simulink实例(有好多实例)
matlab simulink案例

matlab simulink案例1. 电机传动系统模拟在这个案例中,我们将使用Simulink来模拟一个简单的电机传动系统。
我们将建立一个由电机、负载和控制器组成的系统,并使用Simulink来模拟系统的动态行为。
通过调整输入信号和控制器参数,我们可以观察系统的响应,并优化控制器的性能。
2. PID控制器设计在这个案例中,我们将使用Simulink来设计一个PID控制器,并将其应用于一个简单的控制系统。
我们将建立一个由传感器、控制器和执行器组成的系统,并使用Simulink来模拟系统的动态行为。
通过调整PID控制器的参数,我们可以观察系统的响应,并优化控制器的性能。
3. 机器人路径规划在这个案例中,我们将使用Simulink来进行机器人的路径规划。
我们将建立一个由传感器、路径规划器和执行器组成的系统,并使用Simulink来模拟机器人在不同环境中的路径规划行为。
通过调整路径规划器的算法和参数,我们可以优化机器人的路径规划性能。
4. 电力系统稳定性分析在这个案例中,我们将使用Simulink来进行电力系统的稳定性分析。
我们将建立一个由发电机、负载和传输线路组成的电力系统,并使用Simulink来模拟系统的动态行为。
通过调整系统的参数和控制策略,我们可以评估系统的稳定性,并优化系统的运行性能。
5. 汽车动力学模拟在这个案例中,我们将使用Simulink来进行汽车的动力学模拟。
我们将建立一个由车辆、发动机和传动系统组成的模型,并使用Simulink来模拟车辆在不同驾驶条件下的动力学行为。
通过调整车辆参数和控制策略,我们可以评估车辆的性能,并优化驾驶体验。
6. 无人机飞行控制在这个案例中,我们将使用Simulink来进行无人机的飞行控制。
我们将建立一个由无人机、传感器和控制器组成的系统,并使用Simulink来模拟无人机在不同飞行任务下的控制行为。
通过调整控制器的参数和飞行任务的要求,我们可以优化无人机的飞行性能。
simulink实例——超实用

2
33
基
Simulink仿真实例
2
34
基
Simulink仿真实例
2
35
基
2
2
基
Simulink仿真实例
2
3
基
Simulink仿真实例
例题2,力-质量系统,要拉动一个箱子 (拉力f=1N),箱子质量为M(1kg),箱子与地 面存在摩擦力[(b=0.4N(/m/s)],其大小与车 子的速度成正比。
2
4
基
Simulink仿真实例
其运动方程式为
f bx Mx
拉力作用时间为2s,建构的模型为
南京航空航天大学
基于MATLAB/SIMULINK的系 统建模与仿真
任课教师:刘燕斌 二○一零年三月
1
Simulink仿真实例
例题1,使用Simulink创建系统,求解非 线性微分方程 (3x 2x2 )x 4x 4x.其初始 值为 x(0) 0, x(0) 2,绘制函数的波形.
创建仿真系统为
自由下落的物体满足牛顿运动定 律:F=ma.假设绳子的弹性系数为k, 它的拉伸影响系统的动力响应,如果 定义人站在桥上时绳索下端的初始位 置为0位置,x为拉伸位置,那么用b(x) 表示绳子的张力。
2
13
基
Simulink仿真实例
kx, x 0
b(x)
0, x 0
设m为物体的质量,g是重力加速度, a1,a2是空气阻尼系数,系统方程可以 表示为
2
26
基
Simulink仿真实例
2
27
基
Simulink仿真实例
例题8,建立一个积分器,输入为1,初 始条件为-50,如果输出超过20,则重置为100。
二分法 simulink 案例

二分法 simulink 案例
在Simulink中,二分法可以用于解决一些非线性方程的求解问题。
下面是一个简单的例子:
假设我们要解的方程是 f(x) = x^3 - x - 1 = 0,我们可以使用二分法来寻找这个方程的根。
步骤如下:
1. 首先,在Simulink的库浏览器中找到并打开“Continuous”库,然后拖动“Gain”模块到模型中。
2. 在“Gain”模块的参数设置中,将“Gain”设置为-1,表示我们要对输入信号进行负反馈。
3. 接下来,我们需要添加一个比较模块来比较f(x)和0。
在库浏览器中找到并打开“Logic and Bit Operations”库,然后拖动“Relay”模块到模型中。
4. 右键点击“Relay”模块,选择“Mask Subsystem”,然后在新打开的窗口中添加一个“Gain”模块和一个“Scope”模块。
5. 将“Gain”模块的“Gain”设置为1,表示我们要对输入信号进行正反馈。
将“Scope”模块的“Sample time”设置为-1,表示该模块会一直输出信号。
6. 连接好模块后,运行模型。
观察Scope模块的输出,可以看到随着时间的推移,输出信号逐渐接近于0,最终会稳定在0处。
这个例子中,我们使用了二分法来逼近方程的根。
具体来说,我们选择两个初始点a和b,然后反复将区间[a, b]分成两半,取中间点c,如果f(c)与0的符号相同,则说明根在[a, c]之间,否则根在[c, b]之间。
不断重复这个过程,最终可以找到方程的根。
simulink建模实例
simulink建模实例Simulink是一种功能强大的工具,用于建立和模拟各种系统的动态行为。
它可以帮助工程师和科学家更好地理解和分析系统的行为,并进行系统设计和优化。
