A machine learning framework for automatically annotating web pages with simple HTML ontolo
基于先进人工智能的发动机数据驱动建模方法

基于先进人工智能的发动机数据驱动建模方法基于先进人工智能的发动机数据驱动建模方法引言随着人工智能的发展和应用,越来越多的领域开始关注如何利用人工智能技术来解决实际问题。
在航空领域中,特别是发动机控制与优化方面,基于先进人工智能的数据驱动建模方法成为研究的热点和发展方向。
本文将重点介绍几种常见的基于先进人工智能的发动机数据驱动建模方法。
1. 监督学习方法监督学习是一种基于标注数据进行模型训练和预测的方法。
在发动机数据驱动建模中,监督学习方法可以利用历史的数据,建立一个预测模型,用于估计发动机的性能指标,如寿命、燃油消耗等。
常见的监督学习方法包括线性回归、支持向量机、神经网络等。
2. 无监督学习方法无监督学习是一种未标注数据的建模方法,主要用于聚类、降维等任务。
在发动机数据驱动建模中,无监督学习方法可以通过对发动机数据进行聚类,将相似性高的数据样本分组,并发现隐藏在数据中的模式和结构。
常见的无监督学习方法包括K均值聚类、主成分分析等。
3. 强化学习方法强化学习是一种通过和环境的交互来学习最优策略的方法。
在发动机数据驱动建模中,强化学习方法可以用于优化发动机的控制策略,使其在不同的工况下获得最佳的性能。
常见的强化学习方法包括Q-learning、深度强化学习等。
4. 深度学习方法深度学习是一种以多层神经网络为基础的机器学习方法。
在发动机数据驱动建模中,深度学习方法可以用于特征提取、目标检测等任务,以帮助准确地建立发动机的模型。
常见的深度学习方法包括卷积神经网络、循环神经网络等。
5. 迁移学习方法迁移学习是一种将已学习模型的知识迁移到其他任务中的方法。
在发动机数据驱动建模中,迁移学习方法可以利用已有的发动机数据模型,在新的发动机数据集上进行微调,加速新模型的训练过程。
常见的迁移学习方法包括特征提取迁移、模型微调等。
结论基于先进人工智能的发动机数据驱动建模方法在航空领域中具有广泛的应用前景。
监督学习、无监督学习、强化学习、深度学习和迁移学习等多种方法可以相互结合,为发动机的控制与优化提供更有效的解决方案。
机器学习与人工智能领域中常用的英语词汇
机器学习与人工智能领域中常用的英语词汇1.General Concepts (基础概念)•Artificial Intelligence (AI) - 人工智能1)Artificial Intelligence (AI) - 人工智能2)Machine Learning (ML) - 机器学习3)Deep Learning (DL) - 深度学习4)Neural Network - 神经网络5)Natural Language Processing (NLP) - 自然语言处理6)Computer Vision - 计算机视觉7)Robotics - 机器人技术8)Speech Recognition - 语音识别9)Expert Systems - 专家系统10)Knowledge Representation - 知识表示11)Pattern Recognition - 模式识别12)Cognitive Computing - 认知计算13)Autonomous Systems - 自主系统14)Human-Machine Interaction - 人机交互15)Intelligent Agents - 智能代理16)Machine Translation - 机器翻译17)Swarm Intelligence - 群体智能18)Genetic Algorithms - 遗传算法19)Fuzzy Logic - 模糊逻辑20)Reinforcement Learning - 强化学习•Machine Learning (ML) - 机器学习1)Machine Learning (ML) - 机器学习2)Artificial Neural Network - 人工神经网络3)Deep Learning - 深度学习4)Supervised Learning - 有监督学习5)Unsupervised Learning - 无监督学习6)Reinforcement Learning - 强化学习7)Semi-Supervised Learning - 半监督学习8)Training Data - 训练数据9)Test Data - 测试数据10)Validation Data - 验证数据11)Feature - 特征12)Label - 标签13)Model - 模型14)Algorithm - 算法15)Regression - 回归16)Classification - 分类17)Clustering - 聚类18)Dimensionality Reduction - 降维19)Overfitting - 过拟合20)Underfitting - 欠拟合•Deep Learning (DL) - 深度学习1)Deep Learning - 深度学习2)Neural Network - 神经网络3)Artificial Neural Network (ANN) - 人工神经网络4)Convolutional Neural Network (CNN) - 卷积神经网络5)Recurrent Neural Network (RNN) - 循环神经网络6)Long Short-Term Memory (LSTM) - 长短期记忆网络7)Gated Recurrent Unit (GRU) - 门控循环单元8)Autoencoder - 自编码器9)Generative Adversarial Network (GAN) - 生成对抗网络10)Transfer Learning - 迁移学习11)Pre-trained Model - 预训练模型12)Fine-tuning - 微调13)Feature Extraction - 特征提取14)Activation Function - 激活函数15)Loss Function - 损失函数16)Gradient Descent - 梯度下降17)Backpropagation - 反向传播18)Epoch - 训练周期19)Batch Size - 批量大小20)Dropout - 丢弃法•Neural Network - 神经网络1)Neural Network - 神经网络2)Artificial Neural Network (ANN) - 人工神经网络3)Deep Neural Network (DNN) - 深度神经网络4)Convolutional Neural Network (CNN) - 卷积神经网络5)Recurrent Neural Network (RNN) - 循环神经网络6)Long Short-Term Memory (LSTM) - 长短期记忆网络7)Gated Recurrent Unit (GRU) - 门控循环单元8)Feedforward Neural Network - 前馈神经网络9)Multi-layer Perceptron (MLP) - 多层感知器10)Radial Basis Function Network (RBFN) - 径向基函数网络11)Hopfield Network - 霍普菲尔德网络12)Boltzmann Machine - 玻尔兹曼机13)Autoencoder - 自编码器14)Spiking Neural Network (SNN) - 脉冲神经网络15)Self-organizing Map (SOM) - 自组织映射16)Restricted Boltzmann Machine (RBM) - 受限玻尔兹曼机17)Hebbian Learning - 海比安学习18)Competitive Learning - 竞争学习19)Neuroevolutionary - 神经进化20)Neuron - 神经元•Algorithm - 算法1)Algorithm - 算法2)Supervised Learning Algorithm - 有监督学习算法3)Unsupervised Learning Algorithm - 无监督学习算法4)Reinforcement Learning Algorithm - 强化学习算法5)Classification Algorithm - 分类算法6)Regression Algorithm - 回归算法7)Clustering Algorithm - 聚类算法8)Dimensionality Reduction Algorithm - 降维算法9)Decision Tree Algorithm - 决策树算法10)Random Forest Algorithm - 随机森林算法11)Support Vector Machine (SVM) Algorithm - 支持向量机算法12)K-Nearest Neighbors (KNN) Algorithm - K近邻算法13)Naive Bayes Algorithm - 朴素贝叶斯算法14)Gradient Descent Algorithm - 梯度下降算法15)Genetic Algorithm - 遗传算法16)Neural Network Algorithm - 神经网络算法17)Deep Learning Algorithm - 深度学习算法18)Ensemble Learning Algorithm - 集成学习算法19)Reinforcement Learning Algorithm - 强化学习算法20)Metaheuristic Algorithm - 元启发式算法•Model - 模型1)Model - 模型2)Machine Learning Model - 机器学习模型3)Artificial Intelligence Model - 人工智能模型4)Predictive Model - 预测模型5)Classification Model - 分类模型6)Regression Model - 回归模型7)Generative Model - 生成模型8)Discriminative Model - 判别模型9)Probabilistic Model - 概率模型10)Statistical Model - 统计模型11)Neural Network Model - 神经网络模型12)Deep Learning Model - 深度学习模型13)Ensemble Model - 集成模型14)Reinforcement Learning Model - 强化学习模型15)Support Vector Machine (SVM) Model - 支持向量机模型16)Decision Tree Model - 决策树模型17)Random Forest Model - 随机森林模型18)Naive Bayes Model - 朴素贝叶斯模型19)Autoencoder Model - 自编码器模型20)Convolutional Neural Network (CNN) Model - 卷积神经网络模型•Dataset - 数据集1)Dataset - 数据集2)Training Dataset - 训练数据集3)Test Dataset - 测试数据集4)Validation Dataset - 验证数据集5)Balanced Dataset - 平衡数据集6)Imbalanced Dataset - 不平衡数据集7)Synthetic Dataset - 合成数据集8)Benchmark Dataset - 基准数据集9)Open Dataset - 开放数据集10)Labeled Dataset - 标记数据集11)Unlabeled Dataset - 未标记数据集12)Semi-Supervised Dataset - 半监督数据集13)Multiclass Dataset - 多分类数据集14)Feature Set - 特征集15)Data Augmentation - 数据增强16)Data Preprocessing - 数据预处理17)Missing Data - 缺失数据18)Outlier Detection - 异常值检测19)Data Imputation - 数据插补20)Metadata - 元数据•Training - 训练1)Training - 训练2)Training Data - 训练数据3)Training Phase - 训练阶段4)Training Set - 训练集5)Training Examples - 训练样本6)Training Instance - 训练实例7)Training Algorithm - 训练算法8)Training Model - 训练模型9)Training Process - 训练过程10)Training Loss - 训练损失11)Training Epoch - 训练周期12)Training Batch - 训练批次13)Online Training - 在线训练14)Offline Training - 离线训练15)Continuous Training - 连续训练16)Transfer Learning - 迁移学习17)Fine-Tuning - 微调18)Curriculum Learning - 课程学习19)Self-Supervised Learning - 自监督学习20)Active Learning - 主动学习•Testing - 测试1)Testing - 测试2)Test Data - 测试数据3)Test Set - 测试集4)Test Examples - 测试样本5)Test Instance - 测试实例6)Test Phase - 测试阶段7)Test Accuracy - 测试准确率8)Test Loss - 测试损失9)Test Error - 测试错误10)Test Metrics - 测试指标11)Test Suite - 测试套件12)Test Case - 测试用例13)Test Coverage - 测试覆盖率14)Cross-Validation - 交叉验证15)Holdout Validation - 留出验证16)K-Fold Cross-Validation - K折交叉验证17)Stratified Cross-Validation - 分层交叉验证18)Test Driven Development (TDD) - 测试驱动开发19)A/B Testing - A/B 测试20)Model Evaluation - 模型评估•Validation - 验证1)Validation - 验证2)Validation Data - 验证数据3)Validation Set - 验证集4)Validation Examples - 验证样本5)Validation Instance - 验证实例6)Validation Phase - 验证阶段7)Validation Accuracy - 验证准确率8)Validation Loss - 验证损失9)Validation Error - 验证错误10)Validation Metrics - 验证指标11)Cross-Validation - 交叉验证12)Holdout Validation - 留出验证13)K-Fold Cross-Validation - K折交叉验证14)Stratified Cross-Validation - 分层交叉验证15)Leave-One-Out Cross-Validation - 留一法交叉验证16)Validation Curve - 验证曲线17)Hyperparameter Validation - 超参数验证18)Model Validation - 模型验证19)Early Stopping - 提前停止20)Validation Strategy - 验证策略•Supervised Learning - 有监督学习1)Supervised Learning - 有监督学习2)Label - 标签3)Feature - 特征4)Target - 目标5)Training Labels - 训练标签6)Training Features - 训练特征7)Training Targets - 训练目标8)Training Examples - 训练样本9)Training Instance - 训练实例10)Regression - 回归11)Classification - 分类12)Predictor - 预测器13)Regression Model - 回归模型14)Classifier - 分类器15)Decision Tree - 决策树16)Support Vector Machine (SVM) - 支持向量机17)Neural Network - 神经网络18)Feature Engineering - 特征工程19)Model Evaluation - 模型评估20)Overfitting - 过拟合21)Underfitting - 欠拟合22)Bias-Variance Tradeoff - 偏差-方差权衡•Unsupervised Learning - 无监督学习1)Unsupervised Learning - 无监督学习2)Clustering - 聚类3)Dimensionality Reduction - 降维4)Anomaly Detection - 异常检测5)Association Rule Learning - 关联规则学习6)Feature Extraction - 特征提取7)Feature Selection - 特征选择8)K-Means - K均值9)Hierarchical Clustering - 层次聚类10)Density-Based Clustering - 基于密度的聚类11)Principal Component Analysis (PCA) - 主成分分析12)Independent Component Analysis (ICA) - 独立成分分析13)T-distributed Stochastic Neighbor Embedding (t-SNE) - t分布随机邻居嵌入14)Gaussian Mixture Model (GMM) - 高斯混合模型15)Self-Organizing Maps (SOM) - 自组织映射16)Autoencoder - 自动编码器17)Latent Variable - 潜变量18)Data Preprocessing - 数据预处理19)Outlier Detection - 异常值检测20)Clustering Algorithm - 聚类算法•Reinforcement Learning - 强化学习1)Reinforcement Learning - 强化学习2)Agent - 代理3)Environment - 环境4)State - 状态5)Action - 动作6)Reward - 奖励7)Policy - 策略8)Value Function - 值函数9)Q-Learning - Q学习10)Deep Q-Network (DQN) - 深度Q网络11)Policy Gradient - 策略梯度12)Actor-Critic - 演员-评论家13)Exploration - 探索14)Exploitation - 开发15)Temporal Difference (TD) - 时间差分16)Markov Decision Process (MDP) - 马尔可夫决策过程17)State-Action-Reward-State-Action (SARSA) - 状态-动作-奖励-状态-动作18)Policy Iteration - 策略迭代19)Value Iteration - 值迭代20)Monte Carlo Methods - 蒙特卡洛方法•Semi-Supervised Learning - 半监督学习1)Semi-Supervised Learning - 半监督学习2)Labeled Data - 有标签数据3)Unlabeled Data - 无标签数据4)Label Propagation - 标签传播5)Self-Training - 自训练6)Co-Training - 协同训练7)Transudative Learning - 传导学习8)Inductive Learning - 归纳学习9)Manifold Regularization - 流形正则化10)Graph-based Methods - 基于图的方法11)Cluster Assumption - 聚类假设12)Low-Density Separation - 低密度分离13)Semi-Supervised Support Vector Machines (S3VM) - 半监督支持向量机14)Expectation-Maximization (EM) - 期望最大化15)Co-EM - 协同期望最大化16)Entropy-Regularized EM - 熵正则化EM17)Mean Teacher - 平均教师18)Virtual Adversarial Training - 虚拟对抗训练19)Tri-training - 三重训练20)Mix Match - 混合匹配•Feature - 特征1)Feature - 特征2)Feature Engineering - 特征工程3)Feature Extraction - 特征提取4)Feature Selection - 特征选择5)Input Features - 输入特征6)Output Features - 输出特征7)Feature Vector - 特征向量8)Feature Space - 特征空间9)Feature Representation - 特征表示10)Feature Transformation - 特征转换11)Feature Importance - 特征重要性12)Feature Scaling - 特征缩放13)Feature Normalization - 特征归一化14)Feature Encoding - 特征编码15)Feature Fusion - 特征融合16)Feature Dimensionality Reduction - 特征维度减少17)Continuous Feature - 连续特征18)Categorical Feature - 分类特征19)Nominal Feature - 名义特征20)Ordinal Feature - 有序特征•Label - 标签1)Label - 标签2)Labeling - 标注3)Ground Truth - 地面真值4)Class Label - 类别标签5)Target Variable - 目标变量6)Labeling Scheme - 标注方案7)Multi-class Labeling - 多类别标注8)Binary Labeling - 二分类标注9)Label Noise - 标签噪声10)Labeling Error - 标注错误11)Label Propagation - 标签传播12)Unlabeled Data - 无标签数据13)Labeled Data - 有标签数据14)Semi-supervised Learning - 半监督学习15)Active Learning - 主动学习16)Weakly Supervised Learning - 弱监督学习17)Noisy Label Learning - 噪声标签学习18)Self-training - 自训练19)Crowdsourcing Labeling - 众包标注20)Label Smoothing - 标签平滑化•Prediction - 预测1)Prediction - 预测2)Forecasting - 预测3)Regression - 回归4)Classification - 分类5)Time Series Prediction - 时间序列预测6)Forecast Accuracy - 预测准确性7)Predictive Modeling - 预测建模8)Predictive Analytics - 预测分析9)Forecasting Method - 预测方法10)Predictive Performance - 预测性能11)Predictive Power - 预测能力12)Prediction Error - 预测误差13)Prediction Interval - 预测区间14)Prediction Model - 预测模型15)Predictive Uncertainty - 预测不确定性16)Forecast Horizon - 预测时间跨度17)Predictive Maintenance - 预测性维护18)Predictive Policing - 预测式警务19)Predictive Healthcare - 预测性医疗20)Predictive Maintenance - 预测性维护•Classification - 分类1)Classification - 分类2)Classifier - 分类器3)Class - 类别4)Classify - 对数据进行分类5)Class Label - 类别标签6)Binary Classification - 二元分类7)Multiclass Classification - 多类分类8)Class Probability - 类别概率9)Decision Boundary - 决策边界10)Decision Tree - 决策树11)Support Vector Machine (SVM) - 支持向量机12)K-Nearest Neighbors (KNN) - K最近邻算法13)Naive Bayes - 朴素贝叶斯14)Logistic Regression - 逻辑回归15)Random Forest - 随机森林16)Neural Network - 神经网络17)SoftMax Function - SoftMax函数18)One-vs-All (One-vs-Rest) - 一对多(一对剩余)19)Ensemble Learning - 集成学习20)Confusion Matrix - 混淆矩阵•Regression - 回归1)Regression Analysis - 回归分析2)Linear Regression - 线性回归3)Multiple Regression - 多元回归4)Polynomial Regression - 多项式回归5)Logistic Regression - 逻辑回归6)Ridge Regression - 岭回归7)Lasso Regression - Lasso回归8)Elastic Net Regression - 弹性网络回归9)Regression Coefficients - 回归系数10)Residuals - 残差11)Ordinary Least Squares (OLS) - 普通最小二乘法12)Ridge Regression Coefficient - 岭回归系数13)Lasso Regression Coefficient - Lasso回归系数14)Elastic Net Regression Coefficient - 弹性网络回归系数15)Regression Line - 回归线16)Prediction Error - 预测误差17)Regression Model - 回归模型18)Nonlinear Regression - 非线性回归19)Generalized Linear Models (GLM) - 广义线性模型20)Coefficient of Determination (R-squared) - 决定系数21)F-test - F检验22)Homoscedasticity - 同方差性23)Heteroscedasticity - 异方差性24)Autocorrelation - 自相关25)Multicollinearity - 多重共线性26)Outliers - 异常值27)Cross-validation - 交叉验证28)Feature Selection - 特征选择29)Feature Engineering - 特征工程30)Regularization - 正则化2.Neural Networks and Deep Learning (神经网络与深度学习)•Convolutional Neural Network (CNN) - 卷积神经网络1)Convolutional Neural Network (CNN) - 卷积神经网络2)Convolution Layer - 卷积层3)Feature Map - 特征图4)Convolution Operation - 卷积操作5)Stride - 步幅6)Padding - 填充7)Pooling Layer - 池化层8)Max Pooling - 最大池化9)Average Pooling - 平均池化10)Fully Connected Layer - 全连接层11)Activation Function - 激活函数12)Rectified Linear Unit (ReLU) - 线性修正单元13)Dropout - 随机失活14)Batch Normalization - 批量归一化15)Transfer Learning - 迁移学习16)Fine-Tuning - 微调17)Image Classification - 图像分类18)Object Detection - 物体检测19)Semantic Segmentation - 语义分割20)Instance Segmentation - 实例分割21)Generative Adversarial Network (GAN) - 生成对抗网络22)Image Generation - 图像生成23)Style Transfer - 风格迁移24)Convolutional Autoencoder - 卷积自编码器25)Recurrent Neural Network (RNN) - 循环神经网络•Recurrent Neural Network (RNN) - 循环神经网络1)Recurrent Neural Network (RNN) - 循环神经网络2)Long Short-Term Memory (LSTM) - 长短期记忆网络3)Gated Recurrent Unit (GRU) - 门控循环单元4)Sequence Modeling - 序列建模5)Time Series Prediction - 时间序列预测6)Natural Language Processing (NLP) - 自然语言处理7)Text Generation - 文本生成8)Sentiment Analysis - 情感分析9)Named Entity Recognition (NER) - 命名实体识别10)Part-of-Speech Tagging (POS Tagging) - 词性标注11)Sequence-to-Sequence (Seq2Seq) - 序列到序列12)Attention Mechanism - 注意力机制13)Encoder-Decoder Architecture - 编码器-解码器架构14)Bidirectional RNN - 双向循环神经网络15)Teacher Forcing - 强制教师法16)Backpropagation Through Time (BPTT) - 通过时间的反向传播17)Vanishing Gradient Problem - 梯度消失问题18)Exploding Gradient Problem - 梯度爆炸问题19)Language Modeling - 语言建模20)Speech Recognition - 语音识别•Long Short-Term Memory (LSTM) - 长短期记忆网络1)Long Short-Term Memory (LSTM) - 长短期记忆网络2)Cell State - 细胞状态3)Hidden State - 隐藏状态4)Forget Gate - 遗忘门5)Input Gate - 输入门6)Output Gate - 输出门7)Peephole Connections - 窥视孔连接8)Gated Recurrent Unit (GRU) - 门控循环单元9)Vanishing Gradient Problem - 梯度消失问题10)Exploding Gradient Problem - 梯度爆炸问题11)Sequence Modeling - 序列建模12)Time Series Prediction - 时间序列预测13)Natural Language Processing (NLP) - 自然语言处理14)Text Generation - 文本生成15)Sentiment Analysis - 情感分析16)Named Entity Recognition (NER) - 命名实体识别17)Part-of-Speech Tagging (POS Tagging) - 词性标注18)Attention Mechanism - 注意力机制19)Encoder-Decoder Architecture - 编码器-解码器架构20)Bidirectional LSTM - 双向长短期记忆网络•Attention Mechanism - 注意力机制1)Attention Mechanism - 注意力机制2)Self-Attention - 自注意力3)Multi-Head Attention - 多头注意力4)Transformer - 变换器5)Query - 查询6)Key - 键7)Value - 值8)Query-Value Attention - 查询-值注意力9)Dot-Product Attention - 点积注意力10)Scaled Dot-Product Attention - 缩放点积注意力11)Additive Attention - 加性注意力12)Context Vector - 上下文向量13)Attention Score - 注意力分数14)SoftMax Function - SoftMax函数15)Attention Weight - 注意力权重16)Global Attention - 全局注意力17)Local Attention - 局部注意力18)Positional Encoding - 位置编码19)Encoder-Decoder Attention - 编码器-解码器注意力20)Cross-Modal Attention - 跨模态注意力•Generative Adversarial Network (GAN) - 生成对抗网络1)Generative Adversarial Network (GAN) - 生成对抗网络2)Generator - 生成器3)Discriminator - 判别器4)Adversarial Training - 对抗训练5)Minimax Game - 极小极大博弈6)Nash Equilibrium - 纳什均衡7)Mode Collapse - 模式崩溃8)Training Stability - 训练稳定性9)Loss Function - 损失函数10)Discriminative Loss - 判别损失11)Generative Loss - 生成损失12)Wasserstein GAN (WGAN) - Wasserstein GAN(WGAN)13)Deep Convolutional GAN (DCGAN) - 深度卷积生成对抗网络(DCGAN)14)Conditional GAN (c GAN) - 条件生成对抗网络(c GAN)15)Style GAN - 风格生成对抗网络16)Cycle GAN - 循环生成对抗网络17)Progressive Growing GAN (PGGAN) - 渐进式增长生成对抗网络(PGGAN)18)Self-Attention GAN (SAGAN) - 自注意力生成对抗网络(SAGAN)19)Big GAN - 大规模生成对抗网络20)Adversarial Examples - 对抗样本•Encoder-Decoder - 编码器-解码器1)Encoder-Decoder Architecture - 编码器-解码器架构2)Encoder - 编码器3)Decoder - 解码器4)Sequence-to-Sequence Model (Seq2Seq) - 序列到序列模型5)State Vector - 状态向量6)Context Vector - 上下文向量7)Hidden State - 隐藏状态8)Attention Mechanism - 注意力机制9)Teacher Forcing - 强制教师法10)Beam Search - 束搜索11)Recurrent Neural Network (RNN) - 循环神经网络12)Long Short-Term Memory (LSTM) - 长短期记忆网络13)Gated Recurrent Unit (GRU) - 门控循环单元14)Bidirectional Encoder - 双向编码器15)Greedy Decoding - 贪婪解码16)Masking - 遮盖17)Dropout - 随机失活18)Embedding Layer - 嵌入层19)Cross-Entropy Loss - 交叉熵损失20)Tokenization - 令牌化•Transfer Learning - 迁移学习1)Transfer Learning - 迁移学习2)Source Domain - 源领域3)Target Domain - 目标领域4)Fine-Tuning - 微调5)Domain Adaptation - 领域自适应6)Pre-Trained Model - 预训练模型7)Feature Extraction - 特征提取8)Knowledge Transfer - 知识迁移9)Unsupervised Domain Adaptation - 无监督领域自适应10)Semi-Supervised Domain Adaptation - 半监督领域自适应11)Multi-Task Learning - 多任务学习12)Data Augmentation - 数据增强13)Task Transfer - 任务迁移14)Model Agnostic Meta-Learning (MAML) - 与模型无关的元学习(MAML)15)One-Shot Learning - 单样本学习16)Zero-Shot Learning - 零样本学习17)Few-Shot Learning - 少样本学习18)Knowledge Distillation - 知识蒸馏19)Representation Learning - 表征学习20)Adversarial Transfer Learning - 对抗迁移学习•Pre-trained Models - 预训练模型1)Pre-trained Model - 预训练模型2)Transfer Learning - 迁移学习3)Fine-Tuning - 微调4)Knowledge Transfer - 知识迁移5)Domain Adaptation - 领域自适应6)Feature Extraction - 特征提取7)Representation Learning - 表征学习8)Language Model - 语言模型9)Bidirectional Encoder Representations from Transformers (BERT) - 双向编码器结构转换器10)Generative Pre-trained Transformer (GPT) - 生成式预训练转换器11)Transformer-based Models - 基于转换器的模型12)Masked Language Model (MLM) - 掩蔽语言模型13)Cloze Task - 填空任务14)Tokenization - 令牌化15)Word Embeddings - 词嵌入16)Sentence Embeddings - 句子嵌入17)Contextual Embeddings - 上下文嵌入18)Self-Supervised Learning - 自监督学习19)Large-Scale Pre-trained Models - 大规模预训练模型•Loss Function - 损失函数1)Loss Function - 损失函数2)Mean Squared Error (MSE) - 均方误差3)Mean Absolute Error (MAE) - 平均绝对误差4)Cross-Entropy Loss - 交叉熵损失5)Binary Cross-Entropy Loss - 二元交叉熵损失6)Categorical Cross-Entropy Loss - 分类交叉熵损失7)Hinge Loss - 合页损失8)Huber Loss - Huber损失9)Wasserstein Distance - Wasserstein距离10)Triplet Loss - 三元组损失11)Contrastive Loss - 对比损失12)Dice Loss - Dice损失13)Focal Loss - 焦点损失14)GAN Loss - GAN损失15)Adversarial Loss - 对抗损失16)L1 Loss - L1损失17)L2 Loss - L2损失18)Huber Loss - Huber损失19)Quantile Loss - 分位数损失•Activation Function - 激活函数1)Activation Function - 激活函数2)Sigmoid Function - Sigmoid函数3)Hyperbolic Tangent Function (Tanh) - 双曲正切函数4)Rectified Linear Unit (Re LU) - 矩形线性单元5)Parametric Re LU (P Re LU) - 参数化Re LU6)Exponential Linear Unit (ELU) - 指数线性单元7)Swish Function - Swish函数8)Softplus Function - Soft plus函数9)Softmax Function - SoftMax函数10)Hard Tanh Function - 硬双曲正切函数11)Softsign Function - Softsign函数12)GELU (Gaussian Error Linear Unit) - GELU(高斯误差线性单元)13)Mish Function - Mish函数14)CELU (Continuous Exponential Linear Unit) - CELU(连续指数线性单元)15)Bent Identity Function - 弯曲恒等函数16)Gaussian Error Linear Units (GELUs) - 高斯误差线性单元17)Adaptive Piecewise Linear (APL) - 自适应分段线性函数18)Radial Basis Function (RBF) - 径向基函数•Backpropagation - 反向传播1)Backpropagation - 反向传播2)Gradient Descent - 梯度下降3)Partial Derivative - 偏导数4)Chain Rule - 链式法则5)Forward Pass - 前向传播6)Backward Pass - 反向传播7)Computational Graph - 计算图8)Neural Network - 神经网络9)Loss Function - 损失函数10)Gradient Calculation - 梯度计算11)Weight Update - 权重更新12)Activation Function - 激活函数13)Optimizer - 优化器14)Learning Rate - 学习率15)Mini-Batch Gradient Descent - 小批量梯度下降16)Stochastic Gradient Descent (SGD) - 随机梯度下降17)Batch Gradient Descent - 批量梯度下降18)Momentum - 动量19)Adam Optimizer - Adam优化器20)Learning Rate Decay - 学习率衰减•Gradient Descent - 梯度下降1)Gradient Descent - 梯度下降2)Stochastic Gradient Descent (SGD) - 随机梯度下降3)Mini-Batch Gradient Descent - 小批量梯度下降4)Batch Gradient Descent - 批量梯度下降5)Learning Rate - 学习率6)Momentum - 动量7)Adaptive Moment Estimation (Adam) - 自适应矩估计8)RMSprop - 均方根传播9)Learning Rate Schedule - 学习率调度10)Convergence - 收敛11)Divergence - 发散12)Adagrad - 自适应学习速率方法13)Adadelta - 自适应增量学习率方法14)Adamax - 自适应矩估计的扩展版本15)Nadam - Nesterov Accelerated Adaptive Moment Estimation16)Learning Rate Decay - 学习率衰减17)Step Size - 步长18)Conjugate Gradient Descent - 共轭梯度下降19)Line Search - 线搜索20)Newton's Method - 牛顿法•Learning Rate - 学习率1)Learning Rate - 学习率2)Adaptive Learning Rate - 自适应学习率3)Learning Rate Decay - 学习率衰减4)Initial Learning Rate - 初始学习率5)Step Size - 步长6)Momentum - 动量7)Exponential Decay - 指数衰减8)Annealing - 退火9)Cyclical Learning Rate - 循环学习率10)Learning Rate Schedule - 学习率调度11)Warm-up - 预热12)Learning Rate Policy - 学习率策略13)Learning Rate Annealing - 学习率退火14)Cosine Annealing - 余弦退火15)Gradient Clipping - 梯度裁剪16)Adapting Learning Rate - 适应学习率17)Learning Rate Multiplier - 学习率倍增器18)Learning Rate Reduction - 学习率降低19)Learning Rate Update - 学习率更新20)Scheduled Learning Rate - 定期学习率•Batch Size - 批量大小1)Batch Size - 批量大小2)Mini-Batch - 小批量3)Batch Gradient Descent - 批量梯度下降4)Stochastic Gradient Descent (SGD) - 随机梯度下降5)Mini-Batch Gradient Descent - 小批量梯度下降6)Online Learning - 在线学习7)Full-Batch - 全批量8)Data Batch - 数据批次9)Training Batch - 训练批次10)Batch Normalization - 批量归一化11)Batch-wise Optimization - 批量优化12)Batch Processing - 批量处理13)Batch Sampling - 批量采样14)Adaptive Batch Size - 自适应批量大小15)Batch Splitting - 批量分割16)Dynamic Batch Size - 动态批量大小17)Fixed Batch Size - 固定批量大小18)Batch-wise Inference - 批量推理19)Batch-wise Training - 批量训练20)Batch Shuffling - 批量洗牌•Epoch - 训练周期1)Training Epoch - 训练周期2)Epoch Size - 周期大小3)Early Stopping - 提前停止4)Validation Set - 验证集5)Training Set - 训练集6)Test Set - 测试集7)Overfitting - 过拟合8)Underfitting - 欠拟合9)Model Evaluation - 模型评估10)Model Selection - 模型选择11)Hyperparameter Tuning - 超参数调优12)Cross-Validation - 交叉验证13)K-fold Cross-Validation - K折交叉验证14)Stratified Cross-Validation - 分层交叉验证15)Leave-One-Out Cross-Validation (LOOCV) - 留一法交叉验证16)Grid Search - 网格搜索17)Random Search - 随机搜索18)Model Complexity - 模型复杂度19)Learning Curve - 学习曲线20)Convergence - 收敛3.Machine Learning Techniques and Algorithms (机器学习技术与算法)•Decision Tree - 决策树1)Decision Tree - 决策树2)Node - 节点3)Root Node - 根节点4)Leaf Node - 叶节点5)Internal Node - 内部节点6)Splitting Criterion - 分裂准则7)Gini Impurity - 基尼不纯度8)Entropy - 熵9)Information Gain - 信息增益10)Gain Ratio - 增益率11)Pruning - 剪枝12)Recursive Partitioning - 递归分割13)CART (Classification and Regression Trees) - 分类回归树14)ID3 (Iterative Dichotomiser 3) - 迭代二叉树315)C4.5 (successor of ID3) - C4.5(ID3的后继者)16)C5.0 (successor of C4.5) - C5.0(C4.5的后继者)17)Split Point - 分裂点18)Decision Boundary - 决策边界19)Pruned Tree - 剪枝后的树20)Decision Tree Ensemble - 决策树集成•Random Forest - 随机森林1)Random Forest - 随机森林2)Ensemble Learning - 集成学习3)Bootstrap Sampling - 自助采样4)Bagging (Bootstrap Aggregating) - 装袋法5)Out-of-Bag (OOB) Error - 袋外误差6)Feature Subset - 特征子集7)Decision Tree - 决策树8)Base Estimator - 基础估计器9)Tree Depth - 树深度10)Randomization - 随机化11)Majority Voting - 多数投票12)Feature Importance - 特征重要性13)OOB Score - 袋外得分14)Forest Size - 森林大小15)Max Features - 最大特征数16)Min Samples Split - 最小分裂样本数17)Min Samples Leaf - 最小叶节点样本数18)Gini Impurity - 基尼不纯度19)Entropy - 熵20)Variable Importance - 变量重要性•Support Vector Machine (SVM) - 支持向量机1)Support Vector Machine (SVM) - 支持向量机2)Hyperplane - 超平面3)Kernel Trick - 核技巧4)Kernel Function - 核函数5)Margin - 间隔6)Support Vectors - 支持向量7)Decision Boundary - 决策边界8)Maximum Margin Classifier - 最大间隔分类器9)Soft Margin Classifier - 软间隔分类器10) C Parameter - C参数11)Radial Basis Function (RBF) Kernel - 径向基函数核12)Polynomial Kernel - 多项式核13)Linear Kernel - 线性核14)Quadratic Kernel - 二次核15)Gaussian Kernel - 高斯核16)Regularization - 正则化17)Dual Problem - 对偶问题18)Primal Problem - 原始问题19)Kernelized SVM - 核化支持向量机20)Multiclass SVM - 多类支持向量机•K-Nearest Neighbors (KNN) - K-最近邻1)K-Nearest Neighbors (KNN) - K-最近邻2)Nearest Neighbor - 最近邻3)Distance Metric - 距离度量4)Euclidean Distance - 欧氏距离5)Manhattan Distance - 曼哈顿距离6)Minkowski Distance - 闵可夫斯基距离7)Cosine Similarity - 余弦相似度8)K Value - K值9)Majority Voting - 多数投票10)Weighted KNN - 加权KNN11)Radius Neighbors - 半径邻居12)Ball Tree - 球树13)KD Tree - KD树14)Locality-Sensitive Hashing (LSH) - 局部敏感哈希15)Curse of Dimensionality - 维度灾难16)Class Label - 类标签17)Training Set - 训练集18)Test Set - 测试集19)Validation Set - 验证集20)Cross-Validation - 交叉验证•Naive Bayes - 朴素贝叶斯1)Naive Bayes - 朴素贝叶斯2)Bayes' Theorem - 贝叶斯定理3)Prior Probability - 先验概率4)Posterior Probability - 后验概率5)Likelihood - 似然6)Class Conditional Probability - 类条件概率7)Feature Independence Assumption - 特征独立假设8)Multinomial Naive Bayes - 多项式朴素贝叶斯9)Gaussian Naive Bayes - 高斯朴素贝叶斯10)Bernoulli Naive Bayes - 伯努利朴素贝叶斯11)Laplace Smoothing - 拉普拉斯平滑12)Add-One Smoothing - 加一平滑13)Maximum A Posteriori (MAP) - 最大后验概率14)Maximum Likelihood Estimation (MLE) - 最大似然估计15)Classification - 分类16)Feature Vectors - 特征向量17)Training Set - 训练集18)Test Set - 测试集19)Class Label - 类标签20)Confusion Matrix - 混淆矩阵•Clustering - 聚类1)Clustering - 聚类2)Centroid - 质心3)Cluster Analysis - 聚类分析4)Partitioning Clustering - 划分式聚类5)Hierarchical Clustering - 层次聚类6)Density-Based Clustering - 基于密度的聚类7)K-Means Clustering - K均值聚类8)K-Medoids Clustering - K中心点聚类9)DBSCAN (Density-Based Spatial Clustering of Applications with Noise) - 基于密度的空间聚类算法10)Agglomerative Clustering - 聚合式聚类11)Dendrogram - 系统树图12)Silhouette Score - 轮廓系数13)Elbow Method - 肘部法则14)Clustering Validation - 聚类验证15)Intra-cluster Distance - 类内距离16)Inter-cluster Distance - 类间距离17)Cluster Cohesion - 类内连贯性18)Cluster Separation - 类间分离度19)Cluster Assignment - 聚类分配20)Cluster Label - 聚类标签•K-Means - K-均值1)K-Means - K-均值2)Centroid - 质心3)Cluster - 聚类4)Cluster Center - 聚类中心5)Cluster Assignment - 聚类分配6)Cluster Analysis - 聚类分析7)K Value - K值8)Elbow Method - 肘部法则9)Inertia - 惯性10)Silhouette Score - 轮廓系数11)Convergence - 收敛12)Initialization - 初始化13)Euclidean Distance - 欧氏距离14)Manhattan Distance - 曼哈顿距离15)Distance Metric - 距离度量16)Cluster Radius - 聚类半径17)Within-Cluster Variation - 类内变异18)Cluster Quality - 聚类质量19)Clustering Algorithm - 聚类算法20)Clustering Validation - 聚类验证•Dimensionality Reduction - 降维1)Dimensionality Reduction - 降维2)Feature Extraction - 特征提取3)Feature Selection - 特征选择4)Principal Component Analysis (PCA) - 主成分分析5)Singular Value Decomposition (SVD) - 奇异值分解6)Linear Discriminant Analysis (LDA) - 线性判别分析7)t-Distributed Stochastic Neighbor Embedding (t-SNE) - t-分布随机邻域嵌入8)Autoencoder - 自编码器9)Manifold Learning - 流形学习10)Locally Linear Embedding (LLE) - 局部线性嵌入11)Isomap - 等度量映射12)Uniform Manifold Approximation and Projection (UMAP) - 均匀流形逼近与投影13)Kernel PCA - 核主成分分析14)Non-negative Matrix Factorization (NMF) - 非负矩阵分解15)Independent Component Analysis (ICA) - 独立成分分析16)Variational Autoencoder (VAE) - 变分自编码器17)Sparse Coding - 稀疏编码18)Random Projection - 随机投影19)Neighborhood Preserving Embedding (NPE) - 保持邻域结构的嵌入20)Curvilinear Component Analysis (CCA) - 曲线成分分析•Principal Component Analysis (PCA) - 主成分分析1)Principal Component Analysis (PCA) - 主成分分析2)Eigenvector - 特征向量3)Eigenvalue - 特征值4)Covariance Matrix - 协方差矩阵。
机器人智能算法与应用考核试卷

C.遗传算法
D.强化学习
9.下列哪种方法不适合用于机器人抓取?()
A.位置控制
B.力控制
C.速度控制
D.视觉伺服
10.下列哪种算法主要用于机器人的状态估计?()
A.卡尔曼滤波
B.滑动平均滤波
C.高斯滤波
D.中值滤波
11.下列哪种技术不属于机器人视觉导航?()
A.地图构建
B.路径规划
C.传感器融合
A. SIFT
B. SURF
C. HOG
D. PCA
8.以下哪些算法可以用于增强学习?()
A. Q学习
B.深度Q网络
C.策略梯度
D.支持向量机
9.在机器人控制中,以下哪些属于自适应控制方法?()
A.模糊控制
B.遗传算法
C.神经网络控制
D.滑模控制
10.以下哪些方法可以用于机器人抓取物体的姿态估计?()
()
标准答案
一、单项选择题
1. D
2. D
3. C
4. C
5. D
6. C
7. D
8. D
9. D
10. A
11. D
12. D
13. A
14. D
15. D
16. A
17. D
D
19. C
20. D
二、多选题
1. ABD
2. ABCD
3. AB
4. ABC
5. ABC
6. ACD
7. ABC
1.机器学习中的监督学习算法不需要标注数据。()
2.深度学习中,卷积神经网络主要应用于图像处理领域。()
3.在机器人的路径规划中,Dijkstra算法总是能找到最短路径。()
机器人的AUTOML技术和应用
机器人的AUTOML技术和应用随着人工智能技术的飞速发展,机器人也逐渐普及到人们的生活中。
在机器人的开发中,自动机器学习(Automatic Machine Learning,简称AutoML)技术得到了广泛的应用。
AutoML技术可以大大简化机器学习的流程,提高机器学习的效率和精度,使机器人的应用更加便捷和实用化。
一、AutoML技术的基本概念AutoML技术是一种自动优化和配置机器学习模型的技术。
它通常包括数据预处理、模型选择和模型调整等阶段,通过自动优化这些过程,以达到最优的机器学习模型。
AutoML技术的核心是算法自动化优化。
其主要目的是消除机器学习上的技术门槛,让更多的人可以使用人工智能技术。
二、AutoML技术在机器人中的应用1. 语音识别语音识别是机器人必不可少的功能之一,它可以帮助机器人与人类交互。
AutoML技术可以自动优化语音识别的算法,提高识别准确率和响应速度。
在机器人应用中,语音识别可以实现人机对话的交互方式,为用户提供便捷的服务。
2. 自动驾驶自动驾驶是机器人领域最受关注的一个方向。
AutoML技术可以自动优化自动驾驶的算法,提高车辆的安全性和驾驶体验。
在机器人应用中,自动驾驶可以给交通出行带来极大的方便和安全性,使出行更加智能。
3. 机器视觉机器视觉是机器人重要功能之一,它可以实现对周围环境的感知和分析。
AutoML技术可以自动优化图像识别的算法,实现时间和精度的平衡。
在机器人应用中,机器视觉可以帮助机器人更好地了解周围的环境,提供更加精准的服务。
三、AutoML技术在机器人领域的优势1. 提高效率和准确率。
AutoML技术可以自动化机器学习的流程,实现从数据清洗到模型选择再到超参数调整的端到端自动优化。
由此,可以让机器学习变得更快、更准确。
2. 支持人机交互。
AutoML技术可以帮助机器人更好地实现人机交互,例如机器视觉、语音识别等技术,可以让机器人与人之间更加自然地交互。
基于大模型的具身智能系统综述

基于大模型的具身智能系统综述目录1. 内容概要 (2)1.1 研究背景 (2)1.2 具身智能系统的概念 (4)1.3 大模型在具身智能中的应用 (5)2. 具身智能系统的发展历程 (7)2.1 早期研究 (8)2.2 现代研究 (10)2.3 未来发展趋势 (11)3. 大模型在具身智能系统中的应用 (13)3.1 模型选择 (14)3.2 数据处理与生成 (15)3.3 模型训练与优化 (17)3.4 应用实例 (19)4. 具身智能系统的关键技术 (21)4.1 感知与理解 (22)4.2 运动规划与控制 (23)4.3 多模态交互 (25)4.4 自主学习与适应 (26)5. 应用领域 (27)5.1 医疗领域 (29)5.2 教育领域 (30)5.3 服务业 (32)5.4 制造业 (33)6. 面临的挑战与未来展望 (34)6.1 安全性与隐私 (36)6.2 成本与资源消耗 (37)6.3 道德与社会影响 (39)6.4 技术合作与发展 (39)1. 内容概要随着人工智能技术的迅猛发展,大模型及具身智能系统逐渐成为研究热点。
本综述旨在全面、深入地探讨基于大模型的具身智能系统的研究现状、技术挑战与未来发展方向。
我们将回顾大模型在具身智能系统中的应用背景和基本原理,包括强化学习、知识蒸馏等关键技术在大模型上的应用。
我们将重点分析当前具身智能系统的最新进展,如自动驾驶、智能机器人等领域的实践案例,并从感知、决策、控制等方面评估其性能。
我们还将讨论大模型具身智能系统面临的主要技术挑战,如数据质量、模型泛化能力、计算资源限制等问题。
针对这些挑战,我们将提出可能的解决方案和未来研究方向。
我们将展望具身智能系统的未来发展趋势,包括跨模态融合、多智能体协同、隐私保护等方面的探索。
通过本综述,我们期望为相关领域的研究人员和工程技术人员提供有价值的参考信息,共同推动具身智能系统的进步与发展。
1.1 研究背景随着人工智能和机器学习领域的迅猛发展,特别是深度学习技术和大模型的广泛应用,智能系统的能力得到了极大的提升。
深度强化学习在自动驾驶中的应用研究(英文中文双语版优质文档)
深度强化学习在自动驾驶中的应用研究(英文中文双语版优质文档)Application Research of Deep Reinforcement Learning in Autonomous DrivingWith the continuous development and progress of artificial intelligence technology, autonomous driving technology has become one of the research hotspots in the field of intelligent transportation. In the research of autonomous driving technology, deep reinforcement learning, as an emerging artificial intelligence technology, is increasingly widely used in the field of autonomous driving. This paper will explore the application research of deep reinforcement learning in autonomous driving.1. Introduction to Deep Reinforcement LearningDeep reinforcement learning is a machine learning method based on reinforcement learning, which enables machines to intelligently acquire knowledge and experience from the external environment, so that they can better complete tasks. The basic framework of deep reinforcement learning is to use the deep learning network to learn the mapping of state and action. Through continuous interaction with the environment, the machine can learn the optimal strategy, thereby realizing the automation of tasks.The application of deep reinforcement learning in the field of automatic driving is to realize the automation of driving decisions through machine learning, so as to realize intelligent driving.2. Application of Deep Reinforcement Learning in Autonomous Driving1. State recognition in autonomous drivingIn autonomous driving, state recognition is a very critical step, which mainly obtains the state information of the environment through sensors and converts it into data that the computer can understand. Traditional state recognition methods are mainly based on rules and feature engineering, but this method not only requires human participation, but also has low accuracy for complex environmental state recognition. Therefore, the state recognition method based on deep learning has gradually become the mainstream method in automatic driving.The deep learning network can perform feature extraction and classification recognition on images and videos collected by sensors through methods such as convolutional neural networks, thereby realizing state recognition for complex environments.2. Decision making in autonomous drivingDecision making in autonomous driving refers to the process of formulating an optimal driving strategy based on the state information acquired by sensors, as well as the goals and constraints of the driving task. In deep reinforcement learning, machines can learn optimal strategies by interacting with the environment, enabling decision making in autonomous driving.The decision-making process of deep reinforcement learning mainly includes two aspects: one is the learning of the state-value function, which is used to evaluate the value of the current state; the other is the learning of the policy function, which is used to select the optimal action. In deep reinforcement learning, the machine can learn the state-value function and policy function through the interaction with the environment, so as to realize the automation of driving decision-making.3. Behavior Planning in Autonomous DrivingBehavior planning in autonomous driving refers to selecting an optimal behavior from all possible behaviors based on the current state information and the goal of the driving task. In deep reinforcement learning, machines can learn optimal strategies for behavior planning in autonomous driving.4. Path Planning in Autonomous DrivingPath planning in autonomous driving refers to selecting the optimal driving path according to the goals and constraints of the driving task. In deep reinforcement learning, machines can learn optimal strategies for path planning in autonomous driving.3. Advantages and challenges of deep reinforcement learning in autonomous driving1. AdvantagesDeep reinforcement learning has the following advantages in autonomous driving:(1) It can automatically complete tasks such as driving decision-making, behavior planning, and path planning, reducing manual participation and improving driving efficiency and safety.