一种简单的灰度图像边缘检测算法
halcon边缘检测例子
halcon边缘检测例子Halcon是一款功能强大的机器视觉库,其边缘检测功能可以帮助我们在图像中找出物体的边缘,从而实现目标检测和分割。
下面将以Halcon边缘检测例子为题,列举一些常用的边缘检测方法和技巧。
一、Sobel算子边缘检测Sobel算子是一种常用的边缘检测算法,它通过计算图像的一阶导数来寻找边缘。
Halcon中可以使用函数SobelA来实现Sobel算子的边缘检测,可以设置不同的参数来调整检测结果的灵敏度。
二、Canny算子边缘检测Canny算子是一种经典的边缘检测算法,它结合了高斯滤波、梯度计算和非最大值抑制等步骤,可以得到更准确的边缘检测结果。
Halcon中可以使用函数EdgesSubPix来实现Canny算子的边缘检测,可以设置不同的参数来调整检测结果的质量和灵敏度。
三、Laplacian算子边缘检测Laplacian算子是一种基于二阶导数的边缘检测算法,它可以检测出图像中的高频变化,从而找到边缘。
Halcon中可以使用函数Laplace来实现Laplacian算子的边缘检测,可以设置不同的参数来调整检测结果的灵敏度。
四、Roberts算子边缘检测Roberts算子是一种简单但有效的边缘检测算法,它通过计算图像中像素点的灰度差来判断是否存在边缘。
Halcon中可以使用函数RobertsA来实现Roberts算子的边缘检测,可以设置不同的参数来调整检测结果的灵敏度。
五、Prewitt算子边缘检测Prewitt算子是一种基于一阶导数的边缘检测算法,它通过计算图像中像素点的灰度变化来寻找边缘。
Halcon中可以使用函数PrewittA来实现Prewitt算子的边缘检测,可以设置不同的参数来调整检测结果的灵敏度。
六、Scharr算子边缘检测Scharr算子是一种改进的Sobel算子,它可以更好地抵抗噪声干扰,提供更准确的边缘检测结果。
Halcon中可以使用函数ScharrA来实现Scharr算子的边缘检测,可以设置不同的参数来调整检测结果的灵敏度。
图像处理中的边缘检测算法分析与优化

图像处理中的边缘检测算法分析与优化随着数字图像处理技术的不断发展,边缘检测在计算机视觉、模式识别和图像分割等领域中扮演着重要的角色。
边缘是图像中灰度变化较大的区域,通过检测边缘,我们可以提取图像的形状和结构信息,从而实现图像分析和理解。
本文将对常用的图像处理边缘检测算法进行分析,并探讨优化策略。
一、边缘检测算法概述1.1 Sobel算法Sobel算法是一种基于梯度的边缘检测算法,它通过计算图像梯度的大小和方向来确定边缘位置。
Sobel算法具有计算简单、鲁棒性较高的优点,但对噪声比较敏感,在图像边缘不够明显或存在噪声时容易引入误检。
1.2 Canny算法Canny算法是一种经典的边缘检测算法,它通过多个步骤来实现高效的边缘检测。
首先,通过高斯滤波器对图像进行平滑处理,以减少噪声的影响。
然后,计算图像的梯度幅值和方向,并进行非极大值抑制,以精确地定位边缘。
最后,通过滞后阈值法来进行边缘的连接和细化。
Canny算法具有良好的边缘定位能力和抗噪能力,在实际应用中被广泛使用。
1.3 Laplacian算子Laplacian算子是一种基于二阶导数的边缘检测算子,它通过计算图像的二阶导数来检测图像中的边缘。
Laplacian算子具有对灰度变化较大的边缘敏感的优点,但对噪声比较敏感,容易产生边缘断裂和误检。
为了提高Laplacian算子的效果,常常与高斯滤波器结合使用,以减少噪声的干扰。
二、边缘检测算法优化2.1 参数选择在边缘检测算法中,参数的选择对于最终的结果具有重要的影响。
例如,对于Canny算法来说,高斯滤波器的大小和标准差的选择直接影响到边缘的平滑程度和定位精度。
因此,在优化边缘检测算法时,需要根据具体的应用场景和图像特点选择合适的参数。
2.2 非极大值抑制非极大值抑制是Canny算法中的一种重要步骤,用于精确地定位边缘位置。
然而,在进行非极大值抑制时,会产生边缘断裂和不连续的问题。
为了解决这个问题,可以考虑使用像素邻域信息进行插值,从而减少边缘的断裂,并得到更连续的边缘。
图像边缘检测的方法

图像边缘检测的方法图像边缘检测是在计算机视觉领域中一项重要的任务,它可以用来提取图像中物体的轮廓或边界信息。
常用的图像边缘检测方法包括基于梯度的方法、基于边缘模型的方法和基于机器学习的方法。
1. 基于梯度的方法基于梯度的方法通过计算图像中灰度的梯度来检测图像的边缘。
常用的基于梯度的方法包括Sobel算子、Prewitt算子和Canny算子。
(1)Sobel算子:Sobel算子是一种常用的边缘检测算子,它通过在图像中滑动一个3x3的卷积核来计算图像灰度的梯度。
它分别计算水平和垂直方向上的梯度,并将两个方向上的梯度相加得到最终的边缘强度。
(2)Prewitt算子:Prewitt算子与Sobel算子类似,也是通过计算图像灰度的水平和垂直方向上的梯度来检测边缘。
不同之处在于Prewitt算子使用了不同的卷积核,其效果也有所差异。
(3)Canny算子:Canny算子是一种边缘检测算法,它通过多个步骤来获得较为准确的边缘结果。
首先,它使用高斯滤波器对图像进行平滑处理,然后计算图像灰度梯度的幅值和方向。
接着,通过非极大值抑制来细化边缘。
最后,使用双阈值处理来检测和连接真正的边缘。
2. 基于边缘模型的方法基于边缘模型的方法是利用边缘在图像中的几何特征来进行检测。
常用的基于边缘模型的方法包括Hough变换和边缘跟踪算法。
(1)Hough变换:Hough变换是一种广泛应用于边缘检测的方法,它可以将图像中的边缘表示为参数空间中的曲线或直线。
