基于CAN总线的塑窗焊接清理生产线控制系统
基于CAN总线的智能电动车窗系统设计

基于CAN总线的智能电动车窗系统设计智能电动车窗系统是一种基于CAN总线技术的电动车窗控制系统。
它采用了先进的计算机控制技术,可以实现车辆内部的自动控制,使得车主可以方便地通过一个按钮来控制所有的车窗。
本文将详细说明该系统的设计过程及其重要组成部分,以期提高车辆驾驶的安全和舒适度。
1. 系统设计原则基于CAN总线的智能电动车窗系统的设计需要遵循一些重要的原则:(1)安全性原则:车辆应具备安全性能,应该避免发生任何意外情况。
(2)便捷性原则:车辆内部的所有电器设备都应该方便、快捷地使用,车主可以轻松地控制。
(3)可靠性原则:系统应该可以在任何天气条件下工作,以避免因环境因素而导致系统故障。
2. 系统硬件设计基于CAN总线的智能电动车窗系统需要一个主控模块、一个CAN 总线模块、若干电源模块、若干电动窗模块和若干传感器模块。
这些模块对系统的实现至关重要,其中主控模块是系统的核心组件。
主控模块负责整个系统的控制和管理,控制各个电动车窗的开关及其状态信号,通过 CAN 总线命令所有模块协同工作,实现电动车窗的开闭自动化控制。
3. 系统软件设计基于CAN总线的智能电动车窗系统的软件设计是整个系统的重要组成部分。
一般来说,软件设计具有多个模块,包括硬件模块、界面模块、功能模块等,详细设计包括了功能分析、数据处理、程序编写等主要内容。
软件的设计应该遵循国际标准,并根据用户需求进行扩展与优化。
4. 系统调试测试系统调试测试是基于CAN总线的智能电动车窗系统开发中非常重要的一部分。
在调试测试过程中,需要对硬件、软件等各个组件进行测试验证,确保系统的正常运行,避免意外发生。
同时,应该开发适当的测试工具和测试方法,以方便进行调试测试工作。
5. 系统维护基于CAN总线的智能电动车窗系统的维护是保证系统持续稳定运行的重要工作。
系统维护工作包括了硬件维护、软件维护、配置文件维护以及升级等方面,应该在使用过程中始终关注系统的运行情况,并定期进行维护工作,以植入系统的安全、可靠、高效性。
基于CAN总线的轿车车窗智能控制系统设计
基于CAN总线的轿车车窗智能控制系统设计newmaker1 引言can总线是一种有效支持分布式控制和实时控制的串行通信网络,以其高性能和高可靠性在自动控制领域得到了广泛的应用。
目前在国外中高档轿车已普遍应用了汽车总线网络技术,在国产汽车中采用can总线技术已经取得了一定进展,但受制于技术和成本等问题的限制,整体水平比较落后。
作为目前最具应用潜力的车载现场总线,can总线技术可为我国汽车产业升级、进一步降低成本,扩大市场占用率提供支持。
现在各中高档轿车都安装了电动车窗,按下按钮就可以控制车窗玻璃的升降。
如果车窗没有智能,司机在没有注意到乘客的手或物体伸出窗口,就容易被上升的玻璃夹伤。
为了安全起见,现在很多乘用车都采用了电动防夹车窗。
在国外,电动防夹车窗已作为强制性标准应用在汽车上。
与此同时,司乘人员面对防抢防盗和遇难脱险等意外事故时必须对车窗实行强制开启或关闭。
本文是在贵州省科技厅工业攻关项目“汽车电动车窗can总线控制系统的开发”(黔科合gy字[2008]3032)资助下,充分研究了有关can总线在汽车电子系统中的应用和电动车窗防夹方案,提出了一种基于can总线的轿车车窗智能控制系统的研究方案,可以实现车窗在正常工作模式下具有防夹控制功能和紧急情况下(异常工作模式)快速升降车窗控制功能,使在整车环境下车窗的控制管理更趋向智能化和人性化,提高汽车电子的安全性、灵活性和可靠性。
2 系统功能结构2.1 can总线通信实现原理can总线属于多路复用总线的一种,最早是由德国bosch公司研制的主要用于汽车电器系统控制的总线规范。
它采用非破坏总线仲裁技术,多种方式工作,直接通信距离最远可达10km,通信速率最高可达1mbps,帧消息采用crc校验和其他检错措施,具有自动关闭错误严重的节点功能。
can节点通过报文的标识符滤波实现数据传输,有不同的优先级满足不同的实时要求,节点数取决于总线驱动电路,通信介质可为双绞线、同轴电缆或光纤,选择灵活。
基于Profibus现场总线的塑料膜片生产线控制系统

切换流畅 ,图像 清晰 明亮 ,性 能稳定可 靠 ,具有 良好
的性 价 比 。
动挤出机 ,1台 A S 5 用 来驱动 磨头 ,2台 A S 5 C 50 C 50 用来做一级牵引和二级牵引 ,3台 A S 0 C 80用来驱动 3
个 卷取 滚 筒 。
垫堂 3 镜 辊 一 牵引 二 牵 3 卷曲 个 面 级 级 引 台 轴
电工技术 l0 0l1 l 1 1 期 4 2 9
现 场 总线
如 图 3所示 。
O l安装 到 变频 器 上 。 ( ) 照 RP A- 1适 配 器 模 块 的用 户 手 册 调 整 硬 2按 B 0
件 ( 站 号 ,终 端 电阻 等 ) 如 。
( )将 参 数 9 . 2( o m. d l Ln ) 为 3 8 0 C m Mo u ik 改 e
2 2 控制 原理 .
