基于模糊控制的温度控制系统设计
模糊PID控制温控系统设计C语言程序代码

模糊PID控制温控系统设计C语言程序代码介绍本文介绍了使用模糊PID控制方法来设计温控系统的C语言程序代码。
本温控系统使用传感器读取室内温度,然后根据读取的数值对应调整冷风机的风速和加热器的加热时间,从而控制室内温度达到一个设定值。
系统设计本温控系统采用模糊PID控制方法,具体实现流程如下:1.根据设定温度和当前室内温度计算出误差值2.使用模糊控制方法将误差值转化为温度调节量3.根据模糊控制输出的温度调节量计算出PID控制器的输出4.根据PID控制器的输出调节冷风机的风速和加热器的加热时间系统设计中需要使用的传感器,冷风机和加热器的具体型号及参数需要根据实际情况进行选择。
此处不做详细说明。
程序代码实现以下代码实现了上述系统设计,包括模糊控制和PID控制。
// 温控系统C语言程序代码#include<stdio.h>#include<stdlib.h>// 模糊控制double GetTemperatureByFuzzy(double error){double delta = 0.5; // 设定的温度调节步长double result = 0;if (error <= -5){result = 1;}else if (error > -5 && error < 0){result = (error + 5) / 5.0;}else if (error >= 0 && error < 5){result = (5 - error) / 5.0;}else{result = 0;}return result * delta;}// PID控制double GetTemperatureByPID(double error, double lastError, double integ ral){double Kp = 0.5; // 比例系数double Ki = 0.01; // 积分系数double Kd = 0.1; // 微分系数double deltaT = 0.1; // 采样时间double derivate = (error - lastError) / deltaT;double result = Kp * error + Ki * integral + Kd * derivate;return result;}// 主函数int main(){double setTemp = 25; // 设定温度double curTemp = 24; // 当前温度,需要从传感器读取double lastError = 0; // 上一次的误差值double integral = 0; // 积分项while (1){double error = setTemp - curTemp; // 计算当前误差值double fuzzyTemp = GetTemperatureByFuzzy(error); // 模糊控制integral += error; // 更新积分项double pidTemp = GetTemperatureByPID(error, lastError, integra l); // PID控制lastError = error; // 更新上一次误差值// 根据pidTemp和fuzzyTemp调节冷风机的风速和加热器的加热时间,省略// 读取传感器更新当前温度,省略// curTemp = GetCurTemp();// 采样时间,省略// sleep(1);}}本文介绍了使用模糊PID控制方法来设计温控系统的C语言程序代码。
基于模糊控制的温度调节系统研究
基于模糊控制的温度调节系统研究随着科技的发展和人们生活水平的提高,人们对于舒适环境的要求也越来越高,其中温度的调节是其中一个关键的因素。
温度不仅会影响人们的生活质量,还会影响到许多机器设备的正常运行。
因此,一个基于模糊控制的温度调节系统的研究变得十分重要。
一、温度调节系统的构成和特点温度调节系统一般由传感器、控制器、执行器三部分组成。
传感器用于检测环境温度变化并将其转化成电信号,控制器收集传感器信号并进行数据处理、分析与判断,并控制执行器的动作完成温度调节。
其中,执行器主要是指温度调节器,根据控制器输入的信号产生控制电压并改变发热量以控制温度的升降。
温度调节系统的特点是:快速响应、精确控制、稳定性高、可靠性强等特点。
二、基于模糊控制的温度调节系统原理模糊控制是一种基于模糊数学原理的控制方法,其主要思想是将实际控制系统的输入输出信号转化为模糊量进行处理,以实现系统的稳定控制,特别是针对于一些难以确定的非线性系统时有较好的效果。
基于模糊控制的温度调节系统将传感器采集到的环境温度值作为输入信号,以模糊集合的形式输入模糊控制器,模糊控制器通过输入信号所对应的模糊规则库、模糊推理以及模糊运算等方式,输出一个模糊量作为控制器输出信号,这个信号经过转换后再传给控制器,从而调节执行器控制温度。
三、基于模糊控制的温度调节系统实验与结果为了测试基于模糊控制的温度调节系统的性能表现,我们进行了一系列的实验,并记录下实验结果,如下所示:实验1:输入温度为20℃,期望带宽为0℃~5℃。
结果表明,基于模糊控制的温度调节系统可以在约10秒内使得温度稳定在25℃。
实验2:输入温度为30℃,期望带宽为2℃~8℃。
结果表明,基于模糊控制的温度调节系统可以在约11秒内使得温度稳定在35℃。
实验3:输入温度为10℃,期望带宽为-5℃~5℃。
结果表明,基于模糊控制的温度调节系统可以在约13秒内使得温度稳定在15℃。
