最新图像几何变换程序
如何进行卫星图像的几何校正

如何进行卫星图像的几何校正随着卫星遥感技术的快速发展,卫星图像已经成为获取地面信息的重要手段之一。
然而,由于卫星在拍摄图像时存在姿态变化、地球曲率等因素,卫星图像常常出现几何形变的问题。
为了准确分析和处理卫星图像,必须进行几何校正。
本文将介绍如何进行卫星图像的几何校正。
几何校正是将卫星图像的像素坐标转换为地理坐标的过程,主要包括图像配准、坐标变换和投影变换三个步骤。
首先,进行图像配准。
图像配准是指将待校正图像的像素位置与一个参考图像的像素位置进行匹配。
常用的方法包括特征点匹配和相关系数匹配。
特征点匹配是根据图像中的特征点(如角点、边缘等)来寻找相应特征点,并通过计算特征点之间的距离、角度等关系来确定图像间的变换模型。
相关系数匹配是通过计算图像间的灰度相关性来确定图像变换模型。
图像配准完成后,接下来是进行坐标变换。
坐标变换是将待校正图像的像素坐标转换为地球坐标,常见的坐标变换方法有仿射变换和多项式变换。
仿射变换是利用线性变换将图像中的像素坐标转换为地理坐标,通常采用最小二乘法估计变换参数。
多项式变换则是通过多项式函数描述像素坐标与地理坐标之间的关系,可以更精确地描述图像的几何变换关系。
最后,进行投影变换。
投影变换是将待校正图像从像素坐标系转换为地理坐标系的过程。
在进行投影变换时,需要选择合适的地图投影方法。
常见的地图投影方法有经纬度投影、UTM投影、Lambert投影等。
选择合适的地图投影方法能够保持图像的几何形状和相对位置关系,提高后续分析和处理的准确性。
除了以上三个步骤,还需要注意一些细节问题。
首先,要根据卫星的姿态参数进行几何校正。
卫星在拍摄图像时会出现姿态的变化,所以需要根据实际的姿态参数对图像进行矫正。
其次,要考虑地球曲率的影响。
由于地球并非平面,图像中的像素在地面上的位置会发生畸变,所以需要考虑地球曲率对图像的影响,进行相应的几何变换。
在进行卫星图像的几何校正时,还需要注意一些常见的问题。
实验报告几何变换实验

实验报告几何变换实验实验报告:几何变换实验引言:几何变换是计算机图形学中的重要概念,它可以改变图像的形状、位置和大小。
在本次实验中,我们将通过对几何变换的实际操作,深入了解几何变换的原理和应用。
一、实验目的本次实验的主要目的是探究几何变换在图像处理中的应用,具体包括平移、旋转、缩放和翻转等几何变换操作。
通过实际操作和观察,我们将了解几何变换对图像的影响,并学习如何使用计算机编程实现这些变换。
二、实验材料和方法1. 实验材料:- 一台计算机- 图像处理软件(如Photoshop、GIMP等)- 编程软件(如Python、MATLAB等)2. 实验方法:- 步骤一:选择一张图片作为实验对象,并导入到图像处理软件中。
- 步骤二:使用图像处理软件进行平移操作,观察图像的位置变化。
- 步骤三:使用图像处理软件进行旋转操作,观察图像的旋转效果。
- 步骤四:使用图像处理软件进行缩放操作,观察图像的大小变化。
- 步骤五:使用图像处理软件进行翻转操作,观察图像的翻转效果。
- 步骤六:使用编程软件编写程序,实现上述几何变换操作,并观察结果。
三、实验结果与分析1. 平移操作:在实验中,我们发现通过平移操作,可以将图像在水平和垂直方向上进行移动。
通过调整平移的距离和方向,我们可以改变图像在画布上的位置。
这种操作常用于图像的对齐和拼接等应用中。
2. 旋转操作:旋转操作可以改变图像的角度和方向。
通过调整旋转的角度和中心点,我们可以使图像以不同的角度进行旋转。
这种操作常用于图像的矫正、仿射变换等应用中。
3. 缩放操作:缩放操作可以改变图像的大小。
通过调整缩放的比例,我们可以使图像变得更大或更小。
这种操作常用于图像的放大、缩小、裁剪等应用中。
4. 翻转操作:翻转操作可以改变图像的方向。
通过水平或垂直翻转,我们可以使图像在左右或上下方向发生镜像反转。
这种操作常用于图像的镜像处理、对称效果等应用中。
四、实验总结通过本次实验,我们深入了解了几何变换在图像处理中的应用。
halcon 几何变换

halcon 几何变换
Halcon是一款用于机器视觉应用开发的软件库,其几何变换功能可以用来对图像进行平移、旋转、缩放和仿射等变换操作。
在Halcon中,可以使用以下函数来实现几何变换:
1. affine_trans_image():用于对图像进行仿射变换,可以通过指定仿射矩阵来进行旋转、平移、缩放和错切等变换操作。
2. hom_mat3d_translate():用于对3D图像进行平移变换,可以通过指定平移向量来实现。
3. hom_mat3d_rotate():用于对3D图像进行旋转变换,可以通过指定旋转轴和旋转角度来实现。
4. projective_trans_image():用于对图像进行透视变换,可以通过指定透视矩阵来实现。
5. hom_mat2d_identity():用于创建2D仿射变换的单位矩阵,可以用来初始化变换矩阵。
这些函数可以在Halcon的开发环境中使用,详细的使用方法和参数说明可以参考Halcon的官
方文档。
数字图像处理---图像的几何变换

数字图像处理---图像的⼏何变换图像的⼏何变换图像的⼏何变换包括了图像的形状变换和图像的位置变换图像的形状变换图像的形状变换是指图像的放⼤、缩⼩与错切图像缩⼩图像的缩⼩是对原有的数据进⾏挑选或处理,获得期望缩⼩尺⼨的数据,并尽量保持原有的特征不消失分为按⽐例缩⼩和不按⽐例缩⼩两种最简单的⽅法是等间隔地选取数据图像缩⼩实现设原图像⼤⼩为M ∗N ,缩⼩为K 1M ∗K 2N (K 1<1,K 2<1)1. 设原图为F (i ,j ),i =1,2,...,M ,j =1,2,...,N ;压缩后地图像为G (x ,y ),x =1,2,...,k 1M ,y =1,2,...,k 2N2. G (x ,y )=F (c 1∗i ,c 2∗j );其中,c 1=1/k 1,c 2=1/k 2图像放⼤图像放⼤时对多出的空位填⼊适当的值,是信息的估计最简单的思想是将原图像中的每个像素放⼤为k ∗k 的⼦块图像放⼤实现设原图像⼤⼩为M ∗N ,缩⼩为K 1M ∗K 2N (K 1>1,K 2>1)1. 设原图为F (i ,j ),i =1,2,...,M ,j =1,2,...,N ;压缩后地图像为G (x ,y ),x =1,2,...,k 1M ,y =1,2,...,k 2N2. G (x ,y )=F (c 1∗i ,c 2∗j );其中,c 1=1/k 1,c 2=1/k 2图像错切图像错切变换实际上是平⾯景物在投影平⾯上的⾮垂直投影效果图像错切的数学模型x ′=x +d x y y ′=y(x ⽅向的错切,dx =tan θ)x ′=x y ′=y +d y x(y ⽅向的错切,dy =tan θ)图像的位置变换图像的位置变换是指图像的平移、镜像与旋转,即图像的⼤⼩和形状不发⽣变化主要⽤于⽬标识别中的⽬标配准图像平移公式:{{x ′=x +Δx y ′=y +Δy图像镜像图像镜像分为⽔平镜像和垂直镜像,即左右颠倒和上下颠倒公式:图像⼤⼩为M*Nx ′=x y ′=−y (⽔平镜像)x ′=−x y ′=y(垂直镜像)由于不能为负,因此需要再进⾏⼀次平移x ′=x y ′=N +1−y (⽔平镜像)x ′=M +1−xy ′=y(垂直镜像)图像旋转公式:x ′=xcos θ−ysin θy ′=xsin θ+ycos θ由于计算结果值所在范围与原有值不同,因此需要在进⾏扩⼤画布、取整、平移等处理画布扩⼤原则:以最⼩的⾯积承载全部的画⾯信息⽅法:根据公式x ′=xcos θ−ysin θy ′=xsin θ+ycos θ计算x ′min ,x ′max ,y ′min ,y ′max旋转后可能导致像素之间相邻连接不再连续,因此需要通过增加分辨率的⽅式填充空洞插值最简单的⽅式就是⾏插值(列插值)⽅法1. 