motorola协议解析
motorola和inter报文dbc解析 -回复

motorola和inter报文dbc解析-回复在汽车领域,通信协议起着关键作用,它们使得车辆内部各个模块能够相互通信和协调工作。
而DBC(Diagnostics Communication Protocol)是一种流行的协议,用于定义和解析车辆之间的通信信息。
本文将以"motorola和inter报文DBC解析"为主题,一步一步详细介绍这两种协议以及其在汽车通信领域中的应用。
首先,让我们来了解一下Motorola CAN(Controller Area Network)协议。
CAN是一种高性能的车载总线通信协议,由Motorola公司在1983年推出。
CAN协议支持多个节点在同一个总线上进行通信,其主要特点是高可靠性和实时性。
而Motorola CAN协议的特殊之处在于其使用了Motorola格式的数据帧结构。
Motorola格式的数据帧由ID字段和Data 字段组成,其中ID字段用于标识消息的优先级和内容,而Data字段则用于携带实际的数据。
通过解析Motorola格式的数据帧,可以获取发送节点的信息以及传输的具体数据。
与之类似,INTER(International Electronics and Engineering Company)也是一种通信协议,用于定义和解析车辆之间的通信信息。
INTER协议通常与CAN协议结合使用,以实现车辆内部各个模块的通信和协调。
INTER协议的消息是以DBC(Diagnostics Booting Configuration)文件的形式进行定义和存储的。
DBC文件是一个文本文件,其中包含了INTER协议的数据结构和通信信息。
通过解析DBC文件,可以获取到各个节点之间的通信消息、数据格式以及相应的信号定义等信息。
现在,让我们来介绍一下如何进行Motorola和Inter报文的DBC解析。
首先,我们需要使用相应的工具和软件来读取DBC文件,并将其转换为易于理解和操作的格式。
motorola和inter报文dbc解析
motorola和inter报文dbc解析摘要:1.Motorola 和Intel 报文DBC 解析概述2.Motorola 报文DBC 解析3.Intel 报文DBC 解析4.解析DBC 报文的工具和方法5.DBC 报文解析在实际场景中的应用正文:一、Motorola 和Intel 报文DBC 解析概述在通信领域,Motorola 和Intel 都是重要的通信设备制造商。
他们的设备在传输数据时,会使用一种名为“报文数据库(DBC)”的协议来解析和处理数据。
报文数据库包含了设备间通信所需的所有信息,如数据格式、校验和、控制字段等。
解析DBC 报文可以帮助我们更好地理解设备间的通信过程,从而优化通信效率和解决通信问题。
二、Motorola 报文DBC 解析Motorola 的DBC 报文解析主要依赖于其特有的报文格式和解析规则。
Motorola 的DBC 报文通常包含以下几个部分:1.报文头:包括报文类型、报文长度和校验和等信息。
2.控制字段:包括数据传输方向、数据传输速率和数据传输协议等控制信息。
3.数据字段:包含了实际传输的数据。
4.校验和字段:用于检测数据传输过程中的错误。
三、Intel 报文DBC 解析与Motorola 类似,Intel 的DBC 报文也包含报文头、控制字段、数据字段和校验和字段。
不同之处在于,Intel 的DBC 报文有一些特定的报文格式和解析规则,例如,Intel 的报文头中可能包含更多的控制信息,以满足其特定的通信需求。
四、解析DBC 报文的工具和方法解析DBC 报文通常需要使用一些专业的解析工具,如Wireshark、tcpdump 等。
这些工具可以捕获网络数据包,并将其转换为易于理解的格式。
此外,也有一些编程语言库,如Python 的socket 库,可以用来解析DBC 报文。
五、DBC 报文解析在实际场景中的应用DBC 报文解析在通信设备调试、网络优化和故障排查等场景中都有广泛的应用。
motorola报文解析

motorola报文解析Motorola报文解析是指对Motorola通信协议中的报文进行解析和处理的过程。
Motorola通信协议是Motorola公司开发的一种用于数据传输的通信协议,常用于无线电通信和移动通信领域。
在Motorola报文解析过程中,首先需要了解Motorola通信协议的格式和规范。
Motorola报文通常由多个字段组成,每个字段都有特定的含义和格式。
根据Motorola通信协议的规定,可以通过解析每个字段来获取报文中的信息。
在解析Motorola报文时,首先需要根据Motorola通信协议的规定,确定报文的起始和结束位置。
通常情况下,Motorola报文以特定的起始标记开始,以特定的结束标记结束。
通过定位起始标记和结束标记,可以将报文从原始数据中提取出来。
接下来,需要按照Motorola通信协议的规定,逐个解析报文中的字段。
每个字段都有特定的长度和格式,可以根据规定的格式将字段从报文中提取出来,并进行解析。
解析过程中需要注意字段的顺序和含义,确保正确地解析出报文中的每个字段的值。
解析出报文中的字段值后,可以根据需要进行进一步处理。
根据Motorola通信协议的要求,可能需要对字段值进行转换、计算或存储等操作。
这些操作可以根据具体的需求进行,以满足实际应用的要求。
Motorola报文解析的过程中需要注意一些常见的问题。
首先是报文的完整性和正确性,需要确保报文的起始和结束标记正确,并且报文中的字段按照规定的格式进行编码。
其次是字段的解析和处理,需要根据Motorola通信协议的规定进行解析,并确保解析出的字段值正确和准确。
最后是异常情况的处理,如果在解析过程中遇到错误或异常情况,需要进行相应的处理和错误处理。
Motorola报文解析在无线电通信和移动通信等领域有着广泛的应用。
通过解析Motorola报文,可以获取到报文中的各种信息,包括设备状态、信号强度、位置信息等。
这些信息对于无线电通信和移动通信系统的运行和管理非常重要,可以用于监控和调试系统的运行情况,优化系统性能,提供用户定位和导航等服务。
mllp 协议详解