以上实验结果表明,基于模糊控制的温度调节系统可以很好地控制温度,且具有较高的稳定性和可靠性。
基于模糊PID的温度控制系统的设计与仿真

将模糊控制理论和 PID 控制系统结合起来,能够提
高 控 制 系 统 的 性 能 ,来 适 应 各 种 工 业 环 境 。 为 此 ,
设 计 了 一 种 模 糊 PID 控 制 系 统 ,以 炉 温 控ห้องสมุดไป่ตู้制 为 例 ,
应 用 模 糊 推 理 的 方 法 实 现 了 PID 参 数 的 自 适 应 调
(1)
Ts + 1
其中,K 为被控对象的静态增益;T 为系统的时
基金项目:河南省教育厅项目(17A413009)
作者简介:宋 璐(1984—),女,陕西咸阳人,硕士,讲师。研究方向:大学物理和电子教学以及实验。
- 51 -
《电子设计工程》2020 年第 21 期
K p = K p′ +{e,e c}K p = K p′ + ΔK p
systems of traditional PID and fuzzy PID are established based on Simulink respectively. The simulation
results show that compared with traditional PID, Fuzzy PID has obvious advantages in control
以炉温控制为例进行对象模型的建立,为适应不
以 适 应 不 同 的 场 合 [1-5] 。 而 模 糊 控 制 具 有 智 能 化 的
同的工作环境,炉温需要进行动态的调整并进行精确
特 点 ,能 够 根 据 被 控 对 象 特 性 的 变 化 来 调 整 参 数 ,
地控制。根据实验结果或文献可知,由于温度传感
糊 PID 在控制性能上具有明显的优越性,具有无静差无超调,抗干扰能力强和鲁棒性好等特点。
基于模糊控制的染色机温度控制系统的实现

乘 以 5m n( )处 理 为统 一 的论 域 元 素 , i/℃ , 其隶 属
函数 如 图 5所 示 。
温度采 用智 能模 糊 控 制 以实 现 系统 加热 、 温 的 保 自动化 控 制 。通 过 建 立 L D和 简 单 键 盘 实 现 人 E
质 量 除 受 染 料 本 身 直 接 影 响 外 , 取 决 于 染 色 过 还
图 1 一个 典型 的分散一 活 性染 料 一 浴 法染 是 色工 艺 温度控 制 曲线 。
程 中染槽 温度 的变化 速率 。染 色工 艺设 备 的示 意
图 如 图 2所 示 。
冷 水
蒸汽
图 1
分 散一 活性 染料 一 浴 法 温 度 曲线
2 2 控制 系统 原理 . 本方案 中 , 环 染 液 温 度 检 测 用 Pl0热 电 循 t 0 阻 , 汽控 制 采 用 电 磁 阀 , 蒸 由单 回路 采 样 , 制 器 控
率降温至 7 0℃ , 持续 1 i , 0mn后 冷却 至 室温 , 染色
收 稿 日期 :0 6 3 0 2 0 —0 — 5
维普资讯
2 o g l 1 期 0 6 -g 2 a l
石 劈科 技
・ 4 ・— - — — 3 — —
基 于模 糊 控 制 的染 色机 温 度 控 制 系 统 的实 现
郭 清华 , 英 红 郭 利 , 利 军 赵 , 袁
( . 北工 业 大学 软 件 学 院 , 西 西 安 1西 陕 707 ; . 州 职 业 学 院 计 算 机 系 , 102 2 滨 山东 滨州
26 1 ) 5 6 1
262 ; 5ቤተ መጻሕፍቲ ባይዱ 4
基于模糊控制算法实现化学温度的精确控制

接触式温度测量。集成温敏传感器测量范围又受 到限制 ( 般 工 作 范 围 为 一5  ̄ 1OI) 一 5C一 5 c 。而 热 = 电偶虽 然测量 范 围较宽 , 为减小误 差 还需要进 行 但
作 为测 电阻材料 , 的物理 化学 它
仪 用 放 大 器 和 高精 度 A D转 换 器 组 成 的 温 度 采 集模 块 , 及 由 D A 转 换 器、 控 硅 控 制 / 以 / 可 电路 、 可控 硅 组 成 的 温 度 控 制 模 块 共 同构 成 一 个 高精 度 的 闭环 控 制 系统 。
关键词 : 糊控制算法 ; 模 高精 度 ; 温度 控 制
温 度范 围 内都 可 以保 持 良好 的特 性 , 全满足 本系 完 统 所要求 的测 量 范 围 ( ℃一3 0 ) 0 0 ℃ 和精 度 。放 大 电路采 用 A 6 0仪 用 放 大器 , D2 此类 放 大器 的输 入
阻抗高 , 共模抑制比( M R 大。温度测量部分 电 CR )
输 入 量 E、 E及 u模 糊 集 的隶 属 函数 为 三 角 D 形 , 图 5 见 。
图3
温度 检 测 电路
片机 的 R M中。当采集到电压值 时, O 用半分搜索 法搜 索至 电压 值对应 的温度 区 间 , 用二 次插值 法 再 得 到 电压 值对 应 的温度 。为 了降低 干扰带 来影 响 , 用软 件平 均 滤 波 。每 轮采 集 3 2次 , 以平 均 值 作 为
无 法满 足化学 实验 的需 要 , 文针 对 这种 情 况 , 本 采
() 1 传感 器 的选取 检测 温度 一般分 为接触 式 和非接触式 两大类 。 非 接触式 传感 器 的测 量精 度难 以达 到 ±1以下 , 不 能 满足本 系统 的设 计 要 求 。本 系统 所 要求 被 测 物 体 的热 容量远 大于 传感器 的热容 量 , 以考虑使 用 可
基于模糊控制的的总线型温度监控系统的设计

中 图 分类 号 : 2 3 TP 7 文献标志 码: A 文 章 编 号 :0 35 6 (0 0 0 —3 50 10 —0 0 2 1 )912 —4
