加工中心全部的报警说明
哈斯加工中心报警列表

圆盘传动装置或刀臂被启动,而且以下的不正确条件中有一个或多个条件存在:
刀具圆盘传动装置已在运动中,已检测到1号刀具标记,但朝向芯轴的当前护套不在护套1的位置,或者当前护套是在护套1的位置但没有检测到刀具1标记。
变换器臂正从原始位置向CLAMP(夹紧)位置移动并已滑过MOTOR STOP(电动机停止)点或无法抵达CLAMP(夹紧)点。
变换器臂正从CLAMP(夹紧)位置向UNCLAMP(松开)位置移动并已滑过MOTOR STOP(电动机停止)点或无法抵达UNCLAMP(松开)点(与夹紧点为同一物理点)。
变换器臂正移回ORIGIN(原始)点并已滑过MOTOR STOP(电动机停止)点或无法抵达ORIGIN(原始)点。
加工中心全部的报警说明
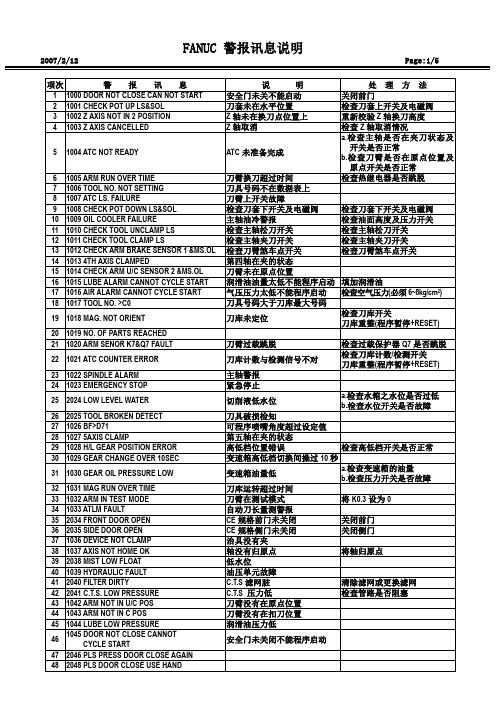
FANUC 警报讯息说明MITSUBISHI 刀臂式机器警报讯息2007/2/12 Page:2/5FANUC 0i-TC车床警报讯息说明FANUC LH 警報訊息說明臥式ATC原點校正臥式ATC PMM GEAR PARAMETER設定PMM參數P105=0,P179=36000,P141=36000P106=?EXAMPLE:刀庫總刀數P68=40,60刀庫齒輪轉一圈刀庫位移十(九)把刀,BT50每位移一把刀,馬達所需轉速,速比1:120(1:108)位移一把120/10=12(108/9=12), P106=(刀庫總刀數40 )X 12(位移一把=12)=480 (刀庫總刀數60 )X 12=720BT40每位移一把刀,馬達所需轉速,速比1:90位移一把90/9=10, P106=(刀庫總刀數60 )X 10(位移一把=10)=600若P106值太大則P179=360000,P141=360000(PMM417Alarm), 刀庫總刀數P68=60,P31=-111P11#0=1 APC,P12#1=0 Automatic parameter setting,P125=Motor type 272P40=100x10,P41=80x10,P43=200x10(刀庫總刀數=60 )P1#4=1,P40=700,P41=500,P43=2000,P68=60,P106=720,P141=360000,P179=360000(刀庫總刀數=40 )P1#4=1,P40=80,P41=50,P43=200,P68=40,P106=480,P141=36000,P179=360001.開機 1077 MAG MOTOR ALARM1078 MAG BATTERY ALARMPMM->MSG 000 319 3502.K13.0=1用手輪移動一個以上刀套(P9989#1=1 PMM,MPG FUN.)MAG-KEY 在Manual位置關機再開目前用此方式K13.2=1 JOG Mode,X5.2=1(MAG Key=manual),用X5.3(MAG CW)X5.4(MAG CCW)移動一個以上刀套MAG-KEY 在Manual位置關機再開用JOG移動校正OK(JOG速度P41=5~10)PMM PARAMETER->11#0設1關機再開K13.2=0正常MAG JOG One pitch移動每位移一把刀,馬達所需轉速,BT40速比1:100位移一把100/10=10(刀庫總刀數60 )X 10=600->P106值=100P105值=0, P179值=3600003.ALARM 1078消失用手輪移動校正OKPMM PARAMETER->11#0設1關機再開4.ALARM 1077消失K13.0=05.PMM 950 alarmDC24V由ON/OFF RELAY 控制AC220V由K1A 控制1. A.Function=2 Data=1 Y72=33 Mode=Auto Y70=001 Start=ST(T-code)B.Function=2 Data=4 Y72=36 Mode=Jog Y70=101 Start=+x,-x(Jog one pitch)K2.1=0押Mag.CW-key Run, 放開Mag.CW-key Mag. Stop in-correct POS.