mllp 协议详解(原创实用版)目录1.概述2.mllp 协议的基本概念3.mllp 协议的组成部分4.mllp 协议的工作原理5.mllp 协议的应用领域6.结论正文1.概述mllp(Motorola Logistical Language Protocol)协议是一种用于物流行业的通信协议,旨在实现各种物流信息系统之间的数据交换和信息共享。
mllp 协议起源于 20 世纪 80 年代,由美国 Motorola 公司开发,后来得到了广泛的应用和推广。
2.mllp 协议的基本概念mllp 协议是一种基于 ASCII 码的串行通信协议,它采用主从式通信模式,通常由一个主设备(如计算机)和一个或多个从设备(如条码扫描器、打印机等)组成。
主设备负责发起通信和控制数据传输,从设备则根据主设备的指令进行响应。
3.mllp 协议的组成部分mllp 协议主要包括以下几个部分:(1) 协议头:mllp 协议的头部包含了起始符、协议版本、长度等基本信息,用于标识数据包的开始和结束。
(2) 应用数据单元(APDU):APDU 是 mllp 协议的核心部分,它包含了实际要传输的数据。
APDU 由数据标识符、数据长度和数据内容组成。
(3) 控制字符:mllp 协议使用特定的控制字符来实现通信控制,如换行符、回车符、换页符等。
(4) 校验和:mllp 协议使用校验和来检验数据传输的正确性。
校验和是根据 APDU 内容计算得出的,接收方会根据相同的算法对收到的数据进行校验。
4.mllp 协议的工作原理mllp 协议的工作原理可以概括为以下几个步骤:(1) 主设备发起通信,发送协议头和 APDU。
(2) 从设备接收数据,并根据协议头中的信息解析 APDU。
(3) 从设备根据解析后的 APDU 执行相应的操作,如需要打印、存储等。
(4) 从设备发送响应 APDU,包含执行操作后的结果。
(5) 主设备接收响应 APDU,并根据需要进行后续处理。
motorola协议格式

motorola协议格式Motorola协议是一种通信协议,最初由美国Motorola公司开发,用于在计算机系统之间进行数据传输。
它采用二进制格式表示数据,并定义了数据帧的结构和通信规则。
Motorola协议被广泛应用于许多领域,例如无线通信、嵌入式系统和自动化控制等。
一、Motorola协议的基本结构Motorola协议使用帧结构来传输数据,每个帧包含起始标志、数据域、校验和等字段。
以下是一个典型的Motorola协议帧的结构:1. 起始标志:Motorola协议帧以一个特定的起始标志开始,通常为字节0x55。
这个起始标志用于同步接收端和发送端的时钟,以确保数据传输的准确性。
2. 数据域:数据域是Motorola协议帧中包含实际数据的部分。
数据可以是数字、字符或其他任意类型的信息。
数据域的长度可以根据需求进行调整。
3. 校验和:Motorola协议使用一种校验算法来保证数据传输的完整性和正确性。
校验和字段存储了对数据域进行校验后得到的校验值,接收端可以通过重新计算校验和来验证数据的正确性。
4. 结束标志:Motorola协议帧以一个特定的结束标志结束,通常为字节0xAA。
这个结束标志用于表示帧的结束,并且也用于同步接收端和发送端的时钟。
二、Motorola协议的通信规则Motorola协议定义了数据传输的一些基本规则,以确保数据的高效和可靠传输。
以下是一些常见的通信规则:1. 发送方/接收方角色:在Motorola协议中,设备可以同时充当发送方和接收方。
发送方将数据封装成帧并发送到接收方,接收方解析帧并处理数据。
2. 数据流控制:Motorola协议可以通过软件或硬件实现数据流控制。
发送方和接收方可以使用协议中定义的特定信号进行数据传输控制,以避免数据丢失或传输过程中的堵塞。
3. 重传机制:Motorola协议支持数据的重传机制,以确保数据的可靠性和完整性。
如果接收方检测到数据错误或丢失,它可以向发送方发送请求重新发送数据的命令。
motorola和inter报文dbc解析

motorola和inter报文dbc解析摘要:一、motorola和inter报文dbc解析简介二、motorola报文dbc解析方法1.文件结构分析2.数据字段解析3.报文示例解析三、inter报文dbc解析方法1.文件结构分析2.数据字段解析3.报文示例解析四、motorola和inter报文dbc对比与总结正文:一、motorola和inter报文dbc解析简介在通信领域,motorola和inter报文dbc解析技术被广泛应用。
本文将详细介绍motorola和inter报文的dbc解析方法,以帮助读者更好地理解和应用这些技术。
二、motorola报文dbc解析方法1.文件结构分析Motorola报文的dbc文件通常包含以下几个部分:- 头文件:包含数据库的基本信息,如版本、创建时间等。
- 数据表:包含报文中的所有数据字段及其属性。
- 报文类型:定义报文的类型、长度、编码方式等。
- 报文定义:包含各个报文的发送方、接收方、周期等信息。
2.数据字段解析在motorola报文的dbc文件中,数据字段分为以下几类:- 必需字段:报文必需的字段,如帧头、帧尾等。
- 公共字段:多个报文共用的字段,如设备类型、设备地址等。
- 私有字段:特定设备或通信协议独有的字段。
3.报文示例解析以下是一个motorola报文的示例:```0x7E 0x01 0x02 0x11 0x03 0x04 0x05 0x06 0x07 0x08 0x09 0x0A 0x0B 0x0C 0x0D 0x0E 0x0F 0x10```该报文以0x7E为帧头,0x11为设备类型,0x02为设备地址。
接下来的字段分别为:0x03(数据1)、0x04(数据2)、0x05(数据3)等。
三、inter报文dbc解析方法1.文件结构分析Inter报文的dbc文件结构与motorola类似,包含头文件、数据表、报文类型、报文定义等部分。
2.数据字段解析Inter报文的dbc文件中,数据字段分为以下几类:- 必需字段:报文必需的字段,如帧头、帧尾等。
zcanpro中can数据发送的摩托罗拉协议的起始位

