Simulink建模仿真实例详解
matlab的simulink仿真建模举例 -回复
matlab的simulink仿真建模举例-回复Matlab的Simulink仿真建模举例Simulink是Matlab附带的一款强大的仿真建模工具,它能够帮助工程师们通过可视化的方式建立和调试动态系统模型。
Simulink通过简化传统的数学模型建立过程,使得工程师们能够更加直观地理解和分析复杂的系统。
在本文中,我们将介绍一个关于电机控制系统的Simulink仿真建模的例子。
一、了解电机控制系统在开始建模之前,我们首先需要了解电机控制系统的基本原理。
电机控制系统通常包括输入、电机和输出三个主要部分。
输入通常是来自于传感器或用户的命令信号,例如转速、位置或力矩。
电机是通过接受输入信号并根据特定的控制算法生成输出信号。
输出信号通常是电机的转速、位置或功率等。
控制算法通常采用比例-积分-微分(PID)控制或者其他控制算法。
二、建立Simulink模型1. 创建新的Simulink模型在Matlab主界面中,选择Simulink选项卡下的“New Model”创建一个新的Simulink模型。
2. 添加输入信号在Simulink模型中,我们首先需要添加输入信号模块。
在Simulink库浏览器中选择“Sources”类别,在右侧面板中找到“Step”模块,并将其拖放到模型中。
3. 添加电机模型接下来,我们需要将电机模型添加到Simulink模型中。
Simulink库浏览器中选择“Simscape”类别,在右侧面板中找到“Simscape Electrical”子类别,然后找到“Simscape模型”模块,并将其拖放到模型中。
4. 连接输入信号和电机模型将输入信号模块的输出端口与电机模型的输入端口相连,以建立输入信号与电机模型之间的连接。
5. 添加输出信号模块在Simulink模型中,我们还需要添加输出信号模块。
在Simulink库浏览器中选择“Sinks”类别,在右侧面板中找到“Scope”模块,并将其拖放到模型中。
simulink建模实例
simulink建模实例Simulink是一种功能强大的工具,用于建立和模拟各种系统的动态行为。
它可以帮助工程师和科学家更好地理解和分析系统的行为,并进行系统设计和优化。
下面我将通过一个实例来展示Simulink的应用。
假设我们要建立一个控制系统,用于控制一个小型机器人的移动。
该机器人有两个驱动轮,我们希望能够通过Simulink来设计一个控制器,使机器人能够按照预定的路径移动。
我们需要建立一个系统模型,包括机器人本身、传感器和执行器。
在Simulink中,我们可以使用各种模块来表示这些组件,并使用连线连接它们。
例如,我们可以使用“转向模块”来表示机器人的转向系统,使用“速度模块”来表示机器人的速度控制系统。
接下来,我们需要定义机器人的运动路径。
在Simulink中,我们可以使用“路径生成器”模块来定义路径。
通过调整路径生成器的参数,我们可以创建各种形状的路径,例如直线、曲线等。
然后,我们需要设计一个控制器,将路径信息转换为机器人的运动指令。
在Simulink中,我们可以使用“控制器模块”来实现这一功能。
该模块可以根据路径信息和机器人的当前位置,计算出机器人应该采取的行动,例如转向角度和速度。
我们需要将控制指令发送给机器人的执行器,以实现机器人的移动。
在Simulink中,我们可以使用“执行器模块”来模拟执行器的行为。
该模块可以将控制指令转换为实际的电压或力矩信号,驱动机器人的驱动轮进行运动。
通过上述步骤,我们就建立了一个完整的机器人控制系统模型。
我们可以在Simulink中进行仿真,观察机器人在不同路径和控制策略下的运动行为。
通过调整模型中各个组件的参数,我们可以进行系统性能的优化和改进。
Simulink是一个强大的工具,可以帮助我们建立和模拟各种系统的动态行为。
通过Simulink,我们可以更好地理解和分析系统的行为,并进行系统设计和优化。
在实际工程中,Simulink的应用广泛,并在控制系统、信号处理等领域发挥着重要作用。
第七章Simulink仿真案例

自动化与电气工程学院 许春磊
第七章 Simulink仿真
• • • • 7.1 Simulink基础 7.2 Simulink模型操作和仿真系统设置 7.3 系统建模实例 7.4 仿真系统中的子系统
• Simulink是MATLAB软件的一个软件包,能 够对动力学系统进行建模、仿真以及各种分 析。Simulink仿真模拟支持完全的图形化界 面。 • Simulink提供了图形用户界面,使得构建模 型变的更直观、简单,只需要鼠标的点击与 拖放。Simulink模块是分层次结构的,为用 户寻找需要的模块提供了方便,提高了工作 效率。所以Simulink是MATLAB软件一个非 常重要的组成部分。
