移动式垃圾压缩站控制系统设计
16T移动式中转站乡镇移动式垃圾压缩中转站设计方案及性能特点

乡镇移动式垃圾压缩中转站设计方案及性能特点
一、移动式垃圾压缩中转站设计要求和依据:
1、设计要求
1)根据乡镇现行垃圾收集、处理情况及未来垃圾压缩中转的发展规划定位。
2)根据现有场地及服务类型、环保要求等因素,合理选用移动式压缩设备。
2、设计依据
1)基础数据和有关环境污染控制要求介绍
2)《城市环境卫生设施设置标准》(CJJ27-1989)
3)《城市垃圾转运站设计规范》(CJJ47-1991)
4)《大气污染物综合排放标准》(GB16297-1996)二级标准
5)《环境空气质量标准》(GB3095-1996)
6)《城镇污水处理厂污染物大气排放标准》(GB18918-2002)
二、适用场地和环境要求的垃圾压缩设备
根据上述描述,该垃圾压缩中转站配置两箱位的有效深度只要9米,宽度为10米,不暂用场地,也可露天摆放,并且须满足平地进料和较高的环保要求。
故选用机箱连体式垃圾压缩设备,该设备使用寿命长具有如下特点:
1、机箱连体,能缩小垃圾压缩场地面积,垃圾压缩运作场地使用深度在9米之内。
2、上料使用翻斗机构,能满足平地进料要求,减少环卫工人的工作量。
3、压缩机为全密封状态,厢体配置污水收集箱,确保垃圾压缩运作污水不外流,环保性好。
4、实现车箱分离,可一车多箱,循环运输,既能提高运作效率,又能降
低运作成本;双箱位日处理压缩转运垃圾160吨以上。
5、该设备也能作为移动压缩站,只须供给三相电源,就能压缩、转运垃圾,适应临时性、突出性的垃圾清理清运,垃圾压缩中转运作流程图:
6、移动压缩箱图片:
三、移动式垃圾压缩转运设备及转运车的性能特点:。
垃圾压缩站设备方案
垃圾压缩站设备方案引言城市垃圾处理是一个重要的环保问题,由于人口增长和城市化进程的不断推进,垃圾的数量也在不断增加。
为了有效管理和减少垃圾的体积,垃圾压缩站设备成为了必不可少的设施。
本文将介绍一种垃圾压缩站设备方案,以提供一个高效、智能的垃圾处理解决方案。
设备介绍设备原理垃圾压缩站设备是通过利用机械装置对垃圾进行压缩,减少其体积和容积。
设备通常由一个压缩容器和压缩机组成。
垃圾被放置在压缩容器内,当容器满时,压缩机开始工作,将垃圾压缩成紧凑的块状,从而减少垃圾的体积。
压缩完成后,可以通过取出或倾倒容器内的压缩块进行垃圾的处理和清理。
设备特点•高效:垃圾压缩站设备能够快速、高效地将垃圾压缩,减少垃圾处理的时间和成本。
•智能:设备配备了智能控制系统,能够监测垃圾容器的填充情况,并在需要时自动启动压缩机进行垃圾压缩。
•安全:设备采用多重安全防护措施,确保操作人员和环境的安全。
•环保:通过将垃圾压缩成块状,减少了垃圾的体积,提高了垃圾的密度,从而能够节约垃圾处理的空间和资源。
设备应用场景垃圾压缩站设备广泛应用于城市垃圾处理系统中,可以安装在社区、商业区、公园等人流密集的地方。
以下是一些常见的设备应用场景:城市社区城市社区是一个垃圾产生量较大的地方,安装垃圾压缩站设备可以有效地减少垃圾处理的频率和成本。
垃圾压缩站设备可以安装在社区的公共垃圾桶旁边,方便居民进行垃圾投放。
商业区商业区通常是人流较多的地方,垃圾产生量也比较大。
安装垃圾压缩站设备可以解决商业区垃圾处理的问题,提高垃圾处理效率,同时减少对环境的污染。
公园公园是人们休闲娱乐的场所,垃圾产生量也比较大。
安装垃圾压缩站设备可以有效地管理和处理公园内的垃圾,保持公园环境的清洁和整洁。
设备优势垃圾压缩站设备相比传统的垃圾容器有许多优势:1.节约空间:由于垃圾被压缩成块状,相比传统的垃圾容器,垃圾压缩站设备需要的空间更小,能够节约垃圾处理的空间成本。
2.减少频率:由于垃圾被压缩成块状,垃圾容器的容积得以增加,处理频率大大降低,减少了垃圾处理的次数和成本。
垃圾压缩站设计标准
垃圾压缩站设计标准一、引言随着城市化进程的加快和人口的增长,垃圾处理已成为每个城市必须面对的重要问题之一。
由于垃圾量的快速增长,传统的垃圾处理方式已经无法满足需求,因此建设垃圾压缩站成为了一种必要的选择。
本文将探讨垃圾压缩站的设计标准,旨在提供一个全面、详细、完整且深入的设计指南。
二、垃圾压缩站设计要求2.1 压缩效率垃圾压缩站的主要目的是将垃圾进行压缩,以减少存储空间和运输成本。
因此,压缩效率是评估垃圾压缩站设计的重要指标之一。
压缩效率可通过衡量垃圾压缩机的压缩比来评估,压缩比越高,压缩效率就越高。
2.2 设备可靠性垃圾压缩站是一个长期运行的设施,因此设备的可靠性是至关重要的。
