2-2 金属热态下的塑性变形
材料成形技术基础第3章

材料成形技术基础
由此可见,粗晶粒金属的变形由一个晶粒 转移到另一个晶粒会容易一些,而细晶粒 则需要在更大的外力作用下才能使相邻晶 粒发生塑性变形。
材料成形技术基础
细晶粒的塑性比粗晶粒好
在一定体积内,细晶粒金属的晶粒数目比粗晶粒 金属的多,因而,塑性变形时,位向有利的晶粒 数较多,变形能够均匀分散到各个晶粒上。
材料成形技术基础
应力偏张量:应力偏张量不会引起物体的体积变
化。再者,应力偏张量中的剪应力成分与整个应 力张量中的剪应力成分完全一致,因此应力偏张 量完全包含了应力张量作用下的形状变化因素, 也就是说,物体是否发生塑性变化只与应力偏张 量有关。
3.晶粒与晶粒之间和晶粒内部与晶界附近区域之 间变形的不均匀性。
材料ቤተ መጻሕፍቲ ባይዱ形技术基础
晶粒越小,金属的屈服极限越大
滑移由一个晶粒转移到另一个晶粒,主要取决于晶 粒晶界附近位错塞积群所产生的应力场能否激发相 邻晶粒中的位错源也开动起来,以进行协调性的次 滑移,而位错塞积群所产生的应力场的强弱与塞积 的位错数量相关,数量越大,应力场越大。
材料成形技术基础
5.应力球张量和应力偏张量
称为平均应力,又称为静水压力
材料成形技术基础
应力球张量:当质点处于球应力状态下,过该
点的任意方向均为主方向,且各方向的主应力相 等,而任意切面上的剪应力均为零。所以球形应 力张量的作用与静水应力相同,它只能引起物体 的体积变化,而不能使物体发生形状变化。
材料成形技术基础
4.主剪应力和最大剪应力
物体的塑性变形是由剪应力产生的,当 剪应力达到某个临界值时,物体便由弹性 状态进入塑性(屈服)状态。通过点的应力 状态可求出剪应力的极值。使剪应力取极 限值的平面为主剪应力平面。它们为与某 一主平面垂直,而与另两个主平面成450交 角的平面。主剪应力平面上的剪应力称为 主剪应力。
金属的塑性变形

滑移
滑移:在切应力作用下,晶体的一部分相对于另一部分沿着一
定的晶面(滑移面)和晶向(滑移方向)产生相对位移, 且不破坏晶体内部原子排列规律性的塑变方式。
τ
τ
a)未变形
bτ )弹性变形
τc)弹塑性变形
单晶体滑移变形示意图
d)塑性变形
孪生
孪生:晶体内的一部分原子(红色)相对另一部分原子沿某个
晶面转动,使未转动部分与转动部分的原子排列成镜面对称关系。
一、金属的可锻性(塑性加工性能)
定义:在锻造过程中,金属通过塑性加工而不开裂, 并获得合格零件的能力。 衡量指标:金属的塑性和变形抗力 塑性越高、变形抗力越低,可锻性越好。
二、影响金属可锻性的因素:
三个主要因素:金属的本质、加工条件、应力状态 1、金属的本质(内在因素): ①化学成分
➢ 碳钢:钢的含碳量越低,可锻性越好; ➢ 合金钢:合金元素含量越高,可锻性越差; ➢ 纯金属的可锻性优于合金。 ②金属组织
冷变形过程缺点:
①冷变形过程的加工硬化使金属的塑性变差,给进一步塑性变 形带来困难。 ②对加工坯料要求其表面干净、无氧化皮、平整。 ③加工硬化使金属变形处电阻升高,耐蚀性降低。
五、纤维组织及其利用
纤维组织(热加工流线):
塑性加工中,金属的晶粒形状和晶界分布的杂质沿变形方 向被拉长,呈纤维状。纤维组织不能热处理消除,只能通过锻 压改变其形状和方向。
纯金属或单相固溶体(奥氏体)的可锻性优于多相组织; 均匀细晶的可锻性优于粗晶组织和铸态柱状晶; 钢中存在网状二次渗碳体时可锻性下降。
影响金属可锻性的因素:
2、加工条件:
①变形温度 温度越高,金属塑性提高,
变形抗力降低,可锻性提高。
加热温度过高,产生缺陷: 过热:晶粒长大,使综合机械性能下降; 过烧:晶粒边界氧化或熔化 ,一击即碎; 脱碳:碳与环境气体反应,使表层含碳量减少; 严重氧化:表层与 氧反应,生成氧化物。
第二章 金属材料的塑性变形与性能

9
根据载荷作用性质不同:
a)拉深载荷 --拉力 b)压缩载荷 —压力 c)弯曲载荷 --弯力 d)剪切载荷--剪切力 e)扭转载荷--扭转力
10