通过在参数空间中寻找曲线或直线的交点,可以得到图像中的边缘。
(2)边缘跟踪算法:边缘跟踪算法是一种基于像素领域关系的边缘检测方法。
它首先选择一个起始点作为边缘点,然后根据一定的规则选择下一个与当前点相邻的点作为新的边缘点,并将其加入到边缘集合中。
通过不断跟踪边缘点,可以得到完整的边缘。
3. 基于机器学习的方法基于机器学习的方法是近年来较为流行的一种图像边缘检测方法。
它利用大量的已标注的训练数据来训练模型,然后使用训练好的模型对新的图像进行边缘检测。
灰度检测算法
灰度检测算法
灰度检测算法,简称灰度算法,是一种常用的图像处理算法,用于将彩色图像转换成灰度图像。
灰度图像只包含灰度值而不包含彩色信息,通常用于图像分析、图像处理、目标检测等领域。
下面是一个简单的灰度检测算法示例:
1. 读取彩色图像。
2. 将彩色图像转换成灰度图像。
可以使用以下公式将彩色像素点的RGB值转换成灰度值:
灰度值 = 0.299 * 红色通道值 + 0.587 * 绿色通道值 + 0.114 * 蓝色通道值
红色通道值、绿色通道值和蓝色通道值的取值范围为0-255。
3. 对每个灰度图像像素点进行灰度阈值检测。
如果灰度值小于某个设定的阈值,则该像素点被认为是黑色;如果灰度值大于等于阈值,则该像素点被认为是白色。
4. 输出处理后的灰度图像。
这是一个简单的灰度检测算法示例,可以根据具体需求进行优化和改进。
在实际应用中,还可以添加其他步骤,如图像预处理、边缘检测等,以提高算法的准确性和效果。
需要注意的是,本算法仅为示例,实际使用时,应根据具体情况进行改进和优化,并进行合理的测试和验证。
一种基于灰度自适应红外图像边缘检测方法
第35卷,增刊V bl .35Suppl em ent 红外与激光工程Infj m d 加d LaSer Engi nee 血g2006年10月oc t .2006一种基于灰度自适应红外图像边缘检测方法王永义,杨卫平(国防科技大学A 瓜国家重点实验室,湖南长沙410073)摘要:针对天空背景下红外成像灰度特点,本文介绍了一种简单可行自适应边缘检测方法。
首先对红外图像进行自适应灰度增强预处理,接着用自适应最优阈值分割得到原图的二值图像,最后依据形态腐蚀方法获取目标边缘,实验表明,该方法除噪能力强,定位精度高,具有连续的边缘检测能力。
关键词:自适应灰度增强;自适应阈值分割;形态腐蚀;边缘检测中圈分类号:TP391文献标识码l A 文章编号:1007—2276(2006)增D 一0291-04A n adapt i V e edge det ect i on m et hod ba s eon gr ay of I R i m a ge W r A N G Y bn g —yi Y A N G W |ei -ping(1研I abo 髓t or yf br 加r K N a 廿伽I al uni V eB 姆of D cf cn ∞Tecl l I l ol ogy ,C h 柚gSl I a4100r 73。
aI i na)A bs t 瑚屺t :A fe a si bl e ad apt i V e edg e det ect i on m em od i s i n 臼oduced .Fi r sny ,吐l e I R i m age hasa prepr ocess i l l g of ada 砸ve enha ncement ;t I l en 撒er ada 砸V e opt i I I l i za t i on t hres ho l d segm e 舭,we caI l get a bm a r y i m a ge ;The l ast s t 印i s eros i on operat i on .The r e sul t s of exp edl I l ent a_bout m e ed ge of 洫aget a 唱et s h ow t l lat t hi s m et l l od has a good ef !f 酏t i n noi s e suppr es si on ,pr l ,ci s i on ed ge and cont i nuous edge .K ey w or ds :A dapt i V e gr ay enhancement ;A da pt i V e t t l r eshol d s egm 朋t at ion ;M or phol ogi ca l er os i on ;E dg e det e ct i on O 引言红外图像反映了目标及其周围的温度分布情况,通常情况下,由于目标高速运动时与空气发生摩擦,目标的温度将高于环境温度,在红外图像中的表现就是目标区域的灰度总是高于背景灰度。
用sobel算子计算梯度例题

用sobel算子计算梯度例题Sobel算子是一种简单而常用的边缘检测算法,可以用于计算图像灰度值的一阶差分,从而得到图像领域的梯度。
Sobel算子基于离散卷积操作,对图像的每个像素点应用一个3x3的卷积核,计算其在x和y方向上的梯度,最终得到梯度幅值和方向。
下面是一个使用Sobel算子计算梯度的例题。
假设我们有一个灰度图像,如下所示:```23 44 56 34 1240 41 65 21 1719 32 43 71 2926 38 79 74 3653 31 68 25 47```我们首先需要定义两个Sobel卷积核,一个用于计算x方向上的梯度,另一个用于计算y方向上的梯度。