下面我将通过一个实例来展示Simulink的应用。
假设我们要建立一个控制系统,用于控制一个小型机器人的移动。
该机器人有两个驱动轮,我们希望能够通过Simulink来设计一个控制器,使机器人能够按照预定的路径移动。
我们需要建立一个系统模型,包括机器人本身、传感器和执行器。
在Simulink中,我们可以使用各种模块来表示这些组件,并使用连线连接它们。
例如,我们可以使用“转向模块”来表示机器人的转向系统,使用“速度模块”来表示机器人的速度控制系统。
接下来,我们需要定义机器人的运动路径。
在Simulink中,我们可以使用“路径生成器”模块来定义路径。
通过调整路径生成器的参数,我们可以创建各种形状的路径,例如直线、曲线等。
然后,我们需要设计一个控制器,将路径信息转换为机器人的运动指令。
在Simulink中,我们可以使用“控制器模块”来实现这一功能。
该模块可以根据路径信息和机器人的当前位置,计算出机器人应该采取的行动,例如转向角度和速度。
我们需要将控制指令发送给机器人的执行器,以实现机器人的移动。
在Simulink中,我们可以使用“执行器模块”来模拟执行器的行为。
该模块可以将控制指令转换为实际的电压或力矩信号,驱动机器人的驱动轮进行运动。
通过上述步骤,我们就建立了一个完整的机器人控制系统模型。
我们可以在Simulink中进行仿真,观察机器人在不同路径和控制策略下的运动行为。
通过调整模型中各个组件的参数,我们可以进行系统性能的优化和改进。
Simulink是一个强大的工具,可以帮助我们建立和模拟各种系统的动态行为。
通过Simulink,我们可以更好地理解和分析系统的行为,并进行系统设计和优化。
在实际工程中,Simulink的应用广泛,并在控制系统、信号处理等领域发挥着重要作用。
simulink例子
simulink例子Simulink是MATLAB的一个附加组件,主要用于对动态系统进行模拟和仿真。
以下是一个简单的Simulink示例,描述了一个简单的控制系统:假设我们有一个火车过桥的问题,其中有两根铁轨,一根用于火车顺时针行走,另一根用于火车逆时针行走。
在铁轨的某一点上有一座桥,但是桥的宽度不足以容纳两根铁轨。
因此,当火车通过这座桥时,我们需要控制哪一辆火车可以在特定的时间内通过桥。
为了解决这个问题,我们在桥的两端各放置了一个信号灯。
如果西边的信号灯是绿色的,那么允许一辆从西边驶来的火车进入桥上;如果信号灯是红色的,那么该方向驶来的火车必须等待。
东边的信号灯以同样的方式控制东边驶来的火车。
在Simulink中,我们可以使用模块来表示火车、信号灯和控制器等元素。
例如,我们可以使用一个“Source”模块来表示火车的行驶,使用“Logic”模块来表示信号灯的状态,使用“Sink”模块来表示火车的输出等。
具体来说,我们可以按照以下步骤来建立这个控制系统的Simulink模型:1. 打开Simulink,并创建一个新的模型。
2. 在模型中添加一个“Sine Wave”模块作为火车的源,设置其频率和幅度等参数。
3. 添加一个“Logic Switch”模块作为信号灯的状态转换器,设置其输入和输出等参数。
4. 添加一个“Scope”模块作为输出显示,设置其采样时间和显示范围等参数。
5. 使用线连接各个模块的输入和输出端口,形成完整的控制系统模型。
6. 设置模型的仿真时间、步长等参数,并运行仿真。
7. 查看仿真结果,包括信号灯的状态和火车的输出等。
以上是一个简单的Simulink示例,用于描述一个控制系统的模拟和仿真。
Simulink具有丰富的模块库和强大的仿真功能,可以用于研究和设计各种动态系统。
simulink实例(有好多实例)

Simulink仿真实例
运动方程式为
M x k x b x 0
构建的模型为
--精品--/SIMULINK的系统建模与仿真
Simulink仿真实例
因有阻尼器存在,故箱子最终会停止运 动。
--精品--/SIMULINK的系统建模与仿真
Simulink仿真实例
Simulink仿真实例
一旦x和它的导数已经搭好,就可以使用 一个增益模块表示空气阻力比例系数,使用 Function模块表示空气阻力中的非线性部分。
--精品--/SIMULINK的系统建模与仿真
Simulink仿真实例
b(x)是通过门槛为0的x条件式确定的, 可以使用一个Switch模块来实现判断条件。
Simulink仿真实例
其运动方程式为
f bxMx
拉力作用时间为2s,建构的模型为
--精品--/SIMULINK的系统建模与仿真
Simulink仿真实例
因有摩擦力存在,箱子最终将会停止前 进。
--精品--/SIMULINK的系统建模与仿真
Simulink仿真实例
例题3,力-弹簧-阻尼系统,假设箱子与地面无 摩擦存在,箱子质量为M(1kg),箱子与墙壁间有线 性弹簧(k=1N/m)与阻尼器(b=0.3N/ms-1)。阻尼器主 要用来吸收系统的能量,吸收系统的能量转变成热 能而消耗掉。现将箱子拉离静止状态2cm后放开,试 求箱子的运动轨迹。
--精品--/SIMULINK的系统建模与仿真
Simulink仿真实例
最终系统Simulink模型方块图为
--精品--/SIMULINK的系统建模与仿真
Simulink仿真实例
仿真过程中,设绳索长度-30m,起始速度 为0;物体质量为90kg,g为9.8m/s2,弹性系 数k为20,a1和a2均为1.