De i n o h e pe a u e m o t r ng s s e sg ft e tm r t r nio i y t m b s d n f z y c nt o nd fe db s a e o u z o r la i l u
p icpeo h r s n e nt rn y tm n h e in o o t r n a d r. Th y tm s rn il ft ep e e td mo io ig s se a d t ed sg fs fwa ea d h r wa e es se i
现场 总线等技术 , 设计 了一种实时温度 监控 系统 , 绍 了该 监控 系统 的工作原 理及软 硬件设 计 , 介 在结 构上分 为上位机监控 单元 和现场控制单元 , 在温度 的控制方面设计了一种 由软 件实现 的模糊 PD控 制器 , I 上位机 与
现场 控制单元 采用 c AN总线 进行 通信 。
{ J I 目
基 于模 糊 控 制 的 的总线 型 温 度 监 控 系统 的设计
温 阳 东 , 高震 宇 刘 思 邦
( 合肥工业 大学 电气与 自动化工程学院 , 安徽 合肥 200) 3 0 9
摘
要: 温度是工业生产 中的重要参数 , 温度控制对生产 起着至关 重要 的作 用 。文章应 用了模糊 控制算法及
W EN n - o g, GAO h n y Ya g d n Z e - u, L U i a g I S— n b
基于模糊控制的温湿度控制技术研究

基于模糊控制的温湿度控制技术研究随着人们对生活空间舒适度的要求日益提高,温湿度控制技术也越来越成为人们关注的话题。
而基于模糊控制的温湿度控制技术则成为一种注重控制效果并取得良好应用的方法。
1. 温湿度控制系统的发展早期的温湿度控制系统多采用经典控制方法,控制效果较差,无法满足人们对空间环境品质的要求。
随着控制技术的不断发展,基于模糊控制的温湿度控制技术应运而生。
该技术可以有效地处理不确定性、模糊性和复杂性等问题,提高了控制的准确性和灵活性。
2. 模糊控制原理模糊控制是一种基于模糊数学理论的控制方法,其核心是模糊推理。
在该方法中,将输入量和输出量分别表示为模糊集合,通过设计合适的模糊规则来实现控制。
该方法可以处理不确定性和模糊性等问题,适用于温湿度控制等多种应用场景。
3. 基于模糊控制的温湿度控制技术基于模糊控制的温湿度控制技术具有精度高、控制效果好、鲁棒性强等优点,已经在实际应用中得到广泛应用。
在该技术中,通过建立模糊控制系统,将温湿度控制过程抽象成模糊规则,通过模糊推理得到最终的控制结果。
同时,还可以采用自适应算法进行参数优化,提高控制性能。
4. 温湿度控制技术的应用基于模糊控制的温湿度控制技术已经广泛地应用于室内空气温湿度控制、温室温度控制等领域。
在实际应用中,根据具体的应用场景和要求,还可以对温湿度控制系统进行多种改进和优化,如增加噪声抑制算法、引入预测算法等。
综上所述,基于模糊控制的温湿度控制技术在当前的应用中具有广泛的优势和发展前景。
在未来的研究中,需要进一步加强该技术的可行性分析、系统设计和实验研究,为实际应用提供更高效、更可靠的控制方法。
基于MATLAB的温度模糊控制系统的设计
基于MATLAB的温度模糊控制系统的设计MATLAB是一种强大的数学计算软件,用于科学与工程领域的数据处理、分析和可视化等应用。
在温度控制系统设计中,模糊控制是一种常用的控制方法。
本文将介绍基于MATLAB的温度模糊控制系统的设计。
温度模糊控制系统的设计包括四个主要步骤:建立模糊控制器,设计模糊推理规则,模糊化与去模糊化以及系统仿真。
首先,建立模糊控制器。
在MATLAB中,可以使用Fuzzy Logic Toolbox工具箱来创建和管理模糊逻辑系统。
可以使用命令fuzzy,创建一个模糊逻辑系统对象。
在创建模糊控制器对象后,需要定义输入和输出变量。
输入变量可以是温度偏差,输出变量可以是控制信号。
然后,可以使用addInput和addOutput命令来添加输入和输出变量。
接下来,设计模糊推理规则。
在模糊推理中,需要定义一组规则来描述输入变量和输出变量之间的关系。
可以使用addRule命令来添加规则。
规则的数量和形式可以根据实际需求进行调整。
然后,进行模糊化与去模糊化。
模糊化是将模糊输入变量转换为模糊集,而去模糊化是将模糊输出变量转换为具体的控制信号。
可以使用evalfis命令进行模糊化和去模糊化。
模糊化使用模糊逻辑系统对象对输入变量进行处理,而去模糊化使用模糊逻辑系统对象对输出变量进行处理。
最后,进行系统仿真。
可以使用Simulink工具箱来进行系统仿真。
在仿真过程中,将温度控制系统与模糊控制器进行连接,然后通过给定的输入条件观察系统的响应。
可以利用Simulink中的Scope来显示温度的变化,并且可以通过模糊控制器来调整温度。
在设计温度模糊控制系统时,还需要考虑参数调节和性能评估等问题。
可以使用MATLAB中的优化工具箱对模糊控制器的参数进行调节,以获得更好的控制性能。
还可以使用MATLAB中的性能评估工具来评估系统的性能,例如稳定性、精度和鲁棒性等。
综上所述,基于MATLAB的温度模糊控制系统的设计包括建立模糊控制器、设计模糊推理规则、模糊化与去模糊化以及系统仿真等步骤。
《2024年基于模糊PID控制的电锅炉温度控制系统的研究》范文

《基于模糊PID控制的电锅炉温度控制系统的研究》篇一一、引言随着科技的发展,电锅炉作为现代供暖设备的重要组成部分,其控制系统的性能直接影响着供暖的效率和舒适度。
