APM Pixhawk飞行模式
PIXHAWK飞控概览
PIXHAWK飞控概览Pixhawk飞控的技术规格、接口分配、PWM,PPM-SUM和SBUS模式下的舵机与电调的连接方法、接口图,和与其他常见飞控的区别与选择。
技术规格•处理器32位 STM32F427 ARM Cortex M4 核心外加 FPU(浮点运算单元)168 Mhz/256 KB RAM/2 MB 闪存32位 STM32F103 故障保护协处理器•传感器Invensense MPU6000 三轴加速度计/陀螺仪ST Micro L3GD20 16位陀螺仪ST Micro LSM303D 14位加速度计/磁力计MS5611 MEAS 气压计•电源良好的二极管控制器,带有自动故障切换舵机端口7V高压与高电流输出所有的外围设备输出都有过流保护,所有的输入都有防静电保护•接口5个UART串口,1个支持大功率,两个有硬件流量控制Spektrum DSM/DSM2/DSM-X 卫星输入Futaba SBUS输入(输出正在完善中)PPM sum 信号RSSI(PWM或者电压)输入I2C, SPI, 2个CAN, USB3.3 与 6.6 ADC 输入•尺寸重量 38g宽 50 mm高 15.5 mm长 81.5 mmPixhawk 的接口分配PWM,PPM-SUM和SBUS模式下的舵机与电调的连接方法Pixhawk 接口图上图中针脚1在右边串口 1 (Telem 1),串口 2 (Telem 2) ,串口 (GPS) 针脚: 6 = GND, 5 = RTS, 4 = CTS, 3 = RX, 2 = TX, 1 = 5V.选择哪款飞控? APM 、PX4,还是 PIXHAWK•APM2.5与2.6是传统ardupilot飞控的最新(也是最终)版本:APM25 与 26 概览•PX4FMU与PX4IO 是这个新飞控家族的最初两个版本:Px4FMU 概览与 Px4IO 概览•Pixhawk是根据我们的需要,结合PX4FMU / PX4IO改进而开发出的PX4飞控的单块电路板版本。
Pixhawk学习指南

APM 2.6 飞控器
APM 2.6 is available for $159 from the 3D Robotics Store without GPS or select the option to include the recommended uBlox GPS with compass for $240.
3、飞控器(带 GPS) Autopilot,自动驾驶仪,这里翻译为飞控器。 自主飞行的能力大小取决于所选的飞控器。APM 和 PX4 是不错的选择。 APM 飞控器,兼容 Arduino 平台,非常稳定,已被世界各地成千上万人使用。 PX4 是一个新的功能强大的飞控器,与 APM 不相上下,其特点是内存大,尽管不兼容 Arduino,不过未来它将会扩展更多的功能。 配套的 GPS 模块有:Mediatek GPS 和 uBlox GPS 。
Pixhawk 飞控器(推荐) 具备改进的干扰控制
Pixhawk is available for $199 from the 3D Robotics Store with GPS sold separately. The remote
mounted 3DR GPS / compass module provides improved interference control. Pixhawk is the newest and most powerful autopilot and it has been specifically optimized for our use. It is highly recommended for all new applications.
1.6. Arducopter 3.1 固件
如果你现在手里已经有了 Pixhawk 飞控器, 那么你就需要往里面下程序。 一般购买回来, 程序已经在里面了,不过如果你更新你的程序,那么你就要下载 Arducopter 固件。 固件:也就是飞控程序。 更新的版本,参考官方链接。 详细参考:
APM飞行模式的参数
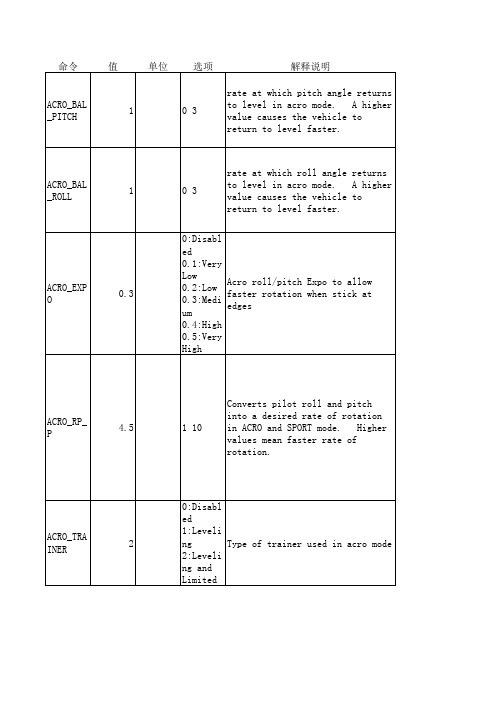
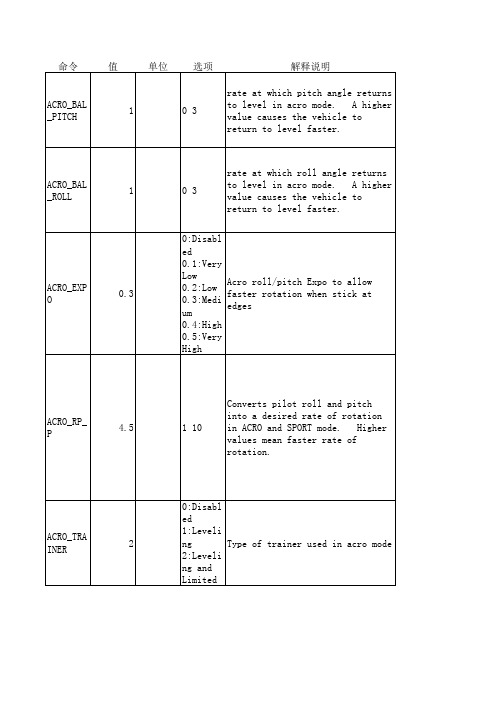
ACRO_RP_ P
4.5
1 10
Converts pilot roll and pitch into a desired rate of rotation in ACRO and SPORT mode. Higher values mean faster rate of rotation.
ACRO_TRA INER
Maximum acceleration in roll/pitch axis
Maximum acceleration in yaw axis
Controls whether body-frame rate feedfoward is enabled or disabled maximum rotation rate in roll/pitch axis requested by angle controller used in stabilize, loiter, rtl, auto flight modes maximum rotation rate in roll/pitch axis requested by angle controller used in stabilize, loiter, rtl, auto flight modes
1
0 3
rate at which roll angle returns to level in acro mode. A higher value causes the vehicle to return to level faster.
