ABB机器人IO定义
ABB机器人IO信号设定教程
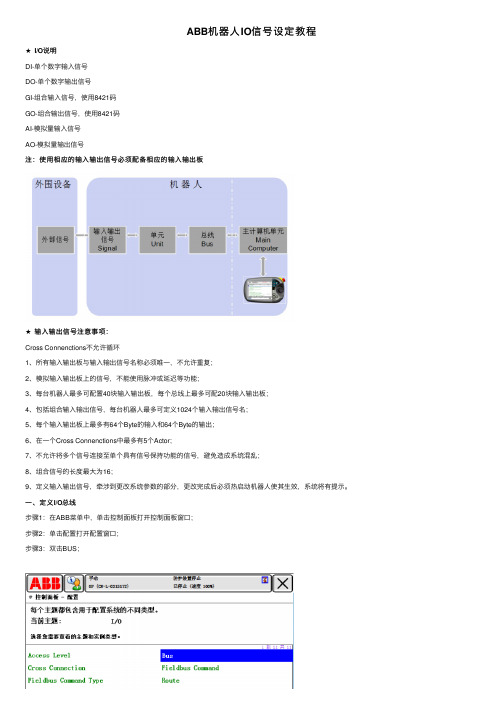
ABB机器⼈IO信号设定教程★ I/O说明DI-单个数字输⼊信号DO-单个数字输出信号GI-组合输⼊信号,使⽤8421码GO-组合输出信号,使⽤8421码AI-模拟量输⼊信号AO-模拟量输出信号注:使⽤相应的输⼊输出信号必须配备相应的输⼊输出板★输⼊输出信号注意事项:Cross Connenctions不允许循环1、所有输⼊输出板与输⼊输出信号名称必须唯⼀,不允许重复;2、模拟输⼊输出板上的信号,不能使⽤脉冲或延迟等功能;3、每台机器⼈最多可配置40块输⼊输出板,每个总线上最多可配20块输⼊输出板;4、包括组合输⼊输出信号,每台机器⼈最多可定义1024个输⼊输出信号名;5、每个输⼊输出板上最多有64个Byte的输⼊和64个Byte的输出;6、在⼀个Cross Connenctions中最多有5个Actor;7、不允许将多个信号连接⾄单个具有信号保持功能的信号,避免造成系统混乱;8、组合信号的长度最⼤为16;9、定义输⼊输出信号,牵涉到更改系统参数的部分,更改完成后必须热启动机器⼈使其⽣效,系统将有提⽰。
⼀、定义I/O总线步骤1:在ABB菜单中,单击控制⾯板打开控制⾯板窗⼝;步骤2:单击配置打开配置窗⼝;步骤3:双击BUS;步骤4:单击添加增加总线;步骤5:按住Type of Bus选择总线类型(如DeviceNet);步骤6:按住connector ID选择总线实际安装的位置(如First Board);步骤7:DeviceNet master address允许值为0-63的整数,⽤于DeviceNet⽹络中的其他设备通讯;步骤8:完成所需配置后点击确定,并在弹出的重新启动对话框中点击是完成定义。
定义完毕需要热启动,否则更改不会⽣效⼆、定义I/O单元步骤1:在ABB菜单中,单击控制⾯板窗⼝;步骤2:单击配置打开配置窗⼝;步骤3:双击Unit;步骤4:单击添加增加单元;步骤5:单击Name定义输⼊输出单元名称;在系统内名称不允许重复,第⼀位必须为字母,由字母、数字、下划线组成,最长16位字符。
ABB机器人的IO通信

引言:ABB的IO通信是指ABB与外部设备之间进行输入输出数据传输的一种方式。
IO通信在工业自动化领域中扮演着重要的角色,它能够实现与其他设备之间的数据交换,从而实现自动化生产过程的高效性和灵活性。
本文将介绍ABB的IO通信的相关概念、原理以及具体应用。
概述:IO通信在ABB中扮演着重要的角色,它能够使与外部设备之间实现数据的输入输出。
通过IO通信,ABB可以与传感器、执行器、PLC等设备进行连接,实现更加智能化、高效化的自动化生产。
在本文接下来的内容中,我们将详细介绍ABB的IO通信的工作原理、常见的应用场景以及具体实施步骤。
正文内容:1.IO通信的工作原理1.1数字信号处理1.1.1理解数字信号处理的概念1.1.2数字信号处理的主要方法和技术1.2通信协议1.2.1常见的IO通信协议介绍1.2.2选择合适的通信协议的考量因素1.3硬件连接1.3.1IO模块的选择和配置1.3.2连接不同设备的硬件连接方式2.IO通信的应用场景2.1传感器接口2.1.1温度传感器的接口方式2.1.2压力传感器的接口方式2.1.3光电传感器的接口方式2.2执行器接口2.2.1电机驱动器的接口方式2.2.2气缸控制的接口方式2.2.3伺服驱动器的接口方式2.3PLC接口2.3.1与PLC进行数据交换的接口方式2.3.2PLC与的联动控制方式2.4监控系统接口2.4.1与监控系统实现数据共享的接口方式2.4.2监控系统对IO通信的应用案例3.ABB的IO通信实施步骤3.1硬件配置3.1.1选择适当的IO模块3.1.2连接IO模块和外部设备3.2软件配置3.2.1使用ABB的IO配置工具3.2.2配置IO通信的参数和通信协议3.3测试与调试3.3.1IO通信的功能测试3.3.2调试IO通信中的问题4.IO通信的优势和挑战4.1优势4.1.1实现与外部设备的高效数据交换4.1.2提升自动化生产的灵活性和智能化程度4.2挑战4.2.1技术复杂性和成本考量4.2.2通信稳定性和可靠性的要求5.