Simulink中S函数在仿真建模中的应用
matlab simulink设计与建模-概述说明以及解释

matlab simulink设计与建模-概述说明以及解释1.引言1.1 概述概述部分的内容可以描述该篇文章的主题和内容的重要性。
可以参考以下写法:引言部分首先概述了文章的主要内容和结构,主要涉及Matlab Simulink的设计与建模方法。
接下来,我们将详细介绍Matlab Simulink 的基本概念、功能和应用,并探讨其在系统设计和仿真建模中的重要性。
本文旨在向读者提供一种全面了解Matlab Simulink的方法,并帮助他们在实际工程项目中运用该工具进行系统设计和模拟。
通过本文的阅读,读者将能够深入了解Matlab Simulink的优势和特点,并学会如何使用其开发和设计各种复杂系统,从而提高工程的效率和准确性。
在接下来的章节中,我们将重点介绍Matlab Simulink的基本概念和设计方法,以及实际案例的应用。
最后,我们将通过总结现有的知识和对未来发展的展望,为读者提供一个全面的Matlab Simulink设计与建模的综合性指南。
1.2文章结构1.2 文章结构本文将以以下几个部分展开对MATLAB Simulink的设计与建模的讨论。
第一部分是引言部分,其中概述了本文的主要内容和目的,并介绍了文章的结构安排。
第二部分是正文部分,主要包括MATLAB Simulink的简介和设计与建模方法。
在MATLAB Simulink简介部分,将介绍该软件的基本概念和功能特点,以及其在系统设计和建模中的优势。
在设计与建模方法部分,将深入讨论MATLAB Simulink的具体应用技巧和方法,包括系统建模、模块化设计、信号流图、仿真等方面的内容。
第三部分是结论部分,主要总结了本文对MATLAB Simulink设计与建模的讨论和分析,并对其未来的发展方向进行了展望。
通过以上结构安排,本文将全面介绍MATLAB Simulink的设计与建模方法,以期为读者提供一个全面而系统的了解,并为相关领域的研究和应用提供一些借鉴和参考。
simulink的s函数

simulink的s函数Simulink是一种广泛使用的MATLAB工具箱,用于建模、仿真和分析复杂的系统。
S函数是Simulink中最常用的自定义函数之一,它允许用户使用C或C++编写自己的代码,并将其集成到Simulink模型中。
本文将介绍S函数的基本概念、使用方法和注意事项,并提供一个全面详细的函数示例。
一、S函数概述1.1 S函数定义S函数是一种特殊类型的Simulink块,它允许用户使用C或C++编写自己的代码,并将其嵌入到Simulink模型中。
S函数可以执行各种任务,例如数据处理、控制算法实现、硬件接口等。
1.2 S函数分类根据功能和实现方式,S函数可以分为以下几类:(1)输入输出型:用于处理输入信号并生成输出信号。
(2)状态存储型:用于存储状态变量,并在每个时间步骤更新状态变量。
(3)参数传递型:用于传递参数值给其他块或子系统。
(4)事件触发型:在特定条件下触发某些事件或操作。
1.3 S函数优点相对于其他类型的Simulink块,S函数具有以下优点:(1)可定制性高:用户可以根据需要编写自己的代码,实现各种功能。
(2)计算速度快:由于S函数使用C或C++编写,因此可以利用底层硬件资源,提高计算速度。
(3)适用范围广:S函数可以处理各种类型的数据和信号,并与其他Simulink块无缝集成。
二、S函数使用方法2.1 S函数创建在Simulink中创建S函数的步骤如下:(1)打开Simulink模型(2)从“Simulink库浏览器”中选择“User-Defined Fun ctions”类别(3)选择“S-Function”块并拖动到模型中2.2 S函数参数设置在创建S函数后,用户需要设置一些参数以定义其行为。
常见的参数包括:(1)输入端口数和数据类型(2)输出端口数和数据类型(3)状态变量数和数据类型(4)参数变量数和默认值2.3 S函数代码编写完成参数设置后,用户需要编写自己的代码以实现所需功能。
MATLAB/Simulink下实现实时一些方法总结

MATLAB/Simulink下实现实时一些方法总结总结了使用MATLAB/Simulink进行实时仿真时实现实时的几种方法,包括使用Real-time Workshop和编写S函数的方法,同时通过实验检验了C语言S 函数实时模块的功能。
经仿真测试表明,在对时间精度要求不是很高的过程进行实时仿真和分析时,可以得到较好的效果。
标签:实时;MATLAB/Simulink;Real-time Workshop;S函数1 概述仿真技术由于能省去了实物系统实现过程中的繁琐步骤,对问题的解决有着良好的针对性,因此给科研和试验提供了很大的便利[1-3]。
但另一方面,仿真由于对模型的依赖性,其结果并很难完全反映实际情况。
因此,为了得到更接近实际情况的结果,可采用将数学模型与物理模型或实物相结合半实物仿真[1,2]。
半实物仿真系统既包含虚拟对象,又包含实物对象,因此更真实地反映实际系统的动、静态特性和非线性因素。
由于有实物的接入,半实物仿真对实时性有着较高的要求。
Matlab/Smulink在控制理论研究中是一个很优秀的仿真软件,可方便地对控制算法或控制对象进行建模和仿真实验[2-8]。
在仿真情况下,仿真运行的时间取决于仿真机的运行速度和模型的复杂程度等因素,因此Matlab/Smulink模型运行的时间可能远小于实际过程的运行时间。
但在半实物仿真中,实物对象的实际执行时间与模型仿真时间可能不一致,因此有必要使Simulink虚拟模型与外部连接的硬件运行同步,实现实时仿真,以获得接近实际情况的实验结果。