垃圾压缩机、传送带和控制系统等设备应具有高度可靠性,能够在持续高强度的工作环境下保持正常运行。
2.3 安全性垃圾压缩站涉及到高压操作和垃圾处理,因此安全性是不容忽视的。
设计时应考虑员工的人身安全和设备运行的安全性,如设备应具备防护装置、紧急停机装置等。
2.4 环保性垃圾压缩站是处理垃圾的设施,应注重环保性。
压缩过程中产生的污染物和废气需要得到有效处理,以减少对环境的影响。
同时,垃圾压缩站应采用节能技术,降低能源消耗。
三、垃圾压缩站设计要点3.1 压缩机选择压缩机是垃圾压缩站的核心设备,选择适合的压缩机是设计的首要任务。
考虑到垃圾的特性,压缩机应具备足够的压缩力和稳定性,同时能够适应垃圾的不同类型和尺寸。
3.2 输送系统设计输送系统是将垃圾从收集点输送到压缩机的关键环节。
设计时应考虑输送带、传送机构、红外线感应系统等,以确保垃圾能够顺利传送到压缩机并进行压缩处理。
3.3 设备布局规划设备布局是垃圾压缩站设计的核心之一。
合理的设备布局可以提高工作效率和安全性。
设备布局中应考虑设备之间的协调性、人员通行的便捷性以及应急通道的设置等。
3.4 控制系统设计控制系统是垃圾压缩站运行和管理的核心。
控制系统应具备自动化、智能化的特点,能够对设备进行监控和控制。
垃圾压缩液压系统设计

垃圾压缩液压系统设计一、垃圾压缩液压系统的基本原理二、组成部件的选择与设计1.液压泵:液压泵是垃圾压缩液压系统的动力源,用于提供高压液体。
在选择液压泵时需考虑其流量和压力等参数,以满足系统对液体的需求。
2.液压缸:液压缸是液压系统的执行元件,通过活塞的运动将垃圾推向垃圾桶的底部。
在设计液压缸时,需要考虑到垃圾的重量和压缩力的大小,以确定液压缸的尺寸和结构。
3.阀门:阀门是液压系统的控制元件,用于控制液体的流动和压力。
在垃圾压缩液压系统中,常用的阀门包括方向控制阀和压力控制阀等。
4.油箱和油管:油箱和油管用于储存和传输液体,油箱需要具备一定的容积和附件,如滤油器、油位表等。
三、系统控制1.方向控制:方向控制是指控制液体的流向,实现液压缸的正反转。
在垃圾压缩液压系统中,常用的方向控制方式有手动控制和自动控制两种。
2.压力控制:压力控制是指确保液压系统的工作压力在一定范围内,以保证系统的正常运行。
在垃圾压缩液压系统中,需要设置压力传感器和压力控制阀等装置,以实现对系统工作压力的控制。
3.安全措施:垃圾压缩液压系统需要考虑到安全性,设置安全阀、溢流阀等装置,以防止系统过压和超载。
四、系统的优化设计为了提高垃圾压缩液压系统的性能和效率1.选择合适的液压泵和液压缸,以满足系统对液体流量和压力的需求。
2.设计合理的液压缸结构,提高垃圾的压缩力和效率。
3.使用高效的阀门和控制装置,提高系统的响应速度和稳定性。
4.优化系统的管路布局和元件连接方式,减小阻力和能源损失。
5.考虑系统的安全性和可靠性,设置相关的安全装置和控制策略。
结论。
移动式垃圾压缩站结构及优化分析

1引言我国城镇化快速发展带来严重的垃圾处理问题。
移动式垃圾压缩站作为一种便捷的垃圾收集转运设备,具有承载量大、破碎功能强等优点。
在垃圾压缩站设计制造过程中,箱体结构性能设计是重要内容,通过对车厢的力学性能和结构性能进行仿真分析,可优化压缩站结构与应力分布,强化其力学稳定性。
2移动式垃圾压缩站结构模型建立2.1整体模型架构利用Hyper Mesh 模型将压缩站板壁结构进行模型处理,将结构空隙、实际结构的焊缝、对结构影响小的孔洞做分部处理,可达到提升网格质量的目的,消除不合理应力及其改变。
根据实际垃圾压缩站尺寸与精度要求,设置网格尺寸为10mm ,按照三角形、四边形混合网格划分后,清除其中翘曲度、倾斜角、雅克比等不符合规范的网格;网格划分结束后需赋予单元属性,其中泊松比为0.3,弹性模量210000N/mm 2,处理后的模型结构如图1所示。
图1模型结构示意图2.2特殊工况及其荷载处理移动式垃圾压缩站结构优化的主要目的是强化设备对不同工况的适应能力,因此,在图1模型的基础上,完成箱体、后门与翻转结构组装后,本模型将危险工况设定为垃圾满载、压缩机构推头推力达到最大值(360000N )、翻转机构角度不超过102毅等[1]。
2.3移动式垃圾压缩站结构稳定性测试采用电阻测试方法,将应变敏感元件粘贴在被测结构表面,在加载情况下结构产生的变形应力可直接传送至应变片上,可根据应变与应力关系推导应力变化情况。
在测试电路中,结构变化导致电阻应变片栅格变形,使电阻值发生改变,【作者简介】张莉霞(1980~),女,山东聊城人,工程师,从事环卫建筑工程研究。
