基于Pro/E环境下的三维仿真技术浅析
浅谈Pro/E三维建模在钳工实训教学中的应用

浅谈Pro/E三维建模在钳工实训教学中的应用本文浅谈Pro/E三维建模在钳工实训教学中的应用。
一、钳工实训中存在的问题钳工实训是机械类专业的一门重要的实践课程,对于刚步入技工学校校门的学生而言,由于空间概念淡薄,又缺乏必要的生产实践经验,学生在实习上遇到的困难较多。
尤其是在零件加工工艺方面,传统教学法多是以文字叙述加之以简单的手工二维图形来讲授。
以錾口榔头的制作为例,如图1所示。
传统讲解工艺的方法是在黑板上写出13个加工步骤:检查来料尺寸¢30mm×120mm;按图样要求锉准20mm×20mm长方体;以一长面及端面为基准,用錾口锤子样板划出形体加工线(两面同时划出);然后用手锯按加工线锯去多余部分(放锉削余量);用半圆锉按线粗锉R15mm内圆弧面,用板锉粗锉斜面与R15mm圆弧面至划线线条。
然后用细板锉细锉斜面,再用细板锉细锉R15mm外圆弧面。
最后细板锉及半圆锉作推锉修整,达到各型面连接圆滑、光洁、纹理齐整;按图划出腰孔加工线及钻孔检查线;用直径9.7mm钻头钻孔;用圆锉锉通两孔,然后用掏锉按图样要求锉好腰孔;再将腰孔各面倒出1mm弧形喇叭口;并按图样尺寸划出4-4mm×45°倒角加工线;锉4-4mm×45°倒角达到要求。
方法:先用圆锉粗锉出R4mm圆弧,然后分别用粗、细板锉粗、细锉倒角,再用圆锉细加工R4mm圆弧推锉法修整;20mm端面锉成略凸弧面,并保证工件总长118mm;用砂布将各加工面全部打光,交件待验。
二、Pro/E的功能和特点Pro/E三维实体的建模功能可在计算机上虚拟建立立体模型并附以颜色,以动态显示,还可以把整个零件的加工工艺以及每一道工序所加工出来的形状表现得淋漓尽致。
不但可以加深学生对物体的感性认识,扩展和培养学生的空间构思能力,激发学生的学习兴趣,调动学生学习的积极性和主动性,而且还可以强化教师和学生的计算机应用能力。
基于Pro Engineer软件的装配体三维仿真设计方法

基于Pro/Engineer软件的装配体三维仿真设计方法1前言在机械制造业,现在有很多企业把产品的设计、分析、制造、产品的数据管理和信息技术集于一体.这种先进的管理方式属于企业信息化的范畴。
并且这种先进的管理方式也引发了设计领域的巨大的变化。
第一次大的变化是八十年代CAD软件的推广,国内普遍使用的是AutoCAD软件。
利用AutoCAD软件使许多机械工程师逐渐地甩掉了图板。
第二次大的变化是大量三维CAD软件的不断出现,如:Pro/Engineer,aolidworks,3Dmax等。
三维CAD 软件不仅仅可以实体造型,还可以利用设计出的三维实体模型进行模拟装配和静态干涉检验、机构分析和动态干涉检验、动力学分析、强度分析等。
因此运用三维设计软件的真正意义不仅仅在于设计模型本身,而是设计出模型后的处理工作。
AutoCAD软件虽然可以进行简单的三维实体模型设计,但设计出模型后的处理工作是无法实现的。
2 Pro/Engineer软件的介绍Pro/Engineer软件是美国PTC(参数技术公司)公司推出的工程设计软件,简称Pro/E。
其功能强大,参数化特征造型使其占据的三维设计领域的软件市场份额越来越大,尤其在我国的CAD/CAM研究所和工厂得到了广泛应用。
它的技术特点就是参数化管理,所有的算法都是失量化的,三维与二维图形元素间具有关联性,是目前不可多得的计算机辅助设计软件。
Pro/E经过了20,2000i,2000i2等版本的不断升级,也随着该公司对其他相关技术公司的合并进程,很多新功能都引人进来,因此使Pro/E的强大功能对所有产品开发者都具有高度的可用性。
从"拖动操作"到"智能制图",简化并精练了用户对Pro/E的体验过程。
简洁而直观的工作流程把常规操作中鼠标移动距离和菜单打开次数大大减少了。
并且把行业中功能最强大、最高效的工具应用到用户所有的设计任务中。
Pro/E还引用了行为建模功能:一种全面的、目标驱动的设计工具,能让工程师通过捕捉的设计要求和目标,来最佳地驱动产品的开发过程。
浅析三维数字化设计软件PRO/E在设计工作中的应用

浅析三维数字化设计软件PRO/E在设计工作中的应用作者:武全英来源:《现代职业教育.高职本科》 2017年第12期[摘要]因数字化技术的发展和应用以及中国制造2025的发展需求,三维设计软件越来越显示出其强大的功能,给设计者和制造者带来极大的设计及制造便捷。
PRO/E 作为三维设计软件中的一种,有其独特的功能和技巧,能极大地提高设计效率,让设计工作变得更加简捷。
将对在实际工作中及教学过程中所应用的相关功能做一介绍。
[关键词]三维设计软件;PRO/E;设计工作[中图分类号] G712 [文献标志码] A[文章编号] 2096-0603(2017)34-0188-02“工欲善其事,必先利其器”。
有了更好的设计工具,工程技术人员在更短的时间能完成高质量的产品。
随着数字化设计技术的发展,三维设计软件得到前所未有的广泛应用。
PROE 作为三维设计软件中的一种,有着强大的功能,能极大地提高设计效率,让设计工作变得更加快捷高效。
一、PRO/E软件简介PRO/E是美国参数技术公司(Parametric Technology Corpora-tion,简称PTC )的重要产品。
在目前的三维造型软件领域中占有着重要地位,并作为当今世界机械CAD/CAE/CAM领域的新标准而得到业界的认可和推广,是现今最成功的CAD/CAM软件之一。
PRO/E软件主要包含四大功能,即三维建模功能、辅助制造功能、模具设计功能、失效分析功能。
其中包括参数化功能定义、实体零件及组装造型,三维上色实体或线框造型棚完整工程图产生及不同视图(三维造型还可移动,放大或缩小和旋转)。
采用这种手段来建立形体,对工程师来说更自然、更直观,这种设计极大地提高了设计者的效率。
二、PRO/E软件的主要功能传统的计算机辅助设计软件主要是提供方便的设计工具用以辅助设计,缺乏分析问题和解决问题的能力。
近几年来,为了克服计算机辅助设计的不足,人们将人工智能和专家系统技术应用于计算机辅助设计系统,进行了智能计算机辅助设计系统的研究,PRO/E软件具有很强的三维建模功能,能充分体现概念设计的要求。
基于Pro/E吊杯式栽苗器的三维建模与运动仿真分析