要用Matlab/Smulink进行实时仿真,可以利用自带的Real-Time Workshop和Real-Time Windows Target、xPC Target等工具,也可编写能进行实时仿真的应用程序,灵活地实现实时[4-9]。
本文将针对在Matlab/Smulink环境下的实时仿真、控制,探讨和总结一些实现实时的方法。
matlab中的sfunction的用法(C语言)—转
matlab中的sfunction的用法(C语言)—转matlab中的sfunction的用法(C语言)matlab中的sfunction的用法(C语言)创建一个有1输入(2维),2输出(1维),3个参数,还有全局变量的s-function。
1.新建sfunction的C语言文件打开simulink,点击User-Defined?Functions里面的S-Function?Examples。
这个里面有多个语言版本的模板,有C,C++,Ada,Fortran和M语言的版本,其实都大同小异,只要了解几个函数就很容易使用了。
?选择C语言的版本:从S-function模块中选择C-file?S-functions里面的Basic?C-MEX?template。
打开后,另存为自己的模块名字,如test.c。
?下面我们来分析代码:#define?S_FUNCTION_NAME?test//这里把文件名sfuntmpl_basic修改为test?#define?S_FUNCTION_LEVEL?2#include?"simstruc.h"//程序里面要用到的头文件在这里引用,如“math.h”等。
float?global_var;?//定义全局变量static?void?mdlInitializeSizes(SimStruct?S){//这个函数用来设置输入、输出和参数的。
ssSetNumSFcnParams(S,?3);?/设置参数个数,这里为3?/if?(ssGetNumSFcnParams(S)?!=?ssGetSFcnParamsCount(S))?{return;}ssSetNumContStates(S,?0);//设置连续状态的个数,缺省为0;?ssSetNumDiscStates(S,?0);//设置离散状态的个数,缺省为0;if?(!ssSetNumInputPorts(S,?1))?return;//设置输入变量的个数,这里为1ssSetInputPortWidth(S,?0,?2);?//设置输入变量0的维数为2 ssSetInputPortRequiredContiguous(S,?0,?true);?//设置input0的访问方式,true就是临近访问,这样指针的增量后就可以直接访问下个input端口了。
基于S函数在自抗扰控制器Simulink仿真中的应用
App ia i n o f nci n i i u i i ulto o lc to fS-u to n S m l nk sm a in fADRC
MA n — u n Yo g g a g,RAN n Ni g,ZHAO e g Pn
( c ol f ot l n o p t n ier g N r h aEetcP w r nvri , adn 7 0 3 hn ) Sh o o nr dC m ue E g e n , o h C i lc o e i sy B o ig 10 ,C ia C oa r n i t n i r U e t 0
c mb n t n a d e n e t t b e v ra d i lm e ts b y t ms e c p ua i n o i a i n  ̄e d d sa e o s r e n mp e o n u s s e n a s lt .Th o g h i t a t mp r - o r u h t e ma n se m e ea
控 制 系统 的 仿 真 实 例 。 明 自抗扰 技 术 具 有 较 好 的调 节 品质 和 抗 干 扰 性 。 说
关键词 : 自抗扰控制 ;- n t n 子系统封装 ; Sf c o ; u i 仿真
中 图分 类 号 :T 3 19 T 2 3 P 9 . ; P 7 文 献标 志码 : B
自抗扰控 制器 由三个部 分组成 : 1 跟踪微分器 ( D) 为 系统 输入 安排 过渡 过程 , 到光 ) T : 得
滑的输入信号 以及 输入信号的微分信号 ;
2 扩 张状态观测器 ( S ) 估 计 出实时 作用 量 而给 予补 ) EO :
q ik e s a d h s hghp a t a au . uc n s n a i r ci l le c v Ke d ywors:ADRC;S- n t n;s b y t m a k g f ci u o u s se p c a e;smuain i lt o
Simulink中S函数在仿真建模中的应用_路玲
收稿日期:2004-08-20基金项目:郑州航空工业管理学院青年基金资助项目(Q02308)作者简介:路 玲(1964-),女,河南洛阳人,硕士,从事计算机应用教学与研究工作,副教授。
Simulink 中S 函数在仿真建模中的应用路 玲,陈建辉,李 琳(郑州航空工业管理学院,河南 郑州 450015)摘 要:利用S 函数可便捷地创建用户所需模型,因为利用S 函数可创建一个通用模块,在不同条件下只需修改其参数即可被不同场合使用。
文章在论述S 函数功能和创建方法的基础上,结合实例介绍M 形式S 函数的应用。
关键词:Simulink ;S 函数;仿真建模;应用中图分类号:TP273 文献标识码:C 文章编号:1009-1750(2004)06-0182-02 使用计算机仿真具有可缩短研究周期、节省费用、不受外部环境的限制等优势。
长期以来,仿真领域的研究重点是仿真模型建立。