2.内力 (1)定义 工件或材料在受到外部载荷作用时,为使其不变形,在 材料内部产生的一种与外力相对抗的力。 (2)大小 内力大小与外力相等。 (3)注意 内力和外力不同于作用力和反作用力。
2
§1.金属材料的损坏与塑性变形
1.常见损坏形式
a)变形
零件在外力作用下形状和尺寸所发生的变化。 (包括:弹性变形和塑性的现象。
c)磨损
因摩擦使得零件形状、尺寸和表面质量发生变化的现象。
3
2.常见塑性变形形式 1)轧制 (板材、线材、棒材、型材、管材)
28
2)应用范围 主要用于:测定铸铁、有色金属及退火、正火、 调质处理后的各种软钢或硬度较低的 材料。 3)优、缺点 优点:压痕直径较大,能比较正确反映材料的平均 性能;适合对毛坯及半成品测定。 缺点:操作时间比较长,不适宜测定硬度高的材料; 压痕较大不适合对成品及薄壁零件的测定。
29
2.洛氏硬度(HR)——生产上应用较广泛 1)定义 采用金刚石压头直接测量压痕深度来表示材料的硬度值。 2)表示方法
11
3.应力 (1)定义 单位面积上所受到的力。 (2)计算公式 σ= F/ S( MPa/mm2 ) 式中: σ——应力; F ——外力; S ——横截面面积。
12
二、金属的变形 金属在外力作用下的变形三阶段: 弹性变形 弹-塑性变形 断裂。 1.特点 弹性变形: 金属弹性变形后其组织和性能不发生变化。 塑性变形: 金属经塑性变形后其组织和性能将发生变化。 2.变形原理 金属在外力作用下,发生塑性变形是由于晶体内部 缺陷—位错运动的结果,宏观表现为外形和尺寸变化。
第三章 金属塑性变形的物理基础
(1)塑性的基本概念
什么是塑性? 塑性是金属在外力作用下产生永久变形 而不破坏其完整性的能力。
塑性与柔软性的区别是什么? 塑性反映材料产生永久变形的能力。 柔软性反映材料抵抗变形的能力。
塑性与柔软性的对立统一
铅---------------塑性好,变形抗力小
不锈钢--------塑性好,但变形抗力高 白口铸铁----塑性差,变形抗力高
塑性指标的测量方法
拉伸试验法 压缩试验法 扭转试验法 轧制模拟试验法
拉伸试验法
Lh L0 100%
L0 F0 Fh 100%
F0
式中:L0——拉伸试样原始标距长度; Lh——拉伸试样破断后标距间的长度; F0——拉伸试样原始断面积; Fh——拉伸试样破断处的断面积
%
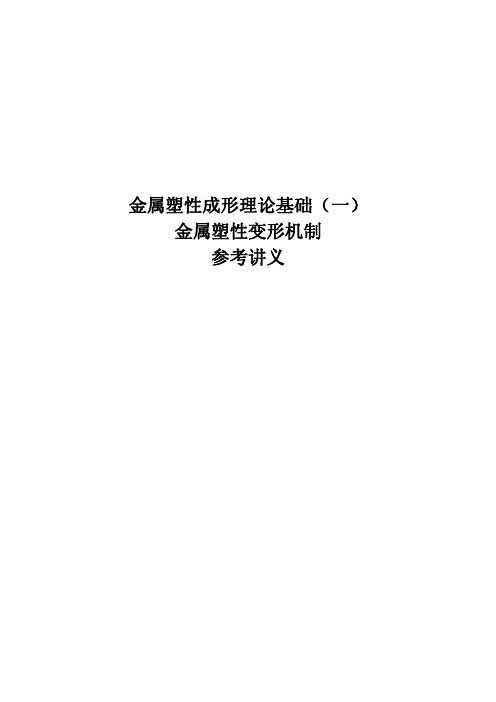
晶粒5 晶粒4 晶粒3
晶粒2
晶粒1
位置,mm
图5-6 多晶铝的几个晶粒各处的应变量。 垂直虚线是晶界,线上的数字为总变形量
四、合金的塑性变形
单相固溶体合金的变形 多相合金的变形
§3. 2 金属塑性加工中组织和性能变化 的基本规律
一、冷塑性变形时金属组织和性能的变化 二、热塑性变形时金属组织和性能的变化
2200
N/mm2
图4-6 正压力对摩擦系数的影响
0.5
μ
0.4
0.3
0.4
0.2 0.2
0.1
0
℃
200
400
600
800
图4-7 温度对钢的摩擦系数的影响
0
400
600
800 ℃
图4-8 温度对铜的摩擦系数的影响
测定摩擦系数的方法
夹钳轧制法 楔形件压缩法 塑性加工常用摩擦系数 圆环镦粗法
金属的塑性变形

在某些特定条件下,金属晶体的一部分相对于另一部分沿一定轴进 行镜像对称的移动,形成孪晶。
扩散机制
金属在高温下,原子扩散能力增强,通过原子间的相互移动实现塑 性变形。
应力-应变关系与曲线分析
应力-应变关系
描述金属在塑性变形过程中所受应力 与产生的应变之间的关系。应力是单 位面积上的内力,应变是物体形状或 体积的改变程度。
热处理工艺改进
退火处理
通过退火处理可以消除金属材料内部的残余应力,改善其组织结 构和力学性能,从而提高其塑性变形能力。
正火处理
正火处理可以使金属材料获得细化的晶粒和均匀的组织,提高其 强度和塑性。
回火处理
回火处理可以消除淬火应力,稳定金属材料的组织和性能,进一 步提高其塑性变形能力。
微观组织调控手段
热处理工艺对塑性影响
01
退火处理
退火处理可以消除金属内部的残余应力,改善组织结构,提高其塑性。