(2) The deep learning network can perform feature extraction and classification recognition on the images and videos collected by the sensor, so as to realize the state recognition of complex environments.(3) Deep reinforcement learning can learn the optimal strategy through the interaction with the environment, so as to realize the tasks of decision making, behavior planning and path planning in automatic driving.2. ChallengeDeep reinforcement learning also presents some challenges in autonomous driving:(1) Insufficient data: Deep reinforcement learning requires a large amount of data for training, but in the field of autonomous driving, it is very difficult to obtain large-scale driving data.(2) Safety: The safety of autonomous driving technology is an important issue, because once an accident occurs, its consequences will be unpredictable. Therefore, the use of deep reinforcement learning in autonomous driving requires very strict safety safeguards.(3) Interpretation performance: Deep reinforcement learning requires a lot of computing resources and time for training and optimization. Therefore, in practical applications, the problems of computing performance and time cost need to be considered.(4) Interpretability: Deep reinforcement learning models are usually black-box models, and their decision-making process is difficult to understand and explain, which will have a negative impact on the reliability and safety of autonomous driving systems. Therefore, how to improve the interpretability of deep reinforcement learning models is an important research direction.(5) Generalization ability: In the field of autonomous driving, vehicles are faced with various environments and situations. Therefore, the deep reinforcement learning model needs to have a strong generalization ability in order to be able to accurately and Safe decision-making and planning.In summary, deep reinforcement learning has great application potential in autonomous driving, but challenges such as data scarcity, safety, interpretability, computational performance, and generalization capabilities need to be addressed. Future research should address these issues and promote the development and application of deep reinforcement learning in the field of autonomous driving.深度强化学习在自动驾驶中的应用研究随着人工智能技术的不断发展和进步,自动驾驶技术已经成为了当前智能交通领域中的研究热点之一。
参考文献(人工智能)

参考文献(人工智能)曹晖目的:对参考文献整理(包括摘要、读书笔记等),方便以后的使用。
分类:粗分为论文(paper)、教程(tutorial)和文摘(digest)。
0介绍 (1)1系统与综述 (1)2神经网络 (2)3机器学习 (2)3.1联合训练的有效性和可用性分析 (2)3.2文本学习工作的引导 (2)3.3★采用机器学习技术来构造受限领域搜索引擎 (3)3.4联合训练来合并标识数据与未标识数据 (5)3.5在超文本学习中应用统计和关系方法 (5)3.6在关系领域发现测试集合规律性 (6)3.7网页挖掘的一阶学习 (6)3.8从多语种文本数据库中学习单语种语言模型 (6)3.9从因特网中学习以构造知识库 (7)3.10未标识数据在有指导学习中的角色 (8)3.11使用增强学习来有效爬行网页 (8)3.12★文本学习和相关智能A GENTS:综述 (9)3.13★新事件检测和跟踪的学习方法 (15)3.14★信息检索中的机器学习——神经网络,符号学习和遗传算法 (15)3.15用NLP来对用户特征进行机器学习 (15)4模式识别 (16)4.1JA VA中的模式处理 (16)0介绍1系统与综述2神经网络3机器学习3.1 联合训练的有效性和可用性分析标题:Analyzing the Effectiveness and Applicability of Co-training链接:Papers 论文集\AI 人工智能\Machine Learning 机器学习\Analyzing the Effectiveness and Applicability of Co-training.ps作者:Kamal Nigam, Rayid Ghani备注:Kamal Nigam (School of Computer Science, Carnegie Mellon University, Pittsburgh, PA 15213, knigam@)Rayid Ghani (School of Computer Science, Carnegie Mellon University, Pittsburgh, PA 15213 rayid@)摘要:Recently there has been significant interest in supervised learning algorithms that combine labeled and unlabeled data for text learning tasks. The co-training setting [1] applies todatasets that have a natural separation of their features into two disjoint sets. We demonstrate that when learning from labeled and unlabeled data, algorithms explicitly leveraging a natural independent split of the features outperform algorithms that do not. When a natural split does not exist, co-training algorithms that manufacture a feature split may out-perform algorithms not using a split. These results help explain why co-training algorithms are both discriminativein nature and robust to the assumptions of their embedded classifiers.3.2 文本学习工作的引导标题:Bootstrapping for Text Learning Tasks链接:Papers 论文集\AI 人工智能\Machine Learning 机器学习\Bootstrap for Text Learning Tasks.ps作者:Rosie Jones, Andrew McCallum, Kamal Nigam, Ellen Riloff备注:Rosie Jones (rosie@, 1 School of Computer Science, Carnegie Mellon University, Pittsburgh, PA 15213)Andrew McCallum (mccallum@, 2 Just Research, 4616 Henry Street, Pittsburgh, PA 15213)Kamal Nigam (knigam@)Ellen Riloff (riloff@, Department of Computer Science, University of Utah, Salt Lake City, UT 84112)摘要:When applying text learning algorithms to complex tasks, it is tedious and expensive to hand-label the large amounts of training data necessary for good performance. This paper presents bootstrapping as an alternative approach to learning from large sets of labeled data. Instead of a large quantity of labeled data, this paper advocates using a small amount of seed information and alarge collection of easily-obtained unlabeled data. Bootstrapping initializes a learner with the seed information; it then iterates, applying the learner to calculate labels for the unlabeled data, and incorporating some of these labels into the training input for the learner. Two case studies of this approach are presented. Bootstrapping for information extraction provides 76% precision for a 250-word dictionary for extracting locations from web pages, when starting with just a few seed locations. Bootstrapping a text classifier from a few keywords per class and a class hierarchy provides accuracy of 66%, a level close to human agreement, when placing computer science research papers into a topic hierarchy. The success of these two examples argues for the strength of the general bootstrapping approach for text learning tasks.3.3 ★采用机器学习技术来构造受限领域搜索引擎标题:Building Domain-specific Search Engines with Machine Learning Techniques链接:Papers 论文集\AI 人工智能\Machine Learning 机器学习\Building Domain-Specific Search Engines with Machine Learning Techniques.ps作者:Andrew McCallum, Kamal Nigam, Jason Rennie, Kristie Seymore备注:Andrew McCallum (mccallum@ , Just Research, 4616 Henry Street Pittsburgh, PA 15213)Kamal Nigam (knigam@ , School of Computer Science, Carnegie Mellon University Pittsburgh, PA 15213)Jason Rennie (jr6b@)Kristie Seymore (kseymore@)摘要:Domain-specific search engines are growing in popularity because they offer increased accuracy and extra functionality not possible with the general, Web-wide search engines. For example, allows complex queries by age-group, size, location and cost over summer camps. Unfortunately these domain-specific search engines are difficult and time-consuming to maintain. This paper proposes the use of machine learning techniques to greatly automate the creation and maintenance of domain-specific search engines. We describe new research in reinforcement learning, information extraction and text classification that enables efficient spidering, identifying informative text segments, and populating topic hierarchies. Using these techniques, we have built a demonstration system: a search engine forcomputer science research papers. It already contains over 50,000 papers and is publicly available at ....采用多项Naive Bayes 文本分类模型。
TensorFlow和自动机器学习(AutoML)
TensorFlow和自动机器学习(AutoML)TensorFlow是一个开源的机器学习框架,它提供了丰富的工具和库,帮助研究人员和开发者设计、构建和训练各种机器学习模型。
而自动机器学习(AutoML)则是一种旨在简化机器学习流程的方法,通过自动化和自动化工具来减少人工干预,从而更高效地构建和应用机器学习模型。
本文将介绍TensorFlow和自动机器学习的概念和应用,并探讨它们在现代科技发展中的重要性。
一、TensorFlow简介TensorFlow 是一个由Google Brain团队开发的开源框架,可用于各种机器学习任务,包括图像和语音识别、自然语言处理、强化学习等。
它的核心是一个基于数据流图的编程模型,通过在节点之间传递张量(tensors)来表示数学操作。
TensorFlow提供了一种灵活且高效的方式,使开发人员能够轻松构建、训练和部署机器学习模型。
1.1 TensorFlow的特性TensorFlow具有许多强大的特性,使其成为机器学习领域的热门工具之一。
首先,TensorFlow提供了一个易于使用的Python API,使开发人员能够在Python环境中方便地进行模型开发和调试。
此外,它还支持多种编程语言,包括C++、Java和Go,为机器学习任务的灵活性和可扩展性提供了支持。
其次,TensorFlow具有分布式计算的能力,可在多个设备和多个计算节点上进行模型训练和推断。
这使得在大规模数据集和复杂模型上进行高性能计算成为可能。
另外,TensorFlow提供了一个可视化的工具,称为TensorBoard,用于可视化模型的结构和训练过程。
通过TensorBoard,用户可以轻松地监视模型的性能和调试潜在问题。
1.2 TensorFlow的应用领域TensorFlow在各个领域都有广泛的应用。
以下是一些典型的应用场景:1. 图像和语音识别:TensorFlow可以用于图像和语音识别任务,例如人脸识别、语音指令识别等。
