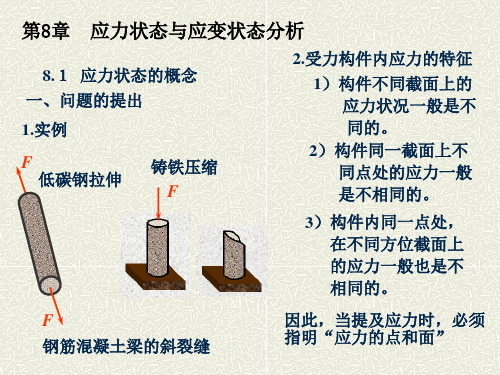
材料力学(I)第8章
合集下载
材料力学:第八章-应力应变状态分析
Ds x ,t x , E s y ,t y
t
C OE
s 2 , 0
s 1 , 0
D
C
sO
E
s 2 , 0
s 1 , 0
D
s
结论:所画圆确为所求应力圆
应力圆的绘制与应用4
应力圆的绘制
已知 sx , tx , sy ,
画相应应力圆
先确定D, E两点位置, 过此二点画圆即为应力圆
Ds x ,t x , E s y ,t y
证: 1. 据纯剪切斜截面应变公式求e45。
2. 据广义胡克定律求 e45。
纯剪切时主应力在45度方向,
3. 比较
例 8-3 边长 a =10 mm 正方形钢块,置槽形刚体内, F = 8 kN,
m 0.3,求钢块的主应力
解:
因二者均为压应力, 故
§8 电测应力与应变花
应力分析电测方法 应变花
已知 sa , ta , sa+90 , ta +90 ,画应力圆
应力圆绘制 先确定D, E两点位置, 过此二点画圆即为应力圆
ta+90 sa+90
t
sa ,ta
D
t
sa ,ta
D
sa
ta
O
C
sO
E
sa+90 ,ta+90
C
s
E
sa+90 ,ta+90
应力圆的绘制方法(3): 由主应力画应力圆
适用范围: 各向同性材料,线弹性范围内
主应力与主应变的关系
主应变与主应力的方位重合 最大、最小主应变分别发生在最大、最小主应力方位
最大拉应变发生在最大拉应力方位 如果 s1 0,且因 m < 1/2,则
t
C OE
s 2 , 0
s 1 , 0
D
C
sO
E
s 2 , 0
s 1 , 0
D
s
结论:所画圆确为所求应力圆
应力圆的绘制与应用4
应力圆的绘制
已知 sx , tx , sy ,
画相应应力圆
先确定D, E两点位置, 过此二点画圆即为应力圆
Ds x ,t x , E s y ,t y
证: 1. 据纯剪切斜截面应变公式求e45。
2. 据广义胡克定律求 e45。
纯剪切时主应力在45度方向,
3. 比较
例 8-3 边长 a =10 mm 正方形钢块,置槽形刚体内, F = 8 kN,
m 0.3,求钢块的主应力
解:
因二者均为压应力, 故
§8 电测应力与应变花
应力分析电测方法 应变花
已知 sa , ta , sa+90 , ta +90 ,画应力圆
应力圆绘制 先确定D, E两点位置, 过此二点画圆即为应力圆
ta+90 sa+90
t
sa ,ta
D
t
sa ,ta
D
sa
ta
O
C
sO
E
sa+90 ,ta+90
C
s
E
sa+90 ,ta+90
应力圆的绘制方法(3): 由主应力画应力圆
适用范围: 各向同性材料,线弹性范围内
主应力与主应变的关系
主应变与主应力的方位重合 最大、最小主应变分别发生在最大、最小主应力方位
最大拉应变发生在最大拉应力方位 如果 s1 0,且因 m < 1/2,则
材料力学(I)第八章-铆钉连接的计算
第 8 章 组合变形及连接部分的计算
§8-6 铆钉连接的计算
1
铆钉连接主要有三种方式: 1.搭接(图a),铆钉受单剪; 2.单盖板对接(图b),铆钉受单剪; 3.双盖板对接(图c),铆钉受双剪。
2
铆钉组承受横向荷载
实际铆钉组中位于 两端的铆钉所传递的力 要比中间的铆钉所传递 的力大。
为了简化计算,假设: (1) 如果作用于连接上的力其作用线通过铆钉组 中所有铆钉横截面的形心,而且各铆钉的材料和直径 均相同,则认为每个铆钉传递相等的力。 (2) 不考虑弯曲的影响。 铆钉连接与螺栓连接的计算方法相同。
i 1
2.754 103 N 2.754 kN
22
例题 8-10
F F
'' 2 '' 5
M e r2
2 r i i 1 6
2.928kN
F F
'' 3 '' 4
M e r3
2 r i i 1 6
4.344kN
Fi 的方向垂直于ri。
23
例题 8-10
将Fi'和Fi''按矢量合成以得出每一铆钉所受的力 Fi。图b中示出了1,2,3三个铆钉所受力的情况。 经比较按矢量合成后的力F1,F2,…,F6 知,铆钉 1和6所受力最大,F1=F6=4.41 kN。
24
例题 8-10
5. 此连接为搭接,铆钉受单剪,故受力最大的铆 钉1和6剪切面上的切应力为
F1 4.41 103 N 6 t1 t 6 14 10 Pa 14 MPa A s1 π (0.02 m)2 4
257
例题 8-10
解: 1. 将外力F向铆
§8-6 铆钉连接的计算
1
铆钉连接主要有三种方式: 1.搭接(图a),铆钉受单剪; 2.单盖板对接(图b),铆钉受单剪; 3.双盖板对接(图c),铆钉受双剪。
2
铆钉组承受横向荷载
实际铆钉组中位于 两端的铆钉所传递的力 要比中间的铆钉所传递 的力大。
为了简化计算,假设: (1) 如果作用于连接上的力其作用线通过铆钉组 中所有铆钉横截面的形心,而且各铆钉的材料和直径 均相同,则认为每个铆钉传递相等的力。 (2) 不考虑弯曲的影响。 铆钉连接与螺栓连接的计算方法相同。
i 1
2.754 103 N 2.754 kN
22
例题 8-10
F F
'' 2 '' 5
M e r2
2 r i i 1 6
2.928kN
F F
'' 3 '' 4
M e r3
2 r i i 1 6
4.344kN
Fi 的方向垂直于ri。
23
例题 8-10
将Fi'和Fi''按矢量合成以得出每一铆钉所受的力 Fi。图b中示出了1,2,3三个铆钉所受力的情况。 经比较按矢量合成后的力F1,F2,…,F6 知,铆钉 1和6所受力最大,F1=F6=4.41 kN。
24
例题 8-10
5. 此连接为搭接,铆钉受单剪,故受力最大的铆 钉1和6剪切面上的切应力为
F1 4.41 103 N 6 t1 t 6 14 10 Pa 14 MPa A s1 π (0.02 m)2 4
257
例题 8-10
解: 1. 将外力F向铆
《材料力学》课程讲解课件第八章组合变形
强度条件(简单应力状态)——
max