例如,冷加工后的金属经过退火处理,可以恢复其塑性和韧性。
02
正火处理
正火处理可以使金属获得细化的晶粒和均匀的组织,从而提高其塑性和
韧性。正火处理常用于改善中碳钢的切削性能和力学性能。
03
淬火处理
淬火处理可以使金属获得马氏体组织,提高其硬度和强度,但会降低其
金属的塑性变形
目 录
• 塑性变形基本概念与原理 • 金属塑性变形过程中的组织结构演变 • 影响金属塑性变形能力因素探讨 • 金属塑性变形实验方法及技术应用 • 提高金属材料塑性变形能力策略探讨 • 总结:金属塑性变形研究意义与未来发展趋势
塑性变形基本概念与
01
原理
塑性变形定义及特点
塑性变形定义
利用电子显微镜的高分辨率和 高放大倍数,观察金属的微观 组织和结构缺陷,如位错、层 错、孪晶等。这些信息有助于 深入了解金属的塑性变形机制 和强化机制。
第二章 金属塑性变形的物理基础
26
锻造温度区间的制定
27
2、锻合内部缺陷 3、打碎并改善碳化物和非金属夹杂物在钢 中的分布 4、形成纤维组织 5、改善偏析
28
塑性变形过程中晶粒的变化
29
第三节 金属的超塑性变形
一、超塑性的概念和种类 概念:金属和合金具有的超常的均匀变形 能力。
大伸长率、无颈缩、低流动应力、易成形、无加工硬化
另一个取向,故晶界处原子排列处于过渡状态。
4、晶界不同于晶内性质:
3
一、变形机理
晶内变形 1、滑移 2、孪生 晶间变形 晶粒之间的相互转动和滑动 注意: 晶间变形的情况受温度的影响
4
1、滑移面和滑移方向的确定
确定滑移面:原子排 列密度最大的晶面 确定滑移方向:原子 排列密度最大的方向
5
金属的主要滑移方向、滑移面、滑移系
种类:
细晶超塑性:在一定的恒温下,在应变速率和晶粒度都满 足要求的条件下所呈现出的超塑性。 相变超塑性:具有相变或同素异构转变的金属,在其转变 温度附近以一定的频率反复加热、冷却。在外力的作用下 所呈现出的超塑性。
30
二、细晶超塑性变形的力学特征
无加工硬化
31
三、影响细晶超塑性的主要因素
应变速率
20
21
二、性能的变化 (力学性能) 加工硬化 成因:位错交互作用,难以运动 应用:强化(奥氏体钢) 避免:多次塑性加工中加入退火工序
22
第二节 金属热态下的塑性变形
热塑性变形:再结晶温度以上进行的塑性 变形 一、塑性变形时的软化过程 1、动态回复、动态再结晶 2、静态回复、静态再结晶、亚动钢中的碳和杂质元素的影响 碳 磷 硫 氮 氢 氧
37
2、合金元素对钢的塑性的影响 合金元素的加入,会使钢的塑性降低、变 形抗力提高 原因见课本p43
金属塑性成形原理---第二章_金属塑性变形的物理基础
位错的攀移
❖ 螺型位错无攀移
❖ 正攀移——正刃型位错位错线上移
负刃型位错位错线下移
编辑课件
位错的交割
❖ 两根刃型位错线都在各自的滑移面上移动,
则在相遇后交截分别形成各界,形成割阶后
仍分别在各自的平面内运动。
❖ 刃型位错和螺型位错交割时,在各自的位错
线上形成刃型割阶,位错线也能继续滑移。
❖ 螺型位错和螺型位错交割时,相交后形成的
❖ 假设:理想晶体两排原子相距为a,同排原子间距
为b。原子在平衡位置时,能量处于最低的位置。
在外力τ作用下,原子偏离平衡位置时,能量上升,
原子能量随位置的变化为一余弦函数。
❖ 通过计算晶体的临界剪切应力,并与实际的临界
剪切应力进行比较,人们发现,理论计算的剪切
强度比实验所得到的剪切强度要高一千倍以上。
编辑课件
典型的晶胞结构
编辑课件
典型的晶胞结构
编辑课件
三种晶胞的晶格结构
编辑课件
一、塑性变形机理
实际金属的晶体结构
❖ 单晶体:各方向上的原子密度不同——各向
异性
❖ 多晶体:晶粒方向性互相抵消——各向同性
❖ 塑性成形所用的金属材料绝大多数为多晶
体,其变形过程比单晶体复杂的多。
编辑课件
多晶体塑性变形的分类
加工中,会使变形力显著增
加,对成形工件和模具都有
III.抛物线硬化阶段:
一定的损害作用;但利用金
与位错的交滑移过程有关,
θ3
随应变增加而降低,应力应变
属加工硬化的性质,对材料
曲线变为抛物线。
