2019年浙江工业大学考研试题828自动控制理论
浙江工业大学自动控制原理历年真题及答案--by yze 2014.11.9
浙江工业大学
自动控制原理
历年真题及答案(2005-2013)
说明:
真题从05年到13年,其中10-13年真题分专硕与学硕两种,09年及09年以前的真题不分专硕学硕。
本人考的是专硕,备考的的时候专硕学硕的试卷都做,因为专硕有些知识点是明显不考的,所以学硕的试卷有些题目就没做的。
真题答案是通过拍照再转为文档的,有的还是铅笔笔记,不清晰的地方还望谅解(可以在电脑上PDF放大看比较清晰),自己思考下应该也可以理解的。
答案仅供参考,不对之处,敬请批评指正!
最后,祝大家考试顺利,欢迎加入浙工大!
--By YZE
2014.11.09
2013年自控试题(专硕)
2013年自控试题(学硕)
2012年自控试题(专硕)
2012年自控试题(学硕)
2011年自控试题(专硕)
2011年自控试题(学硕)
2010年自控试题
2009年自控试题
2008年自控试题
2007年自控试题
2006年自控试题
2005年自控试题。
2019年武汉科技大学827自动控制原理(B卷)考研真题

2019年攻读硕士学位研究生入学考试试题(参考答案)科目名称:自动控制原理(□A 卷█B 卷)科目代码:827考试时间:3小时 满分150分一、简答题(共5小题,每小题5分,共25分)1、PI 控制器的中文全称是 ;PID 中具有相位滞后特性的环节是 。
答:比例微分控制器;I(积分)环节。
2、离散系统传递函数的定义是。
答:零初始条件下,系统输出的Z 变换与输入的Z 变换之比。
3、函数的拉氏变换为。
)(1)31(24t e e t t ---答:函数的拉氏变换为。
)(1)21(24t e e t t ---213141+-+s s 4、设,则序列的Z 变换为 。
⎪⎩⎪⎨⎧<=⎪⎭⎫ ⎝⎛=0 ,0,2,1,0 ,51)(2n n n x n)}({n x 答:。
25125111)()(10-=-==-∞=-∑z zz z n x z X n n 5、某线性定常系统的单位阶跃响应为,则该系统传递函数为 。
t e 21--答:。
22+s 二、判断对错并简单说明理由(共2小题,每小题5分,共10分)1、设闭环系统的传递函数为,该系统是稳定的。
162+++s s s 答:错。
系统传递函数不是真有理分式。
或含有微分项。
16162++=+++s s s s s 2、设线性时不变闭环系统零初始条件下的单位阶跃响应为,对时间)(t h )(t h t 的导数记为,则此线性时不变系统的传递函数为的拉氏变换。
)('t h )('t h答:对。
系统单位阶跃响应的导数为单位脉冲响应,其拉氏变换为传递函数。
三、方框图化简(20分)试简化如图所示系统方框图,并分别求系统的传递函数和)(/)(s R s C 。
)(/)(s N s C题三图解答:)(1)(1)(2323233123s N G G G G s R G G H G G G G s C +-+-=所以,.1)()( ;1)()(2323233123G G G G s N s C G G H G G G G s R s C +-=+-=四、计算题(20分)已知如图所示系统的闭环极点为,其中221 ,22121j s j s --=+-=。
武汉科技大学827自动控制原理-2019(A卷答案)
2019 年攻读硕士学位研究生入学考试试题(参考答案)科目名称:自动控制原理(█A 卷□B 卷)科目代码: 827考试时间: 3 小时满分 150 分、简答题(共 4小题,每空 3分,共 30分)1、 PI控制器的中文全称是;PID 中具有相位超前特性的环节是答:比例积分控制器; D(微分)环节。
2、已知E(z)(z 15)(z z 2),求e*(t)*k 答:e* (t) e(KT) 5 2k 53、已知某线性定常系统的单位阶跃响应为h t 5(1 e 5t),则该系统的传递函数G s 为。