总结IO通信在ABB中扮演着重要的角色,它实现了与外部设备之间的高效数据交换。
项目一-ABB机器人IO板配置(二)
⑫双击“Maximum logical Value”, 然后输入“10”,
单击“确定”。
定义模拟输出信号ao1
定义模拟输出信号ao1的操作步骤:
⑬双击“Maximum Physical Value”, 然后输入“10”,
单击“确定”。
⑭双击“Maximum Bit Value”,输 入“65535”,单
①单击“控制面 板”,进入到控
制面板界面。
②选择“配置”。
③双击“Signal” 项。
④进入到如图所示 界面,单击“添 加”。
定义模拟输出信号ao1
定义模拟输出信号ao1的操作步骤:
⑤双击参数进行 修改,首先双击
“Name”。
⑥输入“ao1”, 然后单击“确 定”。
⑦然后双击 “Type of Signal”,选择 “Analog Output”。
击“确定”。
⑮单击“确定”, 完成设定。
⑯单击“是”,重 启控制器使更改生
效。
总结
通过学习,掌握定义数字输出信号do1和模拟输出信号ao1的操作流程。
32
说明 设定数字输入信号的名字 设定信号的种类 设定信号所在的I/O模块 设定信号所占用的地址
定义数字输出信号do1
定义数字输出信号do1的操作步骤:
①单击“控制面 板”,进入到控制
面板界面。
②选择“配 置”。
③双击 “Signal”项。
④进入到如图所示 界面,单击“添
加”。
定义数字输出信号do1
设定值 ao1
Analog Output Board10 0-15 Unsigned 10 10 65535
说明 设定模拟输出信号的名字 设定信号的类型 设定信号所在的I/O模块 设定信号所占用的地址 设定模拟信号属性 设定最大逻辑值 设定最大物理值 设定最大位置
ABB机器人IO信号配置介绍
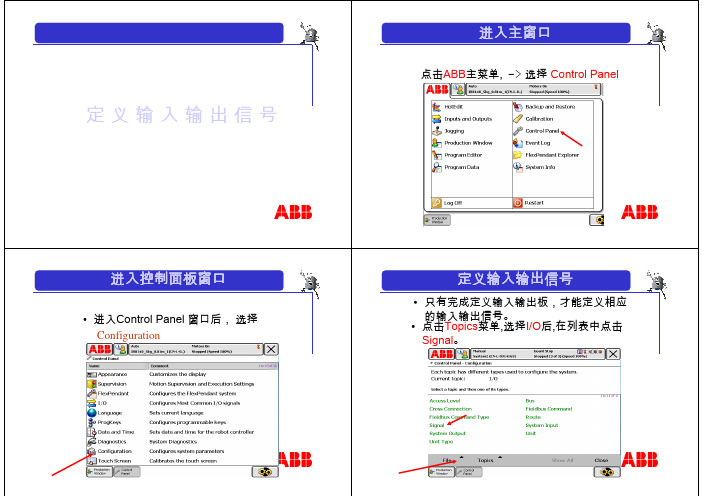
进入主窗口点击ABB主菜单, -> 选择 Control Panel定义输入输出信号进入控制面板窗口• 进入Control Panel 窗口后, 选择 Configuration定义输入输出信号• 只有完成定义输入输出板,才能定义相应 的输入输出信号。
• 点击Topics菜单,选择I/O后,在列表中点击 Signal。
定义输入输出信号• 点击Add, 增加输入输出信号。
定义输入输出信号• Name-信号名称。
按住Name进入文本编辑窗口,定义输入输 出信号名称,在系统内名称不允许重复, 第一位必须为字母,最长 16 位字符。
定义输入输出信号• Type of signal-输入输出信号的类型。
按住Type of signal, 在出现的列表中选择相 应的信号类型。
定义输入输出信号• Assigned to unit-分配输入输出板。
按住Assigned to unit,在列表中选择相应的 输入输出板。
定义输入输出信号• Unit mapping -映射物理端口。
按住该选项,进入输入窗口输入相应的映射 端口号.与输入输出板的特性相关。
定义输入输出信号• Access level 按住Access level,在列表中选择相应的 Access level 。