温度控制系统作为电锅炉的核心部分,其稳定性和准确性是保证电锅炉正常工作的关键。
传统的PID控制算法在电锅炉温度控制中已得到广泛应用,然而在某些非线性、时变性的复杂环境中,传统PID控制算法的控制效果并不理想。
因此,本研究将模糊控制理论与PID控制算法相结合,提出了一种基于模糊PID控制的电锅炉温度控制系统,以提高电锅炉的温控性能。
二、系统构成与工作原理本研究所提出的电锅炉温度控制系统主要由模糊PID控制器、电锅炉本体、温度传感器等部分组成。
其中,模糊PID控制器是本系统的核心部分,负责接收温度传感器的反馈信号,并根据预设的温度值对电锅炉进行控制。
系统的工作原理如下:首先,温度传感器实时检测电锅炉的水温,并将检测结果反馈给模糊PID控制器。
模糊PID控制器根据预设的温度值与实际温度值的差异,计算出控制量,并通过调节电锅炉的功率,实现对水温的精确控制。
三、模糊PID控制算法研究模糊PID控制算法是将模糊控制和PID控制相结合的一种控制算法。
该算法通过引入模糊控制理论,对传统PID控制算法进行优化,提高了系统的适应性和鲁棒性。
在模糊PID控制算法中,首先需要建立模糊规则库,包括输入变量的模糊化、输出变量的去模糊化以及模糊规则的制定等。
然后,根据实际温度值与预设温度值的差异,以及温差的变化率等参数,通过模糊推理机制计算出相应的控制量。
最后,将计算出的控制量作用于电锅炉,实现对水温的精确控制。
四、实验研究与结果分析为了验证基于模糊PID控制的电锅炉温度控制系统的性能,本研究进行了大量的实验研究。
实验结果表明,与传统的PID控制算法相比,基于模糊PID控制的电锅炉温度控制系统具有更好的稳定性和准确性。
在非线性、时变性的复杂环境中,该系统能够快速响应温度变化,实现对水温的精确控制。
基于模糊pid控制技术的仪表智能控温方法

基于模糊pid控制技术的仪表智能控温方法仪表智能控温是指通过各种传感器采集温度数据,并通过控制器进行处理和分析,从而实现对温度进行控制与调节。
其中,模糊PID控制技术是一种高级的控制方法,能够有效提高控制精度和稳定性,下面便来一步步地介绍基于模糊PID控制技术的仪表智能控温方法。
第一步,温度传感器的选取。
温度传感器的精度和灵敏度直接影响到整个控制系统的准确性和稳定性,因此需要选择适合的温度传感器。
目前常用的温度传感器有热电偶、热敏电阻和红外线传感器等,不同的传感器对应不同的控制器。
第二步,建立数学模型。
在建立数学模型时,需要研究被控被测对象的物理特性,将其构建为数学模型,以实现对温度的精确控制和调节。
在数学模型的构建过程中,可以采用系统辨识等方法来获取温度对控制参数的响应曲线等信息。
第三步,准备控制器。
一般情况下,控制器主要包括微处理器、数字信号处理器和专用集成电路等,其核心同样是PID控制算法。
而模糊PID控制技术则是在传统PID算法基础上引入模糊数学理论,利用模糊逻辑推理方法来调整控制算法的系数,以云控制精度和控制稳定性。
第四步,控制器参数的设置。
根据模糊PID控制技术的优点,需要在控制器中进行相应的参数设置。
控制器的参数设置包括模糊控制器的输出比例系数、比例阈值、微分时间常数、积分时间常数等。
第五步,温度控制的实现。
通过以上几个步骤,就可以开始实现温度控制。
在控制过程中,要注意掌握控制器和被控被测对象之间的响应特性,运用模糊PID控制技术及时调整控制器的参数,以实现更加精准的温度控制。
综上所述,基于模糊PID控制技术的仪表智能控温方法需要依次进行温度传感器的选取、数学模型的建立、控制器的准备及参数设置等步骤,在实现温度控制的过程中,要充分发挥模糊PID算法的优势,不断优化控制器的参数,以实现更加稳定、可靠的温度控制,满足不同工业生产及实验室环境下对温度控制的需求。
基于模糊控制算法的温度控制系统设计
机 电产 品 开 发白 刨 新
De v e l o p m e n t& I n n o v a t i o n o f Ma c h i n e r y& E l e c t i r c a l P r o d u c t s
0 引 言
Ab s t r a c t :T h e h o t wa t e r t e mp e r a t u r e i n t h e d i r e c t h e a t i n g b o i l e r i s s e l e c t e d a s t h e c o n t r o l l e d o b j e c t i n t h i s p a p e r . Wi t h t h e f u z z y c o n t r o l
关 键 词 : 模 糊 控 制 ; 温 度 控 制 ;M a t l a b
中 图 分 类 号 :T P 2 7 3
文 献 标 识 码 :A d o i : 1 0 . 3 9 6 9 / . i s s n . 1 0 0 2 — 6 6 7 3 . 2 0 1 3 . 0 3 . 0 5 5
( He n a n Un i v e r s i t y o f Te c h n o l o g y , Co l l e g e o f E l e c t r i c a l E n g i n e e i r n g , Zh e n g z h o u He n a n 4 5 0 0 0 1 , Ch i n a )