移动式垃圾压缩站结构及优化分析Structure and Optimization Analysis of Mobile Garbage Compression Station张莉霞(聊城市城市环境卫生管理服务中心,山东聊城252000)ZHANG Li-xia(Liaocheng City Environmental Sanitation Management Service Center,Liaocheng 252000,China)【摘要】针对移动式垃圾压缩站性能有限的问题,利用Hyper Mesh 模型提出移动式垃圾压缩站结构优化方案,解决了该装置载荷受限问题,降低了各铰点的约束力,强化翻转结构性能的目标。
垃圾压缩转运站施工组织设计

垃圾压缩转运站施工组织设计一、前言垃圾压缩转运站是城市垃圾处理系统中的重要组成部分,负责收集、压缩和转运垃圾。
为了保证施工的顺利进行,需要进行合理的组织设计。
本文档旨在详细描述垃圾压缩转运站的施工组织设计,并提供相应的指导。
二、施工组织设计目标垃圾压缩转运站的施工组织设计目标如下:1.合理安排施工人员和设备,确保施工进度和质量。
2.确保施工现场的安全和环境保护。
3.最大程度地减少对周边居民和交通的影响。
4.加强施工过程的监督和管理,及时解决施工中出现的问题。
三、施工组织设计原则垃圾压缩转运站的施工组织设计应遵循以下原则:1.充分调研:在设计前进行充分的调研,了解场地情况、环境要求、工期等相关因素。
2.合理布局:根据场地情况和功能要求,合理布局施工设备、材料堆放区、施工现场办公区等。
3.安全管理:建立有效的安全管理制度,确保施工现场的安全。
必要时应提供安全培训。
4.资源合理利用:合理安排人员、设备和材料,避免资源浪费。
5.环境保护:采取必要的措施减少施工对环境的影响,如噪音控制、扬尘防治等。
6.施工监督:设立专门的监督组织,加强对施工过程的监督,并及时解决问题。
四、施工组织设计内容1. 施工人员组织设计根据垃圾压缩转运站的规模和施工进度,合理组织施工人员。
施工人员主要包括项目经理、工程师、技术员、施工人员等。
需要确保施工人员具备相关资质、经验和技能,并提供必要的培训。
2. 施工设备组织设计合理选择施工设备,并按照施工进度和工艺要求进行布置。
常见的施工设备包括挖掘机、起重机、混凝土搅拌站等。
根据场地情况和人员需求,确定设备数量和位置。
3. 施工现场布置设计根据垃圾压缩转运站的功能要求,合理布置施工现场。
包括施工设备的摆放位置、材料堆放区、施工办公区等。
需要保证施工现场的通道畅通,材料有序堆放。
4. 安全管理设计建立有效的安全管理制度,包括施工安全责任制、安全生产教育培训制度等。
提供必要的安全防护设施,如安全帽、防护眼镜等。
移动式垃圾压缩站液压系统设计
MA Zong-zheng1袁2袁 WANG Qing-chen2袁 YAN Xiu-peng1袁 WANG Kai-fei2
渊 1.Department of Mechanical Engineering袁 He爷nan Institute of Engineering袁 He爷nan Zhengzhou 451191袁 China曰 2.Shangcai Hengtong Machinery Co.袁 Ltd.袁 He爷nan Shangcai 463800袁 China冤
故障诊断的效率[11-12]等方面进行优化设计袁移动式垃圾压缩站的 液压系统是其工作的主要部件袁 影响着压缩站整体的工作性能袁 为此针对移动式垃圾压缩站液压系统进行了设计遥
2 移动式垃圾压缩站工作原理
移动式垃圾压缩站的基本结构袁如图 1将垃圾倒入收料 斗 1 内袁启动控制开关袁提料液压缸 3 伸出袁将收料斗 1 提升至收 集箱的上方把垃圾倒入垃圾箱 6 的前半部分曰然后推压液压缸 4 伸出压缩垃圾袁反复压缩 2 次袁然后回到初始位置遥当垃圾箱内部 垃圾装满时袁由专用转运车拉到垃圾填埋场袁启动尾门控制开关袁 尾门液压缸 7 伸出袁尾门开启并倾倒垃圾袁之后尾门液压缸缸复 位锁紧后门遥
1 引言
随着城市垃圾数量的不断增加袁垃圾处理日益受到关注[1]遥 常见的处理方式有填埋堆肥尧焚烧及热解气化等袁无论是哪一种 处理方式袁其收集和运输是必要的环节[2]袁为此垃圾在收集的同时 进行压缩然后再运输已经成为一种有效减少垃圾体积尧 运输量尧 场地和腐化性的方法袁因此设计开发用于固体垃圾的收集压缩和 运输的设备成为垃圾处理领域的研究热点[3-5]遥
探究压缩式垃圾车控制系统设计