六个实战示例--自动控制理论--Simulink仿真

自动控制理论仿真实验指导书目录实验一典型环节的MATLAB仿真 (3)一、实验目的 (3)二、SIMULINK的使用 (3)三、实验原理 (5)四、实验内容 (8)五、实验报告 (8)六、预习要求 (8)实验二线性系统时域响应分析 (8)一、实验目的 (8)二、基础知识及MATLAB函数 (9)三、实验内容 (18)四、实验报告 (19)五、预习要求 (19)实验三线性系统的根轨迹 (20)页脚内容1一、实验目的 (20)二、基础知识及MATLAB函数 (20)三、实验内容 (26)四、实验报告 (27)五、预习要求 (27)实验四线性系统的频域分析 (28)一、实验目的 (28)二、基础知识及MATLAB函数 (28)三、实验内容 (33)四、实验报告 (34)五、预习要求 (34)实验五线性系统串联校正 (35)一、实验目的 (35)二、基础知识 (35)三、实验内容 (45)四、实验报告要求 (45)五、预习要求 (46)页脚内容2实验六数字PID控制 (46)一、实验目的 (46)二、实验原理 (46)三、实验内容 (49)四、实验报告 (50)五、预习要求 (50)实验一典型环节的MATLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MATLAB软件,在命令窗口栏“>>”提示符下键入simulink命令,按Enter键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个simulink仿真环境常规模板。
simulink仿真简单实例
simulink仿真简单实例
一、模拟环境
1、MATLAB/Simulink 设计环境:
在MATLAB中开发Simulink模型,仿真模拟系统,开发系统塑造都可以在这个环境下进行。
2、LabVIEW 设计环境:
LabVIEW允许你以基于可视化技术的开发环境(VI)来创建测试,模拟,监控系统,以及自动化系统的可视化界面。
二、仿真实例
1、基于MATLAB/Simulink的仿真实例:
(1)传统的PID控制器
这是一个利用PID控制器控制速度的例子。
首先,建立一个简单的Simulink模型,包括PID控制器、电机和反馈器件。
之后,你可以调整PID参数,以提高系统的控制能力。
(2)智能控制
这是一个基于智能控制算法的实例。
通过使用神经网络,试图根据输入自动调整PID参数,使系统具有更强的控制能力。
2、基于LabVIEW的仿真实例:
(1)叉车仿真
这是一个使用LabVIEW来模拟电动叉车运行过程的实例。
你可以模拟叉车的启动过程,叉车行驶过程,并开发出任意的叉车控制算法。
(2)汽车仿真
这是一个使用LabVIEW进行汽车模拟的实例。
你可以模拟汽车的动力性能,并开发出任意类型的汽车控制算法,如路径规划算法,自动驾驶算法等。
基于simulink的系统仿真实验报告(含电路、自控、数电实例)
《系统仿真实验》实验报告目录一《电路》仿真实例 (3)2.1 简单电路问题 (3)2.1.1 Simulink中仿真 (3)2.1.2 Multisim中仿真 (4)2.2 三相电路相关问题 (5)二《自动控制原理》仿真实例 (7)1.1 Matlab绘图 (7)三《数字电路》仿真实例 (8)3.1 555定时器验证 (8)3.2 设计乘法器 (9)四实验总结 (11)一《电路》仿真实例2.1 简单电路问题课后题【2-11】如图所示电路,R0=R1=R3=4Ω,R2=2Ω,R4=R5=10Ω,直流电压源电压分别为10V、4V、6V,直流电流源电流大小为1A,求R5所在的支路的电流I。
(Page49)解:simulink和multisim都是功能很强大的仿真软件,下面就以这个简单的习题为例用这个两个软件分别仿真,进一步说明前者和后者的区别。
2.1.1 Simulink中仿真注意事项:由于simulink中并没有直接提供DC current source,只有AC current source,开始的时候我只是简单的把频率调到了0以为这就是直流电流源了,但是并没有得到正确的仿真结果。
后来问杨老师,在老师的帮助下发现AC current source的窗口Help中明确的说明了交流变直流的方法:A zero frequency and a 90 degree phase specify a DC current source.然后我把相角改成90度后终于得到了正确的仿真结果,Display显示I=0.125A,与课本上答案一致。
2.1.2 Multisim中仿真结果:I=125mA=0.125A(因为电流表探针电压电流比是1V/mA)。
2.2 三相电路相关问题【例】三相电路实际连接图如下所示,是通过功率表和电流的读数,验证课本上的相关结论。
解:Multisim中电路图连接如下所示:解:观察各支路的功率和功率因素,验证了以下几点结论:(1)只有纯阻性支路的功率因素为1;(2)纯感性或纯容性支路的功率因素为0,有功功率也为0;(3)混合支路的(容阻、感阻、容感阻)功率因素在0到1之间。
4 Simulink仿真举例
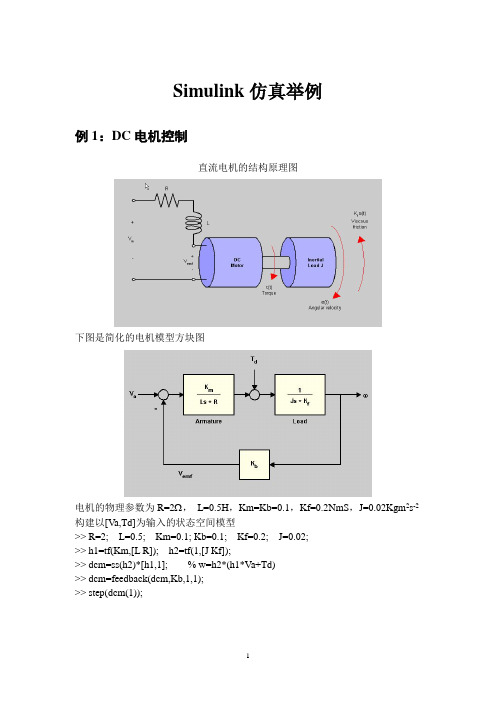
Simulink仿真举例例1:DC电机控制直流电机的结构原理图下图是简化的电机模型方块图电机的物理参数为R=2 ,L=0.5H,Km=Kb=0.1,Kf=0.2NmS,J=0.02Kgm2s-2构建以[V a,Td]为输入的状态空间模型>> R=2; L=0.5; Km=0.1; Kb=0.1; Kf=0.2; J=0.02;>> h1=tf(Km,[L R]); h2=tf(1,[J Kf]);>> dcm=ss(h2)*[h1,1]; % w=h2*(h1*V a+Td)>> dcm=feedback(dcm,Kb,1,1);>> step(dcm(1));前馈控制系统的结构前馈控制增益>>Kff=1/dcgain(dcm(1));dcgain()用于计算线性时不变系统模型的稳态增益。