5答:G(s)52s 1as 14、某单位负反馈控制系统的开环传递函数为G(s)as 1,式中 a 0.4,b 0.5系统开s(s b)环零点为开环极点为;闭环极点为答:开环零点: -2.5;开环极点: 0, -0.5;闭环极点: -0.45+0.89j,-0.45-0.89j ;2s 15、已知超前校正装置的传递函数为G c(s),则其最大超前角所对应的频率c 0.32s 1答: 1.256、频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅值穿越频率c 对应时域性能指标;它们反映了系统动态过程的。
答:调整时间t s;快速性二、分析题( 15 分)工业上使用的光电纠偏器常用于钢厂、纺纱厂等长距离走料场合,其功能是纠正长距离物料在走料过程中偏离中心的误差,其原理图如图 1 所示,其中,光电位置传感器的输出为电压信号。
要求:(1)指出该系统的输入量、输出量和反馈量;(2)叙述该大门开门和关门工作原理;(3)绘制系统结构图。
1) 系统的输入量:给定电位器电压 U r输出量:物料的中心位置反馈量:光电位置传感器电压 U f ; 2) 回答出偏差控制思想即可 3)三、求传递函数 (10 分)已知某系统的结构图如图 2 所示, 1)求系统的传递函数 C(s) / R r (s) ; 2)求系统的传递函数 C(s)/ R n (s)。
828自动控制理论(学术型)

浙江工业大学2016年硕士研究生入学考试自命题科目考试大纲科目代码、名称:828 自动控制理论专业类别:学术型□专业学位适用专业:控制科学与工程、系统分析与集成一、基本内容反馈控制系统,开环、闭环与复合控制系统,线性系统与非线性系统,连续系统与离散系统等基本概念。
对控制系统性能的基本要求和稳定性,暂态性能,稳态性能等基本概念。
控制系统数学模型的概念和建立数学模型的方法。
微分方程模型及建立系统微分方程模型的步骤和方法。
传递函数概念,传递函数与脉冲响应函数的定义,传递函数的表达形式,控制系统传递函数模型的建立。
线性系统基本环节,控制系统的结构图,结构图的等价变换与化简。
控制系统频率特性的定义、物理意义及求取,典型环节、开环频率特性的伯德图(Bode),由伯德图确定系统的频率特性和传递函数。
控制系统稳定性的定义与稳定性条件(连续/离散系统),劳思(Routh)稳定判据,朱利(Jury)稳定判据,奈奎斯特(Nyquist)稳定判据,相对稳定性分析(幅值裕度和相位裕度)。
控制系统稳定判据的应用。
典型输入信号及拉氏变换、控制系统动态性能指标的定义。
连续一阶控制系统、典型二阶系统的动态性能计算。
控制系统误差与稳态误差的定义,控制系统型号的定义,终值定理法、误差系数法求控制系统的稳态误差,扰动作用下的稳态误差分析,复合控制系统及误差分析。
控制系统的频域性能要求,控制系统校正的概念。
超前校正(滞后校正,滞后—超前校正,PID校正)的概念,校正网络,校正的方法、步骤与效果。
非线性系统描述函数的概念,描述函数法的基本思想与条件,典型非线性特性描述函数的推导,用描述函数法分析非线性系统的自激振荡。
信号的采样与保持,差分方程的概念、微分方程描述的差分化。
Z变换的定义,Z变换基本定理,Z变换的基本方法,Z反变换的部分分式法,控制系统Z传递函数,带有扰动的系统的输出Z变换式。
线性离散系统的稳定性分析。
差分方程的递推解法,差分方程Z变换解法,离散系统极点分布与动态响应的关系。
浙工大自控自控试题B

浙江工业大学2012/2013(1)期终考试《自动控制原理》试题(B )第一部分 简答题(共4题,每题5分,共20分。
答题必须简明扼要。
)1 人闭上眼睛,很难到达预定的目标,试从控制系统的角度进行分析。
2 控制系统开环幅频特性的各个频段分别影响控制系统的那些性能?3 降低控制系统的开环增益,对于闭环控制系统的性能有怎样的影响? 4超前串联校正能够改善系统性能的原因。