对有棱角的截面,最大的正应力发生在棱角点处,且处于单向应力状态。
max
N A
M zmax Wz
M ymax Wy
x
对于无棱角的截面如何进行强度计算——
1、确定中性轴的位置;
y
F z
M z F ey M y F ez
ez F ey z
y
zk yk z
y
x
1、荷载的分解
F
Fy F cos
Fz F sin
z
2、任意横截面任意点的“σ”
x
F
y
(1)内力: M z (x) Fy x F cos x
M y (x) Fz x F sin x
(2)应力:
Mz k
M z yk Iz
My k
M y zk Iy
(应力的 “+”、“-” 由变形判断)
F
1, 首先将斜弯曲分解
为两个平面弯曲的叠加 Fy F cos
z
L2
L2
Fz F sin
z
2, 确定两个平面弯曲的最大弯矩
y
Mz
Fy L 4
M
y
Fz L 4
3, 计算最大正应力并校核强度
max
My Wy
Mz Wz
217.8MPa
查表: Wy 692.2cm3
4, 讨论 0
y
Wz 70.758cm3
的直径为d3,用第四强度理论设计的直径为d4,则d3 ___=__ d4。
(填“>”、“<”或“=”)
因受拉弯组合变形的杆件,危险点上只有正应力,而无切应力,
r3 1 3 2 4 2
r4
材料力学第8章应力状态分析

点。设想以A点为中心,用相互垂直的6个截面截取一个边长无限小的立方
体,我们将这样的立方体称为单元体。取决于截取平面的倾角变化,围绕同 一个点,可以截取出无数个不同的单元体,
图8.1(b)为依附着杆件横截面所截取单元体(图8.1(c)为其平面图形式),而 图8.1(d)为依附着45°斜截面所截取的单元体。由于杆件轴向拉伸时,横 截面上只有正应力,且与杆件轴向平行的截面没有应力,因此,图8.1(b) 中的单元体只在左右两个面上有正应力作用。对于图8.1(d)中的单元体, 根据拉压杆斜截面应力分析(2.3节)可知,其4个面上既有正应力又有切应 力。
又有切应力。围绕A,B,C三点截取单元体如图8.2(d)所示,单元体的前后
两面为平行于轴线的纵向截面,在这些面上没有应力,左右两面为横截面的 一部分,根据切应力互等定理,单元体B和C的上下两面有与横截面数值相等
的切应力。至此,单元体各面上的应力均已确定。注意到图8.2(d)各单元
体前后面上均无应力,因此也可用其平面视图表示(见图8.2(e))。
图8.2
从受力构件中截取各面应力已知的单元体后,运用截面法和静力平衡条件, 可求出单元体任一斜截面上的应力,从而可以确定出极值应力。
围绕构件内一点若从不同方向取单元体,则各个截面的应力也各不相同。其
中切应力为零的截面具有特殊的意义,称为主平面;主平面上的正应力称为 主应力。一般情况下,过构件内任一点总能找到3个互相垂直的主平面,因
图8.3
运用截面法可以求出与 z 截面垂直的任意斜截面 ac 上的应力(见图 8.3
( a ))。设斜截面 ac 的外法线 n 与 x 轴的夹角为 α (斜截面 ac 称 为 α 截面),并规定从 x 轴正向逆时针转到斜截面外法线 n 时 α 角为正
材料力学第8章-能量法3-1
d
FN dx d(l) = EA
0 N
Mdx d EI
0
Tdx d GI p
0 S 0
1 F d l M d F d T d
F FN T T M M dx dx dx EA EI GI p
0 N 0 0
2.力和位移应理解为广义力和广义位移。
能量法/虚功原理 单位力法 图乘法
上节回顾
1、可能内力,可能位移,虚位移 2、虚功原理
在外力作用下处于平衡的结构,任意给它一个虚位移, 则外力在虚位移上所做的虚功,等于结构内力在虚变形上所 作的功。
W Wi
* e
e
*
外力虚功
内力虚功
l
W
Fi
5 M a 3
0 1c
2 Fa a
M
0 2c
3 a 2
Fa a 3 2 2 0 M 3c a 3
能量法/虚功原理 单位力法 图乘法
A
EI1
a
C
EI 2
a
F B
1
2Fa Fa
1
2a 5a/3
2
3a/2
-
2a/3
3
根据图乘法,自由端的挠度为:
1 1 0 0 yB 1M1c 2 M 2c EI 3M 30c EI1 2 1 Fa a 5 3 1 Fa a 2a a Fa a a EI1 2 3 2 EI 2 2 3
能量法/超静定问题 力法 例 如图超静定梁, EI为常数,试求B点的约束反力。
第八章
一、杆件的应变能
材料力学第八章组合变形

例题: 图示吊车大梁,由32a热轧普通工字钢制成,许 用应力 [σ]=160MPa ,L=4m 。起吊的重物重量F =80kN,且作用在梁的中点,作用线与y轴之间的夹角α =5°,试校核吊车大梁的强度是否安全。
F
Fy F cos 50
L2
L2
解:1. 外力分解
Fy F cos 80 cos 50 79.7kN Fz F sin 80 sin 50 6.96kN
材料力学
Mechanics of Materials
例:图示梁,已知F1=800N,F2=1650N,截面宽度 b=90mm,高度h=180mm。求:
1、梁上的max及所在位置; 2、若改为a=130mm的正方形截面,梁上的max; 3、若改为d=130mm圆形截面,梁上的max。
F2
F1 z
32
32 6
d3
72.6mm
取 d 73mm
构件在荷载的作用 下如发生两种或两种以 上基本形式的变形,且 几种变形所对应的应力 (和变形)属于同一数 量级,则构件的变形称 为组合变形。
❖组合变形的分析方法 线弹性小变形范围内,采用叠加原理
材料力学
Mechanics of Materials
二.组合变形分析方法 条件:线弹性小变形
组合 变形
0.642q 106 31.5 103
0.266q 106 237 103
160MPa
q 7.44kN / m
材料力学
Mechanics of Materials
M zD 0.456q
M zA 0.266q
z
M yD 0.444q
M yA 0.642q
A截面
y
max
材料力学课件第8章组合变形zym