ACRO_EXP O
0.3
0:Disabl ed 0.1:Very Low Acro roll/pitch Expo to allow 0.2:Low faster rotation when stick at 0.3:Medi edges um 0.4:High 0.5:Very High
Pixhawk无人机教程(云豹无人机) Roll速率和Pitch速率的P的调试

Pixhawk无人机教程 Roll速率和Pitch速率的P的调试配置参数是比较危险的,有问题或者不懂得可以咨询我们云豹无人机Roll速率和Pitch速率的P的调试∙虽然有很多的增益可对APM:Copter进行调整,要想获得最佳的飞行性能,最关键的是Roll速率和Pitch速率的P值,这个参数将期望的旋转速率转为电机输出。
∙这一项就能让在飞行器更好飞,起码在稳定模式能不错。
关于如何调整这个参数的一些基本建议:1.调节过高的话飞行器将在Roll/Pitch快速振荡2.太低的话飞行器将变得反应迟钝3.大功率多轴应使用较低的增益,小功率多轴要用更高的增益飞行中调整Roll速率P和Pitch速率P是可以在飞行中调整的,用你的发射机通道6的旋钮,跟随下列步骤调整:1.把你的APM/Pixhawk/PX4连接至Mission Planner2.在Mission Planner中,选择配置/调试>> APM:Copter Pids3.设置通道6选项为“Rate Roll/Pitch kP”4.设定最小值为0.08,最大为0.20(多数飞行器理想的增益都在这个范围,尽管一小部分飞行器最大可至0.25)5.点击“写入参数”按钮6.将你的发射机通道6旋钮调至最低位,点击“刷新参数”按钮,然后确定下Roll速率P和Pitch速率P 的值变为0.08(或者非常接近)7.将通道6旋钮调至最高位,点击“刷新参数”然后确认Roll速率P变为0.208.往回调通道6旋钮至中间位置9.在自稳模式解锁并飞行你的飞行器,调整通道6旋钮,直到你感觉飞行器很灵活,而且不会抖动10.飞行结束后,断开锂电池连接然后重新连接APM至Mission Planner11.通道6保持飞出最佳性能的位置,返回ArduCopter Pids界面,点击“刷新参数”按钮12.在Roll速率P和Pitch速率P文本框中重新输入你看到的值,但是要有一小点修改,这样Mission Planner才能识别出它有变化并重发送给APM/PX4(注意:如果你重新输入的就是显示在Roll速率P中的数字,它就不会更新)。
APM Flight Modes 飞行模式介绍(超详细)

APM Flight Modes 飞行模式介绍概述多旋翼(直升机)一共有14 个内置的飞行模式,10个的常用的。
飞行模式可以通过遥控器控制,也可以通过GCS地面站进行发送命令更改遥控器和地面站都可以同时控制飞行模式,通常以最后一个命令为准推荐使用的飞行模式一般来讲,当第一次使用APM:Copter的时候,你应该依次使用下列飞行模式获得提高,要保证熟练了再进行下一个。
点击下方任意飞行模式可获得更多信息。
•Stabilize (增稳模式)•Alt Hold (定高模式、高度保持模式)•Loiter (悬停模式)•RTL (Return-to-Launch) (回家模式:返回起飞点)•Auto (自动模式:自动航点飞行,需要依靠GPS)其他飞行模式:•Acro 特技模式(没有飞控辅助增稳的模式)•AutoTune 自动微调(当飞机往一个严重偏的时候,可以执行自动微调)•Brake 刹车锁定模式(将飞机锁定在一个位置,而不受遥控器摇杆影响)•Circle 绕圈模式(绕着兴趣点画圈)•Drift 漂移模式•Guided 引导模式Guided_NoGPS 引导模式-不需要GPS•Land 降落模式•PosHold 定点模式•Sport 运动模块•Throw 抛飞模式(把无人机抛在空中,自动起飞稳定)•Follow Me 跟随模式(无人机跟着你飞行,但是需要GPS和手机地面站配合)•Simple and Super Simple (简单和超级简单模式)•Avoid_ADSB (基于ADSB的避让载人飞机模式。
需要外界ADSB模块)•大多数遥控器只有一个三段开关,所以只能设置三种模式。
如果需要设置6种模式,可以进行开关混控需要依赖GPS的飞行模式:有些飞行模式需要依赖GPS才能飞行,你可以通过状态灯或者地面站获知GPS 是否已经锁定。
以下飞行模式需要GPS锁定才能解锁飞行:•Loiter 悬停模式•RTL (Return-to-Launch) 回家模式•Auto 自动模式•Guided 引导模式•Drift 漂移模式•PosHold 定点模式•Follow Me 跟随模式•Circle 绕圈模式•Throw 抛飞模式不需要依赖GPS锁定的飞行模式:•Stabilize 自稳模式•Alt Hold 定高模式•Acro 特技模式•Sport 运动模式•Land 降落模式全部模式列表:(点击对应的模式查看详解)•Acro Mode•Altitude Hold Mode•Auto Mode•Brake Mode•Circle Mode•Drift Mode•Follow Me Mode (GSC Enabled)•Guided Mode•Land Mode•Loiter Mode•PosHold Mode•Position Mode•RTL Mode•Simple and Super Simple Modes•Sport Mode•Stabilize Mode•Throw ModeStabilize增稳模式概述:•飞手用roll与pitch操作控制飞行器的倾斜角度。
无人机APM-PIXHAWK飞控应用研究

技术与应用APPLICATION编辑 陈姝宇文 / 张祖航 曹著明 薛翼飞无人机APM-PIXHAWK 飞控应用研究摘 要:对于复杂的无人机结构和原理,四旋翼无人机具有成本低、结构简单、使用方便等优势,同时也是最先进入民品市场的机型。
可是,该无人机对飞行控制操作能力要求很高,由此激发了大量科研人士对基于MEMS传感器的开源飞控的研制。
由于无人机飞控的发展,有效提升了多旋翼无人机、固定翼无人机、车模和直升机等设备的性能,使其具备多种运行模式,其功能已接近商业自动驾驶仪标准。
本文通过研究APM-PIXHAWK开源飞控的性能以及原理和相应的飞控调试中的出现问题,提出相关提升其性能的策略,以实现开源飞控在商业市场上的高性能及飞行器的飞行稳定性,更好地为无人机行业做出贡献。
关键词:无人机 飞控 开源 APM 研究从无人机的硬件设施来分析,飞控系统主要包括传感器、飞控计算机及伺服装置三部分。
整个无人机机载飞控系统的核心设备是飞控计算机,其主要功能是依据输入的相关信息(传感器等)、储存的相关数据和状态以及传输的数据与上行遥控指令(无线电测控终端),再完成分析、计算和处理,然后输出给伺服运行机构即舵机系统,来操纵控制无人机的舵面、前轮和发动机的风门,以实现对无人机的飞行或地面滑跑的控制。