A Combined Model- and Learning-Based Framework 摘要

A Combined Model- and Learning-Based Framework for Interaction-Aware Maneuver Prediction动态环境下的运动预测需要一种在线算法来捕捉不同Agent之间的交互。
这项工作中拟议的框架符合这一要求。
首先,估计每个驾驶员在交通场景中与周围道路使用者的交互行为的运动意图。
将该初始估计与基于监督学习的分类器相结合,确定了每个交通参与者的不同未来策略及其概率。
由于提出了基于模型和基于学习的方法相结合的方法,给出了两个方面的最佳结果:第一,将驾驶行为和交通规则的专家知识集成到该框架中,简化了交互建模。
其次,减少了所需的标记训练数据的数量,因为不再需要识别分类器中道路使用者之间不同的交互模式。
因此,可以减少与获取、标记和存储培训数据相关的成本。
在此基础上,对相关文献进行了综述,定义了交互感知预测问题,并提出了满足上述要求的解决方案。
开发的方法将在高速公路上的实际交通场景中进行评估,展示其优点。
此外,根据实际交通流量的几个小时,给出了基于测试集的定量分析方法。
相关工作文献[4]的综述将现有的运动预测方法分为三种不同的方法:基于物理的、基于机动的和基于交互感知的模型。
简单地说,基于物理的模型抽象程度最低,仅限于不可靠的短期预测,而交互感知模型则在象征性的层面上工作(即不同的模型假设),提供更可靠的长期预测。
基于机动的方法是介于两者之间的。
基于物理的方法只考虑当前的观测,而不考虑任何情况的解释。
在这里,机动是通过简单的运动学模型,如等速,等加速度或恒定的转弯率[5],[6]来预测的。
另一个例子是蒙特卡罗模拟[7],[8]的使用。
因此,根据某些动态约束(近似可达状态集)随机采样输入向量。
随后,根据它们的风险、驾驶舒适性和其他预定义的准则来评估不同的未来轨迹,允许进行准随机预测。
基于物理的方法仅限于短期运动预测.此外,无法观察到的驾驶员意图完全被忽视,限制了他们的可靠性基于机动的运动模型消除了这个缺点。
机器学习算法在自动驾驶系统中的应用
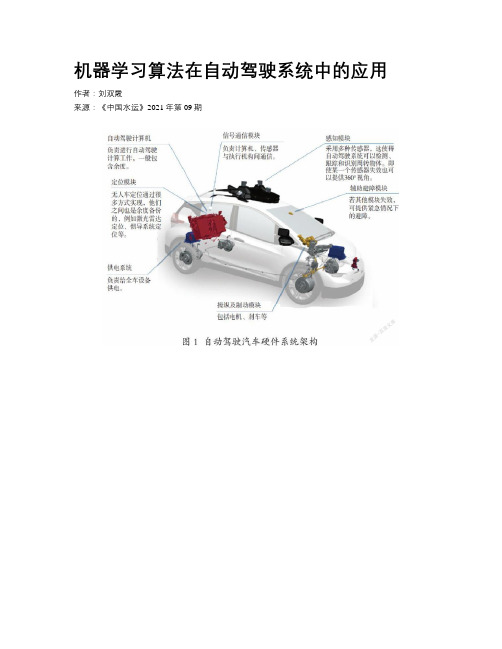
机器学习算法在自动驾驶系统中的应用作者:***来源:《中国水运》2021年第09期摘要:自20世纪初,随着人工智能的迅速发展,“自动驾驶”汽车也被雄心勃勃的工业巨头提出,作为新世纪科技时代的一大重要工业改革。
从2005年DARPA挑战赛以来,基于车辆智能化的自动驾驶,进入快速发展期。
从互联网巨头到传统汽车企业纷纷投入巨资,试图引领这场出行技术的革命。
本论文将概述自动驾驶这一方兴未艾的应用领域,并介绍机器学习算法在自动驾驶汽车领域发挥的作用及其实现原理。
关键词:自动驾驶;机器学习;算法中图分类号:U471.1 文献标识码:A 文章编号:1006—7973(2021)09-0148-041自动驾驶汽车研究现状1.1 研究背景及其国内外研究现状21世纪已经到了一个科技迅速爆发的时代,无人驾驶新能源汽车[1]更是如火如荼地发展,2016年7月,宝马、英特尔、mobileye正式宣布将与宝马共同合作开发一款无人驾驶新能源汽车,优势相得而补,各有所需,也大大减少了政府筹措用于发展自动驾驶技术[2]的资本、人才对自己主营业务的冲击。
2016年福特作为目前中国所有传统的智能车企中唯一的最后一家从迭加替代式自动安全驾驶智能汽车硬件扩充至第二代智能汽车硬件生产商,然而它的自动安全驾驶智能汽车硬件产品能力相比特斯拉而言却确实要微弱得多。
从现阶段国内的汽车智能无人驾驶产业市场总体分析情况来看,现代中国的智能无人驾驶这一技术发展起步较晚,它的L2和以及L3阶段均落后于欧美,但在L3和L4阶段却明显地呈现有所加速赶超之势,随着国内国外诸如百度等众多科技公司及其龙头企业在现代中国汽车智能无人驾驶这一关键技术发展方向上的深入研究和产业布局,智能无人驾驶这一技术已经逐渐获得更多国家政策上的支持。
1.2自动驾驶汽车的发展历程自动驾驶的级别划分主要包括两套标准:一套由美国高速公路安全管理局制定的,一套由SAE International制定的。
autoformer算法的概念
autoformer算法的概念AutoFormer算法的概念AutoFormer算法是一种新兴的自动特征选择算法,它在特征选择和机器学习领域中拥有广泛的应用。
AutoFormer算法通过自动选择关键特征,从原始数据中提取出最有用的信息,以便进行后续的机器学习模型训练和预测。
本文将从算法的背景和意义开始,逐步介绍AutoFormer 算法的原理、方法和应用。
一、背景和意义随着数据规模的迅速增长和机器学习应用的广泛应用,特征选择作为机器学习模型建立的重要预处理步骤变得尤为重要。
特征选择的目标是从原始数据中选择出对任务有重要贡献的特征,以减少数据处理的复杂性和提高模型的预测性能。
传统的特征选择方法往往需要借助领域知识或经验来手动筛选特征,这种方法在面对大规模数据集时效率低下且易出现特征选择的偏差。
因此,自动特征选择算法的研究和发展势在必行。
AutoFormer算法的提出正是为了解决传统特征选择方法的局限性。
它将特征选择过程纳入到一个自动化的框架中,利用机器学习和优化算法来实现特征的智能选择,从而提高模型的预测性能和泛化能力。
AutoFormer算法不仅可以提高特征选择的效果,还可以减少人工干预,提高模型开发的效率。
二、AutoFormer算法的原理和方法AutoFormer算法的核心思想是通过特征选择模型和优化算法相结合,自动选择对任务具有最大贡献的特征。
它提供了一个自动化的流程,从中对原始数据进行特征提取和重要性排序,进而选择出最佳的特征子集。
1. 特征提取AutoFormer算法首先通过一系列的特征提取方法,将原始数据中的特征转换为表示性更强的中间特征。
这些特征提取方法可以包括主成分分析(PCA)、独立成分分析(ICA)和多维尺度变换(MDS)等。
通过这些方法,可以将原始数据中的高维特征映射到低维空间中,减少特征的冗余性,并且保留最有用的信息。
2. 特征重要性排序在特征提取之后,AutoFormer算法利用一个特征选择模型来评估每个特征的重要性。
工业机器人的路径规划算法考核试卷

A. A*算法
B. D*算法
C. Floyd算法
D. Bresenham算法
16.在路径规划中,以下哪种数据结构用于存储已访问的节点?()
A.开放列表
B.关闭列表
C.路径列表
D.邻接矩阵
17.关于工业机器人的路径规划,以下哪个描述是错误的?()
B. Dijkstra算法
C. D*算法
D. RRT算法
13.关于路径规划中的碰撞检测,以下哪种方法计算量相对较小?()
A.精确碰撞检测
B.粗略碰撞检测
C.迭代最近点法(ICP)
D.点到线段距离计算
14.以下哪项不是路径平滑处理的目的?()
A.降低路径长度
B.减少运动时间
C.减少能量消耗
D.增加路径上的拐点
3.用于评估路径规划算法性能的指标通常包括路径长度、规划时间和______。
4.在路径规划中,为了减少计算量,常用的空间划分技术有四叉树和______。
5.机器人路径规划中的碰撞检测可以通过______和基于几何的碰撞检测两种方法实现。
6.路径平滑处理的目的是为了减少路径的拐点,提高路径的______和可执行性。
A. A*算法
B. Dijkstra算法
C. Floyd算法
D. Bresenham算法
2.下列哪种算法不属于路径规划中的启发式搜索算法?()
A. A*算法
B. D*算法
C. IDA*算法
D. Breadth First Search算法
3.在A*算法中,H(n)代表什么?()
A.从起始点到当前点的代价
4.在工业机器人路径规划中,如何处理动态障碍物?请提出一种算法或策略,并解释其工作原理和有效性。
自动机器学习(AutoML)自动化特征工程和模型选择
自动机器学习(AutoML)自动化特征工程和模型选择自动机器学习(AutoML)是人工智能领域中的一项重要技术,它能够有效地提升机器学习算法的效率和准确性。
其中,自动化特征工程和模型选择是AutoML的两个关键环节。
本文将就这两个方面进行探讨,并介绍当前研究的最新进展。
一、自动化特征工程特征工程是机器学习中至关重要的一环,它涉及到对原始数据进行预处理和特征提取的过程。
传统的特征工程需要依靠人工经验和领域知识进行特征选择和构造,耗时且容易出错。
而AutoML的自动化特征工程则摆脱了这些困扰,能够自动地选择和构建适合的特征。
在AutoML中,自动特征选择算法能够根据数据的特点和预测目标,自动选择最相关的特征。
一种常用的方法是采用基于统计检验或信息增益的特征选择算法,通过计算每个特征与目标之间的相关性,排除无关的特征。
此外,还有一些基于机器学习模型的特征选择方法,如L1正则化和随机森林等算法,它们通过构建机器学习模型,学习特征的权重并筛选特征。
自动特征构造是AutoML中的另一个重要环节。
传统的特征构造需要依赖人工的特征提取方法和特征变换技术,而AutoML通过自动地生成和组合特征,能够更好地表达数据的特征信息。
例如,AutoML可以通过多项式扩展、基于图像的特征提取和文本处理等方法,生成更丰富、更具代表性的特征。
二、自动化模型选择模型选择是机器学习中的另一个重要任务,其目标是选择适合数据集的最佳模型。
传统的模型选择方法需要手动尝试多个模型并进行比较,而AutoML则通过自动化的方式,能够更快地找到最佳模型。
在AutoML中,有两种常见的自动化模型选择方法:基于搜索和基于学习的方法。
基于搜索的方法通过穷举搜索或启发式搜索的方式,搜索最佳的模型及其超参数组合。
基于学习的方法则通过构建元模型,学习模型的性能和超参数之间的关系,从而预测最佳模型。
这两种方法都能够自动地对各种模型进行评估和比较,选择最合适的模型。
AutoGPT是什么
AutoGPT是什么近日,美国麻省理工学院(MIT)人工智能实验室发布了一款名为AutoGPT的聊天机器人系统,可完成各种任务。
目前,AutoGPT在美国和加拿大已被用于商业应用,例如电子邮件、语音识别、问答等。
与目前最先进的聊天机器人系统相比,AutoGPT的训练速度和准确度都更高。
AutoGPT系统的开发利用了神经网络、强化学习和语言建模等多个人工智能领域的最新成果,有望带来人机交互新体验。
一、简介AutoGPT是由MIT的人工智能实验室(AIL)开发的聊天机器人系统,旨在提供一种新颖、交互式、自然的人机交互方式,帮助人们在现实生活中更好地使用智能设备。
AutoGPT是基于 Transformer架构的预训练语言模型,可在多种任务上与人类进行自然交互。
AutoGPT能够根据给定的文本,通过推理、学习和训练,自主生成类似人类的回答。
与人类不同,AutoGPT能够执行多种任务,例如回答问题、提供建议、完成任务、生成文本或回答问题。
此外,AutoGPT还能够使用各种数据集进行训练和验证。
目前,AutoGPT已在多个领域应用,包括电子邮件、语音识别、问答等。
二、算法AutoGPT的开发基于以下两个原则:1.使用预训练的模型来学习语言建模。
与传统的机器学习模型不同,AutoGPT的预训练过程是基于知识图谱进行的,其使用了大量的实体和关系来表征文本,这些实体和关系也可以用于其他任务。
在这一过程中,AutoGPT能够学会用实体来表示文本,也能通过关系来表示文本。
2.将模型与强化学习相结合。
强化学习是一种机器学习模型,可以模拟真实世界中人们做决策的过程。
因此,AutoGPT使用强化学习来学习模型的决策和策略。
与传统的机器学习模型不同,AutoGPT使用强化学习来学习如何做出最佳决策,例如在与用户进行交互时采取合适的行动。
三、模型架构AutoGPT基于Transformer架构,采用多层堆叠的Transformer架构,以进行序列到序列的建模,可完成句子生成、问答、对话生成等多种任务。
《深度学习在自动驾驶中的应用》的文献综述
《深度学习在自动驾驶中的应用》的文献综述摘要:随着人工智能技术的飞速发展,深度学习已成为推动自动驾驶技术革新的关键力量,在未来自动驾驶依托深度学习会有更快的发展。
本文综述了深度学习在自动驾驶领域中的最新应用,并探讨了其未来的发展趋势。
本文展望了深度学习在自动驾驶领域中的未来发展趋势。
随着计算能力的提升和算法的优化,深度学习将在自动驾驶系统中发挥更加重要的作用。
同时,随着5G、物联网等技术的普及与应用,自动驾驶系统将实现更加高效的信息共享与协同工作,从而推动智能交通系统的全面发展。
关键词:深度学习;自动驾驶;感知;决策;控制;智能交通系统一、引言随着科技的飞速发展,自动驾驶技术是当今科技领域一个备受瞩目的研究和发展方向,它代表了现代交通系统未来的发展潜力。
深度学习作为人工智能领域的一个重要分支,在自动驾驶中扮演着关键角色。
近年来,深度学习技术的崛起为自动驾驶领域带来了革命性的变革。
深度学习以其强大的特征提取能力和模型泛化能力,为自动驾驶系统的感知、决策与控制等核心模块提供了全新的解决方案。
在自动驾驶的感知模块中,深度学习技术通过构建深度神经网络模型,能够实现对车辆周围环境的高精度感知与理解。
无论是复杂的道路场景、多样的交通参与者,还是多变的天气条件,深度学习都能以出色的性能完成识别与分类任务,为自动驾驶系统提供准确的环境信息。
在决策模块中,深度学习通过强化学习等方法,使自动驾驶系统能够自主规划行驶路径并做出合理决策。
这些决策不仅基于当前的环境信息,还考虑了未来的路况变化、交通流量等多种因素,从而确保车辆行驶的安全与高效。
此外,深度学习在自动驾驶的控制模块中也发挥着重要作用。
通过优化控制算法,深度学习能够实现对车辆行为的精准控制,包括车速、转向、制动等。
这种精准控制不仅提高了行车稳定性,还降低了事故发生的概率。
尽管深度学习在自动驾驶领域展现出了巨大的潜力,但也面临着诸多挑战。
数据标注成本高、计算资源消耗大、安全性保障难等问题都亟待解决。
基于深度强化学习的人工智能自动驾驶算法研究

基于深度强化学习的人工智能自动驾驶算法研究第一章介绍人工智能自动驾驶技术的迅猛发展,已经成为当代科学技术领域的一个热点。
与传统的自动驾驶技术不同,基于深度强化学习的人工智能自动驾驶算法能够通过学习和训练来实现自主决策和行为,大大提高了驾驶的安全性和效率。
本章将对基于深度强化学习的人工智能自动驾驶算法进行综述和介绍。
第二章深度强化学习的基本原理深度强化学习是指以深度学习为基础的强化学习算法。
深度学习是一种模拟人脑神经网络的学习方式,通过多层次的神经网络结构,实现对大量数据的表征和学习。
而强化学习是一种通过与环境的交互来学习最优决策策略的学习方式。
深度强化学习将这两种学习方式结合起来,通过神经网络对环境的模拟和学习,实现自主决策和行为。
第三章人工智能自动驾驶算法的研究现状当前,基于深度强化学习的人工智能自动驾驶算法研究正处于蓬勃发展的阶段。
研究者们通过搭建模拟环境和真实道路测试场景,采集大量驾驶数据,并结合深度学习算法对数据进行训练和学习,分析驾驶策略和决策过程。
研究表明,基于深度强化学习的人工智能自动驾驶算法能够在各种复杂环境中实现高效准确的自主驾驶。
第四章基于深度强化学习的人工智能自动驾驶算法的关键技术基于深度强化学习的人工智能自动驾驶算法的关键技术主要包括数据采集与预处理、神经网络设计与训练、状态空间建模与维护、动作选择与优化等方面。
其中,数据采集与预处理是为了获取与驾驶相关的大量数据,并对数据进行预处理以提高训练效果;神经网络设计与训练是为了构建深度强化学习模型,并通过训练来优化模型参数;状态空间建模与维护是为了对驾驶环境进行建模和状态更新;动作选择与优化是为了根据当前状态选择最优的驾驶动作。
第五章基于深度强化学习的人工智能自动驾驶算法的应用基于深度强化学习的人工智能自动驾驶算法在现实应用中具有广阔的前景。
通过对驾驶数据的学习,算法可以根据不同的驾驶环境和路况,实现智能驾驶决策和控制,提高驾驶的安全性和效率。
强化学习AI的自我学习之路
强化学习AI的自我学习之路自从强化学习(Reinforcement Learning)被引入人工智能领域以来,它的自我学习能力一直备受关注。
强化学习AI通过与环境的交互,通过试错的方式不断调整策略,以最大化预期奖励,从而实现能够独立学习和适应新环境的能力。
下面将深入探讨强化学习AI的自我学习之路。
强化学习AI最重要的组成部分是智能体(Agent)和环境(Environment)。
智能体与环境进行交互,通过观测环境状态和奖励信号,选择行动,并在环境中获得反馈。
该过程可以用马尔可夫决策过程(Markov Decision Process)进行建模,以便智能体能够学习合理的决策策略。
第一阶段:探索与利用在强化学习AI的自我学习之路中,最初的阶段是探索与利用的平衡。
智能体需要在未知环境中探索,并尝试不同的行动来了解环境的反应和奖励。
这个阶段的目标是积累经验,建立起环境和行动之间的映射关系。
然而,随着时间的推移,智能体需要开始利用先前的经验来制定更好的策略。
在这个阶段,智能体将会陷入探索与利用之间的权衡。
如果它只专注于利用已知的最优行动策略,则可能会错失探索新策略的机会。
因此,平衡探索与利用是强化学习中非常重要的问题。
第二阶段:策略改进在探索与利用阶段之后,强化学习AI将开始着重于策略改进。
通过选择最优的行动策略,智能体能够最大化预期奖励。
常见的策略改进算法包括值迭代(Value Iteration)和策略梯度(Policy Gradient)等。
值迭代是一种基于价值函数的算法,它通过迭代更新状态值函数,从而找到最优的策略。
策略梯度算法则是基于策略函数的优化方法,通过计算策略函数的梯度来改进智能体的决策策略。
第三阶段:深度强化学习随着深度学习技术的兴起,深度强化学习(Deep Reinforcement Learning)成为强化学习AI的新趋势。
它结合了深度神经网络和强化学习算法,使得智能体能够处理高维状态和动作空间,进一步提升学习能力。
用AI构建AI-AutoML综述

⽤AI构建AI-AutoML综述1 前⾔这篇⽂章会主要以《Automated Machine Learning: Methods, Systems, Challenges》这本书为主要参考,结合⼀些其它论⽂,⼯具框架对这个领域进⾏介绍。
2 背景我们先来看什么是AutoML。
顾名思义,AutoML就是⾃动化的机器学习,我们先从机器学习中最常被⾃动化的⼀个任务,超参数优化来举例。
⽐如我们在做⼈⼯调整超参数时,经常会采⽤以下的⽅法:1. 把模型的学习率参数设为0.01,训练模型,获取评估指标的得分,⽐如准确率为0.7。
2. 把模型学习率设为0.1,训练模型,再次获取评估指标,⽐如下降到了0.65。
3. 根据上述的观察结果,接下来我们可能尝试⼀个⽐0.01更⼩的值,以此类推。
从上⾯这⼏个步骤,我们不难看出我们在⼈⼯解决这个参数优化问题时,其实在不⾃觉中已经引⼊了⼀些优化⽅法。
我们扩⼤了学习率参数,但发现准确率降低了,所以接下来我们会往相反的⽅向调整学习率来继续尝试,这是建⽴在准确率 = f(超参)是⼀个平滑的凸函数的基础上,模拟梯度下降的做法来进⾏尝试。
所以如果只有这⼀个参数,这个⾃动化的过程还是挺容易建⽴的,⽐如应⽤经典的⼆分法。