( 四) 衔接 工序 以及限位 保护 。 实现 限位保 护的一个 重要手 段就 是在控制 系 统 设计 过程 中加入 限位 开 关 , 通 过 加入 限位开 关将 能够 有效达 到 目的 。 设计 过
程 中可 以把 限位开 关设 置在 刮 板、 滑 板 的动作 纤维 出 。 这样 当刮 板及 滑板动 作
质量 , 在 今 后工 作过 程 中就要 加 强这 方面和 自动控 制两 种方 式 。 这 两 种控制 方 式的使 用环 境是 不一样 的 在 平常 工 作过程 中一 旦 出现粗 大物 件卡 滞这 种情 况的 时候就 需要 手动 操作 按钮 来达 到 目的 。 尾箱 内部 的垃 圾过 满 的时候 则 是通 过短 循环 操纵 来达 到 目的 。 ( 二) 紧 急停 止功能 的设 计 。 在实 际运 行过 程 中垃圾 车极有 可 能 出现意 外 情况, 一 旦 出现意外情 况之 后就要保 证垃 圾车 能够立刻 停止 一切动作 从而避 免 造 成人 身 伤害 。 为了达 到 这一 目的 , 在设 计 过程 中就 可 以设 计3 个紧 急停 止按
关还能够有效保证各个动作之间的衔接。 这对于维护控制系统的正常运行无疑
在 我国城 市人 口不 断增 多 , 城镇 化率 快速上 升 的今天 , 城 市垃 圾数 量急 剧
通 常利 用一 个按 钮就 能够 实现 自动 循环 , 手动 控制 则 是要 通过 手 动操 作来 实 现。 在 设计 过程 中就应 该按 照 以上要 求 夹进 行设 计
( 一 )确定 控制 方 式 。 对 于控 制方 式 , 垃 圾车 的 每个 环节 都 应该设 置有 手
本 上 可 以分 为 填装机 构 、 液压 系 统 、 厢体 、 电控系 统 以及卸 载机 构这 五部分 。 填 装机 构是 由刮 板 、 滑板 以及 各 自油缸 组成 的 。 滑板在 设 计过程 中主要是 要沿 着
垃圾压缩机推头控制系统设计
f 1 通过
Байду номын сангаас
电气的智能 化控制 解决上述 问题 。
的高 . ・ } I _ 垃圾 巡m J 没 定高 度,P L C② 陵取 到超
轴承损毁 时有发生。我国国内个体客 户在 中近 幅度下吊 臂重心 他 距 [ 口 J 转 中心较近 。所以,相 同的 臂体,如果
匝晕 戈 简 作业 比较 频繁 ,故 障 率 较 高,同步 伸缩 机构 采片 】 l i d 步伸缩 系统,存 『 十 】 问臂长时,起晕性能可 以提 高。
推头 电
料? t 【 I 1 的 圾推送 垃 圾箱 『 7 、 J , 井实现垃圾 乐缩 的功能 , 1 . 2 垃圾 压 缩 机原 理和 措施
心 什 f 推 装 ,H前行业 内推头装 置的运行普 遍 托能、低设 和 趟7 } i 波 感器 ①的 信 ・ 怍 勾输 入点连接 刮 P L C②, 性 低等 问题 ,本系统的设 计 旨 超 波 传感 器①安 装 料 } | l 沿 } l } J 划量 料 勺 垃 圾
中刊 圾 中 转 站 , 过 站 内 的垃 圾 缩 机 压 实 减 容 后 装 入 垃 圾 转 运 集 箱 ,运 输 到垃 圾 处 理 』 1 i l 。 垃 圾 压 缩 机 足 垃 圾
1 1 转站 天键没 备,推头 装置是垃 圾压 缩机 的核心部 件,也是垃圾 缩机 运行 频牢最高的部 件。垃 圾压 缩机 的, J ‘ 椎性 挂 度上取决 r推头的控制,另外,推头运行效 果直接影响着垃圾 缩i , ' J I E 牦 、效率和密实度 1 2 I 。
的随车起 重机的吨位越 大情 况越明显, 维修成本 比较高 ;
另外,随车起重 机现场 作业 叫,还J 、 考 虑到吊臂作
基于PLC的垃圾压缩站控制系统的研究
基于PLC的垃圾压缩站控制系统的研究随着城市化进程的不断推动和发展,人民生活水平日益提高,随之而来的是大量生活垃圾的产生,造成了生态环境的破坏和污染,导致温室效应问题不断加剧,城市面临着生活垃圾处理不及时、街道脏乱差的问题。
因此,人们不断呼吁着爱护城市、保护环境,同时做出了各种举措。
在科学技术方面,人们研究了各类环保设备使生活垃圾堆积问题得到了很大的缓解,其中垃圾压缩站是重要的一员,在城市生活中随处可见。
本文研究了基于PLC的垃圾压缩站的控制系统,该系统提高了压缩站的工作效率和自动化程度,具有高可靠性、智能化、友好的人机界面和广阔的应用前景等特点。
标签:垃圾压缩站PLC控制系统1引言随着目前城市生活垃圾堆积问题变得越来越严峻,垃圾处理成为了人们重点关注的问题之一。