为了评价在负载扰动下前馈控制的性能,我们对忽加负载(在t=5s 到t=10s 之间引入Td=-0.1Nm 的负载)条件下,系统的输出响应进行仿真。
>> t=0:0.1:15;>> Td=-0.1*(t>5&t<10); >> u=[ones(size(t)); Td]; >> cl_ff=dcm*diag([Kff,1]); >> lsim(cl_ff,u,t);051015Linear Simulation ResultsTime (sec)A m p l i t u d e扰动条件下的前馈转速跟踪控制显然,前馈控制在不能有效的消除扰动对转速调节影响。
控制器采用积分控制器C(s)=K/sK 为积分增益系数。
反馈控制系统的结构图为确定增益系数K ,采用根轨迹的方法,首先绘制开环系统的根轨迹: rlocus(tf([1], [1 0])*dcm(1)) 选择K=5;Real AxisI m a g i n a r y A x i s系统的开环根轨迹将这种反馈控制方法与上面的前馈控制方法进行比较 >>K=5;>>C=tf(K,[1,0]);>>cl_rloc=feedback(dcm*append(C,1),1,1,1); >>lsim(cl_ff,cl_rloc,u,t);051015Linear Simulation ResultsTime (sec)A m p l i t u d e反馈控制与前馈控制的比较显然在负载扰动条件下反馈控制优于前馈控制(3)LQR 控制为了进一步提高闭环控制性能,我们设计一个线性二次型调节器(LQR )来实现对DC 电机的闭环控制,LQR 闭环控制系统的结构如下图所示LQR 闭环控制系统的结构除了采用积分误差之外,LQR 控制还使用状态变量x=[i, w]来综合一个控制量V aV a=K1*w+K2*w/s+K3*i其中i 是电枢电流。
simulink实例(有好多实例)解析

Simulink仿真实例
仿真曲线为
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
假设未伸长时绳索的端部距地面为50m, 为了得到更真实的曲线,将50减去输出位置
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2018年11月1日星期四 基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
kx, x 0 b( x ) 0, x 0
设m为物体的质量,g是重力加速度, a1,a2是空气阻尼系数,系统方程可以 表示为
mg b( x) a1 x a2 x x m x
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
其运动方程式为
M f bx x
拉力作用时间为2s,建构的模型为
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
因有摩擦力存在,箱子最终将会停止前 进。
2018年11月1日星期四 基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink简例

2021/6/20
33
4.双自由度无阻尼振动
• 参数设置: 令k1=1,k2=2,k3=4 m1=1,m2=2
• 初始状态: 初始速度为0,m1、m2位移均为1
• 在框图中: 分别修改对应模块的数值
2021/6/20
34
4.双自由度无阻尼振动
Scope输出结果为
2021/6/20
35
Scope1输出结果为
2021/6/20
29
3.单自由度有阻尼+正弦激励
• 用到的模块:
正弦波信号模块,产生一个给定 的正弦波信号。
叉乘模块,对输入数据进行相乘 运算。
2021/6/20
混路器,将多路信号按照向量的 形式混合成一路信号。
30
4.双自由度无阻尼振动
双自由度无阻尼系统简图如图所示:
11
2.单自由度有阻尼自由振动
单自由度有阻尼 系统简图如右图 所示:
根据牛顿定律列 出运动微分方程
m x c x k x 0
2021/6/20
12
2.单自由度有阻尼自由振动
微分方程变形为 x k x c x mm
据此在Simulink中画出框图
2021/6/20
dan_zu_2 13
② 在质量沿坐标正向有一位移的情况 下考察质量的受力情况
2021/6/20
5
1.单自由度无阻尼自由振动
微分方程变形为 x k x m
据此在Simulink中画出框图
2021/6/20
dan_wuzu_1
6
1.单自由度无阻尼自由振动
• 参数设置: 令k=100,m=10,
• 初始状态: 初始速度为0,位移为1
matlab的simulink仿真建模举例

matlab的simulink仿真建模举例Matlab的Simulink仿真建模举例Simulink是Matlab的一个工具包,用于建模、仿真和分析动态系统。
它提供了一个可视化的环境,允许用户通过拖放模块来构建系统模型,并通过连接和配置这些模块来定义模型的行为。
Simulink是一种功能强大的仿真平台,可以用于解决各种不同类型的问题,从控制系统设计到数字信号处理,甚至是嵌入式系统开发。
在本文中,我们将通过一个简单的例子来介绍Simulink的基本概念和工作流程。
我们将使用Simulink来建立一个简单的电机速度控制系统,并进行仿真和分析。
第一步:打开Simulink首先,我们需要打开Matlab并进入Simulink工作环境。
在Matlab命令窗口中输入"simulink",将会打开Simulink的拓扑编辑器界面。
第二步:创建模型在拓扑编辑器界面的左侧,你可以看到各种不同类型的模块。
我们将使用这些模块来构建我们的电机速度控制系统。
首先,我们添加一个连续模块,代表电机本身。
在模块库中选择Continuous中的Transfer Fcn,拖动到编辑器界面中。
接下来,我们添加一个用于控制电机速度的控制器模块。
在模块库中选择Discrete中的Transfer Fcn,拖动到编辑器界面中。
然后,我们需要添加一个用于输入参考速度的信号源模块。
在模块库中选择Sources中的Step,拖动到编辑器界面中。