这两个卷积核如下所示:```Sx = [[-1, 0, 1],[-2, 0, 2],[-1, 0, 1]]Sy = [[-1, -2, -1],[ 0, 0, 0],[ 1, 2, 1]]```接下来,我们将这两个卷积核分别应用于原始图像,计算每个像素点在x和y方向上的梯度。
对于x方向上的梯度,我们通过将Sx卷积核与原始图像进行离散卷积操作,得到如下结果:```-34 -34 -77 -51 22-30 -24 -135 -50 3214 -9 -106 -17 4219 -41 -85 -59 1322 -37 -57 9 50```对于y方向上的梯度,我们通过将Sy卷积核与原始图像进行离散卷积操作,得到如下结果:```-95 -132 -9 37 -1225 82 -120 -57 -64-58 -56 -43 -7 2811 -6 36 35 -222 -7 41 42 5```接下来,我们可以使用计算得到的梯度值来得到梯度幅值。
梯度幅值可以简单地通过计算每个像素点在x和y方向上梯度值的模来得到。
```104 150 86 65 2252 102 144 72 5364 59 113 74 5029 43 95 84 1531 43 71 44 52```最后,我们还可以计算梯度方向,通过计算每个像素点在x和y方向上梯度值的反正切来得到。
拉普拉斯边缘检测算法
拉普拉斯边缘检测算法边缘检测是数字图像处理中的一个基本问题,它的任务是从一幅图像中找出物体的边界。
边界的定义是物体内部的灰度变化很大的地方,比如物体与背景之间的边界或者物体内部的边界。
边缘检测可以被广泛应用于计算机视觉、机器人控制、数字信号处理等领域。
本文将介绍一种常用的边缘检测算法——拉普拉斯边缘检测算法。
拉普拉斯边缘检测算法是一种基于二阶微分的算法。
它的基本思想是在图像中寻找像素灰度值变化明显的位置,这些位置就是边缘的位置。
具体来说,该算法使用拉普拉斯算子来进行图像的二阶微分,然后通过对图像进行阈值处理来得到边缘。
在数学上,拉普拉斯算子可以表示为:∇2f(x,y) = ∂2f(x,y)/∂x2 + ∂2f(x,y)/∂y2其中,f(x,y)是图像上的像素灰度值,∂2f(x,y)/∂x2和∂2f(x,y)/∂y2分别是图像在水平和竖直方向上的二阶导数。
我们可以使用卷积运算来实现对图像的二阶微分:L(x,y) = ∑i,j(G(i,j) * f(x+i,y+j))其中,G(i,j)是拉普拉斯算子的离散化矩阵,f(x+i,y+j)是待处理图像在位置(x+i,y+j)的像素灰度值。
卷积运算的结果L(x,y)就是图像在位置(x,y)处的二阶微分。
得到图像的二阶微分之后,我们需要对其进行阈值处理。
一般来说,图像的二阶微分值越大,说明该位置的像素灰度值变化越明显,很有可能是边缘的位置。
因此,我们可以将所有二阶微分值大于一个设定的阈值的位置标记为边缘点。
然而,拉普拉斯边缘检测算法还存在一些问题。
首先,它对噪声比较敏感,因此在使用该算法时需要进行噪声抑制。
其次,拉普拉斯算子的离散化矩阵在处理图像时会引入锐化效果,这可能会导致图像中出现一些不必要的细节。
因此,在实际应用中,我们往往会使用其他算法和技术来对拉普拉斯边缘检测算法进行改进和优化。
拉普拉斯边缘检测算法是一种基于二阶微分的边缘检测算法。
它的基本思想是使用拉普拉斯算子对图像进行二阶微分,然后通过阈值处理来得到边缘。
图像处理中的边缘检测算法研究与性能评估

图像处理中的边缘检测算法研究与性能评估引言:在当今数字图像处理领域,边缘检测一直是一个重要且挑战性的问题。
边缘提取是图像处理中的一项基本操作,对于目标检测、图像分割和图像识别等任务都具有重要意义。
边缘检测的目标是找到图像中明显的灰度跃变区域,以准确地确定物体的边缘位置。
本文将介绍几种常见的图像处理中的边缘检测算法,并对其性能进行评估。
一、经典边缘检测算法1. Sobel算子Sobel算子是一种基于差分的边缘检测算子,它结合了图像梯度的信息。
Sobel算子使用一个3×3的模板对图像进行卷积操作,通过计算水平和垂直方向上的梯度来找到边缘位置。
Sobel算子虽然简单,但在边缘检测中表现良好。
2. Prewitt算子Prewitt算子是另一种基于差分的边缘检测算子,与Sobel 算子类似,它也使用一个3×3的模板对图像进行卷积操作。
该算子通过计算水平和垂直方向上的梯度来检测边缘。
Prewitt 算子在边缘检测中也有较好的性能。
3. Canny边缘检测Canny边缘检测是一种广泛应用的边缘检测算法。
与Sobel 和Prewitt算子相比,Canny算法不仅能够检测边缘,还能够进行边缘细化和抑制不必要的边缘响应。
它通过多阶段的边缘检测过程,包括高斯滤波、计算梯度幅值和方向、非极大值抑制和双阈值处理等步骤,来提取图像中的边缘。
二、边缘检测算法的性能评估1. 准确性评估准确性是评估边缘检测算法好坏的重要指标。
在进行准确性评估时,可以使用一些评价指标,如PR曲线、F值等。
PR 曲线是以检测到的边缘像素为横坐标,以正确的边缘像素为纵坐标绘制的曲线,用于评估算法的召回率和准确率。
F值则是召回率和准确率的综合评价指标,能够综合考虑算法的检测效果。
2. 实时性评估实时性是边缘检测算法是否适用于实际应用的重要因素。
在实时性评估时,可以考虑算法的运行时间,以及算法对硬件资源的要求。
边缘检测算法应尽量满足实时性的要求,并能够在不同硬件平台上高效运行。
sobel算子计算例题
sobel算子计算例题Sobel算子是一种常用的边缘检测算法,它能够通过计算图像中像素点的梯度来找到图像中的边缘。
本文将介绍一个使用Sobel算子计算边缘的例子,并拓展讨论Sobel算子的原理和应用。
假设我们有一幅灰度图像,我们想要找到图像中的水平边缘。