a n d t e mpe r a t u r e c on t r o l c omb i n i ng t o g e t he r f o r r e s e a r c h,t h e h a r d wa r e c i r c u i t d i a g r a m a nd s o f t wa re l f o w c ha r t a nd p r o ra g m re a d e s i g n e d a c — c or d i n g t o t he a c t u a l d e ma n d f o r c o nt r o 1 .The k e y b oa r d i s a pp l i e d t o i n p ut t e mpe r a t u r e a n d c o nt r o l LED d i s p l a y s y s t e m be t we e n t h e s e t t e m- pe r a t u r e a n d me a s ur e me n t t e mp e r a t ur e c o n ve si r o n.Th e c o r e d e s i n g o f t e mpe r a t u r e c o n t r o l s ys t e m i s b a s e d o n t he s i ng l e c h i p AT8 9C5 1 .At l a s t ,t he s i mu l a io t n s o f wa t r e Ma d a b i s a pp h e d t o c o mp a r e t he s i mu l a t i o n r e s lt u s b e t we e n uz f z y c o n t r o l a n d t r a d i t i o na l PI D c o n ro t 1 . Ke y wo r ds :f uz z y c on ro t l ;t e mp e r a ur t e c o n ro t l ;M a t l a b
基于模糊控制的PLC温度控制系统设计
基于模糊控制的PLC温度控制系统设计文/岑红蕾,李宏伟,聂 晶(石河子大学)摘 要:随着现代工业的发展,工业生产过程中涉及到的被控制对象越来越复杂,加之大量不稳定性、时变性和不确定性的存在,基于精准数学模型的传统控制方法已经难以满足控制要求。
模糊控制作为智能控制的一个分支,其高度的仿人类智能特性和不依赖精确数学模型的特点成为解决这类难控问题的一个重要方法。
本文通过对模糊控制器设计过程的分析,提出了基于 PLC 实现模糊控制的设计方法,给出了 PLC 程序设计的算法流程图及输入量量化程序、模糊控制表查询程序等关键步骤的梯形图。
仿真结果表明,用 PLC 实现的模糊控制器简单实用,具有较好的控制效果。
关键词:PLC;模糊控制;控制系统设计随着现代工业的发展,工业生产过程中涉及到的被控制对象越来越复杂,加之大量不稳定性、时变性和不确定性的存在,基于精准数学模型的传统控制方法已经难以满足控制要求。
模糊控制作为智能控制的一个分支,其高度的仿人类智能特性和不依赖精确数学模型的特点成为解决这类难控问题的一个重要方法。
模糊控制器是一种新型控制器,其优点是不要求掌握受控对象的精确数学模型,而根据人工控制规则组织决策表,然后由该决策表决定控制量的大小。
PLC是集成了微电子技术、计算机技术和自动控制技术等新技术的新型工业控制装置,将模糊控制器与PLC结合起来,扬长避短,既具有模糊控制灵活而适应性强的优点,又具有PLC可靠性高、参数监控修改方便、通讯便捷等优点[1]。
本文旨在将PLC和模糊控制系统有机地结合在一起,将模糊控制理论应用于工程实际,研究基于PLC 的模糊控制器设计方法,分析模糊控制算法以及模糊控制器的设计步骤,使用PLC查表法与MATLAB系统仿真相结合的方法解决基于PLC的模糊控制器设计问题,并通过一个实际对象的控制算法仿真,验证该系统有较好的控制品质。
采用 PLC来实现模糊控制,可充分利用PLC的计算性能,将使模糊控制在工业控制中发挥更大的作用[2]。
基于模糊逻辑的空调温度控制算法研究

基于模糊逻辑的空调温度控制算法研究一、引言随着现代科技的进步和人民生活质量的不断提高,空调这一产品已经成为了我们家庭生活、工作和娱乐等各种场合必不可少的一部分。
而空调作为温度控制的重要设备,其温度控制算法也不断得到完善和创新。
本文将围绕基于模糊逻辑的空调温度控制算法展开研究。
二、模糊逻辑的概念与应用模糊逻辑(Fuzzy Logic)是由L.A.Zadeh教授于1965年提出的一种能够处理不确定性和模糊性问题的数学方法。
其通过建立和运用模糊集合、模糊关系和模糊逻辑,来描述现实生活中那些具有模糊属性的问题,达到更加准确的处理效果。
因此,模糊逻辑在工程领域中被广泛应用,如智能控制、模式识别、优化决策等等。
三、空调温度控制算法研究空调温度控制算法的目的是将预先设定的温度值调节到合适的范围内,从而达到最佳的舒适度和节能效果。
传统的温度控制算法通常采用PID控制,即比例、积分和微分控制,利用反馈原理进行调节。
而基于模糊逻辑的空调温度控制算法则不同。
基于模糊逻辑的空调温度控制算法,主要分为两个部分:模糊化和解模糊化。
对于一个空调温度控制系统,其输入和输出都是连续的模糊变量,由此可得出其控制规则。
具体而言,对于温度来说,其模糊化包括了设定温度、当前温度和温度变化率三个方面,而对于空调来说,其模糊化则包括了风速、房间大小及当前状况等因素。
之后,利用具体的模糊控制规则,推导出系统所运行的决策规则。
最后,通过解模糊化的方法,将模糊输出转换成为具体的数值,从而实现对空调温度的控制。
四、算法效果分析模糊逻辑算法的优点在于它能够处理模糊变量和模糊规则,使得算法更易于理解和实现。