目前较流行的仿真工具之一是MAT -LAB ,它在继承和发展原有数值计算和图形可视能力的同时,提供了Si mulink ,一个交互式操作的动态系统建模、仿真、分析集成环境,使系统从模型建立到仿真结果的分析变得简单,易操作。
尽管Simulink 已提供了十分丰富的模型库,如Simulink 模型库、通信模型库、数字信号模型库,等等,但在实际系统建模时,我们会遇到一些特殊的环节,它们不能或者难以用给定的模型来描述,在这种情况下,Simulink 中的扩展工具S 函数就会发挥其独特效用。
一、S 函数功能S 函数(S —Function ),或称系统函数(System Function )是用户借以自建的Simulink 模块所必需的,具有特殊调用格式的函数文件。
利用Simulink 中提供的S 函数模板进行适当的“剪裁”,就可根据实际建模的需要,建立用户所需的模型。
S 函数主要适用以下场合:生成用户在研究中有可能经常反复使用的S 函数模块、生成某硬件装置的S 函数模块、将已存的C 码程序构造成S 函数模块、为一组数学方程所描写的系统,建立一个专门的S 函数模块、构件用于图形动画表现的S 函数模块。
如何使用MATLABSimulink进行动态系统建模与仿真

如何使用MATLABSimulink进行动态系统建模与仿真如何使用MATLAB Simulink进行动态系统建模与仿真一、引言MATLAB Simulink是一款强大的动态系统建模和仿真工具,广泛应用于各个领域的工程设计和研究中。
本文将介绍如何使用MATLAB Simulink进行动态系统建模与仿真的方法和步骤。
二、系统建模1. 模型构建在MATLAB Simulink中,可以通过拖拽模块的方式来构建系统模型。
首先,将系统的元件和子系统模块从库中拖拽到模型窗口中,然后连接这些模块,形成一个完整的系统模型。
2. 参数设置对于系统模型的各个组件,可以设置对应的参数和初始条件。
通过双击模块可以打开参数设置对话框,可以设置参数的数值、初始条件以及其他相关属性。
3. 信号连接在模型中,各个模块之间可以通过信号连接来传递信息。
在拖拽模块连接的同时,可以进行信号的名称设置,以便于后续仿真结果的分析和显示。
三、系统仿真1. 仿真参数设置在进行系统仿真之前,需要设置仿真的起止时间、步长等参数。
通过点击仿真器界面上的参数设置按钮,可以进行相关参数的设置。
2. 仿真运行在设置好仿真参数后,可以点击仿真器界面上的运行按钮来开始仿真过程。
仿真器将根据设置的参数对系统模型进行仿真计算,并输出仿真结果。
3. 仿真结果分析仿真结束后,可以通过查看仿真器界面上的仿真结果来分析系统的动态特性。
Simulink提供了丰富的结果显示和分析工具,可以对仿真结果进行绘图、数据处理等操作,以便于对系统模型的性能进行评估。
四、参数优化与系统设计1. 参数优化方法MATLAB Simulink还提供了多种参数优化算法,可以通过这些算法对系统模型进行优化。
可以通过设置优化目标和参数范围,以及定义参数约束条件等,来进行参数优化计算。
2. 系统设计方法Simulink还支持用于控制系统、信号处理系统和通信系统等领域的特定设计工具。
通过这些工具,可以对系统模型进行控制器设计、滤波器设计等操作,以满足系统性能要求。
实验5_SIMULINK建模与仿真实验
课外实验 SIMULINK 建模与仿真实验 实验目的1、 掌握用SIMULINK 创建和编辑仿真模型的方法2、 掌握用SIMUINK 进行离散时间系统建模仿真的方法3、 熟悉用SIMUINK 进行连续时间系统建模仿真的方法4、 掌握SIMULINK 中子系统的创建、装帧及控制执行方法5、 掌握S 函数模块的创建和使用方法6、 熟悉用MA TLAB 指令运行SIMULINK 模型的方法实验内容1、 启动SIMULINK (使用simulink 命令),浏览Simulink Libarory Browser ,熟悉Simulink 提供的各种模块,参照下图建立仿真模型,求解以下微分方程的数值解: 2)0(',1)0(,300,cos )(sin d d d d 22==≤≤=⋅-+--y y x x e x y x x y e x y x x 实验过程中,注意练习模块的选定、复制、移动、删除、调整大小、旋转、改名、隐藏模块名、模块加阴影、模块参数设置,信号线的产生、移动、删除、分支、折曲、宽度显示、色彩、插入模块、标识,模型注释、仿真配置等。
2、 加法器是数字系统中最基本的逻辑器件,它可用于二进制的减法运算、乘法运算,BCD 码的加、减法,码组变换,数码比较等。
查阅加法器及相关资料,完成以下实验:(1)利用Simulink 中的Logical Operator 等模块建立一个全加器逻辑电路仿真模型;(2)将所设计的全加器另存为一个新文件(以防止后续操作破坏原文件),将其封装(简装)成一个子系统;(3)对简装的全加器进一步进行装帧(精装);(4)利用精装的全加器设计一个加法器应用系统仿真模型,设计的应用模型中,尽可能用到Enabled Subsystem 、Trigged Subsystem 和Trigged and Enabled Subsystem 等条件执行子系统。
3、 自编S 函数实现全加器功能,将上一实验第(4)步设计的应用系统中的全加器用S 函数模块替换,通过实验检验S 函数模块的功能是否正确。
Simulink的使用
Simulink的使用Matlab的Simulink是一个用来对动态系统进行建模、仿真和分析的软件包。
它使得Matlab的功能得到进一步的扩展,这种扩展表现在三个方面:(1)实现了可视化建模,在Windows环境下,用户可以通过简单的鼠标操作建立直观的系统模型,进行分析仿真。
(2)实现了多种环境间的文件共享与数据交换,甚至能够与硬件实现实时信息交换。