最后,我们添加一个用于显示模拟结果的作用模块。
在模块库中选择Sinks 中的To Workspace,拖动到编辑器界面中。
第三步:连接模块现在,我们需要将这些模块连接起来以定义模型的行为。
首先,将Step模块的输出端口与Transfer Fcn模块的输入端口相连。
然后,将Transfer Fcn模块的输出端口与Transfer Fcn模块的输入端口相连。
接下来,将Transfer Fcn模块的输出端口与To Workspace模块的输入端口相连。
matlABSIMULINK联合仿真经典的例子

数控螺旋面钻头尖刃磨机的机构仿真一、原理图1二并联杆数控螺旋面钻头尖刃磨机床示意图图2 二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图重要假设条件:1、二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a和3,b)保证动平台4只在空间中做水平运动,而没有翻转运动。
每一组并联杆是由空间相互平行的4根杆件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图2。
构件a,b是保证动平台4只做水平运动的辅助平行杆,所以可以假设将机构中杆件a,b省略,而动平台4只做水平移动,没有翻转运动,也就是4相对于地面的夹角θ4恒等于0。
2、直线电机的次子有两个(1和5)但是在加工过程中并不是两者同时运动,所以假设5与导轨固联。
3、假设机床在工作过程中动平台4只受到树直向上的恒力作用,且作用在其中心位置。
基于以上假设机床平面结构示意图如图3。
图3二并联杆数控螺旋面钻头尖刃磨机床简化机构平面结构示意图二、建立仿真方程C2=cos(θ2) S2=sin(θ2) C3=cos(θ3)S3=sin(θ3)一)力方程(分别对各个杆件进行受力分析) 对动平台4:受力分析如图4图4动平台4的受力分析对并联杆2:受力分析如图5图5并联杆2的受力分析 对直线电机滑块1:受力分析如图6图6直线电机滑块1的受力分析对并联杆3:受力分析如图7图7并联杆3的受力分析 二)闭环矢量运动方程(矢量图如图8)图8 闭环矢量图矢量方程为:R 1+R2=R3+R4 将上述矢量方程分解为x 和y 方向,并分别对方程两边对时间t 求两次导数得: r1_do t _dot +r2*α2*S2+r2*w2^2*C2=r3*α3*S3+r3*w3^2*C3 (12) r2*α2*C2-r2*w2^2*S2=r3*α3*C3-r3*w3^2*S3 (13) 三)质心加速度的矢量方程矢量关系:Ac3=Rc3_d o t_do t Ac4=R3_do t_dot + Rc4_d o t_do t Ac2=R3_do t_dot + R4_do t_dot + Rc2_d o t_do t (_dot_d ot 表示对时间求两次导数)将上述三个矢量方程分别分解为x 和y 方向,则它们等效为以下六个方程;Ac3x=-rc3*w3^2*C3-rc3*α3*S3 (14) Ac3y=-rc3*w3^2*S3+rc3*α3*C3 (15) Ac4x=-r3*w3^2*C3-r3*α3*S3 (16) Ac4y=-r3*w3^2*S3+r3*α3*C3 (17) Ac2x=-r3*w3^2*C3-r3*α3*S3-rc2*w2^2*C2-rc2*α2*S2 (18) Ac2y=-r3*w3^2*S3+r3*α3*C3-rc2*w2^2*S2+rc2*α2*C2 (19) 力未知量为:F12x,F12y,F24x,F24y ,F43x,F43y,F13x,F13y,Fy ,Fm 引入的加速度有: α2,α3,r1_do t _dot ,A c3x ,Ac3y ,Ac4x ,Ac4y ,Ac2x ,Ac2y三、系统方程的组装将所有19个方程组装成矩阵形式101000000000020001010000000000200002222222200000020000000000101000000000000400001010000000000004000101000000000000010000000010010000000100000010000000000000010100000000m m rc S rc C rc S rc C I m m m ⋅⋅-⋅-⋅-----3000000001010000000030000003333000003000000000000000002233100000000000000002233000000000000000002233010000000000000002233001000000000000000330001000000000000m m r C r S I r S r S r C r C rc S r S rc C r C rc S ⋅⋅-⋅-⋅⋅-⋅⋅⋅⋅⋅-⋅00330000100000000000003300000100000000003300001rc C r S r C ⎛⎫⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪⋅-⎪⋅ ⎪⎪ ⎪⋅-⎝⎭120120240240434301301300020333^2322^2222^2233^2322^222233441F x F y F x F y F x p F y F x F y Fy Fm r w C r w C r w S r w S rc w C Ac x Ac y Ac x Ac y Ac x Ac y r αα∙∙⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⨯= ⎪ ⎪ ⎪⋅⋅-⋅⋅ ⎪ ⎪⋅⋅-⋅⋅ ⎪-⋅⋅ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭33^2322^2233^2333^2333^2333^2333^23r w S rc w S r w S rc w C rc w S r w C r w S ⎛⎫ ⎪ ⎪ ⎪ ⎪⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪-⋅⋅ ⎪⋅⋅+⋅⋅ ⎪ ⎪-⋅⋅ ⎪ ⎪⋅⋅ ⎪-⋅⋅ ⎪⎪ ⎪⋅⋅⎝⎭ 四、初始条件的设定假设图3位置就是初始位置。