控制 系统构 成 如 图 2所示 ,该 系统 通信 协 议设
计 为主/ 方 式 ,S —0 L 从 73 0P C作 为 主 站 ,变 频 器作
为从 站 ,主站 向变频 器 传送 控 制 指令 ,同时 接受 变
频 器反馈 的运行 状态 及 运行 参 数 。变 频 器 与 R B - P A 0 通信 适配器模 块相连 ,接 入 P oi s P网作为从 l rf u~ b D 站 ,接收 从 主 站 SMA C S —1 -D I TI 73 52 P发 来 的控 制 命令 。R B -1 P A 0 通信 适配器 模块将 从 Po b s P网 rf u— i D 中接 收到 的过 程 数 据存 人 双 向 R AM 中,再 由变 频 器将 R AM 中的 数据 写 入 控 制字 、设 定 值 或读 出实 际值 、诊 断信 息等 参 量 ,从 而 使 变频 器 能够 按 照指
基于CAN总线的汽车电动车窗控制系统设计

基于CAN总线的汽车电动车窗控制系统设计基于CAN总线的汽车电动车窗操纵系统设计THE DESIGN OF CONTROL SYSTEM ABOUT AUTOMOBILE POWER WINDOWS BASED ON THE CANBUS学院(部):机械工程学院专业班级:学生姓名:指导教师:2020 年06 月06 日基于CAN总线的汽车电动车窗操纵系统设计摘要随着2009年汽车产销量突破1300万。
我国差不多一跃成为全球最大的汽车市场。
据统计,电子元器件的价值平均占到整车价值的三成左右。
概而观之,我国汽车电子的需求是庞大的。
在这种庞大的需求求的拉动下,我国汽车电子市场也迎来了飞速进展的时代。
当前,汽车电子的一个进展趋势确实是网络化。
由于电子装置和电子元件在汽车内的应用越来越多,使汽车的布线空间越来越小。
在有线的空间内完成各个电子装置的有效连接,关于传统的点对点式的连接方式来说,是不可能完成的任务。
因此,传统的连接方式成为制约汽车电子进展的一个瓶颈。
这种情形下,汽车操纵网络应时而生。
汽车操纵网络是把应用于互联网上专门成熟的局域网技术应用到汽车内,如此,汽车内各个电子器件只要挂接在同一条总线上,就能够实现器件或装置之间的相互通信了。
如此就解决了由于原件连接过多造成的线束臃肿问题,开创了汽车电子器件热插拔的先河,而且方便了汽车的升级和爱护。
本论文对应用于车身网络中的CAN协议进行了研究,基于CAN总线设计了一种电动车窗操纵系统。
关键词: CAN总线,汽车电子,电动车窗THE DESIGN OF CONTROL SYSTEM ABOUT AUTOMOBILE POWER WINDOWS BASED ON THE CANBUSABSTRACTWith China’s automobile production and sales in 2009 breaking 13 million, China has become the world’s largest automobile market. According to statistics, the average value of electronic components can account for the value of the vehicle about three percent. Overview, China’s demand for automotive electro nics is huge. With the huge demand, China’s automotive electronics market ushered in the era of rapid development.Currently, a trend of automotive electronics is networking. As more and more electronic devices and electronic components are used in automotive, the inside space of automotive is becoming smaller and smaller. In such a limited space to complete the connection of various electronic devices, it is impossible for the traditional point to point connection type. Therefore, the traditional connection of electronic devices has become a bottleneck in the development of automotive electronics. In this case, the vehicle control network has emerged to solve this problem. Vehicle control network is to apply a very