进行预处理,会使其力学性
能提高
编辑课件
2.2 金属热态下的塑性变形
二篇金属的塑性成形工艺
<图6-10)最小阻力定律示意图
在镦粗中,此定律也称——最小周边法则
二、塑性变形前后体积不变的假设
弹性变形——考虑体积变化
塑性变形——假设体积不变<由于金属材料连续,且致密,体积变化很微小,可忽略)
此假设+最小阻力定律——成形时金属流动模型
落料——被分离的部分为成品,而周边是废料
冲孔——被分离的部分为废料,而周边是成品
如:平面垫圈:制取外形——落料
制取内孔——冲孔
1.冲裁变形过程
冲裁件质量、冲裁模结构与冲裁时板料变形过程关系密切,
其过程分三个阶段
<1)弹性变形阶段<图8-1)
冲头接触板料后,继续向下运动的初始阶段,使板料产生弹性压缩、拉伸与弯曲等变形,板料中应力迅速增大。此时,凸模下的材料略有弯曲,凹模上的材料则向上翘,间隙↑→弯曲、上翘↑SixE2yXPq5
§6-1塑性变形理论及假设
一、最小阻力定律
金属塑性成形问题实质,金属塑性流动,影响金属流动的因素十分复杂<定量很困难)。应用最小阻力定律——定性分析<质点流动方向)p1EanqFDPw
最小阻力定律——受外力作用,金属发生塑性变形时,如果金属颗粒在几个方向上都可移动,那么金属颗粒就沿着阻力最小的方向移动。DXDiTa9E3d
[注]按变形的模膛数:单膛锻模<如齿轮坯)
多膛锻模<图7-7)
§7-3锤上模锻成形工艺设计
模锻生产的工艺规程包括:制订锻件图、计算坯料尺寸、确定模锻工步<选模膛)、选择设备及安排修整工序等。
最主要是锻件图的制定和模锻工步的确定
一、模锻锻件图的制定
金属塑性变形机制-讲义
金属塑性成形理论基础(一)金属塑性变形机制参考讲义前言金属塑性加工是利用金属的塑性,在外力的作用下,通过模具(或工具)使简单形状的坯料成形为所需形状和尺寸的工件(或毛坯)的技术。
它也被称之为塑性成形或压力加工。
金属塑性加工方法主要包括锻造、冲压、轧制、拉拔、挤压等几种类型。
为何采用塑性成形技术?⏹金属经过塑性成形后能改善其组织结构和力学性能。
铸造组织经过热塑性变形后由于金属的变形和再结晶,会使原来的粗大枝晶和柱状晶粒变为晶粒较细、大小均匀的等轴再结晶组织,使钢锭内原有的偏析、缩松、气孔、夹渣等压实和焊合,其组织变得更加紧密,提高了金属的塑性和力学性能。
因此铸件的力学性能低于同材质的锻件的力学性能。
⏹塑性成形能保证金属纤维组织的连续性,使锻件的纤维组织与锻件外形保持一致,金属流线完整,可保证零件具有良好的力学性能与长的使用寿命。
什么是塑性变形?当外力增大到使金属的内应力超过该金属的屈服极限以后,金属就会产生变形。
当外力停止作用后,金属的变形并不消失。
这种变形称为塑性变形。
(当外力作用在金属上时,如受拉,金属内的原子间距变大,如果这种变化是弹性范围内的,当外力去除后,原子还能恢复到原来的状态;如果外力较大,这种变化就达到了塑性阶段了,当外力去除之后,有一部分变化就不能恢复了,金属就发生了塑性变形。
作为一种极限,当外力大到一定程度,原子间的结合力被打破,那么金属就断了。
)塑性是指金属材料在载荷外力的作用下,产生永久变形(塑性变形)而不被破坏的能力。
塑性不仅与材料本身的性质有关,还与变形有方式和变形条件有关。
材料的塑性不是固定不变的,不同的材料在同一变形条件下会有不同的塑性,而同一材料,在不同的变形条件下,会表现不同的塑性。
塑性是反映金属的变形能力,是金属的一咱重要的加工性能。
塑性好的材料可以顺利地进行某些成型工艺加工,如冲压、冷弯、冷拔、校直等。
金属材料通过冶炼、铸造,获得铸锭后,可通过塑性加工的方法获得具有一定形状、尺寸和力学性能的型材、板材、管材或线材,以及零件毛坯或零件。
第二章_金属塑性变形的物理基础

超塑性的特点
超塑性变形的一般特点: 1、大伸长率 2、无缩颈 3、低流动应力 4、易成形
采用超塑性成形工艺,可获得形状复杂和尺寸精确的锻件, 而变形力大大降低 。
超塑性成形实例
b 弥散强化
位错切过第二相粒子(表面能、错排能、 粒子阻碍位错运动)
四 塑性变形对金属组织和性能的影响
