机器人写字技术及其运动参数X
写字机器人书写笔迹特征研究
写字机器人书写笔迹特征研究摘要:写字机器人以“编写”的形式复制母版字库内容,与传统笔迹相比,写字机器人笔迹的形成机理和书写条件发生了很大变化,从而导致笔迹特性发生了明显变化。
本文从写字机器人的结构和工作原理入手,结合书写工具的特点,分析、研究、总结书写机器人笔迹文字的特征和一般规律,并探索和总结笔迹的检验鉴定方法,旨在为类似机器人笔迹的识别提供理论参考和实践参考。
关键词:写字机器人; 笔迹特征; 书写1 前言随着科技的发展与进步,自动化和人工智能的水平不断提高。
其中,机器人的应用领域也在不断扩展,呈现出高精度、智能化的特点,可替代人工完成很多工作。
但同时,也会给一些行业带来困扰和挑战,例如在司法鉴定领域,不法分子利用写字机器人来模仿他人的笔迹,进行伪造合同等违法犯罪行为。
该如何鉴别写字机器人书写笔迹和人类书写笔迹就是一个急需研究和解决的问题。
本文从写字机器人的结构和工作原理入手,结合书写工具的特点,系统分析书写机器人的笔迹特征,力求为写字机器人书写笔迹检验鉴定工作提供有价值的参考。
其研究具有前沿性和预防性,可以有效地预防和打击此类违法犯罪行为,提高社会治安管控水平,提高侦查效率和打击犯罪的能力,具有较强的社会效益。
2 写字机器人的结构与原理通常,写字机器人主要由横向和纵向两组垂直的杆状电子金属套件和书写臂组成,形成X 轴、Y 轴和Z 轴,进行二维矢量输出。
X 轴的运动主要是通过控制底盘上的四个直流电机来实现,主要来完成横笔画的书写。
Y 轴的运动采用抽屉的滑轨配合齿轮齿条传动机构来实现的,主要用来完成竖画的书写。
Z 轴的书写方式与Y 轴相似,主要实现起笔与收笔。
结合控制板、步进电机、抬笔舵机等硬件控制,带动书写臂上的书写工具运动,在平面上绘出程序控制的线条,即形成所谓的字迹。
根据程序设置,可以书写字库中的字体,也可以使用专门软件制作字体的轨迹,将其录入机器人的控制系统,复写出特定人的笔迹。
3 写字机器人笔迹特征分析写字机器人书写笔迹与字库文字具有高度相似性。
智能写字机器人的说明书

智能写字机器人的说明书欢迎使用智能写字机器人!本说明书将详细介绍机器人的功能、操作方法以及注意事项。
请仔细阅读并按照说明进行操作。
一、产品概述智能写字机器人是一款拥有自动书写和手写识别功能的现代化产品。
它集合了先进的人工智能技术和精准的机械结构设计,可实现各种书写需求。
二、产品特点1. 自动书写功能智能写字机器人能够以高精度、高速度完成书写任务,能模拟人类自然的书写姿势和笔画。
用户只需输入文字内容并设置相关参数,机器人即可自动书写出清晰可辨的手写字体。
2. 手写识别功能该机器人还具备强大的手写识别能力,能够将手写字迹自动转换为电子文档。
用户可以将纸质文档放置在机器人书写区域,机器人将自动读取并保存为电子文件,方便后续编辑和存档。
3. 多功能操作智能写字机器人支持多种书写方式,包括横线、竖线、曲线等不同形态的笔画。
同时,用户还可以调整字体风格、字号、字距等参数,以满足个性化的需求。
4. 操作简便机器人操作界面简洁直观,配备了大屏幕触控显示器,用户可以通过手势或触摸按钮完成各项操作。
同时,机器人还可以通过语音指令来执行书写任务,方便了需要同时进行其他操作的用户。
三、使用方法1. 连接电源将智能写字机器人插入电源插座,并确保电源供应正常,待机器人启动界面显示后,即可进入下一步操作。
2. 设置参数在机器人操作界面上选择相关书写参数,如字体、字号、字距等。
用户也可以预先设置字体样式,以便在之后的书写任务中快速选择。
3. 输入书写内容通过触控显示器或语音指令输入需要书写的文字内容。
在输入时,请确保手写字迹清晰可读或语音指令准确无误。
4. 开始书写确认书写参数和内容无误后,点击开始书写按钮或通过语音指令启动机器人进行书写。
在书写过程中,请勿干扰机器人操作,以免影响书写效果。
5. 保存和编辑书写完成后,机器人会提示保存书写内容。
用户可选择将内容保存为纸质文档或电子文件,并在需要时进行二次编辑和调整。
四、注意事项1. 请将机器放置在平稳的桌面或底座上,并确保书写区域整洁干净,避免杂物干扰机器人正常操作。
写字机器人

写字机器人机器人制作与创新创新一机器人写字机器人在我们的生活中应用越来越广泛,例如家务机器人、表演机器人、消防机器人、医疗机器人等。
在写字机器人的制作与创新过程中涉及到了单片机、电子技术、传感器、自动控制、电机技术、机械传动机构等相关知识。
利用单片机的可编程性、易控制、搭接电路简单、工作稳定、性能优越、价格低廉等特点,结合检测传感技术,综合应用到控制系统中,使写字机器人实现智能化。
该写字机器人可用作教师的辅助教学设备和机器人的实践设备等。
一、写字机器人的硬件设计写字机器人的整体结构如图1 所示图1 写字机器人的整体结构1(写字机器人的X轴运动写字机器人X轴的运动主要是通过控制底盘上的四个直流电机来实现,对单片机进行编程实现对机器人X轴的运动控制,写字机器人X轴如图2所示:图2 写字机器人X轴运动1机器人制作与创新2(写字机器人Y轴的运动写字机器人Y轴的运动采用的抽屉的滑轨配合齿轮齿条传动机构来实现的,具体的硬件的搭接方法如图3所示:图3 Y轴的运动单片机通过控制电机转动带动齿轮和齿条的运动来实现Y轴的上升和下降,从而实现“竖”笔画的书写3(写字机器人Z轴的运动写字机器人Z轴的运动采用的方法同Y轴的方法是一样的,Z轴的运动主要实现笔的进笔和出笔。