sophisticated Internet technology to the car, as long as the various electronic devices of the car are articulated in the same bus, the devices can communicate with each other through the bus. This will resolve the problem of connecting too many electronic components as a result of the cumbersome wiring harness, but also created a vehicle electronic devices hot swap of the ground, to facilitate the upgrading and maintenance of the vehicle easily. This thesis will introduce applied CAN protocol and design a control system of power windows based on CAN bus.KEYWORDS: CAN bus,automotive electronic,power windows名目摘要 (I)ABSTRACT (II)1绪论 (1)1.1 研究背景 (1)1.2 汽车车载网络技术概述 (2)1.3 电动车窗操纵技术的进展概况 (2)1.4 课题的要紧内容和意义 (3)1.4.1 课题的要紧内容 (3)1.4.2 课题的意义 (3)1.5 本章小结 (3)2 CAN总线 (5)2.1 CAN简介 (5)2.2 按照ISO/OSI参考模型CAN的分层结构 (6)2.3 CAN总线数值的特性 (6)2.4 CAN协议的报文帧结构形式 (7)2.4.1 数据帧 (7)2.4.2 遥控帧 (9)2.4.3 错误帧 (9)2.4.4 过载帧 (9)2.4.5 帧间隔 (9)2.5 报文接收和仲裁 (10)2.6 CAN的数据错误检测 (10)2.6.1 错误处理 (10)2.6.2 错误状态种类 (12)2.6.3 错误检测规则 (12)2.7 位时序 (13)2.8 本章小结 (14)3电动车窗的硬件设计 (15)3.1 主控节点的硬件设计 (15)3.1.1 微操纵器介绍 (15)3.1.2 CAN模块 (17)3.2 车窗节点的的设计 (23)3.3 本章小结 (27)4基于CAN的车窗操纵系统软件设计 (28)4.1 软件开发的环境 (28)4.2 CAN模块 (29)4.2.1 系统主程序 (29)4.2.2 系统的初始化 (29)4.2.3 CAN报文的发送 (30)4.2.4 CAN报文接收 (31)4.3 驱动模块 (32)4.4 本章小结 (33)5车窗防夹功能模拟测试与分析 (34)6总结与展望 (36)6.1 总结 (36)6.2 展望 (36)参考文献 (37)致谢................................................ 错误!未定义书签。
基于CAN总线的汽车智能关窗与锁车控制系统设计
0 引言
汽车已成为人们使用的常用交通工具,汽车控 制系统越来越智能化,朝着车载物联网的方向快速 发展[1]。而因为汽车控制系统的不完善,给人们的 生命与财产安全带来的危害也越来越多。如何改善 现有的车窗与锁车控制系统已经成为研究的热点, 各大车企也争相研发相关产品,然而目前智能控制 车窗与锁车系统应用并不完备[2,3]。现在电控车窗 系统已被广泛应用于各类汽车,而电控车窗在提供 方便的同时,也存在潜在的安全隐患。车窗一旦操 作不当,极容易对乘坐人员造成伤害,出于对乘坐人 员的安全考虑,特别是对乘坐儿童的考虑,研发例如 具有防夹功能的智能车窗势在必行。目前,电控车 窗主要有以下缺点:(1)雨天且车内无人时,不能关 闭车窗;(2)当车内有害气体超标时,无法开启车窗 降低对人体的危害;(3)当外力强行进入车内时,不 具备自动报 警、加 密 锁 车、信 息 发 送 的 功 能;(4)当 车内温湿度过高或过低时,不具备自动监测调节环 境的功能[4,5]。如何将价格低廉的单片机应用到智 能车窗与锁车系统,通过简单的改装就可以对汽车 控制系统升级显得格外重要。智能汽车控制系统的
摘要:针对现有汽车车窗与锁车系统不智能的缺陷,设计一种基于 CAN总线的汽车智能关窗 与锁车智能控制系统。该系统以单片机为控制核心,以 CAN总线为信号传输平台,实现了雨天且 车内无人时的自动关闭车窗功能,实现了车内有害气体超标时的自动开窗功能,实现了外力强行进 入车内时的自动报警和加密锁车功能,实现了当车内温湿度过高或过低时自动监测调节环境的功 能。通过实验测试,该系统实现了预定功能,达到了改善驾驶员的驾驶体验效果。
基于CAN总线的车身点焊监控系统设计
CS
VDD2
l VDD3 f
W R VSSl ALE V 2 SS VSS 3
趟
图2 智能节点电路图
[8 第3卷 71 3