垃圾压缩站能够完成垃圾的收集和压缩,有效的减少了垃圾运输的效率和成本。
本文研究了基于PLC的垃圾压缩站的控制系统,阐述了控制系统的总体设计方案,针对传统控制系统方案和PLC控制系统方案进行了比较,完成了系统的硬件和软件设计,具有较大应用价值。
2控制系统总体设计方案2.1工作原理垃圾压缩站通常包括埋地式垃圾压缩站和移动式垃圾压缩站,埋地式垃圾压缩站压缩能力强,但机动性较差;而移动式垃圾压缩站压缩能力较差,但机动性强。
由于城市空间位置相对狭小,人口集中,场地受限,因此经常使用的是移动式垃圾压缩站[1]。
移动式垃圾压缩站主要由收料斗、垃圾压缩箱、压缩机构、箱体、控制面板、电气系统和液压系统组成。
收料斗负责收集垃圾;压缩机构负责提升收料斗并将垃圾倒入垃圾压缩箱内,同时完成垃圾的压缩;箱体负责存储垃圾;控制面板负责完成人机交互,工作人员通过控制系统实现压缩站的控制;电气系统负责垃圾压缩站内的供电及信号交联;液压系统负责为垃圾压缩站提供动力[2]。
当检测到垃圾运输车的到来,垃圾压缩站通过自卸或在人工的指引下将垃圾倒入收料斗内,工作人员通过控制面板启动控制开关,使收料斗提升至一定高度,并将垃圾倒入垃圾箱的前半部分,然后通过推压完成垃圾的反复压缩,当垃圾箱装满后,由转运车运送到垃圾填理场,启动控制开关使垃圾倾倒完毕,完成整个工作流程。
移动式压缩站电气控制系统优化设计与研究
配套应用移动式压缩站电气控制系统优化设计与研究颜仁喆王进钰甘肃建投重工科技有限公司,甘肃兰州,730000摘要:移动式压缩站具有随车移动的工况特性,其内部搭设的动力单元控制系统应该趋近于环卫车主流嵌入式控制系统设计,但目前市面上压缩站动力单元控制系统大多使用工业PLC 加触摸屏的控制方式,其接线方式及硬件封装都不太适应车载环境。
针对该问题,提出了一种基于嵌入式控制器的动力单元控制系统,为该类产品系统开发提供了新思路。
关键词:动力单元;车载环境;嵌入式控制器中图分类号:U463收稿日期:2023-01-17DOI:10.19999/ki.1004-0226.2023.05.0151前言随着人们生活水平的提高,城市生活垃圾产量也日益增多,大量的城市生活垃圾如何实现高效收集转运备受环卫行业关注。
为减少散装垃圾单次运距以及长距离运输次数,一种自带压缩功能的移动式垃圾压缩站被市场广泛应用。
一些致力于开发电液集成单元的企业都相继开发了集成度高且便携装配的压缩站动力单元总成,但是在控制系统开发方面还是沿用了工业自动化产品的开发方式,使用工业PLC 作为核心控制单元与触摸屏建立通信,实现触摸屏端的控制以及参数读取[1]。
虽然压缩站进行压缩填装作业时处于静止状态,但工业PLC 驱动能力较弱,往往需要配合大量的继电器群,并且其硬件封装防护等级不高,使其在设备整体运输过程中面临很大的挑战,硬件可靠性也大幅度降低。
另外,若考虑到配置的经济性,往往在保证开关量恰好满足的情况下模拟量采集点会明显不足,最终使整个系统构建庞大且繁琐,不适应运载环境。
本文使用一种封装可靠的嵌入式集成控制器替代传统工业PLC ,在最大化减少硬件配置的情况下提升产品的操控性能。
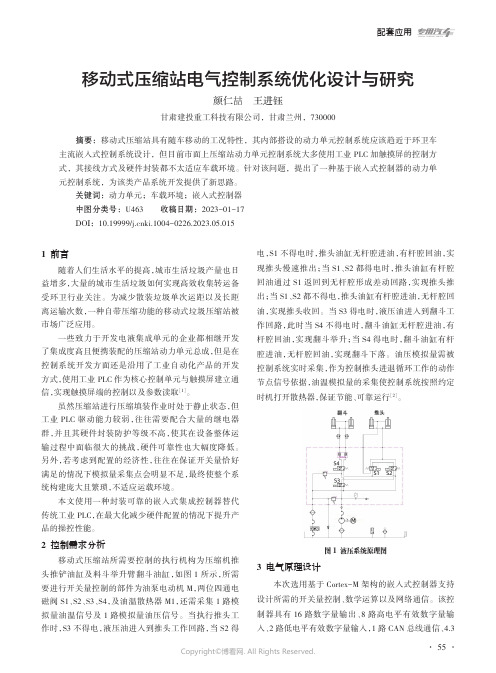
2控制需求分析移动式压缩站所需要控制的执行机构为压缩机推头推铲油缸及料斗举升臂翻斗油缸,如图1所示,所需要进行开关量控制的部件为油泵电动机M ,两位四通电磁阀S1、S2、S3、S4,及油温散热器M1,还需采集1路模拟量油温信号及1路模拟量油压信号。
移动式垃圾压缩机及集液压系统简介
移动式垃圾压缩机及集液压系统简介摘要:本文介绍的移动式垃圾压缩机采用市场主流技术,并在现有产品基础上进行技术升级,本文较为全面的介绍了该产品的各结构部件以及液压系统关键技术。
关键词:移动式垃圾压缩机;液压系统移动式垃圾压缩设备适合应用在处理量较小的小区或人口比较密集的展馆或公园,其相对其他压缩设备,可体现出很多的优点:可根据垃圾情况相应增减压缩箱的数量;无垃圾送达的时间限定,随到随压缩,无等待时间;只需一名管理员即可进行全过程的压缩作业;作业、停放及运输过程中均处于全密封状态,无烟尘和恶臭气味溢出,无污水滴漏,无二次污染。
一、移动式垃圾压缩机主要部件及工作流程1、箱体箱体为垃圾的储备装置,压缩腔和压缩头采用高强度耐磨钢板,内边角采用圆弧过渡,三个侧面都有一定的锥角,便于卸料;箱体采用了无筋板设计,两边板为整板结构,外形流畅、美观。
对于水份含量高的垃圾,则箱体上专门设置了污水排放装置。
2、料斗及举升机构料斗及举升装置,是通过举升机构将特制的料斗与箱体连为一体的系统总成。