找出当前⾏的最⼩和最⼤的⾮背景点坐标,记作:(i,k1)、(i,k2)2. 在(k1,k2)范围内进⾏插值,插值⽅法为空点的像素值等于前⼀点的像素值3. 重复上述操作直⾄没有空洞图像的仿射变换图像的仿射变换即通过通⽤的仿射变换公式,表⽰⼏何变换{{{{{{{齐次坐标原坐标为(x,y),定义齐次坐标为(wx,wy,w)实质上是通过增加坐标量来解决问题仿射变换通式通过齐次坐标定义仿射变换通式为x ′=ax +by +Δx y ′=cx +dy +Δy⇒x ′y ′=a b Δx c dΔyx y⼏何变换表⽰1. 平移x ′y ′1=10Δx 01Δy 001x y12. 旋转x ′y ′1=cos θ−sin θ0sin θcos θ0001x y 13. ⽔平镜像x ′y ′1=−10001001x y14. 垂直镜像x ′y ′1=1000−10001x y15. 垂直错切x ′y ′1=1d x 00−10001x y16. ⽔平错切x ′y ′1=100d y −10001x y1图像的⼏何校正由于图像成像系统的问题,导致拍摄的图⽚存在⼀定的⼏何失真⼏何失真分为{[][][][][][][][][][][][][][][][][][][][][]1. 系统失真:有规律的、可预测的2. ⾮系统失真:随机的⼏何校正的基本⽅法是先建⽴⼏何校正的数学模型,其次利⽤已知条件确定模型参数,最后根据模型对图像进⾏⼏何校正步骤:1. 图像空间坐标的变换2. 确定校正空间各像素的灰度值(灰度内插)途径:1. 根据畸变原因,建⽴数学模型2. 参考点校正法,根据⾜够多的参考点推算全图变形函数空间坐标变换实际⼯作中利⽤⼀幅基准图像f(x,y),来校正失真图像g(x′,y′)根据⼀些控制点对,建⽴两幅图像之间的函数关系,通过坐标变换,以实现失真图像的⼏何校正两幅图像上的f(x,y)=g(x′,y′)时,称其为对应像素(同名像素)通过表达式x′=h1(x,y)y′=h2(x,y)表⽰两幅图像之间的函数关系通常⽤多项式x′=n∑i=0n−i∑j=0a ij x i y jy′=n∑i=0n−i∑j=0b ij x i y j来近似h1(x,y)、h2(x,y)当多项式系数n=1时,畸变关系为线性变换x′=a00+a10x+a01yy′=b00+b10x+b01y六个未知数需要⾄少三个已知点来建⽴⽅程式当多项式系数n=2时,畸变关系式为x′=a00+a10x+a01y+a20x2+a11xy+a02y2y′=b00+b10x+b01y+b20x2+b11xy+b02y2 12个未知数需要⾄少6个已知点来建⽴⽅程式当超过已知点数⽬超过要求时,通过最⼩⼆乘法求解n=2时多项式通式为B2∗n=H2∗6A6∗n(n为待求点数)B2∗n=x′1x′2⋯x′n y′1y′2⋯y′n{ []H 2∗6=a 00a 10a 01a 20a 11a 02b 00b 10b 01b 20b 11b 02A 6∗n =11⋯1x 1x 2⋯x n y 1y 2⋯y n x 21x 22⋯x 2n x 1y 1x 2y 2⋯x n y ny 21y 22⋯y 2n同名点对要求1. 数量多且分散2. 优先选择特征点直接法利⽤已知点坐标,根据x ′=h 1(x ,y )y ′=h 2(x ,y )⇒x =h ′1(x ′,y ′)y =h ′2(x ′,y ′)x =n ∑i =0n −i∑j =0a ′ij x ′i y′jy =n ∑i =0n −i∑j =0b ′ijx ′i y ′j解求未知参数;然后从畸变图像出发,根据上述关系依次计算每个像素的校正坐标,同时把像素灰度值赋予对应像素,⽣成校正图像由于像素分布的不规则,导致出现像素挤压、疏密不均等现象,因此最后还需要进⾏灰度内插,⽣成规则图像间接法间接法通过假定⽣成图像的⽹格交叉点,从⽹格交叉点(x,y)出发,借助已知点求取未知参数,根据x ′=n ∑i =0n −i∑j =0a ij x i y jy ′=n ∑i =0n −i∑j =0b ij x i y j推算⽹格交叉点(x,y)对应畸变图像坐标(x',y'),由于对应坐标⼀般不为整数,因此需要通过畸变图像坐标周围点的灰度值内插求解,作为⽹格交叉点(x,y)的灰度值间接法相对直接法内插较为简单,因此常采⽤间接法作为⼏何校正⽅法像素灰度内插最近邻元法最近邻元法即根据四邻域中最近的相邻像素灰度决定待定点灰度值该⽅法效果较佳,算法简单,但是校正后图像存在明显锯齿,即存在灰度不连续性双线性内插法[][]{{双线性内插法是利⽤待求点四个邻像素的灰度在两个⽅向上作线性内插该⽅法相较最近邻元法更复杂,计算量更⼤,但是没有灰度不连续的缺点,且具有低通滤波性质,图像轮廓较为模糊三次内插法三次内插法利⽤三次多项式S(x)来逼近理论最佳插值函数sin(x)/xS(x)=1−2|x|2+|x|30≤|x|<1 4−8|x|+5|x|2−|x|31≤|x|<20|x|≥2该算法计算量最⼤,但是内插效果最好,精度最⾼{Processing math: 100%。
如何利用计算机视觉技术进行图像几何校正与变换
如何利用计算机视觉技术进行图像几何校正与变换计算机视觉技术在现代的图像处理领域扮演着至关重要的角色。
其中,图像几何校正与变换是一项重要的任务。
本文将介绍如何利用计算机视觉技术进行图像几何校正与变换的方法和应用。
图像几何校正与变换是指通过计算机算法对图像进行形变、旋转、缩放等操作,使得图像获得更好的视觉效果或满足特定应用需求。
在许多领域中,如计算机游戏、虚拟现实、医学影像分析等,图像几何校正与变换都是十分常见的任务。
首先,为了进行图像几何校正与变换,我们需要了解图像的几何属性。
图像由像素组成,每个像素都有其坐标,通常用x和y表示。
通过控制像素的坐标,我们可以对图像进行各种几何变换。
常见的几何变换包括平移、旋转、缩放和扭曲等。
平移是指将图像沿着x和y轴的正负方向上移动一定的距离。
这种变换可以用以下公式表示:x' = x + dxy' = y + dy其中,(x, y)是原始图像中的坐标,(x', y')是经过平移后的坐标,(dx, dy)是平移的距离。
旋转是指围绕某一点将图像按一定角度旋转。
这种变换可以用以下公式表示:x' = x * cos(theta) - y * sin(theta)y' = x * sin(theta) + y * cos(theta)其中,(x, y)是原始图像中的坐标,(x', y')是经过旋转后的坐标,theta是旋转的角度。
缩放是指按一定比例改变图像的大小。
这种变换可以用以下公式表示:x' = x * sxy' = y * sy其中,(x, y)是原始图像中的坐标,(x', y')是经过缩放后的坐标,sx和sy分别是沿x和y轴的缩放比例。
扭曲是指改变图像中不同点的位置关系,使得某些直线或曲线变形。
扭曲变换的具体形式通常由一组控制点或者曲线参数定义。
基于这些几何变换的基本原理,计算机视觉技术提供了多种方法来实现图像几何校正与变换。
数字图像处理课件第6章图像的几何变换

x Hx H
y Hy H
第6章 图像的几何变换
齐次坐标的几何意义相当于点(x, y)落在3D空间H=1
的平面上,如图6-2所示。如果将xOy平面内的三角形abc的 各顶点表示成齐次坐标(xi, yi, 1)(i=1, 2, 3)的形式,就变成H =1平面内的三角形a1b1c1的各顶点。
图6-2 齐次坐标的几何意义
第6章 图像的几何变换