4. Simulink模型窗口
• 模型窗口含有菜单栏、工具栏、编辑框和状态栏等部分
5. Simulink建模仿真示例
• • • • • • 例7.1 用Simulink模拟正弦信号产生与输出。 创建Simulink的步骤: (1) 创建新模型界面 (2) 添加正弦信号产生模块和波形显示模块 (3) 模块属性设置 (4) 运行仿真系统
• 创建Simulink仿真系统模型步骤如下: • (1) 将Sources模块库中Signal Generator模块拖入模型窗口;将 Continuous模块库中State-Space模块拖入模型窗口;将Sinks模块库中 Scope模块拖入模型窗口。 • (2) 连线,设置模块属性。Signal Generator模块,Wave form设置为 square,Amplitude设置为25;State-Space模块,Parameters A设置为 [-1/0.02, -0.3/0.02; 0.3/0.0001, -0.000005/0.0001],B设置为[1/0.02; 0] ,C设置为[0, 1],D设置为0,Initial conditions设置为[1, 10]。结果如图 7.40所示。 • (3) 将上面仿真系统模型保存为EXAMP07006,Stop time设置为2秒。
基于SIMULINK的二阶_三阶系统建模与仿真
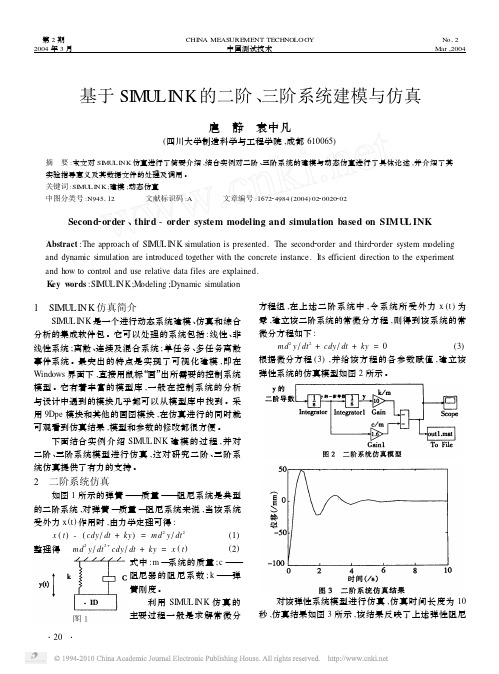
(3)
根据微分方程 (3) ,并给该方程的各参数赋值 ,建立该
弹性系统的仿真模型如图 2 所示 。
对该弹性系统模型进行仿真 ,仿真时间长度为 10 秒 ,仿真结果如图 3 所示 ,该结果反映了上述弹性阻尼
·20 ·
系统在图 2 所示参数条件下质量块位移随时间变化的 情况 。
在输入一定的情况下 ,我们可以通过调节系统参 数得到最佳输出结果 ,通过对系统各参数的调节 ,得出 不同参数条件下仿真结果 ,对这些仿真结果进行比较 , 可以方便的反映在该系统中各参数变化对输出结果影 响的大小 ,从而真实反映该弹性系统的特性 ,方便确定 各参数的重要性 。
在实际实验中 ,我们可以依据仿真结果方便的对 各系统参数进行比较和选取 ,在该弹性系统的仿真过 程中 ,如果系统参数变化小 ,但对输出结果影响大 ,则 该参数的所要求的精度较高 ,反之则该参数的所要求 的精度较底 ,这些对我们实际实验中各系统参数的选 取具有重要的指导意义 。
3 三阶系统仿真
如图 4 所示的直流电力拖动系统是一个典型的三 阶系统 ,首先对该系统进行模型化 ,即建立该系统的数 学模型 ,得到三阶系统的常系数微分方程如下 :
面积 。通过几何方式求得实测线段与设计轮廓的焦点
后 ,可有几何方式求出封闭图形的面积 。同样 ,在设计
断面轮廓较为复杂时 ,要考虑的边界条件非常多 ,面积
计算容易产生错误 。而采用积分方式计算 ,不论断面
轮廓多么复杂 ,均能得到非常准确的结果 。
积分计算方式 :如图 2 所示 ,首先作一虚拟的能包
容设计断面轮廓和实测断面轮廓的最小矩形 ,左下角
我们在需要构造自己的模块时只需要将自己的功 能代码放在适当的位置 ,定义模块的输入输出端口的 数目和类型即可 ,这样便很方便地实现了对该数据文 件的调用 。
simulink仿真简单实例
simulink仿真简单实例
一、模拟环境
1、MATLAB/Simulink 设计环境:
在MATLAB中开发Simulink模型,仿真模拟系统,开发系统塑造都可以在这个环境下进行。
2、LabVIEW 设计环境:
LabVIEW允许你以基于可视化技术的开发环境(VI)来创建测试,模拟,监控系统,以及自动化系统的可视化界面。
二、仿真实例
1、基于MATLAB/Simulink的仿真实例:
(1)传统的PID控制器
这是一个利用PID控制器控制速度的例子。
首先,建立一个简单的Simulink模型,包括PID控制器、电机和反馈器件。
之后,你可以调整PID参数,以提高系统的控制能力。
(2)智能控制
这是一个基于智能控制算法的实例。
通过使用神经网络,试图根据输入自动调整PID参数,使系统具有更强的控制能力。
2、基于LabVIEW的仿真实例:
(1)叉车仿真
这是一个使用LabVIEW来模拟电动叉车运行过程的实例。
你可以模拟叉车的启动过程,叉车行驶过程,并开发出任意的叉车控制算法。
(2)汽车仿真
这是一个使用LabVIEW进行汽车模拟的实例。
你可以模拟汽车的动力性能,并开发出任意类型的汽车控制算法,如路径规划算法,自动驾驶算法等。
Simulink建模仿真实例详解