首先,我们需要将图像转化为灰度图像,这可以通过常见的方法如将RGB图像的三个通道取平均值来实现。
接下来,我们需要应用Sobel算子来计算每个像素点的梯度。
Sobel算子分为水平和垂直两个方向的算子,分别用于计算像素点在水平方向和垂直方向上的梯度。
在这个例子中,我们只关注水平边缘,所以我们只需要使用水平方向的Sobel算子。
水平方向的Sobel算子如下:```-1 0 1-2 0 2-1 0 1```我们需要将该算子与图像中的每个像素进行卷积运算。
卷积运算的过程是将算子与图像的局部区域进行元素级别的乘法,并将乘积相加,最后得到一个新的像素值。
这个新的像素值表示了该位置上的梯度大小。
我们可以使用以下公式来计算每个像素点的梯度:```Gx = (P1 * -1) + (P2 * 0) + (P3 * 1) +(P4 * -2) + (P5 * 0) + (P6 * 2) +(P7 * -1) + (P8 * 0) + (P9 * 1)```其中,P1到P9表示了图像中某个像素点周围的8个像素点。
计算完所有像素点的梯度之后,我们可以将梯度值进行阈值处理,以确定哪些像素点属于边缘。
一种简单的方法是将梯度值与一个预先设定的阈值进行比较,大于阈值的像素点被认为是边缘点,小于阈值的像素点被认为是非边缘点。
除了边缘检测之外,Sobel算子还可以用于图像的模糊处理、图像增强等。
在图像模糊处理中,我们可以通过计算图像的梯度来减少图像中的高频噪声,从而实现图像的平滑效果。
在图像增强中,我们可以通过增加图像的梯度来强化图像的边缘信息,使图像更加清晰。
总结而言,Sobel算子是一种常用的边缘检测算法,它可以通过计算图像中像素点的梯度来找到图像中的边缘。
sobel边缘检测算法代码python

sobel边缘检测算法代码python Sobel边缘检测算法是一种常用的数字图像处理方法,用于在图像中检测出边界。
其原理是利用图像灰度值的变化来确定图像边缘的位置。
Sobel算法是一种简单而有效的边缘检测算法,可以在Python中快速实现。
Sobel算法的本质可以视为一种滤波器。
它使用一组水平和垂直的像素值累加器,将卷积运算应用于图像中的像素。
该算法对像素值的变化率进行计算,就可以检测出物体的边缘。
通常,Sobel算法用于物体边缘和轮廓的识别,通过滤波器之后,灰度值大的像素就会变得更加亮,而灰度值低的像素则会变得更加暗。
Python中Sobel算法的实现相对简单,以下是一个基本步骤:1.导入必要库:opencv-python, numpy``` import cv2 import numpy as np ```2.读取图像文件并转换成灰度图``` img = cv2.imread('path/to/image',cv2.IMREAD_GRAYSCALE) ```3.应用Sobel算子:可以应用两个权重矩阵,分别代表水平和垂直方向的边缘变化。
可以使用OpenCV的cv2.Sobel()函数来进行计算,其中参数1代表应用的输入图像,参数2代表深度,通常值为-1,参数3和参数4代表权重矩阵。
``` sobelHorizontal = cv2.Sobel(img,cv2.CV_64F, 1, 0) ``` ``` sobelVertical =cv2.Sobel(img, cv2.CV_64F, 0, 1) ```4.以合适的形式呈现边缘图像:边缘检测图像通常需要处理掉噪声,并调整颜色和对比度。
这一步骤有多种方式实现,例如使用cv2.convertScaleAbs()函数将数据类型转换为8位无符号整数,并将其转换为灰度格式的边缘图像。
``` magnitudeImage =cv2.convertScaleAbs(np.sqrt(np.power(sobelHorizonta l, 2) + np.power(sobelVertical, 2))) ```以上是一个基本的代码实现,可以生成一张带有高亮边缘的图像。
图像边缘检测原理及方法
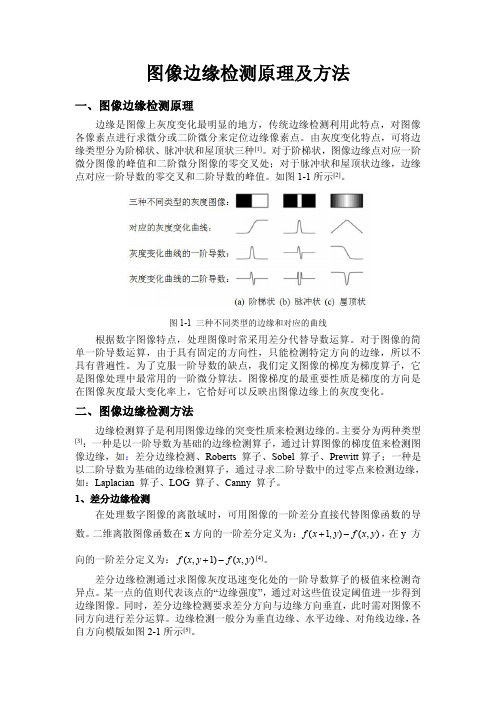
1、差分边缘检测 在处理数字图像的离散域时,可用图像的一阶差分直接代替图像函数的导 数。 二维离散图像函数在 x 方向的一阶差分定义为: f ( x 1, y ) f ( x, y ) , 在y 方 向的一阶差分定义为: f ( x, y 1) f ( x, y ) [4]。 差分边缘检测通过求图像灰度迅速变化处的一阶导数算子的极值来检测奇 异点。某一点的值则代表该点的“边缘强度”,通过对这些值设定阈值进一步得到 边缘图像。同时,差分边缘检测要求差分方向与边缘方向垂直,此时需对图像不 同方向进行差分运算。边缘检测一般分为垂直边缘、水平边缘、对角线边缘, 各 [5] 自方向模版如图 2-1 所示 。
二、图像边缘检测方法
边缘检测算子是利用图像边缘的突变性质来检测边缘的。 主要分为两种类型 :一种是以一阶导数为基础的边缘检测算子,通过计算图像的梯度值来检测图 像边缘,如:差分边缘检测、Roberts 算子、Sobel 算子、Prewitt 算子;一种是 以二阶导数为基础的边缘检测算子,通过寻求二阶导数中的过零点来检测边缘, 如:Laplacian 算子、LOG 算子、Canny 算子。
2 f ( x, y )
2 f ( x, y ) 2 f ( x, y ) x 2 y 2
(2-10)
使用差分方程对x 和y 方向上的二阶偏导数近似如下。
2 f Gx ( f (i, j 1) f (i, j )) f (i, j 1) f (i, j ) x 2 x x x x f (i, j 2) 2 f (i, j 1) f (i, j )