定义数字输入信号-DI 及GI• Filter time passive-低电平保持时间。
按住该选项进入输入窗口,输入相应值。
在机器人运动前,输入值 0 必须保持相应 时间,单位毫秒,最小 10毫秒 ( 默认 ),最 大 32 秒。
定义数字输入信号-DI 及GI• Filter time active-高电平保持时间。
按住该选项进入输入窗口,输入相应值。
在机器人运动前,输入值 1 必须保持相应 时间,单位毫秒,最小 10毫秒 ( 默认 ),最 大 32 秒。
定义数字输入信号-DI 及GI• Invert physical value -信号倒置。
ABB机器人IO配置一

04
对数据传输进行实时监 控和故障诊断,及时发 现并解决数据传输过程 中的问题。
05
安全防护与操作规范
电气安全防护措施
使用符合规格的电缆和连接器
隔离电气部件
确保电缆和连接器能够承受所需的电流和电 压,并具有足够的机械强度。
将电气部件与操作人员隔离,使用防护罩、 绝缘材料等。
定期检查电气系统
遵守静电防护规范
IO配置可以用于机器人程序的控制,例如通过输入信号触 发机器人程序的执行,或者通过输出信号控制外部设备的 动作。
安全保护 IO配置还可以用于机器人的安全保护,例如通过配置安全 门信号,确保机器人在安全门关闭时停止运行,从而保障 操作人员的安全。
基本概念和术语
信号类型
指输入输出信号的种类,如数字 信号、模拟信号等。
信号地址
指输入输出信号在机器人系统中 的唯一标识,用于区分不同的信 号。
信号参数
指输入输出信号的参数设置,如 信号的电平、频率等。
IO板卡
指机器人系统中用于处理输入输 出信号的硬件设备,通常具有多
个输入输出通道。
02
硬件连接与接口
机器人控制器接口类型
01
02
03
标准I/O接口
包括DeviceNet、 Profibus、Profinet、 EtherNet/IP等,用于与 外部设备进行通信。
无线连接
采用无线通信技术连接外 部设备,适用于移动机器 人等场景。
电缆选择与布线规范
电缆类型选择
根据传输信号类型、距离和环境条件 选择合适的电缆,如屏蔽电缆、双绞 线等。
布线规范
电磁兼容性考虑
在布线过程中考虑电磁兼容性问题, 避免干扰和噪声对信号传输的影响。
认识ABB机器人的标准IO信号板-DSQC652

认识ABB机器⼈的标准IO信号板-DSQC652机器⼈通常需要接收其它设备或传感器的信号才能完成指派的⽣产任务,⽐如:要将板链上某个货物搬运到另⼀个地⽅,⾸先就要确定货物是否到达了指定的位置,这就需要⼀个位置传感器(到位开关)。
当货物到达指定位置后,传感器给机器⼈发送⼀个信号。
机器⼈接到这个信号后,就执⾏相应的操作,⽐如按照预定的轨迹开始搬运。
对机器⼈⽽⾔,到位开关的这种信号,属于数字量的输⼊信号。
在ABB机器⼈中,这种信号的接收是通过标准IO信号板来完成的。
标准IO信号也称为信号的输⼊/输出板,安装在机器⼈的控制柜中。
常见的ABB机器⼈标准IO信号板包括DSQC651、DSQC652、DSQC653等(不⼀⼀列举了)。
今天这篇⽂章,我们以QSDC652为例,来认识下ABB机器⼈的标准IO信号板。
⾸先,我们来看看DSQC652的外观,如下图:DSQC652是⼀款16点数字量输⼊和16点数字量输出的IO信号板,上图中的X1和X2是数字量输出端⼦,X3和X4是数字量输⼊端⼦。
每个接线端⼦有10个接线柱,对于信号输出X1和X2⽽⾔,1~8号为输出通道,9号为0V,10号为24V+;对于信号输⼊X3和X4⽽⾔,1~8号为输⼊通道,9号为0V,10号未使⽤。