第二部分 填空题(共34分)5某最小相位系统的开环对数幅频特性的渐近线如图所示。
该系统的开环传递函数为 。
(5分) 6 图示有源网络的传递函数为 。
(6分) 7某系统在零初始条件下的单位阶跃响应为:6010()10.2 1.2tt c t ee --=+-。
该系统的阻尼比和自然振荡频率分别为 , 。
(每空3分)第5题图o第6题图8 某离散系统及初始状态如下:则该离散系统在初始状态作用下的系统输出响应y(k)为:。
(5分) 9确定图示闭环负反馈系统稳定时参数τ的取值范围 ,在单位斜坡t 、单位加速度2t 作用下系统的稳态误差分别为 , 。
(每空2分)第9题图10 闭环控制系统的开环传递函数分别为如下的表达式,判断相应闭环系统的稳定性。
(请填写稳定、不稳定、临界稳定、或稳定状态无法确定) (每空2分) (1) 210(1)()s G s s +=。
(2) (0.451)()(0.41)(0.51)K s G s s s s +=++,(0K >) 。
(3) 2(21)(1)()(1)K s s G s s Ts ++=+,0,0K T >> 。
第三部分 计算分析和证明题(共3题,共46分。
要求写出详细的解答步骤)(2)3(1)2()0(0)0(1)1y k y k y k y y ++++===11 (本题满分15分)某系统的结构图如图所示,求系统传递函数()/()C s R s 。
第11题图12 (本题满分15分)已知图示负反馈系统中)1(1)(,)1()(21+=+=Ts s s G s s K s G τ 。
2019年《827自动控制原理》研究生入学考试试题

姓名: 报考专业: 准考证号码: 密封线内不要写题年攻读硕士学位研究生入学考试试题科目名称:自动控制原理(█A 卷□B 卷)科目代码:考试时间:3小时 满分150分2019年攻读硕士学位研究生入学考试试题(参考答案)科目名称:自动控制原理(█A 卷□B 卷)科目代码:827考试时间:3小时 满分150分一、简答题(共5小题,每小题6分,共30分):1、对自动控制系统的基本要求是。
答:稳(稳定、平稳)、快(动态响应快)和准(稳态误差小)。
2 线性离散控制系统稳定的充分必要条件是。
答:离散系统闭环特征方程所有的特征根全部位于平面单位圆内部,即z 1, 1,2,i z i n<= 3 函数的拉氏变换和变换分别为。
1()ate t -⎡⎤+⎣⎦z 答:和11s a s ++1aT z zz e z -+--4 某线性定常系统的单位脉冲响应为,则该系统闭环传递函1.25()0.0125t g t e -=数为 。
答:0.01251.25s +5 串联超前校正和滞后校正的主要特点分别是。
答:串联超前校正利用相位超前特性,主要改善系统的动态特性;串联滞后校正利用高频衰减特性,主要改善系统的稳态性能。
二、分析题(15分)简述空调器是如何自动调节室内温度?画出空调器温度自动控制系统的方框图。
解答:空调器控制部分有一个温度自动调节系统,它主要由空调遥控器、温度调节器、制冷压缩电机、温度传感器等部分组成。
以夏季调器运行工作过程为例,用户预先设定一个温度值,启动空调器后,温度传感器实时检测室内温度(通常高于预设温度),并与预设温度进行比较,根据温度偏差,通过温度调节器进行运算处理,并根据运算结果发出控制指令,控制制冷压缩电机运行时间长短,以使室内温度下降,当室内温度接近或等于预设温度时,电机停止工作。
当电机停止工作后,室温会再次回升,类似地由温度传感器实时检测出温度变化,通过温度调节器运算处理后,发出控制指令,启动电机运行,直到室温回到预设温度为止。
浙江工业大学《自控》期末试题及解答2011-12考研复习资料
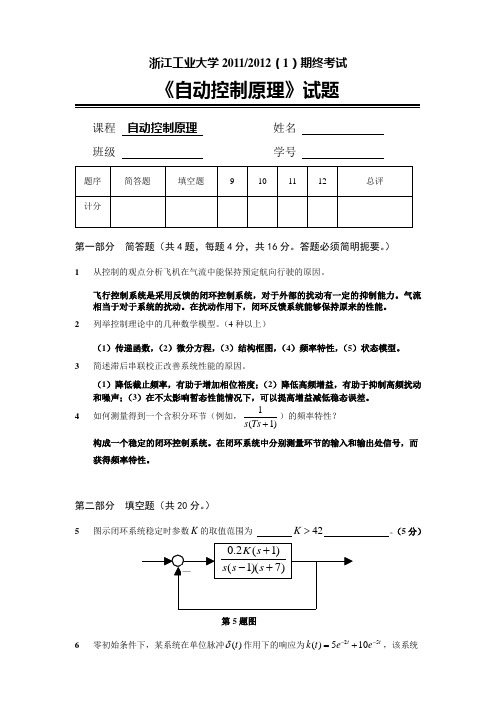
浙江工业大学2011/2012(1)期终考试《自动控制原理》试题课程 自动控制原理 姓名 班级 学号第一部分 简答题(共4题,每题4分,共16分。
答题必须简明扼要。