zcanpro中can数据发送的摩托罗拉协议的起始位标题:深度探讨zcanpro中can数据发送的摩托罗拉协议的起始位摩托罗拉协议,作为一种常用的通信协议,被广泛应用在各种数据传输场景中。
在zcanpro中,can数据发送时采用的摩托罗拉协议的起始位,是整个数据传输过程中的关键环节。
本文将深度探讨这一主题,并对其进行全面评估,以期帮助读者更深入地理解和应用该协议。
一、摩托罗拉协议的起始位介绍在zcanpro中,can数据发送时采用的摩托罗拉协议是一种最常用的数据传输协议之一。
该协议的起始位,即数据传输的初始标识符,通常由一系列特定的比特组成,用来表示数据包的开始。
在摩托罗拉协议中,起始位的格式和含义对于数据的正确解析和传输至关重要。
我们需要深入了解起始位的结构和作用,以便更好地理解和应用这一协议。
摩托罗拉协议的起始位通常由一系列连续的逻辑1和逻辑0组成,用以标识数据包的开始。
在协议中,起始位的格式和长度可能根据不同的数据传输需求而有所不同,因此我们需要对特定应用场景下的起始位进行详细的分析和解读。
二、摩托罗拉协议的起始位在zcanpro中的应用在zcanpro中,摩托罗拉协议的起始位被广泛应用于can数据的发送和接收过程中。
起始位的正确设置和解析对于保障数据传输的准确性和稳定性至关重要。
在实际应用中,我们需要根据不同的数据传输要求,对摩托罗拉协议的起始位进行灵活的设置和解析,以达到最佳的数据传输效果。
针对zcanpro中摩托罗拉协议起始位的具体应用场景,我们需要对其进行深入的思考和分析。
从数据的发送、接收到解析,以及对实际应用中可能遇到的各种问题和挑战进行全面评估,以便更好地应对实际工程项目中的需求和挑战。
三、我对摩托罗拉协议起始位的个人观点和理解作为一种重要的数据传输协议,摩托罗拉协议的起始位在zcanpro中的应用具有重要的意义。
在我看来,摩托罗拉协议的起始位不仅仅是一串数据,更是数据传输过程中的关键标识,它直接影响着数据的准确性和高效性。
can解析库摩托罗拉格式

can解析库摩托罗拉格式【标题】摩托罗拉格式解析:全方位了解这一摩托罗拉技术的指导意义【导言】摩托罗拉格式的解析一直以来都备受关注。
作为一种技术标准,摩托罗拉格式在电子设备中扮演了重要角色。
本文将从内容生动、全面、有指导意义三个方面,深入解析摩托罗拉格式的相关特性与应用领域,为读者带来全新的认识。
【内容正文】一、摩托罗拉格式的背景和概述摩托罗拉格式(Motorola format)是一种二进制数据的存储和传输格式,最早由美国摩托罗拉公司在上世纪60年代开发。
它以其简洁、高效、通用的特性而广泛应用于电信、无线通信、计算机等领域。
摩托罗拉格式以其独特的数据结构和编码规则,成为了数据交换和设备通信的重要工具。
二、摩托罗拉格式的主要特点和应用1. 数据结构:摩托罗拉格式采用的大端序表示法,使得数据在存储和传输过程中具备高度的可靠性和兼容性。
2. 数据编码:摩托罗拉格式以字节为单位进行数据编码,能够准确、高效地传输数据信息。
3. 基于摩托罗拉格式的应用:摩托罗拉格式在各个行业都有广泛应用,包括但不限于电信通信、汽车电子、工业自动化、航天航空等领域。
它在数据交换、设备通信、软件开发等方面发挥着重要作用。
三、摩托罗拉格式解析的指导意义1. 提升技术应用水平:通过深入解析摩托罗拉格式的特性和应用,可以帮助技术人员更好地理解和应用该格式,从而提升相关技术领域的应用水平。
2. 数据传输和设备通信的优化:了解摩托罗拉格式的数据结构和编码规则,能够优化数据传输和设备通信过程,提高数据的准确性和传输效率。
3. 促进行业发展:深入研究摩托罗拉格式的应用领域,能够为各个行业提供更多的技术支持和解决方案,推动行业的快速发展。
【结语】本文以生动、全面、有指导意义的方式解析了摩托罗拉格式。
读者通过深入了解摩托罗拉格式的相关特点和应用领域,可以在技术应用、数据传输和设备通信等方面获得更多的启示与提升。
随着科技的不断进步,摩托罗拉格式将继续为各行各业的发展提供强大的支持。
motorola和inter报文dbc解析

motorola和inter报文dbc解析1.引言在汽车电子领域,通信协议是各个控制器之间进行数据交换的重要方式之一。
而D BC(D at a Ba se Co nt ai ne r)文件是一种常见的描述车辆通信协议的文件格式。
本文将介绍M ot or ol a和I nt el两种常见的报文D B C解析方式,帮助读者更好地理解和应用这两种解析方法。
2. Mo torola报文D B C解析M o to ro la格式是一种常用的嵌入式系统中使用的网络报文格式。
该格式以位为基本单位,将数据以字节为单位进行编码和传输。
以下是M o to ro la报文DB C解析的基本过程:解析报文头1.:解析D BC文件的文件头部分,获取报文的基本信息,如报文版本号、创建者信息等。
解析节点2.:根据DB C文件定义的节点信息,解析出各个参与通信的节点的属性,例如节点名称、节点ID等。
解析消息 3.:根据D B C文件定义的消息信息,解析出所有的消息结构,包括消息ID、名称、发送周期等。
解析信号4.:针对每个消息,解析出其中包含的信号信息,包括信号名称、起始位、长度、数据类型等。
解析信号值5.:对于每个信号,根据D BC文件定义的物理值表,解析出对应的物理值和工程值,方便后续的数据处理和分析。
3. In tel报文D B C解析I n te l格式是一种常见的计算机领域中使用的网络报文格式。
该格式以字节为基本单位,采用Li tt le-E nd ian字节顺序进行编码和传输。
以下是In te l报文D BC解析的基本过程:解析报文头1.:解析D BC文件的文件头部分,获取报文的基本信息,如报文版本号、创建者信息等。
解析节点2.:根据DB C文件定义的节点信息,解析出各个参与通信的节点的属性,例如节点名称、节点ID等。
解析消息 3.:根据D B C文件定义的消息信息,解析出所有的消息结构,包括消息ID、名称、发送周期等。
motorola格式can报文 c解析