(連續運轉)K2.1=1押Mag.CW-key Run, 放開Mag.CW-key Mag. Stop in-nocorrect POS.(one pitch step by step)C.Function=4 Data=1 Y72=65 Mode=Jog Y70=101 Start= STK13.2=1,K15.4=1 Jog Mag.key-in Manual,押主軸停止鍵1sec後放開 Mag. Return to 1 POS. D2=1D.Function=4 Data=15 Y72=79 Mode=Jog Y70=101 Start= STK13.2=1,K15.5=1 Jog Mag.key-in Manual,押主軸停止鍵1sec後放開 Mag. PMM 000 alarm P11#0=1setting HOME OKE.Function=0 Data=0xxxx Y72=0 Mode=Jog Y70=101 Start=+x,-xK13.2=1押Mag.CW-key Run, 押W-key Stop錯誤修正K13.2=1押Mag.CW-key Run, 放開Mag.CW-key Mag. Stop(注意D2不會更動)+XK13.2=1押W-key Run, 放開W-key Mag. Stop(注意D2不會更動)-X 用PMM#41=5 JOG移動刀庫取代MPGD0=Spindle NO., D1=Wait tool NO. D2=Mag. current NO. D3=T-command code NO臥式APC手動找尋O9000程式號碼,且自動跳至自動執行G7.2(ST)=1P6300#4(ESR)=1P3202#6(PSR)=1D100=90D101=00P6071=6(M6 ARM換刀)O9001P6072=100(M100 APC自動更換)O9002P6073=101(M101 APC PA-IN更換)O9003P6074=102(M102 APC PB-IN更換)O9004O9000(APC-MAN.)(D100=90,D101=00)#3003=1G4IF[1013EQ1]GOTO99(MLK)M98P9002N99#3003=0M30O9001(M6-ATC)(P6071=6)#3003=1G4IF[#1008EQ1]GOTO99 (TF=SP)IF[#1013EQ1]GOTO99 (MLK)#130=#4003#131=#4006G91G30Z0G30X0Y0M6M88(DOOR CLOSE)G#130G#131M05(M05取消M03記憶)N99#3003=0M99O9002(M100-APC)(P6072=100)#3001=1G4IF[#1013EQ1]GOTO99 (MLK)M71(APC CHECK)#130=#4003#131=#4006G91G30Z0IF[#1011EQ1]GOTO2(ZP4 OK)IF[#1012NE1]GOTO1(1=0.001 Degree) M41G91G28B0M40GOTO2N1G91G28B0N2M40M72(PALLET UNCLAMP)G4X2.M74(PALLET UP)G4X1.IF[#1009EQ1]GOTO3(PA NOW IN)M76(PA->IN)G4X1.GOTO4N3M77(PB->IN)G4X1.N4M75(PALLET DOWN)G4X1.M73(PALLET CLAMP)G#130G#131N99#3003=0M99O9003(M101-PA-in)(P6073=101)#3003=1G4IF[#1013EQ1]GOTO99IF[#1009EQ1]GOTO99M98P9002N99#3003=0M99O9004(M102-PB-in)(P6074=102)#3003=1G4IF[#1013EQ1]GOTO99IF[#1010EQ1]GOTO99M98P9002N99#3003=0M99EXE