X1~X4的接线端⼦的定义及分配的地址,请看下⾯的图⽚:在X1和X2的上⽅,有两排LED指⽰灯,每排⼋个,代表⼋个通道。
当某⼀通道有信号输出时,该通道的LED指⽰灯会点亮;如下图:同样,在X3和X4的下⽅,也有两排LED指⽰灯,⽤来指⽰相应通道的状态,当某⼀通道有信号输⼊时,该通道的LED指⽰灯会点亮;左边的端⼦X5⽤来连接DeviceNet总线并设置IO信号板在t总线上的地址,具体请看这篇⽂章:怎样设置ABB机器⼈标准IO板的DeviceNet总线地址?除了标准IO信号板,ABB机器⼈还⽀持RS232通信、OPC通信、Socket通信及现场总线通信(Profibus、Profinet、DeviceNet等),相关内容将在以后的⽂章中陆续介绍。
ABB机器人仿真IO设置

ABB机器人仿真IO设置
ABB机器人怎么设置I/O板
步骤:1、ABB---控制面板----选择主题I/O分配然后分为3小步:
①Unit--添加---Name----motors1( 自定义名字) 定义I/O
Type of Unit------d651----确认
Connected to Bus -----Devicevet----确认
DeviceNET Address ----63---确认(此处为地址,每一个I/O的地址不能相同)
②Signal---添加-- Name ---Di1(自定义名字) 定义哪块电路板
Type of signal ---Digital Input (可更改)
Assigned to unit---- motors1(步骤①中定义的名字)
Unit mapping ----1(一般定义为1)
③System Input --添加---Signal Name 值(选择步骤②中定义的名字)
Action-- 选择所需要执行的指令
注意:在程序中使用以上I/O指令时,I/O地址需更改数据类型为signaldi(信号) 。
疑问:加入信号后,在手动的时候程序可以正常执行,但在自动的时候会提示《I/O处理错误当前操作模式下不允许该动作,检查信号访问级别。
》这是为嘛呢?
据说可以在示教器里设置允许模拟
需要更改程序类型。
工业机器人IO信号配置

ABB工业机器人I/O信号分类
1.数字输出信号(Digital Output)
定义:机器人向外界设备输出的信号,只有0或1两种状态。
特点:当机器人向外界发送一个数字输出信号后,必然会有一个设备的状态发生改变(比如 夹爪的开/关),否则为无效输出。
对应表:
信号 DO1 DO2 DO3 DO4 DO5 DO6 DO7 DO8 DO9
对应表:
信号 DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8
地址
对应 设备
0 拨键1
1 拨键2
2 拨键3
3 拨键4
4 拨键5
5 拨键6
6 拨键7
7 拨键8
ABB工业机器人I/O信号分类
3.组输入/输出信号(Group Input/Group Output)
定义:多个数字信号的联合体,根据数字信号的个数,可以表示所有的组合状态。
警示灯亮起,程序停止; ③ 拨回拨号键1后,再次运行程序,警示灯熄灭,机器人继续搬运下一块物料。
特点:以组输入信号为主,可以将多个信号联合用于控制机器人的多种状态。
对应表:
数字信号 状态
数字大小 组输入信号
DI1 01 01
DI2 01 02
DI3
DI4
DI5
DI6
01010101
0 4 0 8 0 16 0 32
GI1=DI1+DI2+DI3+DI4+DI5+DI6+DI7+DI8
DI7 01 0 64
1.配置信号板
ABB工业机器人I/O信号配置
1.配置信号
ABB机器人IO配置及接线,很详细!收藏了!