第7 期
2 1- ( ) 0 1 7下
l
的相 关 器 件 中 已经 实 现 ,而 应 用 层 协 议 至 今 没 有
一
匐 似
胡德安 ,张 伟 , 陈益平
HU De a , - n ZHANG eiCHEN Yi ig W 。 — n p
( 南昌航空大学 航空制造工程学院 。 昌 3 0 6 ) 南 3 0 3 摘 要 : 介绍 了一种具有C N A 总线通 信功能的汽车 车身点焊控制 器。系统采用C N 场总 线作为通信 A现 传输方 式组建了监控 网络 ,设计 以A 8C 1 T 9 5单片机和C N 线控制器为核心 的通信模块 ,使 A总 点焊控 制器具有通信 功能。设计 了底层 电阻焊 网络控制器 的通信控制程序 ,通信 软件 和上层
线相 连 ,电阻 的限 流 作 用可 保护 8 C 5 2 20免受 过 流
的 冲 击 ,C _ 和 C N_ N A H A L与 地 之 间并 联 了 两 个
sJ 0 0 A1 0 ADO AD 1 AD TX0 TX1
1
— —
8 C2 0 2 5
2
2 GN 卜 t D
RXD c VRE Rs F VCC GND
5
A R D X ; 0
AD4 AD 5 LKo 7 U1
AD AD7 M ODE VDD 1
—
2 RX1
6. K 2
C=
4 K 7
4.K 7
基于CANopen现场总线的在线制绒清洗机控制系统

中 图分 类 号 : N3 5 T 0
文献标 识 码 : B
文章 编 号 :0 44 0 (0 0 .0 40 10 .5 72 1 )90 1 —5 1
The Co t o y t m ft n i x ur v c n r lS s e o he o lne Te t e De i e
( ( 总第 20 圈■圄皿 0 期)
■
电 字 工 业 毫 用 设 备
半导 体 制 造 工 艺 与 设 备
的 C 9 5工 控 机 配 1 61 9英 寸 触 摸 显 示 器 作 为 上 位
机 的管 理 操 作 平 台 ,施 耐 德 的 M2 8P C 为 主 控 5 L 制 器 , 同 时选 用 3台 施 耐 德 的 L X3 A 作 为 传 送 E 2
粒和 金属 离 子 污染 。见 图 1 示 。 所 在 线 制 绒 清 洗 机 控 制 系 统 采 用 B C HO F E K F
提 高光 电转 换 效 率 , 并进 行 表 面清 洗 , 除 表 面 颗 去
图 1 在 线 清 洗 机 示 意 图 收 稿 日期 :01 4 —3 2 1082
电机 的伺 服 驱 动 器 以及 6台施 耐 德 的 A3 2作 为 1 泵 的 变 频 调 速 器 , 采 用 F S O 的 2套 阀导 作 为 并 ET 阀 门的控 制器 ,整 个 控 制 系 统 共 有 1 个 从站 , 1 再 加 上 远 程 I 模 块 , 必 须 采 用 高速 通 讯 网络 来 实 / O 现 数 据 的 实 时 交 换 与 控 制 , 因 此 系 统 采 用 了
L XM3 A 总 线 型控 制 器 , 有 闭环 控 制 编 码 器 , 2 配 并
基于CAN总线的汽车电动车窗控制系统设计毕业论文

基于CAN总线的汽车电动车窗控制系统设计毕业论文目录摘要................................................ 错误!未定义书签。
ABSTRACT............................................ 错误!未定义书签。
1绪论.. (2)1.1 研究背景 (2)1.2 汽车车载网络技术概述 (3)1.3 电动车窗控制技术的发展概况 (4)1.4 课题的主要内容和意义 (5)1.4.1 课题的主要内容 (5)1.4.2 课题的意义 (5)1.5 本章小结 (5)2 CAN总线 (6)2.1 CAN简介 (6)2.2 按照ISO/OSI参考模型CAN的分层结构 (7)2.3 CAN总线数值的特性 (8)2.4 CAN协议的报文帧结构形式 (9)2.4.1 数据帧 (9)2.4.2 遥控帧 (10)2.4.3 错误帧 (11)2.4.4 过载帧 (11)2.4.5 帧间隔 (11)2.5 报文接收和仲裁 (12)2.6 CAN的数据错误检测 (12)2.6.1 错误处理 (12)2.6.2 错误状态种类 (14)2.6.3 错误检测规则 (14)2.7 位时序 (15)2.8 本章小结 (16)3电动车窗的硬件设计 (17)3.1 主控节点的硬件设计 (17)3.1.1 微控制器介绍 (17)3.1.2 CAN模块 (19)3.2 车窗节点的的设计 (25)3.3 本章小结 (29)4基于CAN的车窗控制系统软件设计 (30)4.1 软件开发的环境 (30)4.2 CAN模块 (31)4.2.1 系统主程序 (31)4.2.2 系统的初始化 (31)4.2.3 CAN报文的发送 (32)4.2.4 CAN报文接收 (33)4.3 驱动模块 (34)4.4 本章小结 (35)5车窗防夹功能模拟测试与分析 (36)6总结与展望 (38)6.1 总结 (38)6.2 展望 (38)参考文献 (39)致谢................................................ 错误!未定义书签。