§8—4 扭转与弯曲的组合 一、圆截面杆弯扭组合 实例: (一)实例: 已知:塑性材料轴尺寸,传动力偶Me。 已知:塑性材料轴尺寸,传动力偶 。 试建立轴的强度条件。 试建立轴的强度条件。 解: 1、确定危险点: 、确定危险点: (1)外力分析 ) F 计算简图: ①计算简图: Fτ 由 ∑ M x = 0 得: FD = Me 2 可确定F 由F可确定 τ。 可确定 外力分解: ②外力分解: 变形判断: ③变形判断: AB段扭转变形,BE段弯扭组合变 段扭转变形, 段弯扭组合变 段扭转变形 形,EC段弯曲变形。 段弯曲变形。 段弯曲变形
解: 、确定各边为中性轴时的压力作用点: 1、确定各边为中性轴时的压力作用点: b2 h2 2 iy = , iz2 = 12 12 h az = ∞ AB截距: a y = − , 截距: 截距 2 h2 iz2 12 = h , zF = 0 F作用点 坐标: yF = − = − 作用点a坐标 作用点 坐标: h 6 ay − 2 同样确定b,c,d点。 同样确定 点 2、连线 确定截面核心。 、连线a,b,c,d确定截面核心。 确定截面核心 解:
3 由: W ≥ M max = 12 ×10 N ⋅ m 6
[σ ]
100 × 10 Pa
= 12 × 10−5 m3 = 120cm3
查表选定16号工字钢。 查表选定 号工字钢。 号工字钢 (2)组合变形校核计算: )组合变形校核计算: 16号工字钢:W=141cm3,A=26.1cm3 号工字钢: 号工字钢
2、应力状态分析 、 均为单向应力状态 单向应力状态。 均为单向应力状态。
'' σ A = σ ′ +σ A =
F (0.425m) F × (0.075m) + −3 2 15 ×10 m 5310 ×10−8 m 4
材料力学-第8章应力状态与强度理论
第8章 应力状态与强度理论及其工程应用
强度理论概述
关于脆性断裂的强度理论
第8章 应力状态与强度理论及其工程应用
关于脆性断裂的强度理论
零件或构件在载荷作用下,没有明显的破坏 前兆(例如明显的塑性变形)而发生突然破坏的 现 象 , 称 为 断 裂 失 效 ( failure by fracture or rupture)。
Mechanics of materials
材料力学
材料力学
第 8章
基础篇之八
应力状态与强度理论 及其工程应用(B)
第8章 应力状态与强度理论及其工程应用
什么是“失效”;怎样从众多的失效现象中寻找失效 规律;假设失效的共同原因,从而利用简单拉伸实验结果, 建立一般应力状态的失效判据,以及相应的设计准则,以 保证所设计的工程构件或工程结构不发生失效,并且具有 一定的安全裕度。这些就是本章将要涉及的主要问题。
2 1 3
max 1 ( 1 0)
= b
o max b
失效判据 强度条件
1 b
1
b
nb
第8章 应力状态与强度理论及其工程应用
关于脆性断裂
第二强度理论又称为最大拉应变准则(maximum tensile strain criterion),它也是关于无裂纹脆性材 料构件的断裂失效的理论。
第8章 应力状态与强度理论及其工程应用
关于脆性断裂的强度理论
根据第二强度理论,无论材料处于什么应力状态, 只要发生脆性断裂,其共同原因都是由于微元的最大 拉应变达到了某个共同的极限值。
max
o max
(1 0)
第8章 应力状态与强度理论及其工程应用
材料力学第8章组合变形

MB
M
2 yB
M
2 zB
(364 N m)2 (1000N m)2 1064N m
•由Mz图和My图可知, B截面上的总弯矩最大, 并且由扭矩图可见B截 面上的扭矩与CD段其 它横截面上相同,TB =-1000 N·m,于是判 定横截面B为危险截面。
3. 根据MB和TB按第四强度理论建立的强度条件为
Wp
r4
M 2 0.75T 2
W
300N.m 1400N
300N.m
1500N 200
150
300N.m
128.6N.m
120N.m
(2)作内力图
危险截面E 左处
T 300N.m
M
M
2 y
M
2 z
176N.m
(3)由强度条件设计d
r3
M2 T2 W
W d 3
32
32 M 2 T 2
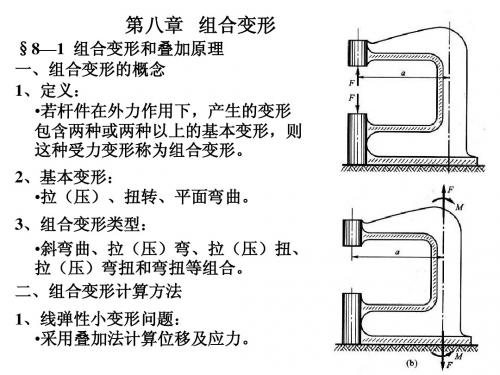
第8章 组合变形
8.1 组合变形和叠加原理 8.2 拉伸或压缩与弯曲的组合 8.3 偏心压缩和截面核心 8.4 扭转与弯曲的组合 8.5 组合变形的普遍情况
8.1 组合变形和叠加原理
组合变形——实际构件由外力所引起的变形包含两种或两 种以上的基本变形。如压力框架、烟囱、传动轴、有吊车 的立柱。 叠加原理——如果内力、应力、变形等与外力成线性关系, 则在小变形条件下,复杂受力情况下组合变形构件的内力, 应力,变形等力学响应可以分成几个基本变形单独受力情 况下相应力学响应的叠加,且与各单独受力的加载次序无 关。 前提条件:
即 亦即 于是得
r4
M 2 0.75T 2 [ ]
W
•请同学们按
照第三强度理 (1064 N m)2 0.75(1000 N m)2 100106 Pa W
材料力学第八章组合变形及连接部分的计算
t . max
Mz 0 FN Iy A
F
350
M
FN
425 10 3 F 0.075 F 5.3110 5 15 10 3 667 F Pa F Mz c. max 1 N Iy A
t .max
c.max
425 10 3 F 0.125 F 5 5.31 10 15 10 3 934 F Pa
50 150
425F 103 N.m
A 15000 mm2 z0 75mm z1 125mm I y 5.31107 mm4
y1
z0
y
z1
150 50 150
(2)立柱横截面的内力 FN F 50 M 425103 F N.m (3)立柱横截面的最大应力
az
中性轴
z0 0 y0 0
i z2 a y yo ey 2 iy a z zo ez
截面核心
y
中性轴
F (e y , e z )
z
求直径为D的圆截面的截面核心.