无人机相关的状态信息主要由测定装置负责测量,无人机的主要测量装置有:陀螺仪(三轴角速度、垂直),传感器(攻角和偏航角、真实空速、磁航向、气压高度和高度差、发动机转速)等。
以舵机为执行元件的是伺服系统,其随动系统由若干部件组成,它将主要影响飞控系统带宽。
伺服系统是按照指令模型装置或敏感元件输出的电信号来操纵舵面,以实现无人机的自动稳定和控制。
在该伺服系统中常用的三种反馈是均衡反馈、位置反馈和速度反馈。
同时它们构成三种常见的舵回路形式,即硬反馈式、弹性反馈和软反馈式。
一、PIXHAWK 飞控ArduPilot Mega 自动驾驶仪(简称APM 自驾仪-APM V)是一款非常优秀而且完全开源的自动驾驶控制器,可应用于多旋翼、固定翼、车模、直升机等,同时还可以搭配多款功能强大的地面控制站配合使用。
APM飞行模式解说
APM飞行模式注解ELEV是俯仰或升降 1通道对 PitchAILE是横滚或副翼 2通道对 RollTHRO是油门 3通道对 ThrottlRUDD是方向 4通道对 Yaw红正黑负白信号,红正棕负橙信号Pitch 俯仰 Roll 横滚 Throttl 油门 Yaw 方向1、稳定模式Stabilize稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式。
此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最佳模式。
一定要确保遥控器上的开关能很方便无误地拨到该模式,应急时会非常重要。
2、比率控制模式Acro这个是非稳定模式,这时apm将完全依托遥控器遥控的控制,新手慎用。
3、定高模式ALT_HOLD定高模式(Alt Hold)是使用自动油门,试图保持目前的高度的稳定模式。
定高模式时高度仍然可以通过提高或降低油门控制,但中间会有一个油门死区,油门动作幅度超过这个死区时,飞行器才会响应你的升降动作当进入任何带有自动高度控制的模式,你目前的油门将被用来作为调整油门保持高度的基准。
在进入高度保持前确保你在悬停在一个稳定的高度。
飞行器将随着时间补偿不良的数值。
只要它不会下跌过快,就不会有什么问题。
离开高度保持模式时请务必小心,油门位置将成为新的油门,如果不是在飞行器的中性悬停位置,将会导致飞行器迅速下降或上升。
在这种模式下你不能降落及关闭马达,因为现在是油门摇杆控制高度,而非马达。
请切换到稳定模式,才可以降落和关闭马达。
4、自动模式 AUTO自动模式下,飞行器将按照预先设置的任务规划控制它的飞行由于任务规划依赖GPS的定位信息,所以在解锁起飞前,必须确保GPS已经完成定位(APM 板上蓝色LED常亮)切换到自动模式有两种情况:如果使用自动模式从地面起飞,飞行器有一个安全机制防止你误拨到自动模式时误启动发生危险,所以需要先手动解锁并手动推油门起飞。
起飞后飞行器会参考你最近一次ALT Hold 定高的油门值作为油门基准,当爬升到任务规划的第一个目标高度后,开始执行任务规划飞向目标;如果是空中切换到自动模式,飞行器首先会爬升到第一目标的高度然后开始执行任务6、悬停模式Loiter悬停模式是GPS定点+气压定高模式。
10Pixhawk学习笔记

10Pixhawk学习笔记PXI Hawk飞控笔记第九章:APM的飞行模式——sw笨笨编写1.飞行模式列表飞行模式(Flight mode),我个人认为就是用来定义操作者与飞行器之间的关系。
每种飞控都提供了许多飞行模式,了解飞行模式可以简化我们的操作,提高任务成功率,降低摔机次数。
注:1)以上列表为方便应用,根据经验理解后编写,并非来自官方资料。
2)中文名称为个人根据经验翻译,不一定准确或符合一贯用法。
2.APM的常用飞行模式详解下面把飞行中常用到的几个飞行模式详细解释一下,本章内容针对APM for PIX进行讲解APM的相关飞行模式,原始资料来自APM 网站,根据个人经验进行翻译整理,如果内容有误请以英文资料为准。
1)Altitude Hold,定高模式A.模式简介:当切换到此模式的时候,飞行器自动保持当前飞行高度,俯仰、横滚和航向则由遥控器控制。
这个模式是很多其他飞行模式的组成部分,非常重要。
B.注意事项:飞控使用气压传感器来控制高度,如果因为天气变化导致气压传感器输出发生变化,飞行器的高度会随之改变。
如果飞行器安装并启动了超声波传感器,当飞行高度降低于26英尺(大约79米)则使用该传感器进行高度控制。
2)Auto mode,自主飞行A.模式简介当切换到此模式,飞行器会按照预先设定的飞行方式和飞行航点自主导航完成整个飞行过程,其中包含自主起飞、航点任务和自主降落。
航点设置可在地面站软件中完成,并需要上传至飞控。
此模式的飞行控制基于Altitude Hold定高模式和Loiter mode巡游模式,所以在使用自主飞行模式之前需要先完成定高模式和巡游模式的调试和飞行。
自主飞行模式图解B.启动该模式如果飞行器从地面进入此模式,飞控需要确认油门为零。
此时切换至Auto mode,上推油门则自主飞行开始,首先进入自主起飞。
如果在飞行中切换进入此模式,则飞行器按照任务规划从第一个任务开始执行。
C.飞行中得操作自主飞行过程中可随时遥控切换进入其他模式,但是再次从其他模式切换回自主飞行后,仍然会从任务规划的第一个任务开始重新执行。
Pixhawk飞控设置飞行模式教程及LED灯意义
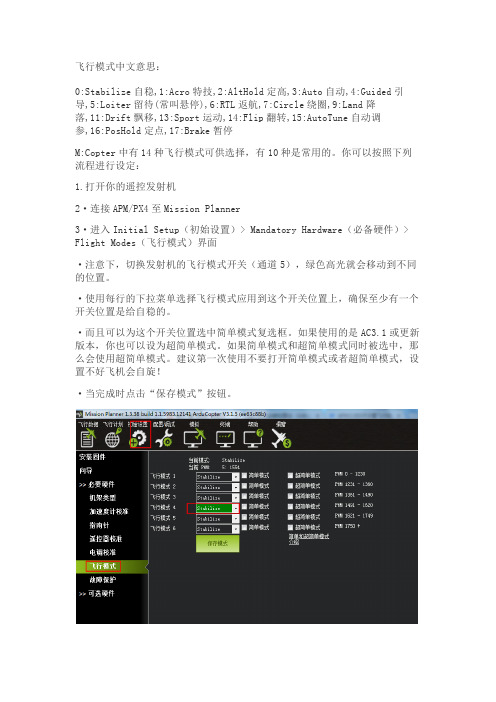
飞行模式中文意思:0:Stabilize自稳,1:Acro特技,2:AltHold定高,3:Auto自动,4:Guided引导,5:Loiter留待(常叫悬停),6:RTL返航,7:Circle绕圈,9:Land降落,11:Drift飘移,13:Sport运动,14:Flip翻转,15:AutoTune自动调参,16:PosHold定点,17:Brake暂停M:Copter中有14种飞行模式可供选择,有10种是常用的。
你可以按照下列流程进行设定:1.打开你的遥控发射机2·连接APM/PX4至Mission Planner3·进入Initial Setup(初始设置)> Mandatory Hardware(必备硬件)> Flight Modes(飞行模式)界面·注意下,切换发射机的飞行模式开关(通道5),绿色高光就会移动到不同的位置。
·使用每行的下拉菜单选择飞行模式应用到这个开关位置上,确保至少有一个开关位置是给自稳的。
·而且可以为这个开关位置选中简单模式复选框。
如果使用的是AC3.1或更新版本,你也可以设为超简单模式。
如果简单模式和超简单模式同时被选中,那么会使用超简单模式。
建议第一次使用不要打开简单模式或者超简单模式,设置不好飞机会自旋!·当完成时点击“保存模式”按钮。
飞行模式注解1、稳定模式Stabilize稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式。