1 对组织结构的影响 (1) 形成纤维组织
晶粒拉长 杂质呈细带状或链状分布
H62黄铜挤压的带状组织
(2) 亚结构
变形量增大 位错缠结 位错胞 (大量位错缠结在胞壁,胞内位错密度低)
(3) 形变织构
四 塑性变形对金属组织和性能的影响
2 对力学性能的影响(加工硬化) (1)加工硬化(形变强化、冷作强化):随变形 量的增加,材料的强度、硬度升高而塑韧性下降 的现象。
2 对力学性能的影响(加工硬化)
强化金属的重要途径
利 提高材料使用安全性
(2)利弊
材料加工成型的保证
弊 变形阻力提高,动力消耗增大
孪生的特点
(1)孪生是一部分晶体沿孪晶面相对于另一部分晶体 作切变,切变时原子移动的距离是孪生方向原子间距的 分数倍;孪生是部分位错运动的结果;孪晶面两侧晶体 的位向不同,呈镜面对称;孪生是一种均匀的切变。
孪生的特点
(2)孪晶的萌生一般需 要较大的应力,但随后长 大所需的应力较小,其拉 伸曲线呈锯齿状。孪晶核 心大多是在晶体局部高应 力区形成。变形孪晶一般 呈片状。变形孪晶经常以 爆发方式形成,生成速率 较快。
位错密度越高,金属的强度、硬度越高。
S:位错线长度,V:体积,ρ:位错密度
02第二章金属塑性变形的物理基础

Fe-C合金(钢铁)
Fe-0.8C
-
Fe-(1.3,1.6,1.9)C -
GCr15
0.42
Fe-1.5C-1.5Cr
-
Fe-1.37C-1.04Mn0.12V
-
AISI01(0.8C)
0.5
52160
0.6
高级合金
901
-
Ti-6Al-4V
0.85
210~250 470 540 1200 817 1200 1220
合金成分(Wt%) 共析合金 Zn-22Al 共晶合金
Zn-5Al
m 延伸率δ(%) 变形温度(℃)
0.5
>1500
200~300
0.48~ 0.5
300
200~360
Al-33Cu Al-Si Cu-Ag
Mg-33Al Sn-38Pb Bi-44Sn
Pb-Cd
0.9 - 0.53 0.85 0.59 - 0.35
一、概念和种类
(一)概念 具有超常的均匀变形能力,伸长率达到百分之几 百~百分之几千。
伸长率:δ>200%;
应变速率敏感性指数:m>0.3;
抗缩颈能力大。
特点:大伸长率、低流动应力、易成形。
(二)种类
1.细晶超塑性(结构超塑性或恒温超塑性) 条件:a.晶粒超细化和等轴长(<10um);
b.恒温条件的下限温度0.5Tm
Al-Zn-Ca Cu基合金 Cu-9.5Al-4Fe Cu-40Zn
0.5 0.43 0.9 0.9
- 0.72 -
0.64 0.64
1800~2000 1310 100 1550 >1000 >600 267
金属塑性变形的物理基础

第二节金属热态下的塑性变形
01
02
03
04
第二节金属热态下的塑性变形 1.热塑性变形时软化过程
23% Option 1
30% Option 2
热塑性变形时软化过程
静态回复 在较低的温度下、或在较早阶段发生转变的过程称为静态回复。它是变形后的金属自发地向自由能降低的方向转变的过程。
静态再结晶 在再结晶温度以上,金属原子有更大的活动能力,会在原变形金属中重新形成新的无畸变等轴晶,并最终取代冷变形组织,此过程称为金属的静态再结晶。
01
02
03
04
05
06
3.合金的塑性变形
(一) 单相固溶体的塑性变形 2 固溶强化 (3)屈服和应变时效 现象:上下屈服点、屈服延伸(吕德斯带扩展)。 预变形和时效的影响:去载后立即加载不出现屈服现象;去载后放置一段时间或200℃加热后再加载出现屈服。这种现象叫做应变时效。 原因:柯氏气团的存在、破坏和重新形成。
在孪生变形时,所有平行于孪生面的原子平面都朝着一个方向移动。每一晶面移动距离的大小与它距孪生面的距离成正比。每一晶面与相邻晶面的相对移动恒等于点阵常数的若干分之一。
01
晶体以何种方式变形,取决于那张变形需要的切应力低。
02
常温下滑移切应力低于孪生,很低温度下,孪生低于滑移。
03
变形速度的增加可促使晶体的孪生化,如高速冲击。