具体的硬件搭接方法如图4所示:图4 Z轴的运动二、程序设计1(写字机器人编程语言的选择机器人软件开发平台可以使用LOGO语言、QBASIC语言、汇编语言、C语言四种编程语言,而LOGO语言、QBASIC语言和C语言这三种语言的编程相对比较简单,但是占用程序存储空间比较大,而要在黑板上写出“北京仪表学校”六个字需要的程序存储空间比较大,而单片机只有4K的程序存储空间,所以这三种语言是不能选择的。
最终写字机器人采用的是汇编语言,虽然汇编语言的编程相2机器人制作与创新对来讲比较复杂,但是它属于底层语言(机器语言),占用空间比较小。
2(单片机存储器跨页的问题的解决机器人软件开发平台如果采用QABSIC语言进行编程,如果程序超过存储器容量的40,后,程序就不会按照编写的程序来执行,程序将出现跑飞,其主要原因是PIC单片机的程序存储器是分页进行存储的,采用QBASIC语言进行编程无法解决分页的问题,所以只能写在第0页上,无法写到后续的存储页上,这样写的程序的容量就受到了限制,这也是为什么采用汇编语言的第二个原因。
工业机器人技术基础 工业机器人技术参数

O B
h
B
h
(b)
(b )良好定位(精c) 度,很差重复定位精度
(d)
(a)合理定位精度,良好重复定位精度
(c)很差定位精度,良好重复定位精度
工业机器人工作空间
• 定义
工作空间是指机器人手臂末端或手腕中心所能到达的所有点的集合
• 参考点
手部中心、手腕中心或手指指尖 参考点不同,工作空间的大小、形状也不同
U-3
L-2
R-4 B-5 T-6
S-1
工业机器人自由度
• 工业机器人是典型机构,我们可以直接数出它的自由度。 • 组成机器人的旋转关节或移动关节,每个关节具有一个自由度! • 通常情况下,每个轴可以增加一个自由度。 • 常见的工业机器人有:4轴,6轴,7轴
工业机器人自由度
• 4自由度—SCARA机器人
• 3个旋转关节+1个移动关节 • 结构轻便、响应快 • 适用于平面定位,垂直方向进行装配的作业
工业机器人自由度
• 6自由度
• 第一个关节能在水平面自由旋转 • 二、三两个关节能在垂直平面移动; • “手臂”(四关节)+两个“手腕” (五六关节)可
以拿起水平面上任意朝向的部件,以特殊的角度放入 包装产品里。还可以执行许多由熟练工人才能完成的 操作。
工业机器人工作空间
• 决定因素
行程、尺寸、角度
• 意义
工作范围的形状和大小十分重要,机器人在执 行某作业时可能会因为存在手部不能到达的作业死 区而不能完成任务。
工业机器人最大速度
• 定义
• 设计角度:工业机器人主要自由度上的最大稳定角速度,单位:rad/s或°/s • 功能角度:在各轴联动的情况下,机器人手腕中心所能达到的最大线速度,单位:
机器人的主要技术参数
机器人的主要技术参数一、引言机器人是一种具有自主行动能力的智能装置,广泛应用于工业生产、家庭服务、医疗卫生、农业等各个领域。
机器人的主要技术参数是衡量其性能和能力的关键指标,包括智能感知、运动控制、人机交互等方面。
本文将深入探讨机器人的主要技术参数并分析其应用场景和发展趋势。
二、智能感知技术参数智能感知是指机器人通过传感器获取周围环境信息并进行解析处理的能力。
智能感知技术参数主要包括以下几个方面:1. 传感器类型•视觉传感器:包括摄像头、深度相机等,用于获取图像信息。
•触觉传感器:包括力传感器、力触须等,用于感知物体的力学性质。
•声音传感器:用于获取声音信息。
•化学传感器:包括气体传感器、温度传感器等,用于检测周围环境的化学特性。
2. 传感器分辨率传感器分辨率是指传感器对环境信息获取的精度和准确度。
越高的分辨率意味着机器人能够更准确地感知和理解环境信息。
3. 传感器响应速度传感器响应速度是指传感器对环境信息变化的反应速度。
较高的响应速度能够提高机器人的实时感知和决策能力。
三、运动控制技术参数运动控制是指机器人通过执行器控制身体的运动和姿态的能力。
运动控制技术参数主要包括以下几个方面:1. 关节自由度关节自由度是指机器人身体各个关节能够运动的自由度数量。
较多的自由度能够使机器人拥有更灵活多样的运动能力。
2. 运动速度运动速度是指机器人在执行任务时的速度。
较高的运动速度能够提高机器人的工作效率。
3. 精度精度是指机器人在执行任务时的定位准确度。
较高的精度能够保证机器人在执行精细操作或高精度测量时的准确性。
4. 碰撞检测和避障能力碰撞检测和避障能力是指机器人在运动过程中能够检测到障碍物并避免碰撞的能力。
这对于机器人在复杂环境中安全运行至关重要。
四、人机交互技术参数人机交互是指机器人与人类用户之间的互动和沟通方式。
人机交互技术参数主要包括以下几个方面:1. 语音识别准确度语音识别准确度是指机器人能够准确识别人类语音指令的能力。
机器人写字方案

机器人写字方案日期:第一部分背景介绍 (3)第二部分方案说明 (4)第三部分握笔装置的设计 (7)第一部分背景介绍1. 工业机器人的特点工业机器人最显著的特点有以下几个:(1) 可编程。
生产自动化的进一步发展是柔性启动化。
工业机器人可随其工作环境变化的需要而再编程,因此它在小批量多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统中的一个重要组成部分。