M100若停在M74(APC-UP)因APC-UP(X11.2)APC-DOWN(X11.3)同時為1把K11.0=1(解除APC-SOL自保)K14.0=1(解除APC-NOT READY)K14.7=1(解除APC-OK ENABLE)關電再開使APC回位OK後K11.0=0,K14.0=0,K14.7=0X12.1=0 M72 APC UNCLAMPX12.1=1 M73 APC CLAMPX12.1(接1.2 NO)X12.1=0 M72 APC UNCLAMP Y7.6=1 AIR CLEANX11.7(接1.3 NO)氣密檢知K14.1=1X12.1=0 M72 APC UNCLAMP Y7.6=1 AIR CLEAN ON X11.7=1(有風)X12.1=1 M73 APC CLAMP Y7.6=0 AIR CLEAN OFF X11.7=0(無風)若X11.7沒有0->1->0則AL1048 AIR TIGHT ALARMK14.0=1(解除APC-NOT READY)不可設1否則AL1048 AIR TIGHT ALARM不會出現X11.7有風無1則AL1048 AIR TIGHT ALARM Y7.6=1 AIR CLEAN ONK14.2=1解除AL1048 AIR TIGHTDATA BCD,BIN選擇由PMCRPM設定 D0~D1024 Bit可作斷電自保COUNTER BCD,BIN選擇由Ladder3設定臥式位置開關保護K15.2=1取消位置開關保護3-AXIS 皆入設定範圍則保護+X.-X,-Y,-Z G132.0,G134.0,G134.1,G134.2=1 不保護+Y,+Z G132.1,G132.2=0P6930,P6950=X(0,-700000)P6931,P6951=Y(-500000,-650000)P6932,P6952=Z(-400000,-650000)。
加工中心全部的报警说明

2007/2/1Page:1/2007/2/12 MITSUBISHI刀臂式机器警报讯息Page:2/52007/2/1Page:3/FANUC0i-TC 车床警报讯息说明2007/2/12 FANUCOi-TC车床警报讯息说明page^ 警报说明:FANUC0i-TC 车床警报讯息说明2007/2/12 Page:5/5警报说明:FANUCLH警报讯息说明2008/01/17卧式原点校正卧式ATCPMMGEARPARAMETER 设定PMM 参数P105=0,P179=36000,P141=36000P106=?EXAMPLE:刀库总刀数P68=40,60刀库齿轮转一圈刀库位移十(九)把刀,BT50每位移一把刀,马达所需转速,速比1:120(1:108)位移一把120/10=12(108/9=12), P106=(刀库总刀数40)X12(位移一把=12)=480(刀库总刀数60)X12=720 BT40每位移一把刀,马达所需转速,速比1:90位移一把90/9=10, P106=(刀库总刀数60)X10(位移一把=10)=600若P106 值太大则P179=360000,P141=360000(PMM417Alarm),刀库总刀数P68=60,P31=-111P11#0=1APC,P12#1=0Automaticparametersett in g,P125=Motortype272P40=100x10,P41=80x10,P43=200x10(刀库总刀数=60)P1#4=1,P40=700,P41=500,P43=2000,P68=60,P106=720,P141=360000,P179=360000(刀库总刀数=40)P1#4=1,P40=80,P41=50,P43=200,P68=40,P106=480,P141=36000,P179=360001.