d a y1 2
i z2 ay ey
a z1
az
2 iy
2 4 d d 64 2 iy i z2 2 A d 4 16
F
1, 首先将斜弯曲分解 为两个平面弯曲的叠加
Fy F cos
L2
L2
Z y
My Wy
Fz F sin
2, 确定两个平面弯曲的最大弯矩
Z y
Wz 70.758cm 3
Mz
Fy L 4
Fz L My 4
查表: W y 692.2cm 3
Mz 0 FN Iy A
F
350
M
FN
425 10 3 F 0.075 F 5.3110 5 15 10 3 667 F Pa F Mz c. max 1 N Iy A
t .max
c.max
425 10 3 F 0.125 F 5 5.31 10 15 10 3 934 F Pa
50 150
425F 103 N.m
A 15000 mm2 z0 75mm z1 125mm I y 5.31107 mm4
y1
z0
y
z1
150 50 150
(2)立柱横截面的内力 FN F 50 M 425103 F N.m (3)立柱横截面的最大应力
az
中性轴
z0 0 y0 0
i z2 a y yo ey 2 iy a z zo ez
截面核心
y
中性轴
F (e y , e z )
z
求直径为D的圆截面的截面核心.
d a y1 2
i z2 ay ey
a z1
az
2 iy
2 4 d d 64 2 iy i z2 2 A d 4 16
F
1, 首先将斜弯曲分解 为两个平面弯曲的叠加
Fy F cos
L2
L2
Z y
My Wy
Fz F sin
2, 确定两个平面弯曲的最大弯矩
Z y
Wz 70.758cm 3
Mz
Fy L 4
Fz L My 4
查表: W y 692.2cm 3
材料力学-第8章应力状态与强度理论及其工程应用(A)
应力状态的基本概念
应力的面的概念——过同一点 不同方向面上的应力各不相同
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
受力之前,表面的正方形
FP
FP
受拉后,正方形变成了矩形,直角没有改变。
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
受力之前,表面斜置的正方形
FP
2
2
x
2
3
3
3
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
例题2
l
FP
S
a
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
y
1 例题2 4 2 3
z
x S平面
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
y
1
FQy
1
4
4 2
3
Mz
x
z
Mx
3
2
第8章 应力状态与强度理论及其工程应用
应力的点的概念——同一截面上 不同点的应力各不应力状态的基本概念
FQ F Nx
Mz
横截面上的正应力分布 横截面上的剪应力分布
横截面上正应力分析和剪应力分析的结果表明: 同一面上不同点的应力各不相同,此即应力的点的 概念。
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
描述一点应力状态的方法
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
描述一点应力状态的基本方法
微元(Element)
微元及其各面上一点 应力状态的描述
dx
dz
dy
应力的面的概念——过同一点 不同方向面上的应力各不相同
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
受力之前,表面的正方形
FP
FP
受拉后,正方形变成了矩形,直角没有改变。
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
受力之前,表面斜置的正方形
FP
2
2
x
2
3
3
3
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
例题2
l
FP
S
a
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
y
1 例题2 4 2 3
z
x S平面
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
y
1
FQy
1
4
4 2
3
Mz
x
z
Mx
3
2
第8章 应力状态与强度理论及其工程应用
应力的点的概念——同一截面上 不同点的应力各不应力状态的基本概念
FQ F Nx
Mz
横截面上的正应力分布 横截面上的剪应力分布
横截面上正应力分析和剪应力分析的结果表明: 同一面上不同点的应力各不相同,此即应力的点的 概念。
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
描述一点应力状态的方法
第8章 应力状态与强度理论及其工程应用
应力状态的基本概念
描述一点应力状态的基本方法
微元(Element)
微元及其各面上一点 应力状态的描述
dx
dz
dy
材料力学第8章-弯曲剪应力分析与弯曲中心的概念

TSINGHUA UNIVERSITY
第8章 弯曲剪应力分析与弯曲中心的概念
弯曲剪应力以及弯曲中心的概念
前提
1. 基于弯曲正应力的分析结果——承认纯弯 正应力公式在横向弯曲时依然成立。
Mzy
Iz
第8章 弯曲剪应力分析与弯曲中心的概念
弯曲剪应力以及弯曲中心的概念
前提
2. 因为薄壁截面杆的内壁和外壁都没有力作 用,应用剪应力互等定理,横截面上的剪应力作 用线必然沿着横截面周边的切线方向。
薄壁截面梁的弯曲中心
TSINGHUA UNIVERSITY
第8章 弯曲剪应力分析与弯曲中心的概念
薄壁截面梁的弯曲中心
TSINGHUA UNIVERSITY
TSINGHUA UNIVERSITY
第8章 弯曲剪应力分析与弯曲中心的概念
梁弯曲时横截面上的剪应力分析 实心截面梁的弯曲剪应力公式 薄壁截面梁的弯曲中心 结论与讨论
第8章 弯曲剪应力分析与弯曲中心的概念
薄壁截面梁的弯曲中心
薄壁杆件弯曲时为什么会发生扭转现象? 外力的作用线通过哪一点就不会发生扭转? 这一点的位置怎样确定?