(2) 拟人化。
工业机器人在机械结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有电脑。
此外,智能化工业机器人还有许多类似人类的“生物传感器”,如皮肤型接触传感器、力传感器、负载传感器、视觉传感器、声觉传感器、语言功能等。
传感器提高了工业机器人对周围环境的自适应能力。
(3) 通用性。
除了专门设计的专用的工业机器人外,一般工业机器人在执行不同的作业任务时具有较好的通用性。
比如,更换工业机器人手部末端操作器(手爪、工具等)便可执行不同的作业任务。
(4) 工业机器技术涉及的学科相当广泛,归纳起来是机械学和微电子学的结合-机电一体化技术。
第三代智能机器人不仅具有获取外部环境信息的各种传感器,而且还具有记忆能力、语言理解能力、图像识别能力、推理判断能力等人工智能,这些都是微电子技术的应用,特别是计算机技术的应用密切相关。
因此,机器人技术的发展必将带动其他技术的发展,机器人技术的发展和应用水平也可以验证一个国家科学技术和工业技术的发展水平。
2. 工业机器人的结构工业机器人由主体、驱动系统和控制系统三个基本部分组成。
主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。
大多数工业机器人有3〜6个运动自由度,其中腕部通常有1〜3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
工业机器人按臂部的运动形式分为四种。
直角坐标型的臂部可沿二个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。
机器人写字技术及其运动参数X
n x ox ax px
04 T
=
0 G
T4G
T
=
ny nz
oy oz
ay az
py pz
(7)
0 0 01
θ1
= tg- 1
py px
θ2 = cos- 1
d1 - a4
p
2 x
+
p
2 y
R=
( d1 -
a4) 2
+
p
2 x
+
p
2 y
θ4 = 90°- θ2
(11)
(12)
(13) (14)
3 数控系统[4 ]
人的运动方程 ,能够进行机器人的轨迹规划 、控制等 。
关键词 :写字机器人 ;机器人运动学 ;文字矢量化
中图分类号 : TH112
文献标识码 :A
机器人是具有广泛市场前景的产品 ,已开始在工 业 、军事 、医药 、家庭等领域应用 ,机器人本身是集计算 机 、电子 、机械 、人工智能的高新技术产品 ,是国家科技 部 863 的主题项目 。当人们由计算机键盘输入写字指 令后 ,写字机器人可以写出中文 、英文以及键盘上所有 的文字和符号 ,如果开发相应的软件 ,它还可以绘图 。
R
-1
0
0
0° - a4 θ4
0
0
相邻两连杆坐标系间的变换矩阵 (坐标系{ i} 相
对于坐标系{ i - 1} 的变换矩阵) 为 :
cosθi - cosαi sinθi sinαi sinθi aicosθi
ii - 1A = 0
sinαi
co sαi
di
0
0
0
1
智能自动绘图写字机器人
智能自动绘图写字机器人智能自动绘图写字机器人是目前人工智能技术的一种应用,它能够通过预先设定的程序,以一种智能化的方式来进行绘图和写字操作。
这种机器人不仅可以帮助人们提高绘图和书写的效率,还可以在一定程度上实现艺术创作的自动化,因此在教育、娱乐和工业生产等各个领域有着广阔的应用前景。
智能自动绘图写字机器人的工作原理是通过先进的视觉识别和控制技术,结合机械臂的运动能力,实现绘图和书写的自动化。
在传统的绘图和书写过程中,需要人工进行大量的劳动,而且容易受到人的个人技能和状态的影响,导致作品的质量参差不齐。
而智能自动绘图写字机器人则可以完全摆脱这些限制,通过预先设计好的程序,可以精准地跟随指令,实现高质量和高效率的绘图和书写操作。
智能自动绘图写字机器人的应用范围非常广泛。
在教育领域,它可以帮助学生们在绘图和写字方面提高技能,而且可以通过不断地反馈和调整程序来适应每个学生的水平,从而更好地促进学习效果。
在艺术创作领域,智能自动绘图写字机器人可以被用来实现一些非常复杂和细致的绘画作品,为艺术家们提供更多的创作可能。
在工业生产领域,智能自动绘图写字机器人可以取代人工进行一些简单的绘图和书写操作,从而提高生产效率和质量。
智能自动绘图写字机器人的发展史可以追溯到20世纪70年代。
当时,科学家们开始尝试用计算机技术来实现自动绘图和书写,但由于硬件水平和算法的限制,当时的机器人只能实现非常简单的绘图和书写操作。
随着计算机技术和机械臂技术的不断发展,智能自动绘图写字机器人的性能也得到了大幅提升。
现在,智能自动绘图写字机器人已经可以实现非常复杂和精细的绘图和书写操作,而且动作速度也得到了明显的提高。
虽然智能自动绘图写字机器人的性能得到了大幅提升,但是在一些复杂的绘图和书写任务上仍然存在一些挑战。
在书写方面,机器人需要能够识别和模仿不同的字体和笔迹,而且要能够适应不同纸张和书写材料的表面特性。
在绘图方面,机器人需要能够模拟人的手部动作,实现精细的线条和色彩的表达,这需要对机械臂和控制系统的精益求精。
会写字的机器人的设计