ABB机器人IO配置及接线,很详细!收藏了!IO基本操作和接线练习说明:这里对ABB工业机器人的IO进行基本操作,机器人输入输出接线,做简单接线说明和对应操作。
基本操作包括设定为常用IO 信号,信号查看方式,信号的强制仿真,输出信号的强制输出,机器人辅助按键关联,IO接线图等。
一、设定IO信号为常用信号操作1、设定说明这里把已经建立的IO信号设定为常用信号,主要是为了方便我们在示教器输入输出中查看信号和对信号进行各种操作。
机器人断电重启以后一般会在输入输出中显示常用IO信号,手动自动状态人不干预情况下都可以显示默认状态显示的常用IO信号。
2、设定步骤(1)ABB菜单——>控制面板——>常用IO配置——>进行配置常用IO信号并应用确认,之后再在ABB菜单——>输入输出中查看——>默认查看常用信号。
(2)具体操作图片A:ABB菜单——>控制面板B:控制面板——>常用IO配置C:进行配置常用IO信号并应用确认D:在ABB菜单——>输入中查看——>默认查看常用信号D:默认查看常用信号画面二、信号查看方式1、查看路劲在ABB菜单——>输入中查看——>默认查看常用信号,一般设定常用信号以后,第一次查看信号都是看到默认设定的信号,如果开始没设定常用IO信号,则开始进去是不显示信号,直到点击右下角视图的查看方式以后才会显示对应的信号选项。
这里还有2、查看方式(1)进入常用信号画面:系统默认常用信号(2)信号查看方式:视图中按照需要查看类型选项选择(3)按信号IO设备查看图1:图2:(4)按照信号的名称、类别设置查看信号三、信号的强制仿真1、输入信号的仿真功能操作(1)仿真功能介绍ABB机器人(其他工业机器人同)的仿真功能,是对建立好的IO 信号进行虚拟仿真,可以设定对应信号为需要的设定值,但是这些信号处于仿真状态时候,设定的输出信号值对外部真实设备无效,或者输入信号不是外部真实信号有输入,信号仿真就是对信号的虚拟状态,仅仅在机器人系统编程中起作用,不对真实设备起作用,所以称为信号的仿真功能。
ABB机器人的系统IO功能详解
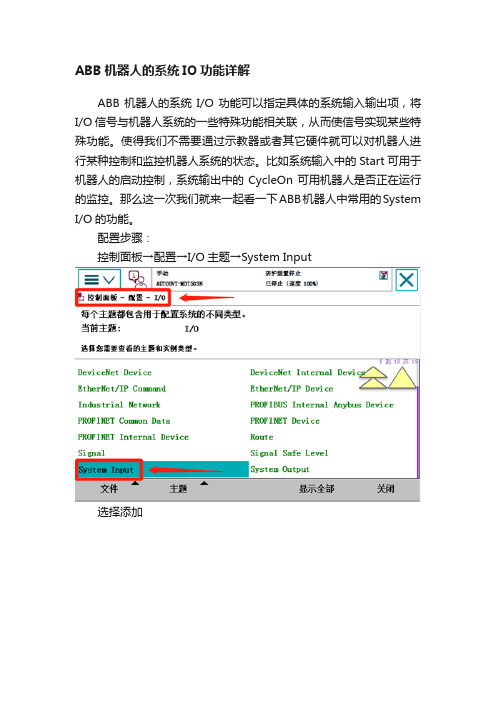
ABB机器人的系统IO功能详解ABB机器人的系统I/O功能可以指定具体的系统输入输出项,将I/O信号与机器人系统的一些特殊功能相关联,从而使信号实现某些特殊功能。
使得我们不需要通过示教器或者其它硬件就可以对机器人进行某种控制和监控机器人系统的状态。
比如系统输入中的Start可用于机器人的启动控制,系统输出中的CycleOn可用机器人是否正在运行的监控。
那么这一次我们就来一起看一下ABB机器人中常用的System I/O的功能。
配置步骤:控制面板→配置→I/O主题→System Input选择添加进行SignalName与Action值的设定。
点击确定后会提示是否重启机器人,可根据需要灵活选择现在立即重启或者在一起完成其它配置后手动进行重启。
到这里系统输入信号的配置流程演示就完成了,系统输入的其它功能的配置流程与系统输出的配置流程也与之相似,这里不再演示。
在实际应用中,Start信号应该使用Input类型信号进行关联,上边我为了演示系统输出也可以使用Output类型信号进行关联故使用了do0信号。
具体使用什么信号可以根据现场的实际情况来灵活配置。
下面我们就来看ABB机器人为我们提供的其它的系统I/O信号的值的含义。
系统输入信号系统输出信号:上述功能汇总整理基于RobotWare6.07,其它版本的RobotWare功能可能会略有增删。
由于篇幅限制,信号的详细功能请查阅ABB机器人随机光盘中所的“技术参考手册- 系统参数.pdf”,手册中对信号的作用与区别有更加详细的解释。
没有随机光盘的小伙伴可以点击下方的下载链接进行下载。
点我下载ABB机器人随机光盘文章首发自动化生产之家。
ABB机器人的IO通信

经过调研和评估,选择了ABB机器人 作为自动化改造的核心设备,因其具 有高精度、高稳定性和易编程等优点 。
IO通信方案设计思路阐述
针对生产线的实际需求,设计了 基于Profinet协议的IO通信方案 ,实现了机器人与PLC、传感器 、执行器等设备的实时数据交互
。