模型可以分为实体模型和数学模型。 实体模型又称物理效应模型,是根据系统之间的相似性而建 立起来的物理模型,如建筑模型等。 数学模型包括原始系统数学模型和仿真系统数学模型。原始 系统数学模型是对系统的原始数学描述。仿真系统数学模型 是一种适合于在计算机上演算的模型,主要是指根据计算机 的运算特点、仿真方式、计算方法、精度要求将原始系统数 学模型转换为计算机程序。
0.6 0.4 0.2 0 -0.2 -0.4 -0.6 -0.8 -1
0
1
2
3
4
5
6
7
8
9
10
例子2 单自由度系统: 初始条件:
& + cx & + kx = 0 m& x
解析解为:
& ( 0) = x &0 = 0 x(0) = x0 = 1, x
m 要求:采用 Simulink 对系统进行仿真。已知参数:
1.3.3 Simulink 应用举例
(原教材P6例子)
在Matlab命令窗口中输入 dblcart1 右图所示的模型用来 模拟双质量-弹簧系 统在光滑平面上受一 个周期力情况下的运 动状态,其中周期力 只作用在左边的质量 块上。 F(t)
x' = Ax+Bu y = Cx+Du Plant
Demux Actual Position
静态系统模型 动态系统模型 连续系统模型 代数方程 集中参数 微分方程 分布参数 偏微分方程 离散系统模型 差分方程
1.1.2 计算机仿真
1. 仿真的概念 仿真是以相似性原理、控制论、信息技术及相关领域的 有关知识为基础,以计算机和各种专用物理设备为工具,借 助系统模型对真实系统进行试验的一门综合性技术。 2. 仿真分类 ( 1 )实物仿真:又称物理仿真。是指研制某些实体模型, 使之能够重现原系统的各种状态。早期的仿真大多属 于这一类。 优点:直观,形象,至今仍然广泛应用。 缺点:投资巨大、周期长,难于改变参数,灵活性差。
Simulink通信系统建模与仿真实例分析教学设计 (2)
Matlab/Simulink通信系统建模与仿真实例分析教学设计一、教学目标本课程旨在通过【Matlab/Simulink通信系统建模与仿真实例分析】的教学,使学生掌握如下知识和能力:1.了解数字通信系统基本概念及其发展过程;2.掌握数字通信系统的建模方法和仿真技术;3.能够通过实例分析,掌握数字通信系统的性能分析方法;4.能够设计数字通信系统并进行仿真。
二、教学内容1. 数字通信系统概述•数字通信系统基本概念•数字通信系统的应用领域及其发展历程2. 数字通信系统建模方法•数字信号的基本特性•采样、量化和编码的基本原理•数字调制技术•误差控制编码技术3. 数字通信系统的仿真技术•Simulink仿真环境的基本概念和使用方法•通信系统仿真模型设计方法4. 数字通信系统的性能分析方法•常见数字通信系统的性能参数及其定义•数字通信系统的误码率分析方法5. 数字通信系统设计与仿真实例分析•基于Matlab/Simulink的通信系统建模和仿真实例分析三、教学方法本课程采用主题讲授和案例分析相结合的教学模式。
主要教学方法包括:1.讲授:教师通过课堂讲解授予基本概念、原理和技术,并采取案例分析的方法,使学生逐步领悟和掌握学习内容。
2.实验:采用Matlab/Simulink仿真软件进行数字通信系统建模和仿真实验。
3.课堂讨论:设计选题和应用实践案例的课堂讨论。
四、教学评估本课程的教学评估主要通过期末考试、实验报告和作业完成情况来进行。
1. 期末考试期末考试采用闭卷考试形式,主要测试学生对数码通信系统理论的掌握情况,考核内容覆盖课程中所讲述的主要内容。
2. 实验报告实验报告要求学生通过Matlab/Simulink仿真软件对数字通信系统进行建模和仿真,并撰写学习笔记和所完成实验的结果分析。
3. 作业完成情况教师将根据课堂讨论和布置的作业对学生的学习情况进行评估。
五、教学资源教师将为本课程提供以下教学资源:1.选取优秀的课程设计案例,供学生进行仿真和分析;2.为学生提供Matlab/Simulink仿真软件的操作指导和优秀的资源链接。
Simulink建模仿真实例详解

(2)数学仿真:是用数学语言去描述一个系统,并编制程 序在计算机上对实际系统进行研究的过程。
优点:灵活性高,便于改变系统结构和参数,效率高 (可以在很短时间内完成实际系统很长时间的 动态演变过程),重复性好
模型可以分为实体模型和数学模型。
实体模型又称物理效应模型,是根据系统之间的相似性而建 立起来的物理模型,如建筑模型等。
数学模型包括原始系统数学模型和仿真系统数学模型。原始 系统数学模型是对系统的原始数学描述。仿真系统数学模型 是一种适合于在计算机上演算的模型,主要是指根据计算机 的运算特点、仿真方式、计算方法、精度要求将原始系统数 学模型转换为计算机程序。
crta n i m 2
Animation fu n cti o n
Inputs & Sensors1
Double Mass-Spring System
?