基于CAN总线焊接车间环境实时监控系统的设计
2 系统硬 件 电路设 计
2 . 1 取样检测 电路
地检 测这些气体的存在 , 可 能会对工 作人员 身体 产生危 害 。 可燃气体 达到一定 的浓度还会产生爆炸 , 带来 的危害就相 当
大… 。所 以设 计一 种高效 准 确 的监控 系统 是 非常 必要 的。
气 体传 感 器 选 用 的 是 炜 盛 公 司 的 ME 3系 统 和 德 国 D r g e r 公 司生 产的 m i n i P a c系列定电位 电解 式传感器 , 传感器 电路 如图 2所示 。各检 测电路基 本一样 , 这里 只给出 了二氧 化硫 ( S O : ) 的取样检测 电路 , A D 6 2 3是一个集 成单 电源放大 器, 它 的增益可 以由外 接电路控 制。湿度 取样 检测电路是 由 湿敏 电容 H S 1 1 X X和 T L C 5 5 5组 成 J 。取样 检测 电路 得 到 的检测信 息分 别 送 到 L P C 2 1 1 9的 P o . 1 6、 P o . 2 0和 P o . 2 5 一 P o . 3 0八个 端 口作为采集信号输入端 。
P o . 0 一 P o . 7为 L C D显示数据 端 口, p 0 . 8 一 P o . 1 5为 L C D显 示 控制端 口。L C D 显 示 屏 用 深 圳 市 川 航 科 技 有 限 公 司 的 C H 2 4 0 1 2 8 C液晶模 块 ; P 0 . 2 3和 P o . 2 4为 C A N总 线数 据 端
L PC 2 1 1 9
3 系统 软件 设计
软件设计 是基于  ̄ C / O S 一 Ⅱ系 统设 计 的,  ̄ C / O S - Ⅱ是 一 个多任务 的操作系统 , 模块化设计可移植性强 。本系统 的设
基于CAN 总线技术的轿车车窗智能控制系统的方案设计

102AUTO TIMEAUTOMOBILE DESIGN | 汽车设计伴随着微型计算机控制器的汽车电子技术在车辆控制系统中应用,汽车控制技术正不断的从过去的电机控制系统转变为分布网络为基础的智能化系统。
汽车的智能化、数字网络化、节能化成了汽车发展的大方向。
汽车总线是实现数字网络化的基础,常用的汽车四大总线:CAN、LIN、Flexray、MOST 总线;其中CAN 总线是一种支持分布式和实时控制的串行通信网络,以其高性能和高可靠性在自动控制领域广泛应用。
1 控制系统分析1.1 功能及技术指标要求基于CAN 总线的轿车车窗智能控制的基本要求:设计一个主模块、一个分模块的硬件和软件,系统整体由1个主控模块3个分模块组成,利用CAN 总线的技术实行模块之间的网络通信传输,主控模块设在驾驶座,当司机泊车后主模块通过CAN 协议检测到车窗的状态,主模块再将关闭车窗的信号发送到各个节点的分模块,实现泊车后车窗关闭状态自检并自动关闭未关车窗。
车窗玻璃升降电机驱动限流设计的基本要求:设计一个驱动直流电动机正反转的电路,给单片机编译程序来控制电机过流反转,基于CAN 总线技术的轿车车窗智能控制系统的方案设计张军江阴职业技术学院 江苏省无锡市 214405摘 要: 在对关于CAN 总线在车辆电子控制系统中的实践运用和电动自动升降车窗防夹功能的研究基础上,探索出一种基于CAN 总线控制技术的汽车车窗智能控制系统的设计方案,实现车窗在工作正常状态下的防夹控制功能和泊车后车窗关闭状态自检并自动关闭未关车窗。
关键词:CAN 总线;防夹;智能控制;优化方案实现车窗防夹功能。
1.2 设计内容按设计技术指标进行车窗防夹、泊车后车窗关闭状态自检并自动关闭未关车窗的设计的思路。
1.3 设计思路及关键技术主模块:基于CAN 总线技术的轿车车窗智能控制系统通过CAN 协议将车窗控制的4个模块作为4个节点挂在CAN 总线上形成一个网络,通过这个网络确保模块之间顺利的沟通,该设计的硬件有CAN 控制器SJA10001块、CAN 总线的收发器CM1050T1快、单片机STC12C5A16AD1快、12M 晶振1快、16M 晶振1块、30pf 电容2个,22pf 电容2个、1k 电阻若干等组成。
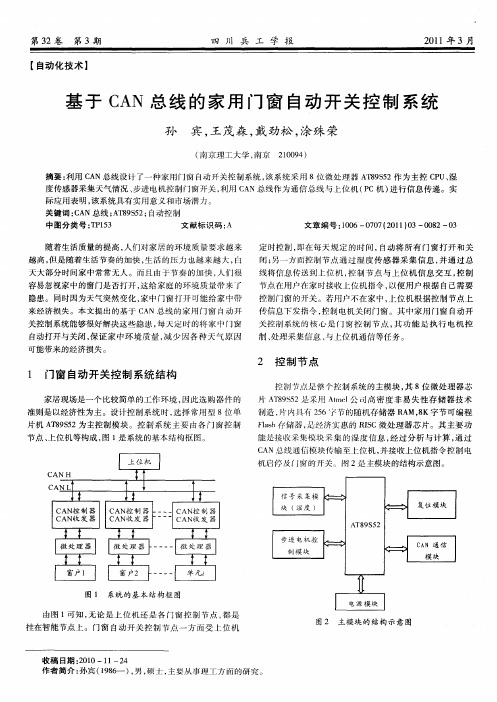
基于CAN总线的家用门窗自动开关控制系统
线将信息传送到上位机 , 制节点 与上 位机信 息交互 , 制 控 控
节 点 在 用 户 在 家 时接 收上 位机 指令 , 以便 用 户 根 据 自 己需 要
容易忽视家 中的窗门是否打开 , 这给家庭 的环境质量带来 丁 隐患 。同时 因为天气突然变化 , 中门窗打开可能给 家中带 家
来 经 济 损 失 。本 文 提 出 的 基 于 C N 总 线 的 家 用 门 窗 自动 开 A
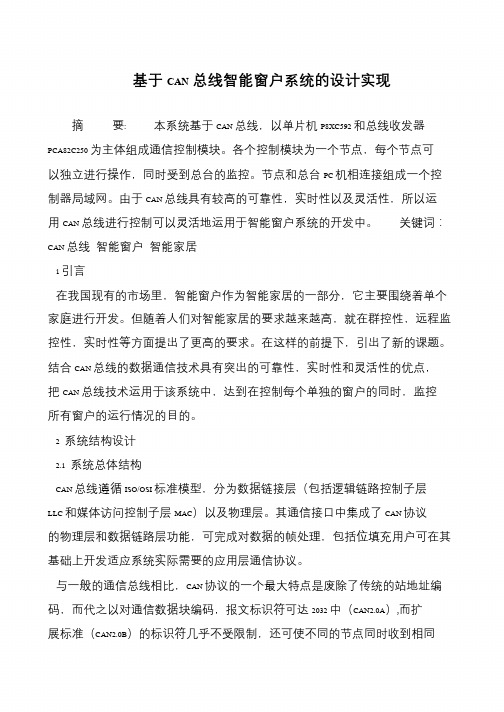
片 A S 2足采片 te 公 高密度 非易 失性存 储器 技术 q95 8 J ml A 制造 , 内具仃 26 节的随机存储器 R M,K字节可编程 片 5 A 8