(3)把理论研究与工程实现有机地结合在一起。
Simulink支持连续、离散及混合的线性系统和非线性系统,并且支持多采样率系统。
其可视化建模体现在为用户提供了用方框图进行系统建模的图形接口.Simulink具有一个较为完整的模型库,包括源节点(Source)、阱节点(Sink)、线性环节(Linear)、非线性环节(Nonlinear)、连线与接口(Connections)和其他环节(Extra),用户还可以根据需要定制和创建自己的模块。
Simulink模型具有分层的等级结构,用户可以采用由上到下或从下到上的方式构建系统模型。
可以从全局的角度来考察系统,然后用鼠标双击其中的子系统模块,来查看下一级的内容,依此类推,可以看到系统模型的全部细节。
这种方式帮助用户洞察整个系统模型的体系结构及其各个部分的相互关系。
定义完一个模型后,用户可以通过Simulink的菜单或者Matlab 命令对它进行仿真。
可以在仿真的同时显示仿真结果,非常实用。
除此之外,还可以在用户改变参数之后迅速观察到系统中发生的变化。
Simulink的仿真结果可以输入到Matlab工作空间,进行事后处理或者可视化输出。
Simulink的实时工作间(Real-Time Workshop,以后简称RTW)直接从Simulink的系统框图自动生成C语言代码,这样一来,就允许在更广的计算机平台(包括实时硬件)上执行连续、时间离散及混合系统模型。
Simulink RTW的Ada扩展的作用是直接从Simulink的系统框图自动生成Ada浯言代码。
倒立摆的s函数建模及仿真
倒立摆的s函数建模及仿真倒立摆是一类普遍存在于现实生活中的控制工程问题,也是机器人控制领域中的典型问题。
为了探究倒立摆的控制方法,需要进行建模和仿真研究。
本文将介绍如何对倒立摆进行s函数建模,并进行仿真研究。
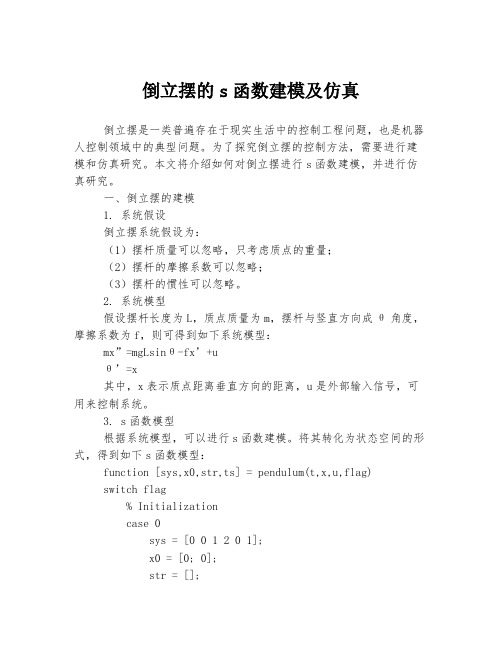
一、倒立摆的建模1. 系统假设倒立摆系统假设为:(1)摆杆质量可以忽略,只考虑质点的重量;(2)摆杆的摩擦系数可以忽略;(3)摆杆的惯性可以忽略。
2. 系统模型假设摆杆长度为L,质点质量为m,摆杆与竖直方向成θ角度,摩擦系数为f,则可得到如下系统模型:mx”=mgLsinθ-fx’+uθ’=x其中,x表示质点距离垂直方向的距离,u是外部输入信号,可用来控制系统。
3. s函数模型根据系统模型,可以进行s函数建模。
将其转化为状态空间的形式,得到如下s函数模型:function [sys,x0,str,ts] = pendulum(t,x,u,flag)switch flag% Initializationcase 0sys = [0 0 1 2 0 1];x0 = [0; 0];str = [];ts = [];% Derivativescase 1sys = [x(2); (u(1)*cos(x(1))-9.8*sin(x(1)))/0.5];% Outputscase 3sys = [x(1)];% Unhandled flagscase {2, 4, 9}sys = [];otherwiseerror(['Unhandled flag = ',num2str(flag)]);end二、倒立摆的仿真倒立摆的仿真可以使用Matlab软件进行实现。
下面介绍具体的仿真过程:1. 创建仿真模型打开Matlab软件,选择“Simulink”工具栏,创建一个新的模型文件。
2. 添加控制器在模型中添加一个控制器,用于产生外部输入信号u。
具体可选择Proportional Integral Derivative(PI D)控制器或者其他控制器。
SIMULINK仿真中S函数的使用
S函数的工作原理
初始化例程子函数 function [sys,x0,str,ts]=mdlInitializeSizes(l,m,d,k) sizes.NumContStates = 2; sizes.NumDiscStates = 0; sizes.NumOutputs = 1; sizes.NumInputs = 0; sizes.DirFeedthrough = 1; x0 = [-l;0];
·输入模块:即信号源模块,包括常数字信号源和用户自定义信号; ·状态模块:即被模拟的系统模块,是系统建模的核心和主要部分; ·输出模块:即信号显示模块,它能够以图形方式、文件格式进行显示。
注意:在设计一个模型时,必须先确定这三个部分,以及它们之间的联系;Simulink的 仿真模型并非一定要完全包括这三个部分,它可以缺少其中一个或者两个; Simulink 的状态模块可以是连续的、离散的,或者它们二者的结合。
% 输入量个数,缺省为0
sizes.DirFeedthrough = 1; % 有无直接馈入,有取1,无取0,缺省为1
sizes.NumSampleTimes = 1; % 采样时间个数,至少取1
sys = simsizes(sizes);
% 返回sizes 数据结构所包含的信息
x0 = [];
% 设置初始状态
The Legacy Code Tool
创建S函数源文件
%主函数
function [sys,x0,str,ts] = sfuntmpl(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes; % 初始化例程子函数
case 1,
MATLAB7.0使用详解-第10章 SIMULINK高级仿真技术

10.5.3 平衡点的分析