开机1077MAGMOTORALARM1078MAGBATTERYALARMPMM->MSG000319350用手轮移动一个以上刀套(P9989#1=1PMM,MPGFUN.)MAG-KEY 在Manual 位置关机再开目前用此方式K13.2=1JOGMode,X5.2=1(MAGKey=manual), 用X5.3(MAGCW)X5.4(MAGCCW) 移动一个以上刀套MAG-KEY 在Manual 位置关机再开用JOG 移动校正OK(JOG 速度P41=5~10)PMMPARAMETER->11#0 设1关机再开K13.2=0 正常MAGJOGOnepitch 移动每位移一把刀,马达所需转速,BT40 速比1:100位移一把100/10=10 (刀库总刀数60)X10=600->P106 值=100P105 值=0,P179 值=3600003.ALARM1078 消失用手轮移动校正OKPMMPARAMETER->11#0 设1关机再开4.ALARM1077 消失K13.0=05.PMM950alarmDC24V 由ON/OFFRELAY 控制AC220V 由K1A 控制1. A.Function=2Data=1Y72=33Mode=AutoY70=001Start=ST(T-code)B.Function=2Data=4Y72=36Mode=JogY70=101Start=+x,-x(Jogonepitch)K2.1=0 押Mag.CW-keyRun, 放开Mag.CW-keyMag.Stopin-correctPOS.( 连续运转)K2.1=1 押Mag.CW-keyRun, 放开Mag.CW-keyMag.Stopin-nocorrectPOS.(onepitchstepbystep)C.Function=4Data=1Y72=65Mode=JogY70=101Start=STK13.2=1,K15.4=1JogMag.key-inManual, 押主轴停止键1sec後放开Mag.Returnto1POS.D2=1D.Function=4Data=15Y72=79Mode=JogY70=101Start=STK13.2=1,K15.5=1JogMag.key-inManual,押主轴停止键1sec後放开Mag.PMM000alarmP11#0=1 settingHOMEOK E.Function=0Data=0xxxxY72=0Mode=JogY70=101Start=+x,-xK13.2=1 押Mag.CW-keyRun, 押W-keyStop 错误修正K13.2=1 押Mag.CW-keyRun, 放开Mag.CW-keyMag.Stop (注意D2 不会更动)+XK13.2=1 押W-keyRun, 放开W-keyMag.Stop (注意D2 不会更动)-X用PMM#41=5JOG 移动刀库取代MPGD0=SpindleNO.,D1=WaittoolNO.D2=Mag.currentNO.D3=T-commandcodeNO卧式APC手动找寻O9000 程式号码,且自动跳至自动执行G7.2(ST)=1P6300#4(ESR)=1P3202#6(PSR)=1D100=90D101=00P6071=6(M6ARM 换刀)O9001P6072=100(M100APC 自动更换)O9002 P6073=101(M101APCPA-IN 更换)O9003 P6074=102(M102APCPB-IN 更换)O9004 O9000(APC-MAN.)(D100=90,D101=00) #3003=1G4IF[1013EQ1]GOTO99(MLK)M98P9002N99#3003=0M30O9001(M6-ATC)(P6071=6)#3003=1G4IF[#1008EQ1]GOTO99(TF=SP)IF[#1013EQ1]GOTO99(MLK)#130=#4003#131=#4006G91G30Z0G30X0Y0M6M88(DOORCLOSE)G#130G#131M05(M05取消M03记忆)N99#3003=0M99O9002(M100-APC)(P6072=100) #3001=1G4IF[#1013EQ1]GOTO99(MLK)M71(APCCHECK)#130=#4003#131=#4006G91G30Z0IF[#1011EQ1]GOTO2(ZP4OK)IF[#1