会写字的机器人的设计摘要:21世纪,数控技术已成为机械制造业的重要组成部分,是一个国家装备自动化的重要指标。
会写字的机器人是基于数控技术的一个典型的机电一体化设备。
该机器人主要包括一个二维的运动平台及一个运动控制系统。
本机器人系统融合机械设计和软件开发于一身,相对于大型的数控机床,该装置直观简洁。
对于数控技术的学习开发具有重要的意义。
关键词:会写字,机器人,设计,硬件,软件本论文取材于校第十期SRTP—会写字的机器人。
数控技术是机械、电子、控制等多学科多领域结合的产物。
到了二十一世纪,数控技术已经成为机械制造业的重要组成部分,是一个国家装备自动化的重要指标,也是衡量一个国家综合国力和工业现代化水平的重要标志。
本项目所研制的会写字的机器人正是基于数控技术的一个典型的机电一体化的设备。
当前数控教学大多只是进行原理性的介绍,学生对数控技术缺乏感性的认识及动手能力的培养。
使用生产型的数控机床培训费用过于昂贵,存在着安全方面的问题和隐患,也不利于学生对数控原理的了解。
因而我们决定制作一个会写字的机器人,通过该机器人,学生不但可以了解机电一体化设备的结构、组成、传动原理,还能够了解掌握数控软件的开发和应用,在直观上对数控装置形成印象,利于今后进一步学习研究数控装备。
该机器人主要包括一个二维的运动平台及一个运动控制系统。
二维平台采用步进电机+滚珠丝杠实现传动。
运动控制系统采用嵌入式ARM芯片开发,而人机交互使用PC实现。
机械设计部分设计出了二维运动平台及各个方向的传动机构,主轴机构等。
软件部分分析了数控机器人写字的原理,先把文字转化成位图,再提取位图的边界信息和内部信息,生成加工程序的G代码,最后得到设计简单,方便易用的操作界面。
本机器人系统融合机械设计和软件开发于一身,相对于大型的数控机床,该装置直观简洁。
通过该装置的学习,不但可以大幅度提高数控教学的效果,还能够很好的培养学生的动手及设计能力,提高学生对机械数字化装备的兴趣,使学生能更容易地掌握到数控技术的核心知识。
书法机器人技术原理
书法机器人技术原理Calligraphy is a traditional art form in China, characterized by the elegant and expressive strokes of Chinese characters. For centuries, calligraphy has been cherished as a high form of art and the embodiment of Chinese culture. However, the intricate techniques and skills required for calligraphy have limited its accessibility to a wider audience. In response to this challenge, researchers and engineers have been developing calligraphy robots that aim to replicate the artistry and precision of human calligraphers. These robots are equipped with advanced technology that allows them to mimic the delicate movements of a calligraphy brush and produce stunning works of art.书法是中国的传统艺术形式,以其优雅和富有表现力的汉字书法笔触而闻名。
数百年来,书法一直被珍视为一种高级艺术形式,是中国文化的体现。
然而,书法所需的复杂技术和技能限制了更广泛受众的接触。
为了解决这一挑战,研究人员和工程师一直在开发书法机器人,旨在复制人类书法家的艺术和精确度。
四自由度写字机器人的基础研究
重庆大学硕士学位论文
中文摘要
摘
要
机器人技术是当今高技术研究的一个重要方向,普遍受到各国政府的关注。 随着机器人应用在广度和深度上的发展,迫切需要解决其产业化前期的基础技术 研究。本文在学习研究了现有机器人技术基础上,以我们设计的四自由度写字机 器人为例,针对工业机器人的运动控制系统关键技术,如运动学方程的正解、运 动学方程的逆解、工作空间分析、运动轨迹规划,作了较深入的分析和研究。本 文的研究内容包括以下六章: 1. 介绍机器人运动学分析、工作空间分析和轨迹规划的现状和发展趋势,提 出了本文的研究内容。 2. 本文总结分析了现有机器人关节的传动机构,对我们提出的新型关节,从 结构合理性和零件工艺性上进行了改进,讨论了特殊零件的加工工艺,并用其中 的两种关节组成了一台四自由度的垂直多关节型写字机器人。 3. 在机器人学的理论基础上,建立了机器人模型的 D-H 坐标系,并对相邻 坐标系间的变换矩阵作了改进,使 D-H 方法更具有通用性。根据变换方程推导出 一组简单实用的方程来实现运动学方程的正解,运动学逆解较为复杂,因为它实 质上是解一个非线性方程的问题,目前尚没有通用的解法,本文采用代数法来求 解运动学方程的逆解, 并在数学软件 matlab 里编程验证了改进后的 D-H 方法的正 确性。 4. 机器人工作空间是从几何方面讨论机器人的工作性能,工作空间的大小、 奇异位形和灵活性分别反映了机器人位姿输出空间运动学性能的不同侧面。本文 借助图解法作出了实际工作空间的轴截面,提出一种以旋转变换理论和极值理论 为基础的新方法求解定方向空间,即机器人灵活性分析,并分析了各连杆长度对 它们的影响。 5. 机器人轨迹规划在机器人的控制中具有重要的地位。 本论文根据机器人轨 迹规划的要求和约束,在笛卡尔空间用误差极限法求解中间点,用运动学逆解将 这些中间点映射到关节空间,在关节空间用多项式插值,求取控制点,这种规划 方法综合了笛卡尔空间轨迹规划和关节空间轨迹规划的优点,满足实时性和精确 性的要求。 6. 总结了本文取得的主要研究成果。 关键词:关节,运动学,工作空间,轨迹规划
