半径轴(0:半径轴;1:直径轴)286 0 第六轴直径轴或半径轴(0:半径轴;1:直径轴)301 4 X 轴位置双回授回授倍频302 4 Y 轴位置双回授回授倍频303 4 Z 轴位置双回授回授倍频304 4 第四轴位置双回授回授倍频305 4 第五轴位置双回授回授倍频306 4 第六轴位置双回授回授倍频321 100 *X 轴名称322 200 *Y 轴名称323 300 *Z 轴名称324 400 *第四轴轴名称325 500 *第五轴轴名称326 600 *第六轴轴名称341 1 X 轴命令倍率分子342 1 Y 轴命令倍率分子343 1 Z 轴命令倍率分子344 1 第四轴命令倍率分子345 1 第五轴命令倍率分子346 1 第六轴命令倍率分子361 1 X 轴命令倍率分母362 1 Y 轴命令倍率分母363 1 Z 轴命令倍率分母364 1 第四轴命令倍率分母365 1 第五轴命令倍率分母366 1 第六轴命令倍率分母381 2 *X 轴位置伺服方式(0:CW;1:电压;2:AB)382 2 *Y 轴位置伺服方式(0:CW;1:电压;2:AB)383 2 *Z 轴位置伺服方式(0:CW;1:电压;2:AB)384 2 *第四轴位置伺服方式(0:CW;1:电压;2:AB)385 2 *第五轴位置伺服方式(0:CW;1:电压;2:AB)386 2 *第六轴位置伺服方式(0:CW;1:电压;2:AB)401 250 切削时的加减速时间(ms)402 150 重力加速度加减速时间(ms)404 10 后加减速切削钟型加减速时间(ms)405 5000 切削时的最高速度(mm/min)406 500 转角参考速度(mm/min)408 1500 半径5mm圆弧切削参考速度(mm/min) 409 10 螺牙切削时的 1m/min加减速时间(ms) 410 200 手轮加减速时间(ms) 411 0 G00运动方式(0:线性;1:各轴独立)413 0 G92座标座标保留模式(0:否;1:重置;2:关机)414 0 工件座标系统保留模式(0:否;1:重置;2:关机)415 0 *重置或关机时保留目前刀长资料(0:否;1:是)416 1000 刚性攻牙偶合时间(0.001 rev)417 0 刚性攻牙速度回路增益418 0 刚性攻牙加速度回路增益419 0 刚性攻牙主轴减速时间(ms)421 30 X 轴切削位置检查视窗(BLU)422 30 Y 轴切削位置检查视窗(BLU)423 30 Z 轴切削位置检查视窗(BLU)424 30 第四轴切削位置检查视窗(BLU)425 30 第五轴切削位置检查视窗(BLU)426 30 第六轴切削位置检查视窗(BLU)441 200 X 轴快速移动时(G00)的加减速时间(ms)442 200 Y 轴快速移动时(G00)的加减速时间(ms)443 200 Z 轴快速移动时(G00)的加减速时间(ms)444 200 第四轴快速移动时(G00)的加减速时间(ms)445 200 第五轴快速移动时(G00)的加减速时间(ms)446 200 第六轴快速移动时(G00)的加减速时间(ms)461 12000 X 轴快速移动最高速度(mm/min)462 12000 Y 轴快速移动最高速度(mm/min)463 10000 Z 轴快速移动最高速度(mm/min)464 5000 第四轴快速移动最高速度(deg/min) 465 5000 第五轴快速移动最高速度(deg/min) 466 5000 第六轴快速移动最高速度(deg/min) 481 30 X 轴快速移动位置检查视窗(BLU)482 30 Y 轴快速移动位置检查视窗(BLU)483 30 Z 轴快速移动位置检查视窗(BLU)484 30 第四轴快速移动位置检查视窗(BLU) 485 30 第五轴快速移动位置检查视窗(BLU) 486 30 第六轴快速移动位置检查视窗(BLU) 501 0 X 轴快速移动F0速度(mm/min)502 0 Y 轴快速移动F0速度(mm/min)503 0 Z 轴快速移动F0速度(mm/min)504 0 第四轴快速移动F0速度(deg/min)505 0 第五轴快速移动F0速度(deg/min)506 0 第六轴快速移动F0速度(deg/min) 521 5000 X 轴JOG 速度(mm/min)522 5000 Y 轴JOG 速度(mm/min)523 4000 Z 轴JOG 速度(mm/min)524 6000 第四轴JOG 速度(deg/min)525 6000 第五轴JOG 速度(deg/min)526 6000 第六轴JOG 速度(deg/min)541 100 X 轴切削加减速时间(ms)542 100 Y 轴切削加减速时间(ms)543 100 Z 轴切削加减速时间(ms)544 100 第四轴切削加减速时间(ms)545 100 第五轴切削加减速时间(ms)546 100 第六轴切削加减速时间(ms)561 100 X 轴遗失位置检查视窗(0.001 mm)562 100 Y 轴遗失位置检查视窗(0.001 mm) 563 100 Z 轴遗失位置检查视窗(0.001 mm) 564 100 第四轴遗失位置检查视窗(0.001 mm) 565 100 第五轴遗失位置检查视窗(0.001 mm) 566 100 第六轴遗失位置检查视窗(0.001 mm) 581 0 X 轴速度前馈补偿百分比582 0 Y 轴速度前馈补偿百分比583 0 Z 轴速度前馈补偿百分比584 0 第四轴速度前馈补偿百分比585 0 第五轴速度前馈补偿百分比586 0 第六轴速度前馈补偿百分比601 3600000 X 轴转角参考速度(mm/min)602 3600000 Y 轴转角参考速度(mm/min)603 3600000 Z 轴转角参考速度(mm/min)604 3600000 第四轴转角参考速度(mm/min)605 3600000 第五轴转角参考速度(mm/min)606 3600000 第六轴转角参考速度(mm/min)621 5000 X 轴切削时的最高速度(mm/min)622 5000 Y 轴切削时的最高速度(mm/min)623 5000 Z 轴切削时的最高速度(mm/min)624 5000 第四轴切削时的最高速度(mm/min) 625 5000 第五轴切削时的最高速度(mm/min) 626 5000 第六轴切削时的最高速度(mm/min) 641 0 X轴重力加速度加减速时间(ms)642 0 Y轴重力加速度加减速时间(ms)643 0 Z轴重力加速度加减速时间(ms)644 0 第四轴重力加速度加减速时间(ms) 645 0 第五轴重力加速度加减速时间(ms) 646 0 第六轴重力加速度加减速时间(ms) 701 1 *X 轴所属轴群702 1 *Y 轴所属轴群703 1 *Z 轴所属轴群704 1 *第四轴所属轴群705 1 *第五轴所属轴群706 1 *第六轴所属轴群721 1 *第一轴群对应的MST通道722 1 *第二轴群对应的MST通道723 1 *第三轴群对应的MST通道724 1 *第四轴群对应的MST通道731 2 *CNC主系统轴群数目803 0 *Home Dog来源(0:I/O; 1:轴卡)821 1500 X 轴寻原点速度(mm/min)822 1500 Y 轴寻原点速度(mm/min)823 1500 Z 轴寻原点速度(mm/min)824 5000 第四轴寻原点速度(deg/min)825 5000 第五轴寻原点速度(deg/min)826 5000 第六轴寻原点速度(deg/min)841 500 X 轴寻原点的第二段低速速度(mm/min)842 500 Y 轴寻原点的第二段低速速度(mm/min)843 500 Z 轴寻原点的第二段低速速度(mm/min)844 2000 第四轴寻原点的第二段低速速度(deg/min)845 2000 第五轴寻原点的第二段低速速度(deg/min)846 2000 第六轴寻原点的第二段低速速度(deg/min)861 0 X 轴寻原点方向为负方向(0:正方向1:负方向)862 0 Y 轴寻原点方向为负方向(0:正方向1:负方向)863 0 Z 轴寻原点方向为负方向(0:正方向1:负方向)864 0 第四轴寻原点方向为负方向865 0 第五轴寻原点方向为负方向866 0 第六轴寻原点方向为负方向881 0 X 轴寻原点的偏移量(BLU)882 0 Y 轴寻原点的偏移量(BLU)883 0 Z 轴寻原点的偏移量(BLU)884 0 第四轴寻原点的偏移量(BLU)885 0 第五轴寻原点的偏移量(BLU)886 0 