motorola格式can报文 c解析在CAN总线通信中,Motorola格式是一种常见的报文格式之一。
本文将介绍如何使用C编程语言解析Motorola格式的CAN报文。
首先,需要了解Motorola格式的CAN报文结构。
Motorola格式将CAN报文分为4个部分:帧ID、数据域、数据长度码和校验码。
在C语言中,我们可以通过以下方式解析Motorola格式的CAN报文:1. 帧ID解析:Motorola格式的帧ID可以是11位或29位。
对于11位ID,使用一个无符号整型变量来存储即可;对于29位ID,使用一个无符号长整型变量来存储。
2. 数据域解析:数据域是CAN报文中实际携带数据的部分。
对于Motorola格式,数据域的长度可以是0到8个字节。
我们可以使用一个字节数组来存储数据域,并根据数据长度码来确定实际的数据长度。
3. 数据长度码解析:数据长度码(DLC)表示数据域的长度。
对于Motorola格式,DLC的取值范围是0到8。
我们可以使用一个整型变量来存储这个值。
4. 校验码解析:校验码用于验证CAN报文的正确性。
对于Motorola格式,校验码是CAN报文中所有数据的异或值。
我们可以使用一个整型变量来存储校验码。
下面是一个简单的例子,演示如何使用C语言解析Motorola格式的CAN报文:```c#include <stdio.h>struct CANFrame {unsigned int frameID;unsigned char data[8];int dlc;unsigned char checksum;};void parseCANFrame(struct CANFrame frame) {printf("Frame ID: %u\n", frame.frameID);printf("Data Length Code: %d\n", frame.dlc);printf("Data: ");for(int i = 0; i < frame.dlc; i++) {printf("%02X ", frame.data[i]);}printf("\nChecksum: %02X\n", frame.checksum);}int main() {// 示例报文struct CANFrame exampleFrame = {123, {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08}, 8, 0xAB};// 解析报文parseCANFrame(exampleFrame);return 0;}```在上述代码中,我们定义了一个名为`CANFrame`的结构体,用于存储Motorola格式的CAN报文。
motorola和inter报文dbc解析

motorola和inter报文dbc解析(最新版)目录1.引言2.Motorola 和 Inter 报文的基本概念3.报文 DBC 解析的原理和方法4.Motorola 和 Inter 报文 DBC 解析的实例分析5.总结正文1.引言在通信领域,Motorola 和 Inter 报文是一种常见的数据传输方式。
它们在无线电、卫星通信以及计算机网络中都有着广泛的应用。
报文 DBC 解析是对报文进行解码和解析的过程,从而提取出报文中的有效信息。
对于 Motorola 和 Inter 报文来说,DBC 解析是至关重要的。
本文将对Motorola 和 Inter 报文 DBC 解析的原理和方法进行详细的介绍,并通过实例分析来加深理解。
2.Motorola 和 Inter 报文的基本概念Motorola 报文是一种基于 Motorola 公司开发的通信协议的报文。
它的主要特点是数据传输速率快、抗干扰能力强。
Inter 报文则是一种基于 Internet 协议的报文,主要用于计算机网络中的数据传输。
Inter 报文的主要特点是传输效率高、传输距离远。
3.报文 DBC 解析的原理和方法报文 DBC 解析,即报文数据库解析,是指通过对报文进行解码和解析,提取出报文中的有效信息。
其原理是将接收到的报文与预先设定的数据库进行比对,从而提取出报文中的有效信息。
具体的方法包括以下几个步骤:(1)预先建立一个数据库,包括报文的各种属性,如报文长度、报文格式、校验和等。
(2)接收到报文后,对其进行解码,得到报文的原始数据。
(3)将解码后的数据与数据库进行比对,提取出报文中的有效信息。
4.Motorola 和 Inter 报文 DBC 解析的实例分析以 Motorola 报文为例,假设接收到的 Motorola 报文为:11010110 11001010 11010011。
(1)首先,根据 Motorola 协议,可以知道该报文的长度为 3 个字节。
韦根协议

韦根协议Wiega nd协议是国际上统一的标准,是由摩托罗拉公司制定的一种通讯协议。
它适用于涉及门禁控制系统的读卡器和卡片的许多特性。
它有很多格式,标准的26-bit应该是最常用的格式。
此外,还有34-bit、37-bit等格式。
而标准26-bit格式是一个开放式的格式,这就意味着任何人都可以购买某一特定格式的HID卡,并且这些特定格式的种类是公开可选的。
26-Bit格式就是一个广泛使用的工业标准,并且对所有HID的用户开放。
几乎所有的门禁控制系统都接受标准的26-Bit格式。
简介Wiegand协议是国际上统一的标准,有很多格式,标准的26-bit应该是最常用的格式。
此外,还有34-bit、37-bit等格式。
但是安防行业并不愿意把这些格式公开,而安防公司也常常变化这些格式来保证产品的保密性。
而标准26-bit格式是一个开放式的格式,这就意味着任何人都可以购买某一特定格式的HID卡,并且这些特定格式的种类是公开可选的。
26-Bit格式就是一个广泛使用的工业标准,并且对所有HID的用户开放。
几乎所有的门禁控制系统都接受标准的26-Bit格式。
Wiegand (韦根)协议是由摩托罗拉公司制定的一种通讯协议,它适用于涉及门禁控制系统的读卡器和卡片的许多特性;其协议并没有定义通讯的波特率、也没有定义数据长度韦根格式主要定义是数据传输方式:DataO和Datal两根数据线分别传输0和1.现在应用最多的是26bit,34bit,36bit,44bit 等等。
韦根数据输出的基本概念ov■45Vov二进制号码o1韦根26位输出格式标准韦根输出是由 26位二进制数 组成,每一位的含义如下:1 2 9 10 25 26X X X X X X X X X X X X X X X X X X X X X X X X X X 二进制第1位为2 —13位的偶校验位 第29位对应与电子卡HID 码的低8位第10-25位对应电子卡的 PID 号码这26位数据在读出器的韦根输出线 DO , D1上输出。
摩托罗拉g53快充协议