写字机器人的运行原理
写字机器人的运行原理
写字机器人的运行原理基本分为以下几个步骤:
1. 语音识别:写字机器人首先通过语音识别技术将人的语音转化为文本。
这一步骤通常包括语音信号的预处理、特征提取和模型训练等操作。
2. 自然语言处理:得到文本后,写字机器人利用自然语言处理技术对文本进行分词、词性标注、语法分析等处理,以便进一步理解人的意图和需求。
3. 语义理解:在理解文本的基础上,写字机器人需要对人的问题或指令进行语义理解,即将其转化为机器可以处理的形式。
这一步骤通常涉及到对文本进行语义角色标注、命名实体识别、意图分类等技术。
4. 写字生成:在语义理解的基础上,写字机器人会根据人的需求和意图生成相应的文字内容。
这一步骤通常包括从预定的语料库中获取相关信息、利用机器学习方法生成文字等过程。
5. 文字合成:生成文字后,写字机器人会对结果进行合成和调优,使之更符合人类的语言习惯和风格。
这一步骤可以通过一系列的文本处理、修正和优化技术来完成。
6. 文字输出:最后,写字机器人将生成的文字以人类可读的形式输出,可以通
过屏幕展示、语音输出或打印等方式呈现给用户。
总体来说,写字机器人的运行原理是通过语音识别、自然语言处理、语义理解、写字生成和文字合成等技术模块的协同工作,实现将人的语音转化为机器可以理解和处理的文本,并生成相应的文字输出。
机器人的技术参数
机器人的技术参数机器人是一种自动化装置,通常由机械、电子、计算机控制系统等部件组成。
它们可以执行各种任务,从工业生产到个人服务,从简单重复的任务到复杂的操作和决策,具有显著的灵活性和适应性。
下面是机器人的常见技术参数:1. 动力系统:机器人通常由电动机驱动,可以是直流电机、步进电机或伺服电机。
动力系统的性能直接影响机器人的运动速度和精度。
2. 关节数和自由度:机器人的关节是指连接不同构件的旋转或移动机构。
机器人的关节数量决定了其自由度的数量,自由度的增加可以增强机器人的灵活性和工作范围。
3. 工作空间:机器人可以在特定的空间内进行运动和操作,称为工作空间。
工作空间的大小和形状取决于机器人的结构和关节数量,通常以立方体或球形区域来描述。
4. 负载能力:机器人可以携带和操作的最大负载称为负载能力,通常以重量来表示。
负载能力是机器人设计的重要参数,决定了其应用范围和可靠性。
5. 精度和重复性:机器人的精度是指其执行任务时的准确性和稳定性。
重复性是指机器人在重复执行相同任务时的一致性。
精度和重复性的提高可以通过更先进的传感器和控制系统来实现。
6. 传感器系统:机器人通常配备各种传感器,如视觉传感器、力传感器、接触传感器等,以感知周围环境和与之交互。
传感器的种类和性能直接影响机器人的感知和决策能力。
7. 控制系统:机器人的控制系统包括硬件和软件两部分。
硬件通常包括控制器、传感器接口和执行器驱动等。
软件则包括机器人的操作系统、路径规划和动作控制算法等。
优秀的控制系统可以提高机器人的运动性能和智能化水平。
8. 操作界面:为了方便人类和机器人的交互,机器人通常配备图形用户界面(GUI)或其他操作界面。
这些界面可以是触摸屏、按钮、手柄等形式,用于设定任务、监控状态和进行操作。
除了以上常见的技术参数,机器人的设计和性能还受到其他因素的制约,如成本、安全性、可靠性等。
随着技术的不断进步,机器人愈发智能化和多功能化,能够适应更复杂和多样化的任务。
写字机控制算法
写字机控制算法
写字机的控制算法通常可以分为以下几种:
坐标计算控制方法:这种方法是按照预先设定的轨迹、行为、顺序和速度进行重复动作,完成书写。
具体来说,研究者会对汉字的结构进行分析分类,构建出若干子程序,然后针对某一汉字调用函数并进行参数调整。
这种方法比较简单,但书写效果可能不佳,特别是在书写大量汉字时,会使程序冗杂。
机器人动力学控制方法:这种方法是通过控制机械手臂在已知的运动轨迹条件下运动,反过来求解对应机械臂关节间的角度以达到控制的目的。
这种方法需要考虑动力学和不确定性带来的复杂性,例如由机器人机械臂中的非线性和耦合引起的动力学的挑战,以及由不确定性(如动力学参数的不精确性、关节的柔性、驱动动力学、摩擦、传感噪声等)引起的问题。
智能控制方法:这种方法利用计算机技术,例如使用机器学习、人工智能等技术,对写字机的运动进行控制。
这种
方法能够让写字机自动识别书写内容,并自动调整写字机的运动,以达到更好的书写效果。
这些控制算法各有优缺点,具体使用哪种算法取决于写字机的应用场景和性能要求。