农 机 化 研 究
第 1期
基于 P r o /E 吊 杯 式 栽 苗 器 的 三 维 建 模 与 运 动 仿 真 分 析
张小 志 ,李 旭英 , 田 阳 ,迟 明路
( 内蒙 古 农业 大 学 机 电工 程学 院 ,呼 和浩 特 摘 0 1 O 0 1 8 )
要 :吊杯 是 吊杯 式 移 栽 机 的 核心 部 件 , 其 运 动过 程 将 直 接影 响到 秧 苗 的移 栽 质 量 。 因此 , 对 于 吊杯 的运 动 分
析 显得 尤 为 重 要 。 目前 , 许 多 学 者 已研 究 了 吊杯 运 动 的 轨 迹 对 移 栽 质 量 的影 响 , 但 吊杯 的杯 嘴 运 动 对 于栽 植 效 果 的影 响并 未 进 行 相关 研 究 。为此 , 基于 P r o / E完 成 了 吊杯 式 栽 苗 器 各 零 部 件 的三 维 实 体 建 模 , 并 进 行 吊杯 式 移 栽器 的虚 拟 装 配 和运 动 仿 真 分析 。仿 真 结果 : 测得 了杯 嘴 运 动过 程 的位 移 一 时 问特 性 曲线 , 分 析 得 到 了栽 苗 器 杯 嘴 的最 大 开 E l 宽度 和杯 嘴 的 开 E l 运动时间 , 为 优 化 吊杯 式 栽 苗器 的结 构 提供 了基 础数 据 和 理论 依 据 。 关 键词 :栽 苗 器 ;移 栽 机 ;凸 轮机 构 ;三 维建 模 ;运 动 仿 真
农产 品提前 上市 , 增 加其 经济 价值 , 还可 以保 温 、 保
湿、 消 除 杂 草 。所 以 , 到 目前 为 止 , 膜 上 移栽 技 术 在 我 国得 到 了 广 泛 的应 用 ¨ 。 很 多 学 者 对 移 栽 机 进 行 了 设计 研 究 , 封 俊 等 分 析 了 吊杯 式 移栽 机 栽 苗 器 的 运 动 轨 迹 与特 征 系 数 的关 系 J , 安 凤 平 等 提 出 了“ 零 速
基于Pro/E的曲柄压力机三维建模与运动仿真

基于Pro/E的曲柄压力机三维建模与运动仿真摘要:Pro/E软件是一款广泛应用于机械专业的三维设计软件,本文利用Pro/E对曲柄压力机进行三维建模和运动仿真,为其开发设计提供可靠的分析依据,极大地缩短产品开发周期并提高产品可靠性。
关键词:曲柄压力机;Pro/E;三维建模;运动仿真1引言曲柄压力机是一种最常用的冷冲压设备,随着新工艺新设备的不断出现,一些形状复杂的特殊零件可以直接成形。
本文通过Pro/E对曲柄压力机进行三维建模和运动仿真,可以直接获得曲柄压力机地运动特性曲线,从而缩短了曲柄压力机研发周期,降低了试验成本,提高了企业的经济效益。
2曲柄压力机的三维建模曲柄压力机由机身、电动机、传动装置、飞轮、曲轴、连杆和滑块、操纵系统及辅助系统与装置组成。
为了实现曲柄压力机的三维建模,应采取自下而上的方法进行建模。
打开Pro/E后新建一个零件,点击拉伸选项进入草绘,选择草绘平面并绘制草绘曲线,根据零件尺寸要求进行拉伸旋转、扫描、倒角等特征,零件创建过程及其效果如图1所示。
建模时要做好基准线、基准面,以便裝配使用。
零、部件建模过程就是一系列拉伸、旋转、对称等指令,在此不一一赘述。
绘制完零、部件图后,根据各部件在整机中的位置、作用以及运动关系进行合理的虚拟装配,以保证整机定位可靠、运动灵活,在运动仿真时不发生干涉现象。
装配是在Pro/E的组件模块中实现的,装配步骤如下:选择文件——新建——组件模块——取消使用缺省模板——插入元件——调入零件模型——给零件施加定位约束——插入下一个元件——调入零件——给零件进行定位约束。
Pro/E為各部件之间的不同装配关系提供了与之相对应的装配形式。
若装配件之间无相对运动,则选用“放置”选项定义板定义两个零件的约束关系;否则,选用“连接”选项板定义零件之间的连接关系和约束关系。
在装配时,如果当前约束关系不能使装配件处于“正常的工作位置”,则通过“拖动”选项板上的“平移”、“旋转”等选项对配件进行调整修改,直至符合要求为止。
基于Pro/E的溜槽传动箱三维运动仿真