需要装入垃圾时将料斗放下,倒入垃圾,然后通过举升机构将料斗举起,把垃圾倒入压缩腔。
运输时料斗直接盖在压缩腔上方,与箱体一起转运。
这种结构使用方便,用户的使用现场只需要有380V外接电源即可开始使用,充分提高了设备的转场使用效率。
3、压缩腔和压缩头压缩头由耐腐蚀高强度合金钢板焊接而成,采用无导轨设计。
四周间隙小,可有效防止垃圾滞留在机体内。
压缩腔内设置固定抓钩,可防止压挤进去的垃圾回弹;压缩推板采用双曲线外形设计,可使压缩比达到最大。
投料口大,投装垃圾更方便。
压缩头的所有部件均进行了严格的防腐、防锈、耐磨处理。
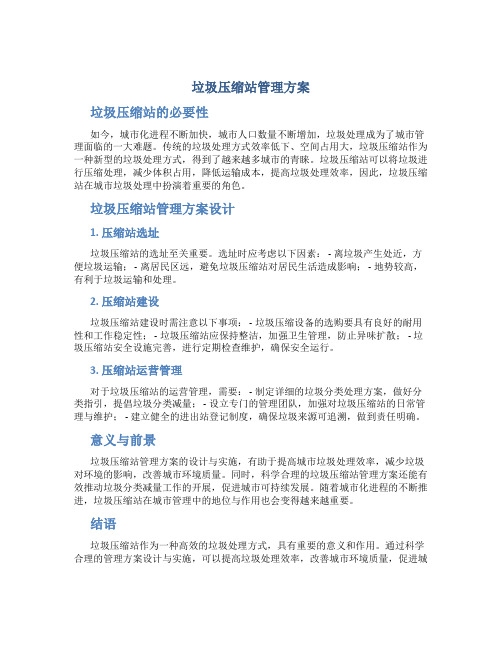
图1 移动式垃圾压缩机收转运工作流程图散装的垃圾通过收集收集起来倒入料斗中,翻转油缸将料斗举起倒入投料口内,压缩推头将垃圾推入箱体,每个压缩过程推头压缩次数可以根据实际需要设定,保证垃圾完全压入箱内。
当箱体压满后由钩臂车运至垃圾处理厂。
垃圾压缩站管理方案
垃圾压缩站管理方案垃圾压缩站的必要性如今,城市化进程不断加快,城市人口数量不断增加,垃圾处理成为了城市管理面临的一大难题。
传统的垃圾处理方式效率低下、空间占用大,垃圾压缩站作为一种新型的垃圾处理方式,得到了越来越多城市的青睐。
垃圾压缩站可以将垃圾进行压缩处理,减少体积占用,降低运输成本,提高垃圾处理效率,因此,垃圾压缩站在城市垃圾处理中扮演着重要的角色。
垃圾压缩站管理方案设计1. 压缩站选址垃圾压缩站的选址至关重要。
选址时应考虑以下因素: - 离垃圾产生处近,方便垃圾运输; - 离居民区远,避免垃圾压缩站对居民生活造成影响; - 地势较高,有利于垃圾运输和处理。
2. 压缩站建设垃圾压缩站建设时需注意以下事项: - 垃圾压缩设备的选购要具有良好的耐用性和工作稳定性; - 垃圾压缩站应保持整洁,加强卫生管理,防止异味扩散; - 垃圾压缩站安全设施完善,进行定期检查维护,确保安全运行。
3. 压缩站运营管理对于垃圾压缩站的运营管理,需要: - 制定详细的垃圾分类处理方案,做好分类指引,提倡垃圾分类减量; - 设立专门的管理团队,加强对垃圾压缩站的日常管理与维护; - 建立健全的进出站登记制度,确保垃圾来源可追溯,做到责任明确。
意义与前景垃圾压缩站管理方案的设计与实施,有助于提高城市垃圾处理效率,减少垃圾对环境的影响,改善城市环境质量。
同时,科学合理的垃圾压缩站管理方案还能有效推动垃圾分类减量工作的开展,促进城市可持续发展。
随着城市化进程的不断推进,垃圾压缩站在城市管理中的地位与作用也会变得越来越重要。
结语垃圾压缩站作为一种高效的垃圾处理方式,具有重要的意义和作用。
通过科学合理的管理方案设计与实施,可以提高垃圾处理效率,改善城市环境质量,促进城市可持续发展。
因此,加强垃圾压缩站管理,提升管理水平,助力城市垃圾处理工作的顺利进行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
移动式垃圾压缩站控制系统设计Design of control system of movable waste compression station马宗正1,彭劲周1,王清臣2,王凯飞2,张乾助1MA Zong-zheng 1, PENG Jin-zhou 1, WANG Qing-chen 2, WANG Kai-fei 2, ZHANG Qian-zhu 1(1.河南工程学院 机械工程学院,郑州 451191;2.上蔡县恒通机械有限公司,上蔡县 463800)摘 要:随着我国城镇化速度的加快,城市垃圾处理问题变得越来越严峻,而垃圾收集和运输是必不可少的环节,为此移动式垃圾压缩站以其可以有效的减少垃圾体积和运输次数的优势日益受到关注,为了提高其智能化程度,针对其控制系统进行了设计。
在完成总体设计的基础上,分别对单片机系统、温度处理系统、数据存储等硬件系统和对应的软件系统进行了设计,并进行了组装调试,经实机测试所设计的控制系统能够完成垃圾收集与自动压缩等操作,实现了一键化控制。
关键词:垃圾压缩站;移动式;控制系统;设计中图分类号:TH248 文献标识码:A 文章编号:1009-0134(2019)01-0122-04收稿日期:2018-03-19基金项目:2018年河南省产学研合作试点项目(182107000005);河南省教育厅高度学校重点科研项目(18B460001)作者简介:马宗正(1981 -),男,山东济南人,副教授,博士,主要从事机械节能减排技术方面的教学和科研工作。