摩托罗拉g53快充协议摩托罗拉G53快充协议一、协议概述摩托罗拉G53快充协议是一项针对摩托罗拉G53手机的快速充电协议,旨在提供更快、更安全、更便捷的充电体验。
本协议由摩托罗拉公司制定,适用于所有支持G53快充的充电器和设备。
二、协议特点1. 快速充电:采用高效能的芯片和优化设计,可在短时间内将手机电量从0%提高至50%以上。
2. 安全保护:内置多重保护机制,包括过压保护、过流保护、短路保护等,有效防止意外情况发生。
3. 兼容性强:支持多种输入电压和输出电流,适用于各类场景和设备。
4. 节能环保:采用智能调节技术,可根据实际需求自动调整输出功率,最大程度地减少浪费。
三、协议规范1. 输入电压范围:100-240V AC 50/60Hz;2. 输出电压范围:5V DC;3. 输出电流范围:最大3A;4. 充电时间:在正常使用情况下,可在30分钟内将电量从0%提高至50%以上;5. 充电器外观:尺寸为45mm*45mm*25mm,重量约50g,采用ABS材料制成。
四、协议实施1. 充电器制造商应当遵守本协议的规范,保证产品符合安全、稳定、高效的要求;2. 用户应当使用符合本协议规范的充电器和设备,以保证最佳的充电效果和安全性;3. 在使用充电器时,请勿将其长时间暴露在高温或潮湿环境中,以免影响其性能和寿命;4. 如有任何异常情况发生,请立即停止使用,并联系相关厂商或售后服务人员。
五、协议扩展1. 本协议适用于所有支持G53快充的充电器和设备;2. 本协议可根据技术进步和市场需求进行扩展和更新;3. 未经摩托罗拉公司授权,任何单位或个人不得擅自修改或篡改本协议内容。
六、结语摩托罗拉G53快充协议是一项为用户提供更快、更安全、更便捷的充电体验的技术规范,希望各制造商和用户能够共同遵守,并在实际使用中充分发挥其优势。
can解析库摩托罗拉格式

can解析库摩托罗拉格式摘要:1.介绍Can 解析库2.摩托罗拉格式的概述3.Can 解析库与摩托罗拉格式的关系4.使用Can 解析库解析摩托罗拉格式的步骤5.总结正文:一、介绍Can 解析库CAN(Controller Area Network)解析库是一种用于解析CAN 总线通信协议的软件库,它可以帮助开发者更方便地处理和解析CAN 总线上的数据。
CAN 解析库广泛应用于汽车电子、工业自动化等领域,可以大大简化开发者的工作量,提高开发效率。
二、摩托罗拉格式的概述摩托罗拉格式(Motorola format)是一种数据传输格式,常用于CAN 总线通信。
它的主要特点是数据帧的前缀和后缀固定为“55”和“11”,即帧起始符为“55”,帧结束符为“11”。
此外,摩托罗拉格式还具有CRC (Cyclic Redundancy Check)校验功能,用于检测数据传输中的错误。
三、Can 解析库与摩托罗拉格式的关系CAN 解析库与摩托罗拉格式密切相关。
CAN 解析库提供了对CAN 总线通信协议的支持,而摩托罗拉格式是CAN 总线通信中的一种数据传输格式。
使用CAN 解析库,开发者可以方便地处理和解析摩托罗拉格式的数据帧。
四、使用Can 解析库解析摩托罗拉格式的步骤1.首先,需要选择一个合适的CAN 解析库,例如:Pcan、CANlib 等。
选择解析库时,需要考虑其兼容性、性能、易用性等因素。
2.在使用CAN 解析库之前,需要对其进行配置。
配置内容包括:设置波特率、选择CAN 硬件设备、配置数据帧的格式(包括帧长度、帧起始符、帧结束符等)等。
3.初始化CAN 解析库,并创建一个CAN 设备对象。
4.使用CAN 设备对象,发送和接收数据帧。
发送数据帧时,需要将数据帧按照摩托罗拉格式进行组装;接收数据帧时,CAN 解析库会自动将数据帧解组装,并根据配置的信息进行CRC 校验。
5.对接收到的数据帧进行解析,根据需要对数据进行处理。
(完整)SPI协议及工作原理分析