是 通过 Po 交互 环境 直 接创 建参 数 r/ E
化实体模型。 溜槽传动箱的双联齿轮、 溜槽 倾 动 机 构等 复杂 装 置 主 要通 过这 种 方 式 构
④ 再 点 击 草 绘 工 具 ,进 入 草 绘 界
面,建立一个封闭的渐开线轮齿,如图 1 。
1 5
此 步骤 中 ,应 利用 “ 过边 创 建 图元, 工 通 , 具 ,通 过 点 击 上 一 步创 建 的渐 开 线基 准 曲 线 , 建一条 与 基准 曲线 完全 重合 的渐 开线 创
1 3 装配 .
⑤ 再通过拉伸工具、轴 向阵列完成整 个 轮齿特 征 。 图 2为溜 槽传 动箱 双联 齿轮 实 体模 型 。
PoE 采 用 的是 “自下 而 上 ” r/ 的建 模 方 式 ,即先 设计 零部 件 , 由零 部件 组装 成 整 再 体 。 部件 装配 即定义零 部件 模 型之 间 的装 零 配约束, 也就 是 在各 零部 件之 间建 立一 定 的 链 接 关系 ,并对 其进 行约 束 ,从而 确定 各 零 件 在 空 间的具 体位 置 关系 。
图元 。
Fg3F mi bo ot GB T 7 2 i. a l t f l( / 5 8 ) ya b
利 用 族表 建 立 标 准 零 件 库 ,可 以避 免 重 复建 模 ,节约 时 间 。 需要 使J 不 同规格 的 { j 螺栓 , 需 调用族 表 中 已有 数据 , 自动 生 只 将 成所 需 的螺 栓 。 ( 3 )美化 模 型
基于 P o 的溜槽传 动箱三 维运 动仿真 r/ E
韩路
摘
吴华松
要 :基于 PoE软 件 ,建立 了 8 0 高 炉溜 槽传 动箱 的三维 实体 模型 ,并 定义 了各 r/ 0m 级
基于Pro_E的工业机器人机构设计与运动仿真[1]
![基于Pro_E的工业机器人机构设计与运动仿真[1]](https://img.taocdn.com/s3/m/4eb460bafd0a79563c1e727c.png)
基于Pro /E 的工业机器人机构设计与运动仿真陕西科技大学机电工程学院 兰 勇 文怀兴 白 路 工业机器人是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化生产设备[1]。
特别适合于多品种、变批量的柔性生产。
它对稳定提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用具有现实意义。
典型的工业机器人如焊接机器人、喷漆机器人、装配机器人等大多固定在生产线或加工设备旁边作业,随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透[2]。
1 机器人Pro /E 三维建模与装配111 机器人机械结构方案设计与分析机器人手臂是执行机构中的主要运动部件,用来支承腕关节和末端执行器,并使它们能在空间运动。
为使机器人手臂能达到工作空间的任意位置和姿态,同时结构简单,容易控制,综合考虑后确定该机器人为6自由度,其中手臂和手腕各3个自由度,采用动作和轨迹更灵活的关节型机器人,如图1所示。
图1 关节机器人结构示意图112 Pro /E 三维建模Pr o /E 三维实体建模设计系统是美国参数化技术公司(PTC )的产品。
PT C 公司提出的单一数据库、参数化、基于特征和完全关联的概念从根本上改变了机械CAD /CAE /CAM 传统的概念,这种全新的设计理念已经成为当今世界机械领域的新标准[3]。
通过对工业机器人任务以及使用条件的分析并参考同类型机器人大体确定机器人各结构尺寸,然后在Pr o /E 三维实体建模下构建出机器人整体结构的三维模型和各臂膀构件的实体。
机器人部分零件三维模型如图2所示。
图2 主要零件三维图113 Pro /E 三维装配设计完成各零件建模后,在组件模式下进行装配。
用Mechanis m 模块对组件进行运动仿真,组件之间要有相对运动。
因此,在进行组件装配时,采用部分约束。
基于Pro/E的配气机构三维运动仿真设计

计的方法。
关 键词 : 气机 构 ; 配 凸轮 型 线 ; 配气 相 位 角 ; 真 仿 中 图分 类 号 : P l T 3 文 献 标 识码 : B
利用 Po E软件 进行 零件 的三维 设计 已经被 越来 越广 泛地 应 用 , 而 , r/ 然 要利 用它 进 行 机 构 的 运 动 仿 真 设 计 还 比较 复 杂 。 此 次 配 气 机 构 设 计 以 R 2 2 0 J 柴油 机为原 型 , 于 Po E野 火 3 0版 , 用 了 T p—d w 1V 8 Z 型 基 r/ . 采 o o n协 同设计 模 式 , 骨架 模 型定位 , D U F精确 凸轮 轮 廓建 模 和 三 维 机构 连 接 方 法 , 实现 了全 三维 配气机 构 的运动 仿 真 。
成 两个 部分 , 以上级 骨架 的安 装定 位信 息为 设计 基准 进行 建模 , 这样 做 的好
处 是两个 总 成部 分可 同步 进 行 , 不 干 涉 。其 中 , 缸 盖 总 成 组 件 由气 缸 互 气
盖 、 臂组 件 、 摇 横臂 组 件 、 门组件 等 组 成 ; 气 凸轮 轴 总成 组 件 由凸 轮轴 、 杆 推 组件、 挺杆 组件 组成 , 用整 体式 结构 , 采 分左 、 2根 , 右 两缸 1节 , 为 3个 单 分
分 , 个部 分 分别 以一个 骨 架模 型 零 件 进行 三 维 建 模 , 个 零 件 结 构 简单 , 每 每
睇
鬟 鬟鬟l黪 _
容 易建模 。然后 将所 有 完 成 的零件 进 行相 应 的合 并及 剪 切就 可 以完 成气 缸 盖 的建模 了 , 个零 件 的特征 过 程非 常 干净 , 续 如有 设 计改 动 只需 在相 应 整 后 的骨 架模 型 中进 行 即可 , 改 容 易 , 修 出错 率 低 。 图 1 图 2 图 3分 别 显 示 了 、 、
基于Pro/E的翻车机的三维动画仿真

近年来 ,随着计算 机技 术 的飞速发 展 ,基 于微 机平 台 的三维软件 不 断推 出 ,三维 动 画设 计 已经渗 透 了社 会生 活 的各 个 领域 ,而 3sm x 为 功 能强 d a 作 大 的三维 动 画 制 作 工 具 已成 为 广 泛 使 用 的动 画 软 件 。3smx软 件 在 色 彩 、材 质 、动 画等 方 面都 有 d a 着强 大 的优 势 ,但是 该软件 在建立 有着 较为复 杂装
上梁 帽 的上面 板直径大 于 围板直 径 ,围板打双 面坡 口后 与其 上面 板焊接 。 ( )在 围板下 方 与一件环 形 2
化 ,在质 量上也 相 差不 多 ;制作 圆形 上梁 帽仍选 用 Q4 35钢板 ,此 钢 板 具 有 良好 的综 合 力 学 性 能 ,塑 性 和焊接 性能 良好 ,冲击 韧性 较好 。在焊 接此钢 板
Ab ta t sr c :T e p p re p u d o ob i h h a e x o n sh w t u l te 3一D d l o se b e c mp n n n a t o a o u e rw t r/ d mo e ra s m l o o e ta d p r f g n d mp i P o f s w h E sf ae a d h w al oT T lsit d x s f r lme t D a i td s lt n o t pe p rt n p o es o w r o t t l fl S L f e o3 ma t et i e n n ma i ai f p lr e a o rc s . t n or s n i n s o wa o mp 3 e mu o i o i I i a n w D a i t i la o c n l y fr3一wa o u p r t s e 3 nm e s a d mu t n t h oo i e g o g nd m e. Ke w r s y o d :w o u p r P o f ae 3 s m x sf ae tr edme s n l i t n g a n d e ; r/E s t r ; d a t r ; h e i n i a m i m o w o w o n a a o
基于Pro/E软件数控加工仿真方法的应用与分析