齐次坐标在2D图像几何变换中的另一个应用是:如某 点S(60 000,40 000)在16位计算机上表示,由于大于32767 的最大坐标值,需要进行复杂的处理操作。但如果把S的坐 标形式变成(Hx, Hy, H)形式的齐次坐标,则情况就不同了。 在齐次坐标系中,设H=1/2,则S(60 000,40 000)的齐次坐 标为(x/2,y/2,1/2),那么所要表示的点变为(30 000, 20 000,1/2),此点显然在16位计算机上二进制数所能表示 的范围之内。
(图像上各点的新齐次坐标)
(图像上各点的原齐次坐标)
第6章 图像的几何变换 设变换矩阵T为
a b p
T c
d
q
l m s
则上述变换可以用公式表示为
=
T
Hx1' Hy1'
Hx2' Hy2'
Hxn' Hyn'
x1 x2 xn
T
y1
y2
yn
H H H 3n
1 1 1 3n
第6章 图像的几何变换
6.4 图像镜像
6.4.1 图像镜像变换 图像的镜像(Mirror)变换不改变图像的形状。 镜像变换分为两种:一种是水平镜像,另外一种是垂直镜
Adobe Photoshop软件中的几何和变换工具教程
Adobe Photoshop软件中的几何和变换工具教程Adobe Photoshop是一款功能强大的图像处理软件,其中包含了许多实用的工具和功能。
本文将主要介绍Photoshop中的几何和变换工具,帮助读者快速掌握这些实用工具的使用方法。
一、缩放工具缩放工具是Photoshop中常用的一种几何工具,它可以调整图像的大小,使得图像变大或变小。
你可以通过按住键盘上的“Ctrl”键并拖动鼠标来使用缩放工具。
在使用缩放工具之前,记得先选中你要调整大小的图层。
此外,你还可以通过点击菜单栏的“编辑”选项,选择“变换”-“缩放”来进行图像缩放。
二、旋转工具旋转工具是另一种常用的几何工具,它可以将图像按照指定的角度进行旋转。
你可以通过按住键盘上的“Ctrl”键并拖动鼠标来使用旋转工具。
同样地,在使用旋转工具之前,需要先选中你要操作的图层。
除此之外,你还可以通过点击菜单栏的“编辑”选项,选择“变换”-“旋转”来进行图像旋转。
三、平移工具平移工具可以帮助你将图像在画布中进行移动,让图像的位置发生改变。
你可以通过直接在画布上点击并拖动图像来使用平移工具,也可以按下键盘上的“V”键来切换到平移工具。
同样地,在使用平移工具之前,需要选中你要操作的图层。
如果需要更精确地移动图像,你可以使用菜单栏中的“编辑”选项,选择“变换”-“平移”。
四、变形工具变形工具是一个十分有用的工具,它可以将图像进行扭曲、拉伸、收缩等变形操作。
你可以通过点击菜单栏的“编辑”选项,选择“变换”-“变形”来使用变形工具。
使用变形工具后,你会看到一系列的控制点,通过拖动这些控制点可以对图像进行各种变形操作。
变形工具可以帮助你创建出各种独特的效果,非常有趣。
五、扭曲工具扭曲工具类似于变形工具,可以对图像进行扭曲操作,但它相对更加细致。
你可以通过点击菜单栏的“编辑”选项,选择“变换”-“扭曲”来使用扭曲工具。
使用扭曲工具后,你会看到一系列的网格线和控制点,通过拖动这些控制点可以对图像进行局部扭曲。
vtk相机的几何变换

vtk相机的几何变换VTK(Visualization Toolkit)是一个用于处理、呈现和操作3D计算机图形、图像和数据的开源软件系统。
在VTK中,相机是一个重要的对象,它可以通过几何变换来实现各种视觉效果。
相机的几何变换通常包括平移(Translation)、旋转(Rotation)和缩放(Scaling)。
这些变换可以通过VTK中的变换矩阵来实现。
变换矩阵是4x4的齐次矩阵,可以表示平移、旋转和缩放等操作。
下面是一个示例代码,展示了如何使用VTK中的变换矩阵来实现相机的几何变换:python复制代码import vtk# 创建一个相机对象camera = vtk.vtkCamera()# 设置相机的位置、方向和视角camera.SetPosition(0, 0, 3)camera.SetFocalPoint(0, 0, 0)camera.SetViewUp(0, 1, 0)camera.SetViewAngle(30)# 创建一个变换矩阵对象transform = vtk.vtkTransform()# 平移变换transform.Translate(1.0, 2.0, 0.5)camera.SetPosition(camera.GetPosition() * transform.GetMatrix())# 旋转变换transform.RotateWXYZ(45, 0, 1, 0) # 绕y轴旋转45度camera.SetFocalPoint(camera.GetFocalPoint() *transform.GetMatrix())camera.SetViewUp(camera.GetViewUp() * transform.GetMatrix())# 缩放变换transform.Scale(0.5, 0.5, 1) # 沿x轴和y轴缩放50%camera.SetPosition(camera.GetPosition() * transform.GetMatrix()) camera.SetFocalPoint(camera.GetFocalPoint() *transform.GetMatrix())# 将变换应用到相机上camera.SetUserTransform(transform)在上面的示例中,我们首先创建了一个相机对象,并设置了相机的位置、方向和视角。
数字图像的基本变换程序设计几何变换
摘要数字图像几何变换是计算机图像处理领域中的一个重要组成部分,也是值得探讨的一个重要课题在图像几何变换中主要包括图像的缩放、图像的旋转、图像的移动、图像的剪取等容。
文章主要探讨了数字图像的几何变换(包括图像的平移、图像的裁剪、图像的缩放、图像的旋转以及扭曲变换和镜像变换)理论,并在此基础上以MATLAB为工具,以最近邻插法、双线性插值法和双三次插值法三种常用数字图像差值算法为基础,实现了数字图像的一系列几何变换。
关键词:图像几何变换;缩放;旋转;扭曲变换;镜像变换1 引言 01.1 课程设计的目的 01.2 课程设计的任务 01.3 课程设计的要求与容 (1)2系统总体设计 (2)2.1 数字图像几何变换及原理 (2)2.2 设计方案 (6)3 系统设计与实现 (7)3.1 设计容 (7)3.2 系统模块流程图 (8)3.2.1 平移和裁剪变换 (8)3.2.2 扭曲变换 (8)3.2.3 镜像变换 (9)3.2.4 缩放和旋转变换 (9)3.3 Matlab程序实现代码 (10)3.3.1 平移和裁剪变换 (10)3.3.2 扭曲变换 (11)3.3.3 镜像变换 (11)3.3.4 缩放和旋转变换 (12)4 系统仿真与结果分析 (13)4.1 系统仿真 (13)4.2 结果分析 (20)5 结论 (21)6 参考文献 (22)近几年来,由于大规模集成电路技术和计算机技术的迅猛发展、离散数学理论的创立和完善,数字图像处理技术正逐渐成为其他科学技术领域中不可缺少的一项重要工具。
数字图像技术也从空间探索到微观研究、从军事领域到农业生产、从科学教育到娱乐游戏等越来越多的领域得到广泛应用。
无形之中成为了现代不可或缺的处理技术。
通过课程设计实现对其的认知度以及更深入的学习和运用它。
1.1 课程设计的目的数字图像处理课程设计作为独立的教学环节,是通信技术及相关专业的集中实践环节之一,是学习完《数字图像处理》课程后,进行的一次综合练习。
数字图像处理实验06图像的几何变换
一、数字图像处理实验实验六 图像的几何变换一、实验目的学习和掌握图像几何空间变换和灰度插值的基本方法,对图像进行相应的几何变换操作。
二、实验内容1.编程实现图像的比例缩放。
2. 编程实现图像任意角度的旋转变换。
3. 分别用MATLAB 函数提供的三种插值方法实现图像的缩放和旋转。