通过配置机器人的IO信号,实现 了对外部设备的精确控制,包括
04
网络通信技术在ABB机器人中 应用
Chapter
常见网络通信技术简介
01
Ethernet/IP
一种基于以太网的工 业通信协议,广泛应 用于自动化领域。
02
Profinet
由Profibus国际组织 推出的实时以太网标 准,适用于工业自动 化领域。
03
DeviceNet
基于CAN总线的工业 通信网络,适用于设 备级通信。
积极参加行业内的技术交流和培训活动,了解最新的技 术动态和发展趋势。
关注网络安全问题,学习相关的安全防护和漏洞修复技 术。
THANKS
感谢观看
建立完善的安全管理制度
制定完善的安全管理制度和操作流程 ,加强人员培训和管理,提高整体的 安全防护能力。
05
实际应用案例分析与讨论
Chapter
生产线自动化改造项目背景介绍
原有生产线存在效率低下、人工成本 高的问题,急需进行自动化改造以提 升生产效益。
生产线需要实现多种零部件的组装、 涂胶、检测等工艺,要求机器人能够 与各种外部设备进行IO通信,实现自 动化协同作业。
将程序划分为多个模块,每个 模块实现特定的功能。这样可 以提高程序的可读性和可维护 性,同时方便进行程序的扩展 和优化。
针对具体的应用场景和需求, 选择合适的算法和数据结构进 行优化。例如,可以采用高效 的数据处理算法和存储结构来 提高程序的运行效率。
abb机器人的+IO+通信

增强设备兼容性
通过标准化和通用的IO通 信协议,可以实现不同设 备之间的互操作性和兼容 性,降低设备维护成本。
提升自动化水平
IO通信是实现自动化生产 的重要基础,能够提高自 动化水平,减少人工干预 ,降低生产成本。
ABB机器人IO通信的历史与发展
历史回顾
ABB机器人IO通信的发展经历了从 传统模拟信号到数字信号、从单一协 议到标准化协议的演变。
智能仓储系统
智能仓储系统是ABB机器人IO通信的另一个应用场景。通过IO通信,ABB机器人 可以实现仓库的自动化管理、货物的快速存取和跟踪。
在智等设 备,实现货物的快速存取和跟踪。这不仅可以提高仓储效率,还可以降低人工错 误和提高物流效率。
04
ABB机器人IO通信的应用场景
工业自动化生产线
自动化生产线是ABB机器人IO通信的重要应用场景之一。通 过IO通信,ABB机器人可以与生产线上的各种设备进行信息 交互,实现生产线的自动化控制和协同作业。
在工业自动化生产线上,ABB机器人可以通过IO通信来控制 生产设备的启停、检测设备状态、传输数据等,从而提高生 产效率、降低人工成本、保证产品质量。
发展趋势
随着工业4.0和物联网技术的发展, ABB机器人IO通信将朝着高速、高带 宽、无线化、智能化的方向发展。
02
ABB机器人IO通信的硬件设备
输入设备
传感器
用于检测机器人周围的环 境信息,如物体位置、距 离、颜色等。
限位开关
用于检测机器人的极限位 置,防止机器人运动超出 安全范围。
接近开关
通过检测物体的接近程度 来控制机器人的运动。
RS485协议
总结词
一种长距离、多点通信的串行通信协议。
《工业机器人现场编程(ABB)》模块三 ABB工业机器人的IO通信

相关知识
将输出信号(如前面设置好的数字输出信号do1)与工业机器人系统的状态信号关联起来,便可将 其状态输出给外围设备,可作监视、控制之用。常用的工业机器人系统状态信号如表3-14所示。
表3-14 常用的工业机器人系统状态信号
相关知识
表3-14 常用的工业机器人系统状态信号(续)
相关知识
表3-14 常用的工业机器人系统状态信号(续)
任务实施(二、设置I/O信号)
2.设置数字输出信号do1 本任务中设置数字输出信号do1所使用的参数如表3-10所示。
表3-10 数字输出信号do1相关参数表
任务实施(二、设置I/O信号)
表3-11 设置数字输出信号do1
任务实施(二、设置I/O信号)
表3-11 设置数字输出信号do1(续)
任务实施(二、设置I/O信号)
表3-7 设置DSQC651板(续)
任务实施(一、设置DSQC651板)
表3-7 设置DSQC651板(续)
任务实施(二、设置I/O信号)
1.设置数字输入信号di1 本任务中设置数字输入信号di1所使用的参数如表3-8所示。