图3 钻6 孔数 控 程 序 坐 标 系 一
参考文献 : 『 ] 义 平 . 控 编 程 使 用 技 术 [ . 京 : 华 大 学 出版 1张 数 M]北 清 社 , 0 9 9 — . 2 0 :8 1 3 1 『 ] 益 民. 械 制 造 工 艺 设 计 简 明 手 册 【 . 京 : 械 2李 机 M]北 机
基 于 Pr / oE
控 加 工 仿 真 方 法 的 应 用 与 5 析 - )
王立涛 韩 兴
720 ) 10 0
( 西工业职业技术学院 , 西 成阳 陕 陕
摘 要 :本 文 介 绍 了 使 用 P fE软 件 的 P 0_C模 块 进 行 数 r/ ) r/ N
~
控 加 2 时 , 运 用 屏 幕 演 示 、 C 测 和VE I U 软 件 三种 方 法 7 - N 检 RC T 进 行 数 控 加 工仿 真 . 对 数 控 加 工 的 刀 具 轨 迹 进 行 模 拟 显 示 . 并 分 析 了数 控 加 工 工序 设 置 的合 理 性 . 、 关键 词 : P 0E 件 P0NC 块 数 控加 工 仿真 方 法 刀 r/软 r, 模
具轨迹 应 用与 分析
根 据 凸 模 零 件 图进 行 数 控 加 工 设 置 和 自动 编 程 首 先 , 据 凸模 零 件 图进 行 三 维 实 体 造 型 , 图 1 示 。 机 技 术 的 发 展 ,产 生 了可 以模 拟 实 际 加 工 环 境 及 其 工 作 状 态 的计 算 机 数 控 加 工 仿 真 软 件 。使 用 数 控 加 工 仿 真 技 术 进 行 实 际加 工 前 的 模 拟 加 工 .可 迅 速提 高操 作 者 的编 程 、操 作 技 能 。本 文 通 过 具 体 实 例 介 绍 了在 使 用 Po 软 件 的 rE / P o C 块 进 行 数控 加 _ 时 .运 用 不 同 的 数 控 仿 真 方 法 对 零 rN 模 / I 二 件 加 工 的 刀具 轨 迹 进 行 模 拟 ,帮 助 操 作 者 及 时 发 现 不 合 适 的 刀具轨迹 , 对数控加工工序进行了合理的改进。 并
基于Pro/E的虚拟样机技术在三维雕刻机设计中的应用

Z o L n -Z u C a g—a 。Z o g J n hu ig h h n n h n u
( etfpe s nm cie n r io D p r io ah r a d e s n o ci ny p ci
,nvrt i c u i syo s e e ei fcn
a d p r me e p i z in。t e sr cur e i n i mp v d. n a a t ro tmiat o h tu t e d sg si r e o Ke r y wo ds:vru lp o oy e tch i u i a r t tp e n q e; Pr/E ;kie i i l t t o n tc smu ai on; p rm ee pt z to aa tro i a in;3D n a ig ma h n mi e g vn c i e r
于 一体 , 现 产 品 设 计 、 析 的 参 数 化 和 全 相 关 , 映 机 构 的 实 分 反
真 实运 动情 况 。
在 P0E中进行 机构 仿 真有两 种方 法 : Mehns 机 r / ① caim(
构 设 计 ) 能 , 可通 过 用 户 对 各 种 不 同 运 动 副 的 连 接 设 定 , 功 它 使 机 构 按 照 实 际 的 运 动 要 求 进 行 运 动 仿 真 ; Po Mehnc ② r / ca i a M t n功 能 , oi o 该模 块 是 一 个 完 整 的 三 维 实 体 静 力 学 、 动 学 、 运 动 力 学 仿 真 与 优 化 设 计 工 具 , 用 模 块 可 快 速 创 建 机 构 虚 拟 利 模 型 并 能 方 便 的进 行 分 析 , 而 改 善 机 构 设 计 , 省 时 间 , 从 节 降
基于Pro_E的三维机械设计与运动仿真

基于Pro E的三维机械设计与运动仿真郑伯学,吴俊海(辽宁工程技术大学职业技术学院,辽宁阜新123000)摘要:在机械设计中,尤其是在零件的三维造型和运动仿真方面,计算机辅助设计(CAD)技术已经成为重要的设计工具。
Pro E是CAD C AM C AE领域的一种优秀软件,其强大的参数化造型、产品装配和运动仿真与分析等功能已经广泛应用于工业产品设计。
关键词:计算机辅助设计;Pro E;三维造型;运动仿真中图分类号:TP39 文献标志码:A 文章编号:1003-0794(2007)12-0094-033D Design and Motion Simulation Based on Pro EZHENG Bo-xue,WU Jun-hai(Liaoning T echnical University Vocational Technology College,Fuxin123000,China)Abstract:In mechanical design,C AD technique already become an important tool for design,especially the three dimensional modeling and motion simulation.Pro E is a kind of excellent softwares in C AD CAM C AE field.Its technical of full para metric product design function can be used for three dimensional modeling design and it also includes assembling and motion simulation analysis function etc..Key words:computer aided design;Pro E;3D modeling;motion simulation0 引言面临激烈的市场竞争,每个企业都将产品设计这一环节作为企业的生命线,没有适销对路的创新产品,即使企业设备再先进,管理再科学,也会在竞争中败下阵来。
浅析Pro/E的运动仿真