例如,对于需要大量重复书写的场景,坐标计算控制方法可能更为合适;对于需要较高书写质量的场景,机器人动力学控制方法和智能控制方法可能更为合适。
机器人运动参数
机器人运动参数机器人运动参数是机器人运动控制中的重要概念,它描述了机器人的运动轨迹、速度、加速度等运动特性。
在机器人的设计与控制中,运动参数的设置将直接影响机器人的机械性能、控制精度和效率等各方面。
1. 运动轨迹机器人的运动轨迹是机器人运动过程中机器人关节的位置变化轨迹,也是机器人控制中调整关节角度的目标轨迹。
针对不同的处理任务,机器人的轨迹设计方法也各不相同,一般包括以下三种:(1) 基于约束的轨迹设计这种设计方法依据处理任务的要求,根据机械结构的约束条件建立运动轨迹。
例如,机器人在焊接工作时一般采用的是圆弧、直线等路径,这些路径符合焊接头的运动要求,也考虑到了安全性和效率等因素。
逆运动学法是根据机器人运动要求推算每个关节角度的控制方法。
这种方法可以通过工具端的运动轨迹反向推算出每个关节的角度,然后再进行控制。
这种方法虽然较为复杂,但能够在处理精度和速度等方面取得理想的效果。
示教是通过人机交互的方式,将操作者的手动动作转化成计算机可以理解的指令。
这种方法可以使机器人快速的完成任务,而且操作者可以直接通过示教来进行控制,操作更加人性化,因此在教育和工业现场广泛采用。
2. 运动速度机器人的运动速度是机器人执行任务的重要参数之一。
运动速度包括关节速度和末端工具速度两种,这两种速度互相联系,同时也会受到运动轨迹的影响。
(1) 关节速度关节速度是机器人每个关节运动的角速度,它的大小取决于轨迹的设计和机器人的机械性能。
对于一些精度要求高,速度要求较低的工作,关节速度可以适当减小,在加工质量和稳定性方面更有优势。
(2) 末端工具速度末端工具速度是机器人执行工作时末端工具的速度,包括线速度和角速度。
机器人可以通过改变各个关节的速度比例或者改变关节速度来控制末端工具的速度。
机器人在运动中需要具有一定的加速度能力,这可以提高机器人在执行任务时的速度和准确性。
机器人的加速度可以分为关节加速度和末端运动加速度。
关节加速度是机器人每个关节运动的加速度大小,这个值与机器人的机械结构和轨迹设计有关。
工业机器人主要技术参数

工业机器人主要技术参数
工业机器人的主要技术参数包括以下几个方面:
1. 负载能力:表示机器人能够承载的最大负荷重量,一般以千克(kg)为单位。
负载能力决定了机器人能够处理的工件的尺寸和重量范围。
2. 动作范围:表示机器人能够在工作空间内进行的运动范围。
动作范围通常用关节角或笛卡尔坐标来描述,决定了机器人能够覆盖的工作区域。
3. 重复定位精度:表示机器人在连续进行相同动作时的定位精度,即重复性误差。
重复定位精度决定了机器人在进行高精度任务时的可靠性。
4. 运动速度:表示机器人在各个轴向上的最大运动速度,一般以米/秒(m/s)或度/秒(°/s)为单位。
运动速度决定了机器人在工作过程中的效率和生产能力。
5. 控制精度:表示机器人在进行轨迹控制时的精度,即控制误差。
控制精度决定了机器人能够执行精确的工作任务的能力。
6. 自动化程度:表示机器人的自动化程度,包括是否具有自动化装置、自动识别和调整功能等。
自动化程度越高,机器人能够独立完成更多的工作。
7. 安全性能:表示机器人的安全性能,包括是否具有安全保护
装置、碰撞检测和紧急停止功能等。
安全性能决定了机器人在工作过程中是否能够保障操作人员的安全。
这些技术参数可以根据具体的机器人类型和应用场景进行选择和调整,以满足不同的工业生产需求。
机器人技术参数
3.工作速度
工作速度是指机器人在工作载荷条件下、匀速运动过程中,机械接 口中心或工具中心点在单位时间内所移动的距离或转动的角度。
确定机器人手臂的最大行程后,根据循环时间安排每个动作的时间, 并确定各动作同时进行或顺序进行,就可确定各动作的运动速度。
如图所示为球(极)坐标机器人,具有5个自由度。
R3 P
R4 R2 R1
图球(极)坐标机器人自由度
特点:灵活性好,工作空间大。
4) 关节机器人
(1)SCARA型关节机器人 SCARA型关节机器人有4个自由度,如图所示。
R
2
R
1
P
R
3
SCARA型关节机器人自由度
特点:适用于平面定位,在垂直方向进行装配作业。
机器人所具有的自由度数目及其组合不同,则其运动图形不同;而自由 度的变化量(即直线运动的距离和回转角度的大小)则决定着运动图形的 大小。如表2-1。
a) 垂直串联多关节机器人 MOTOMAN MH3F
b) 水平串联多关节机器人 MOTOMAN MPP3S
特别注意:装上末端执行器以后,需要同时保证工具的姿态,实际可达 空间会比厂家给出的要小一层。
机器人臂部位置 在xO1y面内有三个独立运动 • 升降(L1)、伸缩(L2)、和转动
(Φ1),腕部在xO1y面内有一个 独立的运动 • 转动(Φ2)。 机器人手部位置 需要一个独立变量 • 手部绕自身轴线O3C的旋转Φ3。
目前,焊接和涂装作业机器人多为 6 或 7 自由度,而搬运、码垛和装 配机器人多为 4~6 自由度。
分配动作时间除考虑工艺动作要求外,还要考虑惯性和行程大小、 驱动和控制方式、定位和精度要求。
智能自动绘图写字机器人
智能自动绘图写字机器人智能自动绘图写字机器人是一种结合了人工智能和机器人技术的创新产品,它可以根据用户输入的文字或图案,自动绘制或书写。