)1从控制的观点分析飞机在气流中能保持预定航向行驶的原因。
飞行控制系统是采用反馈的闭环控制系统,对于外部的扰动有一定的抑制能力。
气流相当于对于系统的扰动。
在扰动作用下,闭环反馈系统能够保持原来的性能。
2列举控制理论中的几种数学模型。
(4种以上)(1)传递函数,(2)微分方程,(3)结构框图,(4)频率特性,(5)状态模型。
3简述滞后串联校正改善系统性能的原因。
(1)降低截止频率,有助于增加相位裕度;(2)降低高频增益,有助于抑制高频扰动和噪声;(3)在不太影响暂态性能情况下,可以提高增益减低稳态误差。
4如何测量得到一个含积分环节(例如,1(1)s Ts +)的频率特性?构成一个稳定的闭环控制系统。
在闭环系统中分别测量环节的输入和输出处信号,而获得频率特性。
第二部分 填空题(共20分。
)5图示闭环系统稳定时参数K 的取值范围为 42>K 。
(5分)第5题图6零初始条件下,某系统在单位脉冲()t δ作用下的响应为25()510tt k t ee --=+,该系统的输入输出间的传递函数为21545710s s s +++ ,该系统输入()u t 与输出()y t 间的微分方程为 ()7()10()15()45()y t y t y t u t u t ++=+。
(每空2分) 7已知单位负反馈系统的开环传递函数为(1)()()(21)(31)K s G s H s s s s +=++,0,K >在单位阶跃1()t 、单位斜坡t 、单位加速度2t 作用下系统的稳态误差分别为 0 , 1/K , 无穷大 。
(每空2分) 8某离散系统及初始状态如下:则该离散系统在初始状态作用下的系统输出响应y(k)为:。
(5分)第三部分 计算分析和证明题(共4题,共64分。
自控原理试卷及答案浙江工业大学3
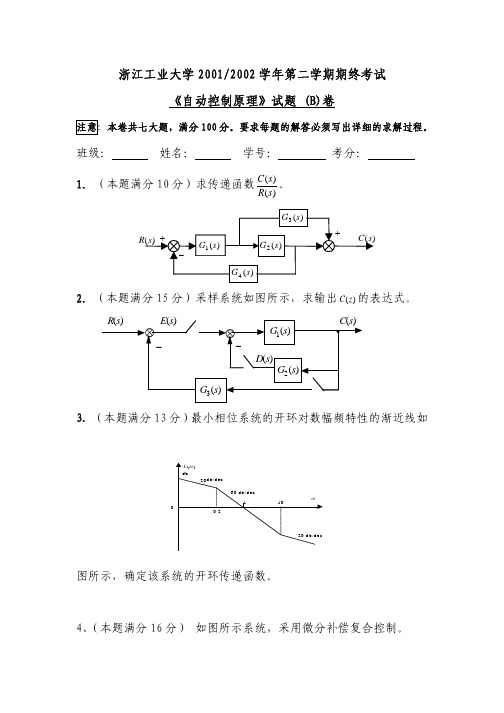
浙江工业大学2001/2002学年第二学期期终考试《自动控制原理》试题 (B)卷注意:本卷共七大题,满分100分。
要求每题的解答必须写出详细的求解过程。
班级: 姓名: 学号: 考分: 1. (本题满分10分)求传递函数)()(s R s C 。
2. (本题满分15分)采样系统如图所示,求输出)(z C 的表达式。
3. (本题满分13分)最小相位系统的开环对数幅频特性的渐近线如图所示,确定该系统的开环传递函数。
4、(本题满分16分) 如图所示系统,采用微分补偿复合控制。
当输入t t r =)(时,要求系统稳态误差的终值为0,试确定参数d τ的值。
R5、(本题满分15分) 已知系统的单位阶跃响应为t t e e t c 10602.12.01)(−−−+=,试求: (1)系统的单位脉冲响应;(2)系统的阻尼比ς和自然振荡频率n ω,最大超调量及上升时间。
6.(本题满分16分)已知负反馈系统的开环传递函数为)1()1)(12()()(2+++=Ts s s s K s H s G , 0,0>>T K(1) 确定当闭环系统稳定时,K T ,应满足的条件。
(2) 分别计算在单位跃阶、单位斜坡、单位加速度信号作用下的稳态误差。
7、(本题满分15 分)系统的方框图如图所示,设T0=1 (采样周期也为T0), a=1, k=10, (1) 求闭环z 传递函数 (2) 试分析系统的稳定性。
浙江工业大学2001/2002学年第二学期期终考试《自动控制原理》试题解答1、)()()()()()()()()()(1)()()()()()(s D s C s B s A s D s C s C s B s B s A s D s C s B s A s R s Y ++++=2、)()(11)()( ,)()(1)()()(21211z G z G z R z E z G z G z G z R z C +=+= 3、系统的开环传递函数为: 22)51()1.01(25)()(s s s s H s G ++=开环传递函数的Nyquist 图(草图)为: 闭环系统不稳定。