第六轴寻原点的偏移量(BLU)901 3 X 轴零速检查视窗(count)902 3 Y 轴零速检查视窗(count)903 3 Z 轴零速检查视窗(count)904 3 第四轴零速检查视窗(count)905 3 第五轴零速检查视窗(count)906 3 第六轴零速检查视窗(count)921 0 X 轴Home Dog极性(0:正;1:负)922 0 Y 轴Home Dog极性(0:正;1:负)923 0 Z 轴Home Dog极性(0:正;1:负)924 0 第四轴Home Dog极性(0:正;1:负)925 0 第五轴Home Dog极性(0:正;1:负)926 0 第六轴Home Dog极性(0:正;1:负)941 0 启动X 轴寻原点栅格功能(0:关闭;1:启动)942 0 启动Y 轴寻原点栅格功能(0:关闭;1:启动)943 0 启动Z 轴寻原点栅格功能(0:关闭;1:启动)944 0 启动第四轴寻原点栅格功能(0:关闭;1:启动)945 0 启动第五轴寻原点栅格功能(0:关闭;1:启动)946 0 启动第六轴寻原点栅格功能(0:关闭;1:启动)961 0 设X 轴寻原点方法(0:DOG;1:索引;2:DOG+预设) 962 0 设Y 轴寻原点方法(0:DOG;1:索引;2:DOG+预设) 963 0 设Z 轴寻原点方法(0:DOG;1:索引;2:DOG+预设)964 0 设第四轴寻原点方法(0:DOG;1:索引;2:DOG+预设)965 0 设第五轴寻原点方法(0:DOG;1:索引;2:DOG+预设)966 0 设第六轴寻原点方法(0:DOG;1:索引;2:DOG+预设)1221 0 X 轴启动背隙补偿功能(0:关闭 1:启动)1222 0 Y 轴启动背隙补偿功能(0:关闭 1:启动)1223 0 Z 轴启动背隙补偿功能(0:关闭 1:启动)1224 0 第四轴启动背隙补偿功能1225 0 第五轴启动背隙补偿功能1226 0 第六轴启动背隙补偿功能1241 5 X 轴的背隙补偿量(BLU)1242 5 Y 轴的背隙补偿量(BLU)1243 0 Z 轴的背隙补偿量(BLU)1244 0 第四轴的背隙补偿量(BLU)1245 0 第五轴的背隙补偿量(BLU)1246 0 第六轴的背隙补偿量(BLU)1301 0 启动X 轴齿节误差补偿(0:无;1:单向;2:双向)1302 0 启动Y 轴齿节误差补偿(0:无;1:单向;2:双向)1303 0 启动Z 轴齿节误差补偿(0:无;1:单向;2:双向)1304 0 启动第四轴齿节误差补偿(0:无;1:单向;2:双向)1305 0 启动第五轴齿节误差补偿(0:无;1:单向;2:双向)1306 0 启动第六轴齿节误差补偿(0:无;1:单向;2:双向)1321 50000 X 轴齿节误差补偿节距长度(BLU) 1322 50000 Y 轴齿节误差补偿节距长度(BLU) 1323 50000 Z 轴齿节误差补偿节距长度(BLU) 1324 50000 第四轴齿节误差补偿节距长度(BLU) 1325 50000 第五轴齿节误差补偿节距长度(BLU) 1326 50000 第六轴齿节误差补偿节距长度(BLU) 1341 50 X 轴原点在补偿表的位置编号1342 50 Y 轴原点在补偿表的位置编号1343 50 Z 轴原点在补偿表的位置编号1344 50 第四轴原点在补偿表的位置编号1345 50 第五轴原点在补偿表的位置编号1346 50 第六轴轴原点在补偿表的位置编号1361 0 X 轴圆弧尖角正向补偿量(BLU) 1362 0 Y 轴圆弧尖角正向补偿量(BLU) 1363 0 Z 轴圆弧尖角正向补偿量(BLU) 1364 0 第四轴圆弧尖角正向补偿量(BLU) 1365 0 第五轴圆弧尖角正向补偿量(BLU) 1366 0 第六轴圆弧尖角正向补偿量(BLU) 1381 30 X 轴圆弧尖角补偿时间常数(ms) 1382 30 Y 轴圆弧尖角补偿时间常数(ms) 1383 30 Z 轴圆弧尖角补偿时间常数(ms) 1384 30 第四轴圆弧尖角补偿时间常数(ms) 1385 30 第五轴圆弧尖角补偿时间常数(ms) 1386 30 第六轴圆弧尖角补偿时间常数(ms) 1401 0 X 轴机构补偿时间常数(ms)1402 0 Y 轴机构补偿时间常数(ms)1403 0 Z 轴机构补偿时间常数(ms)1404 0 第四轴机构补偿时间常数(ms) 1405 0 第五轴机构补偿时间常数(ms) 1406 0 第六轴机构补偿时间常数(ms) 1421 10000 X 轴静态最大双回授误差(BLU) 1422 10000 Y 轴静态最大双回授误差(BLU) 1423 10000 Z 轴静态最大双回授误差(BLU)1424 10000 第四轴静态最大双回授误差(BLU) 1425 10000 第五轴静态最大双回授误差(BLU) 1426 10000 第六轴静态最大双回授误差(BLU) 1441 0 X 轴圆弧尖角负向补偿量(BLU)1442 0 Y 轴圆弧尖角负向补偿量(BLU)1443 0 Z 轴圆弧尖角负向补偿量(BLU)1444 0 第四轴圆弧尖角负向补偿量(BLU) 1445 0 第五轴圆弧尖角负向补偿量(BLU) 1446 0 第六轴圆弧尖角负向补偿量(BLU) 1581 0 前馈补偿时间常数(ms)1621 4 *第一主轴所对应的伺服轴或轴向轴1622 0 *第二主轴所对应的伺服轴或轴向轴1631 0 第一主轴零速OFFSET速度(0.1 mV) 1632 0 第二主轴零速OFFSET速度(0.1 mV) 1641 0 第一主轴编码器极性(0:正;1:负) 1642 0 第二主轴编码器极性(0:正;1:负) 1651 1000 第一主轴马达编码器一转的Pulse数1652 1000 第二主轴马达编码器一转的Pulse数1661 4 第一主轴的回授倍频1662 4 第二主轴的回授倍频1671 1800 第一主轴马达的增益(RPM/V)1672 200 第二主轴马达的增益(RPM/V)1681 1 第一主轴第一档螺杆侧齿数1682 1 第一主轴第一档马达侧齿数1683 1 第二主轴第一档螺杆侧齿数1684 1 第二主轴第一档马达侧齿数1711 0 *第一主轴是否安装编码器(0:否;1:是)1712 0 *第二主轴是否安装编码器(0:否;1:是)1721 10 第一主轴寸动速度(RPM)1722 10 第二主轴寸动速度(RPM)1731 100 第一主轴最低转速(RPM)1732 100 第二主轴最低转速(RPM)1741 50 第一主轴定位速度(RPM)1742 50 第二主轴定位速度(RPM)1751 0 第一主轴定位偏移量(0.001deg)1752 0 第二主轴定位偏移量(0.001deg)1761 1000 第一主轴定位减速时间(ms)1762 1000 第二主轴定位减速时间(ms)1771 0 第一主轴原点偏移量(0.001deg)1772 0 第二主轴原点偏移量(0.001deg)1781 0 第一主轴定位最低速度(RPM)1782 0 第二主轴定位最低速度(RPM)1791 0 *第一主轴马达型态(0:变频;1:P主轴;2:V主轴;3:伺服) 1792 0 *第二主轴马达型态(0:变频;1:P主轴;2:V主轴;3:伺服) 1801 17500 第一主轴最高转速(RPM)1802 8000 第二主轴最高转速(RPM)1811 0 第一主轴编码器安装位置(0:主轴侧;1:马达侧)1812 0 第二主轴编码器安装位置(0:主轴侧;1:马达侧)1821 0 第一主轴伺服微分增益1822 0 第二主轴伺服微分增益1831 0 第一主轴加减速时间(ms)1832 0 第二主轴加减速时间(ms)1841 0 第一主轴Y-Delta切换速度(RPM) 1842 0 第二主轴Y-Delta切换速度(RPM) 1851 150 第一主轴重力速度加减速时间(ms) 1852 150 第二主轴重力速度加减速时间(ms) 1901 1 第一主轴第二档螺杆侧齿数1902 1 第一主轴第二档马达侧齿数1903 1 第二主轴第二档螺杆侧齿数1904 1 第二主轴第二档马达侧齿数1921 1 第一主轴第三档螺杆侧齿数1922 1 第一主轴第三档马达侧齿数1923 1 第二主轴第三档螺杆侧齿数1924 1 第二主轴第三档马达侧齿数1941 1 第一主轴第四档螺杆侧齿数1942 1 第一主轴第四档马达侧齿数1943 1 第二主轴第四档螺杆侧齿数1944 1 第二主轴第四档马达侧齿数2001 100 手轮第四段倍率(最小输入单位,LIU) 2003 1 MPG程式模拟对应手轮号码2021 5 *设定一号手轮对应的伺服轴2022 0 *设定二号手轮对应的伺服轴2023 0 *设定三号手轮对应的伺服轴2031 0 一号手轮对应的轴向轴(0:MLC;1~6:轴向)2032 0 二号手轮对应的轴向轴(0:MLC;1~6:轴向)2033 0 三号手轮对应的轴向轴(0:MLC;1~6:轴向)2041 100 一号手轮解析度(Pulse/转)2042 100 二号手轮解析度(Pulse/转)2043 100 三号手轮解析度(Pulse/转)2051 4 一号手轮回授倍频2052 4 二号手轮回授倍频2053 4 三号手轮回授倍频2061 1 一号手轮螺杆侧齿数2062 1 一号手轮马达侧齿数2063 1 二号手轮螺杆侧齿数2064 1 二号手轮马达侧齿数2065 1 三号手轮螺杆侧齿数2066 1 三号手轮马达侧齿数2401 1000 X 轴第一软体行程正极限(BLU)(根据实际的机床距离设定)2402 -800000 X 轴第一软体行程负极限(BLU) (根据实际的机床距离设定)2403 2000 Y 轴第一软体行程正极限(BLU) (根据实际的机床距离设定)2404 -700000 Y 轴第一软体行程负极限(BLU) (根据实际的机床距离设定)2405 2000 Z 轴第一软体行程正极限(BLU) (根据实际的机床距离设定)2406 -300000 Z 轴第一软体行程负极限(BLU) (根据实际的机床距离设定)2407 999999999 第四轴第一软体行程正极限(BLU) 2408 -999999999 第四轴第一软体行程负极限(BLU) 2409 999999999 第五轴第一软体行程正极限(BLU) 2410 -999999999 第五轴第一软体行程负极限(BLU) 2411 999999999 第六轴第一软体行程正极限(BLU) 2412 -999999999 第六轴第一软体行程负极限(BLU) 2441 0 X 轴第二软体行程正极限(BLU)2442 0 X 轴第二软体行程负极限(BLU)2443 0 Y 轴第二软体行程正极限(BLU)2444 0 Y 轴第二软体行程负极限(BLU)2445 0 Z 轴第二软体行程正极限(BLU)2446 0 Z 轴第二软体行程负极限(BLU)2447 0 第四轴第二软体行程正极限(BLU) 2448 0 第四轴第二软体行程负极限(BLU) 2449 0 第五轴第二软体行程正极限(BLU) 2450 0 第五轴第二软体行程负极限(BLU) 2451 0 第六轴第二软体行程正极限(BLU) 2452 0 第六轴第二软体行程负极限(BLU) 2801 0 X 轴第二参考点机械座标(BLU)2802 0 Y 轴第二参考点机械座标(BLU)2803 0 Z 轴第二参考点机械座标(BLU)2804 0 第四轴第二参考点机械座标(BLU) 2805 0 第五轴第二参考点机械座标(BLU) 2806 0 第六轴第二参考点机械座标(BLU) 2821 0 X 轴第三参考点机械座标(BLU)2822 0 Y 轴第三参考点机械座标(BLU)2823 0 Z 轴第三参考点机械座标(BLU)2824 0 第四轴第三参考点机械座标(BLU)2825 0 第五轴第三参考点机械座标(BLU)2826 0 第六轴第三参考点机械座标(BLU)2841 0 X 轴第四参考点机械座标(BLU)2842 0 Y 轴第四参考点机械座标(BLU)2843 0 Z 轴第四参考点机械座标(BLU)2844 0 第四轴第四参考点机械座标(BLU)2845 0 第五轴第四参考点机械座标(BLU)2846 0 第六轴第四参考点机械座标(BLU)3201 0 *启动车床规则(0:关闭;1:C;2:A:3:B) 3202 2000 *I/O扫瞄时间(0.001 ms)3203 2000 *补间时间(0.001 ms)3204 8000 *PLC扫瞄时间(0.001 ms)3205 1 *功能键型态(0:5个键;1:8个键;2:触控)3207 1 *C/S界面版本编号(1:百分比;2:段数) 3209 1 *Language(0:English;1:Chinese;2:Local;3:Simplified) 3211 0 *使用单色萤幕(0:彩色;1:单色)3213 3 磁碟机代号(0:A;1:B;2:D;3:N)3215 0 *选刀时呼叫模式(0:一般;1:副程;2:巨集)3217 0 *控制键盘型态3219 3 *系统安装组态(0:NoSRAM;1:SRAM;2:HardDisk;3:CFCard)3221 0 除错模式(0:一般;1:应用;2:系统)3223 1 启动系统管理功能(0:关闭;1:启动)3225 0 *萤幕保护功能延迟时间(分,0:关闭) 3227 0 *萤幕解析度(0:640x480;1:800x600) 3229 0 关闭工件座标功能(0:启动;1:关闭) 3230 0 关闭车床刀长设定画面(0:启动;1:关闭)3231 0 *COM1远端装置型态(0:No;1:FX2;2:视觉;3:FX2-V2)3232 0 *COM2远端装置型态(0:No;1:FX2;2:视觉;3:FX2-V2)3236 0 *网路局号(0:关闭;1-31:网路局号) 3237 1024 *公布资料起始R暂存器编号3238 0 *公布资料R暂存器长度3241 0 *工件程式小数点型态(0:标准;1:计算机)3243 0 *键盘重置键由PLC处理(0:人机;1:PLC)3245 1000 刀长补偿输入增量最大值(BLU)3247 0 速率显示方式(0:mm/min;1:m/min) 3251 0 *触摸式萤幕型态(0:无;1:PenMount) 3252 25 *触摸式萤幕Xmin3253 996 *触摸式萤幕Xmax3254 28 *触摸式萤幕Ymin3255 1006 *触摸式萤幕Ymax3401 0 MLC暂存器81(设置为R81=100 进给、模式等为键盘控制)3402 0 MLC暂存器823403 0 MLC暂存器833404 0 MLC暂存器843405 1000 MLC暂存器85(设置注油器注油关的时间)3406 83805 MLC暂存器86(设置注油器注油开的时间)3407 0 MLC暂存器873408 0 MLC暂存器883409 0 MLC暂存器893410 0 MLC暂存器90 (对刀次数设定)3411 0 MLC暂存器91 3412 0 MLC暂存器923413 0 MLC暂存器933414 0 MLC暂存器943415 0 MLC暂存器953416 0 MLC暂存器963417 0 MLC暂存器973418 0 MLC暂存器983419 0 MLC暂存器993420 0 MLC暂存器1003601 0 *M码呼叫巨集登录表编号13602 0 *M码呼叫巨集登录表编号23603 0 *M码呼叫巨集登录表编号33604 0 *M码呼叫巨集登录表编号43605 0 *M码呼叫巨集登录表编号53606 0 *M码呼叫巨集登录表编号63607 0 *M码呼叫巨集登录表编号73608 0 *M码呼叫巨集登录表编号83609 0 *M码呼叫巨集登录表编号93610 0 *M码呼叫巨集登录表编号103701 0 *G码呼叫巨集登录表编号13702 0 *G码呼叫巨集登录表编号23703 0 *G码呼叫巨集登录表编号33704 0 *G码呼叫巨集登录表编号43705 0 *G码呼叫巨集登录表编号53706 0 *G码呼叫巨集登录表编号63707 0 *G码呼叫巨集登录表编号73708 0 *G码呼叫巨集登录表编号83709 0 *G码呼叫巨集登录表编号93710 0 *G码呼叫巨集登录表编号103801 0 G95时进给量与主轴位置紧密偶合3802 1 内定高精控制模式(0:G64;1:G62;2:G62.1)3804 99 工件计数M码编号3805 1000 静态双回授误差检查时间(ms)3807 5 圆弧终点不在圆弧上检查视窗(BLU) 3809 0 *是否UVW 为XYZ轴增量命令(0:否;1:是)3810 0 *启动同一单节M code同时执行功能(0:。
新代系统行程限位参数

新代系统行程限位参数
新代系统行程限位参数是指在机器运行过程中,设定的机器工作范围的最大值和最小值。
这些参数可以防止机器在运行过程中超出其工作范围,从而保证了机器的安全性和稳定性。
新代系统行程限位参数通常包括两个方面:软件限位和硬件限位。
软件限位是通过编写程序来控制机器的运动范围,以避免超出其工作范围。
硬件限位则是通过安装传感器或开关等设备来监测机器的位置,并在达到预设位置时停止运动。
对于不同类型的机器,其行程限位参数也会有所不同。