这种机器人可以应用在多个领域,包括艺术创作、设计制图、教育培训等领域,为用户提供便利和创新的体验。
智能自动绘图写字机器人的原理是借助人工智能技术进行语义理解和图像识别,通过对输入的文字或图案进行分析,然后控制绘图设备进行绘制或书写。
这种机器人通常会配备高精度的绘图设备,可以实现各种细致的笔触和线条,同时还能够根据用户的需求进行自动调整,保证绘制的品质和准确性。
在艺术创作领域,智能自动绘图写字机器人可以成为艺术家的得力助手。
艺术家可以通过输入自己的创作灵感或者绘图构思,让机器人帮助自己实现绘制。
这样一来,艺术家可以更加专注于创作的灵感和表达,而不需要花费过多的精力和时间在绘制的过程中。
智能自动绘图写字机器人还可以帮助一些身体受限的艺术家,比如患有手部残疾的人,通过这种机器人也能够实现自己的艺术创作。
在设计制图领域,智能自动绘图写字机器人也具有广泛的应用前景。
它可以帮助设计师和工程师将自己的设计图案转化为数字化的绘图文件,从而提高工作效率和准确性。
通过与CAD等设计软件进行连接,机器人可以实现自动识别和转化设计图稿,将设计师的创意快速呈现在纸面上。
这对于需要频繁修改和调整设计图稿的行业来说,能够大大提高生产效率和节约人力成本。
智能自动绘图写字机器人的问世,无疑为人们的生产生活带来了更多的便利和创新。
它不仅可以实现自动化的绘图和书写,还可以帮助一些特殊群体和行业实现更多的可能性。
随着人工智能和机器人技术的不断发展,相信这种机器人在未来会有更加广阔的应用前景,为人们的生产生活带来更多的便利和创新。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 - sθ1 ox + cθ1 oy
- az
- sθ1 ax + cθ1 ay
- pz + d1
- sθ1 p x = + cθ1 py
0
0
0
1
- cθ2 cθ4 + θs 2θs 4 cθ2θs 4 + θs 2 cθ4 0 - a4(- cθ2 cθ4 + θs 2θs 4) - Rθs 2
cosθ1 0 - sinθ1 0
01 A =
sinθ1 0
0 -1
co sθ1 0
0 d1
(1)
00
0
1
cosθ2 0 - sinθ2 0
12 A = sinθ2 0
cosθ2 0
(2)
0 -1 0 0
00
01
-1 0 0 0
23 A =
0 0
0 -1 0 -1 0 R
(3)
0 0 01
cosθ4 - sinθ4 0 - a4cosθ4
3) 利用文字点阵信息进行矢量化 。文字点阵信息 可以通过如下方式获得 :通过 VC + + 的控件读取计算 机显示缓冲区内的字符的点阵信息 ; 利用有些排版系 统 ,如早期 WPS 印刷系统的打印输出文件 3 . spt 内含 的文字的点阵信息 , 再进行矢量化 ; 利用点阵字库如 UCDOS 或其他公司的点阵字库 。
写字机器人有 3 个谐波传动转动关节和一个丝杆 移动关节 ,其控制系统结构如图 4 所示 ,控制系统组成 有 : 硬 件 由 高 档 PC 计 算 机 ( TCL ,CPU2. 4 G , RAM256) ,运动控制卡 (台湾研华 PCI1240 4 轴数字式 运动控制卡) ,步进电机 (四通公司 42B YG250C ,步距 角 0. 9°/ 1. 8°) , 步 进 电 机 驱 动 器 ( 四 通 公 司 SH 20402A 驱动器 ,64 细分) 等 。
人的运动方程 ,能够进行机器人的轨迹规划 、控制等 。
关键词 :写字机器人 ;机器人运动学 ;文字矢量化
中图分类号 : TH112
文献标识码 :A
机器人是具有广泛市场前景的产品 ,已开始在工 业 、军事 、医药 、家庭等领域应用 ,机器人本身是集计算 机 、电子 、机械 、人工智能的高新技术产品 ,是国家科技 部 863 的主题项目 。当人们由计算机键盘输入写字指 令后 ,写字机器人可以写出中文 、英文以及键盘上所有 的文字和符号 ,如果开发相应的软件 ,它还可以绘图 。
解 ;总结了当前 CAD/ CAM 中文字处理现状 ;由于直接分析 T TF 字体的文件格式并读出每个字的轮廓
矢量是相当困难的 ,因此采用调用 API 函数 Get Glyp hOutline 读取 windows 系统下 T TF 矢量字体的轮
廓矢量或者位图 。采用自编程序对点阵单线字体进行了矢量化 。根据矢量化后的几何数据及写字机器
图 4 控制系统结构
图 3 目标坐标系与基座坐标系的关系
用01 A - 1 左 乘 式 (5) ,
同时带4
T
=
1 2
A
2 3
A 34
A
,得
:
cθ1 n x
cθ1 ox
cθ1 ax
cθ1 px
+ sθ1 ny + sinθ1 oy + sθ1 ay + sθ1 py
- nz
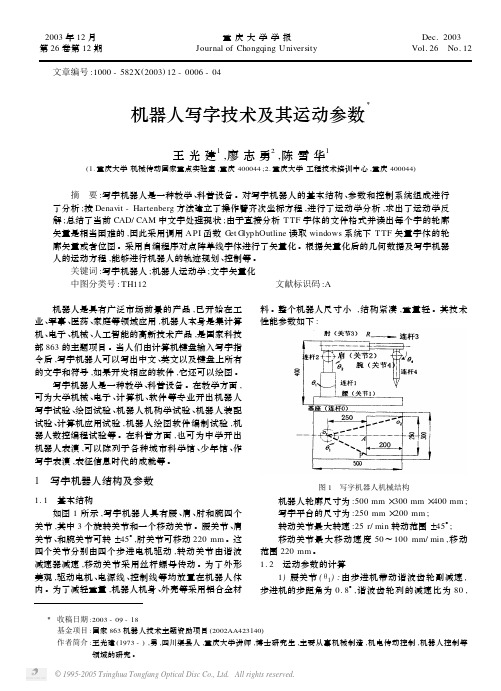
料 。整个机器人尺寸小 ,结构紧凑 ,重量轻 。其技术 性能参数如下 :
图 1 写字机器人机械结构
机器人轮廓尺寸为 :500 mm ×300 mm ×400 mm ; 写字平台的尺寸为 :250 mm ×200 mm ; 转动关节最大转速 :25 r/ min 转动范围 ±45°; 移动关节最大移动速度 50~100 mm/ min ,移动 范围 220 mm 。 1. 2 运动参数的计算 1) 腰关节 (θ1) : 由步进机带动谐波齿轮副减速 , 步进机的步距角为 0. 8°, 谐波齿轮列的减速比为 80 ,