三、实验原理图像的几何变换可以看成是像素在图像内的移动过程,该移动过程可以改变图像中物体对象(像素)之间的空间关系。
完整的几何运算需要由两个算法来实现:空间变换算法和灰度插值算法。
空间变换主要用来保持图像中曲线的连续性和物体的连通性,一般都采用数学函数形式来描述输入、输出图像相应像素间的空间关系。
空间变换一般定义为)],(),,([),(),(y x b y x a f y x f y x g =′′= (6.1)其中,f 表示输入图像,g 表示输出图像,坐标),(y x ′′指的是空间变换后的坐标,要注意这时的坐标已经不是原来的坐标),(y x 了,),(y x a 和),(y x b 分别是图像的x 和y 坐标的空间变换函数。
灰度级插值主要是对空间变换后的像素赋予灰度值,使之恢复原位置处的灰度值,在几何运算中,灰度级插值是必不可少的组成部分。
因为图像一般用整数位置处的像素来定义。
而在几何变换中,),(y x g 的灰度值一般由处在非整数坐标上的),(y x f 的值来确定,即g 中的一个像素一般对应于f 中的几个像素之间的位置,反过来看也是一样,即f 中的一个像素往往被映射到g 中的几个像素之间的位置。
下面介绍图像几何变换常用的方法。
1. 图像的缩放假设图像x 轴方向缩放比例fx ,y 轴方向缩放比例是fy ,那么原图中点),(00y x 对应于新图中的点),(11y x 的转换矩阵为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡1100000010011y x f f y x y x (6.2) 其逆运算如下: ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡1100010********y x f f y x y x (6.3) 即: ⎩⎨⎧+=+=]5.0[]5.0[1010y x f y y f x x (6.4) 中括号表示对表达式取整。
opencv python 几何中心 距离变换
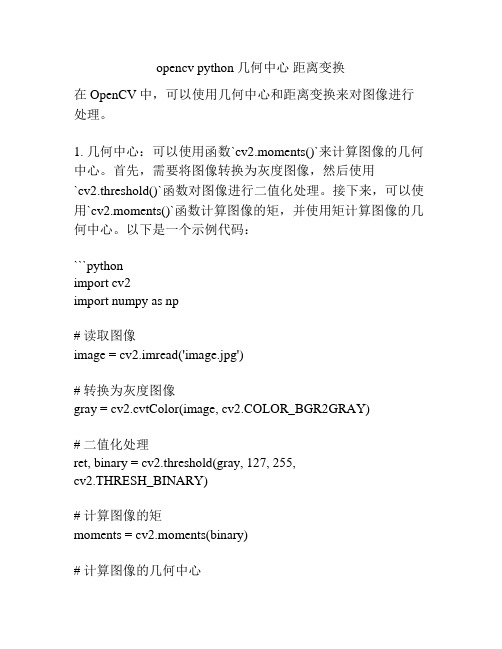
opencv python 几何中心距离变换在OpenCV中,可以使用几何中心和距离变换来对图像进行处理。
1. 几何中心:可以使用函数`cv2.moments()`来计算图像的几何中心。
首先,需要将图像转换为灰度图像,然后使用`cv2.threshold()`函数对图像进行二值化处理。
接下来,可以使用`cv2.moments()`函数计算图像的矩,并使用矩计算图像的几何中心。
以下是一个示例代码:```pythonimport cv2import numpy as np# 读取图像image = cv2.imread('image.jpg')# 转换为灰度图像gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 二值化处理ret, binary = cv2.threshold(gray, 127, 255,cv2.THRESH_BINARY)# 计算图像的矩moments = cv2.moments(binary)# 计算图像的几何中心cX = int(moments["m10"] / moments["m00"])cY = int(moments["m01"] / moments["m00"])# 在图像上标出几何中心cv2.circle(image, (cX, cY), 5, (0, 255, 0), -1)# 显示图像cv2.imshow('image', image)cv2.waitKey(0)cv2.destroyAllWindows()```2. 距离变换:可以使用函数`cv2.distanceTransform()`来进行距离变换。
首先,将图像转换为灰度图像,并对图像进行二值化处理。
然后,可以使用`cv2.distanceTransform()`函数计算图像中每个像素距离最近的背景像素的距离。
计算机图形学---图形几何变换的实现

实验五图形几何变换的实现班级 08信计2班学号 20080502057 姓名冯双捷分数一.实验目的和要求1.掌握二维、三维图形基本变换的变换原理;2.利用TurboC实现二维、三维图形的基本变换和符合变换3.屏幕显示变换过程和变换结果。
二.实验内容1.原程序实现二维图形(直线)的平移变换;=±(1)沿x轴的平移公式:'x x r=±(2)沿y轴的平移公式:'y y s2.源程序实现三维图形(立方体)的旋转变换和比例变换。
(1)旋转变换即图形围绕圆心逆时针旋转一定的角度;(2)比例变换即对象距圆点的距离按照一定比例进行变换。
三.实验结果分析1.二维平移程序代码#include <stdio.h>#include <graphics.h>#include <conio.h>int initjuzhen(m)int m[3][3];{int i,j;for(i=0;i<3;i++)for(j=0;j<3;j++)m[i][j]=0;for(i=0;i<3;i++)m[i][i]=1;}main(){int x0,y0,x1,y1,i,j;int a[3][3];char key;int graphdriver=DETECT;int graphmode=0;initgraph(&graphdriver,&graphmode," ");cleardevice();setcolor(2);x0=250;y0=120;x1=350;y1=220;line(x0,y0,x1,y1);for(;;){outtextxy(100,400,"<-:left ->:right^:up v:down Esc->exit");key=getch();initjuzhen(a);switch(key){case 75:a[2][0]=-10;break;case 77:a[2][0]=10;break;case 72:a[2][1]=-10;break;case 80:a[2][1]=10;break;case 27:exit();break;}x0=x0*a[0][0]+y0*a[1][0]+a[2][0];y0=x0*a[0][1]+y0*a[1][1]+a[2][1];x1=x1*a[0][0]+y1*a[1][0]+a[2][0];y1=x1*a[0][1]+y1*a[1][1]+a[2][1];clearviewport();line(x0,y0,x1,y1);}closegraph();}运行结果见文件夹:ERWEI2.