表3-8 数字输入信号di1相关参数表
任务实施(二、设置I/O信号)
表3-9 设置数字输入信号di1
任务实施(二、设置I/O信号)
表3-11 设置数字输出信号do1(续)
任务测评
表3-12 任务测评表
任务二
关联I/O信号
任务引入
工业机器人操作员小张与师傅老李配置好ABB 标准I/O板后,老李告诉小张,“虽然已经在系统中 添加并设置好了I/O板的数字输入信号和数字输出信 号,但是这两个信号对工业机器人来讲是做什么的, 我们还没有给出一个答案。因此,我们还无法通过 这两个信号来控制工业机器人和周边设备。”随后, 老李开始教小张如何将设置好的I/O信号与工业机器 人自身的控制、状态信号关联在一起,从而可以通 过I/O信号控制工业机器人和周边设备。
ABB工业机器项目一-ABB机器人IO板配置(三)
定义组输入信号gi1
(7)双击“Type of signal”,然后选择 Group Input。
(8)双击“Assigned to Device”,然 后选择“d651”。
定义组输入信号gi1
(9)双击“Device Mapping”,输入 1-4,然后单击确定。
出信号go1
(1)进入ABB主菜单,选择“控制面 板”。
(2)单击配置选项。
定义组输出信号go1
(3)双击Signal。
(4)单击添加。
定义组输出信号go1
(5)双击Name。
(6)输入go1,然后单击确定。
定义组输出信号go1
(7)双击“Type of signal”,然后选择 Group Output。
ABB机器人IO板配置(三)
主要内容
• 定义组输入信号gi1。 • 定义组输出信号go1。
定义组输入信号gi1
组输入信号的相关参数,如表所示:
参数名称 Name
Type of Signal Assigned to Device
Device Mapping
设定值 gi1
Group Input d651 1~4
定义组输出信号go1
组输出信号go1的相关参数及状态,如表所示:
参数名称 Name
Type of Signal Assigned to Device
Device Mapping
设定值 go1
Group Output d651 33~36
说明 设定组输出信号的名字 设定信号的类型 设定信号所在的I/O模块 设定信号所占用的地址
说明 设定组输入信号的名字 设定信号的类型 设定信号所在的I/O模块 设定信号所占用的地址
4.2 ABB工业机器人IO设定

设定值
ao1 Analog Output board10 0-15 Unsigned 10 10 65535
说明
设定模拟输出信号的名字 设定信号的类型 设定信号所在的IO模块 设定信号所占用的地址 设定模拟信号属性 设定最大逻辑值 设定最大物理值(V) 设定最大位值
任务三:机器人I/O设定
六、设定模拟量输出信号ao1
序号 1 2 3 4 5
型号 DSQC651 DSQC652 DSQC653 DSQC355A DSQC377A
说明 分布式I/O模块 di8、do8、ao2 分布式I/O模块 di16、do16 分布式I/O模块 di8、do8带继电器 分布式I/O模块 ai4、ao4 输送链跟踪单元
任务三:机器人I/O设定
0 1 2 3 4 5 6 7
任务三:机器人I/O设定
一、ABB机器人常用标准I/O板
3. X5端子 X5端子是DeviceNet总线接口,
端子使用定义,如表所示。 其上的编号6~12跳线用来决定
模块(I/O板)在总线中的地址,可 用范围为10~63。
X5端子编号
1 2 3 4 5 6 7 8 9 10 11 12
在调出的“控制面板 – 配置 – I/O - Signal”界 面,单击“添加”按钮
任务三:机器人I/O设定
四、设定数字量输入信号di1
在调出的“控制面板 – 配置 – I/O – Signal – 添 加”界面,双击“Name”
在调出的“Name”界面,在文本框输入“di1”,然 后单击“确定”按钮
任务三:机器人I/O设定
一、ABB机器人常用标准I/O板
3. X5端子
思考:如果你想把该节点的地址设置成20,如何处 理?