在空调温度控制算法中,基于模糊逻辑的算法通过考虑多个因素,如设定温度、当前温度、温度变化率等,使得系统更加稳定,方便用户调节温度,同时达到更好的节能效果。
在具体实现过程中,也可以通过调节不同温度设定点来达到更优的控制效果。
但是,模糊逻辑算法的缺点在于其计算复杂度较高,需要占用较多的计算资源和时间。
模糊控制实验报告

模糊控制实验报告1.引言随着科技的不断发展,模糊控制理论在控制系统中的应用越来越广泛。
模糊控制通过将精确的数学模型转化为模糊的规则,可以更好地适应复杂、非线性的控制系统。
本实验旨在通过设计一个模糊控制系统来实现对一个简单的水温控制过程的控制,以验证模糊控制在实际系统中的有效性。
2.实验原理本实验将一个简化的水温控制过程作为被控对象,控制目标是使得水温保持在一个设定的温度范围内。
水温的变化是由水流量和加热功率两个因素决定的。
因此,控制系统的输入变量为水流量、加热功率,输出变量为水温。
通过模糊控制器根据当前的水温及其变化率来调节水流量和加热功率,从而实现对水温的控制。
模糊控制器的输入变量为当前的水温和水温变化率,输出变量为水流量和加热功率的控制信号。
通过设定一系列模糊规则,模糊控制器可以根据当前的输入变量来决定输出变量的值,并调整其大小以实现对水温的精确控制。
3.实验步骤1)设定水温的设定值及其变化率,作为模糊控制器的输入变量。
2)使用模糊推理方法,通过设定一系列模糊规则,将输入变量映射到输出变量。
3)根据输出变量的值,调节水流量和加热功率的控制信号。
4)监测水温的变化,根据测量结果对模糊控制器进行调整,以提高控制的精度。
5)重复步骤3和4,直到水温稳定在设定的范围内。
4.实验结果经过多次实验,我们成功地设计出了一个能够稳定控制水温的模糊控制系统。
在不同的设定值和变化率下,模糊控制器都能够根据当前的输入变量来自适应地调节输出变量的值,使水温保持在设定的范围内。
通过对实验数据的分析,我们发现模糊控制系统具有较好的动态性能和鲁棒性。
在水温变化较快的情况下,模糊控制器能够及时地调整输出变量的值,使水温能够迅速回到设定的范围内。
而在水温变化较慢的情况下,模糊控制器能够稳定地控制输出变量的值,使水温能够保持在设定的范围内。
对比传统的PID控制器,我们发现模糊控制系统在对非线性系统和难以建模的系统进行控制方面具有明显的优势。
模糊控制的应用实例与分析
模糊控制的应用实例与分析模糊控制是一种针对模糊系统进行控制的方法,它通过运用模糊逻辑和模糊规则来进行控制决策。
模糊控制广泛应用于各个领域,以下是几个不同领域的模糊控制应用实例和相关分析。
1.模糊控制在温度控制系统中的应用:温度控制系统是模糊控制的一个常见应用领域。
传统的温度控制系统通常使用PID控制器,但是由于环境和外部因素的干扰,PID控制器往往不能很好地应对这些复杂情况。
而模糊控制可以通过建立模糊规则来实现对温度的精准控制。
例如,如果设定的温度为25度,模糊控制系统可以根据当前的温度和温度变化率等信息,通过判断当前温度是偏低、偏高还是处于目标温度范围内,然后根据这些模糊规则来决定是否增加或减少加热器的功率,从而实现温度的稳定控制。
2.模糊控制在交通信号灯控制中的应用:交通信号灯控制是一个动态复杂的系统,传统的定时控制往往不能适应不同时间段、不同拥堵程度下的交通流需求。
而模糊控制可以通过模糊规则来根据交通流的情况进行动态调整。
例如,交通信号灯的绿灯时间可以根据路口的车辆数量和流动情况进行自适应调整。
当车辆较多时,绿灯时间可以延长,以减少拥堵;当车辆较少时,绿灯时间可以缩短,以提高交通效率。
模糊控制可以将车辆数量和流动情况等模糊化,然后利用模糊规则来决策绿灯时间,从而实现交通信号灯的优化控制。
3.模糊控制在飞行器自动驾驶中的应用:飞行器自动驾驶是一个高度复杂的系统,传统的控制方法往往不能满足复杂的空中飞行任务。
模糊控制可以通过模糊规则来根据飞行器的状态和目标任务要求进行决策。
例如,飞行器的高度控制可以利用模糊控制来应对不同高度要求的任务。
通过将目标高度和当前高度模糊化处理,然后利用模糊规则来决策飞行器的升降舵和发动机功率等参数,从而实现对飞行器高度的精准控制。
综上所述,模糊控制作为一种针对模糊系统进行控制的方法,具有很大的应用潜力。
它可以通过建立模糊规则来解决传统控制方法难以解决的复杂问题。
虽然模糊控制存在一些问题,如规则的设计和调试等工作比较困难,但是随着计算机技术的发展和模糊控制理论的不断完善,模糊控制在各个领域中的应用将会越来越广泛。
基于模糊控制算法的变频空调控制系统设计与实现
基于模糊控制算法的变频空调控制系统设计与实现变频空调控制系统是现代空调系统中的一种重要控制方式,通过调节空调压缩机的转速来实现室内温度的控制。
在传统的空调系统中,常常存在着温度波动大、能耗高、控制精度低等问题。
为了解决这些问题,本文基于模糊控制算法对变频空调控制系统进行了设计与实现。
文章将分为以下几个章节进行阐述。
第一章:绪论本章将对变频空调控制系统的研究背景和意义进行阐述,介绍了传统变频空调系统存在的问题,并提出了基于模糊控制算法来改善这些问题的思路和方法。
第二章:变频空调系统原理与模型本章将介绍变频空调系统的工作原理和数学模型。
首先对压缩机、蒸发器、冷凝器等主要组成部分进行详细介绍,然后建立起整个变频空调系统的数学模型,并分析其特性和参数。
第三章:模糊控制基础理论本章将介绍模糊逻辑理论和模糊控制算法的基础知识。
首先介绍了模糊逻辑中的模糊集合、模糊关系和模糊推理等基本概念,然后详细介绍了模糊控制器的结构和工作原理。
第四章:基于模糊控制算法的变频空调控制系统设计本章将详细介绍基于模糊控制算法的变频空调控制系统的设计过程。