在这个想法的基础上,我们可以把这个想法在各个维度上进⾏扩展:实际的任务的超参个数⽐较多,⽽且往往会有相互影响,导致搜索空间很复杂。
⽽且超参跟预测指标之间的关系,往往也不是理想的平滑凸函数。
所以我们如何通过已有尝试,去选择下⼀个探索点,需要引⼊更复杂的⽅法。
除了预测指标外,我们往往还会有其它连带需要优化的⽬标,⽐如希望训练/预测的时间尽可能短,消耗的计算资源尽可能少,这就会变成⼀个多⽬标的优化问题。
⼈类专家在做算法调优时,不会每次都从头开始,⽽往往会考虑历史上碰到过的类似问题,把过去的经验带⼊到新问题中,最典型的⽐如选取之前有效的参数作为初始尝试点,使⽤之前表现好的模型来做fine-tune等。
人工智能专业优秀毕业论文范本基于深度强化学习的自动驾驶算法研究
人工智能专业优秀毕业论文范本基于深度强化学习的自动驾驶算法研究在现代社会,随着科技的不断进步和人工智能的迅猛发展,自动驾驶技术成为了备受关注的热门话题。
作为人工智能领域的重要应用之一,自动驾驶技术的发展对交通行业具有重要的意义。
本论文以人工智能专业的毕业论文为例,结合深度强化学习的方法,对自动驾驶算法进行了研究。
首先,论文讨论了人工智能和自动驾驶技术的背景和意义。
随着人工智能技术的快速发展,自动驾驶技术逐渐成为了未来交通行业的重要发展方向。
通过引用相关数据和统计,论文指出了自动驾驶技术对提高交通效率、降低交通事故率和解决交通拥堵等问题的重要作用。
接着,论文介绍了深度强化学习在自动驾驶领域的应用。
深度强化学习是一种基于深度神经网络的学习方法,通过强化学习算法和深度学习技术的结合,使得自动驾驶系统能够在自主决策和行为控制方面取得更好的效果。
通过详细的理论分析和实验验证,论文展示了深度强化学习在自动驾驶技术中的潜力和优势。
在研究方法方面,论文采用了深度强化学习算法中的主要组成部分。
首先,通过构建适合自动驾驶的环境模型,论文设计了合适的状态特征表示方法。
然后,通过基于深度神经网络的价值函数逼近方法,论文构建了自动驾驶算法的学习模型。
最后,论文利用强化学习算法对自动驾驶系统进行了训练,并进行了实际道路测试和仿真实验。
在实验结果分析方面,论文对自动驾驶算法进行了性能评估和对比分析。
通过与传统的自动驾驶算法进行对比,论文表明了基于深度强化学习的自动驾驶算法在行驶效果、安全性和稳定性等方面的优势。
通过引用实验数据和统计结果,论文展示了深度强化学习在自动驾驶技术中的实际应用效果。
最后,论文总结了研究的主要成果和创新点,并提出了进一步的研究方向和发展建议。
通过对自动驾驶算法的研究和优化,论文为自动驾驶技术的发展做出了一定的贡献,并对未来的研究方向和发展趋势进行了展望。
综上所述,本论文以人工智能专业的毕业论文为例,基于深度强化学习的方法,对自动驾驶算法进行了研究。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A Machine Learning Framework for Automatically Annotating Web Pageswith Simple HTML Ontology Extension (SHOE)QingFeng Lin1, Stephen D. Scott2, and Sharad C. Seth21J.D. Edwards & Company, One Technology Way, Denver, CO 80237, USAE-mail: qingfeng_lin@2Dept. of Computer Science, Ferguson 115, University of Nebraska, Lincoln, NE 68588-0115, USAE-mail: {sscott, seth}@AbstractWith enormous amounts of information injected into the Internet every second, manual maintenance of the knowledge base on the Internet is a hopeless task. A reasonable remedy for this problem is to create a “machine understandable” Internet. To achieve this, Heflin et al. proposed an HTML-based knowledge representation language called S imple H TML O ntology E xtension (SHOE). SHOE can be used in many application domains, but it requires users to manually annotate the web pages. To overcome the shortages of SHOE, we created a machine learning framework called AutoSHOE for automatically annotating web pages with SHOE annotations. With this framework, users can easily collect SHOE-annotated pages as training data, experiment with different feature selection methods and learning algorithms to find the best approach for learning a particular ontology, and automatically annotate new web pages with trained classifiers and rule sets. In addition, AutoSHOE allows new feature selectors and learners to be easily plugged into the system and run anywhere through the web. We present the AutoSHOE architecture and then discuss experimental results of our proof-of-concept design.1 Introduction and MotivationIt is well known that getting a computer to understand an HTML document is very difficult, if not impossible. This is because HTML is primarily a formatting tool for graphical displays intended to be read by humans. HTML does not allow other processing capabilities. In order to help an intelligent agent to “understand” the knowledge on web pages, Heflin et al. [1] proposed an HTML-based knowledge representation language called S imple H TML O ntology E xtension (SHOE). SHOE is a small extension of HTML. It allows web page authors to annotate their web documents with respect to one or more predefined ontologies. An ontology defines the categories (or classes) and the relations between the categories. A web page can subscribe to one or more ontologies, declare data categories, and make assertions about those categories under the relations defined in the ontologies. SHOE makes intelligent agent software on the web possible by annotating HTML using XML-style notation. As a first step toward creating a machine-understandable Internet, SHOE is useful in many ways [2]. However, using SHOE requires humans to manually annotate the web pages. This approach is tedious and labor-intensive. Moreover, SHOE is of no use without such annotations and the SHOE annotations depend entirely on the ontology that the web page author used.To overcome these shortages, we propose automatic annotation of web pages with machine learning techniques. Machine learning techniques have been successfully applied to information extraction, text document classification, relation rule learning and many other information processing areas [3]. However, machine-learning systems for ontologies are difficult to build for several reasons: (a) They require the designer to have background knowledge in machine learning; (b) training a learner on an ontology requires time consuming steps of gathering large amounts of labeled training data, selecting features, translating featuresinto the learner's file format, and training the learners; and (c) many different feature selection methods must be tried in order to find one that works best for a specific ontology. On the other hand, once training is done, annotating new pages is relatively easy and cheap. AutoSHOE bypasses the above difficulties by obtaining trained learners through the Internet to annotate unlabeled web pages.AutoSHOE is a machine learning framework that simplifies the training process and the sharing of training data and trained learners. It integrates machine learning systems to learn SHOE ontologies in a seamless way. With this framework, the users can collect online SHOE-annotated pages as training data, experiment with different feature selection methods and learning algorithms to find the best approach for learning a particular ontology, and automatically annotate new web pages with SHOE's annotations. As a framework, AutoSHOE is highly extensible, sharable and customizable. AutoSHOE can be accessed at and a more detailed description is available from Lin [4].2 Machine Learning Approach for SHOEA well-defined learning system includes a task, training data and a performance measure. In AutoSHOE, our training data will be SHOE-annotated web pages and our task will be to automatically label a new web page with SHOE's annotation tags. In other words, AutoSHOE takes two inputs as training data: an ontology that specifies the classes and relations of interest and the web pages that are the instances of the ontology. AutoSHOE will output a classifier that can classify new web pages and rule sets that can deduce the relations among the new pages.2.1 Learning Classification Rules for SHOE OntologiesLearning SHOE's classification rules in our system is equivalent to looking for a classifier that can label new web pages with predefined ontology categories. In order to find such a classifier, we need a set of labeled instances and induction algorithms. In Figure 1, we see that AutoSHOE collects the labeled instances by first parsing the category tags in SHOE-annotated documents. The attribute name in the category tag provides the label for an instance. The attribute for in the category tag gives the URL of the HTML document. This HTML document will be transformed into attribute-value pairs by three steps: first the feature text (the piece of text that reflects the contents of the page, such as body text, title/header text etc)will be extracted from an HTML document, then feature keywords will be extracted from text, finally the text will be represented as a feature vector consisting of keywords.This feature vector along with the label will be combined together as an instance and inserted into the database. Later, the labeled instances will be extracted from the database as training data for an induction algorithm. This induction algorithm will produce a classifier as well as the performance measure of this classifier. These outputs will be inserted back to the database for further use.Figure 1: Process of Learning SHOE's Categorization Rules2.2 Learning SHOE's Relation RulesThe problem of Learning SHOE's relation rules can be divided into two sub-problems. When the relation rules describe the relationship between categories, it can be viewed as a binary relation learning problem. When the relation rules describe a relationship between a category and other data, such as a