三维图形旋转转换,比例变换程序代码:#include <stdio.h>#include <math.h>#include <graphics.h>#include <conio.h>#include <time.h>#include <ctype.h>#define ZOOM_IN 0.9#define ZOOM_OUT 1.1int turn1[3];typedef struct{float x;float y;float z;}point;typedef struct{float x;float y;}point2d;typedef struct{float x;float y;float h;point biao[8];}fanti;void make_box(float x,float y,float h,fanti *p) {p->x=x;p->y=y;p->h=h;p->biao[0].x=x/2;p->biao[0].y=y/2;p->biao[0].z=h/2;p->biao[1].x=-x/2;p->biao[1].y=y/2;p->biao[1].z=h/2;p->biao[2].x=-x/2;p->biao[2].y=-y/2;p->biao[2].z=h/2;p->biao[3].x=x/2;p->biao[3].y=-y/2;p->biao[3].z=h/2;p->biao[4].x=x/2;p->biao[4].y=y/2;p->biao[4].z=-h/2;p->biao[5].x=-x/2;p->biao[5].y=y/2;p->biao[5].z=-h/2;p->biao[6].x=-x/2;p->biao[6].y=-y/2;p->biao[6].z=-h/2;p->biao[7].x=x/2;p->biao[7].y=-y/2;p->biao[7].z=-h/2;}void turn2d(point *p,point2d *q){q->x=p->x+p->z*cos(0.25);q->y=p->y+p->z*sin(0.25);}void initm(float mat[][4]){int count;for(count=0;count<4;count++){mat[count][0]=0.;mat[count][1]=0.;mat[count][2]=0.;mat[count][3]=0.;mat[count][count]=1.;}return;}void transform(point *p,point *q,float tm[][4]){float xu,yv,zw,h;xu=tm[0][0]*p->x+tm[1][0]*p->y+tm[2][0]*p->z+tm[3][0];yv=tm[0][1]*p->x+tm[1][1]*p->y+tm[2][1]*p->z+tm[3][1];zw=tm[0][2]*p->x+tm[1][2]*p->y+tm[2][2]*p->z+tm[3][2];p->x=xu;p->y=yv;p->z=zw;return;}void rotationx(point *p,float alfa,float tm[][4]){float rad=0.0174532925;initm(tm);tm[1][1]=cos(rad*alfa);tm[1][2]=sin(rad*alfa);tm[2][1]=-tm[1][2];tm[2][2]=tm[1][1];return;}void rotationz(point *p,float alfa,float tm[][4]){float rad=0.0174532925;initm(tm);tm[0][0]=cos(rad*alfa);tm[0][1]=sin(rad*alfa);tm[1][0]=-tm[0][1];tm[1][1]=tm[0][0];return;}void rotationy(point *p,float alfa,float tm[][4]) {float rad=0.0174532925;initm(tm);tm[0][0]=cos(rad*alfa);tm[2][0]=sin(rad*alfa);tm[0][2]=-tm[2][0];tm[2][2]=tm[0][0];return;}void adjust(point *p,point *q){float t[4][4];switch(turn1[0]){case 1:rotationy(p,2,t);transform(p,q,t);break;case -1:rotationy(p,-2,t);transform(p,q,t);break;default:break;}switch(turn1[1]){case 1:rotationz(p,2,t);transform(p,q,t);break;case -1:rotationz(p,-2,t);transform(p,q,t);break;default:break;}switch(turn1[2]){case 1:q->x=ZOOM_IN*p->x;q->y=ZOOM_IN*p->y;q->z=ZOOM_IN*p->z;break;case -1:q->x=ZOOM_OUT*p->x;q->y=ZOOM_OUT*p->y;q->z=ZOOM_OUT*p->z;break;default:break;}}void drawbox(fanti *p){point2d fan2d[8];int i;for(i=0;i<=7;i++){adjust(&p->biao[i],&p->biao[i]);turn2d(&p->biao[i],&fan2d[i]);fan2d[i].x+=300;fan2d[i].y+=200;}clearviewport();setcolor(2);outtext("\n ->:right\n <-:left\n ^:up\n v:down");moveto(0,10);outtext("\n page up:zoom in\n page down:zoom out\n space:Redraw\n Esc:exit");for(i=0;i<=3;i++){if(i==3){line(fan2d[i].x,fan2d[i].y,fan2d[0].x,fan2d[0].y);line(fan2d[i+4].x,fan2d[i+4].y,fan2d[4].x,fan2d[4].y);}else{line(fan2d[i].x,fan2d[i].y,fan2d[i+1].x,fan2d[i+1].y);line(fan2d[i+4].x,fan2d[i+4].y,fan2d[i+5].x,fan2d[i+5].y);}line(fan2d[i].x,fan2d[i].y,fan2d[i+4].x,fan2d[i+4].y);}}void main(){int gd=DETECT,gm,i,j;char key;float x,y,h;fanti a1;x=100;y=100;h=100;initgraph(&gd,&gm," ");make_box(x,y,h,&a1);drawbox(&a1);for(;;){turn1[0]=0;turn1[1]=0;turn1[2]=0;key=getch();switch(key){case 77:turn1[0]=1;break;case 75:turn1[0]=-1;break;case 72:turn1[0]=1;break;case 80:turn1[0]=-1;break;case 73:turn1[2]=1;break;case 81:turn1[2]=-1;break;case 32:make_box(x,y,h,&a1);break;case 27:exit();break;default:key=0;break;}if(key!=0)drawbox(&a1);}closegrapg();}运行结果见文件夹:SANWEI3.分析使用矩阵保存图形的坐标位置的方法,二维图形的平移就是一个坐标位置移到另一个坐标位置的重定位过程;对于三维的图形的旋转变换就是图形相应的矩阵进行角度的初等变换,而比例变换即是图形矩阵的相应比例变换。
实验二图像几何变换
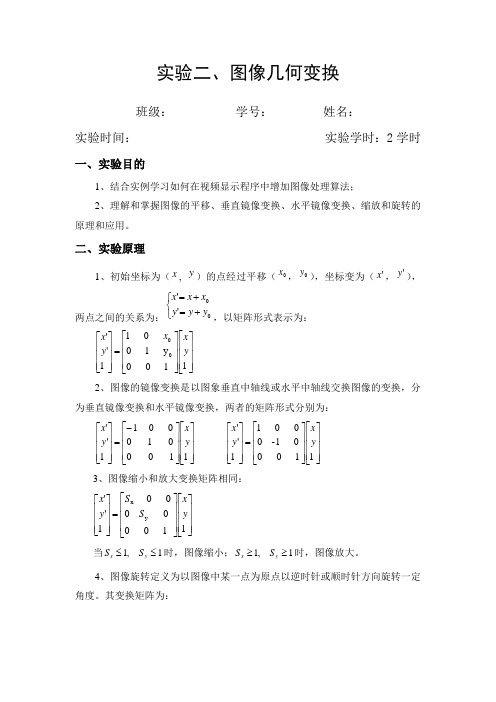
实验二、图像几何变换班级: 学号: 姓名:实验时间: 实验学时:2学时一、实验目的1、结合实例学习如何在视频显示程序中增加图像处理算法;2、理解和掌握图像的平移、垂直镜像变换、水平镜像变换、缩放和旋转的原理和应用。