SPI协议及工作原理分析一、概述.SPI, Serial Perripheral Interface, 串行外围设备接口, 是 Motorola 公司推出的一种同步串行接口技术. SPI 总线在物理上是通过接在外围设备微控制器(PICmicro) 上面的微处理控制单元 (MCU) 上叫作同步串行端口(Synchronous Serial Port) 的模块(Module)来实现的, 它允许 MCU 以全双工的同步串行方式, 与各种外围设备进行高速数据通信.SPI 主要应用在 EEPROM, Flash, 实时时钟(RTC), 数模转换器(ADC), 数字信号处理器(DSP) 以及数字信号解码器之间. 它在芯片中只占用四根管脚 (Pin) 用来控制以及数据传输, 节约了芯片的 pin 数目, 同时为 PCB 在布局上节省了空间. 正是出于这种简单易用的特性, 现在越来越多的芯片上都集成了 SPI技术.二、特点1. 采用主-从模式(Master-Slave) 的控制方式SPI 规定了两个 SPI 设备之间通信必须由主设备 (Master) 来控制次设备(Slave). 一个 Master 设备可以通过提供 Clock 以及对 Slave 设备进行片选(Slave Select) 来控制多个 Slave 设备, SPI 协议还规定 Slave 设备的 Clock 由 Master 设备通过 SCK 管脚提供给 Slave 设备, Slave 设备本身不能产生或控制Clock, 没有 Clock 则 Slave 设备不能正常工作.2. 采用同步方式(Synchronous)传输数据Master 设备会根据将要交换的数据来产生相应的时钟脉冲(Clock Pulse), 时钟脉冲组成了时钟信号(Clock Signal) , 时钟信号通过时钟极性 (CPOL) 和时钟相位 (CPHA) 控制着两个 SPI 设备间何时数据交换以及何时对接收到的数据进行采样, 来保证数据在两个设备之间是同步传输的.3. 数据交换(Data Exchanges)SPI 设备间的数据传输之所以又被称为数据交换, 是因为 SPI 协议规定一个SPI 设备不能在数据通信过程中仅仅只充当一个 "发送者(Transmitter)" 或者 "接收者(Receiver)". 在每个 Clock 周期内, SPI 设备都会发送并接收一个 bit 大小的数据, 相当于该设备有一个 bit 大小的数据被交换了.一个 Slave 设备要想能够接收到 Master 发过来的控制信号, 必须在此之前能够被 Master 设备进行访问 (Access). 所以, Master 设备必须首先通过 SS/CS pin 对 Slave 设备进行片选, 把想要访问的 Slave 设备选上.在数据传输的过程中, 每次接收到的数据必须在下一次数据传输之前被采样. 如果之前接收到的数据没有被读取, 那么这些已经接收完成的数据将有可能会被丢弃, 导致 SPI 物理模块最终失效. 因此, 在程序中一般都会在 SPI 传输完数据后, 去读取 SPI 设备里的数据, 即使这些数据(Dummy Data)在我们的程序里是无用的.三、工作机制1. 概述上图只是对 SPI 设备间通信的一个简单的描述, 下面就来解释一下图中所示的几个组件(Module):SSPBUF, Synchronous Serial Port Buffer, 泛指 SPI 设备里面的内部缓冲区, 一般在物理上是以 FIFO 的形式, 保存传输过程中的临时数据;SSPSR, Synchronous Serial Port Register, 泛指 SPI 设备里面的移位寄存器(Shift Regitser), 它的作用是根据设置好的数据位宽(bit-width) 把数据移入或者移出 SSPBUF;Controller, 泛指 SPI 设备里面的控制寄存器, 可以通过配置它们来设置SPI 总线的传输模式.通常情况下, 我们只需要对上图所描述的四个管脚(pin) 进行编程即可控制整个 SPI 设备之间的数据通信:SCK, Serial Clock, 主要的作用是 Master 设备往 Slave 设备传输时钟信号, 控制数据交换的时机以及速率;SS/CS, Slave Select/Chip Select, 用于 Master 设备片选 Slave 设备, 使被选中的 Slave 设备能够被 Master 设备所访问;SDO/MOSI, Serial Data Output/Master Out Slave In, 在 Master 上面也被称为 Tx-Channel, 作为数据的出口, 主要用于 SPI 设备发送数据;SDI/MISO, Serial Data Input/Master In Slave Out, 在 Master 上面也被称为 Rx-Channel, 作为数据的入口, 主要用于SPI 设备接收数据;SPI 设备在进行通信的过程中, Master 设备和 Slave 设备之间会产生一个数据链路回环(Data Loop), 就像上图所画的那样, 通过 SDO 和 SDI 管脚, SSPSR 控制数据移入移出 SSPBUF, Controller 确定 SPI 总线的通信模式, SCK 传输时钟信号.2. Timing.上图通过 Master 设备与 Slave 设备之间交换 1 Byte 数据来说明 SPI 协议的工作机制.首先, 在这里解释一下两个概念:CPOL: 时钟极性, 表示 SPI 在空闲时, 时钟信号是高电平还是低电平. 若CPOL 被设为 1, 那么该设备在空闲时 SCK 管脚下的时钟信号为高电平. 当 CPOL 被设为 0 时则正好相反.CPHA: 时钟相位, 表示 SPI 设备是在 SCK 管脚上的时钟信号变为上升沿时触发数据采样, 还是在时钟信号变为下降沿时触发数据采样. 若 CPHA 被设置为 1, 则 SPI 设备在时钟信号变为下降沿时触发数据采样, 在上升沿时发送数据. 当 CPHA 被设为 0 时也正好相反.上图里的 "Mode 1, 1" 说明了本例所使用的 SPI 数据传输模式被设置成CPOL = 1, CPHA = 1. 这样, 在一个 Clock 周期内, 每个单独的 SPI 设备都能以全双工(Full-Duplex) 的方式, 同时发送和接收 1 bit 数据, 即相当于交换了 1 bit 大小的数据. 如果 SPI 总线的 Channel-Width 被设置成 Byte, 表示 SPI 总线上每次数据传输的最小单位为 Byte, 那么挂载在该 SPI 总线的设备每次数据传输的过程至少需要 8 个 Clock 周期(忽略设备的物理延迟). 因此, SPI 总线的频率越快, Clock 周期越短, 则 SPI 设备间数据交换的速率就越快.3. SSPSR.SSPSR 是 SPI 设备内部的移位寄存器(Shift Register). 它的主要作用是根据 SPI 时钟信号状态, 往 SSPBUF 里移入或者移出数据, 每次移动的数据大小由Bus-Width 以及 Channel-Width 所决定.Bus-Width 的作用是指定地址总线到 Master 设备之间数据传输的单位.例如, 我们想要往 Master 设备里面的 SSPBUF 写入 16 Byte 大小的数据: 首先, 给Master 设备的配置寄存器设置Bus-Width 为Byte; 然后往Master 设备的 Tx-Data 移位寄存器在地址总线的入口写入数据, 每次写入 1 Byte 大小的数据(使用 writeb 函数); 写完 1 Byte 数据之后, Master 设备里面的Tx-Data 移位寄存器会自动把从地址总线传来的1 Byte 数据移入 SSPBUF 里; 上述动作一共需要重复执行 16 次.Channel-Width 的作用是指定 Master 设备与 Slave 设备之间数据传输的单位. 与Bus-Width 相似, Master 设备内部的移位寄存器会依据Channel-Width 自动地把数据从 Master-SSPBUF 里通过 Master-SDO 管脚搬运到 Slave 设备里的 Slave-SDI 引脚, Slave-SSPSR 再把每次接收的数据移入Slave-SSPBUF里.通常情况下, Bus-Width 总是会大于或等于 Channel-Width, 这样能保证不会出现因 Master 与 Slave 之间数据交换的频率比地址总线与 Master 之间的数据交换频率要快, 导致 SSPBUF 里面存放的数据为无效数据这样的情况.4. SSPBUF.我们知道, 在每个时钟周期内, Master 与 Slave 之间交换的数据其实都是 SPI 内部移位寄存器从 SSPBUF 里面拷贝的. 我们可以通过往 SSPBUF 对应的寄存器 (Tx-Data / Rx-Data register) 里读写数据, 间接地操控 SPI 设备内部的SSPBUF.例如, 在发送数据之前, 我们应该先往 Master 的 Tx-Data 寄存器写入将要发送出去的数据, 这些数据会被 Master-SSPSR 移位寄存器根据 Bus-Width 自动移入Master-SSPBUF 里, 然后这些数据又会被Master-SSPSR 根据Channel-Width 从Master-SSPBUF 中移出, 通过Master-SDO 管脚传给Slave-SDI 管脚, Slave-SSPSR 则把从 Slave-SDI 接收到的数据移入Slave-SSPBUF 里. 与此同时, Slave-SSPBUF 里面的数据根据每次接收数据的大小(Channel-Width), 通过 Slave-SDO 发往 Master-SDI, Master-SSPSR 再把从Master-SDI 接收的数据移入 Master-SSPBUF.在单次数据传输完成之后, 用户程序可以通过从 Master 设备的 Rx-Data 寄存器读取 Master 设备数据交换得到的数据.5. Controller.Master 设备里面的 Controller 主要通过时钟信号(Clock Signal)以及片选信号(Slave Select Signal)来控制 Slave 设备. Slave 设备会一直等待, 直到接收到 Master 设备发过来的片选信号, 然后根据时钟信号来工作.Master 设备的片选操作必须由程序所实现. 例如: 由程序把 SS/CS 管脚的时钟信号拉低电平, 完成 SPI 设备数据通信的前期工作; 当程序想让 SPI 设备结束数据通信时, 再把 SS/CS 管脚上的时钟信号拉高电平.。
can解析库摩托罗拉格式