热轧和热挤时,动、静态回复和再结晶的示意图。
图4-10 动、静回复和再结晶示意
热塑性变形机理
第二节金属热态下的塑性变形 2.热塑性变形的机理 变形机理主要有:晶内滑移、晶内孪生、晶界滑移和扩散蠕变。 一般来说,晶内滑移是最主要和常见的;孪生多在高温变形时发生,但对刘芳晶系金属,这种机理起重要作用。晶界滑移和扩散蠕变只在高温变形时才发挥作用。 (1)晶内滑移 热变形的主要机理仍然是晶内滑移。高温时原子间距加大,热振动和扩散速度增加,位错滑移、攀移、交滑移及节点脱锚比低温容易;滑移系增多,滑移灵便性提高,各晶粒之间变形更加协调;晶界对位错运动阻碍作用减弱。
金属的塑性变形

五、金属变形程度
常用锻造比表示 Y=F0/F F0表示变形前面积 F表示变形后面积
钢锭Y=2-3 合金钢Y=3-4 高速钢Y=5-12
六、冷、热变形比较
热变形特点:
(1)均匀、细化晶粒 (2)消除加工硬化
(3)高温、塑性好 (4)氧化严重
(5)精度差
(6)设备贵,维修费高
冷变形特点:
(1)不加热
(2)精度、表面质量好
单晶体的滑移
多晶体
二、冷变形后的金属组织与性能 塑Байду номын сангаас变形后:
(1)产生纤维组织,引起各向异性 (2)晶格扭曲 (3)晶粒间产生碎晶 使金属的强度、硬度增加,塑性、韧性 下降,即加工硬化。增加滑移阻力,使金 属形变强化
1.纤维组织 2.加工硬化 3.残余内应力
2.加工硬化(形变硬化、冷作硬化)
(3)硬度、强度高 (4)材料有方向性
(5)设备贵,存在残余应力,易产生裂纹。
§1-2 锻前加热与锻后冷却
一、锻造前加热目的及方法
目的: 提高金属塑性,降低变形抗力.易于锻造成形 并获得好的锻后组织.
按加热热源不同可分为:
1.火焰加热,燃料来源方便,炉子修造简单,加热费 用低适应范围广。用于各种大、中、小型坯料的加热。 劳动条件差,加热速度慢,加热质量难于控制。
§1-1 金属的塑性变形
压力加工:在外力作用下,使金属产生塑性变形,获得一定几 何形状、尺寸和力学性能毛坯,原材料或零件的加工方法。压 力加工有自由锻、模锻、板料冲压、轧制、挤压、拉拔等。
一、塑性变形实质 1、单晶体塑性变形 (1)当无外力,晶格正常排列。 (2)外力作用使原子离开平衡位置,晶格变形。 (3)当剪应力足够大,沿晶面移动一个或几个原子距离。 2、多晶体塑性变形 多晶体是多个位向不同变形总和。特点: (1)变形过程复杂。 (2)变形抗力比单晶体大的多。
金属材料的塑性变形

整理课件
3
2.孪生
在切应力作用下,晶体的一部分沿一定的晶面(孪晶面)和晶 向(挛晶方向)相对于另一部分所发生的切变称为孪生。
孪生与滑移的区别是: 1)孪生所需要的临界切应力比滑移大得多,变形速度极快。 2)发生切变、位向改变的这一部分晶体称为孪晶带或孪晶。 3)孪晶中每层原子沿孪生方向的相对位移距离是原子间距的分数。
⑶形变织构的产生 当变形量很大(70%以上)时,会使绝大部分 晶粒的某一位向与外力方向趋于一致,形成特殊的择优取向。择优取
向的结果形成了具有明显方向性的组织,称为织构。
整理课件
9
3.2.3 塑性变形产生的残余应力
残余应力: 金属表层与心部的变形量不同会形成表层与心部之间的
宏观内应力; 晶粒彼此之间或晶内不同区域之间的变形不均匀会形成
⑴纤维组织形成 金属在外力作用下发生塑性变形时,随着变形 量的增加晶粒形状发生变化,沿变形方向被拉长或压扁。
当拉伸变形量很大时,晶粒变成细条状,金属中的夹杂物也被 拉长,形成所谓纤维组织。
变形前后晶粒形状变化示意图
整理课件
8
⑵亚结构形成 金属经大量的塑性变形后,大量的位错聚集在 局部地区,将原晶粒分割成许多位向略有差异的小晶块,即亚晶粒。
整理课件
4
3.1.2 多晶体的塑性变形
1.晶粒取向对塑性变形的影响
在多晶体中,各个晶粒内原 子排列的位向不一致,这样 不同晶粒的滑移系的取向就 会不同。
作用在不同晶粒滑移系 上的分切应力会有差别,分 切应力最大的那些晶粒最先 开始滑移。多晶体金属的塑 性变形将会在不同晶粒中逐 批发生.