0 引言随着我国城镇化进程的不断加快,城市垃圾处理也变得越来越严峻[1]。
目前我国垃圾处理的主要方法有填埋、热解气化、焚烧发电及堆肥,无论是哪一种处理方法,垃圾的收集与运输是必不可少的一个在重要环节[2],因此垃圾收集和运输设备成为垃圾处理领域的研究热点[3,4]。
由于垃圾密度较小,在收集和运输过程中导致体积庞大,大大增加了成本,因此垃圾在收集的同时进行压缩然后再运输已经成为一种有效减少垃圾体积、运输量、场地和腐化性的方法。
目前垃圾压缩方法有两种,一种是埋地式垃圾压缩站[5],一种是移动式垃圾压缩站[6],地埋式垃圾压缩站垃圾压缩处理能力要强于移动式垃圾压缩站,移动式垃圾压缩站机动性较强,为此移动式垃圾压缩站在人口相对集中,但是场地受限制的地方应用较为广泛。
目前,移动式垃圾压缩站的设计主要从提高垃圾压缩力[7]、液压系统自动化控制程度[8,9]、智能故障诊断的效率[10]等方面进行优化设计,特别是控制方面,无论是垃圾的收集还是压缩,基本还是采用独立按钮分别控制,自动化控制方面还有待改进,为此针对移动式垃圾压缩站控制系统进行了设计。
1 总体方案设计及选择1.1 移动式垃圾压缩站工作原理移动式垃圾压缩站的基本结构如图1所示,主要包括收料斗、提料液压缸、推压液压缸、推压板、尾门液压缸、箱体、控制面板及液压泵站组成。
其中,收料斗负责收集垃圾,提料液压缸负责将收料斗提升进而将垃圾倒入垃圾箱内,推压液压缸通过推动推压板实现垃圾的压缩,尾门液压缸实现垃圾箱体的密封,箱体是垃圾存储装置,控制面板通过控制系统实现压缩站的控制,液压泵站提供需要的动力。
其工作过程如下:当载有垃圾的车辆,通过自卸或人工的方式将垃圾倒入收集料斗1内,启动控制开关,提料液压缸3伸出,将收集料斗1提升至收集箱的上方把垃圾倒入垃圾箱6的前半部分;然后推压液压缸4伸出压缩垃圾,反复压缩3次,然后回到初始位置。
当垃圾箱内部垃圾装满时,由专用转运车拉到垃圾填埋场,启动尾门控制开关,尾门液压缸7伸出,尾门开启并倾倒垃圾,之后尾门液压缸复位锁紧后门。
218345671.收料斗;2.控制面板;3.提料液压缸;4.推压液压缸;5.推压板;6.箱体;7.尾门液压缸;8.液压泵站图1 移动式垃圾压缩站结构示意图1.2 控制系统总体方案如前所述,目前移动式垃圾压缩站基本采用独立按键控制,自动化程度不高,为此本设计采用了一键式控制系统,即按一次即可实现翻斗翻转上料、垃圾压缩、翻料斗回位等操作。
为此,移动式垃圾压缩站的控制系统包括温度信号处理模块、单片机模块、数据存储模块、数字开关量处理模块、电源模块、显示模块、数据传输模块及报警模块等部分,如图2所示。
其中,温度信号处理模块是用于测量液压系统的温度,起到保护作用;单片机模块用于接收控制指令进而实现压缩站系统控制,同时还包括系统保护;数据存储模块能够对压缩次数、系统温度等数据进行存储;数字开关量处理模块负责接收外部按钮控制;电源模块负责整个控制系统的供电;显示模块显示本机垃圾处理次数及当前系统工作温度;数据传输模块能够实现单片机存储数据的读取;报警模块根据系统温度,确定是否超过安全值,如果超过安全值则以蜂鸣器的方式报警。
图2 控制系统结构框图2 移动式垃圾压缩站硬件设计根据控制系统的总体结构,硬件系统设计主要包括单片机最小系统、温度信号处理系统、数据存储器模块、电源模块、显示模块、数据传输模块、报警模块及数字开关量处理模块等部分。
2.1 单片机最小系统最小系统包括单片机、复位电路和时钟电路,如图3所示。
本系统采用8位单片机AT89C52,该单片机包含8K 的可编程FLASH ,256B 的RAM ,32个I/O 口,五个中断源、两个16位定时器,完全满足外部输入和控制输出通道数的要求;复位电路采用上电复位方式;时钟电路晶振11.0592MHz。
图3 最小系统2.2 温度处理系统设计系统工作温度的测量采用K 型热电偶,处理模块选用MAX6675,该模块能够对K 型热电偶进行冷端补偿、线性化、放大、A/D 转换等作用[11],其硬件系统如图4所示。
MAX6675具有12bit 转换精度,其输出数据和实际温度之间的关系如下式所示:1023.75/4095emp um T N =×式中,T emp 为实际测量温度,℃;N um 为转换后的数字量,最大值为4095。