Fah仔 储 器 , 经 济 实 惠 的 R S l s 足 IC微 处 理 器 芯 片 。其 主 要 功
节点 、 上位机等构成 , 1 系统 的基本结构框 图。 图 是
A 8 S 2的 P . 相 连 , P 片 外 存 储 器 地 址 可 选 中 T 95 20 CU
S A1 0 C U J 0 0. P
通 过 这 些 地 址 可 对 SA 0 0执 行 相 应 的 读/ 操 作 。 J 10 写 SA 一0 一 R 7— 一A E — 与 微 处 理 器 A 8 S2 的 J 1 4一 一D、 加一 一 H 00的 — WR、¨一 分 别 L T95 一 0—
度传感器采集天气情 况 、 步进 电机控制 门窗开关 , 利用 C N总线作 为通 信总线 与上位机 ( c机) A P 进行 信息传递 。实
际应用表明 , 系统具有实用意义和市场潜力。 该 关 键 词 :A 总线 ; T 9 5 ; CN A 8 S 2 自动 控 制
一种基于CAN总线的汽车车窗多功能控制系统[实用新型专利]
![一种基于CAN总线的汽车车窗多功能控制系统[实用新型专利]](https://img.taocdn.com/s3/m/2c65cbc1915f804d2a16c194.png)
专利名称:一种基于CAN总线的汽车车窗多功能控制系统专利类型:实用新型专利
发明人:朱艳萍,陈轶林,张艳艳,史振宇,苗善华
申请号:CN201520300770.8
申请日:20150512
公开号:CN204715998U
公开日:
20151021
专利内容由知识产权出版社提供
摘要:本实用新型涉及一种基于CAN总线的汽车车窗多功能控制系统,在电动车窗防夹方面设计采用了一种基于PIC系列单片机的电子控制单元,通过该控制单元实现电动车窗的防夹以及剧烈振动情况下的自动关闭;一键总控控制单元、发动机开关控制单元和语音控制单元则通过CAN总线通信网络实现与车窗控制单元之间的信息交换,从而实现一键控制汽车车窗关闭及发动机开关关闭时的车窗自动关闭以及语音控制车窗升降。
该系统通过汽车电动车窗多功能的智能控制,可以确保紧急情况下车内人身的安全,而基于CAN总线技术又可大大简化了汽车内部布线的复杂程度,加快智能控制的速度。
申请人:南京信息工程大学
地址:210044 江苏省南京市宁六路219号
国籍:CN
代理机构:江苏爱信律师事务所
代理人:唐小红
更多信息请下载全文后查看。
基于can总线的汽车车窗控制算法

基于can总线的汽车车窗控制算法近年来随着汽车产业的快速发展,越来越多的车辆装配了CAN总线,将CAN总线应用于汽车车窗控制系统成为了一个热门领域。
本文旨在介绍基于CAN总线的汽车车窗控制算法,为读者详细阐述汽车车窗控制系统的工作原理和算法实现过程。
第一步,确定控制架构在开始实现汽车车窗控制系统之前,我们需要确定车窗控制器的控制架构。
通常情况下,汽车车窗控制系统由车窗控制器、窗户电机和气压开关组成。
控制器的角色是根据车内或者遥控器的指示指示将窗户升起或降下,并根据车窗行程位置对电机施加电压以实现窗户开启或关闭。
第二步,实现车窗控制器在基于CAN总线设计的汽车车窗控制系统中,最复杂的部分就是实现车窗控制器。
正常情况下,这个控制器将附在车辆总线上并监听数据流,以识别指令并控制窗户。
具体来说,控制器将接收指令并将其口令解码。
一旦指令被成功解码,控制器就会跟踪指令发送者,并将请求操作发送给与窗户控制器相连的信号。
车窗控制器还应具有类似于位置反馈的功能,以识别窗户的确切位置并防止反弹。
第三步,开发程序在控制器被实现并测试之后,下一步是开发程序,以使控制器能够根据指令来启动和停止电机。
车窗控制器的程序通常由缩小C和汇编编写,并优化以保证系统的稳定性和性能。
第四步,实现气压开关开发车窗控制器之后,接下来的一步是实现气压开关。
气压开关是一种机械式开关,其根据气压变化关闭或打开。
智能化车窗控制器应该可以对窗户的位置进行监控,当窗户处于打开或关闭的边缘位置时,气压开关将能够识别到并停止窗户关闭或打开的动作。
总结基于CAN总线的汽车车窗控制算法可以大大提高汽车生产线的效率,这是目前越来越多汽车厂商开始采用CAN总线技术的原因之一。
本文详细介绍了汽车车窗控制系统的设计和实现过程,包括控制架构、车窗控制器的实现、开发程序以及如何实现气压开关。
通过这些步骤来实现一个成功的汽车车窗控制系统,能够为汽车行业提供更加完美的解决方案。
基于CAN总线智能窗户系统的设计实现
基于CAN总线智能窗户系统的设计实现
摘要: 本系统基于CAN 总线,以单片机P8XC592 和总线收发器PCA82C250 为主体组成通信控制模块。
各个控制模块为一个节点,每个节点可以独立进行操作,同时受到总台的监控。
节点和总台PC 机相连接组成一个控制器局域网。
由于CAN 总线具有较高的可靠性,实时性以及灵活性,所以运
用CAN 总线进行控制可以灵活地运用于智能窗户系统的开发中。
关键词:CAN 总线智能窗户智能家居
1 引言
在我国现有的市场里,智能窗户作为智能家居的一部分,它主要围绕着单个家庭进行开发。