平衡点(Equilibrium points)在数学上描述为 使状态一阶导数为零的点。其对于非线性系统的 系统稳定性的分析和评估是很有用的。 MATLAB中用于求取平衡点的函数是trim。trim函 数的工作原理是先从一个指定的初始值开始,借 助数值运算,搜索最接近初始值的平衡点。事实 上,该指令并不保证搜索到的平衡点就一定是最 接近初始值,当trim指令找不到导数为零的平衡 点时,将返回搜索中使得状态导数最大绝对值最 接近零的点。如果搜索失败,可以改变初始值再 进行尝试。
10.2.2 Initialization标签页
初始化设置标签页如图10.10所示。其中的对话变量表是在用户设 置了参数设置页(Parameters)之后自动生成的。初始化命令 (Initialization conmmands)一般是MATLAB指令,可以通过 MATLAB命令定义封装后子系统空间中的各种变量,以便这些变量 在被封子系统模块图标绘制指令或其他初始化指令中使用。
10.3.1
使能子系统(Enable Subsystem)
使能子系统(Enable Subsystem)将控制信号分 为允许(enable)和禁止(disenable)两种。当 控制信号为正时,即控制信号为允许状态,系统 可以执行使能子系统中的模块;否则就禁止模块 功能。
10.3.2 触发子系统(Triggered Subsystem)
10.4.3 设置断点
如果用户知道自己系统执行到某些点或者满足一 定条件就会出错,那么设置断点就将显得很有用。 简单来说,断点就是仿真执行到该处时会暂停仿 真,这时用户可以通过Continue指令跳过这一断 点继续执行到下一断点。SIMULINK调试器允许用 户设置的断点有两类:无条件中断和有条件中断。
MATLABSimulink在系统建模与仿真中的应用
MATLABSimulink在系统建模与仿真中的应用第一章:MATLAB与Simulink简介MATLAB和Simulink是数学、工程和科学领域中广泛使用的工具。
MATLAB是一种高级技术计算语言,Simulink则是一种基于图形化建模的仿真环境。
这两种工具的结合为系统建模和仿真提供了强大的平台。
第二章:系统建模基础系统建模是一种将现实世界中的问题转化为数学模型的过程。
这个过程包括选择合适的数学工具和方法,将现实世界的元素映射到数学符号,并建立系统的关系方程。
MATLAB提供了丰富的数学函数和工具,使得系统建模变得更加简单和高效。
第三章:Simulink图形化建模Simulink提供了一种直观且易于使用的图形化界面,用户可以通过拖拽和连接各种模块来构建系统模型。
Simulink中的模块代表了不同的物理组件或处理单元,如传感器、电路、控制器等。
用户可以通过设置各个模块的参数和初始条件来建立完整的系统模型。
第四章:系统仿真与分析Simulink不仅提供了图形化建模的功能,还可以进行系统的仿真和分析。
用户可以通过Simulink内置的求解器和仿真器来模拟系统的运行过程,并获得各种关键性能指标,如系统的稳定性、响应时间等。
同时,Simulink还支持多种优化算法,可以帮助用户优化系统的设计和性能。
第五章:系统参数优化系统参数的优化是系统建模与仿真中的重要环节。
MATLAB提供了丰富的优化工具箱,用户可以通过设置参数范围和优化目标来自动寻找最优解。
Simulink与MATLAB的无缝集成使得系统建模与仿真可以更加高效地与参数优化相结合。
第六章:应用案例分析通过系统建模与仿真,MATLABSimulink在各个领域都有广泛的应用。
以汽车行业为例,通过建立电动汽车的动力系统模型,可以优化电池容量和控制策略,从而提高整车的性能和续航里程。
在航空航天领域,Simulink可以用于设计和验证飞机的控制系统,以确保其安全性和稳定性。
基于S函数的BP神经网络PID控制器及Simulink仿真

S i mu l i n k s i mu l a t i o n O f BP n e u r a l n e t wo r k PI I )c o n t r o l l e r b a s e d o n S - f u n c t i o n
YANG Yi ,HU E n - d i a n
表1 F l a g  ̄ 的调 用 函数 及 功 能 描 述
数 加 以描 述 ) 时, 若直接使用 S i mu l i n k进 行 仿 真 , 由 于没 有 现
成 的 功 能 模 块 可 用 , 通 常 都 要 编 写 大 量 复 杂 而 烦 琐 的源 程 序 进行 仿 真 , 这样 一来 编程 复杂 , 工作 量较 大 , 故 需 引 入 S函 数。 S函数 的 本 质 是 对 动 态 系 统 行 为 模 式 的一 种 描 述 , 因 此 对 于一些结构庞 大 、 算法 复杂 、 而且 参 数 变 化 的 系 统 , 无 疑 S函 数具有非常大的优势[ 2 1 。 用 M A T L A B 中 的 各 种 函 数 和 语 言 编 写 M 文 件 ,从 而 形 成 特 定 功 能 的 S函 数 『 3 1 。只 要 所 研 究 的 系 统 模 型 能 够 由
( S o c h o o l o fE l e c t r i c a l a n d I n f o r ma t i o n E n g i n e e i r n g , B e f i ng a U n i v e r s i t y f o r N a t i o n l i t i e s , Y i n c h u a n 7 5 0 0 2 1 , C h i n a )
h a s b e e n s e t . F i n a l l y , t h e r e s u l t o f t h e s i m u l a t i o n m o d e w h i c h i s a p p l i e d t o n o n l i n e a r o b j e c t h a s b e e n g i v e n .