s x { f ( x 1, y 1) 2 f ( x 1, y ) f ( x 1, y 1)} { f ( x 1, y 1) 2 f ( x 1, y ) f ( x 1, y 1)} s y { f ( x 1, y 1) 2 f ( x, y 1) f ( x 1, y 1)} { f ( x 1, y 1) 2 f ( x, y 1) f ( x 1, y 1)}
边缘检测的原理
边缘检测的原理
边缘检测是一种图像处理技术,它的原理是通过分析和识别图像中颜色、灰度或纹理的突变部分,提取出图像中物体轮廓的技术。
边缘检测的基本原理是基于图像的梯度变化。
在一幅图像中,物体的边缘往往表现为像素灰度值的变化。
利用这种像素灰度值的变化可以找到图像中的边缘。
常用的边缘检测算法包括Sobel算子、Prewitt算子和Canny算子。
Sobel算子是一种基于图像灰度梯度的边缘检测算法。
它将图像中每个像素的灰度值与其周围像素的灰度值进行卷积运算,得到图像的梯度值。
通过设置阈值来提取出图像中的边缘。
Prewitt算子是一种类似于Sobel算子的边缘检测算法。
它也是通过对图像中的每个像素进行卷积运算来计算梯度值,然后通过设定阈值来提取边缘。
Canny算子是一种比较高级的边缘检测算法,它结合了图像梯度和非极大值抑制技术。
对图像中每个像素进行梯度计算,并在梯度最大值处绘制边缘。
然后利用阈值来筛选出符合条件的边缘。
边缘检测在计算机视觉、图像处理等领域都有广泛的应用。
通
过边缘检测,可以提取图像中的特征信息,例如物体的轮廓、边界等,从而实现目标检测、图像分割、图像修复等任务。
log边缘检测算法
log边缘检测算法
log算法(Laplacian of Gaussian)是一种常用的边缘检测算法,它是通过计算图像各个像素点周围像素的差异,来提取出图像中的边缘。
具体的log边缘检测算法步骤如下:
1. 首先,将输入图像转化为灰度图像,以便进行后续的计算。
2. 对灰度图像进行高斯滤波,以消除噪声的影响。
高斯滤波可以使用一维或二维高斯卷积核进行实现。
3. 对经过高斯滤波后的图像进行拉普拉斯运算,得到图像的二阶导数。
拉普拉斯运算可以通过使用一种二阶差分算子来实现,常见的有4邻域拉普拉斯算子和8邻域拉普拉斯算子。
4. 对二阶导数图像进行阈值处理,将边缘像素提取出来。
一般可以采用全局阈值或自适应阈值的方式进行处理。
5. 对提取出的边缘像素进行连接和细化处理,去除不必要的噪声点和断点。
log边缘检测算法具有一定的局限性,如对噪声比较敏感,需
要进行高斯滤波预处理;边缘检测结果可能会有边缘连接不完整、存在断点等问题。
因此,在实际应用中,可能需要结合其他边缘检测算法进行优化和改进。
sobel边缘检测算法
sobel边缘检测算法Sobel边缘检测算法是一种能够检测边缘的数字图像处理算法,它是一种简化的滤波器,通过算子(kernel)去捕捉图像中的边缘特征。
它把图像中各个像素点衍生出强度值,以此来确定图像中边缘特征的位置。
Sobel算法经常被应用于机器视觉,激光成像和小波变换等图像处理领域,广泛地被计算机机器视觉和数字图像处理系统使用。
基本原理Sobel边缘检测使用的是对比度检测的三个步骤:灰度变换、滤波和考虑两个方向的梯度变换。
在灰度变换步骤中,图像会被转变为灰度图像,这样就可以只考虑图像像素的亮度值而忽略其它特性,以便进行后续计算。
滤波步骤中,为了减少噪声对图像的影响,通常会使用高斯滤波器实现对图像的平滑处理。
最后的梯度变换步骤通常会使用Sobel算子(kernel)去计算图像的梯度值,可以通过梯度值,把图像像素分成边缘像素、非边缘像素等,从而检测出图像中的边缘特征。
Sobel算子Sobel算子是一种简单的滤波器,它是一种求图像像素对梯度值的滤波。
从技术上讲,它是通过计算梯度值或者其他梯度相关滤波器来检测图像边缘的。
其原理是:将灰度图像求其X,Y方向的梯度,根据梯度大小和方向,即可判断像素点的变化情况。
Sobel算子又称为Sobel滤波器,它的滤波器是由一个3X3大小的算子构成,核心实现思想是卷积运算,将该算子(kernel)用于每个像素点,求出该像素点的梯度,当梯度值越大时,把该像素点标记为边缘像素点,进而可以确定图像中边缘特征的位置和方向。
在具体的Sobel算子操作中,为了求出梯度值,首先在每个像素点处,需要对每个像素点及其周围8个点进行卷积乘积,乘积结果分别作为X和Y方向的梯度值。
卷积的结果则可以确定图像中边缘特征的位置和方向。
应用Sobel边缘检测算法有许多应用:它可以用来识别和提取图像中的特征,用来检测图像的边缘和轮廓,还可以用来做数据分析和机器学习衍生的技术,如视觉惯性导航系统(VINS),图像拼接和图像分割等。
基于重心的一种灰度图像边缘检测算法
A b ta t sr c :
An ag rt loi hm fe g ee t n o ry c l ma e b s d o h e tro r v t s i to u e i o d e d t ci fg a s a e i g a e n t e c ne fg a iy i n r d c d i t s o n h pa e. Th g a s ae au o a h ie i s e d s h e ‘ u lt’ r h e c o d ae o pr e r y c l v l e f e c px l s e me a t ‘ ai ’o t z o r i t s f q y n t r ed e so a p c eg a c l a e W h te i li o nd r o to o ,i e n i g h e - i n i n l a ei t r y s ae i g . m s n h m e rapxe sab u ay p i rn t sd pe d h n n