但随着人们对智能家居的要求越来越高,就在群控性,远程监控性,实时性等方面提出了更高的要求。
在这样的前提下,引出了新的课题。
结合CAN 总线的数据通信技术具有突出的可靠性,实时性和灵活性的优点,
把CAN 总线技术运用于该系统中,达到在控制每个单独的窗户的同时,监控
所有窗户的运行情况的目的。
2 系统结构设计
2.1 系统总体结构
CAN 总线遵循ISO/OSI 标准模型,分为数据链接层(包括逻辑链路控制子层LLC 和媒体访问控制子层MAC)以及物理层。
其通信接口中集成了CAN 协议的物理层和数据链路层功能,可完成对数据的帧处理,包括位填充用户可在其基础上开发适应系统实际需要的应用层通信协议。
与一般的通信总线相比,CAN 协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块编码,报文标识符可达2032 中(CAN2.0A),而扩展标准(CAN2.0B)的标识符几乎不受限制,还可使不同的节点同时收到相同。
基于CANopen现场总线的在线制绒清洗机控制系统

基于CANopen现场总线的在线制绒清洗机控制系统王达;胡彩丰;李建国;高丽颖【期刊名称】《电子工业专用设备》【年(卷),期】2011(040)009【摘要】This paper introduces the hardware configuration based on M258 and CANopen,network and mainly control function of the online Texture device,include synchronously convey of work pieces and so on.%根据在线制绒清洗机的工艺要求及特点,对采用了M258及CANopen现场总线控制系统的构成及网络控制结构进行了详细的研究,并结合底层的执行器及传感器实现了包括硅片的同步传输等主要控制功能。
【总页数】5页(P14-17,24)【作者】王达;胡彩丰;李建国;高丽颖【作者单位】北京七星华创电子股份有限公司,北京100015;北京七星华创电子股份有限公司,北京100015;北京七星华创电子股份有限公司,北京100015;北京七星华创电子股份有限公司,北京100015【正文语种】中文【中图分类】TN305【相关文献】1.基于CANopen现场总线的熔喷无纺布生产线控制系统 [J], 徐华良2.制绒清洗机上下料台的设计 [J], 宋秀云3.基于CANopen现场总线的分布式控制及应用 [J], 苏国火;宋永伦;赵双喜4.在线式多晶制绒清洗设备软件控制系统设计与实现 [J], 高丽颖;胡彩丰;王达;李建国;杨浩;王青松;曹志刚;李凡5.基于Profibus现场总线的加料机在线优化控制系统 [J], 徐瑾;王玉梅因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于CAN总线的塑窗焊接清理生产线控制系统
1 前 言 随着计算机技术、通信技术、网络技术在工业生产、过程控制中的不断推广应用 ,工业控制过程对现场信号的传输和数据交换的要求也越来越高 ,由于全数字信号系统较之传统模拟信号具有抗干扰性强、速率高、建设周期短等特点 ,数字化的现场总线迅速成为当前工业控制领域的一个焦点。目前 ,市场上有多种现场总线技术如 HART、PROFIBUS、 FF 等 ,其中 CAN (Controller Area Network)现场总线是德国BOSCH公司推出的一种现协议的制定包含优先级 ,状态变动和控制权移交等关键技术。本文介绍了一种基于 CAN 总线的生产线控制系统 ,具体阐述了奥地利贝加莱公司的自控产品通过 CAN 网络在塑料门窗焊接清理生产线的实际应用及特点。
4 系统特点 (1)生产线主站为工控机,人机面板,两个PCC可编集成度。 (2)主站之间采用贝加莱公司通用 CAN网络PVI传输协议 ,在软件中设定不同通信站点 ,方便系统之间的相互连接 ,组网简单明了。 (3)系列产品作为从站时 ,仅需设定拨码开关为从站地址 ,与主站采用专用的 CAN 通信函数 ,具有可靠、高速、简单的优点。 (4)与其它产品进行 CAN 网络通信时 ,可按照对方提供的 CAN网络通信协议 ,采用贝加莱特有的自由通信软件包( FRAME DRIVER) ,依据通信对象、数据格式、传输速率 ,编制对方协议 ,实现相互连接 ,数据双向交换的目的。 (5) 控制器 PCC 与伺服 ,变频驱动器采用CAN总线连接 ,节省了以往需要的大量信号线。同时 ,控制器可以节省许多的编码器信号采集模块及输出控制模块。 (6)由于采用全数字 CAN 网络技术 ,数据传输安全准确 ,避免了模拟信号给定精度低 ,容易受到外界环境干扰的缺点。