首先确定了系统输入和输出变量,然后建立了基于模糊规则库的推理机制,最后设计了基于PID控制器和模糊逻辑控制器的混合控制策略。
第五章:变频空调系统实验与仿真本章将对设计好的变频空调系统进行实验与仿真。
首先搭建了实验平台,并进行了实验数据采集和分析。
然后使用仿真软件对系统进行建模,并进行仿真实验。
最后对实验结果进行分析比较,验证了基于模糊控制算法的变频空调系统在温度稳定性、能耗等方面相较传统系统有明显改善。
第六章:结论与展望本章将总结全文内容,总结论文工作中取得的成果,并对未来进一步改进和优化变频空调控制系统提出展望。
通过以上章节的阐述,本文将全面深入地介绍基于模糊控制算法的变频空调控制系统的设计与实现。
通过实验与仿真结果的分析,将验证该系统在改善温度稳定性、降低能耗等方面的有效性。
基于PAC的温度模糊控制系统设计
行 结果 表 明 ,本 文 提 出的 方法 比传 统P I D控制 方 法
具 有更 好的控 制效 果 。
1 系统 结构
基 于 PAC的 温 度 控 制 系 统 以 通 用 电 气 的
P AC S y s t e ms R X3 i 型P A C为 控 制 核 心 , 由P AC的 模拟 量 输 出模块 I C 6 9 5 AL G7 0 4 、模 拟 量 输入 模 块 I C 6 9 5 A L G6 0 0 , 以太 网通 讯 模 块I C 6 9 5 E T MO 0 1 ,
需 要 建 立 被 控 对 象 的 精 确数 学模 型 , 因而 使 得 控 制 机 理 和 策 略 易 于 接 受 与理 解 ,设 计 简单 ,便 于
应 用 ,尤 其 适 合 于 非 线性 、时 变 及 纯 滞 后 系统 的 控制 。 模 糊控 制器 的设 计 包括如 下 步骤 :
系统 ,并 将 它 应 用于 过 程 控 制 实 训 装 置 。系统 运
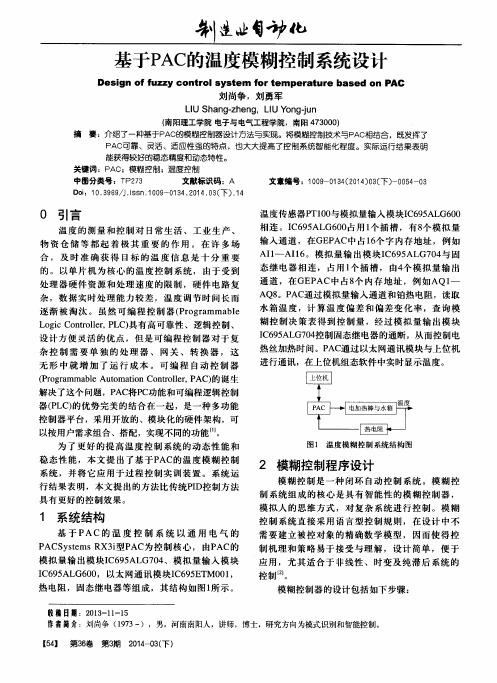
图 1 温 度 模 糊 控 制 系统 结 构 图
2 模糊控 制程序设计
模 糊 控 制 是一 种 闭 环 自动 控 制 系统 。模 糊 控 制 系统 组 成 的核 心 是 具 有 智 能 性 的 模 糊 控 制器 , 模 拟 人 的 思维 方 式 ,对 复 杂 系 统 进 行 控 制 。模 糊 控 制 系统 直 接 采 用 语 言 型 控 制规 则 , 在设 计 中 不
I
I I 5 化
基于P A C 的温 度模 糊控制 系统设 计
De si gn of f uz z y con t r ol s ys t em f or t em per at ur e bas ed on P A C
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)当0≤∞≤%≤0.1时,则对误差的控制作用的权重非 常小,而对误差变化的控制作用的权重非常大,使得控制效果
万方数据
存在较大的误差,且过渡过程时间长。 (2)当0.1≤al≤ah≤0.5时,对误差的控制作用的权重比
较小,对误差变化的控制作用权重比较大,控制效果仍存在误 差,过渡时间过程稍长。
(3)当0.5≤口.≤a。≤1时,对误差的控制作用的权重较 大,对误差变化的控制作用的权重比较小,控制效果虽然误差 很小,但对误差变化的控制不够,过渡过程的时间过长,甚至引 起振荡现象。
PS
PM PM ZE NS NM NB NB
PM
ZE ZE NS NM NM NB NB
PB
ZE ZE NS NM NM NB NB
设计采用Mamdani方法推理方法进行推理。 由于模糊控制器输出是一个模糊集合,它无法对精确的模 拟或数字系统进行控制。因此,必须进行精确化计算得出此模 糊集中最有代表意义的确定值作为系统的输出控制,主要方法 有:最大隶属度法、取中位数法、加权平均法等,该设计采用重 心法,即加权平均法。 模糊控制器的实现方法就是将上述一系列模糊控制规则 离线化为一个查询表,存储在计算机中供在线控制实时使用。 1.3调整因子的选择 虽然误差以及误差变化率对控制量的权重可以自动调整, 但是%和Ot。的选择对整个控制系统的控制效果仍然存在着较 大的影响。
由此可以得到,除氧器温度模糊控制器的误差量化因子恐
=6/3=2,误差变化率的量化因子k=6/1=6。量化因子使得
输入量实现了从基本论域变换到模糊集论域的作用,即由基本 论域中的任意一点通过量化因子映射到模糊集论域中最相近 的整数点。
此外,经模糊控制算法给出的控制量还不能直接控制对 象,必须将其转换到为控制对象所能接受的基本论域中去。通 常选取一个比例因子K把控制量的模糊集论域变换到基本论 域中。若控制量的基本论域为[墨幽,x。~],量化后的论域为
经过反复验证确定当a。=O.8和“。=0.2时除氧器的控制 效果最佳,因此在除氧器控制系统中调整因子为0.8和0.2。 2 PID控制器的设计
PID控制由比例、积分和微分控制组合而成;连续系统的 PID控制算式表示为:
比(c)=kp[e(¨古厂e(f)山+死掣] (1)
式中:H(t)为调节器输出值;e(t)为输入偏差;K为调节比例系 数;I,死分别为调节器积分、微分时间常数。
reover,the simulation results show that its robustness is good,because effective control makes the regulating time short,the over- shoot and the steady—error very little.