浅析PRO/E的运动仿真摘要:在市场竞争主导社会的今天,产品仿真技术日益显的重要,本文介绍了仿真的分类,重点简述了PRO/E的运动仿真及其意义,并通过曲柄滑块机构的运动仿真实例简述了如何利用PRO/E进行运动仿真,展现了Pro/E的运动仿真的功能。
关键词:仿真;仿真分类;运动仿真;PRO/E;Mechanism;Mechanica1、运动仿真1.1仿真的定义及分类仿真(Simulation)是指为了研究一个存在或设计中的系统,而对从该系统中抽象出来的模拟系统(即仿真模型)进行反复试验、实验研究的一系列过程。
图1 仿真的分类如图1所示:仿真根据其模型类型(物理模型、数学模型)及应用可以分为:全物理仿真、半物理仿真及数学仿真三种。
全物理仿真是指仿真模型全部是实物模型的仿真,即仿真模型就是真实样机;半物理仿真即仿真模型的一部分是数学模型,而另一部分是实物模型的仿真;数学仿真又称计算机仿真,是指通过建立系统(或过程)的可以计算的数学模型(仿真模型),根据该模型编制仿真程序,进而将该程序装入计算机进行一系列仿真试验或实验,达到掌握实际系统(或过程)在各种内外因素变化下性能的变化规律的目的仿真。
计算机仿真根据其应用可以分为:系统分析和设计及制成仿真器两种,前者根据其在CAD/CAPP/CAM系统中的应用又分为产品形态仿真、装配关系仿真、运动学仿真等七种。
计算机仿真与物理仿真相比具有时间周期短、费用低、通用性强、修改调整方便等优点,因此,其在产品的分析设计阶段应用较广,是目前研究的重点。
1.2PRO/E的运动仿真在传统的设计与制造过程中,首先是概念设计和方案论证,然后进行产品设计,为了验证设计的合理性,通常要制造样机进行性能试验,有时这些试验是破坏性的。
当通过试验发现设计缺陷时,又要重新修改设计,并用样机重新验证。
只有通过周而复始的“设计-试验—设计”过程,产品才能达到要求的性能。
这一过程是冗长的,尤其对于结构复杂的系统,采用传统的设计开发思路其设计周期无法缩短,更谈不上市场竞争力。
基于ProE的多功能豆浆机的设计三维建模与动态仿真

基于Pro/E的豆浆机的设计—三维建模与动态仿真摘要随着人们生活水平的日益提高,豆浆已经走向了人们的餐桌,因此,豆浆的相关产品进入了人们的视线,引起了人们的注意,在追求方便快捷的生活已经成为时代主旋律的情况下,豆浆机作为一件方便的日常厨房工具,正在逐渐走入便捷的生活时代。
本课题的目的是运用Pro/E软件对豆浆机的结构进行优化设计,了解一般产品设计的基本过程。
应用Pro/E软件仿真系统优化豆浆机的使用功能,克服现在一些豆浆机的费时、费力、不易于清洗和外观不美观等缺点。
并探索Pro/E在三维动态方面的应用价值,以及Pro/E软件在当今的工业生产中的应用。
关键词:Pro/E;豆浆机;零件装配;动态仿真Based on the Pro / E soymilk machine design—Three dimensional modeling and dynamic simulationAbstractWith the improvement of people's standard of living, soy milk has been toward the table of people, therefore, milk related products into the line of sight of people, caused the attention of people, in the pursuit of convenient life, has become the main theme of the times situation, soya-bean milk machine as a convenient daily kitchen tools, is gradually into convenient life era.The purpose of this project is to use Pro / E software to optimize the structure of the soybean milk machine design, the general understanding of the basic process of product design. Application of Pro / E software simulation and system optimization of soya-bean milk machine use function, overcoming some soybean milk machine time-consuming, laborious, is not easy to be cleaned and poor appearance. And exploration of Pro / E in 3D dynamic aspects of the application, as well as the Pro / E software in today's industrial production and application.Key words: Pro/E; Pro/E; soya-bean milk machine; parts assembly; dynamic simulation目录1 绪论1.1多功能豆浆机的发展及Pro/E的应用 (1)1.1.1 现今生活对多功能豆浆机的需求 (1)1.1.2 Pro/E在工业中的应用 (1)1.1.3 多功能豆浆机的发展历程 (2)1.2 Pro/ENGINEER软件的简介 (2)1.2.1 Pro/ENGINEER的发展历程 (2)1.2.2 Pro/ENGINEER主要模块及应用领域 (4)1.3 本课题的主要研究内容 (6)2 多功能豆浆机的组成零件及绘制2.1多功能豆浆机的组成零件 (6)2.2多功能豆浆机零件的绘制 (6)3 多功能豆浆机零件的装配3.1建立新文件并固定顶盖 (8)3.2装配加热管 (10)3.3装配刀具 (12)3.4装配杯体 (14)3.5 装配把手 (16)3.6 底座的装配 (18)4仿真运动4.1仿真运动的参数设置 (20)4.2模拟仿真运动效果 (23)5 结论与展望5.1结论 (25)5.2课题展望 (25)参考文献 (26)致谢 (26)基于Pro/E的多功能豆浆机的设计—三维建模与动态仿真1 绪论1.1多功能豆浆机的发展及Pro/E的应用1.1.1 现今生活对多功能豆浆机的需求随着生活水平提高,生活节奏的加快,人们的生活习惯也随之改变,以往慢节奏慢慢的被淘汰。
基于Pro_E的汽车门锁系统的3D建模及运动仿真和动力分析

文中在汽车门锁系统的设计过程中,应用了 CAD/CAM/CAE 集成制造软件 P ro /En g i n e e r ,对汽车门锁系统进行了 3D 建模、装配、运动仿真及动力分析。
关键词:汽车门锁;P ro/En g i n e e r ;运动仿真;动力分析 中图分类号:T P391 文献标识码:A文章编号:1002-2333(2008)12-0078-03 Motion Simulation and Dynamic A nalysi s of A utomob il e Door Lock Based on P r o/E ngine e rLI Chun -f e n g , Y I N M i ng-d e(S ch o o l of M e ch a n i c a l and E l e ct r o n i c En g i n e e r i n g , N a n ji n g Un i v e r s i ty of A e r o n a ut i c s and A s tr o n a ut i c s, N a n ji n g 210016, Ch i n a ) Abstract : The d e s i g n e r s of a u t o m o b il e door l o c k have some d i ff i cu l t i es because of the v a r i e t y and c o mp l e x i t y o fa u t o m ob il e door l o ck. To enhance the e xp l o i t a t i o n ratedc a p a c i t y, better sa t i s f y thed es i g n request, in the a u t o m o b il e door l o c k d e s i g n process, the paper a pp li e d CAD/CAM/CAE i n t eg r a t e d manufacture software Pr o /En g i n e e r for 3Dm o d e li n g , m o t i o n s i mu l a t i o n and dyn a m i c a n a l y s i s .Key words : a u t o m o b il e door l o ck; Pr o /En g i n e e r; m o t i o n s i mu l a t i o n; dyn a m i c a n a l y s i s汽车门锁机构是由多个构件以一定的运动副连接起 来的较复杂的空间机构,它是汽车的重要附件,其可靠性 和操作性能直接关系到汽车的使用性能和安全性能。
基于Pro/E的数控车削加工仿真