第8章 弯曲剪应力分析与弯曲中心的概念
薄壁截面梁的弯曲中心
通过考察微段的局部平衡确定剪应力流的方向
TSINGHUA UNIVERSITY
横向弯曲时,梁的横截面上不仅有弯矩,而 且还有剪力。与剪力相对应的,梁的横截面上将 有剪应力。
分析弯曲剪应力的方法有别于分析弯曲正应 力的方法。
TSINGHUA UNIVERSITY
第8章 弯曲剪应力分析与弯曲中心的概念
弯曲剪应力以及弯曲中心的概念
分析模型-开口薄壁截面梁
材料力学第八章压杆的稳定性

第八章
压杆的稳定性
§8-1 压杆稳定性的概念
工程中存在着很多受压杆件。 受轴向压缩的直杆,其破坏有两种形式: 1)短粗的直杆,其破坏是由于横截面上的正应力达到 材料的极限应力,为强度破坏。 2)细长的直杆,其破坏 是由于杆不能保持原有的直线 平衡形式,为失稳破坏。 对于相对细长的压杆,其 破坏并非由于强度不足,而是 由于荷载(压力)增大到一定 数值后,不能保持原有直线平 衡形式而失效。
z y x 轴销
解:先计算压杆的柔度。 在xz面内,压杆两端可视为铰支,μ=1。查型钢表,得 l 1 2 iy=4.14cm,故 y 48.3 i y 0.0414
在xy面内,压杆两端可视为固支, μ=0.5。查型钢表,得iz=1.52cm, 故 l 0.5 2 z 65.8 iz 0.0152
n2π2EI l2
(n = 0,1,2…)
(Euler公式)
x Fcr
π w =Asin l x (半波正弦曲线) l x= 2 时 w0= A
A是压杆中点的挠度w0。为任意的微小值。
l
w
F与中点挠度w0之间的关系 (1) 若采用近似微分方程,则F 与如折线OAB所示; (2) 若采用精确的挠曲线微 分方程,则可得F与w0之间的 关系如曲线OAB'所示; F B'
例 某钢柱长7m,由两根16b号槽钢组成,材料 为Q235钢,横截面如图所示,截面类型为b类。钢柱 的两端截面上有4个直径为30mm的螺栓孔。钢柱μ=1.3 , 受260kN的轴向压力,材料的[σ]=170MPa。 (1)求两槽钢的间距h。 (2)校核钢柱的稳定性和强度。
解:(1) 确定两槽钢的间距h 钢柱两端约束在各方向均相同, 因此,最合理的设计应使Iy=Iz , 从 而使钢柱在各方向有相同的稳定性。
压杆的稳定性
§8-1 压杆稳定性的概念
工程中存在着很多受压杆件。 受轴向压缩的直杆,其破坏有两种形式: 1)短粗的直杆,其破坏是由于横截面上的正应力达到 材料的极限应力,为强度破坏。 2)细长的直杆,其破坏 是由于杆不能保持原有的直线 平衡形式,为失稳破坏。 对于相对细长的压杆,其 破坏并非由于强度不足,而是 由于荷载(压力)增大到一定 数值后,不能保持原有直线平 衡形式而失效。
z y x 轴销
解:先计算压杆的柔度。 在xz面内,压杆两端可视为铰支,μ=1。查型钢表,得 l 1 2 iy=4.14cm,故 y 48.3 i y 0.0414
在xy面内,压杆两端可视为固支, μ=0.5。查型钢表,得iz=1.52cm, 故 l 0.5 2 z 65.8 iz 0.0152
n2π2EI l2
(n = 0,1,2…)
(Euler公式)
x Fcr
π w =Asin l x (半波正弦曲线) l x= 2 时 w0= A
A是压杆中点的挠度w0。为任意的微小值。
l
w
F与中点挠度w0之间的关系 (1) 若采用近似微分方程,则F 与如折线OAB所示; (2) 若采用精确的挠曲线微 分方程,则可得F与w0之间的 关系如曲线OAB'所示; F B'
例 某钢柱长7m,由两根16b号槽钢组成,材料 为Q235钢,横截面如图所示,截面类型为b类。钢柱 的两端截面上有4个直径为30mm的螺栓孔。钢柱μ=1.3 , 受260kN的轴向压力,材料的[σ]=170MPa。 (1)求两槽钢的间距h。 (2)校核钢柱的稳定性和强度。
解:(1) 确定两槽钢的间距h 钢柱两端约束在各方向均相同, 因此,最合理的设计应使Iy=Iz , 从 而使钢柱在各方向有相同的稳定性。
材料力学(I)第八章-铆钉连接的计算
r1 r6 (40 mm)2 (40 mm)2 56.6 mm 0.0566 m
19
例题 8-10
r2 r5 (0)2 (60 mm)2 60 mm 0.06 m r3 r4 (40 mm)2 (80 mm)2 89.4 mm 0.0894 m
第 8 章 组合变形及连接部分的计算
§8-6 铆钉连接的计算
1
铆钉连接主要有三种方式: 1.搭接(图a),铆钉受单剪; 2.单盖板对接(图b),铆钉受单剪; 3.双盖板对接(图c),铆钉受双剪。
2
铆钉组承受横向荷载
实际铆钉组中位于 两端的铆钉所传递的力 要比中间的铆钉所传递 的力大。
为了简化计算,假设: (1) 如果作用于连接上的力其作用线通过铆钉组 中所有铆钉横截面的形心,而且各铆钉的材料和直径 均相同,则认为每个铆钉传递相等的力。 (2) 不考虑弯曲的影响。 铆钉连接与螺栓连接的计算方法相同。
(2) 其大小与该连线的长度成正比(将连接板视为刚 体),即 '' '' r1 '' '' r2 '' '' rn F1 Fi , F2 Fi ,, Fn Fi ri ri ri
14
于是由静力关系可导得:
M e Fi''ri F1''r1 F2''r2 Fi''ri Fn''rn
12
II. 作用于连接上的力其作用线不通过铆钉组形心 对于受偏心荷载F的铆钉连接(或螺栓连接) (图a),亦即作用于连接上的力其作用线不通过铆 钉组的形心O时,可如图b所示,简化为通过形心O 的力和力偶矩Me=F· e。
材料力学08应力状态理论
1.公式推导:
Fin 0 ,
sa dA s xdA cos2 a t xydA cosa sina
s ydAsin2 a t yxdAsina cosa 0
sa
同理, Fit 0, ta
2.任意a斜截面上的应力公式
sa
sx
sy
2
sx
s y
2
cos2a
1 2
s11
等于所示阴影部分面积
切应力的极值作用面与正应力
的极值作用面互成 45o的夹角
t max
s
(
x
s
2
y
)2
t
2 xy
s max
s min
2
min
极值切应力作用面上的正应力:
s0
s0900
sx
sy
2
5.平面应力状态分析的特征 1)斜截面应力、主应力及最大切应力均是指 xy 平面内的应 力,即其作用面均垂宜于 xy 平面。 2)任意两相互垂直截面上的正应力之和为常量
sa0 及sa0900的方向是相互垂直的。其中,a0由sin2a0和cos2a0的
正负号唯一地确定。
3.正应力极值——主应力
sa0
a0 900
s max
min
sx
sy
2
sx
s
2
y
2
t
2 xy
又,ta0 0 极值正应力就是主应力!