此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最佳模式。
一定要确保遥控器上的开关能很方便无误地拨到该模式,应急时会非常重要。
2、比率控制模式Acro这个是非稳定模式,这时apm将完全依托遥控器遥控的控制,新手慎用。
3、定高模式ALT_HOLD定高模式(AltHold)是使用自动油门,试图保持目前的高度的稳定模式。
航点模式

WN 航 P A 点 _ V 库
I N — N A V
惯 性 导 航
G气 P 压 S 计 、、 罗声 盘呐 、、
等 传 感 器
A 航 H 姿 R 库 S
H A L
自动飞行——对于飞控程序
地面站
目标位置: 高度:H* 经度:Lat* 纬度:lon* 当前位置: 高度:H 经度:Lat 纬度:lon
二维方位角:
气压计 GPS
Δα Δβ
高度差: ΔH
爬升速率: x cm/s 偏航角速度: w degree/s
位置控制器
目标姿态角: 俯仰角 θ 滚转角 Φ 偏航角 Ψ
姿态控制器
输出: 各电机、舵机 pwm波脉宽值
编辑器方法
• APM直接使用 ARDUINO_IDE 编辑 • PIXHAWK则需 要使用MAKE命 令编辑,需要大 量依赖包, NUTX系统, FIRMWARE。
谢谢
函数关系
update_ flight_ mode AUTO_ RUN (auto 模式) 基 础 类 库 update_ flight_ mode ofloiter (GUID E模式)
LOOP
FAST _LOOP
LOOP
FAST _LOOP
函数依赖库函数
M I 任 O S 务 N 库 S I M 无 A 线 N V 通 K 信 L 库 I C O 命 N M 令 D 库 M A
AUTO模式
• 自动模式下,飞行器将按照预先设置的任务规划控制它的 飞行 由于任务规划依赖GPS的定位信息,所以在解锁起 飞前,必须确保GPS已经完成定位 • 切换到自动模式有两种情况: 如果使用自动模式从地面 起飞,飞行器有一个安全机制防止你误拨到自动模式时误 启动发生危险,所以需要先手动解锁并手动推油门起飞。 起飞后飞行器会参考 • 你最近一次定高的油门值作为油门基准,当爬升到任务规 划的第一个 • 目标高度后,开始执行任务规划飞向目标; 如果是空中 切换到自动模式,飞行器首先会爬升到第一目标的高度然 后开始执行任务 • 没有模式选项,直接在悬停模式下等命令
PIXHAWK飞行模式简易说明

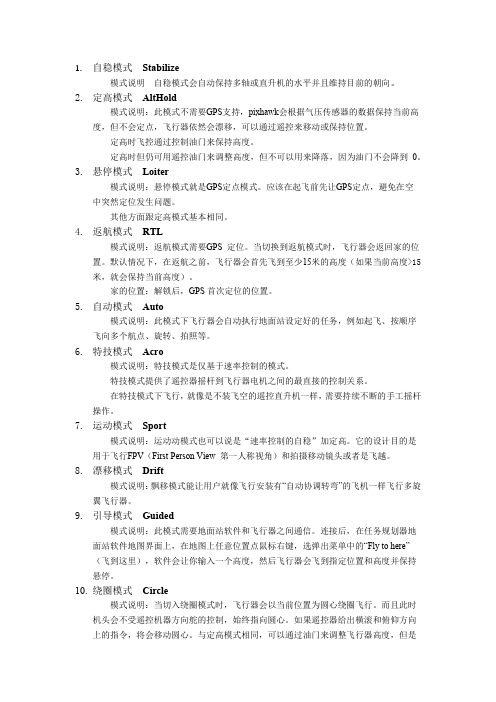
1.自稳模式Stabilize模式说明 自稳模式会自动保持多轴或直升机的水平并且维持目前的朝向。
2.定高模式AltHold模式说明:此模式不需要GPS支持,pixhawk会根据气压传感器的数据保持当前高度,但不会定点,飞行器依然会漂移,可以通过遥控来移动或保持位置。
定高时飞控通过控制油门来保持高度。
定高时但仍可用遥控油门来调整高度,但不可以用来降落,因为油门不会降到0。
3.悬停模式Loiter模式说明:悬停模式就是GPS定点模式。
应该在起飞前先让GPS定点,避免在空中突然定位发生问题。
其他方面跟定高模式基本相同。
4.返航模式RTL模式说明:返航模式需要GPS 定位。
当切换到返航模式时,飞行器会返回家的位置。
默认情况下,在返航之前,飞行器会首先飞到至少15米的高度(如果当前高度>15 米,就会保持当前高度)。
家的位置:解锁后,GPS首次定位的位置。
5.自动模式Auto模式说明:此模式下飞行器会自动执行地面站设定好的任务,例如起飞、按顺序飞向多个航点、旋转、拍照等。
6.特技模式Acro模式说明:特技模式是仅基于速率控制的模式。
特技模式提供了遥控器摇杆到飞行器电机之间的最直接的控制关系。
在特技模式下飞行,就像是不装飞空的遥控直升机一样,需要持续不断的手工摇杆操作。
7.运动模式Sport模式说明:运动动模式也可以说是“速率控制的自稳”加定高。
它的设计目的是用于飞行FPV(First Person View 第一人称视角)和拍摄移动镜头或者是飞越。
8.漂移模式Drift模式说明:飘移模式能让用户就像飞行安装有“自动协调转弯”的飞机一样飞行多旋翼飞行器。
9.引导模式Guided模式说明:此模式需要地面站软件和飞行器之间通信。
连接后,在任务规划器地面站软件地图界面上,在地图上任意位置点鼠标右键,选弹出菜单中的“Fly to here”(飞到这里),软件会让你输入一个高度,然后飞行器会飞到指定位置和高度并保持悬停。
Pixhawk飞控设置飞行模式教程及LED灯意义

飞行模式中文意思:0:Stabilize 自稳,1:Acro 特技,2:AltHold 定高,3:Auto 自动,4:Guided 引导,5:Loiter 留待(常叫悬停),6:RTL 返航,7:Circle 绕圈,9:Land 降落,11:Drift 飘移,13:Sport 运动,14:Flip 翻转,15:AutoTune 自动调参,16:PosHold 定点,17:Brake 暂停M:Copter 中有14 种飞行模式可供选择,有10种是常用的。
你可以按照下列流程进行设定:1. 打开你的遥控发射机2·连接APM/PX4至Mission Planner3·进入Initial Setup (初始设置)> Mandatory Hardware (必备硬件)>Flight Modes (飞行模式)界面·注意下,切换发射机的飞行模式开关(通道5),绿色高光就会移动到不同的位置。
·使用每行的下拉菜单选择飞行模式应用到这个开关位置上,确保至少有一个开关位置是给自稳的。
·而且可以为这个开关位置选中简单模式复选框。
如果使用的是AC3.1 或更新版本,你也可以设为超简单模式。
如果简单模式和超简单模式同时被选中,那么会使用超简单模式。
建议第一次使用不要打开简单模式或者超简单模式,设置不好飞机会自旋!·当完成时点击“保存模式”按钮。
飞行模式注解1、稳定模式Stabilize 稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式。
此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最佳模式。
一定要确保遥控器上的开关能很方便无误地拨到该模式,应急时会非常重要。
2、比率控制模式Acro这个是非稳定模式, 这时apm将完全依托遥控器遥控的控制,新手慎用。
3、定高模式ALT_HOLD定高模式(AltHold) 是使用自动油门,试图保持目前的高度的稳定模式。
APMPixhawk飞行模式
特技模式 Acro Mode特技模式∙特技模式是仅基于速率控制的模式。
∙特技模式提供了遥控器摇杆到飞行器电机之间的最直接的控制关系。
∙在特技模式下飞行,就像是不装飞控的遥控直升机一样,需要持续不断的手工摇杆操作。