2 CAN总线的基本特性2. 1 现代工业系统的特点 (1)系统的开放性。开放系统是指通信协议公开 ,各不同厂家的设备之间可互连为系统并可实现信息交换。这里的开放是指相关标准的一致性、公开性 ,强调对标准的共识与遵从。开放系统把系统集成的权利交给了用户。用户可按自己的需要和考虑 ,把来自不同供应商的产品组成大小随意的系统。 (2)可互操作性与互用性。指实现互连设备间的信息传送与沟通以及对不同生产厂家的性能类似的设备可实现相互替换。 (3)现场设备的智能化与功能自治性。它将传感测量、补偿计算、工程量处理与控制等功能分散到现场设备中去完成 ,因此 ,仅靠现场设备即可完成自动控制的基本功能 ,并可随时诊断设备的运行状态。 (4)系统结构的高度分散性。构成一种新的全分散型控制系统的体系结构。从根本上改变了现有集散控制系统体系 ,简化了系统结构 ,提高了可靠性。 (5)对现场环境的适应性。系统具有较强的纠错能力 ,并可满足安全防爆要求。2. 2 现场总线的优越性 (1)节省硬件数量与投资。 (2)节省安装费用。 (3)节省维护费用。 (4)用户拥有高度的系统集成主动权。 (5)提高了系统的准确性与可靠性。 (6)设计简单 ,易于重构。2. 3 CAN总线技术特性 从物理结构上看 ,CAN 属于总线式通讯网络 ,与BITBUS ,RS485 相似 ,又有本质区别。它是一种专门用于工业自动化领域的网络 ,不同于以太网等管理和信息处理用网络。其物理特性及网络协议特性更强调工业自动化的底层监测及控制。它采用了最新的技术及独特的设计 ,其可靠性和性能超过了已陈旧的现场通讯技术 ,如RS485 ,BITBUS等。CAN具有下列主要特性: (1) CAN插卡可任意插在 PC ,XT ,AT兼容机上 ,方便地构成分布式监控系统。 (2) CAN可以多主方式工作 ,网络上任意一个节点均可在任意时刻主动地向网络其它节点发送信息 ,而不分主从 ,通讯方式灵活。利用这一特点也可以方便地构成(容错)多机备份系统。 (3) CAN无破坏性地基于优先权的仲裁 ,可满足不同的实时要求 ,有效避免了总线冲突。 (4) CAN可以点对点 ,一点对多点(成组)及全局广播等几种方式传送和接收数据。 (5) CAN采用短帧结构 ,每一帧有效字节为 8个 ,这样传输时间短 ,受干扰概率低 ,重新发送时间短。 (6) CAN每帧信息都有 CRC校验及其它检错措施 ,保证了数据的出错率极低。 (7)暂时错误和永久性故障的故障节点的判别以及故障节点的自动脱离。 (8)NRZ编码/解码方式 ,并采用位填充(插入)技术。 (9)通讯介质采用双绞线 ,无特殊要求。
3 塑窗生产线控制系统的设计和原理(图1)
3.1 控制系统的设计 塑窗生产线的要求为数控三轴焊接机 ,冷却中心 ,数控四轴清角清缝机联成一体 ,加工数据及工作情况信息共享 ,根据工厂的要求 ,焊接机和清理机即可同时工作 ,实现流水线生产 ,又可设定单独工作。为此 ,焊接机和清理机各设一台人机界面 ,实时监测设备运行情况。实际生产计划根据生产调度人员的安排 ,利用专用数据处理软件包 ,生成指令软盘来管理设备运行 ,运行人员每班仅需将软盘插入计算机软驱内 ,便可按照软盘的加工参数 ,实现自动加工。 ,生产线控制系统采用贝加莱公司的整套自控系统设备来实现 CAN 现场总线数据处 理 , 焊 接 机 采 用 工 业 控 制 用 计 算 机PROVIT2000作为监测设备 ,在清理机设置一台人机面板 PANELWARE ,焊接机控制器为 PCC1 ,清理机控制器为 PCC2。在 CAN 网络上 ,主站为工控机 ,可编程控制器 PCC和人机面板 PANELWARE ,通过 CAN网络实现主站之间的数据通信。从站为传动装置 ,伺服驱动器(用于伺服电机定位)和变频驱动器(用于交流电机调速) ,从站取不同的站号 ,依次设为1 ,2 ,3 (3轴伺服驱动用于焊接) ,4(变频实现机械手运动) ,5 ,6 ,7 ,8 (4 轴伺服驱动用于清理) 。3.2 控制原理3. 2. 1 焊接机控制原理 焊接机控制原理为:工控机读取软盘信息 ,通过 CAN总线传递到可编程计算机控制器 PCC1中 ,操作人员按照预先切割好的 PVC 型材 ,放置到加工位置 ,PCC1 根据加工参数 ,使用贝加莱的专用 NCACTION 函数 ,通过 CAN 网络传输数据 ,控制指定的从站伺服驱动器 ,直线定位运动 ,配合其它 IO端口输出 ,从而达到加热焊接的要求 ,同时通过NET2CAN函数 ,读取清理机 PCC2 的状态信息 ,如果正常 ,便通过传送带将焊接好的窗框传送到冷却中心;如果异常 ,便暂停传送 ,以免堆料。窗框在冷却中心冷却 ,然后由机械手传输到清理机实现清角焊缝。3. 2. 2 清理机控制原理 清理机控制原理为: PCC2 根据与 PCC1 之间进行的 NET2CAN 数据交换 ,得到焊接的型材序号 ,通过 CAN网络在人机面板上实现实时工况显示 ,通过贝加莱 FRAME DRIVER 帧通信软件包 ,仿真伦次变频电机的 CAN通信协议 ,控制电机实现机械手的往复运动 ,将冷却中心焊接冷却后的窗框用机械手拉到加工指定区间 ,随后推料器将窗框推到三角加工区内; PCC2 根据加工参数 ,使用NCACTION 函数 ,通过 CAN 网络 ,控制指定的四台从站伺服驱动器联动 ,根据直线或园弧插补要求 ,实现 CNC曲线的定位 ,结合其它工件动作 ,达到清内角 ,外角 ,缝隙的目的 ,同时将当前状态通过NET2000 CAN—Write 函数写到焊接机控制器PCC1里 ,保证加工状态的信息共享。