012NE1]GOTO1(1=0.001Degree)M41G91G28B0M40GOTO2N1G91G28B0N2M40M72(PALLETUNCLAMP)G4X2.M74(PALLETUP)G4X1.IF[#1009EQ1]GOTO3(PANOWIN)M76(PA->IN)G4X1.GOTO4N3M77(PB->IN)G4X1.N4M75(PALLETDOWN)G4X1.M73(PALLETCLAMP)G#130G#131N99#3003=0M99O9003(M101-PA-in)(P6073=101)#3003=1G4IF[#1013EQ1]GOTO99IF[#1009EQ1]GOTO99M98P9002N99#3003=0M99O9004(M102-PB-in)(P6074=102)#3003=1G4IF[#1013EQ1]GOTO99IF[#1010EQ1]GOTO99M98P9002N99#3003=0M99EXEM100 若停在M74(APC-UP)因APC-UP(X11.2)APC-DOWN(X11.3)同时为1把K11.0=1(解除APC-SOL 自保)K14.0=1(解除APC-NOTREADY)K14.7=1(解除APC-OKENABLE)关电再开使APC 回位OK 後K11.0=0,K14.0=0,K14.7=0X12.1=0 M72APCUNCLAMPX12.1=1 M73APCCLAMPX12.1(接1.2NO)X12.1=0 M72APCUNCLAMPY7.6=1AIRCLEANX11.7(接1.3NO)气密检知K14.1=1X12.1=0 M72APCUNCLAMPY7.6=1AIRCLEANONX11.7=1(有风)X12.1=1 M73APCCLAMPY7.6=0AIRCLEANOFFX11.7=0(无风)若X11.7 没有0->1->0 则AL1048AIRTIGHTALARMK14.0=1(解除APC-NOTREADY)不可设1 否则AL1048AIRTIGHTALARM不会出现X11.7 有风无1 则AL1048AIRTIGHTALARMY7.6=1AIRCLEANONK14.2=1 解除AL1048AIRTIGHTDATABCD,BIN 选择由PMCRPM 设定D0~D1024Bit 可作断电自保COUNTERBCD,BIN 选择由Ladder3 设定卧式位置开关保护K15.2=1 取消位置开关保护3-AXIS 皆入设定范围则保护+X.-X,-Y,-ZG132.0,G134.0,G134.1,G134.2=1 不保护+Y,+ZG132.1,G132.2=0 P6930,P6950=X(0,-700000)P6931,P6951=Y(-500000,-650000)P6932,P6952=Z(-400000,-650000)。
加工中心常见报警及解决方法

会存在其他报警因素,请根据该报警内容进行处理
。
T01 0103报警 复位中
关闭复位输入信号。
检查复位开关是否由于故障原因一直停留在打开位置上。
检查PLC程序。
T01 0104报警 进给信号打开
调整进给保持开关。
进给保持开关B接点
检查进给保持信号线是否破损。
检查PLC程序。
T01 0105报警 超过硬件行程极限
若轴端发生超过行程极限,通过手动操作使轴移动。
检查超过行程极限信号线是否破损。
检查超过行程极限开关是否有故障。
T01 0106报警 超过软件行程极限
用手动使轴移动。若不是轴端,则确认参数内容。2013,2014
T01 0107报警 无法运转类型
选择自动运转类型。
,1222BIT3位设定为0,在此情况下准备参数区域的参数可以自由设定;②,R1896
设定为0,1222BIT3位设定为1,此时准备参数中的参数被锁定,不能更改.
〈四〉传输问题
P460纸带输出错误读带机发生报警
检查电缆线焊接是否正确
接头是否有松动
COM1端口
电脑主机插头是否为
机床参数及电脑传输软件参数 否为标准值参考(参考下图)
100
9107
3
9115
0
9108
3
9116
10
8109
0