细节特技模式有两种类型:默认的模式是基于地面坐标系的比率控制(AXIS_ENABLE = 1)。
第二是基于飞行器本体三个轴的转速比率控制(AXIS_ENABLE = 0)。
由于自我平衡能力不好,不建议用这种高难度模式飞行。
∙特技模式下飞行器的滚转、俯仰、偏航三个轴的角速率由摇杆偏移角度来控制。
∙摇杆居中意味着保持当前角度的姿态。
缺省模式也可以设置成为在摇杆居中的时候把飞行器控制到水平姿态。
∙纵倾和侧倾的控制杆会使飞行器在相应的方向产生相应的倾斜角。
∙为了使飞行器重新恢复水平,各轴摇杆需要向相反方向推。
∙为了维持飞行水平,各轴控制摇杆需要不停地调整。
∙缺省模式有两个参数。
以百分比的形式表示,各自乘以当前的滚转角和俯仰角,然后得到回到水平位置所需要的角速度。
∙偏航控制杆的操纵方式,同稳定状态下的操纵方式相同。
∙油门杆也是直接按照杆量加速或者减速控制控制四个电机。
∙油门也需要不停地修正以维持飞行高度。
调试:∙AXIS_ENABLE = 1 时的控制器基本上是转速比率控制稳定模式,有一些有用的功能。
有两个参数控制∙ACRO_BAL_ROLL配置:∙Beginner 200∙Intermediate 100∙Expert 0.∙ACRO_BAL_PITCH配置:∙Beginner 200∙Intermediate 0∙Expert 0.∙参数ACRO_P:映射控制杆到所需的速度旋转。
∙例如:ACRO_P等于4 就每秒转180°即4乘45°等于180°(4是最大值)。
∙降低ACRO_P值,旋转速度变慢。
∙稳定速率控制PID是∙PID用在稳定模式作为主要角度控制参数。
∙Rate_P是用于控制飞机振动程度。
APM飞行模式的参数
ATC_ACCE L_RP_MAX
ATC_ACCE L_Y_MAX
ATC_RATE _FF_ENAB
0 1800000: Disabled Centi72000:Sl 0 Degrees/ ow Sec/Sec 108000:M edium 162000:F ast 0 720000:D isabled Centi18000:Sl 0 Degrees/ ow Sec/Sec 36000:Me dium 54000:Fa st 0:Disabl ed 0 1:Enable d Centi9000 18000 Degrees/ 36000 Sec
1
Converts pilot yaw input into a desired rate of rotation in ACRO, 1 10 Stabilize and SPORT modes. Higher values mean faster rate of rotation. This controls the time constant for the cross-over frequency used to fuse AHRS (airspeed and heading) and GPS data to estimate 0.001 ground velocity. Time constant is 0.5 0.1/beta. A larger time constant will use GPS data less and a small time constant will use air data less. This controls how how much to use the GPS to correct the attitude. This should never be set to zero 0.0 1.0 for a plane as it would result in the plane losing control in turns. For a plane please use the default value of 1.0. Minimum number of satellites visible to use GPS for velocity based corrections attitude correction. This defaults to 6, 0 10 which is about the point at which the velocity numbers from a GPS become too unreliable for accurate correction of the accelerometers. This controls whether to use dead-reckoning or GPS based 0:Disabl navigation. If set to 0 then the ed GPS won't be used for navigation, 1:Enable and only dead reckoning will be d used. A value of zero should never be used for normal flight.
APM飞行模式的参数
AHRS_YAW _P ANGLE_MA X
0.1
0.1 0.4
This controls the weight the compass or GPS has on the heading. A higher value means the heading will track the yaw source (GPS or compass) more rapidly. 在所有的飞行模式的最大倾斜角度
BAROGLTC H_ACCEL
1500 cm/s/s
100 2000
Baro glitch protection's max vehicle acceleration assumption
BAROGLTC H_DIST BAROGLTC H_ENABLE BATT_AMP _OFFSET
BATT_AMP _PERVOLT
ACRO_BAL _PITCH
1
0 3
ACRO_BAL _ROLL
1
0 3
rate at which roll angle returns to level in acro mode. A higher value causes the vehicle to return to level faster.
rateyawff控制哪些参数通常pid收益正在调整与发射器的频道6旋钮tunehigh032767通道6旋钮的参数的最大值将被应用到当前被调整的发射器上tunelow通道6旋钮的参数的最小值将被应用到当前被调整的发射器上wpyawbehavior0
命令
值
单位
选项
解释说明 rate at which pitch angle returns to level in acro mode. A higher value causes the vehicle to return to level faster.