simulink传递函数系数
simulink传递函数系数Simulink是一种流行的建模和仿真工具,可以用于各种应用程序的建模和仿真,包括控制器设计、信号处理、通信、器件建模等。
其中一个重要的功能就是传递函数的建模和仿真。
在Simulink中,传递函数通常表示为S函数块,其输入和输出可以是系统的状态变量、控制信号、传感器测量值等。
本文将详细讲解如何使用Simulink传递函数系数。
第一步:打开Simulink在电脑桌面上找到Simulink的图标,双击启动。
如果没有安装,则需要先安装。
第二步:添加传递函数块在Simulink的模型窗口中,可以使用鼠标从左侧的模块库中拖动传递函数块到模型中。
在传递函数块的参数设置窗口中,需要输入传递函数的系数。
通常,传递函数的系数可以由控制论或系统分析中的理论分析得到,也可以通过实验或应用经验确定。
第三步:确认传递函数块的输入和输出在传递函数块的参数设置窗口中,需要确认传递函数块的输入和输出。
传递函数的输入和输出可以是系统的状态变量、控制信号、传感器测量值等。
通常,传递函数的输入和输出应该与实际系统的输入和输出相对应。
第四步:建立完整的系统模型除了传递函数块,Simulink中的系统模型通常还包括其他类型的块,如控制器、传感器、执行器等。
在建立完整的系统模型之后,可以通过Simulink的仿真功能对这个系统模型进行仿真,并对其进行性能分析和优化。
总结:在Simulink中,传递函数系数的设置是建立模型的重要步骤之一。
通过详细的理论分析或实验确定传递函数系数可以提高模型的准确性和性能。
在建立完整的系统模型之后,可以使用Simulink 的仿真功能对模型进行性能分析和优化,并得到优秀的控制系统。
s-function函数

s-function函数S-function函数是一种在MATLAB/Simulink中编写和使用的自定义函数,它可以用于创建一些自己的特定的建模和仿真代码,以便更好地解决仿真问题。
S-function函数由三个部分组成:描述文件 (S-Function Block Description File)、模块文件 (S-Function Block Module File) 和可执行文件 (S-Function Code File),其中,每个文件都有自己特殊的作用。
S-function函数通常用于仿真数字信号处理系统,由于Matlab/Simulink中已经集成了大量的信号处理库,因此,可以通过编写S-function函数来扩展原有功能或解决一些复杂的特定问题。
此外,S-function函数还可以用于实现特殊的控制算法,如模型预测控制、自适应控制、模糊控制、PID控制等,也可以用于模拟复杂机电系统、信号处理系统和智能控制系统。
使用S-function函数进行建模和仿真需要具备一定的MATLAB/Simulink编程知识,以下是使用S-function函数进行建模和仿真的基本流程:1. 创建S-Function Block Description File2. 编写模块文件编写模块文件是创建S-function函数的第二步,该文件描述了仿真模块的行为,包括状态更新、输出计算等,需要使用MATLAB/Simulink语言进行编写,与普通的MATLAB语言相同。
编写可执行文件是创建S-function函数的第三步,该文件是编译后的链接库文件,它包含S-function代码的可执行程序,需要使用MATLAB/Simulink的S-Function Builder进行编译。
完成编写后,将可执行文件(.dll、.mexw64或 .slx)与描述文件、模块文件放到同一目录下。
4. 添加仿真模块将建好的S-function Block添加到仿真模型中,然后对其进行参数设置和连接,最后对模型进行运行调试即可。
实验五 simulink在仿真中的应用
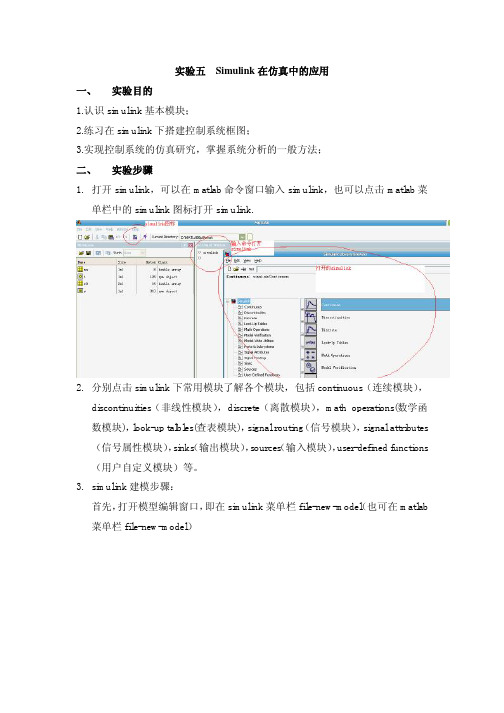
实验五 一、 实验目的Simulink 在仿真中的应用1.认识 simulink 基本模块; 2.练习在 simulink 下搭建控制系统框图; 3.实现控制系统的仿真研究,掌握系统分析的一般方法; 二、 实验步骤1. 打开 simulink,可以在 matlab 命令窗口输入 simulink,也可以点击 matlab 菜 单栏中的 simulink 图标打开 simulink.2. 分别点击 simulink 下常用模块了解各个模块,包括 continuous(连续模块) , discontinuities(非线性模块) ,discrete(离散模块) ,math operations(数学函 数模块), look-up talbles(查表模块), signal routing (信号模块) signal attributes , (信号属性模块)sinks , (输出模块)sources 输入模块)user-defined functions , ( , (用户自定义模块)等。
3. simulink 建模步骤: 首先, 打开模型编辑窗口, 即在 simulink 菜单栏 file-new-model (也可在 matlab 菜单栏 file-new-model)其次, 复制或者拖拽相应的模块到 model 文件中。
(注意, 要实现模块的翻转, 可以选中模块,点击右键-format-flip bolck) 再次,双击模块,修改相应的参数,并把模块链接起来,点菜单栏上的箭头 (如下图示)或者点击菜单栏上 simulation-start 即可开始仿真。
最后,双击示波器查看控制效果曲线。
三、实验内容P177 已知多采样速率系统电机双闭环控制系统中,内环为电流环 ,采样周期 是 T1=0.001s,控制器模型为 D1(z)=(0.0967z-0.0965)/(z-1);外环为转速环,采样周期是 T2=0.01s,控制器模型为 D2(z)=(5.2812z-5.2725)/(z-1)。
simulink数学公式建模

simulink数学公式建模摘要:1.Simulink 简介2.Simulink 中的数学公式建模3.Simulink 数学公式建模的应用实例4.总结正文:一、Simulink 简介Simulink 是MathWorks 公司开发的一款与MATLAB 相结合的图形化仿真环境,主要用于动态系统的建模、仿真和分析。
通过Simulink,用户可以轻松地构建复杂数字信号处理、控制系统以及通信系统等。
Simulink 提供了丰富的库和工具,可以满足各种建模需求。
二、Simulink 中的数学公式建模在Simulink 中,用户可以通过数学公式建模的方式来描述系统的动态行为。
Simulink 支持各种数学公式,如代数表达式、微积分方程、传递函数等。
这些数学公式可以用于描述系统的输入输出关系、状态变量更新等。