number, date, or string (e.g. a string representing an address), it can be viewed as a text field extraction problem. In this section, we will focus on how to learn the binary relations that describe relationship between pairs of web pages.SHOE's binary relation can be learned by a first-order logic learner such as FOIL [5]. In order to let the first-order rule learner produce a definition of the target relation, we need positive tuples and negative tuples of the target relation and background knowledge. In Figure 2, AutoSHOE gets the positive tuples and background knowledge by parsing SHOE's relation tags and gets the negative tuples by randomly enumerating two pages that do not belong to the positive tuples.Figure 2: Process of Learning SHOE's Relation Rules2.3 Annotating New Web PagesAfter the training is done, we can use the learned classifiers and rule sets to annotate new web pages (Figure 3). The annotation process is similar to training. First we collect a set of new HTML documents that we wish to label with respect to the ontology that we trained our classifier for. Then we follow the same feature selection procedure to represent the HTML document as a feature vector. This feature vector will be used as an unlabeled instance. We can also parse the hyperlinks in the web pages, which will be used as the background relations to deduce the target relation. The unlabeled instances and the hyperlinks will be inserted into the database. In order to annotate the web pages with SHOE's classification rules, we send the unlabeled instances from the database to the classifier. The classifier then labels these instances. In order to annotate the web pages with SHOE's relation rules, we extract the rule sets and the background relations from the database and send them to a deduction program such as Prolog. The deduction program will discover the target relation according to the rule sets and the background relations.Figure 3: Web Page Annotation2.4 AutoSHOE ArchitectureAutoSHOE is a three-tiered architecture (Figure 4). The first layer is the presentation layer, which is a set of HTML and Java Server Pages. The end users use the presentation layer to collect data, train classifiers, and annotate new web pages. The middle layer is the tools layer, which is a set of Java Objects. These tools are responsible for searching, collecting, filtering, storing and maintaining data. On the back end are the third party machine learning algorithms, which are used for feature selection and learning SHOE's classification and relation rules. These systems can be written in any language and can run on any server. They plug into the AutoSHOE framework by using system adapters. These adapters talk to the broker in AutoSHOE and map the training data to its format.Figure 4: System Architecture of AutoSHOE3 A Case Study: Learning cs-depart-ontologyAs a proof of concept, we used this framework to set up an experiment to learn the computer science department ontology (cs-depart-ontology), as defined by Heflin et al. We first used our framework to collect the SHOE-annotated web pages from four universities (University of Maryland at College Park, University of Washington, University of Texas at Austin, and University of Wisconsin-Madison) as training data. Then we plugged in three different learning systems: Rainbow [6], MLC++ [7] and FOIL6 [8]. Rainbow is a software package that performs statistical text classification. It classifies the text using learning algorithms such as naïve Bayes and expectation maximization (EM). MLC++ is a machine learning C++ library that provides many commonly used machine-learning algorithms, such as C4.5, ID3, instance-based learning, and naïve-Bayes. FOIL6 is a rule learning system that produces Horn clausesfrom relational data.In order to learn the classification rules of the cs-depart-ontology, we first applied several HTML and text feature selection methods to preprocess the raw data. Then we used Rainbow's naïve Bayes algorithm and MLC++'s implementations of ID3 and k-nearest-neighbor to find a classifier for the web pages according to the categories defined by cs-depart-ontology. Our experiments show that a very accurate classifier can be produced by extractingthe body text from the HTML, then using the text feature selector to prune out the terms that occur in fewer than six documents, then using the rest of text to train the naive-Bayes algorithm.In order to learn the relation rules of the cs-depart-ontology, we first parsed the hyperlinks among the web pages, then used FOIL to learn the relation rule teacherOf(Page,Page) and subOrganziation(Page,Page). The learned rule set is as follows.cs.teacherOf(A,B) :- cs.course(B), cs.faculty(A), linkTo(C,A,B).cs_subOrganization(A,B) :- cs_ResearchGroup(A), cs_Department(B), linkTo(C,A,B).cs_subOrganization(A,B) :- cs_ResearchGroup(A), cs_University(B), linkTo(C,A,B).At the end of the experiment, we used the trained classifier and learned rules set to automatically annotate the web pages of the Computer Science Department of the University of Nebraska-Lincoln. The results are in Table 1.Table 1: Confusion Matrix for Automatic Annotation of CS-UNL Web PagesCourseTotalResearchGroupStudentFacultyFaculty 10 6 0 0 62.5% Student 2 66 2 0 94.28%0 92.85% Course 0 2 260 1 0 0 0% ReseachGroupAs we can see, the results are good in that we attain over 90% accuracy for the classes Student and Course. The class Faculty has a low accuracy rate due to a small data set availablefor training. Also, for some faculty web pages the context is too simple: for example, some pages only contain a resume, which confuses the classifier. Finally, since the class ResearchGroup has only one test page, evaluation of the classification accuracy for this class is meaningless.4 ConclusionWe presented an online machine learning center that can automatically grab SHOE-annotated pages as training data and use machine learning techniques to learn classifiers and rule sets fora SHOE-defined ontology. As the middleware between the complex machine learning systemsand the end users, AutoSHOE provides a uniform and easy to use environment so that even inexperienced users can use this framework to learn an ontology and annotate new pages. These labeled pages can then be manually verified and used to train new classifiers. As a framework, AutoSHOE is highly extensible: it allows new learning algorithms and feature selection algorithms to be dynamically added into the system. AutoSHOE is highly sharable: it allows the training data, feature selectors, learners to be allocated anywhere on the web, and thetraining results can be accessed from anywhere through web. AutoSHOE is also highly customizable: it allows users to tailor the interface. Finally, our AutoSHOE prototype successfully proved the concept of an online machine learning center.AcknowledgmentsThe authors thank the reviewers for their helpful comments. This work was supported in part by NSF grant CCR-9877080 with matching funds from CCIS and a Layman Foundation grant. QingFeng Lin performed this work at the University of Nebraska.References[1] Jeff Heflin, James Hendler, and Sean Luke, SHOE: A knowledge representation language for Internet applications. Technical Report CS-TR-4078, University of Maryland, 1999.[2] Jeff Heflin, James Hendler, and Sean Luke, Applying Ontology to the Web: A Case Study. In Proceedings of the International Work-Conference on Artificial and Natural Neural Networks, IWANN'99, 1999.[3] Tom Mitchell, Machine Learning, McGraw-Hill Publishing Company, 1997.[4] QingFeng Lin, A Machine Learning Framework for Automatically Annotating Web Pages with Simple HTML Ontology Extension (SHOE). Master’s thesis, University of Nebraska- Lincoln, 2000.[5] J. Ross Quinlan and R. M. Cameron-Jones, FOIL: A midterm report, 3-20. In Proceedings of the European Conference on Machine Learning, Springer-Verlag, 1993.[6] Andrew K. McCallum. Bow: A toolkit for statistical language modeling, text retrieval, classification and clustering. /~mccallum/bow, 1996.[7] MLC++ home page: /tech/mlc/. Last reviewed March 13, 2001.[8] FOIL6: Produces Horn clauses from data expressed as relations. ftp.cs.su.oz.au/pub/foil6.sh。