模糊温度控制系统的结构框图如图l所示,系统由被控对
收稿Et期:2010-03—15收修改稿日期:2010—08一13
万方数据
象、温度传感器、比较器、模糊控制器和执行机构等部分组成。
一f=二二二l L—一A/D转换:H隔离放大H检测变换H除氯嚣温度h-J
图1 除氧器温度控制系统方框图 除氧器的温度由温度传感器检测,并转换成4—20 mA的 标准电流信号,在经过电压转换装置,转换成0~5 V的电压信 号,送入单片机的模拟输入通道,进行A/D转换,然后送给模糊 PID控制器,控制器将转换值与给定值作比较,计算出温度误差 以及温度误差的变化率,根据模糊PID控制算法求出控制系统 的控制输出量,经D/A转换器进行数模转换后驱动执行器工 作,调节除氧器水箱的温度,使除氧器温度恒定在给定值。 1.2带自调整因子的模糊控制器的结构设计 文中模糊控制器采用带自调整因子的模糊控制器,即以温 度的误差和温度误差的变化为输入量,以控制量的变化(电磁 阀的开度)为输出量。充分利用该控制器的灵活性,对除氧器 温度控制系统进行精确、快速、稳定的控制。该控制方法,从工 程实际应用角度提出了一种有效的改善方法,使模糊控制规则 可以得到在线调整,极大地改善了模糊控制的效果在这种规则 自校正模糊控制器中,采用了一种在线的模糊推理算法。能从 本质上消除模糊量化误差和调节死区给模糊控制系统带来的 稳态误差与颤振现象,显著地改善模糊控制系统的稳态性能。 根据除氧器的实际工作情况,考虑到传感器的误差,将温 度误差e的基本论域取为:[一3℃,3℃],温度误差变化的基
2010正 第11期
仪表技术与传成器
Instrument Technique and Sensor
2010 No.1l
一种基于模糊控制的温度控制系统设计
张小娟 (宝鸡文理学院电子电气工程系,陕西宝鸡721016)
摘要:针对被控对象存在的滞后、时变、非线性等特点,将模糊控制算法引入除氧器控制系统,改善了系统的控制效
Abstract:According tO the characteristic of delay,non·linearization and time-variable of controlled objects,a control strategy in combination of fuzzy control was employed to temperature controlling algorithm with the chip PICl8F252 as the key part and the controlling method Was realized.The application of this scheme in the deaerator system achieves good effects.First,simulations of PID control and with self-adjusting factor Fuzzy control concerning their respective control quMity were done by MATLAB 6.5.Mo-
果,并设计了以PICl8F252单片机为核心,实现了该控制方案。该控制方法在除氧器温度控制系统的应用中,取得了良好 的效果。文中使用MATLAB软件对PID控制、带自调整因子模糊控制分别进行了仿真研究,仿真结果表明,带自调整因
子模糊控制能满足调节时间短、超调量小且稳态误差在104±3℃内的控制要求。
目前,锅炉中常用的除氧方法是热力除氧。由于热力除氧 器系统具有大滞后、大惯性、非线性等特点,采用传统的PID控 制方法,PID控制稳态性能好,但动态特性不太理想;而模糊控 制动态响应品质优良,但存在稳态性能差的问题。因此,文中 采用了带自调整因子模糊控制算法进行控制,以达到除氧的目 的,从而保证热力设备能安全经济运行。 1控制器的设计 1.1热力除氧条件要求
离散化后的调节器输出为
“(%r)=kp{e(&r)+彘磊e(,)+芦8(如r)一e(_j}r—r)]}
(2)
式中:.i},为比例系数;后i=t,寺为积分系数;r为采样周期;钆=
k,下s d为微分系数。
G㈤=蒜e山 利用飞升曲线法测量被控对象的传递函数为
(3)
增量式PID算法为:
△M(kT)=k。[e(kT)一e(kT—r)+kie(kT)+kd[e(kT)一
Key words:deaerator;temperature control;fuzzy control;micro·controller;adjustment factor
0引言 锅炉给水中溶解有氧、氮、二氧化碳等气体,其中二氧化碳
和氧气的存在,对于锅炉就易发生腐蚀。氧气是很活泼的气 体,能跟很多非金属直接化合,而且能跟绝大多数金属直接化 合。当其与非金属或金属化合以后,往往形成稳定的氧化物, 或生成沉淀,对锅炉起腐蚀作用。故须对锅炉给水进行除氧。
图4 Pm的仿真图 从上面的仿真曲线可以看出,PID控制器的响应时间约为 70 s,超调量约为4.3%,系统无稳态误差;带调整因子模糊控制
l
设置输入.输出量的论域及初值 ●
读取给定值和当前测量值
+
计算误差及误差变化率
+ l计算误差及误差变化率的隶属度函数
查询模糊规则表。代入调整因子 山
输出控制量并解横模糊化
图3模糊控制算法流程图 5仿真结果
为了说明带调整因子模糊控制的优劣性,利用Simulink模 块分别对PID控制算法和带调整因子模糊控制算法进行仿真, 比较其仿真结果,仿真结果如图4、图5所示。
器 输出电路H D/A转换
圈2除氧器温度控制系统的硬件结构图 输入采集部分主要完成信号的测量、隔离、放大和转换等 任务。控制输出部分是把控制器输出的控制量作用于执行机 构上,实现对除氧器的控制。控制决策部分采用的通用的数字 单片机及其外围电路来实现,该部分是根据除氧器系统的工
况、测量内容、显示方式等要求设计的,也是硬件电路设计的核 心内容。系统采用的单片机是PICl8F252。
关键词:除氧器;温度控制;模糊控制;单片机;调整因子
中图分类号:TPl83
文献标识码:B
文章编号:1002—1841(2010)11—0076—03
Design of Temperature Control System Based on Fuzzy Control
ZHANG Xian-juan Department of Electronics&Electricity Engineering,Baoji CoHege of Arts&Science,Baoji 721016,China)
根据现场调节经验,控制器采用如表1所示模糊控制规则。 表1 除氧器温度模糊控制规则表
E
NB NM NS ZE PS PM PB
NB
PB PB PM PM
NS
PB PB PM PS ZE NM NM
EC
ZE PB PB PM ZE NM NB NB