例如,在数控加工中心中,通常需要设置X、Y、Z三个方向的行程限位参数;而在激光切割机中,则需要设置X、Y两个方向的行程限位参数。
正确设置新代系统行程限位参数对于保证生产效率和生产质量至关重要。
如果没有正确设置这些参数,可能会导致以下问题:
1. 机器超出工作范围:如果没有正确设置行程限位参数,机器可能会超出其工作范围,导致零件加工不准确或损坏设备。
2. 安全事故:如果机器在运行过程中超出其工作范围,可能会导致安
全事故,造成人员伤害或设备损坏。
3. 生产效率低下:如果机器没有正确设置行程限位参数,可能会导致生产效率低下,因为操作员需要花费更多的时间来检查和调整机器的位置。
因此,正确设置新代系统行程限位参数对于保证机器的安全性、稳定性和生产效率至关重要。
在设置这些参数时,需要根据具体的机器类型和工作需求进行调整,并确保这些参数得到正确地保存和维护。
同时,在使用机器时也需要遵守相关的安全规定,并定期检查和维护设备。
新代系统c轴旋转指定值参数

新代系统c轴旋转指定值参数一、引言随着工业自动化的不断发展,用于控制机械设备的系统也在不断升级和更新。
新代系统C轴旋转指定值参数作为一种重要的控制参数,对于机械设备的精准性和稳定性起着至关重要的作用。
本文将对新代系统C轴旋转指定值参数进行详细的介绍和分析,以便更好地了解其作用和应用。
二、新代系统C轴旋转指定值参数介绍C轴是机床控制系统中的一个重要部分,它能够实现机床的旋转运动。
C轴旋转指定值参数是指在机床控制系统中,用户可以通过设置参数来指定C轴的旋转角度。
这个参数能够精确地控制C轴的旋转,使得机床能够实现更精准的加工。
新代系统C轴旋转指定值参数通常由数控系统控制,用户可以通过数控系统的人机界面来设置和修改这个参数。
在数控加工过程中,C轴旋转指定值参数会根据加工需求进行不断地调整,以确保机床能够按照设定的旋转角度进行加工操作。
三、新代系统C轴旋转指定值参数的作用C轴旋转指定值参数在机械加工中起着至关重要的作用,其作用主要体现在以下几个方面:1. 实现精准加工通过设置C轴旋转指定值参数,用户可以精确地控制机床的C轴旋转角度。
这样一来,机床就可以根据加工需求进行精确的旋转加工,提高了加工精度和产品质量。
2. 提高加工效率C轴旋转指定值参数的设置使得机床可以按照旋转角度进行加工操作,提高了加工效率。
在一些需要进行复杂旋转加工的工件中,通过设置C轴旋转指定值参数,可以减少加工次数和加工时间,从而提高了加工效率。
3. 实现多轴联动在一些复杂的机械加工任务中,C轴旋转指定值参数可以与其他轴的运动参数进行联动,实现多轴联动加工。
这样一来,机床就可以实现更复杂的加工操作,满足了一些复杂工件的加工需求。
四、设置新代系统C轴旋转指定值参数的方法为了更好地发挥C轴旋转指定值参数的作用,用户需要正确地设置这个参数。
设置C轴旋转指定值参数的方法主要包括以下几个步骤:1. 进入数控系统的设置界面用户需要通过数控系统的人机界面进入设置界面,以便设置C轴旋转指定值参数。
新代数控系统攻牙参数

新代数控系统攻牙参数随着科技的不断发展,新代数控系统在机械加工领域得到了广泛应用。
其中,攻牙是机械加工中常见的一种工艺。
攻牙是通过在工件上切割螺纹,使螺栓或螺母与工件互相嵌合,以实现连接的目的。
在新代数控系统中,攻牙参数的设置对于加工质量和效率起着至关重要的作用。
攻牙的参数之一是攻牙刀具的选择。
攻牙刀具是进行攻牙操作的工具,不同的攻牙刀具可以适用于不同类型的螺纹加工。
常见的攻牙刀具有螺纹攻、螺纹刀和螺纹机等。
在新代数控系统中,可以通过设定刀具的类型和尺寸来选择合适的攻牙刀具,以确保加工的准确性和效率。
攻牙参数中的攻牙速度也是需要注意的。
攻牙速度是指攻牙刀具在工件上运动的速度。
过高或过低的攻牙速度都会对加工质量产生不良影响。
因此,在新代数控系统中,需要根据工件材料的硬度和刀具的材质来设定合适的攻牙速度,以保证加工过程的稳定性和效率。
攻牙参数中的进给量也是需要考虑的因素之一。
进给量是指攻牙刀具在每转过程中在工件上移动的距离。
进给量的设置直接影响着攻牙的深度和效率。
如果进给量过大,容易导致切削力过大,加工过程中易产生振动和噪声;如果进给量过小,则会加长加工时间。
因此,在新代数控系统中,需要根据工件材料和攻牙刀具的特性来设定合适的进给量,以确保加工的稳定性和效率。
攻牙参数中的切削速度也需要注意。
切削速度是指攻牙刀具在切削过程中与工件接触的速度。
过高或过低的切削速度都会对加工质量产生不良影响。
在新代数控系统中,可以根据工件材料的硬度和刀具的特性来设定合适的切削速度,以确保加工的质量和效率。
攻牙参数中的冷却液的使用也是需要注意的。
冷却液在攻牙过程中起着冷却、润滑和清洁的作用。
通过冷却液的喷洒,可以有效降低攻牙刀具和工件的温度,减少切削热的产生,提高加工质量和刀具的使用寿命。
在新代数控系统中,可以通过设定冷却液的喷洒位置和喷洒量来实现冷却液的合理使用。
新代数控系统在攻牙参数的设定中起着重要作用。
通过合理选择攻牙刀具、设定攻牙速度、进给量、切削速度和冷却液的使用,可以实现高质量、高效率的攻牙加工。
新代系统高速高精参数
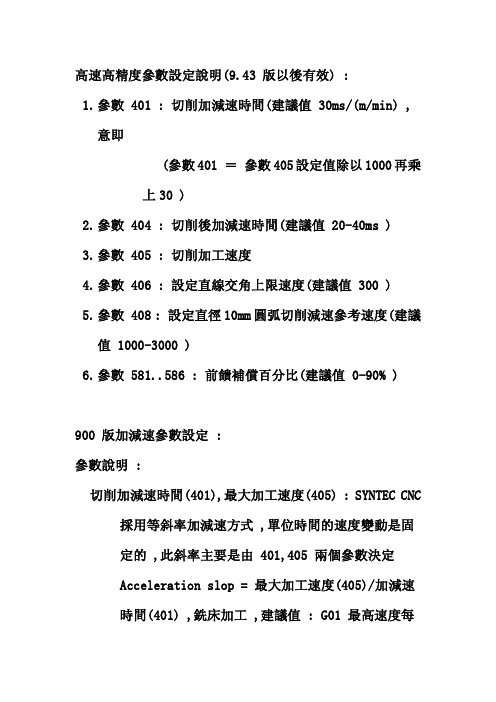
高速高精度參數設定說明(9.43版以後有效):1.參數401:切削加減速時間(建議值30ms/(m/min),意即(參數401=參數405設定值除以1000再乘上30)2.參數404:切削後加減速時間(建議值20-40ms)3.參數405:切削加工速度4.參數406:設定直線交角上限速度(建議值300)5.參數408:設定直徑10mm圓弧切削減速參考速度(建議值1000-3000)6.參數581..586:前饋補償百分比(建議值0-90%)900版加減速參數設定:參數說明:切削加減速時間(401),最大加工速度(405):SYNTEC CNC 採用等斜率加減速方式,單位時間的速度變動是固定的,此斜率主要是由401,405兩個參數決定Acceleration slop=最大加工速度(405)/加減速時間(401),銑床加工,建議值:G01最高速度每1m/min,加減速時間30msex:參數405加工速度設定10m/min,建議401設定300ms切削後加減速時間(404):SYNTEC CNC同時提供線性後加減速的方式,平滑馬達輸出指令,以達到速度平滑的效果,在3D曲面模式(G62),模具短block的加工場合,因為短block的速度計算變動大,可能會造成機台運動速度變動大,不利加工表面的平滑性,工具機建議值20-40ms,此參數在 2.5D輪廓模式(G62.1)會自動關掉,此參數不影響加工時間.前饋補償百分比(參數581..586):伺服馬達在運動中,會有馬達實際運動位置落後指令的情形,此落後量會與速度成正比,會與伺服迴路增益Kp成反比Ferr=Vcmd/Kp,控制器可依此關係,預補此落後量,此參數百分比設定越大,補償效果越好,但是機台抖動感覺會大一些,工具機建議值50%-90%.特別注意事項:1.800版軟體升級為900版軟體,需變動參數401/402參數:800版的切削加減速時間設定,祇是以固定時間,完成加減速,與G01速度設定(參數405)無關.高速高精度預看參數說明(look ahead):406,408轉角減速速度(406):說明:在直線轉角時,能夠預看轉角大小,事先減速,以參數設定的速度轉彎,此參考速度為轉角90度時,允許的角隅最高速度值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