基于Pro/E的数控车削加工仿真随着工业技术的飞速发展,计算机辅助设计软件已经成为现代制造业的核心。
PRO/ENGINEER(Pro/E)是一款强大的三维设计软件,它能够帮助工业制造飞机和整个机械系统的设计和制造。
Pro/E也被广泛应用于数控车削加工仿真,以保证生产效率和质量一致性。
数控车削加工仿真提供了许多优势,最显著的就是它可以大大减少生产期间的错误和停机时间,提高生产效率。
在Pro/E中,数控车削加工仿真可以被用来设计和测试机械组件,以便更好地满足生产需求并降低生产成本。
Pro/E的数控车削加工仿真越来越流行,因为它能够模拟机械零件的运动轨迹和操作过程,从而优化机械部件的设计和性能。
在Pro/E的仿真中,用户可以在实际车床和刀具之前试运行程序,确保零件的准确性和一致性。
Pro/E的仿真还可以检测错误和冲突,提出更好的解决方案,以确保生产系统的顺畅运行。
此外,Pro/E的数控车削加工仿真还可以通过多种方式进行优化,例如优化进给速率、切削速度、切削深度和切削工具半径等。
通过这种仿真和优化方法,生产系统可以在更短的时间内生产更多的部件,同时可能还将节省材料和减少机床折旧。
在Pro/E中,数控车削加工仿真可以通过图形用户界面(GUI)进行互动式操作和分析。
这种直观的用户界面使得仿真过程变得简单和容易理解,且能够帮助用户更好地了解削削加工的原理和机理,有助于精确模拟车削、铣削、钻削等工艺过程,以确保生产过程中产品加工质量的稳定另外,利用仿真技术还可以进行模拟分析,以查明生产系统的弱点和瓶颈,然后采取行动来改善这些问题。
这些改进可以固定甚至提高质量,短时间内实现成本削减。
总之,Pro/E的数控车削加工仿真是现代制造业中的一个重要工具,它可以大大提高生产效率和部件质量,并促进生产流程的优化。
利用仿真技术在工业设计中的广泛应用,如今已成为保证产品质量和生产效率的不可或缺的一部分。
在全球竞争日益激烈的市场中,Pro/E的数控车削加工仿真已成为行业领先者的必要工具。
基于Pro/E的模具设计与仿真加工

基于Pro/E的模具设计与仿真加工通过模具设计与仿真加工实例,阐明了Pro/E结合MasterCAM进行模具设计与数控加工仿真的方法和技术优势,利用Pro/E进行零件的快速三维造型及模具设计,并导入MasterCAM进行数控加工仿真。
该方法有效缩短模具设计及制造周期,降低了开发成本,提高了加工效率。
标签:模具设计;仿真加工;Pro/E;MasterCAMF491 引言目前,随着计算机技术、CAD/CAM技术的迅猛发展,基于设计人员自身经验的二维模具设计与加工方式越来越难以适应现代化生产和集成化技术的要求,一些先进CAD/CAM软件不断应用到机械制造业的产品设计和制造过程中,其中Pro/E因其强大的参数化设计功能、强大的实体造型及曲面造型功能、逐渐成为模具设计的主流CAD软件之一,但在CAM领域,由于Pro/E编程参数设置比较繁琐、程序编制流程长,所以在实际应用相对较少。
而MasterCAM在制造方面恰恰能有效地弥补这些不足,MasterCAM软件优越的二维、三维加工功能使模具设计人员设计的复杂产品零件更容易实现,加工思路具体,刀具设置更加人性化以及与其他软件数据转换简单明了,另外其优秀的程序后处理功能能够生成适合当今流行的大部分数控机床的数控程序,具有易于上手、可靠性高、实用性好等特点。
因此,采用Pro/E进行快速的零件三维造型设计及模具设计,并导入MasterCAM进行数控加工仿真并生成数控加工程序,可使模具设计与制造一体化,从而提高模具质量,缩短开发设计与制造周期,为企业提供一种新的CAD/CAM综合方案。
现以肥皂盒盖的模具实例形式,阐述Pro/E和MasterCAM 软件两者相结合在模具设计及仿真加工的应用。
2 基于Pro/E的模具设计流程2.1 使用Pro/E进行零件的三维实体造型利用Pro/E 5.0强大的参数化设计功能、强大的实体造型及曲面造型功能进行三维实体设计,最终生成肥皂盒盖的薄壳实体(如图1)。
基于Pro-E的机械手抓取工件运动仿真分析-毕业论文名师教案与资料

毕业设计基于Pro/E的机械手抓取工件运动仿真分析姓名:学号:班级:专业:机械工程及自动化所在系:机械工程系指导老师:基于Pro/E的机械手抓取工件运动仿真分析摘要随着科学技术的发展,自动化应用的程度对工业生产效率的影响程度越来越高。
人工操作及旧有的固定式输送带为主的传统搬运方式,已无法满足高度的自动化操作的需要。
机械手是近年来发展起来的自动化操作设备,他可根据预先编制的程序完成预期的作业。
机械手工作的准确性及对工作环境适应能力,使其在工业生产中有着越来越广泛的应用。
Pro/E是美国参数化公司(PTC)推出的一款高端三维设计软件,其具有基于特征、关联、参数化等特征。
该软件集合了零件设计、产品装配、模具开发、加工制造、钣金件设计、铸造件设计、工业设计、逆向工程、运动仿真、机构分析、有限元分析、产品数据库管理等功能,从而使设计师极大地缩短了产品开发的时间并简化了开发的流程。
[1]本次设计根据设计任务书主要设计一种可抓取工件且具有多自由度的机械手。
在设计过程中采用Pro/E为设计平台,进行三维建模、产品装配并进行机构仿真,从而最终实现机械手的设计。
关键词:机械手;Pro/E;三维建模;机械仿真Manipulator Based on Pro/E to Grab Workpiece MovementSimulationABSTRACTWith the development of science and technology, the application of automation degree of the influence degree of the industrial production efficiency is higher and higher.Manual operation and the old traditional handling way, stationary belt have been unable to meet the needs of the high degree of automation.Manipulator is the automation equipment developed in recent years, he can according to the program in advance to complete the desired operation.The accuracy of the manipulator work and ability to adapt to working environment, make it has more and more widely used in industrial production.Pro/E is the parametric company (PTC) launched a high-end 3 d design software, it is based on feature, correlation and parametric feature.The software collection from the part design, product assembly, mold development, manufacturing, and processing sheet metal parts design, casting parts design, industrial design, reverse engineering, motion simulation, mechanism analysis, finite element analysis, product database management, and other functions, so that designers have greatly shortened product development time and simplify the development process.[1]This design according to the design plan descriptions of the main design of a grab workpiece and has many degrees of freedom manipulator.In the design process using Pro/E platform for design, 3 d modeling, product assembly and mechanism simulation, so as to achieve the design of the manipulator.Key Words: Manipulator; Pro/E; 3D modeling; Mechanical simulation目录第一章绪论 (1)1.1 前言 (1)1.2 机械手的概述 (1)1.2.1 机械手简介 (1)1.2.2 机械手结构组成 (2)1.3 机械手的分类 (4)1.4 机械手的发展历史 (5)1.5 本次设计拟采用的方法 (6)第二章机械手结构设计 (7)2.1 机械手功能分析 (7)2.2 工作台机构设计 (7)2.2.1 槽轮机构简介 (7)2.2.2 槽轮机构结构特点与应用 (8)2.2.3 槽轮机构性能改进措施 (8)2.2.4 工作台机构详细设计 (9)2.2 机械手机构设计 (11)2.3.1 连杆机构简介 (12)2.3.2 连杆机构分类 (13)2.3.3 机械手机构详细设计 (13)2.3 夹紧机构设计 (18)第三章基于Pro/E的机械手装配设计 (20)3.1 Pro/E简介 (20)3.2 装配思路分析 (20)3.3 工作台机构装配 (20)3.3 机械手机构装配 (23)3.3.1 行走座与机械臂组件装配 (23)3.3.2 手指主要组件装配 (26)3.3.3 机械手机构装配 (28)3.4 夹紧机构装配 (30)3.5 机械手工作装置整体装配 (30)第四章基于Pro/E的机械手仿真分析 (33)4.1 连接设置 (33)4.1.1 接头设置 (33)4.1.2 凸轮设置 (33)4.2 电动机设置 (34)4.2.1 伺服设置 (34)4.2.2 力设置 (35)4.3 弹簧设置 (35)4.4 机构分析 (36)结论 (36)参考文献 (38)致谢 (36)第一章绪论1.1前言伴随着机电一体化在各个领域的应用,机械设备的自动控制成分显得越来越重要,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危机生命。
基于 Pro/E 多姿态挖掘机虚拟样机建模及仿真分析