simulink实例

Simulink仿真实例
2017年6月29日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
例题2,力-质量系统,要拉动一个箱子 (拉力f=1N),箱子质量为M(1kg),箱子与地 面存在摩擦力[(b=0.4N(/m/s)],其大小与车 子的速度成正比。
2017年6月29日星期四
Simulink仿真实例
例题8,建立一个积分器,输入为1,初 始条件为-50,如果输出超过20,则重置为100。
2017年6月29日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2017年6月29日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2017年6月29日星期四 基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2017年6月29日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2017年6月29日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2017年6月29日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
仿真过程中,设绳索长度-30m,起始速 度为0;物体质量为90kg,g为9.8m/s2,弹性 系数k为20,a1和a2均为1.
2017年6月29日星期四
基于MATLAB/SIMULINK的系统建模与仿真
2017年6月29日星期四 基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
simulink实例(有好多实例)讲解学习

真2020年3月16日星期一
Simulink仿真实例
真2020年3月16日星期一
Simulink仿真实例
真2020年3月16日星期一
Simulink仿真实例
真2020年3月16日星期一
Simulink仿真实例
运动方程式为
Mx kx bx 0
构建的模型为
真2020年3月16日星期一
Simulink仿真实例
因有阻尼器存在,故箱子最终会停止运 动。
真2020年3月16日星期一
Simulink仿真实例
例题4,下图所示简单的单摆系统,假 设杆的长度为L,且质量不计,钢球的质量为 m.单摆的运动可以以线性的微分方程式来 近似,但事实上系统的行为是非线性的,而 且存在粘滞阻尼,假设粘滞阻尼系数为 bkg/ms-1.
真2020年3月16日星期一
Simulink仿真实例
单摆系统的运动方程式为
mg sin bL mL
选取b=0.03,g=9.8,L=0.8,m=0.3,所构 建的模型
真2020年3月16日星期一
Simulink仿真实例
真2020年3月16日星期一
Simulink仿真实例
例题5:蹦极跳系统:当你系着弹力 绳从桥上跳下来时,会发生什么?这里, 以蹦极跳作为一个连续系统的例子。
Simulink仿真实例
其运动方程式为
f bx Mx
拉力作用时间为2s,建构的模型为
真2020年3月16日星期一
Simulink仿真实例
因有摩擦力存在,箱子最终将会停止前 进。
558 Simulink仿真应用举例

专题九Simulink系统仿真9.4 Simulink仿真应用举例☐蹦极跳系统的Simulink仿真模型☐蹦极跳系统的安全性蹦极跳(Bungee Jumping)系统的建模与仿真采用Simulink对蹦极跳系统进行仿真研究。
要求如下:☐建立蹦极跳系统的Simulink仿真模型。
☐分析蹦极跳系统的安全性,包括:●当弹力绳弹性系数一定时,求蹦极者的安全体重。
●当蹦极者体重一定时,求弹力绳的最小弹性系数。
1.系统分析蹦极者从跳台自由下落,跳台距水面的高度为h,弹力绳的长度为s。
蹦极者受到的力包括自身的重力、弹力绳的张力和空气的阻力。
设k为弹力绳的弹性系数,同时我们定义人站在跳台时弹力绳的下端为坐标原点O,y为蹦极者相对于坐标原点的距离,b(y)表示弹力绳的张力,其数学表达式为:b y=ቊ−ky,y>0 0,y≤0又设m为蹦极者的质量,g为重力加速度,a1与a2为空气阻力系数,则系统方程可表示为这样的方程:mg+b(y)-a1y'-a2y'|y'|=my''其中第3项和第4项表示空气的阻力。
方程的初始条件为y(0)=-s, y'(0)=0,也就是初始速度为0。
2.仿真模型启动Simulink,打开模型编辑窗口。
因为该微分方程包含的导数最高为2阶,所以在仿真模型中需要两个积分器,可以从Simulink的连续系统模块库中,将积分模块添加到模型编辑窗口并实现连接,y的二阶导数经过积分环节后得到y的一阶导数,y的一阶导数经过积分环节后得到y。
空气阻力有两项,都与y的一阶导数,即速度有关。
使用数学运算模块库(Math Operations)中的增益模块表示空气阻力比例系数,使用用户自定义函数模块库(User-defined Functions)中函数(Fcn)模块表示空气阻力中的非线性部分,同时将增益模块和函数模块翻转180度,并确定它们的参数。
另外添加数学运算模块库(Math Operations)中的加法模块,并设置好参数。
Simulink应用示例(讲稿采用)

2012.9.23
Advanced选项卡一般 很少用得到。
2012.9.23
变压器参数设置说明:
变压器的电阻为
变压器的电抗为
2 PU N 135 1102 RT s 2 103 4.08 SN 20000 2 U s % U N 10.5 1102 XT 63.53 100 S N 100 20
2012.9.23
Simulink解决方案
整体方案
2012.9.23
这个滤波模块非 有不可!