(Double click on the "?" for more info)
To start and stop the simulation, use the "Start/Stop" selection in the "Simulation" pull-down menu
0
-0.2
-0.4
-0.6
-0.8
-1
0
1
2
3
4
5
6
7
8
9 10
例子2
单自由度系统:
初始条件:
m&x&+ cx& + kx = 0
试验四-SIMULINK仿真模型建立及仿真
实验四SIMULINK仿真模型的建立及仿真(一)一、实验目的:1、熟悉SIMULINK模型文件的操作。
2、熟悉SIMULINK建模的有关库及示波器的使用。
3、熟悉Simulink仿真模型的建立。
4、掌握用不同的输入、不同的算法、不同的仿真时间的系统仿真。
二、实验内容:1、设计SIMULINK仿真模型。
2、建立SIMULINK结构图仿真模型。
3、了解各模块参数的设定。
4、了解示波器的使用方法。
5、了解参数、算法、仿真时间的设定方法。
例7.1-1已知质量m=1kg,阻尼b=2N.s/m。
弹簧系数k=100N/m,且质量块的初始位移x(0)=0.05m,其初始速度x’(0)=0m/s,要求创建该系统的SIMULINK 模型,并进行仿真运行。
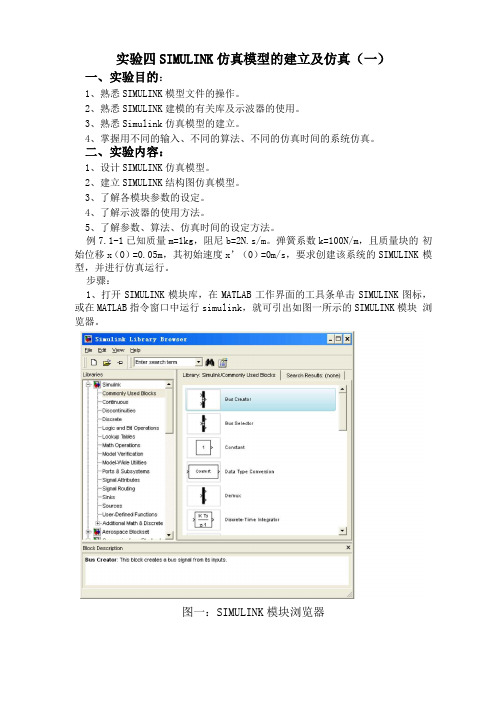
步骤:1、打开SIMULINK模块库,在MATLAB工作界面的工具条单击SIMULINK图标,或在MATLAB指令窗口中运行simulink,就可引出如图一所示的SIMULINK模块浏览器。
图一:SIMULINK模块浏览器2、新建模型窗,单击SIMULINK模块库浏览器工具条山的新建图标,引出如图二所示的空白模型窗。
图二:已经复制进库模块的新建模型窗3、从模块库复制所需模块到新建模型窗,分别在模块子库中找到所需模块,然后拖进空白模型窗中,如图二。
4、新建模型窗中的模型再复制:按住Ctrl键,用鼠标”点亮并拖拉”积分模块到适当位置,便完成了积分模块的再复制。
5、模块间信号线的连接,使光标靠近模块输出口;待光标变为“单线十字叉” 时,按下鼠标左键;移动十字叉,拖出一根“虚连线”;光标与另一个模块输入口靠近到一定程度,单十字变为双十字;放开鼠标左键,“虚连线”变变为带箭头的信号连线。
如图三所示:图三:已构建完成的新模型窗6、根据理论数学模型设置模块参数:①设置增益模块<Gain>参数,双击模型窗重的增益模块<Gain>,引出如图四所示的参数设置窗,把<Gain>增益栏中默认数字改为2,单击[OK]键,完成设置;—CainEl erne IL+_1.71 se gaiiL (7 = K. or mat riz 巴ain (7 = K*u or 7 = u*K).Ma i n Si cruil Ait ri but es | Parameter At t ribu+ es ]G-a i n:p -Mui t iplication: |E1 ement —1.71 ze(K. :t:uJ-Sample time (-1 for iritLeritedj :OK Cancel Help Apply图四:参数已经修改为2的<6@也>增益模块设置窗②参照以上方法把<Gain1>增益模块的增益系数改为100;③修改求和模块输入口的代数符号,双击求和模块,引出如图五所示的参数设置窗,把符号栏中的默认符号(++)修改成所需的代数符号(--),单击[OK]键,完成设置;图五:改变输入口符号的求和模块参数设置窗④对积分模块<Integrator1>的初始状态进行设置:双击积分模块<Integrator1>,引出如图六所示的参数设置窗,把初始条件Initial condition 栏中的默认0初始修改为题目给定的0.05,单击[OK]键,完成设置。
simulink实例(有好多实例)解析

Simulink仿真实例
仿真曲线为
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
假设未伸长时绳索的端部距地面为50m, 为了得到更真实的曲线,将50减去输出位置
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2018年11月1日星期四 基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
kx, x 0 b( x ) 0, x 0
设m为物体的质量,g是重力加速度, a1,a2是空气阻尼系数,系统方程可以 表示为
mg b( x) a1 x a2 x x m x
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
其运动方程式为
M f bx x
拉力作用时间为2s,建构的模型为
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
因有摩擦力存在,箱子最终将会停止前 进。
2018年11月1日星期四 基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2018年11月1日星期四
基于MATLAB/SIMULINK的系统建模与仿真
SIMULINK建模仿真PID控制

实验二PID调节器实验内容:SIMULINK建模仿真学生信息:自动化提交日期:2023年5月28日报告内容:PID调节器一、实验目的1.掌握仿真系统参数设置及子系统封装技术;2.分析PID调节器各参数对系统性能的影响。
二、实验设备1.计算机1台2.MATLAB 7.X软件1套。
三、实验原理说明1.建立新的simulink模块编辑界面,画出如图1所示的模块图。
对应的增益参数分别设为P和I,左击选中全部框图,右击菜单选择“creat subsystem”,变为图2。