1.代数表达式:Simulink 提供了许多基本的算术运算符,如加法、减法、乘法、除法等,用户可以利用这些运算符构建代数表达式。
2.微积分方程:Simulink 中的微积分方程建模功能可以帮助用户轻松地构建连续时间系统。
用户可以在Simulink 中直接编写微分方程,或者使用MATLAB 中的符号运算功能进行建模。
3.传递函数:Simulink 提供了丰富的传递函数库,用户可以直接从库中选择合适的传递函数进行建模。
传递函数可以用于描述线性时不变系统(LTI)的输入输出关系。
三、Simulink 数学公式建模的应用实例下面以一个简单的例子来说明如何在Simulink 中使用数学公式建模。
假设我们要建模一个一阶滞后系统,其数学模型可以表示为:y(t) = x(t) + β* x(t - 1)其中,x(t) 是输入信号,y(t) 是输出信号,β是系统参数。
在Simulink 中,可以按照以下步骤进行建模:1.打开Simulink,创建一个新的模型。
2.从Simulink 库中添加所需的组件,如常数、加法器、存储器等。
S-函数

MEX-file S-函数流程
了解Simulink如何与S-函数相互作用完成动 态系统的仿真对用户编写 S- 函数是非常有帮助 的。前面已经对此进行了介绍,不同的是C MEX S-函数的流程控制更为精细,数据I/O也更 为丰富,但是这里还有一些前面没有涉及到的 内容。
1.3 S-函数的分类
M-file S-函数
优点
简单容易上手 可以调用Matlab里的工具
MEX-file S-函数
优点
执行速度快 可以调用任何开源代码 能够访问操作系统接口
缺点
比较慢 不太适合软件开发
缺点
对初学者比较难
1.3.1 M-file S-函数
图9.6 M文件S-函数流程
M-file S-函数模板
S-函数
1
2
3
4
1.1
S-函数的概念
1.2
S-函数的工作原理
1.3
S-函数的分类
1.4
S-函数的实例
引言
S-函数作为与其他语言相结合的接口,可以使用这个语 言所提供的强大能力。例如, MATLAB 语言编写的 丰富资源,方便地调用各
种工具箱函数和图形函数;使用C语言编写的S-函数则可以 实现对操作系统的访问,如实现与其它进程的通信和同步
S-函数数据交换
S-函数的数据交换过程
1.4 S-函数的实例
例题: 编写一个 S-函数,说明人口的动态变化。设人口出生率为 r,资 源为 K ,初始人口数量为 init ,则人口变化规律为: p(n)=r*p(n-1)*(1-p(n1)/K),p(0)=init。 解:(1) 修改M文件S-函数主函数:
等。
1.1
simulink中trigonometric用法

simulink中trigonometric用法Simulink是一款功能强大的工具,它可以用来建模、仿真和分析各种系统。
其中,trigonometric函数是Simulink中常见的一个函数,其用法也是比较广泛的。
本文将从trigonometric函数的介绍、使用和应用三方面对其进行详细介绍。
一、trigonometric函数的介绍trigonometric函数是Simulink中用于计算三角函数的函数。
这些函数包括sin、cos、tan等,它们都是在Simulink中内置的函数。
这些函数可以用于将模拟系统中的角度转换为其正弦、余弦和正切值。
二、trigonometric函数的使用在Simulink中使用trigonometric函数需要使用Math Operations 库。
在建立模型时,可以通过单击Library Browser上的Math Operations库将其添加到模型中。
然后,在建立模型时,可以从Math Operations库中选择trigonometric函数,例如sin函数。
三、trigonometric函数的应用trigonometric函数在许多不同的应用程序中都有广泛的应用。
例如,在电力电子中,它们可以用于计算AC电池的相位。
在机械和结构工程中,它们可以用于计算机器人和机械臂的位置和方向。
此外,trigonometric函数还可以用于处理信号,例如将声音信号转换为频谱图,或者将图像信号转换为灰度值。
总之,trigonometric函数是Simulink中非常重要的一个函数,它可以用于不同领域的模型建立和分析中,特别是在应用数学和工程领域。
如果您是一名工程师或数学家,掌握trigonometric函数的使用将有助于您更好地理解和应用Simulink技术。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2004-08-20
基金项目:郑州航空工业管理学院青年基金资助项目(Q02308)作者简介:路 玲(1964-),女,河南洛阳人,硕士,从事计算机应用教学与研究工作,副教授。
Simulink 中S 函数在仿真建模中的应用
路 玲,陈建辉,李 琳
(郑州航空工业管理学院,河南 郑州 450015)
摘 要:利用S 函数可便捷地创建用户所需模型,因为利用S 函数可创建一个通用模块,在不同条件下只
需修改其参数即可被不同场合使用。
文章在论述S 函数功能和创建方法的基础上,结合实例介绍M 形式S 函数的应用。
关键词:S imulink ;S 函数;仿真建模;应用
中图分类号:TP273 文献标识码:C 文章编号:1009-1750(2004)06-0182-02
使用计算机仿真具有可缩短研究周期、节省费用、不受外部环境的限制等优势。
长期以来,仿真领域的研究重点是仿真模型建立。
目前较流行的仿真工具之一是M AT 2
LA B ,它在继承和发展原有数值计算和图形可视能力的同
时,提供了S imulink ,一个交互式操作的动态系统建模、仿真、分析集成环境,使系统从模型建立到仿真结果的分析变得简单,易操作。
尽管S imulink 已提供了十分丰富的模型库,如S imulink 模型库、通信模型库、数字信号模型库,等等,但在实际系统建模时,我们会遇到一些特殊的环节,它们不能或者难以用给定的模型来描述,在这种情况下,
S imulink 中的扩展工具S 函数就会发挥其独特效用。
一、S 函数功能
S 函数(S —Function ),或称系统函数(System Function )是
用户借以自建的S imulink 模块所必需的,具有特殊调用格式的函数文件。
利用S imulink 中提供的S 函数模板进行适当的“剪裁”,就可根据实际建模的需要,建立用户所需的模型。
S 函数主要适用以下场合:生成用户在研究中有可能
经常反复使用的S 函数模块、生成某硬件装置的S 函数模块、将已存的C 码程序构造成S 函数模块、为一组数学方程所描写的系统,建立一个专门的S 函数模块、构件用于图形动画表现的S 函数模块。
使用S 函数的优点是可以创建一个通用模块,使用时,只需改变其参数,就可以在不同条件下多次重用。
二、S 函数创建方法‘