二、实验原理1、初始坐标为(x , y )的点经过平移(0x ,0y ),坐标变为('x ,'y ),两点之间的关系为:⎩⎨⎧+=+=00''y y y x x x ,以矩阵形式表示为:⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡11 0 0y 1 0 0 11''00y x x y x2、图像的镜像变换是以图象垂直中轴线或水平中轴线交换图像的变换,分为垂直镜像变换和水平镜像变换,两者的矩阵形式分别为: ⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡11 0 00 1 0 0 0 11''y x y x ⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡11 0 00 1- 0 0 0 11''y x y x 3、图像缩小和放大变换矩阵相同:⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡11 0 00 0 0 0 1''y x y x S S y x 当1 ,1≤≤y x S S 时,图像缩小;1 ,1≥≥y x S S 时,图像放大。
4、图像旋转定义为以图像中某一点为原点以逆时针或顺时针方向旋转一定角度。
其变换矩阵为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡11 0 00 cos sin 0 sin cos 1''y x y x θθθθ 该变换矩阵是绕坐标轴原点进行的,如果是绕一个指定点(b a ,)旋转,则现要将坐标系平移到该点,进行旋转,然后再平移回到新的坐标原点。
三、 实验步骤1、启动MATLAB 程序,对图像文件分别进行生成、失真和校正;(参考教材115页,例5.8,例5.9)。
图像的几何变换

3.2 图像的镜像变换
1. 理论基础
图像的镜像变换分为两种:一种是 水平镜像,另一种是垂直镜像。
图像的水平镜像操作是以原图像的 垂直中轴线为中心,将图像分为左右两 部分进行对称变换;
以此类推。在原图基础上,每行隔一个像素取一 点,每割一行进行操作。如下图3-4所示。
●●
●
●●
(a)原图中的某4个像素 素
(b)对应新图的1个像
从上可见图,3-放4 大图像与缩缩小示小意的图原理不同。
2. 理论验证
(a)原图
(b)长宽缩小0.5倍的效果图
(c)长宽各放大2倍的效果图
3.流程设计
(1) 取得原图的数据区指针。 (2) 通 过 对 话 框 获 得 放 大 整 数 比 例 :
1. 理论基础
tx
坐标原点
(x0,y0)
ty
(x1,y1)
图3-1 像素平移示意图
显然(x0,y0)和(x1,y1)的关系如下:
x1=x0+tx y1=y0+ty
2. 理论验证
x
(y
3. 流程设计
(1) 取得原图的数据区指针。 (2) 通过对话框输入偏移量tx,ty。 (3) 开辟一个同样大小的缓冲区。 (4) 对原图依次循环每个像素,每读入一
第3章 图像的几何变换
本章要点:
➢ 图像的平移 ➢ 图像的镜像变换 ➢ 图像的缩放 ➢ 图像的转置 ➢ 图像的旋转
3.1 图像的平移
1. 理论基础
图 像 平 移 ( Translation ) 是 将 图 像中所有的点都按照指定的平移量,进 行水平、垂直移动。
SuperImage影像分析仪快速参考手册

SuperImage 快速参考手册概述欢迎使用SuperImage图象分析软件。
SuperImage显微图象分析系统是一工作在Windows 操作系统下的24位真彩色通用图象检测与分析系统。
SuperImage采用先进的图象分析算法,能对各种显微图象进行处理、分析和检测,是图象检测与分析的有效工具。
一.SuperImage能完成那些工作SuperImage提供的图象处理与分析功能,覆盖图象定量分析的几乎所有应用领域,包括材料、冶金、医药、生物、化工、摩擦学等各种需要利用图象手段进行统计学和形态学自动分析、测定的领域。
凡是与图象形态学有关的各种检测与分析都可以利用SuperImage来完成。
例如组织细胞形态学分析,金属显微组织及晶粒度分析,油料中污染物含量分析,农业种子形态分析,各种微小异行零件几何尺寸测量,化学工业中各种反应物粒子的形态分析等都可以利用SuperImage来完成。
利用SuperImage提供的分析结果,可使企业质量控制更具科学依据,提高企业管理水平和对外形象,是企业从事科技新产品开发,产品质量监控的有效工具。
SuperImage亦可作为理论教学、实验分析和基础科学研究的有效工具。
二.SuperImage的主要特点●符合GB15445,美国ASTM112 及ISO9276标准;●支持TW AIN接口标准扫描仪及数字相机,支持多种图象采集卡;●充分利用WINDOWS系统资源,全面支持WIN95,WIN98操作环境;●最新的程序设计手段,全汉化图文界面,可泊位图形工具条,使用简洁、直观、方便、快捷,只需点击鼠标,便可完成分析;●提供在线中文帮助提示,无需专业培训,便可掌握使用方法;●提供多种功能强大的区域选取工具,可对任意形状的区域进行处理与分析;●可完成包括色度调整,图象变形,数学形态学处理,图象增强,图象匹配,纹理分析,特征识别等一百多种专业图象处理与分析功能;●支持24位真彩色图象采集、支持RGB、CMY、HSV、Lab、YUV等彩色模型的处理与分析;●分析数据的可视化处理使分析结果与图象之间构成直接映射关系,便于观察分析;●先进的颗粒自动识别、粘连颗粒自动切分功能,保证了复杂图象的准确分析;●自动分析处理步骤编辑功能,能够完成全自动分析过程的设置;●悔步、重复功能,使用户能够找到最佳处理路径;●几何参数测量功能,细长体、块状体、颗粒体、线状体等各种特征体的自动定量分析功能,分析参数达一万多项。
如何进行几何校正

如何进行几何校正引言:在现代科技发展的今天,图像处理和计算机视觉已经渗透到我们生活的方方面面。
在图像拍摄和处理过程中,几何校正是一项至关重要的技术。
通过几何校正,我们可以将图像中的畸变纠正,使得图像更加真实和准确。
本文将介绍几何校正的基本概念和主要方法。
一、几何校正的概念几何校正是指对拍摄或采集到的图像进行几何变换,从而修复或消除图像中的畸变。
几何畸变包括平面形变和透视畸变。
平面形变主要表现为图像的拉伸或收缩,而透视畸变则是由于相机和物体之间的角度或距离造成的形变。
二、几何校正的方法1. 标定校正标定校正是几何校正中最常用的方法之一。
通过采集已知的参考物体,在图像中识别出它们的特征点,并与真实世界中的对应点进行匹配,从而获取相机的内外参数。
然后,利用这些参数进行几何变换,对图像进行校正。
2. 基于模型的校正基于模型的校正是一种更加复杂的方法。
它假设图像中的畸变遵循一定的数学模型,通过拟合和调整模型参数,对图像进行几何校正。
常用的模型包括多项式模型和极坐标模型。
这种方法的优势在于可以对不同类型的畸变进行较为精确的建模和校正。
3. 变换校正变换校正是一种基于变换矩阵的几何校正方法。
通过选择合适的变换矩阵,如平移矩阵、旋转矩阵和缩放矩阵,可以对图像进行不同类型的几何变换。
这种方法简单直观,易于实现,适用于简单的畸变校正。
三、几何校正的应用几何校正在计算机视觉和图像处理领域有着广泛的应用。
以下是几个常见的应用场景。
1. 视频监控系统在视频监控系统中,摄像机常常安装在高处或特殊角度,这样会导致拍摄到的图像出现透视畸变。
通过几何校正,可以将图像中的透视畸变纠正,使得监控画面更加真实和清晰。
2. 车载导航车载导航系统通过图像识别来感知道路和交通信号。
然而,由于车载相机的位置和角度可能与真实道路存在一定偏差,导致图像中的道路形状出现畸变。
通过几何校正,可以准确还原图像中的道路形状,提高导航系统的准确性和可靠性。
变换图像的操作方法