图1:图2:2.右击图2中间的框图“Subsystem”,在右击的菜单中选择“Mask Subsystem”,出现下图。
先直接输入disp('PI调节器'),给待封装的子系统命名。
3.选择“Parameters”进行参数设置,点击按钮,添加参数,此参数必须与上文设置的参数对应,否则无效,如下图所示。
4.点击OK,完成子系统的封装。
双击PI调节器模块,出现参数设定对话框如下,可以进行参数调节。
四、实验步骤1.从continue模块集中拉出Derivative、Integrator以及从Math Operations模块集中拉出Gain模块,设计PID调节器,对PID调节器进行封装;2.建立Simulink原理图如下:3.双击PID调节器模块,调整调节器的各参数。
五、实验要求分析调节器各参数对系统性能的影响,撰写实验报告:1.P调节将PID调节器的积分增益和微分增益改为0,使其具有比例调节功能,对系统进行纯比例调节。
调整比例增益(P=0.5,2,5),观察响应曲线的变化。
图1 P=0.5时的阶跃信号及其响应图2 P=2时的阶跃信号及其响应图3 P=5时的阶跃信号及其响应P增大,系统在稳定时的静差减少。
2.PD调节调节器的功能改为比例微分调节,调整参数(P=2,D=0.1,0.5,2,5),观测系统的响应曲线。
图4 P=2,D=0.1时的阶跃信号及其响应图5 P=2,D=0.5时的阶跃信号及其响应图6 P=2,D=2时的阶跃信号及其响应图7 P=2,D=5时的阶跃信号及其响应D增大,系统将会快速收敛,同时系统静差会增大。
lms simulink 实例

lms simulink 实例LMS Simulink是一种功能强大的工具,用于进行系统建模和仿真。
在本文中,我们将通过一个实例来展示Simulink的应用。
请注意,本文将以人类的视角进行写作,以增强阅读体验。
标题:使用LMS Simulink进行电机控制系统建模与仿真简介:电机控制是现代工业中常见的应用之一,它在许多领域中发挥着重要作用。
为了实现电机的精确控制,需要进行系统建模和仿真。
本文将介绍如何使用LMS Simulink来实现电机控制系统的建模和仿真。
1. 建立电机模型我们需要建立电机的数学模型。
在Simulink中,可以使用不同的模块来表示电机的各个组件,如电感、电阻、转子等。
通过将这些模块连接在一起,可以构建出完整的电机模型。
2. 设计控制算法接下来,我们需要设计控制算法,以实现对电机的精确控制。
在Simulink中,可以使用不同的控制模块来实现PID控制、模糊控制等算法。
通过将这些控制模块与电机模型连接在一起,可以实现电机的闭环控制。
3. 仿真与分析完成模型的建立和控制算法的设计后,我们可以进行仿真和分析。
在Simulink中,可以设置仿真参数,如仿真时间、输入信号等。
通过运行仿真,可以获取电机系统在不同条件下的响应,并进行性能评估和优化。
4. 结果与讨论根据仿真结果,我们可以对电机控制系统的性能进行评估和分析。
通过调整控制算法的参数,可以优化系统的响应速度、稳定性等指标。
同时,还可以通过仿真结果来验证模型的准确性和可靠性。
结论:本文介绍了使用LMS Simulink进行电机控制系统建模和仿真的基本步骤。
通过建立电机模型、设计控制算法、进行仿真和分析,可以实现对电机的精确控制。
Simulink提供了丰富的模块和功能,使得系统建模和仿真变得更加简单和高效。
希望本文能够对读者理解和应用Simulink具有一定的帮助。
以上是关于使用LMS Simulink进行电机控制系统建模与仿真的文章创作。
matlab的simulink仿真建模举例

matlab的simulink仿真建模举例Matlab的Simulink仿真建模举例Simulink是Matlab的一个工具包,用于建模、仿真和分析动态系统。
它提供了一个可视化的环境,允许用户通过拖放模块来构建系统模型,并通过连接和配置这些模块来定义模型的行为。
Simulink是一种功能强大的仿真平台,可以用于解决各种不同类型的问题,从控制系统设计到数字信号处理,甚至是嵌入式系统开发。
在本文中,我们将通过一个简单的例子来介绍Simulink的基本概念和工作流程。
我们将使用Simulink来建立一个简单的电机速度控制系统,并进行仿真和分析。
第一步:打开Simulink首先,我们需要打开Matlab并进入Simulink工作环境。
在Matlab命令窗口中输入"simulink",将会打开Simulink的拓扑编辑器界面。
第二步:创建模型在拓扑编辑器界面的左侧,你可以看到各种不同类型的模块。
我们将使用这些模块来构建我们的电机速度控制系统。
首先,我们添加一个连续模块,代表电机本身。
在模块库中选择Continuous中的Transfer Fcn,拖动到编辑器界面中。
接下来,我们添加一个用于控制电机速度的控制器模块。
在模块库中选择Discrete中的Transfer Fcn,拖动到编辑器界面中。
然后,我们需要添加一个用于输入参考速度的信号源模块。
在模块库中选择Sources中的Step,拖动到编辑器界面中。
最后,我们添加一个用于显示模拟结果的作用模块。
在模块库中选择Sinks 中的To Workspace,拖动到编辑器界面中。
第三步:连接模块现在,我们需要将这些模块连接起来以定义模型的行为。
首先,将Step模块的输出端口与Transfer Fcn模块的输入端口相连。
然后,将Transfer Fcn模块的输出端口与Transfer Fcn模块的输入端口相连。
接下来,将Transfer Fcn模块的输出端口与To Workspace模块的输入端口相连。
Simulink仿真举例说明
附录四Simulink仿真举例说明Simulink是MATLAB最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。
Simulink包括连续与离散模块、各种工具模块、信源信宿模块以及通信模块库中各种信源与信道编码等内容。