1 引言
数字图像 的边缘 检测一直是 图像处理技术 中重要
的研究领域之一。,判断该像素是否图像 的边缘 点。 本文第二部分介绍算 法的原理及分 析 ,第三部分
给 出实验结果 ,最后是全文总结 。
化 对人的视觉而言 , 就是边缘 。图像边缘有两种属性 :
a ta l nt eB— l a o n g . cu l o h u t s u d i y r ma e
K e w o d : e g eet n c ne f rvt; f e; ut su d ga c l g y r s d e tci ; e tr ga i o stB-l ao n ; rysaei d o o y r ma e
图像处理中的边缘检测与图像增强技术
图像处理中的边缘检测与图像增强技术边缘检测是图像处理领域中的重要技术,它主要用于提取图像中的边缘信息,帮助我们分析和理解图像。
图像增强则是通过改变图像的亮度、对比度等参数,使得图像更加明亮和清晰。
本文将介绍边缘检测和图像增强的原理、常用算法和应用领域。
一、边缘检测技术边缘是图像中灰度变化比较大的区域,通常表示物体边界或者纹理的边界。
边缘检测的目标是在图像中找到这些边缘,并将其提取出来。
常见的边缘检测算法有Sobel算子、Prewitt算子、Roberts算子和Canny算子。
1. Sobel算子Sobel算子是一种最简单和最常用的边缘检测算法之一。
它通过在图像中进行卷积运算,通过计算像素点与其邻域像素点之间的差异来作为边缘的强度。
Sobel算子有水平和垂直两个方向的算子,通过计算两个方向上的差异来得到最终的边缘值。
2. Prewitt算子Prewitt算子也是一种常用的边缘检测算法,它与Sobel算子类似,也是通过计算像素点与其邻域像素点之间的差异来作为边缘的强度。
不同之处在于Prewitt算子使用了不同的卷积核,其结果可能会略有差异。
3. Roberts算子Roberts算子是一种简单的边缘检测算法,它使用了一个2x2的卷积核。
通过计算相邻像素点之间的差异,Roberts算子可以提取图像中的边缘信息。
然而,Roberts算子相对于其他算法来说,其结果可能会较为粗糙。
4. Canny算子Canny算子是一种边缘检测的经典算法,由于其较好的性能和效果,被广泛应用于边缘检测领域。
Canny算子主要包括以下几步:首先,对图像进行高斯滤波,以平滑图像;其次,计算图像的梯度和边缘方向;然后,通过非极大值抑制去除不是边缘的像素;最后,通过双阈值算法将边缘连接为一条连续的线。
二、图像增强技术图像增强是指通过改变图像的亮度、对比度等参数,使得图像更加明亮和清晰。
图像增强可以提高图像的质量,使得图像更适合用于后续的分析和处理。
sobel边缘检测算法的用法

sobel边缘检测算法的用法
Sobel边缘检测算法是一种常用的图像处理算法,用于检测图像中的边缘。
它基于图像中像素灰度值的梯度变化来识别边缘。
下面是使用Sobel边缘检测算法的一般步骤:
1.将彩色图像转换为灰度图像:首先,将输入的彩色图像转换为灰度图像。
这可以通过将RGB三个通道的像素值加权平均得到,或者使用其他方法进行灰度化。
2.计算水平和垂直梯度:对灰度图像应用Sobel算子,计算每个像素点的水平和垂直方向上的梯度。
Sobel算子是一个3x3的卷积核,分别对应水平和垂直方向上的梯度计算。
3.计算梯度幅值和方向:根据水平和垂直方向上的梯度计算出每个像素点的梯度幅值和梯度方向。
梯度幅值代表了边缘的强度,而梯度方向表示了边缘的方向。
4.应用阈值处理:根据设定的阈值,将梯度幅值进行二值化处理,以便检测出明显的边缘。
通常,高于高阈值的像素点被认为是边缘,低于低阈值的像素点被认为是非边缘,而介于两个阈值之间的像素点可以根据实际需求进行处理。
5.边缘连接:在二值化后的图像中,将相邻的边缘像素连接起来形成连续的边缘线条。
这可以通过应用一些连接算法,如霍夫变换或者基于邻域关系的像素连接方法来实现。
Sobel边缘检测算法可以帮助我们提取出图像中的边缘信息,常用于计算机视觉、图像处理和模式识别等领域。
图像处理中的边缘检测技术使用方法

图像处理中的边缘检测技术使用方法图像处理是一种对图像进行数字化处理的技术,它可以改善图像的质量、增强图像的细节、提取图像中的特征等。
在图像处理的过程中,边缘检测是一项非常重要的任务。
边缘检测技术可以帮助我们找到图像中不同物体的边界,从而更好地理解图像内容。
本文将介绍图像处理中常用的边缘检测技术以及它们的使用方法。
1. Sobel算子Sobel算子是一种经典的边缘检测算法,常用于分析图像的梯度变化。
使用Sobel算子进行边缘检测的步骤如下:a. 将原始图像转化为灰度图像。
b. 对灰度图像进行高斯平滑以降低噪声。
c. 在水平和垂直方向上应用Sobel算子。
d. 计算两个方向上的梯度幅值。
e. 根据梯度幅值进行阈值处理,在超过阈值的点上标记为边缘点。
2. Canny边缘检测Canny边缘检测是一种基于多级阈值的边缘检测方法,被广泛应用于物体识别和图像分析领域。
使用Canny边缘检测的步骤如下:a. 将原始图像转化为灰度图像。
b. 对灰度图像进行高斯平滑以降低噪声。
c. 计算图像的梯度和方向。
d. 应用非极大值抑制,以保留梯度方向上的局部极大值。
e. 应用双阈值处理,将边缘点分为强边缘、弱边缘和非边缘点。
f. 根据连接性将强边缘与与之相邻的弱边缘连接起来,形成完整的边缘。