变换图像的操作方法变换图像有许多不同的操作方法,可以通过修改图像的几何属性、颜色属性或者根据特定的应用进行变换。
下面将介绍几种常用的图像变换操作方法。
1. 几何变换几何变换是通过对图像的几何属性进行修改,改变图像的位置、形状、大小和方向。
常见的几何变换包括平移、旋转、缩放和剪裁等。
- 平移:平移是将图像沿着水平和垂直方向移动一定的距离。
平移操作可以通过对图像每个像素坐标进行加法运算来实现。
例如,将一个图像向右平移10个像素,就可以将图像的x坐标都加上10。
- 旋转:旋转是将图像围绕一个中心点进行旋转一定的角度。
旋转操作可以通过对图像每个像素坐标进行旋转矩阵运算来实现。
例如,将一个图像顺时针旋转30,就可以将图像的x和y坐标都根据旋转矩阵进行变换。
- 缩放:缩放是改变图像的大小。
缩放操作可以通过对图像的每个像素进行插值运算来实现。
常用的插值方法有最近邻插值、双线性插值和双三次插值等。
- 剪裁:剪裁是将图像从一个大的尺寸截取到一个较小的区域。
剪裁操作可以通过对图像的像素坐标进行判断,只保留指定区域内的像素值。
2. 色彩变换色彩变换是通过修改图像的色彩属性来变换图像。
常见的色彩变换包括调整亮度、对比度、饱和度和色调等。
- 调整亮度:调整图像的亮度可以通过对每个像素的RGB值进行加减操作来实现。
增加亮度时,可以将RGB值都加上一个较大的常数;减小亮度时,可以将RGB值都减去一个较大的常数。
- 调整对比度:调整图像的对比度可以通过拉伸图像的灰度值范围来实现。
可以使用直方图均衡化等方法将图像的灰度值分布拉伸到更广的范围。
- 调整饱和度:调整图像的饱和度可以通过修改图像的色彩空间来实现。
可以将RGB空间转换为HSV空间,然后修改饱和度分量的值,再将HSV空间转换回RGB空间。
- 调整色调:调整图像的色调可以通过修改图像的色相值来实现。
可以将RGB 空间转换为HSV空间,然后修改色调分量的值,再将HSV空间转换回RGB空间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图像几何变换程序*******************实践教学*******************兰州理工大学计算机与通信学院2012年秋季学期图像处理综合训练题目:图像几何变换程序设计专业班级:姓名:学号:指导教师:成绩:目录摘要 0一、前言 (1)二、算法分析与描述 (2)2.1图象平移 (2)2.2图象比例变换 (2)2.3图象水平、垂直翻转 (3)2.4图象旋转 (3)三、详细设计过程 (5)3.1算法分析 (5)3.2设计内容 (6)3.3流程图 (6)四、调试过程中出现的问题及相应解决办法 (8)五、程序运行截图及其说明 (9)六、简单操作手册 (12)设计总结 (16)参考资料 (17)致谢 (18)附录 (19)摘要图形图像处理主要是通过计算机对图像进行处理,从而达到预期的那种效果的技术。
因为处理离不开计算机,所以又称计算机图像处理。
图像几何变换是计算机图像处理中很重要的一部分,主要包括图像的水平、垂直翻转,图像旋转变换,图像比例变换。
在图像处理中,可以通过MATLAB来实现图像的几何变换,此软件的语法结构简单,并且具有极强的数值计算、图形文字处理、数据分析、图形绘制及图像处理等功能。
关键字:图像的几何变换;MATLAB;图像的旋转;垂直、水平翻转;比例变换一、前言MATLAB是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分。
MATLAB是一种既可交互使用又能解释执行的计算机编程语言。
所谓交互使用,是指用户输入一条语句后立即就能得到该语句的计算结果,而无需像C语言那样首先编写源程序,然后对之进行编译,连接,才能最终形成可执行文件。
MATLAB语言可以用直观的数学表达式来描述问题,从而避开繁琐的底层编程,因此可大大提高工作效率。
图像用数字任意描述像素点、强度和颜色。
描述信息文件存储量较大,所描述对象在缩放过程中会损失细节或产生锯齿。
在显示方面它是将对象以一定的分辨率分辨以后将每个点的色彩信息以数字化方式呈现,可直接快速在屏幕上显示。
分辨率和灰度是影响显示的主要参数。
图像适用于表现含有大量细节(如明暗变化、场景复杂、轮廓色彩丰富)的对象,如:照片、绘图等,通过图像软件可进行复杂图像的处理以得到更清晰的图像或产生特殊效果。
图像几何变换主要是指数字图像的几何变换(或称为空间变换),即图像中点与点之间的空间映射关系。
是通过数学建模实现对数字图象进行几何变换的处理。
可以让我们从不同角度去观察或欣赏图片,增加对个方位图像的理解。
二、算法分析与描述2.1图象平移图像平移是将一幅图像中所有的点都按照指定的平移量在水平、垂直方向移动,平移后的图像与原图像相同。
平移后的图像上的每一点都可以在原图像中找到利用齐次坐标,变换前后图像上的点P0(x0, y0)和P(x, y)之间的关系可以用如下的矩阵变换表示为:2.2图象比例变换图象比例变换是指图象缩小。
图象缩小是通过减少像素个数来实现的,根据所期望缩小的尺寸数据,从原图象中选择合适的像素点,使图象缩小之后可以尽量保持原有图像的概貌特征不丢失。
以图象缩小为例设原图像大小为M*N ,缩小为k1M*k2N ,(k1<1,k2<1)。
算法步骤如下:(1)设原图为F(i,j),i=1,2,…,M ;j=1,2,…,N.压缩后图像是G(x,y), x=1,2,…,k1M, y=1,2,…,k2N.其中,c1=1/k1 c2=1/k2 为采样间隔(2)G(x,y)=F(c1*x,c2*y)2.3图象水平、垂直翻转图像的水平翻转操作是以原图像的垂直中轴线为中心,将图像分为左右两部分对称变换;图像的垂直镜像操作是以原图的水平中轴线为中心,将图像分为上限两部分对称变换。
翻转后的高和宽都不变。
设图像高度为Height ,宽度为Width ,原图中的(0x ,0y )经过水平翻转后坐标将变为(Width-0x ,0y )即1010Width-x x y y =⎧⎨=⎩ 同样,(0x ,0y )经过垂直翻转后坐标将变成为(0x ,Width-0y ),即1010Height-x x y y =⎧⎨=⎩ 2.4图象旋转图像的旋转是指以图像中的某一点为原点以逆时针或顺时针方向旋转一定的角度。
通常是围绕图像的起始点以逆时针旋转。
这样,就可以利用解析几何的方法来实现图像的旋转。
(0x ,0y )直角坐标系中的图像旋转 (1x ,1y )图像旋转计算公式如下:1010Width-x x y y =⎧⎨=⎩ 其中,(,)i j 是原图像(,)f i j 中的像素的坐标;''(,)i j 是对应像素点(,)i j 经过旋转变换后图像''(,)G i j 的像素的像素点坐标。
图像旋转以后会出现空穴的现象,可以用插值法来解决。
所谓插值法就是在判断为空穴的位置上填充一个估计的值。
因为估计值的选择不同,得到的方法的复杂度和效果也不同,在这里用的是均值插值法。
均值插值法是将空穴像素周围像素的均值作为填充值填在该空穴点中,如:131112232122333132 0 0 0 0 G 0 0 0f f f f f f f f f ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦其空穴像素点为(2,3)的周围(上、下、左、右)的像素值为13221223,,,f f f f ,则该点的像素值2313221223()/4g f f f f =+++,即13111223232122333132 0 0 0 G 0 0 0f f f g f f f f f f ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦。