a0 900
smax的指向是介于仅由单
2.纯剪切平面应力状态
V
1
2
E
(s
1
学-材料力学-8-梁的位移分析与资料
TSINGHUA UNIVERSITY
基本概念
梁的位移分析的工程意义
工程设计中还有另外一类问题,所考虑的不是限制构件 的弹性位移,而是希望在构件不发生强度失效的前提下,尽量 产生较大的弹性位移。例如,各种车辆中用于减振的板簧,都 是采用厚度不大的板条叠合而成,采用这种结构,板簧既可以 承受很大的力而不发生破坏,同时又能承受较大的弹性变形, 吸收车辆受到振动和冲击时产生的动能,受到抗振和抗冲击的 效果。
TSINGHUA UNIVERSITY
基本概念
梁的挠度与转角
梁在弯曲变形后,横截面的位置将发生改变,种位置的 改变称为位移(displacement)。梁的位移包括三部分:
横截面形心沿水平方向的位移,称为轴向位移或水平 位移(horizontal displacement),用u表示。
三 种 情 形 下 , AB 段 梁 的
曲率(1/)处处对应相等,
因而挠度曲线具有相同的形 状。但是,在三种情形下, 由于约束的不同,梁的位移 则不完全相同。
对于没有约束的梁,因 为其在空间的位置不确定, 故无从确定其位移。
基本概念
梁的位移分析的工程意义
TSINGHUA UNIVERSITY
第8章 弯曲刚度
若材料的应力一应变关系满足胡克定律,又在弹性范 围内加载,则位移与力(均为广义的)之间均存在线性关 系。因此,不同的力在同一处引起的同一种位移可以相互 叠加。
本章将在分析变形与位移关系的基础上,建立确定梁 位移的小挠度微分方程及其积分的概念,重点介绍工程上 应用的叠加法以及梁的刚度设计准则。
于是有
dw
dx w= w(x),称为挠度方程(deflection equation)。
材料力学第8章 组合变形

b.未通过轴线或形心主惯性轴,向其分解
注意:荷载分解、简化的前提是不改变研究段的内力。
(2)内力分析方法
用截面法计算任意截面的内力,通过内力确定变形的组成
z
Fsz My
Ty
Fsy
M z FN
FN
T
x M z , Fsy M y , Fsz
轴向拉、压 扭转 x,y面内的平面弯曲 x,z面内的平面弯曲
§8-2 两相互垂直平面内的弯曲
F sin
F cos F
(2)求B点的应力
MB FN
WA
12.32103 25103
0.1 0.22
0.1 0.2
6
B
17.23 MPa
(3)求B点30º斜截面上的正应力
300 cos2 30 17.23 cos2 30 12.99 MPa
(4)求B点的主应力
1 0 2 0 3 17.23 MPa
z
面梁,其横截面都有两个相互垂直的对称 轴,且截面的周边具有棱角,故横截面上
Mz
的最大正应力发生在截面的棱角处。于是
,可根据梁的变形情况,直接确定截面上
My
最大拉、压应力点的位置,而无需定出其
y
中性轴。
因危险点为单向应力状态(忽略弯曲切应力的影响), 故,强度条件为:
max
M y max Wy
F sin
12.32kN m
F cos F
例: 如图示一矩形截面折杆,已知F=50kN,尺寸如图所示, α=30°。(1)求B点横截面上的应力;(2)求B点α=30°截
面上的正应力;(3)求B点的主应力σ1、 σ2、 σ3。
FN
B
MB 100mm
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
在图示坐标系中,挠度w向下为正,向上为负;
顺时针转向的转角q为正,逆时针转向的转角q为负。
5
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
§8-2 梁的挠曲线近似微分方程及其积分
Ⅰ. 挠曲线近似微分方程的导出 在§4-4中曾得到等直梁在线弹性范围内纯弯曲情况
第八章 梁弯曲时的位移
由另一支座约束条件 w2|x=l=0 有
b l EIw2 | x l F l b
3 3 F l a C l 0 2
例题8-3 试求图示等直梁的挠曲线方程和转角方程,
并确定其最大挠度wmax和最大转角qmax。
25
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
解:约束力为
b a FA F , FB F l l
两段梁的弯矩方程分别为
b M 1 x FA x F x 0 x a l b M 2 x FA x F x a F x F x a a x l l
22
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
该梁的边界条件为 在 x=0 处 w=0,
在 x=l 处 w=0
q l4 l4 C2 0 及 EIw | x l C1l 0 2 6 12
于是有
即
从而有 转角方程
ql 3 C1 ,C2 0 24
的10倍,此时剪力FS对梁的变形的影响可略去不计,而有
1 M x x x EI
注意:对于有些l/h>10的梁,例如工字形截面等直梁,如同
在核电站中会遇到的那样,梁的翼缘由不锈钢制作,而主 要承受剪力的腹板则由价廉但切变模量较小的复合材料制 作,此时剪切变形对梁的变形的影响是不可忽略的。
3
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
(a)
(b)
直梁弯曲时的挠度和转角这两个位移不但与梁的弯曲
变形程度(挠曲线曲率的大小)有关,也与支座约束的条件
有关。图a和图b所示两根梁,如果它们的材料和尺寸相同, 所受的外力偶之矩Me也相等,显然它们的变形程度(也就 是挠曲线的曲率大小)相同,但两根梁相应截面的挠度和 转角则明显不同。
7
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
从几何方面来看,平面曲线的曲率可写作
1 w x 1 w 2
3/ 2
式中,等号右边有正负号是因为曲率1/为度量平面曲线 (挠曲线)弯曲变形程度的非负值的量,而w"是q = w' 沿x方 向的变化率,是有正负的。
11
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
边界条件(这里也就是支座处的约束条件)的示例如 下图所示。
12
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
若由于梁上的荷载不连续等原因使得梁的弯矩方程
需分段写出时,各段梁的挠曲线近似微分方程也就不同。
而对各段梁的近似微分方程积分时,都将出现两个积分 常数。要确定这些积分常数,除利用支座处的约束条件 (constraint condition)外,还需利用相邻两段梁在交界处 的连续条件(continuity condition)。这两类条件统称为边
为了后面确定积分常数的方便,右边那段梁的弯矩方 程M2(x)仍取x截面左边的梁为分离体,使方程M2(x)中的第 一项与方程M1(x)中的项相同。
26
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
两段梁的挠曲线近似微分方程亦需分段列出,并分别进行积分: 左段梁0 x a
右段梁 a x l
第八章 梁弯曲时的位移
该梁的两类边界条件为 连续条件:
w2 ,w1=w2 在x=a处 w1
支座约束条件:在x=0处 w1=0,在 x=l 处 w2=0 由两个连续条件得:
C1 C2, D1 D2
由支座约束条件 w1|x=0=0 得