3. Laplacian算子Laplacian算子是一种基于图像二阶微分的边缘检测算法,它通过检测图像中的强度变化来找到边缘。
使用Laplacian算子进行边缘检测的步骤如下:a. 将原始图像转化为灰度图像。
b. 对灰度图像进行高斯平滑以降低噪声。
c. 应用Laplacian算子对图像进行二阶微分。
d. 计算二阶微分结果的绝对值,并进行阈值处理来检测边缘。
4. Roberts算子Roberts算子是一种基于图像一阶微分的边缘检测算法,它通过计算像素邻域内的灰度差异来确定图像中的边缘。
使用Roberts算子进行边缘检测的步骤如下:a. 将原始图像转化为灰度图像。
实验二、灰度图像边缘检测
实验二、灰度图像边缘检测一、实验目的1.掌握各种边缘检测算子的概念及原理。
2.掌握各种边缘检测算子的算法。
3.掌握各种边缘检测算子matlab实现的编制方法。
4.启发学生依据边缘特征进行图像分析与识别,提高学生图像处理与分析能力和实际动手能力。
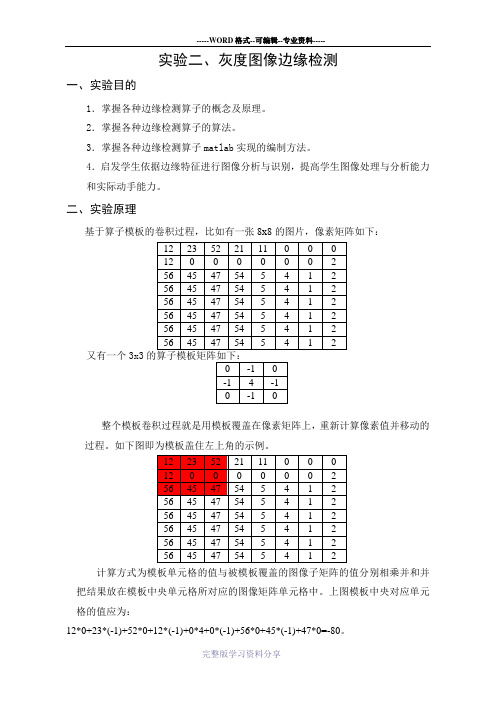
二、实验原理基于算子模板的卷积过程,比如有一张8x8的图片,像素矩阵如下:又有一个3x3整个模板卷积过程就是用模板覆盖在像素矩阵上,重新计算像素值并移动的过程。
如下图即为模板盖住左上角的示例。
计算方式为模板单元格的值与被模板覆盖的图像子矩阵的值分别相乘并和并把结果放在模板中央单元格所对应的图像矩阵单元格中。
上图模板中央对应单元格的值应为:12*0+23*(-1)+52*0+12*(-1)+0*4+0*(-1)+56*0+45*(-1)+47*0=-80。
各算子模板如下:1. Roberts 算子10010110⎡⎤⎡⎤⎢⎥⎢⎥--⎣⎦⎣⎦ 2. 拉普拉斯边缘算子010111141181010111⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦ 3. Kirsch 边缘算子33535555555330530530350333533333333304590135----⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-----⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-----------⎣⎦⎣⎦⎣⎦⎣⎦︒︒︒︒ 533333333333503503303305533553555355180225270315-----------⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-----⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦⎣⎦⎣⎦︒︒︒︒4. 高斯-拉普拉斯算子-2-4-4-4-2-4080-4-48248-4-4080-4-2-4-4-4-2⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦5. Prewitt 边缘算子101111101000101111----⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦6. Sobel 算子三、实验仪器和设备PC机1台,原始灰度图像文件,matlab编程软件四、预习要求1.复习matlab编程软件的使用方法;2.复习数字图像处理的一些相关知识;3.复习数字图像边缘检测的基本原理;4.学习在matlab中如何进行图像的边缘检测。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿 日期 : 2 0 1 2 - 0 5 - 1 5
定义二维数组 P i x e l s [ ] [ ] , 用于存放从原始图
基金项 目: 国家 自然科学基金( 1 0 7 7 1 0 9 1 ) 作者简 介: 孙 亮( 1 9 8 7 一 ) , 男, 湖北天 门人 , 硕士生 , 主要研究方 向为智能优化算法及应用. E — ma i l : l i a n g s l l @1 2 6 . c o m
幅 图像 的大部分 信息 , 它 反 映 了 图像 中一 个物 体
区别 于其 他 物 体最 基 本 的特征 [ 1 ] . 所谓 边 缘 是 指其
周围像素灰度值有 明显变化 ( 阶跃变化或屋顶变化) 的那 些像 素 的集合 . 边 缘广 泛 存 在 于 目标 与 背 景之
间、 目标 与 目标之 间 、 区域 与 区域 、 基 元 与基元 之 间. 边 缘 检测 是 基 于 边界 的图像 分 割 方 法 , 是 采用 某 种算 法来 提取 出 图像 中对 象 与 背 景 问 的交 界 线 . 边 缘检 测是 实 际中许 多 图像 处理 应用 的基 础 , 目前 , 数 字 图像边 缘检 测 技术 广 泛 应 用 于 图像分 割 、 运 动 检测、 目标 跟踪 、 人 脸 识 别 等 领域 [ 2 ] , 因此研 究 图像 边 缘检 测 与提取方 法 具有 重要 的理论 意 义和现 实 意
第3 2 卷 第 1 期 2 0 1 3年 2月
文章编号 : 1 0 0 1 - 4 3 7 3 ( 2 0 1 3 ) 0 1 - 0 1 1 1 — 0 5
兰
州
交
通
大
学
学
报
Vo 1 . 3 2 No . 1
F e b . 2 0 1 3
J o u r n a l o f L a n z h o u J i a o t o n g Un i v e r s i t y
是一种 简单 、 有效的边缘检 测算 法.