电脑软件传输速度
19200BIT
电脑端口
COM1
,P462纸带输出错误
检查电缆线焊接是否正确
接头是否有松动
COM1端口
电脑主机插头是否为
机床参数及电脑传输软件参数是否为标准值参考(参考上图)
加工中心常见报警及解决方法

旺磐加工中心的常见报警解决方法序号报警内容含义解决方法<一> plc报警问题LUB LOW (油量过少)检查润滑油泵的油位检查油位传感器是否正常检查油位报警线路电源及输入电路是否正常(号码管为DC24V及LUBLOW)1.2 COOLANT OVERLOAD (切削液马达过载)检查动力线是否有缺 ,检查电源电压是否为额定电压过载保护器的过载系数是否设定过小,正常为马达是否为反转或者有烧毁将上序问题排除后,将过载保护器上的复位按钮按下,再确定信号线是否有24V电源输入(号码管为COOLANT OVERLOAD)AXIS NOT HOME (3轴未归零)在原点复归模式下分别将三轴归零,归完成报警信号即完成零ATC NOT READY 刀库未准备好刀库记数信号未到位,检查COUNTER信号刀杯原位信号错误,检查TOOL CUP UP 信号刀臂持刀点位置不正确,检查121点信号THE CLAMP SIGNAL ERROR (夹刀信号错误)检查夹刀到位信号线是否有异常检查打刀缸夹刀开关是否正常检查I/F诊断中X4的信号是否为1AIR PRESSURE LOW (空气压力低)检查空气压力是否5MP以上检查空气压力输入信号的线路是否有DC24VV电压ATCCOUNTERSINGALERROR (刀库记数信号错误)检查是否为记数信号接再刀库的144点上。
检查DC24电源144点与0V点之间电压是否为24V,确定I/F诊断中的X1E点信号是否正常!THE SP-MOTOR OVERLOAD (主轴马达过载)主轴马达过载,检查回升电阻AL1与AL2间是否为通路检查PLC输入信号是否有24VPLC计时器不能工作参数被锁住将6449BIT0位参数设定为0PLC计数器不能工作参数被锁住将6449BIT1位参数设定为0PLC报警无法显示为用户定义形式参数锁住将6550BIT0位和BIT2位设定为1主轴无法转动(无信号显示)如果是使用面板启动主轴正转时,则检查是否是在手轮方式,然后检查打刀缸上面的紧刀信号是否到位(即I/F诊断中的点X4是否为1),如果此两点信号全部到位,主轴还是无法转动,则检查报警界面是否有伺服报警。
加工中心报警信息表

SPECIFIED POT IS NOT INDEXED
PER0124
The pot specified by T-code has not been indexed at change position during ATC cycle.的?锅?指定的??T-CODE?已经?不?被?索引?在?改变? ATC?周期中的位置。
EX0256
MAGAZINE INDEX TIME OVER
PER0256
Magazine indexing cycle time has been over.
EX0296
SERVO ALARM (MAGAZINE)
PER0296
Alarm of servo motor(magazine).
EX0298
EX0013
主轴或旋转刀具主轴接通
PER0013
在主轴或旋转刀具主轴旋转期间,就已经发出了一个自动门打开指令。
EX0018
所有的轴都需要回零
PER0018
在机床锁紧取消之后,没有进行所有轴的回零,就起动了一个循环开始。
EX0019
工件计数器处于满数
PER0019
PC或外部工件计数器已经数满时,还是起动了一个循环开始。
EX0240
EMPTY POT HAS TOOL DATA
PER0240
Tool data is set for the empty pot during ATC cycle. Tool data is not properly set.
EX0243
ERROR
PER0243
Number of tools is not properly set in the parameter.
丽驰加工中心指示灯说明