新代系统标准参数公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]新代系统标准参数(供参考)Model: 900ME Version:Modification Date: 2006/09/24 Time: 15:08:16Model: 900ME Version:Modification Date: 2006/09/24 Time: 15:08:16No Value Title1 800 *设定第一轴轴板基址3 512 *设定第一轴IO板基址5 7 *IO板组态(0:EIO;1:H+3R1;2:H+R2+2R1;3:2R2+4R1)9 3 *轴板型态(0:E2;1:S4;2:S4+A;3:S4+B;4:E4;5:S6)10 0 *伺服警报接点型态(0:A;1:B;S6卡)11 2 *轴板时脉来源(0:轴板;1:Bus;2:VIA)12 400 *Servo6轴板最高时脉(Kpps)13 1 *设定轴板数目15 3 I/O板数位滤波程度17 2 *设定控制精度,BLU(1:条;2:微米;3:次微米)21 1 *设定X 轴对应的伺服轴22 2 *设定Y 轴对应的伺服轴23 3 *设定Z 轴对应的伺服轴24 0 *设定第四轴对应的伺服轴25 0 *设定第五轴对应的伺服轴26 0 *设定第六轴对应的伺服轴41 1 X 轴运动方向反向(0:正 1:反)42 0 Y 轴运动方向反向(0:正 1:反)43 1 Z 轴运动方向反向(0:正 1:反)44 0 第四轴运动方向反向45 0 第五轴运动方向反向46 0 第六轴运动方向反向61 4000 X 轴感应器解析度(编:次/转;光:次/mm)62 4000 Y 轴感应器解析度(编:次/转;光:次/mm)63 4000 Z 轴感应器解析度(编:次/转;光:次/mm)64 2500 第四轴感应器解析度(编:次/转;光:次/mm)65 2500 第五轴感应器解析度(编:次/转;光:次/mm)66 2500 第六轴感应器解析度(编:次/转;光:次/mm)81 4 X 轴的回授倍频82 4 Y 轴的回授倍频83 4 Z 轴的回授倍频84 4 第四轴的回授倍频85 4 第五轴的回授倍频86 4 第六轴的回授倍频101 200 X 轴马达的增益(RPM/V)102 200 Y 轴马达的增益(RPM/V)103 200 Z 轴马达的增益(RPM/V)104 200 第四轴马达的增益(RPM/V)105 200 第五轴马达的增益(RPM/V)106 200 第六轴马达的增益(RPM/V)121 1 X 轴螺杆侧齿数122 1 X 轴马达侧齿数123 1 Y 轴螺杆侧齿数124 1 Y 轴马达侧齿数125 1 Z 轴螺杆侧齿数126 1 Z 轴马达侧齿数127 1 第四轴螺杆侧齿数128 1 第四轴马达侧齿数129 1 第五轴螺杆侧齿数130 1 第五轴马达侧齿数131 1 第六轴螺杆侧齿数132 1 第六轴马达侧齿数161 10000 X 轴的PITCH(BLU)162 10000 Y 轴的PITCH(BLU)163 10000 Z 轴的PITCH(BLU)164 5000 第四轴的PITCH(BLU)165 5000 第五轴的PITCH(BLU)166 5000 第六轴的PITCH(BLU)181 120 X 轴伺服系统的回路增益(1/sec)182 120 Y 轴伺服系统的回路增益(1/sec)183 120 Z 轴伺服系统的回路增益(1/sec)184 30 第四轴伺服系统的回路增益(1/sec)185 30 第五轴伺服系统的回路增益(1/sec)186 30 第六轴伺服系统的回路增益(1/sec)201 0 *X 轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对) 202 0 *Y 轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对) 203 0 *Z 轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对) 204 0 *第四轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对) 205 0 *第五轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对) 206 0 *第六轴感应器型别(0:编码器;1:光学尺;2:无;3:绝对) 221 0 X 轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)222 0 Y 轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)223 0 Z 轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)224 0 第四轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)225 0 第五轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)226 0 第六轴轴的型态(0:线性轴;1-5:旋转轴型态A-E)241 0 *设定X 轴位置双回授对应机械轴242 0 *设定Y 轴位置双回授对应机械轴243 0 *设定Z 轴位置双回授对应机械轴244 0 *设定第四轴位置双回授对应机械轴245 0 *设定第五轴位置双回授对应机械轴246 0 *设定第六轴位置双回授对应机械轴261 250 X 轴位置双回授解析度(编:次/转;光:次/mm)262 250 Y 轴位置双回授解析度(编:次/转;光:次/mm)263 250 Z 轴位置双回授解析度(编:次/转;光:次/mm) 264 250 第四轴位置双回授解析度(编:次/转;光:次/mm) 265 250 第五轴位置双回授解析度(编:次/转;光:次/mm) 266 250 第六轴位置双回授解析度(编:次/转;光:次/mm) 281 0 X 轴直径轴或半径轴(0:半径轴;1:直径轴)282 0 Y 轴直径轴或半径轴(0:半径轴;1:直径轴)283 0 Z 轴直径轴或半径轴(0:半径轴;1:直径轴)284 0 第四轴直径轴或半径轴(0:半径轴;1:直径轴) 285 0 第五轴直径轴或半径轴(0:半径轴;1:直径轴) 286 0 第六轴直径轴或半径轴(0:半径轴;1:直径轴) 301 4 X 轴位置双回授回授倍频302 4 Y 轴位置双回授回授倍频303 4 Z 轴位置双回授回授倍频304 4 第四轴位置双回授回授倍频305 4 第五轴位置双回授回授倍频306 4 第六轴位置双回授回授倍频321 100 *X 轴名称322 200 *Y 轴名称323 300 *Z 轴名称324 400 *第四轴轴名称325 500 *第五轴轴名称326 600 *第六轴轴名称341 1 X 轴命令倍率分子342 1 Y 轴命令倍率分子343 1 Z 轴命令倍率分子344 1 第四轴命令倍率分子345 1 第五轴命令倍率分子346 1 第六轴命令倍率分子361 1 X 轴命令倍率分母362 1 Y 轴命令倍率分母363 1 Z 轴命令倍率分母364 1 第四轴命令倍率分母365 1 第五轴命令倍率分母366 1 第六轴命令倍率分母381 2 *X 轴位置伺服方式(0:CW;1:电压;2:AB)382 2 *Y 轴位置伺服方式(0:CW;1:电压;2:AB)383 2 *Z 轴位置伺服方式(0:CW;1:电压;2:AB)384 2 *第四轴位置伺服方式(0:CW;1:电压;2:AB)385 2 *第五轴位置伺服方式(0:CW;1:电压;2:AB)386 2 *第六轴位置伺服方式(0:CW;1:电压;2:AB)401 250 切削时的加减速时间(ms)402 150 重力加速度加减速时间(ms)404 10 后加减速切削钟型加减速时间(ms)405 5000 切削时的最高速度(mm/min)406 500 转角参考速度(mm/min)408 1500 半径5mm圆弧切削参考速度(mm/min)409 10 螺牙切削时的 1m/min加减速时间(ms)410 200 手轮加减速时间(ms)411 0 G00运动方式(0:线性;1:各轴独立)413 0 G92座标座标保留模式(0:否;1:重置;2:关机) 414 0 工件座标系统保留模式(0:否;1:重置;2:关机) 415 0 *重置或关机时保留目前刀长资料(0:否;1:是) 416 1000 刚性攻牙偶合时间 rev)417 0 刚性攻牙速度回路增益418 0 刚性攻牙加速度回路增益419 0 刚性攻牙主轴减速时间(ms)421 30 X 轴切削位置检查视窗(BLU)422 30 Y 轴切削位置检查视窗(BLU)423 30 Z 轴切削位置检查视窗(BLU)424 30 第四轴切削位置检查视窗(BLU)425 30 第五轴切削位置检查视窗(BLU)426 30 第六轴切削位置检查视窗(BLU)441 200 X 轴快速移动时(G00)的加减速时间(ms)442 200 Y 轴快速移动时(G00)的加减速时间(ms)443 200 Z 轴快速移动时(G00)的加减速时间(ms)444 200 第四轴快速移动时(G00)的加减速时间(ms)445 200 第五轴快速移动时(G00)的加减速时间(ms)446 200 第六轴快速移动时(G00)的加减速时间(ms) 461 12000 X 轴快速移动最高速度(mm/min)462 12000 Y 轴快速移动最高速度(mm/min)463 10000 