基于 Pro/E 多姿态挖掘机虚拟样机建模及仿真分析张稳;罗金良;张亚龙【摘要】利用Pro/E软件设计了具有良好路况适应能力,能在复杂、恶劣条件下正常作业的挖掘机虚拟样机。
运用Pro/E软件中的机构模块对虚拟样机的行走机构中的一个分支进行运动仿真分析,获得其运动轨迹及运动包络,为机构的进一步优化奠定基础。
%Virtual excavator has been designed by Pro/E software, which can work normally in bad and complicated situation, has high quality in adapting road conditions .Using mechanism model in Pro/E to analyze one walking structure of virtual exca-vator, the movement orbits and motion envelope diagram are obtained, which can lay the foundation for the further improve-ment of walking structure.【期刊名称】《机械研究与应用》【年(卷),期】2013(000)006【总页数】3页(P63-65)【关键词】多姿态;虚拟样机;运动学分析【作者】张稳;罗金良;张亚龙【作者单位】南华大学,机械工程学院,湖南衡阳 421001;南华大学,机械工程学院,湖南衡阳 421001;南华大学,机械工程学院,湖南衡阳 421001【正文语种】中文【中图分类】TH121 前言液压挖掘机在工业与民用建筑、道路建设、水力、矿山、市政工程等土石方施工中均占有重要位置,是交通运输、能源开发、城镇建设以及国防施工等各项工程建设的重要施工设备,是国民经济建设迫切需要的装备。
Pro-E三维建模的方法与原则——李兵
Pro-E三维建模的方法与原则采用三维进行建模与设计是提高我们设计成功率与准确性,实现合理设计、科学设计、优化设计、协同设计的必要手段,也是实现PLM系统运行的前提与基础。
本文将对三维建模的方法及原则进行探讨,为三维设计提供参照和依据。
以Pro-E为例,其建模的方法与原则如下:1.三维建模立必须足于同一平台。
这句话的意思是建模必须在同一个准则下,这样建立的平台才能调用他人的模型,或者被他人调用,从而实现准确设计,协同设计。
具体来说就是按照整车坐标系的规定原则进行建模。
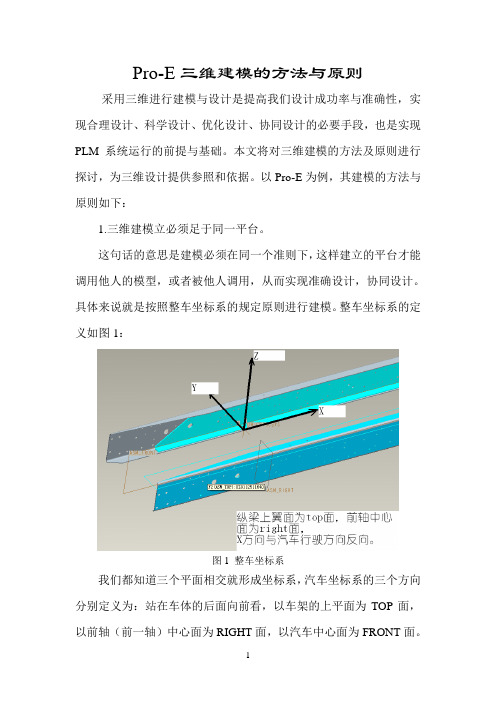
整车坐标系的定义如图1:图1 整车坐标系我们都知道三个平面相交就形成坐标系,汽车坐标系的三个方向分别定义为:站在车体的后面向前看,以车架的上平面为TOP面,以前轴(前一轴)中心面为RIGHT面,以汽车中心面为FRONT面。
三个面相交之后形成坐标系,X、Y、Z分别定义为:X方向指向汽车行驶的相反方向,Y方向指向汽车的右侧,Z方向垂直于XY平面向上,整个坐标系的定义符合右手定则。
2.建立骨架模型SKEL根据整车总布置下发的设计任务联系单,确定动力总成系统在整车坐标系中的定位,从而建立SKEL骨架模型,这是实现三维建模最为关键的一个步骤。
SKEL模型建立时主要是把设计任务联系单上的有关尺寸变为整车坐标系中的坐标,也就是把尺寸语言转化为坐标语言,这些尺寸可能能够直接使用,也可能需要计算转化,因为所有的总成不一定是按照整车坐标系建立的。
另外在转化成一定要注意方向和角度。
一个正确无误的坐标总是与方向、角度和尺寸关联系来的,否则就是一个孤立的、没有任何实际意义或者作用的坐标。
建立SKEL 骨架的过程中,必须保证每一个坐标都是有用的,而且可以对坐标用汉字或字母进行命名。
命名原则必须符合Pro-E的命名规则,不能使用连字符以及相应的标点符号等,但是可以使用下划线。
下面以冷却系统为例,介绍SKEL骨架模型的建立过程。
Step1.将整车总布置的语言转化为坐标语言。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Pro/E环境下的三维仿真技术浅析
【摘要】:个人计算机上实现三维机械零件的装配是比较困难的。
PRO/E可从工作站上移植到微机上运行, 广泛应用PRO/E具有现实的意义。
基于PRO/E 的三维仿真技术的支持,可以仿真具有真实感效果的三维机械零件装配。
【关键词】:Pro/E;珩齿刀;三维仿真
1. 三维仿真的概念
三维仿真是指利用计算机技术生成的一个逼真的,具有视、听、触、味等多种感知的虚拟环境,用户可以通过其自然技能使用各种传感设备同虚拟环境中的实体相互作用的一种技术。
三维实时仿真具体来讲,是利用沉浸式的三维显示系统和装有传感器的手套(或衣服),在伴有虚拟的声音和感触下,使受训人员沉浸在一种非常逼真的专为训练而设置的环境中,可满足多种科目训练的需要,头盔显示器是将演练者大脑与计算机创造的虚拟世界连通的输入/输出装置,主要有双目显示器和跟踪系统组成。