图4 温度采集和转换电路2.3 数据存储系统设计数据存储模块要求断电不丢失,为此选用了EEPROM 型存储器,因为温度变化较缓慢,所以对温度的测量为每半分钟1次,温度传感器MAX6675输出的12位数据经标度变换后只占1个字节(油温上限85℃),一般垃圾压缩站一天的工作次数在20~30次左右,每次工作时间3分钟,则每天记录1个温度传感器检测的数据需要的存储空间大小为: 1(B)×2(次/min) ×90(min)=180Byte ≈0.18kB对于运输次数,每天为30次,每个记录数据占1个字节,则记录1天的数据所需要的存储空间大小为: 1(B)×30次=30Byte ≈0.03kB粗略估计,每天存储的数据量为0.2kB ,按照每一个月读取一次数据来算,大约需要6kB 的存储空间,在考虑经济性的基础上,选择AT24C64,该芯片的存储空间为8kB ,能够满足存储要求。
需要说明的是该芯片的读取需要遵循IIC 协议[12],但是所采用的52单片机没有IIC 通讯端口,为此采用软件模拟IIC 通信协议,其电路连接如图5所示。
图5 AT24C64与单片机的连接2.4 电源设计系统各芯片所需电源都是DC +5V 。
先将交流220V 降为12V ;再整流为直流+12V ;稳压滤波后输出稳定的DC +5V 。
2.5 显示模块设计显示采用液晶显示模块,选用LCD1602液晶模块,其灰调节采用10k 电阻和1k 电阻进行分压的模式,与单片机的连接如图6所示。
图6 液晶显示电路2.6 串口通信由于单片机输出是T T L 电平,而P C 输出是-12~+12V 电平,所以需要一个MAX232串口通信模块芯片,构成电平转换电路,实现通信时电平信号的匹配,其连接电路如图7所示,其中C1-和C2-表示连接点,分别连接电容的一端。
图7 MX232串口通信电路同时编写了上位机程序,将存储的数据上传到上位机,如图8所示。
该软件采用VB 编写,上位机接收到的数据可以*.text格式存储,便于其他软件的调用分析。
图8 上位机界面2.7 报警装置设计报警系统设计较为简单,采用蜂鸣器的方式进行报警。
液压油一般工作温度最高85℃,当温度超过85℃时,温度报警蜂鸣器响,对应的指示灯亮,其控制连接如图9所示。
ⴅ㘚㡘⡉㈐⮈㔘ⴅ㘚㡘 ⧅䎞Ⱝ⧅䎞Ⱝ图9 声音报警电路2.8 开关量处理模块在压缩站工作过程中,工作的开始需要按钮控制、液压缸极限位置需要限位开关控制,同时还涉及到垃圾压缩箱堆满报警的限位开关,而这些控制开关的共同点是其输出的全部是开关量,可以直接输出给单片机,在此不再赘述。
3 系统的软件设计3.1 主流程移动式垃圾压缩站上电后液压系统开始工作,当检测到工作按钮按下后开始工作,依次进行翻斗倒入垃圾、推头自动压缩垃圾、温度检测、垃圾箱填满及数据传输等程序,主流程图如图10所示。
㋋㬝ⳎⰘ⭚㧌㎍〙㵧㵘䓵Ⱀ䁚㰖㻖㵔㸣Ⱙネ⥃㎍〙㳏㕛ネ⥃㭞㈾⪌㭅图10 控制系统流程图3.2 翻料斗工作流程翻料斗工作开始与否取决于工作按钮,当工作按钮按下时翻斗开始上升,直到达到限位开关,然后开始下降,直到另一限位开关,翻斗停止工作,进入下一步垃圾压缩过程,流程如图11所示。
㋋㬝ⴒⴒⴒ㬨㬨㬨⹅䔘➕㝆ⳎⰘⶸ㩰㪞ⳎⰘⶸ㻣ㅖⳎⰘⶸ㵄䐚㎍〙䁚㰖㬨ⴒ⭞㸜㬨ⴒ⭞㸜㬨ⴒ⭞㸜㬨ⴒ⭞㸜㬨ⴒ ⪯㋋㬝㵧㵘㣑㆙㵧㵘⽔㵬ⳎⰘⶸ㵄䐚㸣Ⱙネ⥃ⴒⴒⴒ㬨㬨㬨㬨图11 垃圾入箱过程图12 垃圾压缩过程3.3 垃圾压缩流程垃圾入箱后,需要对垃圾进行压缩,此时推头前进,直到遇到限位开关,然后返回,遇到限位开关停止工作,同时进行计数,当完成3次压缩后进入温度检测程序,流程如图12所示。
3.4 其他子程序判断垃圾箱是否填满、温度是否超过限值及是否进行数据传输,均利用标志数据进行判断,其过程基本一致,在此不再赘述,只给出流程图,具体如图13~图15所示。
4 实物测试控制系统设计完成后,结合液压系统进行了组装调试,完成的移动式垃圾压缩站如图16所示。
图16 移动式垃圾压缩站实物图同时对该压缩站进行了测试,测试内容包括有效容积、自重、推铲运行时间、压缩压力及压缩比,其中最大压缩力可达210kN,压缩比可达2:1以上,其他测试数据详如表1所示。
压缩站能够完成垃圾收集与压缩等功能,达到了设计目的。
表1 实训台测试结果测试项目结果移动式压缩垃圾箱有效容积,m3≥10移动式压缩垃圾箱自重,kg≤3500推压铲往复运行时间,s≤31最大压缩力:kN≥210生活垃圾压缩比≥2:1㋋㬝㎍〙㳏㕛㋋㬝⡉㈐㭞㈾⪌㭅ⴒ㬨㋋㬝Ⱒ㦂㸣Ⱙ㬨ⴒ⧍ⷀⴒ㬨㋋㬝⡉㈐㭞㈾⪌㭅㋋㬝㋋㬝⪌㭅䁎ⴒ㬨⢋䐟㸜㸋图13 垃圾填满报警图14 温度过高报警图15 数据传输5 结束语根据实际工程需要设计了移动式垃圾压缩站一键式控制系统,通过硬件和软件的设计完成了控制系统的设计,并进行了实机测试,测试结果表明,所设计的控制系统能够实现垃圾的自动收集和压缩,达到了预期目标。