Z 轴快速移动最高速度(mm/min)464 5000 第四轴快速移动最高速度(deg/min)465 5000 第五轴快速移动最高速度(deg/min)466 5000 第六轴快速移动最高速度(deg/min)481 30 X 轴快速移动位置检查视窗(BLU)482 30 Y 轴快速移动位置检查视窗(BLU)483 30 Z 轴快速移动位置检查视窗(BLU)484 30 第四轴快速移动位置检查视窗(BLU)485 30 第五轴快速移动位置检查视窗(BLU)486 30 第六轴快速移动位置检查视窗(BLU)501 0 X 轴快速移动F0速度(mm/min)502 0 Y 轴快速移动F0速度(mm/min)503 0 Z 轴快速移动F0速度(mm/min)504 0 第四轴快速移动F0速度(deg/min)505 0 第五轴快速移动F0速度(deg/min)506 0 第六轴快速移动F0速度(deg/min)521 5000 X 轴JOG 速度(mm/min)522 5000 Y 轴JOG 速度(mm/min)523 4000 Z 轴JOG 速度(mm/min)524 6000 第四轴JOG 速度(deg/min)525 6000 第五轴JOG 速度(deg/min)526 6000 第六轴JOG 速度(deg/min)541 100 X 轴切削加减速时间(ms)542 100 Y 轴切削加减速时间(ms)543 100 Z 轴切削加减速时间(ms)544 100 第四轴切削加减速时间(ms)545 100 第五轴切削加减速时间(ms)546 100 第六轴切削加减速时间(ms)561 100 X 轴遗失位置检查视窗(0.001 mm) 562 100 Y 轴遗失位置检查视窗(0.001 mm) 563 100 Z 轴遗失位置检查视窗(0.001 mm) 564 100 第四轴遗失位置检查视窗(0.001 mm) 565 100 第五轴遗失位置检查视窗(0.001 mm) 566 100 第六轴遗失位置检查视窗(0.001 mm) 581 0 X 轴速度前馈补偿百分比582 0 Y 轴速度前馈补偿百分比583 0 Z 轴速度前馈补偿百分比584 0 第四轴速度前馈补偿百分比585 0 第五轴速度前馈补偿百分比586 0 第六轴速度前馈补偿百分比601 3600000 X 轴转角参考速度(mm/min)602 3600000 Y 轴转角参考速度(mm/min)603 3600000 Z 轴转角参考速度(mm/min)604 3600000 第四轴转角参考速度(mm/min)605 3600000 第五轴转角参考速度(mm/min)606 3600000 第六轴转角参考速度(mm/min)621 5000 X 轴切削时的最高速度(mm/min)622 5000 Y 轴切削时的最高速度(mm/min)623 5000 Z 轴切削时的最高速度(mm/min)624 5000 第四轴切削时的最高速度(mm/min) 625 5000 第五轴切削时的最高速度(mm/min) 626 5000 第六轴切削时的最高速度(mm/min) 641 0 X轴重力加速度加减速时间(ms)642 0 Y轴重力加速度加减速时间(ms)643 0 Z轴重力加速度加减速时间(ms)644 0 第四轴重力加速度加减速时间(ms) 645 0 第五轴重力加速度加减速时间(ms) 646 0 第六轴重力加速度加减速时间(ms) 701 1 *X 轴所属轴群702 1 *Y 轴所属轴群703 1 *Z 轴所属轴群704 1 *第四轴所属轴群705 1 *第五轴所属轴群706 1 *第六轴所属轴群721 1 *第一轴群对应的MST通道722 1 *第二轴群对应的MST通道723 1 *第三轴群对应的MST通道724 1 *第四轴群对应的MST通道731 2 *CNC主系统轴群数目803 0 *Home Dog来源(0:I/O; 1:轴卡)821 1500 X 轴寻原点速度(mm/min)822 1500 Y 轴寻原点速度(mm/min)823 1500 Z 轴寻原点速度(mm/min)824 5000 第四轴寻原点速度(deg/min)825 5000 第五轴寻原点速度(deg/min)826 5000 第六轴寻原点速度(deg/min)841 500 X 轴寻原点的第二段低速速度(mm/min)842 500 Y 轴寻原点的第二段低速速度(mm/min)843 500 Z 轴寻原点的第二段低速速度(mm/min)844 2000 第四轴寻原点的第二段低速速度(deg/min)845 2000 第五轴寻原点的第二段低速速度(deg/min)846 2000 第六轴寻原点的第二段低速速度(deg/min)861 0 X 轴寻原点方向为负方向(0:正方向 1:负方向) 862 0 Y 轴寻原点方向为负方向(0:正方向 1:负方向) 863 0 Z 轴寻原点方向为负方向(0:正方向 1:负方向) 864 0 第四轴寻原点方向为负方向865 0 第五轴寻原点方向为负方向866 0 第六轴寻原点方向为负方向881 0 X 轴寻原点的偏移量(BLU)882 0 Y 轴寻原点的偏移量(BLU)883 0 Z 轴寻原点的偏移量(BLU)884 0 第四轴寻原点的偏移量(BLU)885 0 第五轴寻原点的偏移量(BLU)886 0 第六轴寻原点的偏移量(BLU)901 3 X 轴零速检查视窗(count)902 3 Y 轴零速检查视窗(count)903 3 Z 轴零速检查视窗(count)904 3 第四轴零速检查视窗(count)905 3 第五轴零速检查视窗(count)906 3 第六轴零速检查视窗(count)921 0 X 轴Home Dog极性(0:正;1:负)922 0 Y 轴Home Dog极性(0:正;1:负)923 0 Z 轴Home Dog极性(0:正;1:负)924 0 第四轴Home Dog极性(0:正;1:负)925 0 第五轴Home Dog极性(0:正;1:负)926 0 第六轴Home Dog极性(0:正;1:负)941 0 启动X 轴寻原点栅格功能(0:关闭;1:启动)942 0 启动Y 轴寻原点栅格功能(0:关闭;1:启动)943 0 启动Z 轴寻原点栅格功能(0:关闭;1:启动)944 0 启动第四轴寻原点栅格功能(0:关闭;1:启动)945 0 启动第五轴寻原点栅格功能(0:关闭;1:启动)946 0 启动第六轴寻原点栅格功能(0:关闭;1:启动)961 0 设X 轴寻原点方法(0:DOG;1:索引;2:DOG+预设)962 0 设Y 轴寻原点方法(0:DOG;1:索引;2:DOG+预设)963 0 设Z 轴寻原点方法(0:DOG;1:索引;2:DOG+预设) 964 0 设第四轴寻原点方法(0:DOG;1:索引;2:DOG+预设) 965 0 设第五轴寻原点方法(0:DOG;1:索引;2:DOG+预设) 966 0 设第六轴寻原点方法(0:DOG;1:索引;2:DOG+预设) 1221 0 X 轴启动背隙补偿功能(0:关闭 1:启动)1222 0 Y 轴启动背隙补偿功能(0:关闭 1:启动)1223 0 Z 轴启动背隙补偿功能(0:关闭 1:启动)1224 0 第四轴启动背隙补偿功能1225 0 第五轴启动背隙补偿功能1226 0 第六轴启动背隙补偿功能1241 5 X 轴的背隙补偿量(BLU)1242 5 Y 轴的背隙补偿量(BLU)1243 0 Z 轴的背隙补偿量(BLU)1244 0 第四轴的背隙补偿量(BLU)1245 0 第五轴的背隙补偿量(BLU)1246 0 第六轴的背隙补偿量(BLU)1301 0 启动X 轴齿节误差补偿(0:无;1:单向;2:双向) 1302 0 启动Y 轴齿节误差补偿(0:无;1:单向;2:双向) 1303 0 启动Z 轴齿节误差补偿(0:无;1:单向;2:双向) 1304 0 启动第四轴齿节误差补偿(0:无;1:单向;2:双向) 1305 0 启动第五轴齿节误差补偿(0:无;1:单向;2:双向) 1306 0 启动第六轴齿节误差补偿(0:无;1:单向;2:双向) 1321 50000 X 轴齿节误差补偿节距长度(BLU)1322 50000 Y 轴齿节误差补偿节距长度(BLU)1323 50000 Z 轴齿节误差补偿节距长度(BLU)1324 50000 第四轴齿节误差补偿节距长度(BLU)1325 50000 第五轴齿节误差补偿节距长度(BLU)1326 50000 第六轴齿节误差补偿节距长度(BLU)1341 50 X 轴原点在补偿表的位置编号1342 50 Y 轴原点在补偿表的位置编号1343 