2012.9.23
锁死上升段!
下降过程中,即使实际电流已经比设定得下 限值低了,out1端也会输出0,以保证此时 QF的控制端为0,QF仍然处于分断状态。
2012.9.23
2012.9.23
2012.9.23
2012.9.23
反应时差
从逻辑上正式判 明短路已经发生
短路发生时刻
2012.9.23
RMS信号滤波后
比较点下限 460A
比较点上限 520A
RMS信号滤波前
从逻辑上正式判明 短路已经发生
过下限比较点时,Breaker 的com控制端输入信号保持 了正确的输入值0.
2012.9.23
稳态潮流计算结果
2012.9.23
Simulink解决方案
2012.9.23
2012.9.23
2012.9.23
RL r1 L 0.17 50 8.5 X L x1 L 0.4 50 20 XL 20 LL 0.064 H 2 f 314
2012.9.23
1 11.43
的情况
2012.9.23
2012.9.23
Simulink汽车仿真实例

Scope
Scope1
28
实战2:离合器接合/分离模型
仿真曲线:
紫色:发动机输入扭矩 黄色:离合器夹紧力 青色:最大静摩擦扭矩 红色:保持接合的摩擦扭矩
29
实战2:离合器接合/分离模型
仿真曲线:
紫色:主动盘转速 黄色:从动盘转速 青色:接合后转速
30
作业
1、复习各类基本模块; 2、对离合器接合/分离模型进行建模仿真.
必定非零!
34
实战3:防抱死制动系统ABS
Simulink模型精讲
bangbang 控制器原理:
Uk U Um m,,
En a En a
1, Uk 1,
En 0 En 0
制动系液压管路:1阶惯性环节
G(s) 100 TB.s1
35
实战3:防抱死制动系统ABS
仿真曲线:
ctrl=1,ABS制动
车轮角速度曲线 紫色:车轮前进速度折算角速度 黄色:车轮实际角速度
Scope1 yout
33
实战3:防抱死制动系统ABS
基本模块介绍:
1. 传递函数
Transfer Fcn
Continuous
2. 查找表
Lookup TableLoopup Tables
3. 积分器限幅Integrator
Continuous
4. 终止仿真
Stop
Sinks
防止除零而采取的措施: 1.0 – u1 / u2 + u2 == 0 eps
说明
0
0
0
0
保持分离态
0
0
1
1
保持接合态
0
1
0
0
保持分离态
simulink中generated s-function模块例子
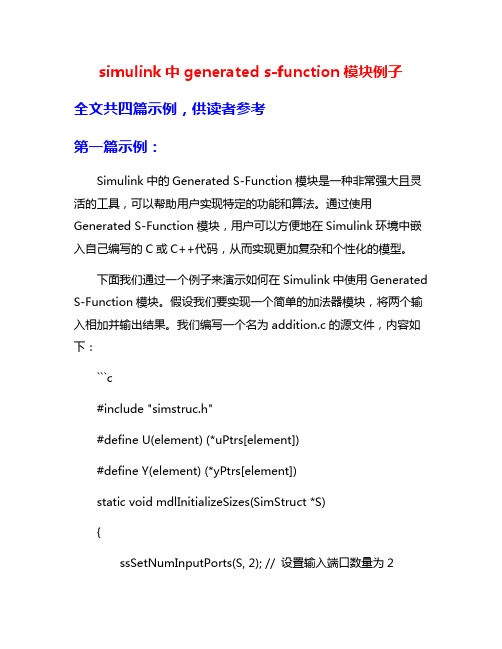
simulink中generated s-function模块例子全文共四篇示例,供读者参考第一篇示例:Simulink中的Generated S-Function模块是一种非常强大且灵活的工具,可以帮助用户实现特定的功能和算法。
通过使用Generated S-Function模块,用户可以方便地在Simulink环境中嵌入自己编写的C或C++代码,从而实现更加复杂和个性化的模型。
下面我们通过一个例子来演示如何在Simulink中使用Generated S-Function模块。
假设我们要实现一个简单的加法器模块,将两个输入相加并输出结果。
我们编写一个名为addition.c的源文件,内容如下:```c#include "simstruc.h"#define U(element) (*uPtrs[element])#define Y(element) (*yPtrs[element])static void mdlInitializeSizes(SimStruct *S){ssSetNumInputPorts(S, 2); // 设置输入端口数量为2ssSetNumOutputPorts(S, 1); // 设置输出端口数量为1ssSetInputPortWidth(S, 0, 1); // 设置第一个输入端口的宽度为1ssSetInputPortDataType(S, 0, SS_DOUBLE); // 设置第一个输入端口的数据类型为doublessSetInputPortWidth(S, 1, 1); // 设置第二个输入端口的宽度为1ssSetInputPortDataType(S, 1, SS_DOUBLE); // 设置第二个输入端口的数据类型为doublessSetOutputPortWidth(S, 0, 1); // 设置输出端口的宽度为1ssSetOutputPortDataType(S, 0, SS_DOUBLE); // 设置输出端口的数据类型为doublessSetNumSampleTimes(S, 1); // 设置采样时间为1ssSetOptions(S, 0); // 设置选项为0}static void mdlInitializeSampleTimes(SimStruct *S){ssSetSampleTime(S, 0, 0.1); // 设置第一个采样时间为0.1ssSetOffsetTime(S, 0, 0.0); // 设置第一个采样时间的偏移为0}static void mdlTerminate(SimStruct *S){// 清理工作}#ifdef MATLAB_MEX_FILE#include "simulink.c"#else#include "cg_sfun.h"#endif```在这个源文件中,我们首先定义了一个addition函数,用来实现两个输入相加的功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
单摆系统的运动方程式为
mL mgsin bL
选取b=0.03,g=9.8,L=0.8,m=0.3,所构 建的模型
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
例题9,重置弹力球。一个弹力球以 15m/s的速度从距水平设置10m的高度抛向空 中,球的弹力为0.8,当球到达球面时,重新 设置其初始速度为0.8x,x是重置时刻球的速 度,即积分器的状态。 球的抛物线运动满足下列公式
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
运动方程式为
kx bx 0 M x
构建的模型为
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