D1 0
29
从而也有
D2 0
材 料 力 学 Ⅰ 电 子 教 案
EIw M x F l x
以x为自变量进行积分得 x2 EIw F lx 2 C1
lx 2 x 3 EIw F 2 6 C1 x C2
该梁的边界条件为:在 x=0 处 w 0,w =0
下中性层的曲率为
M EI 1
这也就是位于中性层内的 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
在横力弯曲下,梁的横截面上除弯矩M=M(x)外,还 有剪力FS=FS(x),剪力产生的剪切变形对梁的变形也会产
生影响。但工程上常用的梁其跨长l 往往大于横截面高度h
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
§8-1 梁的位移——挠度和转角 §8-2 梁的挠曲线近似微分方程及其积分 §8-3 按叠加原理计算梁的挠度和转角
*§ 8 - 4
简单的静不定梁
§8-5 弯曲刚度计算
§8-6 结论与讨论
1
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
于是得
15
C1 0,C2 0
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
从而有
转角方程
Fxl Fx 2 q w EI 2 EI
Fx 2l Fx3 挠曲线方程 w 2 EI 6 EI
根据该梁边界条件和全梁横截面上弯矩均为负值,
以及挠曲线应光滑连续描出了挠曲线的示意图。
§8-1 梁的位移——挠度和转角
直梁在对称平面xy内弯曲时其原来的轴线AB将弯曲成 平面曲线AC1B。梁的横截面形心(即轴线AB上的点)在垂直 于x轴方向的线位移w称为挠度(deflection),横截面对其原
来位置的角位移q 称为横截面的转角(angle of rotation)。
2
材 料 力 学 Ⅰ 电 子 教 案
最大挠度在跨中,其值为
2 3 4 ql 2 3 l l 5ql wm ax w | x l 2 l 2l 24 EI 2 2 384 EI
24
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
界条件。
13
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
例题8-1 试求图示等直梁的挠曲线方程和转角方程,
并确定其最大挠度wmax和最大转角qmax。
14
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
解:该梁的弯矩方程为
M x F l x
挠曲线近似微分方程为
21
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
解:该梁的弯矩方程为
M x ql 1 q x qx2 lx x 2 2 2 2
挠曲线近似微分方程为
EIw M x q lx x 2 2
以x为自变量进行积分得:
q lx 2 x 3 EIw C1 2 2 3 q lx3 x 4 EIw C1 x C2 2 6 12
b x 2 F x a F EIw2 C2 l 2 2
2
b x 3 F x a EIw2 F C2 x l 6 6 D2
3
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
值得注意的是,在对右段梁进行积分运算时,对于含
有(x-a)的项没有以x 为自变量而是以(x-a)作为自变量进行
18
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
事实上,当以x为自变量时
EIw M x d x C1 EIw [ [ M x d x] d x C1 x C2
两式中的积分在坐标原点处(即x=0处)总是等于零,从而有
C1 EIw | x 0 EIq 0 C2 EIw | x 0 EIw0
9
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
Ⅱ. 挠曲线近似微分方程的积分及边界条件
M x w EI
求等直梁的挠曲线方程时可将上式改写为
EIw M x
后进行积分,再利用边界条件(boundary condition)确定积分
常数。
10
材 料 力 学 Ⅰ 电 子 教 案
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
由此题可见,当以x为自变量对挠曲线近似微分方程
进行积分时,所得转角方程和挠曲线方程中的积分常数
是有其几何意义的:
C1 EIw | x 0 EIq 0 C2 EIw | x 0 EIw0
此例题所示的悬臂梁,q0=0,w0=0, 因而也有C1=0 ,C2=0。
积分的,因为这样可在运用连续条件 w1 '|x=a=w2'|x=a 及 w1|x=a=w2|x=a 确定积分常数时含有(x-a)2和(x-a)3的项为零而 使工作量减少。又,在对左段梁进行积分运算时仍以x 为 自变量进行,故仍有C1=EIq0,D1=EIw0。
28
材 料 力 学 Ⅰ 电 子 教 案
19
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
思考: 试求图示等截面悬臂梁在所示坐标系中的挠曲线
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
在图示坐标系中,挠度w向下为正,向上为负;
顺时针转向的转角q为正,逆时针转向的转角q为负。
5
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
§8-2 梁的挠曲线近似微分方程及其积分
Ⅰ. 挠曲线近似微分方程的导出 在§4-4中曾得到等直梁在线弹性范围内纯弯曲情况
第八章 梁弯曲时的位移
由另一支座约束条件 w2|x=l=0 有
b l EIw2 | x l F l b
3 3 F l a C l 0 2
例题8-3 试求图示等直梁的挠曲线方程和转角方程,
并确定其最大挠度wmax和最大转角qmax。
25
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
解:约束力为
b a FA F , FB F l l
两段梁的弯矩方程分别为
b M 1 x FA x F x 0 x a l b M 2 x FA x F x a F x F x a a x l l
22
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
该梁的边界条件为 在 x=0 处 w=0,
在 x=l 处 w=0
q l4 l4 C2 0 及 EIw | x l C1l 0 2 6 12
于是有
即
从而有 转角方程
ql 3 C1 ,C2 0 24
的10倍,此时剪力FS对梁的变形的影响可略去不计,而有
1 M x x x EI
注意:对于有些l/h>10的梁,例如工字形截面等直梁,如同
在核电站中会遇到的那样,梁的翼缘由不锈钢制作,而主 要承受剪力的腹板则由价廉但切变模量较小的复合材料制 作,此时剪切变形对梁的变形的影响是不可忽略的。
3
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
(a)
(b)