PIXHAWK飞行模式简易说明

1.自稳模式Stabilize模式说明 自稳模式会自动保持多轴或直升机的水平并且维持目前的朝向。
2.定高模式AltHold模式说明:此模式不需要GPS支持,pixhawk会根据气压传感器的数据保持当前高度,但不会定点,飞行器依然会漂移,可以通过遥控来移动或保持位置。
定高时飞控通过控制油门来保持高度。
定高时但仍可用遥控油门来调整高度,但不可以用来降落,因为油门不会降到0。
3.悬停模式Loiter模式说明:悬停模式就是GPS定点模式。
应该在起飞前先让GPS定点,避免在空中突然定位发生问题。
其他方面跟定高模式基本相同。
4.返航模式RTL模式说明:返航模式需要GPS 定位。
当切换到返航模式时,飞行器会返回家的位置。
默认情况下,在返航之前,飞行器会首先飞到至少15米的高度(如果当前高度>15 米,就会保持当前高度)。
家的位置:解锁后,GPS首次定位的位置。
5.自动模式Auto模式说明:此模式下飞行器会自动执行地面站设定好的任务,例如起飞、按顺序飞向多个航点、旋转、拍照等。
6.特技模式Acro模式说明:特技模式是仅基于速率控制的模式。
特技模式提供了遥控器摇杆到飞行器电机之间的最直接的控制关系。
在特技模式下飞行,就像是不装飞空的遥控直升机一样,需要持续不断的手工摇杆操作。
7.运动模式Sport模式说明:运动动模式也可以说是“速率控制的自稳”加定高。
它的设计目的是用于飞行FPV(First Person View 第一人称视角)和拍摄移动镜头或者是飞越。
8.漂移模式Drift模式说明:飘移模式能让用户就像飞行安装有“自动协调转弯”的飞机一样飞行多旋翼飞行器。
9.引导模式Guided模式说明:此模式需要地面站软件和飞行器之间通信。
连接后,在任务规划器地面站软件地图界面上,在地图上任意位置点鼠标右键,选弹出菜单中的“Fly to here”(飞到这里),软件会让你输入一个高度,然后飞行器会飞到指定位置和高度并保持悬停。
PIXHAWK飞行模式简易说明
1.自稳模式Stabilize模式说明 自稳模式会自动保持多轴或直升机的水平并且维持目前的朝向。
2.定高模式AltHold模式说明:此模式不需要GPS支持,pixhawk会根据气压传感器的数据保持当前高度,但不会定点,飞行器依然会漂移,可以通过遥控来移动或保持位置。
定高时飞控通过控制油门来保持高度。
定高时但仍可用遥控油门来调整高度,但不可以用来降落,因为油门不会降到0。
3.悬停模式Loiter模式说明:悬停模式就是GPS定点模式。
应该在起飞前先让GPS定点,避免在空中突然定位发生问题。
其他方面跟定高模式基本相同。
4.返航模式RTL模式说明:返航模式需要GPS 定位。
当切换到返航模式时,飞行器会返回家的位置。
默认情况下,在返航之前,飞行器会首先飞到至少15米的高度(如果当前高度>15 米,就会保持当前高度)。
家的位置:解锁后,GPS首次定位的位置。
5.自动模式Auto模式说明:此模式下飞行器会自动执行地面站设定好的任务,例如起飞、按顺序飞向多个航点、旋转、拍照等。
6.特技模式Acro模式说明:特技模式是仅基于速率控制的模式。
特技模式提供了遥控器摇杆到飞行器电机之间的最直接的控制关系。
在特技模式下飞行,就像是不装飞空的遥控直升机一样,需要持续不断的手工摇杆操作。
7.运动模式Sport模式说明:运动动模式也可以说是“速率控制的自稳”加定高。
它的设计目的是用于飞行FPV(First Person View 第一人称视角)和拍摄移动镜头或者是飞越。
8.漂移模式Drift模式说明:飘移模式能让用户就像飞行安装有“自动协调转弯”的飞机一样飞行多旋翼飞行器。
9.引导模式Guided模式说明:此模式需要地面站软件和飞行器之间通信。
连接后,在任务规划器地面站软件地图界面上,在地图上任意位置点鼠标右键,选弹出菜单中的“Fly to here”(飞到这里),软件会让你输入一个高度,然后飞行器会飞到指定位置和高度并保持悬停。
apm飞行操作

001--APM开机和校准首次飞行检查列表下面是在飞场的一些基本检查:地面校准将你的发射器模式设为"手动"。
这是启动系统的安全模式,它允许系统通过摆动舵机来指示它们的状态。
地面启动时将有一系列的舵机摆动(开始时第一次,中途第二次,结束时第三次)当你在飞场启动飞控时,你应当将飞机*尽可能水平*(飞行姿态,所以如果尾巴是拖着的,抬起尾巴)放置在地面上,保持静止不动,直至三个彩色LED停止闪烁(大约30秒)。
这意味着陀螺仪已经完成校准,飞机可以起飞了(假设GPS已经锁定)。
如果你的飞机尾部擦地,那么应该在校准时将尾部抬起至平飞状态。
在地面启动结束之后,你还要等待 GPS 锁定才能飞行。
如果你没有等到 GPS 锁定,那么返航位置将设置错误,并且气压高度计校准也将错误。
通常应该在2分钟之内锁定。
如果你使用 MediaTek 模块,模块上的蓝色的LED会在等待锁定过程中闪烁,在锁定后常亮。
在这之后,APM 上的红色LED将停止闪烁并保持常亮。
如果 MediaTek 上的蓝色 LED 常亮,而 APM 上的红色 LED 却一直闪烁,按下 APM 上的重启按钮。
在重启之后,红色 LED 应该保持常亮。
每次飞行前: 起飞之前,将飞机拿在手中,切换到增稳模式,然后前后左右倾斜飞机,确认控制翼面正确摆动(让飞机返回水平飞行)。
这将确保你没有意外的移动拨动开关到错误位置,否则舵机将反向。
在每次飞行之前都应该检查一遍,就像你用发射器检查所有的控制翼面一样。
没有做该检查是炸机的头号原因。
第一次飞行强烈建议你切换到增稳模式或线操纵飞行模式,观察控制翼面的行为。
在你俯仰或侧倾时,翼面应该让飞机回到水平。
除非你根据你的飞机调整了配置参数,否则不建议使用除手动飞行之外的任何飞行模式。
第二次飞行第二次飞行时, 使用CLI将第三飞行模式 (遥控上模式开关的第3个位置)设为自动返航模式(RTL)。
这将测试导航功能。
飞机将回到你的位置,以固定高度盘旋(盘旋高度可以使用任务规划器设置)。
Pixhawk飞控快速使用指南