50 Z 轴原点在补偿表的位置编号1344 50 第四轴原点在补偿表的位置编号1345 50 第五轴原点在补偿表的位置编号1346 50 第六轴轴原点在补偿表的位置编号1361 0 X 轴圆弧尖角正向补偿量(BLU)1362 0 Y 轴圆弧尖角正向补偿量(BLU)1363 0 Z 轴圆弧尖角正向补偿量(BLU)1364 0 第四轴圆弧尖角正向补偿量(BLU)1365 0 第五轴圆弧尖角正向补偿量(BLU)1366 0 第六轴圆弧尖角正向补偿量(BLU)1381 30 X 轴圆弧尖角补偿时间常数(ms)1382 30 Y 轴圆弧尖角补偿时间常数(ms)1383 30 Z 轴圆弧尖角补偿时间常数(ms)1384 30 第四轴圆弧尖角补偿时间常数(ms)1385 30 第五轴圆弧尖角补偿时间常数(ms)1386 30 第六轴圆弧尖角补偿时间常数(ms)1401 0 X 轴机构补偿时间常数(ms)1402 0 Y 轴机构补偿时间常数(ms)1403 0 Z 轴机构补偿时间常数(ms)1404 0 第四轴机构补偿时间常数(ms)1405 0 第五轴机构补偿时间常数(ms)1406 0 第六轴机构补偿时间常数(ms)1421 10000 X 轴静态最大双回授误差(BLU)1422 10000 Y 轴静态最大双回授误差(BLU)1423 10000 Z 轴静态最大双回授误差(BLU)1424 10000 第四轴静态最大双回授误差(BLU)1425 10000 第五轴静态最大双回授误差(BLU)1426 10000 第六轴静态最大双回授误差(BLU)1441 0 X 轴圆弧尖角负向补偿量(BLU)1442 0 Y 轴圆弧尖角负向补偿量(BLU)1443 0 Z 轴圆弧尖角负向补偿量(BLU)1444 0 第四轴圆弧尖角负向补偿量(BLU)1445 0 第五轴圆弧尖角负向补偿量(BLU)1446 0 第六轴圆弧尖角负向补偿量(BLU)1581 0 前馈补偿时间常数(ms)1621 4 *第一主轴所对应的伺服轴或轴向轴1622 0 *第二主轴所对应的伺服轴或轴向轴1631 0 第一主轴零速OFFSET速度 mV)1632 0 第二主轴零速OFFSET速度 mV)1641 0 第一主轴编码器极性(0:正;1:负)1642 0 第二主轴编码器极性(0:正;1:负)1651 1000 第一主轴马达编码器一转的Pulse数1652 1000 第二主轴马达编码器一转的Pulse数1661 4 第一主轴的回授倍频1662 4 第二主轴的回授倍频1671 1800 第一主轴马达的增益(RPM/V)1672 200 第二主轴马达的增益(RPM/V)1681 1 第一主轴第一档螺杆侧齿数1682 1 第一主轴第一档马达侧齿数1683 1 第二主轴第一档螺杆侧齿数1684 1 第二主轴第一档马达侧齿数1711 0 *第一主轴是否安装编码器(0:否;1:是) 1712 0 *第二主轴是否安装编码器(0:否;1:是) 1721 10 第一主轴寸动速度(RPM)1722 10 第二主轴寸动速度(RPM)1731 100 第一主轴最低转速(RPM)1732 100 第二主轴最低转速(RPM)1741 50 第一主轴定位速度(RPM)1742 50 第二主轴定位速度(RPM)1751 0 第一主轴定位偏移量1752 0 第二主轴定位偏移量1761 1000 第一主轴定位减速时间(ms)1762 1000 第二主轴定位减速时间(ms)1771 0 第一主轴原点偏移量1772 0 第二主轴原点偏移量1781 0 第一主轴定位最低速度(RPM)1782 0 第二主轴定位最低速度(RPM)1791 0 *第一主轴马达型态(0:变频;1:P主轴;2:V主轴;3:伺服) 1792 0 *第二主轴马达型态(0:变频;1:P主轴;2:V主轴;3:伺服) 1801 17500 第一主轴最高转速(RPM)1802 8000 第二主轴最高转速(RPM)1811 0 第一主轴编码器安装位置(0:主轴侧;1:马达侧)1812 0 第二主轴编码器安装位置(0:主轴侧;1:马达侧)1821 0 第一主轴伺服微分增益1822 0 第二主轴伺服微分增益1831 0 第一主轴加减速时间(ms)1832 0 第二主轴加减速时间(ms)1841 0 第一主轴Y-Delta切换速度(RPM)1842 0 第二主轴Y-Delta切换速度(RPM)1851 150 第一主轴重力速度加减速时间(ms)1852 150 第二主轴重力速度加减速时间(ms)1901 1 第一主轴第二档螺杆侧齿数1902 1 第一主轴第二档马达侧齿数1903 1 第二主轴第二档螺杆侧齿数1904 1 第二主轴第二档马达侧齿数1921 1 第一主轴第三档螺杆侧齿数1922 1 第一主轴第三档马达侧齿数1923 1 第二主轴第三档螺杆侧齿数1924 1 第二主轴第三档马达侧齿数1941 1 第一主轴第四档螺杆侧齿数1942 1 第一主轴第四档马达侧齿数1943 1 第二主轴第四档螺杆侧齿数1944 1 第二主轴第四档马达侧齿数2001 100 手轮第四段倍率(最小输入单位,LIU)2003 1 MPG程式模拟对应手轮号码2021 5 *设定一号手轮对应的伺服轴2022 0 *设定二号手轮对应的伺服轴2023 0 *设定三号手轮对应的伺服轴2031 0 一号手轮对应的轴向轴(0:MLC;1~6:轴向)2032 0 二号手轮对应的轴向轴(0:MLC;1~6:轴向)2033 0 三号手轮对应的轴向轴(0:MLC;1~6:轴向)2041 100 一号手轮解析度(Pulse/转)2042 100 二号手轮解析度(Pulse/转)2043 100 三号手轮解析度(Pulse/转)2051 4 一号手轮回授倍频2052 4 二号手轮回授倍频2053 4 三号手轮回授倍频2061 1 一号手轮螺杆侧齿数2062 1 一号手轮马达侧齿数2063 1 二号手轮螺杆侧齿数2064 1 二号手轮马达侧齿数2065 1 三号手轮螺杆侧齿数2066 1 三号手轮马达侧齿数2401 1000 X 轴第一软体行程正极限(BLU)(根据实际的机床距离设定)2402 -800000 X 轴第一软体行程负极限(BLU) (根据实际的机床距离设定)2403 2000 Y 轴第一软体行程正极限(BLU) (根据实际的机床距离设定)2404 -700000 Y 轴第一软体行程负极限(BLU) (根据实际的机床距离设定)2405 2000 Z 轴第一软体行程正极限(BLU) (根据实际的机床距离设定)2406 -300000 Z 轴第一软体行程负极限(BLU) (根据实际的机床距离设定)2407 9 第四轴第一软体行程正极限(BLU)2408 -9 第四轴第一软体行程负极限(BLU)2409 9 第五轴第一软体行程正极限(BLU)2410 -9 第五轴第一软体行程负极限(BLU)2411 9 第六轴第一软体行程正极限(BLU)2412 -9 第六轴第一软体行程负极限(BLU)2441 0 X 轴第二软体行程正极限(BLU)2442 0 X 轴第二软体行程负极限(BLU)2443 0 Y 轴第二软体行程正极限(BLU)2444 0 Y 轴第二软体行程负极限(BLU)2445 0 Z 轴第二软体行程正极限(BLU)2446 0 Z 轴第二软体行程负极限(BLU)2447 0 第四轴第二软体行程正极限(BLU)2448 0 第四轴第二软体行程负极限(BLU)2449 0 第五轴第二软体行程正极限(BLU)2450 0 第五轴第二软体行程负极限(BLU)2451 0 第六轴第二软体行程正极限(BLU)2452 0 第六轴第二软体行程负极限(BLU)2801 0 X 轴第二参考点机械座标(BLU)2802 0 Y 轴第二参考点机械座标(BLU)2803 0 Z 轴第二参考点机械座标(BLU)2804 0 第四轴第二参考点机械座标(BLU)2805 0 第五轴第二参考点机械座标(BLU)2806 0 第六轴第二参考点机械座标(BLU)2821 0 X 轴第三参考点机械座标(BLU)2822 0 Y 轴第三参考点机械座标(BLU)2823 0 Z 轴第三参考点机械座标(BLU)2824 0 第四轴第三参考点机械座标(BLU)2825 0 第五轴第三参考点机械座标(BLU)2826 0 第六轴第三参考点机械座标(BLU)2841 0 X 轴第四参考点机械座标(BLU)2842 0 Y 轴第四参考点机械座标(BLU)2843 0 Z 轴第四参考点机械座标(BLU)2844 0 第四轴第四参考点机械座标(BLU)2845 0 第五轴第四参考点机械座标(BLU)2846 0 第六轴第四参考点机械座标(BLU)3201 