直梁弯曲时的挠度和转角这两个位移不但与梁的弯曲
变形程度(挠曲线曲率的大小)有关,也与支座约束的条件
有关。图a和图b所示两根梁,如果它们的材料和尺寸相同, 所受的外力偶之矩Me也相等,显然它们的变形程度(也就 是挠曲线的曲率大小)相同,但两根梁相应截面的挠度和 转角则明显不同。
7
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
从几何方面来看,平面曲线的曲率可写作
1 w x 1 w 2
3/ 2
式中,等号右边有正负号是因为曲率1/为度量平面曲线 (挠曲线)弯曲变形程度的非负值的量,而w"是q = w' 沿x方 向的变化率,是有正负的。
11
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
边界条件(这里也就是支座处的约束条件)的示例如 下图所示。
12
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
若由于梁上的荷载不连续等原因使得梁的弯矩方程
需分段写出时,各段梁的挠曲线近似微分方程也就不同。
而对各段梁的近似微分方程积分时,都将出现两个积分 常数。要确定这些积分常数,除利用支座处的约束条件 (constraint condition)外,还需利用相邻两段梁在交界处 的连续条件(continuity condition)。这两类条件统称为边
为了后面确定积分常数的方便,右边那段梁的弯矩方 程M2(x)仍取x截面左边的梁为分离体,使方程M2(x)中的第 一项与方程M1(x)中的项相同。
26
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
两段梁的挠曲线近似微分方程亦需分段列出,并分别进行积分: 左段梁0 x a
右段梁 a x l
第八章 梁弯曲时的位移
该梁的两类边界条件为 连续条件:
w2 ,w1=w2 在x=a处 w1
支座约束条件:在x=0处 w1=0,在 x=l 处 w2=0 由两个连续条件得:
C1 C2, D1 D2
由支座约束条件 w1|x=0=0 得
D1 0
29
从而也有
D2 0
材 料 力 学 Ⅰ 电 子 教 案
EIw M x F l x
以x为自变量进行积分得 x2 EIw F lx 2 C1
lx 2 x 3 EIw F 2 6 C1 x C2
该梁的边界条件为:在 x=0 处 w 0,w =0
下中性层的曲率为
M EI 1
这也就是位于中性层内的 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
在横力弯曲下,梁的横截面上除弯矩M=M(x)外,还 有剪力FS=FS(x),剪力产生的剪切变形对梁的变形也会产
生影响。但工程上常用的梁其跨长l 往往大于横截面高度h
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
§8-1 梁的位移——挠度和转角 §8-2 梁的挠曲线近似微分方程及其积分 §8-3 按叠加原理计算梁的挠度和转角
*§ 8 - 4
简单的静不定梁
§8-5 弯曲刚度计算
§8-6 结论与讨论
1
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
于是得
15
C1 0,C2 0
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
从而有
转角方程
Fxl Fx 2 q w EI 2 EI
Fx 2l Fx3 挠曲线方程 w 2 EI 6 EI
根据该梁边界条件和全梁横截面上弯矩均为负值,
以及挠曲线应光滑连续描出了挠曲线的示意图。
§8-1 梁的位移——挠度和转角
直梁在对称平面xy内弯曲时其原来的轴线AB将弯曲成 平面曲线AC1B。梁的横截面形心(即轴线AB上的点)在垂直 于x轴方向的线位移w称为挠度(deflection),横截面对其原
来位置的角位移q 称为横截面的转角(angle of rotation)。
2
材 料 力 学 Ⅰ 电 子 教 案
最大挠度在跨中,其值为
2 3 4 ql 2 3 l l 5ql wm ax w | x l 2 l 2l 24 EI 2 2 384 EI
24
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
界条件。
13
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
例题8-1 试求图示等直梁的挠曲线方程和转角方程,
并确定其最大挠度wmax和最大转角qmax。
14
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
解:该梁的弯矩方程为
M x F l x
挠曲线近似微分方程为
21
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
解:该梁的弯矩方程为
M x ql 1 q x qx2 lx x 2 2 2 2
挠曲线近似微分方程为
EIw M x q lx x 2 2
以x为自变量进行积分得:
q lx 2 x 3 EIw C1 2 2 3 q lx3 x 4 EIw C1 x C2 2 6 12
b x 2 F x a F EIw2 C2 l 2 2
2
b x 3 F x a EIw2 F C2 x l 6 6 D2
3
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
值得注意的是,在对右段梁进行积分运算时,对于含
有(x-a)的项没有以x 为自变量而是以(x-a)作为自变量进行
18
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
事实上,当以x为自变量时
EIw M x d x C1 EIw [ [ M x d x] d x C1 x C2
两式中的积分在坐标原点处(即x=0处)总是等于零,从而有
C1 EIw | x 0 EIq 0 C2 EIw | x 0 EIw0
9
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
Ⅱ. 挠曲线近似微分方程的积分及边界条件
M x w EI
求等直梁的挠曲线方程时可将上式改写为
EIw M x
后进行积分,再利用边界条件(boundary condition)确定积分
常数。
10
材 料 力 学 Ⅰ 电 子 教 案
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
由此题可见,当以x为自变量对挠曲线近似微分方程
进行积分时,所得转角方程和挠曲线方程中的积分常数
是有其几何意义的:
C1 EIw | x 0 EIq 0 C2 EIw | x 0 EIw0
此例题所示的悬臂梁,q0=0,w0=0, 因而也有C1=0 ,C2=0。
积分的,因为这样可在运用连续条件 w1 '|x=a=w2'|x=a 及 w1|x=a=w2|x=a 确定积分常数时含有(x-a)2和(x-a)3的项为零而 使工作量减少。又,在对左段梁进行积分运算时仍以x 为 自变量进行,故仍有C1=EIq0,D1=EIw0。
28
材 料 力 学 Ⅰ 电 子 教 案
19
材 料 力 学 Ⅰ 电 子 教 案
第八章 梁弯曲时的位移
思考: 试求图示等截面悬臂梁在所示坐标系中的挠曲线