创建S 函数有两个独立的任务:一是初始化模块特性,包括输入、输出个数、连续和离散状态初始条件以及采样时间;另一个是将算法放在合适的S 函数子程序中。
实际上,
S imulink 的每一个模型都可以用输入、输出、状态三个要素
进行描述,S 函数的描述也同样遵循这一原则。
从本质上讲S 函数是对一个动态系统的计算机程序语言描述,S 函数一旦被正确的嵌入S imulink 标准模型库中的S —Function 框架模块中,它就可以像其他S imulink 标准模型一样,与
S imulink 方程解算器交互,实现对应功能。
S 函数有两种形式:一是直接用M 函数文件编制的M
形式S 函数;另一种是以C 语言实现的C MEX 形式S 函数。
对于前者,S 函数程序是作为M 文件的子程序的形式实现的,S imulink 传递一个标志参数给S 函数,该标志表示当前的仿真阶段,必须编写M 代码调用合适的函数以得到每一个标志的值;对于后者,S imulink 直接调用S 函数程序。
表1列出了各个仿真阶段、相应的函数程序和相关的M 形式S 函数的标志位。
表1 仿真阶段
仿真阶段S 函数程序标志(M 文件形式的S 函数)
初始化mdiInitializeS izes flag =0计算下一个采样点(可选)mdiG etT ime O fNextVarHit flag =4计算输出mdiOutputs flag =3更新离散状态mdlUpdate flag =2计算导数mdlDerivatives flag =1仿真任务结束
mdlT erm inate
flag =9
S imulink 提供了两种文件形式的标准模版程序。
M 文件形式的名为S funtm pl.m ,存放在M AT LAB 软件根目录上的
toolbox \simulink \block 子目录下,C MEX 形式的名为S funtm pl.位于csimulink \src 目录中。
在开发S 函数时可采
用M 文件或C MEX 文件模版。
三、M 形式的S 函数的应用
对于M 形式的S 函数开发步骤是对系统提供的标准模
・
281・第23卷第6期2004年12月郑州航空工业管理学院学报(社会科学版)
Journal of Zhengzhou Institute of Aeronautical Industry Management (S ocial Science Edition )V ol.23N o.62004.12
版程序进行适当“剪裁”,生成用户自己的S 函数。
然后把S 函数嵌入到S imulink 提供的S -Function 框架标准模块中,生成自己的S 函数模块,如需要可对S 函数模块进行适当封装。
这里给出M 形式的S 函数一实例,S 函数模块接受一个标量信号的输入并将它乘以2,如图1所示。
图1 使用S 函数模块的示例模型
下面是timestw o.m 模块的M 文件代码
function [sys ,x0,str ,ts]=timestw o (t ,x ,u ,flag )s witch flag ,case 0,
[sys ,x0,str ,ts]=mdlInitializeS izes ;%Initialization case 3;
sys =mdlOutputs (t ,x ,u );%caculate Outputs case{1,2,4,9}
sys =[];%unused flags otherwise
error[’Unhandled flag =’,num2str (flag )];%Error han 2dling
S imulink 结合S 函数的头四个输入参数必须是变量t ,x ,u ,和flag ,flag 控制在每一个仿真阶段调用哪个S 函数子
程序的参数。
下面是timestw o.m 调用的S 函数子程序:
function[sys ,x0,str ,ts]=mdlinitializeS izes sizes =simsizes ;sizes.NumC ontS tates =0;sizes.NumDiscS tates =0;
sizes.NumOutputs =1;
sizes.NumInputs =1;sizes.DirFeedthrough =0;sizes.NumSam pleT imes =1;sys =simsizes (S izes );x0=[];str =[];ts =[-10];
function sys =mdlOutputs (t ,x ,u );sys =2umethords ;
要在S imulink 中测试该S 函数,在S 函数模块的输入连接一个正弦波生成器,将其输出连接到一个Scope 模块即可以运行仿真。
利用S 函数可以创建一个通用模块,在不同条件下只需修改其参数即可被不同场合使用,为系统仿真模型建立提供了便利。
另外S 函数还可被编写成支持任意的输入宽度,S 函数的采样率可以是单采样或多采样率,通过S 函数还可传递附参数,等等。
S 函数为参数化和扩展的S imulink 能力提供了一种强大的机制,为复杂系统建立模型奠定了基础,提供了方便。
参考文献:
[1]陈桂明,张明照,等.应用M AT LAB 建模与仿真[M].北京:科学
出版社,2000.
[2]张志涌,等.精通M AT LAB 6.5版[M].北京:北京航空航天出版
社,2003.
[3]王沫然.SI M U LINK 4建模及动态仿真[M].北京:电子工业出版
社,2002.
Application of S -Function in Simulink to Simulation Model
L U ling ,CHEN Jian 2hui ,LI Lin
Abstract :S -Function can be made use of for user m odel easily.Utilize it to establish a piece of m odel in comm on
use.The m odel can be used by different occasions under different condition as long as it revise its parameter.In this paper ,on the basis of discussing the main usages and analyzing established of S -Function ,a S -Function will be given in form of M file according to actual exam ple.
K ey w ords :simulink ;S -Function ;simulation m odel ;application
・
381・路 玲:S imulink 中S 函数在仿真建模中的应用。