can解析库摩托罗拉格式摩托罗拉(Motorola)格式是一种常用的数据传输格式,广泛应用于控制领域中的CAN(Controller Area Network)通信。
CAN解析库则是用于解析摩托罗拉格式数据的关键组件,它提供了一种便捷的方式来处理CAN通信中的数据。
本文将介绍CAN解析库的基本原理、使用场景以及摩托罗拉格式的解析方法。
第一节:CAN解析库基本原理CAN解析库是一种用于处理CAN通信数据的软件开发工具。
它通过解析CAN消息中的字节、位和信号等信息,将原始的二进制数据转换为可读的物理量或状态。
在CAN通信中,每个CAN消息由标识符、数据和控制字段组成。
CAN解析库通过读取这些字段的值,并根据预定义的信号和位定义,将其转换为实际的传感器数据或控制命令。
第二节:CAN解析库的使用场景CAN解析库在许多应用场景中都可以发挥重要作用。
例如,在汽车行业中,CAN总线是车辆电子系统中最常用的通信协议之一。
通过使用CAN解析库,工程师可以轻松解析车辆上各个传感器(如车速、油门位置、转向角等)的数据,实现车辆状态监测、故障诊断和控制功能。
此外,CAN解析库还广泛应用于航空、航天、工业自动化等领域,用于数据采集、监控和控制等用途。
第三节:摩托罗拉格式的解析方法摩托罗拉格式是一种经典的CAN消息格式,主要由标识符、数据长度码(DLC)、数据区和校验码组成。
其中,标识符用于唯一标识CAN消息的发送者和接收者,数据长度码表示数据区的字节数,数据区存储着实际的数据信息,校验码用于验证消息的完整性。
摩托罗拉格式的解析方法主要包括以下几个步骤:1. 读取标识符:根据摩托罗拉格式的定义,标识符位于CAN消息的前几个字节中。
可以通过位操作的方式,将标识符字段解析为实际的数值或标识符类型。
2. 读取数据长度码:数据长度码用于表示数据区的长度,可以通过读取数据长度码来确定数据区字节的个数。
3. 解析数据区:根据数据长度码的值,读取相应长度的字节,并根据信号定义将其转换为实际的物理量或状态。
can解析库摩托罗拉格式

can解析库摩托罗拉格式
“CAN解析库”和“摩托罗拉格式”是两个不同的概念,它们分别涉及到不同的领域和应用。
1、CAN解析库:
CAN解析库是一种用于解析CAN总线(Controller Area Network)上数据的工具或软件库。
CAN总线是一种广泛用于汽车、工业自动化和其它领域的通讯协议。
CAN解析库可以用于读取、解析和转换CAN 总线上的数据,以便于开发人员能够更好地理解和处理这些数据。
CAN解析库通常提供了一组函数和工具,以便于开发人员能够解析CAN总线上的数据包(frames)和信号(signals)。
这些函数和工具可以帮助开发人员将原始的CAN数据转换为更有意义的格式,以便于进一步的分析和处理。
2、摩托罗拉格式:
摩托罗拉格式通常指的是摩托罗拉设备或系统所使用的特定数据格式或通讯协议。
摩托罗拉是一家全球知名的电子通讯设备制造商,其产品包括移动设备、无线通信设备和网络设备等。
摩托罗拉格式可能涉及到不同的数据传输协议、数据格式或接口标准。
对于开发人员来说,了解摩托罗拉格式有助于更好地与摩托罗拉设备或系统进行交互和通信。
操作方面,对于CAN解析库,开发人员通常需要使用特定的编程语言(如C++、Python等)来调用库中的函数,以便于读取、解析和转换CAN总线上的数据。
而对于摩托罗拉格式,开发人员可能需要
使用特定的开发工具或库来与摩托罗拉设备或系统进行通信,这可能涉及到与摩托罗拉设备或系统进行连接、发送和接收数据等操作。
科尔诺mot200通讯协议

科尔诺mot200通讯协议摘要:一、科尔诺MOT200 通讯协议概述二、科尔诺MOT200 通讯协议的功能和特点三、科尔诺MOT200 通讯协议的应用场景四、科尔诺MOT200 通讯协议的发展前景正文:一、科尔诺MOT200 通讯协议概述科尔诺MOT200 通讯协议是一种基于摩托罗拉MOTOROLA MOT200 模块的通讯协议,该模块广泛应用于各种工业自动化领域,如电力、水处理、石油化工等。
科尔诺MOT200 通讯协议具有高可靠性、开放性、互操作性等特点,可以实现数据采集、监控、控制等功能,为工业企业提供了一种高效、稳定的通讯解决方案。
二、科尔诺MOT200 通讯协议的功能和特点1.高可靠性:科尔诺MOT200 通讯协议采用了可靠的数据传输机制,可以确保数据在传输过程中的完整性和准确性,避免了因数据传输错误导致的系统故障。
2.开放性:科尔诺MOT200 通讯协议支持多种网络协议,如TCP/IP、MODBUS、PROFIBUS 等,可以实现不同厂商、不同设备之间的数据交换,降低了系统集成的难度和成本。
3.互操作性:科尔诺MOT200 通讯协议可以兼容多种工业自动化设备,如PLC、PAC、工控机等,可以实现不同设备之间的数据互通,提高了系统的互操作性。
4.扩展性:科尔诺MOT200 通讯协议支持灵活的模块扩展,可以根据用户的需求添加或删除功能模块,满足不同用户的需求。
5.易维护性:科尔诺MOT200 通讯协议采用了标准化的编程接口,可以实现设备的快速配置和维护,降低了系统的维护成本。
三、科尔诺MOT200 通讯协议的应用场景科尔诺MOT200 通讯协议广泛应用于各种工业自动化领域,如电力、水处理、石油化工等。
以下是一些具体的应用场景:1.数据采集:科尔诺MOT200 通讯协议可以实现对各种传感器、仪表等设备的数据采集,如温度、压力、流量等,便于实现对生产过程的实时监控。
2.设备控制:科尔诺MOT200 通讯协议可以实现对各种执行器、驱动器等设备的控制,如电机、阀门等,有助于实现对生产过程的实时调整。
SPI(SerialPeripheralInterface)协议