通过Simulink提供的丰富的功能块,用户可以迅速地创建系统的模型,不需要书写一行代码,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统。
以下用实例来说明Simulink在通信系统设计中建模和仿真应用,使刚开始接触Simulink的读者能够对其有更为形象的了解。
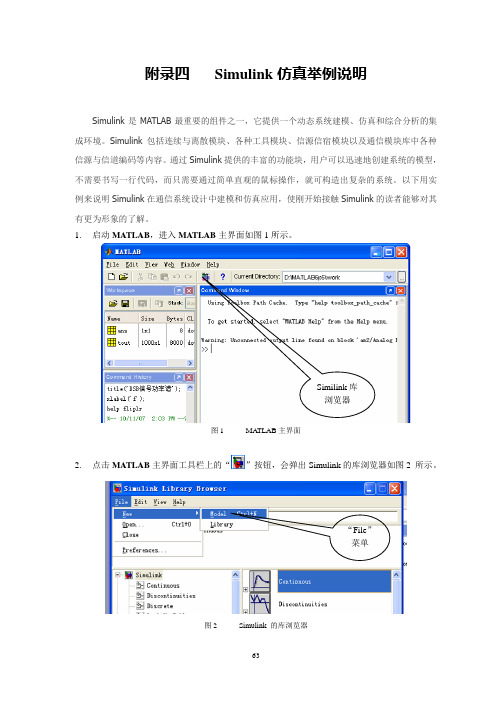
1.启动MATLAB,进入MATLAB主界面如图1所示。
Similink库浏览器图1 MA TLAB主界面2.点击MATLAB 主界面工具栏上的“”按钮,会弹出Simulink的库浏览器如图2 所示。
“File”菜单图2Simulink 的库浏览器3. 在Simulink Browser 的界面下,选择“File ”菜单下“New ”中的“Model ”选项,弹出如图3所示的模型窗口,此时就可以在Simulink Browser 界面中选择不同的模块来建立自己的模型。
图3Simulink 的模型窗口4. Simulink 建模举例说明。
● 建立新模型如图3所示。
● 向模型中添加模块。
在Simulink Browser 窗口中,如图4所示,依次选择 ① Simulink ,② Source 库,③ Signal Generator 模块(信号发生器),然后将其拖到如图3所示的模型窗口中。
3图4 模块的选择方法用同样的方法可添加其它所需的模块,添加完各个模块后,模型窗口如图5所示。
图5 添加了各个模块后的模型窗口本实验中要用到的模块还有:Simulink / Source库下的Constant模块(常数模块);Simulink /Math Operations库下的Product模块(乘法器模块);Simulink / Discrete库下的Zero-Order Hold模块(抽样器模块);Simulink / Sink库下的Scope 模块(示波器模块);DSP Blockset / DSP Sinks库下的Spectrum Scope模块(频谱示波器模块);图6 连接两个模块连接各个模块。
Simulink汽车仿真实例PPT课件
13
作业
完成各个子系统的建模.下节课将这些子系统组 装成一个完整的发动机模型.
14
实战1:一个发动机模型
Simulink 模型:
15
实战1:一个发动机模型
仿真结果分析:
1. 负载减小,发动机转速升高并趋于稳定; 2. 节气门开度增加,发动机转速升高并趋于稳定; 3. 负载增大,发动机转速下降并趋于稳定.
front force
front suspension
Ff
Fr
9.81
Mb Mass
pitch torque theta dottheta z dotz
rear force
rear suspension
1 s z
road height
dottheta h
dotz
40
实战4:半车模型悬架系统
前悬架作用力和扭矩数学模型:
1、对半车模型悬架系统进行建模仿真.
46
dot mao
Pm
p a rt4
Te rmin a to r2
N
dot mao
Pm
mao
p a rt5
Te rmin a to r3
1 s
In te g ra to r
Te rmin a to r
T_load p a rt2
T_eng N
T_load
p a rt7
N
edge180
valve timing
33
实战3:防抱死制动系统ABS
基本模块介绍:
1. 传递函数
Transfer Fcn
Continuous
2. 查找表
Lookup TableLoopup Tables
汽车级Simulink建模与仿真
(车辆工程专业)
内容概览
1. 2. 3. 4. 5. 引例:用 Simulink 对微分方程建模仿真 一个发动机模型 离合器接合/分离模型 防抱死制动系统(ABS) 半车模型悬架系统
2
引例
用 Simulink 对下列微分方程进行建模仿真
x 2 x u (u 为常数)
17
实战1:一个发动机模型
发动机 转速闭 环控制 模型
Desired rpm
speed set point
Throttle setting N
theta
dotmai
dotmai
dotPm
Terminator2 PI controller
Pm mai dotmao Pm
Terminator1 part3
26
实战2:离合器接合/分离模型
基本模块介绍:
Hit Crossing:检测输入从指定方向上到达或通过指定 点(sys_hit.mdl); Goto/From:信号的跳转。注意 Tag 的可见性; Memory:存储模块(sys_memory.mdl);
Combinatorial Logic:组合逻辑模块;
5
6
7
8
9
10
5
dottheta
0
45
-5 0 1 2 3 4 5 time in seconds 6 7 8 9 10
作业
1、对半车模型悬架系统进行建模仿真。
46
9
实战1:一个发动机模型
6. 发动机扭矩:
10
实战1:一个发动机模型
7. 发动机角加速度:
11
实战1:一个发动机模型
simulink实例(有好多实例)讲解学习

真2020年3月16日星期一
Simulink仿真实例
真2020年3月16日星期一
Simulink仿真实例
真2020年3月16日星期一
Simulink仿真实例
真2020年3月16日星期一
Simulink仿真实例
运动方程式为
Mx kx bx 0
构建的模型为
真2020年3月16日星期一
Simulink仿真实例
因有阻尼器存在,故箱子最终会停止运 动。
真2020年3月16日星期一
Simulink仿真实例
例题4,下图所示简单的单摆系统,假 设杆的长度为L,且质量不计,钢球的质量为 m.单摆的运动可以以线性的微分方程式来 近似,但事实上系统的行为是非线性的,而 且存在粘滞阻尼,假设粘滞阻尼系数为 bkg/ms-1.