丽驰加工中心指示灯说明
1、电流大导致机床报警,发生大电流报警一般情况下有两种可能,就是加工中心数控速度控制单元上的功率驱动元件损坏和短路所造成大电流报警。
2、高电压也会导致机床报警,发生高电压报警的情况一般有三种可能,可能是加工中心数控输入电压超过了额定值的百分之十,或是伺服电机里面的绝缘性能下降,或是加工中心运转速度控制单元的线路引起的高电压。
3、电压过低导致机床报警,加工中心发生这样的概率是少之又少了,发生这种情况可能是输入的电压低于额定值的百分之八十五,或是电源连接不良引起。
4、检测速度的反馈路线断导致报警,发生这种情况是错误报警,因为机场本事是没有问题的,而且检测反馈系统出现了问题,发生这种报警大多是加工中心数控伺服电机的速度反馈线断或是其检测反馈线路接触不良引起的。
5、保护开关启动报警,保护开关是保护机床的一种装置,比如大电压会烧毁一些元件等一些机床无法控制的应急措施,当遇到这些情况的时候保护开关就会启动,避免不必要的元件损坏,类似于安全停止之类的。
6、过载报警,造成过载报警的原因有加工中心数控。
机械负载不正常,或是速度控制单元上电动机电流的上限值设定得太低。
永磁电动机上的磁体脱落也会引起过载报警,如果加工中心数控不带制动器的电动机空载时用手转不动或转动轴时很费劲,即说明磁全脱落。
7、加工中心数控速度控制单元上的保险丝烧断或断路器跳闸。
加工中心常见报警及解决方法

旺磐加工中心的常见报警解决方法序号报警内容V—> PlC报警问题1.1 LUB LOW1.11检查润滑油泵的油位含义(油量过少)解决方法1.12检查油位传感器是否正常1.13检查油位报警线路电源及输入电路是否正常(号码管为DC24V及LUB LOW)1.2 COOLANT OVERLOAD (切削液马达过载)1.21 检查动力线是否有缺,1.22 检查电源电压是否为额定电压1.23 过载保护器的过载系数是否设定过小,正常为2.51.24 马达是否为反转或者有烧毁1.25 将上序问题排除后,将过载保护器上的复位按钮按下,再确定信号线是否有电源输入(号码管为COOLANT OVERLOAD)24V1.3 AXlS NOT HOME (3 轴未归零)1.31 在原点复归模式下分别将三轴归零,归完成报警信号即完成零1.32 ATC NOT READY 刀库未准备好1.33 刀库记数信号未到位,检查COUNTER 信号1.34 刀杯原位信号错误,检查TooL CUP UP 信号1.35 刀臂持刀点位置不正确,检查121点信号1.4 THE CLAMP SlGNAL ERROR (夹刀信号错误)1.41 检查夹刀到位信号线是否有异常1.42 检查打刀缸夹刀开关是否正常1.43 检查I/F诊断中X4的信号是否为11.5 AIR PRESSURE LOW (空气压力低)1.51 检查空气压力是否5MP以上1.52 检查空气压力输入信号的线路是否有DC24VV电压1.6 ATC COUNTER SINGAL ERROR (刀库记数信号错误)1.61 检查是否为记数信号接再刀库的144点上。
1.62 检查DC24电源144点与OV点之间电压是否为24V,I/F诊断中的X1E点信号是否正常!1.7 THE SP-MOTOR OVERLOAD (主轴马达过载)1.71主轴马达过载,检查回升电阻AL1与AL2间是否为通路1.72 检查PLC输入信号是否有24V1.8 PLC计时器不能工作参数被锁住1.81将6449BITo位参数设定为01.9 PLC计数器不能工作参数被锁住1.91将6449BIT1 位参数设定为01.10 PLC报警无法显示为用户定义形式参数锁住1.101将6550BIT0位和BIT2位设定为11.11主轴无法转动(无信号显示)1.111 如果是使用面板启动主轴正转时,则检查是否是在手轮方式,然后检查打刀缸上面的紧刀信号是否到位(即I/F诊断中的点X4是否为1),如果此两点信号全部到位,主轴还是无法转动,则检查报警界面是否有伺服报警。
加工中心报警列表
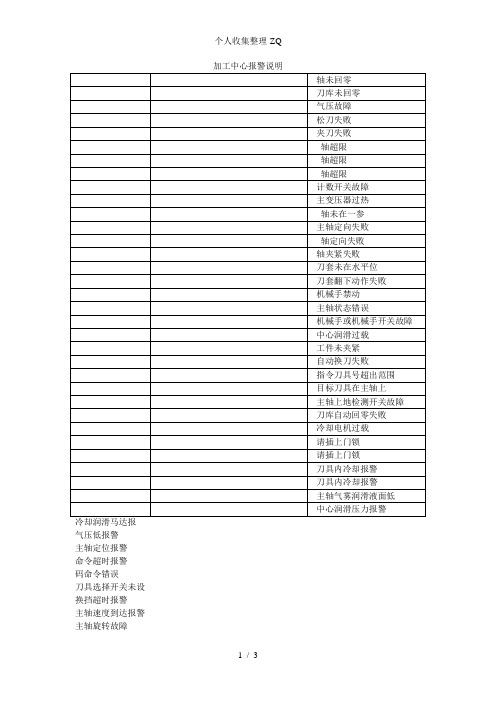