塑性变形知识点总结
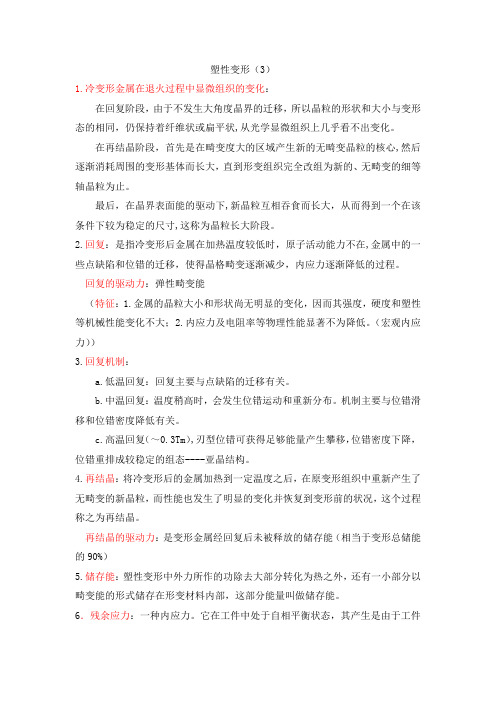
塑性变形(3)1.冷变形金属在退火过程中显微组织的变化:在回复阶段,由于不发生大角度晶界的迁移,所以晶粒的形状和大小与变形态的相同,仍保持着纤维状或扁平状,从光学显微组织上几乎看不出变化。
在再结晶阶段,首先是在畸变度大的区域产生新的无畸变晶粒的核心,然后逐渐消耗周围的变形基体而长大,直到形变组织完全改组为新的、无畸变的细等轴晶粒为止。
最后,在晶界表面能的驱动下,新晶粒互相吞食而长大,从而得到一个在该条件下较为稳定的尺寸,这称为晶粒长大阶段。
2.回复:是指冷变形后金属在加热温度较低时,原子活动能力不在,金属中的一些点缺陷和位错的迁移,使得晶格畸变逐渐减少,内应力逐渐降低的过程。
回复的驱动力:弹性畸变能(特征:1.金属的晶粒大小和形状尚无明显的变化,因而其强度,硬度和塑性等机械性能变化不大;2.内应力及电阻率等物理性能显著不为降低。
(宏观内应力))3.回复机制:a.低温回复:回复主要与点缺陷的迁移有关。
b.中温回复:温度稍高时,会发生位错运动和重新分布。
机制主要与位错滑移和位错密度降低有关。
c.高温回复(~0.3Tm),刃型位错可获得足够能量产生攀移,位错密度下降,位错重排成较稳定的组态----亚晶结构。
4.再结晶:将冷变形后的金属加热到一定温度之后,在原变形组织中重新产生了无畸变的新晶粒,而性能也发生了明显的变化并恢复到变形前的状况,这个过程称之为再结晶。
再结晶的驱动力:是变形金属经回复后未被释放的储存能(相当于变形总储能的90%)5.储存能:塑性变形中外力所作的功除去大部分转化为热之外,还有一小部分以畸变能的形式储存在形变材料内部,这部分能量叫做储存能。
6.残余应力:一种内应力。
它在工件中处于自相平衡状态,其产生是由于工件内部各区域变形不均匀性,以及相互间的牵制作用所致。
7.再结晶温度:冷变形金属开始进行再结晶的最低温度。
》》通常,把对应于再结晶后得到特别粗大晶粒的变形程度称为“临界变形度”,一般金属的临界变形度约为2%~10%。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图2-25冷变形金属加热时组织和性能的变化
金属塑性成形原理
3.静态回复机理
原子只在晶内作短程扩散,使点缺陷和位错发生运动,改变了晶体缺陷的 数量和分布状态。
金属的强度、硬度有所下降,塑性、韧性有所提高;但显微组织没有发生 明显的变化。
低温回复(0.1~0.3Tm)时,回复的主要机理是点缺陷运动和互相结合,使 点缺陷的浓度下降。
金属塑性成形原理
一、热塑性变形时金属的软化过程
热塑性变形时金属的软化过程比较复杂,它与变形温度、应变速率、变形 程度和金属本身的性质有关,主要有静态回复、静态再结晶、动态回复、动态 再结晶和亚动态再结晶等。
动态回复与动态再结晶:一般将热变形过程中,在应力状态作用下所发生 的回复与再结晶过程称为动态回复与动态再结晶。
金属塑性成形原理
综合上述可知,在整个回复阶段: ✓点缺陷减少,位错密度有所下降,位错分布形态经过重新调整和组合而处 于低能态; ✓位错发团变薄、网络更清晰,亚晶增大;但晶粒形状没有发生变化; ✓整个金属的晶格畸变程度和内应力大为减小,其性能也发生相应的变化。 ✓金属的物理性能有较大恢复,如密度增加、电阻率下降,而力学性能没有 明显变化。
金属塑性成形原理
2)性能变化
回复阶段:强度、硬度略有下降,塑性略 有提高。内应力明显下降。
再结晶阶段:强度、硬度明显下降,塑性 明显提高。内应力可完全消除。
晶粒长大阶段:强度、硬度继续下降,塑 性继续提高,粗化严重时下降。
电阻在回复阶段可明显下降, 密度在回复阶段可明显增加。
根本原因:缺陷密度降低
中温回复(0.3~0.5Tm)时,除了点缺陷的运动,还出现位错发团(晶体位 错的高密度区出现的位错线纷乱纠缠的现象)内部位错重新组合和调整、位错运 动和异号位错互毁,导致位错发团厚度变薄,位错网络清晰,晶界位错密度下降, 亚晶缓慢长大。
高温回复(T>0.变能降低。高温回复的主要机理是“多边形化”。