关键词 : 边缘 检 测 ; 灰 度 值 平 均值 求 差 ; 阈值 选 取 中 图分 类 号 : T P 3 0 1 . 6 文献标志码 : A
边缘 是 图像 的最 重 要 的特 征 之 一 , 往 往 携带 着
一
根据 像素 点及 其八 领 域 像 素 点 的灰 度 值 , 提 出 了一 种基 于在 邻域 内平 行方 向上像 素点 灰 度值平 均值 求 差 的边缘 检测 算法 .
义.
1 平均值 求差 模 板边 缘检 测算 法 的分 析 与
设 计
1 . 1 标 记疑 似边 缘点
灰度 图像 ( 每像 素所 占位数 为 8 ) 和彩色 图像
( 每像 素 所 占位 数 为 2 4 ) 是 数 字 图像 处 理 中最 常 用 到 的类 型 , 本 文这 里 提 出 的边 缘 检 测 仅针 对 灰 度 图 像. 由于对边 缘点 的判 断要 用到输 人 图像像 素点 的 灰度 值 , 而算 法 中又涉及 到对 像素 点灰 度值 的改 变 , 所 以必须 重新 申请 输 出 图像 的缓 冲 区 , 而不 能 直 接 在输 入 图像 中对像 素点 的灰 度值进 行修 改. 考 虑像 素 点 及处 在 其八 邻 域 的相邻 像 素 点 , 即 上、 下、 左、 右、 左上 、 右上 、 右下、 左 下 的 8个 相 邻像
传 统 的 图像 边缘 检测是 利 用 图像 一 阶导数 的极 值 或二 阶导 数 的过 零 点信 息来 提供 判 断边缘点 的依 据[ 3 ] . 利 用 一 阶 微 分 的算 子 有 R o b e r t s 、 S o b e l 、 P r e - wi t t 、 Ki r s e h , 利 用二 阶微 分 的算 子有 L a p l a c e 、 I 0 G 等. 近些 年 人们将 模糊 理论 、 统计 分 析 、 小波变 换 、 数 学 形态 学 , 神经 网络 、 遗传 算 法 、 曲 面拟 合 等 与 边缘
检 测联 系起 来 , 提 出了许 多新 的边缘 检 测算法 .
素点. 做如下处理 : 将所有待检测的图像都看作图,
所有 像素 点 就对应 于 图 中的各 个 顶 点 , 像 素 点 及其 八邻 域 的相邻 像素 点可 以看 作每个 顶点 都 与周 围的 邻点 存在 八条 关联 边 , 每条 关 联 边 的权 值 这 里 定 义 成该 边 关 联 的这 两个 像 素 点 的 灰度 值 之 差 , 如图 1 所示 . 这 样就将 一 幅 图像 与 一 带权 无 向 图进 行 了映 射.
D OI : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1 — 4 3 7 3 . 2 0 1 3 . O 1 . 0 2 5 Nhomakorabea一
种 简 单 的灰 度 图像 边 缘 检 测 算 法
孙 亮 , 李敬文
7 3 0 0 7 0 )
( 兰州交通大学 电子与信息工程学院 , 甘肃 兰州
摘
要: 提 出了一种新的基 于平行方 向上像素 点灰度值 平均值 求差 的边缘检 测算 法. 根据像 素 点及其八 邻域 的灰
度值 , 在尽 量保证 图像信 息完整的基础上 , 选择合 适的阈值提取 出尽可能合适数 量的边缘点 , 并利 用边缘 的连 续性
原理对 结果 中的噪声 点进行 筛选, 以达到边缘提取 的 目的, 提 高图像边缘 检测 效果. 实验表 明 : 此算法对 灰度 图像
边 缘检 测存 在 着检测 精度 和边 缘定 位精 度 以及 抗 噪声 等 方面 的矛盾 [ 4 ] , C a n n y在 1 9 8 6年 提 出 了边 缘 检测 的三个标 准 [ 5 ] : 好 的检测 结果 , 好 的边缘 定 位
和单边缘响应. 研究 的难点就在于如何保证较高的 检测 精确 度 , 同时又 要 尽 量 减低 噪 声对 检 测 结 果 的