0 *启动车床规则(0:关闭;1:C;2:A:3:B)3202 2000 *I/O扫瞄时间 ms)3203 2000 *补间时间 ms)3204 8000 *PLC扫瞄时间 ms)3205 1 *功能键型态(0:5个键;1:8个键;2:触控)3207 1 *C/S界面版本编号(1:百分比;2:段数)3209 1 *Language(0:English;1:Chinese;2:Local;3:Simplified) 3211 0 *使用单色萤幕(0:彩色;1:单色)3213 3 磁碟机代号(0:A;1:B;2:D;3:N)3215 0 *选刀时呼叫模式(0:一般;1:副程;2:巨集)3217 0 *控制键盘型态3219 3 *系统安装组态(0:NoSRAM;1:SRAM;2:HardDisk;3:CFCard) 3221 0 除错模式(0:一般;1:应用;2:系统)3223 1 启动系统管理功能(0:关闭;1:启动)3225 0 *萤幕保护功能延迟时间(分,0:关闭)3227 0 *萤幕解析度(0:640x480;1:800x600)3229 0 关闭工件座标功能(0:启动;1:关闭)3230 0 关闭车床刀长设定画面(0:启动;1:关闭)3231 0 *COM1远端装置型态(0:No;1:FX2;2:视觉;3:FX2-V2)3232 0 *COM2远端装置型态(0:No;1:FX2;2:视觉;3:FX2-V2)3236 0 *网路局号(0:关闭;1-31:网路局号)3237 1024 *公布资料起始R暂存器编号3238 0 *公布资料R暂存器长度3241 0 *工件程式小数点型态(0:标准;1:计算机)3243 0 *键盘重置键由PLC处理(0:人机;1:PLC)3245 1000 刀长补偿输入增量最大值(BLU)3247 0 速率显示方式(0:mm/min;1:m/min)3251 0 *触摸式萤幕型态(0:无;1:PenMount)3252 25 *触摸式萤幕Xmin3253 996 *触摸式萤幕Xmax3254 28 *触摸式萤幕Ymin3255 1006 *触摸式萤幕Ymax3401 0 MLC暂存器81(设置为R81=100 进给、模式等为键盘控制)3402 0 MLC暂存器823403 0 MLC暂存器833404 0 MLC暂存器843405 1000 MLC暂存器85(设置注油器注油关的时间)3406 83805 MLC暂存器86(设置注油器注油开的时间)3407 0 MLC暂存器873408 0 MLC暂存器883409 0 MLC暂存器893410 0 MLC暂存器90 (对刀次数设定)3411 0 MLC暂存器913412 0 MLC暂存器923413 0 MLC暂存器933414 0 MLC暂存器943415 0 MLC暂存器953416 0 MLC暂存器963417 0 MLC暂存器973418 0 MLC暂存器983419 0 MLC暂存器993420 0 MLC暂存器1003601 0 *M码呼叫巨集登录表编号13602 0 *M码呼叫巨集登录表编号23603 0 *M码呼叫巨集登录表编号33604 0 *M码呼叫巨集登录表编号43605 0 *M码呼叫巨集登录表编号53606 0 *M码呼叫巨集登录表编号63607 0 *M码呼叫巨集登录表编号73608 0 *M码呼叫巨集登录表编号83609 0 *M码呼叫巨集登录表编号93610 0 *M码呼叫巨集登录表编号103701 0 *G码呼叫巨集登录表编号13702 0 *G码呼叫巨集登录表编号23703 0 *G码呼叫巨集登录表编号33704 0 *G码呼叫巨集登录表编号43705 0 *G码呼叫巨集登录表编号53706 0 *G码呼叫巨集登录表编号63707 0 *G码呼叫巨集登录表编号73708 0 *G码呼叫巨集登录表编号83709 0 *G码呼叫巨集登录表编号93710 0 *G码呼叫巨集登录表编号103801 0 G95时进给量与主轴位置紧密偶合3802 1 内定高精控制模式(0:G64;1:G62;2:3804 99 工件计数M码编号3805 1000 静态双回授误差检查时间(ms)3807 5 圆弧终点不在圆弧上检查视窗(BLU)3809 0 *是否UVW为XYZ轴增量命令(0:否;1:是)3810 0 *启动同一单节M code同时执行功能(0:否;1:是) 3811 0 *公用变数永久保留区起始位置3813 0 *扩充型公用变数数目3815 0 刀具半径补偿预看模式(0:否;1:是)3816 0 刀长补偿模式(0:Z;1:单轴;2:多轴)3817 10000 严重双回授误差(BLU)3819 1 过切检查模式(0:关闭;1:检查;2:修正)3821 0 *第一组轴偶合主动轴轴号3822 0 *第一组轴偶合跟随轴轴号3823 1 *第一组轴偶合主动轴分量3824 0 *第一组轴偶合跟随轴分量3825 0 *第一组轴偶合偶合型态(0:不;1:机;2:对同;3:载;;2:主同) 3826 0 第一组轴偶合偶合时间(ms)3827 0 第一组轴偶合分离时间(ms)3831 1000 *放电解析度3832 0 *放电延迟时间3841 0 刀具量测Z+接触面座标(BLU)3842 0 刀具量测Z-接触面座标(BLU)3843 0 刀具量测X+接触面座标(BLU)3844 0 刀具量测X-接触面座标(BLU)3851 999900 断刀处理程式号码(0不启动)3861 0 *第二组轴偶合主动轴轴号3862 0 *第二组轴偶合跟随轴轴号3863 1 *第二组轴偶合主动轴分量3864 0 *第二组轴偶合跟随轴分量3865 0 *第二组轴偶合偶合型态(0:不;1:机;2:对同;3:载;;2:主同) 3866 0 第二组轴偶合偶合时间(ms)3867 0 第二组轴偶合分离时间(ms)3871 0 *第三组轴偶合主动轴轴号3872 0 *第三组轴偶合跟随轴轴号3873 1 *第三组轴偶合主动轴分量3874 0 *第三组轴偶合跟随轴分量3875 0 *第三组轴偶合偶合型态(0:不;1:机;2:对同;3:载;;2:主同) 3876 0 第三组轴偶合偶合时间(ms)3877 0 第三组轴偶合分离时间(ms)3881 0 *第四组轴偶合主动轴轴号3882 0 *第四组轴偶合跟随轴轴号3883 1 *第四组轴偶合主动轴分量3884 0 *第四组轴偶合跟随轴分量3885 0 *第四组轴偶合偶合型态(0:不;1:机;2:对同;3:载;;2:主同) 3886 0 第四组轴偶合偶合时间(ms)3887 0 第四组轴偶合分离时间(ms)3901 0 主从模式(0:控制器;1:周边或PC)3903 1 档案传输通讯埠位置(1:第一埠;2:第二埠)3905 1 巨集程式通讯埠位置(1:第一埠;2:第二埠)3921 3 第一埠速度(0:24;1:48;2:96;3:192;4:384;5:576;6:1152) 3922 8 第一埠资料位元数3923 0 第一埠交换码格式(0:ASCII;1:EIA;2:ISO)3924 0 第一埠周边控制方式(0:No;1:DC2;2:DC4;3:DC2DC4)3925 0 第一埠单节结束(EOB)输出方式(0:EOB;1:CR+EOB)3926 0 第一埠DC3周边控制码是否同位(0:否;1:同位)3927 1 第一埠流量控制方式(0:无;1:硬体;2:软体;3:RS485)3928 0 第一埠同位检查方式(0:无;1:奇;2:偶)3929 1 第一埠停止位元数(1:1位元;2:2位元)3941 3 第二埠速度(0:24;1:48;2:96;3:192;4:384;5:576;6:1152) 3942 8 第二埠资料位元数3943 0 第二埠交换码格式(0:ASCII;1:EIA;2:ISO)3944 0 第二埠周边控制方式(0:No;1:DC2;2:DC4;3:DC2DC4)3945 0 第二埠单节结束(EOB)输出方式(0:EOB;1:CR+EOB)3946 0 第二埠DC3周边控制码是否同位(0:否;1:同位)3947 1 第二埠流量控制方式(0:无;1:硬体;2:软体;3:RS485) 3948 0 第二埠同位检查方式(0:无;1:奇;2:偶)3949 1 第二埠停止位元数(1:1位元;2:2位元)8001~9200 0 轴齿节误差绝对补偿量正向表编号1~100使用者参数:4001 0 设定啄钻型态(0:一般;1:高速)4002 5000 设定钻孔循环退刀量(LIU)4004 0 设定攻牙循环退刀量(LIU)4010 50 铣削循环平面进给量百分比4020 0 设定塘孔主轴停止方向(0:X+,X-,Y+,Y-)。