真2020年3月16日星期一
Simulink仿真实例
单摆系统的运动方程式为
mg sin bL mL
选取b=0.03,g=9.8,L=0.8,m=0.3,所构 建的模型
真2020年3月16日星期一
Simulink仿真实例
真2020年3月16日星期一
Simulink仿真实例
例题5:蹦极跳系统:当你系着弹力 绳从桥上跳下来时,会发生什么?这里, 以蹦极跳作为一个连续系统的例子。
Simulink仿真实例
其运动方程式为
f bx Mx
拉力作用时间为2s,建构的模型为
真2020年3月16日星期一
Simulink仿真实例
因有摩擦力存在,箱子最终将会停止前 进。
Simulink建模仿真基础及实例

第3章 Simulink建模仿真基础
3.2.2
simulink 的使用 1. 点击鼠标左键
2. 点击鼠标左 键‘新建’
3. 双击打开 模块窗口
第3章 Simulink建模仿真基础
取信号源Sources/Step
双击可弹出属性 窗口编辑属性
弹开右边 模块窗口
鼠标选中后拖 拽 到仿真窗口
第3章 Simulink建模仿真基础 取增益Math/Gain
设r = 1, d = 0.5, a = 0.1, b = 0.02, x(0) = 25, y(0) =
2. 求x(t), y(t)和y(x)的图形.
第3章 Simulink建模仿真基础
解法1 先编写m函数shier.m: function xdot=shier(t,x) r=1; d=0.5; a=0.1; b=0.02; xdot=diag([r-a*x(2), -d+b*x(1)])*x;
第3章 Simulink建模仿真基础
3.2 Simulink入门
Simulink是MATLAB提供的实现动态系统
建模和仿真的一个软件包. 它让用户把精力从编
程转向模型的构造.
Simulink一个很大的优点是为用户省去了 许多重复的代码编写工作。
第3章 Simulink建模仿真基础
第3章 Simulink建模仿真基础
第3章 Simulink建模仿真基础
教学内容要点
掌握Simulink模型的建立方法 掌握Simulink模块库
学会S函数的设计和调用
了解自定义模块的模块化与封装
第3章 Simulink建模仿真基础
主要教学内容
1、 2、 3、 4、 5、 6、 概述 Simulink入门 Simulink功能模块 创建Simulink模型 Simulink 仿真运行 Simulink中的S函数
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.3 Simulink 与建模仿真
1.3.1 Simulink
Simulink 是一种用来实现计算机仿真的软件工具。它是 MATLAB 的一个附加组件,可用于实现各种动态系统(包 括连续系统、离散系统和混合系统)的建模、分析和仿真。
c/m
初值设置为0
&x& 1 x& s
积分得到速度
初值设置为1
1x
s
积分得到位移
Scope
1 k/m
1 0.8 0.6 0.4 0.2
0 -0.2 -0.4 -0.6
0
5
10
15
如果系统中没有阻尼,则动力方程为:
m&x&+ kx = 0
已知参数: m = 1, k = 1
初始条件:
x(0) = x0 = 1, x&(0) = x&0 = 0
=
e −ζω 0t
⎡ ⎢ x0 ⎣
cos(ωd t )
+
x&0
+ ζω0 x0 ωd
sin(ωd
t
⎤ )⎥
⎦
其中:
ω0 =
k m
系统固有频率Hale Waihona Puke ωd = ω0 1− ζ 2
ζ= c
2 km
阻尼固有频率 相对阻尼系数
m&x&+ cx& + kx = 0 &x&+ c x& + k x = 0
mm
1
x(0) = x0 = 1, x&(0) = x&0 = 0 已知参数:m = 1, c = 1, k = 1
⎧x&(t) = sin(t) ⎩⎨x(0) = −1
利用初始条件 C = 0
系统的解析解为: x(t) = − cos(t)
Simulink模型:
Sine Wave
在仿真时,需要将积分
模块
1 s
的初始值设置
为-1,最终可以得到
标准的余弦曲线
1 s
Integrator
Scope
1
0.8
0.6
0.4
0.2
解析解为:
x(t)
=
x0
cos(ω0t)
+
x&0
ω0
sin(ω0t)
其中: ω0 =
k m
系统固有频率
m&x&+ kx = 0
已知参数: m = 1, k = 1
&x&+ k x = 0 m
初始条件: x(0) = x0 = 1, x&(0) = x&0 = 0
初值为0
&x& 1 x& s
初值为1
1
步骤一:添加模块
s
Sine Wave
Integrator
Scope
从源模块库(Sources)中复制正弦波模块(Sine Wave)。 连续模块库(Continuous)复制积分模块(Integrator)。 输出显示模块库(Sinks)复制示波器模块(Scope)。
1
步骤二:连接模块
s
Sine Wave
1x
s
积分得到速度
积分得到位移
Scope
-1 -k/m
1 0.8 0.6 0.4 0.2
0 -0.2 -0.4 -0.6 -0.8
-1 0
5
10
15
1.6 模型基本结构
一个典型的 Simulink 模型包括如下三种类型的元素:
信号源模块
源模块