1 写字机器人结构及参数
1. 1 基本结构 如图 1 所示 ,写字机器人具有腰 、肩 、肘和腕四个
关节 ,其中 3 个旋转关节和一个移动关节 。腰关节 、肩 关节 、和腕关节可转 ±45°,肘关节可移动 220 mm 。这 四个关节分别由四个步进电机驱动 ,转动关节由谐波 减速器减速 ,移动关节采用丝杆螺母传动 。为了外形 美观 ,驱动电机 、电源线 、控制线等均放置在机器人体 内 。为了减轻重量 ,机器人机身 、外壳等采用铝合金材
Ξ 收稿日期 :2003 - 09 - 18 基金项目 :国家 863 机器人技术主题资助项目 (2002AA423140) 作者简介 :王光建 (1973 - ) ,男 ,四川渠县人 ,重庆大学讲师 ,博士研究生 ,主要从事机械制造 ,机电传动控制 ,机器人控制等 领域的研究 。
© 1995-2005 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
2 000 r/ min ×4 mm = 8 000 mm/ min 通常移动速度采用 50 ~ 100 mm/ min 。 横臂最大伸缩量 :如图 1 所示 ,横臂最短为 OA = 250 mm ,考虑到笔尖要向下移动 50 mm 后 ,横臂最长
为 : | o1 o2 | 2 + 502 = 470 mm ,则 470 - 250 = 220 mm 。
- sθ2 cθ4 - cθ2θs 4 θs 2θs 4 - cθ2 cθ4 0 - a4(- θs 2 cθ4 - cθ2θs 4) + Rcθ2
0
01
0
0
00
1
当θ4 = 90°- θ2 时 ,则上式右边 =
0 1 0 - R sinθ2
- 1 0 0 a4 + Rcosθ2
0 01
0
0 00
1
其中 : cθi = cosθisθi = sinθi
在等式两边第四列对应列方程 :
cosθ1 px + sinθ1 py = - R sinθ2
(8)
d1 = a4 + Rcosθ2
(9)
- sθ1 p x + cθ1 py = 0
(10)
解方程组得机器人四个关节变量解 :
图 5 控制过程图
其控制过程为如图 5 所示 。
2003 年 12 月 第 26 卷第 12 期
重庆大学学报 Journal of Chongqing U niversity
文章编号 :1000 - 582X(2003) 12 - 0006 - 04
机器人写字技术及其运动参数 Ξ
Dec. 2003 Vol. 26 No . 12
王 光 建1 ,廖 志 勇2 ,陈 雪 华1
第 26 卷第 12 期 王光建 等 : 机器人写字技术及其运动参数
7
由此可求步进电机一个脉冲时 ,笔尖在最远点 o2 处在 圆周上的切向位移为 :
0. 8
×1 80
×π 180
×|
o1 o2 |
=
0. 08
mm
对于写字精度来讲 ,这个精度是可以的 。
腰关节最大转速的计算 : 当步进电机以最高转速
4) 腕关节 (θ4) :由于需要保持笔夹始终垂直于纸 面 ,在笔尖上端装有与肩同样的关节 。由图 1 可知 , 腕 的转角增量θ4 等于 θ2 的增量 ,他们转速也相等 。
2 写字机器人运动学分析
2. 1 写字机器人齐次坐标系的建立 按 Denavit - Hartenberg 方法建立操作臂运动学
工作台垂直 , 因此连杆变量 θ2 与 θ4 增量相等方向相 反 , 关系为 :θ4 = 90 - θ2 这样还可以对 T 矩阵进一步 简化 。在 T 矩阵中以θ4 = 90 - θ2 代入式 (4) ,得简化的
© 1995-2005 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
=
±26. 6°。腰关节的设计最大转
角为 ±40°,能够实现这个角度 。
2) 肩关节 (θ2) : 它由步进机带动谐波齿轮副减
速 ,则步进电机一个脉冲时 , 笔尖在 Z 方向的位移为
(当笔尖处在最近点 A 时) :
0. 8°×810
×π 180
×|
oA
|
=
0. 04
mm
由于笔尖写字时 ,要保证笔尖接触到纸面 ,并有一定的
写字机器人是一种教学 、科普设备 。在教学方面 , 可为大学机械 、电子 、计算机 、软件等专业开出机器人 写字试验 、绘图试验 、机器人机构学试验 、机器人装配 试验 、计算机应用试验 ,机器人绘图软件编制试验 ,机 器人数控编程试验等 。在科普方面 ,也可为中学开出 机器人表演 ,可以陈列于各种城市科学馆 、少年馆 、作 写字表演 ,表征信息时代的成就等 。
压力 ,为此 ,在夹持笔尖的笔夹上 , 装有弹簧调节此压
力 ,此位移不重要 。
3) 肘关节 ( R) : 由步进电机直接带动滚珠丝杆 ,
丝杆的螺距为 4 mm ,得一个脉冲时位移 :
0. 8°×3640°= 0. 008 mm 当步进电机最大转速为 2 000 r/ min 时 ,横臂最大伸缩 速度 :
8
重 庆 大 学 学 报 2003 年
T 矩阵如下 :
04 A
=
0 3
A
3 4
A
=
0 1
A
1 2
A
2 3
A
3 4
A