SPI(SerialPeripheralInterface)协议SPI是串⾏外设接⼝(Serial Peripheral Interface)的缩写,是Motorola推出的⼀种同步串⾏接⼝技术,是⼀种⾼速的、全双⼯、同步的通信总线。
全双⼯:host能与外围从设备之间的发送线和接收线各⾃独⽴,能同时进⾏发送数据和接收数据。
源同步传输⽂章内容SPI介绍SPI协议通信时序详解SPI数据传输⽅式SPI总线优缺点1、SPI介绍应⽤场景SPI协议主要⽤于短距离的通信系统中,特别是嵌⼊式系统:存储器:RAM,EEPROM,Flash等数模转换器:A/D, D/A转换器等驱动接⼝:LED显⽰驱动器,I/O接⼝芯⽚,UART接收器等。
主从模式控制:SPI以主从⽅式进⾏⼯作,这种模式通常包含⼀个master和⼀个或多个slave,需要⾄少4根线(在单向传输时3根也可以),分别为:SDO/MOSI(master output slave input):主设备数据输出,从设备数据输⼊;SDI/MISO(master input slave output):主设备数据输⼊,从设备数据输出;SCLK:时钟信号,由主设备产⽣;CS/SS:⽚选信号,主设备控制并⽤于选择与其通信的从设备。
多Slave的SPI协议SPI协议可以操作在⼀个master对应⼀个或者多个slave的条件下,此时有多个CS/SS⽚选信号,但是⼀个时间只能有⼀个⽚选信号有效。
slave的输出端⼝MISO都是三态驱动;⾼电平,低电平和不选中时输出为⾼阻态。
数据交换(data exchanges)SPI设备之间的数据传输称为数据交换⽽不是数据传输。
这是因为SPI设备不能在进⾏数据通信的过程中仅充当transmitter和recieiver的⾓⾊,⽽是在每个时钟周期内,主从SPI设备都会发送1bit⼤⼩的数据,相当于主从设备进⾏了1bit的数据交换。
在数据的传输过程中,每次接收到的数据必须在下⼀次数据传输之前被采样,如果之前接收的数据没有被采样,那么这些已经收到的数据可能被丢弃,导致 SPI 模块最终失效,因此,在程序中,⼀般都会在 SPI 传输完数据之后,去读取 SPI 设备⾥⾯的数据,即使这些数据是在我们程序中是没有⽤的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、协议中Type是指Message Type,P是指Periodic message (注:The message is transmitted on a periodic basis only. The signals in the Periodic message do not have the ability to generate an event transmission of the message. All signals in a message may not have the same requirements on up-date time. Signals that have a lower requirement on the up-date time than the periodicity of the periodic message do not have to be up-dated every time the message is sent. However, the up-date time requirement has to be fulfilled for each signal, as defined by the Signal Age.)
2、协议中是motolora格式;
3、电池的总电流偏置-1600,是确定的格式,(当D=32000时,电流为0A。
)
附:
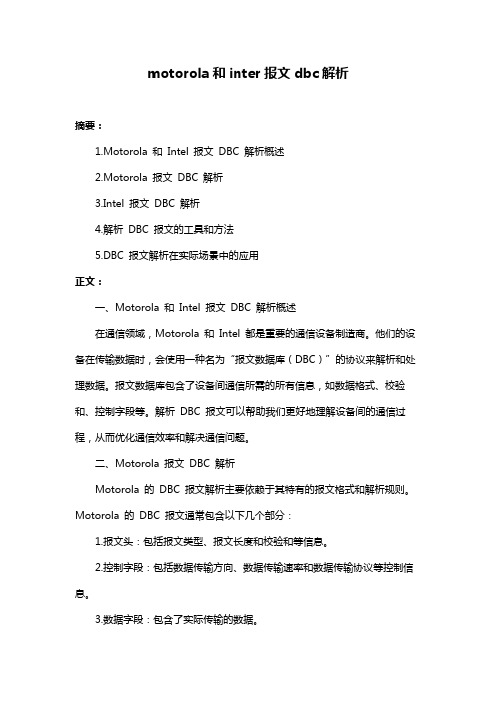
Position of signal in the CAN frame
Each signal occupies a number of bit-positions in the Message Map, as indicated by the position range.
The relation between the bit-positions used in the Message Map and the Byte/Bit position in the CAN frame is a static representation as illustrated in Table 1. Byte #0 in the table corresponds to the first data byte transmitted or received in the CAN frame, and Byte #n ( “n” is included between 0 and 7) is the last byte.
Bit #7 is the most significant bit in the byte.
Transmitting a message with 8 byte length on the bus, bit 7 (most significant bit of byte 0) will be transmitted first, followed by bit 6. Bit 56 (least significant bit of byte 7) will be transmitted at last.
Bits row out:
7,6,5,4,3,2,1,0,15,14,13,12,11,10,9,8,23, ………………,40,55,54,53,52,51,50,49,48,63,62,61,60 ,59,58,57,56
When a Module receives a message, the first bit received will be the bit located at position 7 in
Table 1: Illustration of Message Map bit positions in a CAN frame
Accessing the Signal within a 64 bits block requires a common indexing standard; “Motorola Forward LSB” notation has been adopted.
Example:
Let us assume a Signal called “RPM” has:
- Its least significant bit on bit 16 of the 64 bits data field;
- 12 bits data length。