ABB机器人常见的几大数据类型
ABB机器人常见的几大数据类型ABB机器人数据存储描述了机器人控制器内部的各项属性,ABB机器人控制器数据类型多达100余种,其中常见的数据类型包括基本数据、i/o数据、运动相关数据。
1、基本数据基本数据:bool 逻辑值:逻辑状态下赋予的真或者假。
逻辑值有两种情况:成立和不成立则逻辑值为真使用true 或1表示不成立则逻辑值为假使用false或0表示byte 字节值:用于计量存储容量的一种计量单位,取值范围为(0-255)num 数值:变量、可存储整数或小数整数取值范围(-8388607~8388608)dnum 双数值:可存储整数和小数,整数取值范围(-4503599627370495~+4503599627370496)string 字符串:字符串是由数字、字母、下划线组成的一串字符。
他在编程语言中表示文本的数据类型。
stringdig 只含数字的字符串:可处理不大于4294967295的正整数2、i/o 数据dionum 数字值:取值为0或1用于处理数字i/o信号,数字i/o信号中0作为低电平0~0.7v,1作为高电平3.4~5.0vsignaldi/do 数字输入/输出信号:二进制值输入、输出如开关接通是1,断开是0signalgi/go 数字量输入/输出信号组:多个数字量输入或输出组合配合使用。
signalai 模拟量输入:例通过温度采样器采集到一个温度值,就要经过变送器转换,转换成PLC能够识别的二进制数signalao 模拟量输出:数据-变送器-执行机构3、运动相关数据robtarget 位置数据:定义机械臂和附加轴的位置robjoint 关节数据:定义机械臂各关节位置speeddate 速度数据:定义机械臂和轴移动速率,包含四个参数:v_tcp 表示工具中心点速率,单位mm/s;v_ori 表示TCP重定位速率,单位(°)/s;v_leax 表示线性外轴的速率,单位mm/s;v_reax 表示旋转外轴速率,单位(°)/szonedata 区域数据:一般也称为转弯半径,用于定义机器人轴在朝向下一个移动位置前如何接近编程位置tooldata 工具数据:用于定义工具的特征,包含工具中心点(TCP)的位置和方向,以及工具的负载wobjdata 工件数据:用于定义工件的位置及状态loaddata 负载数据:用于定义机械臂安装界面的负载4、数据存储类型ABB机器人数据存储类型分为三种CONST 常量:数据在定义时已赋予了数值,不能在程序中进行修改,除非手动修改VAR 变量:数据在程序执行过程中停止时,会保持当前的值。
ABB工业机器人编程-第四章

X3端子见表4-3
© ABB April 28, 2019
| Slide 9
4.2. ABB标准IO板卡介绍
4.2.1 ABB标准I/O板 DSQC651
X5 端子编号 1 2 3 4 5
表4-4
使用定义 0V BLACK(黑色) CAN信号线low BLUE(蓝色) 屏蔽线 CAN信号线high WHITE(白色) 24V RED(红色) GND 地址选择公共端 模块ID bit 0 (LSB) 模块ID bit 1 (LSB) 模块ID bit 2 (LSB) 模块ID bit 3 (LSB) 模块ID bit 4 (LSB) 模块ID bit 5 (LSB)
© ABB April 28, 2019
| Slide 2
第四章 ABB机器人通讯
4.1.ABB机器人通讯介绍
ABB机器人I/O通讯的种类
ABB机器人提供了丰富I/O通讯接口,如ABB的标准通讯,与PLC的现场总线通
讯,还有与PC机的数据通讯,如图,可以轻松地实现与周边设备的通信
ABB的标准I/O板提供的常用信号处理有数字量输入,数字量输出,组输入,组
工业通讯总线接口(选件), 只支持从站功能如: Devicenet、Profibus、 Profinet、EtherNet IP等
Key:使用 何种现场 总线,要 根据需要 进行选配
© ABB April 28, 2019
| Slide 5
第四章 ABB机器人通讯
4.1.ABB机器人通讯介绍
Key:
表4-8
使用定义 INPUT CH9 INPUT CH10 INPUT CH11 INPUT CH12 INPUT CH13 INPUT CH14 INPUT CH15 INPUT CH16 0V 未使用 地址分配 8 9 10 11 12 13 14 15
ABB机器人外部启动配置说明

ABB机器人外部启动配置说明一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet 现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1图1-1-1所示的界面图1-1-1单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】✍【控制面板】✍【配置】✍【Signal】✍【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
图1-2-23、创建数字输出信号DO1单击【ABB菜单】✍【控制面板】✍【配置】✍【Signal】✍【添加】显示图1-2-1所示的界面,数字输出信号DO1相关参数说明见表1-3-1择【是】,完成数字输出信号DO1的创建。
图1-3-14、创建组输入信号GI1单击【ABB菜单】✍【控制面板】✍【配置】✍【Signal】✍【添加】显示图1-2-1所示的界面,组输入信号GI1相关参数说明见表1-4-1按照表1-4-1设定,设定完毕后如图1-4-1所示,单击【确定】,提示“重启”选择【是】,完成组输入信号GI1的创建。