版本时间说明修订者V0.22014-12-16起草目录王成波快速使用指南零部件1附带SD卡的Pixhawk7电源模块2蜂鸣器8I²C分配器模块4SD卡USB适配器9四接口I²C分配器连接线5USB连接线10三线制伺服连接线6六线制连接线x211泡沫双面黏胶准备开始在APM固件的帮助下,Pixhawk能将任1安装何遥控飞机、直升机或者车辆变成多功能2连接私人飞机。
只要你有组装好的完整框架,3下载固件就可以遵照下面的指南安装Pixhawk。
4校正安装使用提供的泡沫双面胶将Pixhawk安装在飞机重心位置上。
注意确保Pixhawk上的箭头指向飞机前方。
将方形泡沫双面胶黏贴在飞控板的四个角上飞机正面购买在购买3DR整机框架和电子套件连接(要求)连接蜂鸣器和安全开关(可选项)使用3DR数传套件(要求)连接3DR GPS和罗盘,以提供飞机的飞行定位数里的六线制连接线将3DR无线据。
使用套件里提供的六线制连接线将罗盘连接到GPS接接收器连接到Pixhawk上的TE-口上;用四线制连接线,将MAG连接到I²C接口上。
LEM接口。
实现数据接收并与飞机进行实时交流。
(要求)使用6线制连接线将3DR电源模块连接到POWER接口上,利用锂聚合物(LiPo)电池直接向飞行器供电。
(可选项)I²C分配器扩展了I²C接口,使PiXhawk能连接多达四种的外设。
使用四线制连接线将分配器连接到Pixhawk上,并把罗盘模块、外部LED、数字空速传感器和其它外设添加到你的机架上。
了解更多在/learn了解LiPo电池及其供电机制。
连接无线控制模块PPM RC接收器使用三线制伺服连接线,将RC接口的三个管脚分别连接到地(—)、电源(+)和信号(S)。
FUTABA S.BUS接收器使用三线制伺服连接线,将RC接口的三个管脚分别连接到地(—)、电源(+)和信号(S)。
SPECTRUM卫星接收器PWM接收器在购买PPM解码器模块,将PWM RC接收器连接到Pixhawk上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
特技模式Acro Mode特技模式•特技模式是仅基于速率控制的模式。
•特技模式提供了遥控器摇杆到飞行器电机之间的最直接的控制关系。
•在特技模式下飞行,就像是不装飞控的遥控直升机一样,需要持续不断的手工摇杆操作。
细节特技模式有两种类型:默认的模式是基于地面坐标系的比率控制(AXIS_ENABLE = 1)。
第二是基于飞行器本体三个轴的转速比率控制(AXIS_ENABLE = 0)。
由于自我平衡能力不好,不建议用这种高难度模式飞行。
•特技模式下飞行器的滚转、俯仰、偏航三个轴的角速率由摇杆偏移角度来控制。
•摇杆居中意味着保持当前角度的姿态。
缺省模式也可以设置成为在摇杆居中的时候把飞行器控制到水平姿态。
•纵倾和侧倾的控制杆会使飞行器在相应的方向产生相应的倾斜角。
•为了使飞行器重新恢复水平,各轴摇杆需要向相反方向推。
•为了维持飞行水平,各轴控制摇杆需要不停地调整。
•缺省模式有两个参数。
以百分比的形式表示,各自乘以当前的滚转角和俯仰角,然后得到回到水平位置所需要的角速度。
•偏航控制杆的操纵方式,同稳定状态下的操纵方式相同。
•油门杆也是直接按照杆量加速或者减速控制控制四个电机。
•油门也需要不停地修正以维持飞行高度。
调试:•AXIS_ENABLE = 1 时的控制器基本上是转速比率控制稳定模式,有一些有用的功能。
有两个参数控制•ACRO_BAL_ROLL配置:•Beginner 200•Intermediate 100•Expert 0.•ACRO_BAL_PITCH配置:•Beginner 200•Intermediate 0•Expert 0.•参数ACRO_P:映射控制杆到所需的速度旋转。
•例如:ACRO_P等于4 就每秒转180°即4乘45°等于180°(4是最大值)。
•降低ACRO_P值,旋转速度变慢。
•稳定速率控制PID是•PID用在稳定模式作为主要角度控制参数。
•Rate_P是用于控制飞机振动程度。
•P值越高,电机振动程度越高。
•Rate_I设置用于减小四轴飞行器受外力的影响。
•Rate_I值高将快速调整保持所需速率,并很快调整,避免飞的过远。
•Rate_I值太低,四轴反应变慢可能导致飞的过远。
•把I设为0比设为很低的值更好•Rate_D是用于抑制四轴加速的灵敏度。
•Rate_D过高会导致异常振动和不时会感觉反应迟钝。
•但就算全部值(0.001-0.008)都试过了, 你的milage 也有可能变化.在自稳模式下调整Stabilization Angular Rate控制PID发挥最佳,然后特技模式调节ACRO_p使飞机工作在最佳状态。
定高模式Altitude Hold高度保持模式在高度保持模式,可以在保持高度的同时允许控制roll、pitch、yaw。
这页包含如何使用和调试定高的重要信息。
目录[显示]概览在高度保持模式(简称定高)模式下,主板会自动控制油门,从而保持高度不变。
Roll、Pitch和yaw的操作与自稳模式一样。
都是直接控制飞机的转动角度和朝向。
自动高度保持是多种飞行模式(Loiter, Sport等)的一种,所以这里的信息也适用于这些模式。
警告!飞控使用气压高度计测试结果作为高度基准。
如果在飞行区域的气压出现变化,飞行器的飞行高度将会受气压变化的影响而不准确,飞行高度就不是实际的高度(除非另外安装了超声波测距,并且飞行高度小于20英尺)。
26尺以下使用超声波测距会向飞行器提供更精确的飞行高度。
控制可以通过油门杆控制飞行器上升和下降的速率。
•当油门保持中挡(在40%-60%的地方),飞行高度不变。
•超出这个范围,飞行器会不同程度的(由油门控制)上下浮动。
上升和下降最大值是2.5m/s。
最大值由飞行参数PILOT_VELZ_MAX设定。
定高模式下,AC3.1以及之后的版本有解锁和锁定两种模式。
飞机在锁定状态时,在解锁前,必须原地复位几秒,使内部电路检测并指示已经着陆,才能解锁。
调试Altitude Hold选项下的变量P用于转换高度误差(期望高度和实际高度)至想要上升或下降的比率。
P值越大,定高能力越强,但如果设置得太高会导致油门不稳定。
Throttle Rate选项下用于(通常不用修改)把期望的上升或下降速率转换成对应的加速度。
油门加速的PID测得输出电动机的加速度转换误差(即所需加速和实际加速之间)。