再结晶:冷变形金属被加热到适当温度时,在变形组织内部新的无畸变的等轴晶粒 逐渐取代变形晶粒,而使形变强化效应完全消除的过程。
金属塑性成形原理
2、冷变形金属加热过程中显微组织和性能的变化
1)显微组织变化 回复阶段:显微组织仍为纤维状,无可见变化; 再结晶阶段:变形晶粒通过形核长大,逐渐转变为新的无畸变的等轴晶粒。 晶粒长大阶段:晶界移动、晶粒粗化,达到相对稳定的形状和尺寸。
低层错能金属
变形率90% 图2-24 动、静态回复和再结晶示意图
金属塑性成形原理
(一)静态回复和再结晶
金属冷变形后,组织、结构和性能都发生了复杂的变化。变形引起加工硬 化,晶体缺陷增多,金属畸变内能增加,原子处于不稳定的高自由能状态,具 有向低自由能状态转变的趋势。当加热升温时,原子获得足够的扩散能力,变 形后的金属自发地向低自由能状态转变。这一转变过程称为回复和再结晶。
静态回复与静态再结晶:金属冷塑性变形后产生了加工硬化,如果将它加 热,则会发生相反的变化,也就是产生软化,即发生回复和再结晶。通常把这 种回复和再结晶称为静态回复和静态再结晶。
热变形间歇期间或热变形后,利用金属的高温余热产生的回复和再结晶也称 为静态回复和静态再结晶。
变形率50%
高层错能金属
金属塑性成形原理
金属塑性成形原理
2.2 金属热态下的塑性变形
金属塑性成形原理
内容提纲
一、热塑性变形时的软化过程 二、热塑性变形机理 三、双相合金热塑性变形的特点 四、热塑性变形对金属组织和性能的影响
金属塑性成形原理
第二节 金属热态下的塑性变形
热塑性变形(又称热加工):是指变形金属在再结晶温度以上进行的塑 性变形。
去应力退火是回复在工业生产中的应用之一。回复后金属基本上保持加 工硬化状态。但内应力降低,从而避免了变形或开裂,并改善工件的耐蚀性。
从回复机制可以理解,回复过程中电阻率的下降主要是由于过量空位的 减少和位错应变能的降低;内应力的降低主要是由于晶体内弹性应变的基本 消除;硬度及强度下降不多是由于位错密度下降不多,亚晶还较细小之故。
热加工的不足之处: (1)对薄或细的轧件,由于散热较快,在生产中保持热加工的温度条件比较困难。因此, 目前对生产薄的或细的金属材料来讲,一般仍采用冷加工(如冷轧、冷拉)的方法。 (2)热加工后轧件的表面不如冷加工生产的尺寸精确和光洁。因为在加热时,由于轧件 表面生成氧化皮和冷却时收缩的不均匀。 (3)热加工后产品的组织及性能不如冷加工时均匀。因为热加工结束时,工件各处的温 度难于均匀一致。
热塑性变形目的: 一是成形;二是改善材料组织与性能。
金属塑性成形原理
热加工的优点: (1)金属在热加工变形时,变形抗力较低,消耗能量较少。 (2)金属在热加工变形时,其塑性升高,产生断裂的倾向性减小。 (3)与冷加工相比较,热加工变形一般不易产生织构。 (4)在生产过程中,不需要像冷加工那样的中间退火,从而可使生产工序简化,生产效 率提高。 (5)热加工变形可引起组织性能的变化,以满足对产品某些组织与性能的要求。
金属塑性成形原理
多边形化:位错通过滑移、攀移、交滑移等多种运动形式,使滑移面上的位错由 水平塞积逐渐变为垂直排列,形成所谓位错壁。于是晶体即被位错壁分隔成许多 位向差小、而原子排列基本规则的小晶块。这些小晶块的形状近似一个多边形, 故将此过程称为多边形化。
多边形化的结果是形成亚晶,金属应变能降低、处于更稳定状态
实际中的热塑性加工中,为了保证再结晶过程的顺利完成以及操作上的需要 等,其变形温度通常远比再结晶温度高。一般在热变形时金属所处温度范围是其 熔点绝对温度的0.75-0.95倍,热锻、热轧和热挤压等即属于这一类。在变形过程 中,回复、再结晶与加工硬化同时发生,加工硬化不断被回复或再结晶软化所抵 消,而使金属处于高塑性、低变形抗力的软化状态。
回复往往是在较低的温度下或较早的阶段发生的过程,再结晶则是在较高 的温度下或较晚的阶段发生的转变。
转变过程中金属的组织和性能都会发生不同程度的变化,直至恢复到冷变形 前的原始状态。此转变过程也即变形金属的软化过程。
1. 回复与再结晶的定义
回复:冷变形金属在低温加热时,其显微组织无可见变化,但其物理、力学性能却 部分恢复到冷变形以前的过程。