数据手套作为连接演练者双手和大脑与计算机创造虚拟世界的输入/输出装置,具有6个自由度的位置传感器。
这是一种使演练者不是被动地观察人工环境,而是与之交互作用的高级计算机模拟。
与其他模拟系统相比,它使演练者具有”身临其境”之感,并能”引导”操作。
”身临其境”和”引导”功能构成了虚拟现实的交互式特性,这种相互作用是三维实时仿真的本质所在。
2. PRO/E的概念
PRO/E自美国参数技术公司于1988 年推出以来,凭借上做尺寸修改时,其相关的2D 图形或3D 实体模型均自动修改。
同时,装配、制造等相关设计也会自动修改。
如此可确保数据的正确性,并避免反复修改的耗时性。
这种功能也正符合了现代产业中着强大的功能,已成为最普及的3DCAD/CAM系所谓的同步工程观念。
PRO/ E基本模块广泛用于电子、机械、模具、工业设计、汽车、自行车、航天、家电等行业。
PRO/E软件的基本模块如下:
Sketch:草图模块,用它绘制特征剖面图;
Part:零件模块,用于构件零件,其模型建立方式类似机械加工方式,而且具有参数化定义各尺寸的性质,一个Part文件中只能有一个零件;
Assembly: 装配模块,用于装配零部件,可以由现有的Assembly 文件产生工程视图,并可标注尺寸,具有双向连接特性。
Surface: 曲面模块, 用于构件各种曲面, 在PRO/ E 的软件定义为Quilt ,它
不具有实体所包含的特性(如体积、惯性矩等),其构件方式与实体方式一样。
3. PRO/E环境下的三维仿真虚拟装配
随着计算机三维技术的发展,在机械零件及机械系统设计中,零部件如何装配、加工、各零部件是否发生干涉,可视化设计等方面已能够实现,且具有了很实际的意义。
随着计算机性能价格比的不断提高,在PC 机构造出机械零部件的三维仿真模型,再进行虚拟装配及仿真已可实现,工程人员可直接在计算机里实现三维可视化的虚拟仿真装配。
虚拟装配就是利用零部件的链接关系建立装配。
PRO/E的装配模式提供了并行的、自下而上的、自上而下的产品开发方法。
所谓自下而上的设计模式,即先在零件模块中构造各个零件的三维模型,然后在装配模块中建立零部件之间的链接关系,这种链接关系的建立是通过配对条件在零部件之间建立约束关系来确定零部件在产品中的位置。
下面以PRO/E环境珩齿刀的三维仿真为例说明。
4. 珩齿刀的三维实体建模
在保持珩齿刀拓扑结构不发生重大改变的情况下,把珩齿刀特征的尺寸参数设置为变量,设计者首先根据工程需要建立变量约束关系式,由刀具设计子系统确定变量值,当把不同的变量值传递给刀具特征时,运行命令Regeneration,读入接口文件Program,就自动生成一组结构相近或相同而尺寸不同的刀具模型。
参数传递主要通过Pro/Program中的INPUT模块来实现。
在对刀具特征变量命名时,变量名要与接口文件Program中的参数名保持一致,否则不能实现特征驱动。
只要改变设计参数,即可以自动生成合乎要求的珩齿刀。
5. 机构运动仿真分析
5.1 装配连接
对一个机构的装配方法一般分为两种,即运动副装配和全约束装配。
前者是按照机构自身运动情况适当限制某些自由度,使机构中的构件在所要求的自由度方向上运动;后者属于全约束装配,机构中的构件不能相对运动,但能满足机构的相关技术分析,例如机构干涉校验、机构碰撞检测等。
对于珩齿加工机构, 装配时由于要保证珩齿刀和被加工齿轮的正确啮合,需要做很多技术处理工作,例如要为运动构件建立骨架模型,这样只需调整骨架模型就可以调形。
5.2 机构运动仿真分析
应用Pro/E的机构设计扩展模块实现对设计的模拟仿真校验。
以珩齿刀作为主动体为其施加驱动,同时设置零件运动的各项参数(电机的起止时间、运动振幅周期及运动规律),并在珩齿刀和被加工齿轮之间建立齿轮运动副。
随后即可进行机构模拟。
6. 结束语
通过PRO/ E 提供的零件图模块可以自动绘制与机械零件的三维模型;利用PRO/ E 的装配模块,,可以装配出机械系统。
采用这种机械装配方法,可以在产品的设计阶段直接检查机械系统各个零部件在空间的装配情况和干涉情况,进一步实现可视化的设计和分析, 进行实现并行工程具有一定的意义。
参考文献
[1] 任敬心, 刘洪忠, 张应昌. 齿轮工程学[M]. 北京:国防工业出版社, 1985.
[2] 祝凌云, 李斌. Pro/Enginer运动仿真和有限元分析在舍入误差[M]. 北京:人民邮电出版社, 2007.
[3] 吴继泽, 王统. 齿根过渡曲线与齿根应力[M]. 北京:国防工业出版社, 1989.
[4] 彭万波, 张云静, 张然, 等. 1PRO/ E2001 实例精解[M]. 北京:清华大学出版社, 2002.
[5] 张益三, 等. PRO/ E入门基础--功能剖析[M]. 北京:机械工业出版社, 2001.。