被模拟的系统模块
系统模块
显示模块
输出显示模块
1.2 仿真的三要素
计算机仿真的三个基本要素是系统、模型和计算机,联 系着它们的三项基本活动是模型建立、仿真模型建立(又称 二次建模)和仿真试验。
数学仿真采用数学模型,用数学语言对系统的特性进行描 述,其工作过程是: z 建立系统的数学模型;
z 建立系统仿真模型,即设计算法,并转化为计算机程序,使 系统的数学模型能为计算机所接受并能在计算机上运行;
Integrator
Scope
步骤三:运行仿真
双击示波器模块,打开Scope窗口。双击模 型窗口菜单中的【 Simulation>Start 】,仿 真执行,结果如图所示。
2
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
1
2
3
4
5
6
7
8
9 10
如果将以上算例的初始条件改为: x(0) = −1
SIMULINK (1)
快速入门
本章主要内容和学习目的
首先介绍计算机仿真技术和仿真建模方法的基本概念,以 便对建模和仿真有个初步和整体的认识;然后对 Simulink 进 行简单介绍,并以一个简单例子进行引导;最后介绍 Simulink 的工作原理,为后续的深入掌握 Simulink 打下基础。
z 动态系统的计算机仿真 z 仿真三要素 z Simulink 与建模仿真 z Simulink 的安装 z 创建一个简单模型 z 模型基本结构
To start and stop the simulation, use the "Start/Stop" selection in the "Simulation" pull-down menu
Esti m a te d Po si ti o n
Double click here for
SIMULINK Help
In1
Out1
State esti m ator
x' = Ax+Bu y = Cx+Du
Plant
Demux
Actual Po si ti o n
K
Feedback gain using LQR design.
Out1
In1
State e sti m a to r
In1 OuItn12
Inputs & Sensors
右图所示的模型用来 模拟双质量-弹簧系 统在光滑平面上受一 个周期力情况下的运 动状态,其中周期力 只作用在左边的质量 块上。
F(t)
x' = Ax+Bu y = Cx+Du
Plant
Demux
Actual Po si ti o n
K
Feedback gain using LQR design.
Out1
Simulink 模型元素关联图
¾ 信号源为系统的输入,它包括常数信号源、函数信号发生 器(如正弦波和阶跃函数波等)和用户自己在 MATLAB
中创建的自定义信号。
¾ 系统模块作为中心模块是 Simulink 仿真建模所要解决的 主要部分。
¾ 系统的输出由显示模块接收。输出显示的形式包括图形显 示、示波器显示和输出到文件或 MATLAB 工作空间中三 种。输出模块主要在 Sinks 库中。
模型可以分为实体模型和数学模型。
实体模型又称物理效应模型,是根据系统之间的相似性而建 立起来的物理模型,如建筑模型等。
数学模型包括原始系统数学模型和仿真系统数学模型。原始 系统数学模型是对系统的原始数学描述。仿真系统数学模型 是一种适合于在计算机上演算的模型,主要是指根据计算机 的运算特点、仿真方式、计算方法、精度要求将原始系统数 学模型转换为计算机程序。
使之能够重现原系统的各种状态。早期的仿真大多属 于这一类。 优点:直观,形象,至今仍然广泛应用。 缺点:投资巨大、周期长,难于改变参数,灵活性差。
(2)数学仿真:是用数学语言去描述一个系统,并编制程 序在计算机上对实际系统进行研究的过程。
优点:灵活性高,便于改变系统结构和参数,效率高 (可以在很短时间内完成实际系统很长时间的 动态演变过程),重复性好
Esti m a te d Po si ti o n
Double click here for
SIMULINK Help
运行菜单选项【Simulation>Start】,则屏幕上出现双质量- 弹簧系统运动状态的动画图形。
模型中的Actural Position模块和Estimated Position模块用来 显示在一个周期内的左边质量块的位置轨迹。
此模型中使用了状态 判断和LQR控制。
模型中还有几个“隐藏了真实身份”的子系统,如图中的 Inputs&Sensors 模块和 State estimator 模块。 双击后可看到 它们的“真实面目”。
1
In1
Mux
1
2
In2
Inputs & Out1
Sensors
1
x' = Ax+Bu
1
y = Cx+Du
1.1 动态系统的计算机仿真
1.1.1 系统与模型
1. 系统
系统只指具有某些特定功能、相互联系、相互作用的 元素的集合。这里的系统是指广义上的系统,泛指自然界 的一切现象与过程,例如工程系统如控制系统、通讯系统 等,非工程系统如股市系统、交通系统、生物系统等。
2. 系统模型
系统模型是对实际系统的一种抽象,是对系统本质(或 是系统的某种特性)的一种描述。模型具有与系统相似的特 性。好的模型能够反映实际系统的主要特征和运动规律。
1.4 Simulink 的安装
系统要求: 奔腾100以上CPU,16MB以上内存,Windows 9x或Windows NT