如果修改P和I的值,应该保持P : I = 1 : 2(I值是P值的两倍)。
这些值不应增加,对于非常强大飞行器都减小50%,可能会获得更好的效果(即P值为0.5,I值为1)。
从闪存日志中验证定高的性能检查高度保持的性能,最好的方法是从飞行器上下载飞行日志,然后用mission planner打开,图形化CTUN信息的气压高度(BarAlt)、目标高度(WPAlt)、最后是GPS信息的RelAlt(基于高度的惯性导航,奇特的是不包含GPS数据)。
定高性能正常情况下:这三个图和如下所示。
常见问题1.使用定高模式时,剧烈振动可能导致飞行器迅速上升。
请访问震动检测和震动抑制Wiki页面,详细了解如何检测和减少震动。
2.飞行器缓缓下降或上升,直到控制其稳定才会正常。
一般情况下,是由于油门摇杆没有在中间位置导致的。
这种情况通常发生在从手动飞行模式(如稳定模式)切换到定高模式时,没有在中档悬停一会导致的。
请参阅相关Wiki 页面油门位置设置。
3.正当定高开启的时候,电机停了一下,然后就很快恢复正常。
这通常发生在快速攀爬时进入定高模式。
在飞行器转换到定高模式的时候设定目标高度,由于上升太快,而超出了预定位置。
保持高度的控制器,暂时“急刹车”减速,直到开始回退到目标高度。
解决方法是在飞行器稳定时再进入定高模式。
4.气压的变化会造成飞行器跑偏,向上或向下几米,且持续很长的时间,或者在地面站显示的高度不准确,偶尔会出现的负高度(即高度低于“家”的高度)。
5.高速向前飞行超出预定高度后,瞬时显示高度降低为1m ~ 2m。
这是由于空气动力学效应,在飞行控制器上形成瞬时低压,安装的高度保持控制器,认为它是向上爬,所以执行下降命令调整。
目前没有解决的办法,虽然增加了INAV_TC_Z 参数设置为7(默认值为5)可以减少影响,但又导致上述常见问题#1。
6.飞行器接近地面或降落时,高度保持性能变得不稳定。
这种情况可能是由螺旋桨涡流致压力变化。
解决方案是使飞行控制器远离螺旋桨涡流影响,或在适当通风的罩内保护它。
7.强光照射气压计会引起突然地高度变化。
APM2.x在2013年中之后在外壳内部贴上黑色胶带以对抗这个问题。
足够的功率足够的功率是非常重要的,如果没有足够的功率,控制器就会和电机争电用,这会导致飞机飞不到想要的高度。
理想情况下,约50%油门就可以悬停,高于70%是很危险的。
警告:如果配置了混合指数(译者注:原文为expo,单词是exponential,可以让油门曲线中部更平缓)会增加定高油门的死区。
自动模式Auto Mode自动模式在自主(自动)模式,飞行器将会按照任务脚本飞行,需预先编写并储存在自动驾驶仪上,包含自主导航航点,命令,事件。
本页面提供有关使用自动模式的信息。
获取有关创建任务脚本的信息,请访问使用航点和事件规划一个任务页面,有设定飞行计划的详细信息。
目录[显示]概览自动模式可以让飞行器按照内部的任务脚本控制它的动作。
任务脚本可以是一组航点,也可以是非常复杂的动作如:起飞、旋转X次、照相等。
自动模式依赖于GPS,因为任务脚本依靠GPS获得位置信息,所以在解锁和起飞之前必须让GPS先定位。
始终确保在自动驾驶仪和GPS模块上的LED灯表示的是GPS已完成定位:•APM上的蓝色LED常亮。
•GPS模块上的蓝色LED常亮。
•GPS+罗盘模块上的LED闪烁。
警告:在自动模式下,飞控主要使用测量空气压力的气压计决定高度(“压力高度”),并且如果在你的飞行区域气压改变,飞行器会随着气压而不是真实高度去改变高度(除非你安装并启用了声呐在离地6米以内飞行)。
在地面和在空中使用自动模式有两种方法进入自动模式:在空中或者在地面上。
如果你要从地面使用自动模式起飞,有个特殊的安全装置防止任务脚本执行,直到你解锁然后首次抬高油门。
这是为了防止在不小心碰到模式开关时你的飞行器就起飞了。
从地面使用自动模式起飞时,你最近一次的定高油门值作为油门控制的基准。
一旦飞行器起飞就会飞向第一个目标高度,然后开始执行之后的任务脚本。
当你已经在空中的时候切换到自动模式,会使你的飞行器前往第一个目标高度,然后开始执行当前的任务脚本。
结束任务任务脚本完成之后,飞行器不会飞回家,它只会悬停在最后的脚本所在位置,直到你通过模式开关重新获得控制。
如果你想要你的飞行器飞回到家,你可以添加一个RTL(回家)命令结束你当前的任务脚本。
如果你想要手动降落然后锁定电机(比预编程的自动降落命令更好),你必须切换到自稳模式。
记住,当使用RTL时,飞行器将返回家的位置(在GPS定位之后飞行器解锁时的位置),所以当你使用自动模式的时候,选择一个你希望飞行器返回的位置(没有障碍物并且远离人群)来解锁非常重要。
警告:重点要了解家的位置始终使用的是你的飞行器解锁时的实际位置!在任务脚本最后位置的RTL或是自动降落会强制降落然后停止电机。
你不能在自动模式手动降落,除非已配置以上两个选项之一,因为油门摇杆控制高度,并不是直接控制电机。
调试•Waypoint_Speed的值用来设置两个航点间的飞行速度。
•两个航点间的默认速度为6米每秒。
•NAV_PI用于让你的飞行器在两个航点间保持期望的飞行速度。
•NAV_P用于倾斜飞行器以达到期望飞行速度的速率,使其速率变快或是没有速度。
•P越大飞行器倾斜的就越大。
•Nav_I用于补偿外部会使飞行器达不到期望速率的力。
•高I值会快速达到期望的速率,也会快速减慢避免飞过头。
绕圈模式Circle Mode当模型启动绕圈模式时,它会开始以10m为半径绕圈飞行,机头朝向中点。
绕圈的半径可通过修改CIRCLE_RADIUS参数进行控制。
以米为单位。
将CIRCLE_RADIUS设为零,飞行器就会简单的呆在原位并缓慢旋转(可用于全景摄像)。
模型的速度(以度/秒为单位)可通过改变CIRCLE_RATE参数修改。
正值意味着顺时针旋转,负值意味着逆时针旋转。
如果向圆心的加速度超过了WPNAV_ACCEL参数的最大限制(以cm/s/s为单位),模型可能达不到期望的速度。
飞手不能控制roll和pitch,但可以通过油门摇杆改变高度,就像在定高和悬停模式一样。
飞手可以控制飞行器的yaw,自动驾驶仪不会重新获得yaw的控制权,直到绕圈模式再次启动。
在任务中,使用任务命令LOITER_TURNS调用绕圈模式。