图2.1图像旋转示意三、详细设计过程3.1算法分析本课程设计通过菜单和按钮的方式来对图片进行各种几何变换,操作简单,处理结果一目了然。
系统具备良好的图形用户界面,通过按钮或菜单进行操作控制,能让用户方便地选择不同的图像文件进行处理,并显示图像处理的结果。
利用菜单按钮及简介的版块设计实现各功能的处理结果与操作方式。
介绍图片处理按钮菜单的功能。
主界面设计如下:图(1)主界面3.2设计内容图像的几何变换:平移,缩放,翻转,旋转。
1平移:平移是日常生活中最普遍的运动方式,而图像的平移是几何变换这中最简单的变换之一。
菜单中使用 translate函数和movesult对图像进行平移,通过改变程序中的参数可以控制平移的方式,视需求而定。
2翻转:实现水平,垂直,翻转处理,双精度取点后调用函数实现。
3缩放与旋转变换:利用'nearest' 'bilinear' 'bicubic'三个函数实现图片的三种缩放与旋转处理。
利用imresize和imrotate两个函数实现缩放及旋转功能。
3.3流程图(1)翻转图(2)翻转流程图(2)缩放与旋转图(3)缩放与旋转四、调试过程中出现的问题及相应解决办法对matlab函数调用不够熟悉,导致在设计的时候陷入很多误区。
比如,平移变换的方法二总是指示错误,后来几经调试,才排除错误,得到正确的结果。
还有提高部分的努力也是一样。
本次课程设计主要是运用了上课所学的知识与Matlab的强大函数调用功能,不足之处甚多,但是本次的设计中我们也有少许的创新之处,比如,Matlab参数录入子程序就是小组自己编写的,花了很多功夫收集资料以及改进。
五、程序运行截图及其说明(1)未经处理的原图图(4)原图(2)图像进行平移变换:图(5)平移后的结果(3)水平翻转:图(6)水平翻转(4)垂直翻转:图(7)垂直翻转(5)旋转图(8)旋转45度六、简单操作手册在matlab中打开kk.fig并运行,在打开的图形界面中单击:文件--->打开,选中所要处理的图片,打开。
选择所要进行的变换方式,进行变换,打开图片界面图(9)操作界面平移效果:图(10)图(11)放大、缩小:图(12)图(13)双线性内插法放大2倍水平翻转:图(14)水平翻转垂直翻转:图(15)垂直翻转旋转:图(16)图(17)图像旋转100度(截取部分)撤销、退出:“撤销”可以实现图像的还原,“退出”可以退出编辑图(18)设计总结通过这次“基于matlab的数字图像处理”的课程设计,学到了很多很多,最基本的就是重新熟悉了matlab语言,不仅仅只是在matlab编程上面有所提高和对界面设计熟悉,对数字图像处理也有了更深刻的认识。
首先,明白了图像对于matlab而言就是矩阵,灰度图像和彩色图像对应于不同维数的矩阵,分别为二维和三维,其中三维矩阵每一位代表一种颜色。
矩阵可以使实数,也可以使复数,不同的图像矩阵的元素对应于不同的类型,有double,uint8等类型。
由于几乎所有的matlab函数及其工具箱函数都可以使用double作为参数类型,不过由于64bit来表示图像数据存储量特别巨大,所以matlab还支持图像数据的无符号整型存储,所以使用时还要注意输出数据类型的转换。
最后,我们必须要明白理论指导实践,要想实现预期的效果,必须明白它实现的机制和相应的算法,只有通过相应的理论来指导,我们才能有所创新,才能有所突破,而不只是单纯的引用相应的处理函数。
例如对于截图函数,它只能是截取坐标轴内的图像,对坐标轴意外的图像却不能处理,而且对于同时显示在坐标轴上的几张图像,它只能处理最后显示的那张,如果我们通过对它改进,能实现像qq截图那样的功能就很强大了。
不过通过这次的实现,我对图像的模式,几何变换的原理,图像的平移,水平、垂直翻转,缩放以及旋转等原理都有了更清楚的认识,也明白了它们的实现机制。
matlab还有很多很多新功能等待我们去探索。
通过这次的课程设计,我们受益匪浅。
参考资料[1]郑阿奇,曹戈,赵阳.MATLAB实用教程[M].北京:电子工业出版社2002年版[2]张弘.数字图像处理与分析[M].北京:机械工业出版社 2005年版[3]孙兆林.MATLAB 6.X图像处理[M].北京:清华大学出版社 2010年版致谢通过此次课程设计,在一定程度上提高了我的实际动手能力,同时也培养了我思考问题、解决问题的能力。
对于matlab软件的应用能力也得到了很大的提高,了解到了很多自己有所不足的地方。
虽然只有短短的两周时间,但是这使我认识到了做设计的乐趣,也明白了课程设计对于知识的吸收和要点的理解是非常重要,在两周的时间里,遇到了很多问题,周围同学和老师的帮助起了很大的作用,非常感谢他们,充分体会到了团队合作的重要性。
附录Matlab程序实现代码(1)图片的平移平移axes(handles.axes2); %定义图像显示位置I=handles.img;%选定操作图T=getimage;%获取图像信息prompt={'输入参数:'};defans={'2'};p=inputdlg(prompt,'input',1,defans); %创建数据输入窗口 p1=str2num(p{1});J = double(I);%定义为双精度型H = size(I);%定义尺寸I_moveresult = zeros(H);%平移后背景变成了黑色的x_move =p1; y_move =p1;I_moveresult(x_move+1:H(1),y_move+1:H(2),1:H(3))= J(1:H(1)-x_move,1:H(2)-y_move,1:H(3));imshow(mat2gray(I_moveresult));(2)图片的放大、缩小缩放axes(handles.axes2); %定义图像显示位置;I=handles.img; %选定操作图T=getimage; %获取图像信息prompt={'输入参数:'};defans={'2'};%定义数据,放大缩小p=inputdlg(prompt,'input',1,defans);%创建数据输入窗口p1=str2num(p{1});f=imresize(I,p1,'nearest'); %选用插值方法最近邻法figure,%新建窗口imshow(f);%显示结果(3)图片翻转水平翻转axes(handles.axes2); %定义图像显示位置;A1=handles.img; %选定操作图A1=double(A1);%定义为双精度型H=size(A1);%定义尺寸A3(1:H(1),1:H(2),1:H(3))=A1(1:H(1),H(2):-1:1,1:H(3));%水平翻转imshow(uint8(A3));%显示结果垂直翻转axes(handles.axes2); %定义图像显示位置;A1=handles.img; %选定操作图A1=double(A1); %定义为双精度型H=size(A1); %定义尺寸A2(1:H(1),1:H(2),1:H(3))=A1(H(1):-1:1,1:H(2),1:H(3));%垂直翻转imshow(uint8(A2)); %显示结果(4)图片的旋转旋转axes(handles.axes2); %定义图像显示位置;T=getimage; %获取图像信息prompt={'旋转角度:'};defans={'0'};p=inputdlg(prompt,'input',1,defans); %创建数据输入窗口p1=str2num(p{1});%把字符串转换为数值f=imrotate(handles.img,p1,'nearest');%旋转并定义插值方法imshow(f); %显示结果(5)撤销(还原)axes(handles.axes2);%还原y=imread(S);f=imshow(y);handles.img=y;guidata(hObject,handles);。