因有阻尼器存在,故箱子最终会停止运 动。
Simulink仿真实例
例题8,建立一个积分器,输入为1,初 始条件为-50,如果输出超过20,则重置为100。
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
例题7,模型和模块的属性中包含回调函 数。下图是蹦极跳的模型方块图,当运行这 个模型时,并不需要设置参数,这是因为蹦 极模型文件中先执行回调函数。
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
例题5:蹦极跳系统:当你系着弹力 绳从桥上跳下来时,会发生什么?这里, 以蹦极跳作为一个连续系统的例子。 自由下落的物体满足牛顿运动定 律:F=ma.假设绳子的弹性系数为k, 它的拉伸影响系统的动力响应,如果 定义人站在桥上时绳索下端的初始位 置为0位置,x为拉伸位置,那么用b(x) 表示绳子的张力。
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
b(x)是通过门槛为0的x条件式确定的, 可以使用一个Switch模块来实现判断条件。
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
最终系统Simulink模型方块图为
2014年8月17日星期日 基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
例题3,力-弹簧-阻尼系统,假设箱子与地面无 摩擦存在,箱子质量为M(1kg),箱子与墙壁间有线 性弹簧(k=1N/m)与阻尼器(b=0.3N/ms-1)。阻尼器主 要用来吸收系统的能量,吸收系统的能量转变成热 能而消耗掉。现将箱子拉离静止状态2cm后放开, 试求箱子的运动轨迹。
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
其运动方程式为
M f bx x
拉力作用时间为2s,建构的模型为
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
因有摩擦力存在,箱子最终将会停止前 进。
2014年8月17日星期日 基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
在MATLAB中建立这个方程的Simulink模 型,这里需要使用两个积分器。
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
一旦x和它的导数已经搭好,就可以使用 一个增益模块表示空气阻力比例系数,使用 Function模块表示空气阻力中的非线性部分。
Simulink仿真实例
仿真曲线为
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
假设未伸长时绳索的端部距地面为50m, 为了得到更真实的曲线,将50减去输出位置
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2014年8月17日星期日 基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
仿真过程中,设绳索长度-30m,起始速 度为0;物体质量为90kg,g为9.8m/s2,弹性 系数k为20,a1和a2均为1.
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
例题2,力-质量系统,要拉动一个箱子 (拉力f=1N),箱子质量为M(1kg),箱子与地 面存在摩擦力[(b=0.4N(/m/s)],其大小与车 子的速度成正比。
2014年8月17日星期日 基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
例题4,下图所示简单的单摆系统,假 设杆的长度为L,且质量不计,钢球的质量为 m.单摆的运动可以以线性的微分方程式来 近似,但事实上系统的行为是非线性的,而 且存在粘滞阻尼,假设粘滞阻尼系数为 bkg/ms-1.
仿真曲线为
可以看到,眺跃者已经撞到了地上。
2014年8月17日星期日 基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
例题6,通过例题5的仿真,可以看 到,跳跃者的身体碰到了地面上!现在 想选择一个安全的绳索,编写一个脚本 文件尝试不同的弹性常数,以保证90千 克重的身体安全的最小弹性常数值。 首先在例1模型中添加一个output模 块,并将模型文件保存为bungee_cmd, 然后建立一个脚本文件试验不同的k值, 当地面的距离为正时停止仿真。
南京航空航天大学
基于MATLAB/SIMULINK的系 统建模与仿真
任课教师:刘燕斌 二○一零年三月
Simulink仿真实例
例题1,使用Simulink创建系统,求解非 4 x 4 .其初始 线性微分方程 (3x 2 x 2 ) x x 值为 x (0) 0, x(0) 2 ,绘制函数的波形. 创建仿真系统为
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
imulink仿真实例
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2014年8月17日星期日
基于MATLAB/SIMULINK的系统建模与仿真
2014年8月17日星期日 基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
kx, x 0 b( x ) 0, x 0
设m为物体的质量,g是重力加速度, a1,a2是空气阻尼系数,系统方程可以 表示为
mg b( x) a1 x a2 x x m x
v v0 gt , v0 15m / s h v 0.5 gt , h0 10m
2
2014年8月17日星期日 基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
其中, v 为球的速度, v0 为球的初始速 度, g 为重力加速度, h 为球从起始位置开 始的高度, h0 为球的初始高度,即球距地面 的高度,因此球距地面的实际高度为 h h0 。