加工中心报警说明
冷却润滑马达报
气压低报警
主轴定位报警
命令超时报警
码命令错误
刀具选择开关未设
换挡超时报警
主轴速度到达报警
主轴旋转故障
换刀马达刹车释放维护状态
外部速度保持
主轴冷却油泵报警冷却液水位低报警冷却马达过载
刀具搜索违法报警命令报警
刀库移动错误报警第四轴压力低报警夹具夹紧放松报警门被打开
操作门被打开
润滑油压低报警油温冷却器报警冷却过滤器转换保冷却液压力低报警刀具寿命结束报警主轴夹紧报警
刀库等待刀具报警换刀臂位置检查保必须指定一个刀号门开关报警
超时报警
旋转超时报警
第四轴夹紧放松保刀库同步故障
互锁报警
刀库门开报警
刀库刀杯出来保警维护状态
安装站门开
热补偿错误
挡位丢失
刀具破损
刀具磨损检测
工作台放松中
排销机报警
必须返回原点
夹具放松循环启动必须循环一次
主轴刀号为
手动模式
进给选择开关为自动电源关准备中机床锁定中
辅助机能
设定按
手动轴移动互锁切销模式主轴停复位命令报警。
加工中心常见报警及解决方法
旺磐加工中心的常见报警解决方法序号报警内容含义解决方法<一> plc报警问题1.1 LUB LOW (油量过少)1.11 检查润滑油泵的油位1.12 检查油位传感器是否正常1.13检查油位报警线路电源及输入电路是否正常(号码管为DC24V及LUB LOW)1.2 COOLANT OVERLOAD (切削液马达过载)1.21 检查动力线是否有缺 ,1.22 检查电源电压是否为额定电压1.23 过载保护器的过载系数是否设定过小,正常为2.51.24 马达是否为反转或者有烧毁1.25 将上序问题排除后,将过载保护器上的复位按钮按下,再确定信号线是否有24V 电源输入(号码管为COOLANT OVERLOAD)1.3 AXIS NOT HOME (3轴未归零)1.31 在原点复归模式下分别将三轴归零,归完成报警信号即完成零1.32 ATC NOT READY 刀库未准备好1.33 刀库记数信号未到位,检查COUNTER信号1.34 刀杯原位信号错误,检查TOOL CUP UP 信号1.35 刀臂持刀点位置不正确,检查121点信号1.4 THE CLAMP SIGNAL ERROR (夹刀信号错误)1.41 检查夹刀到位信号线是否有异常1.42 检查打刀缸夹刀开关是否正常1.43 检查I/F诊断中X4的信号是否为11.5 AIR PRESSURE LOW (空气压力低)1.51 检查空气压力是否5MP以上1.52 检查空气压力输入信号的线路是否有DC24VV电压1.6 ATC COUNTER SINGAL ERROR (刀库记数信号错误)1.61 检查是否为记数信号接再刀库的144点上。
1.62 检查DC24电源144点与0V点之间电压是否为24V,1.63确定I/F诊断中的X1E点信号是否正常!1.7 THE SP-MOTOR OVERLOAD (主轴马达过载)1.71 主轴马达过载,检查回升电阻AL1与AL2间是否为通路1.72 检查PLC输入信号是否有24V1.8 PLC计时器不能工作参数被锁住1.81将6449BIT0位参数设定为01.9 PLC计数器不能工作参数被锁住1.91将6449BIT1位参数设定为01.10 PLC报警无法显示为用户定义形式参数锁住1.101将6550BIT0位和BIT2位设定为11.11 主轴无法转动(无信号显示)1.111 如果是使用面板启动主轴正转时,则检查是否是在手轮方式,然后检查打刀缸上面的紧刀信号是否到位(即I/F诊断中的点X4是否为1),如果此两点信号全部到位,主轴还是无法转动,则检查报警界面是否有伺服报警。
加工中心报警信息表

ATC CYCLE TIME OVER PER0158 PER0160
EX0160 ATC NOT IN HOME POSITION
EX0161 ATC ARM NOT IN HOME ATC-command or T-command has been given when ATC is not in PER0161 POSITION home position. EX0165 TOOL CLAMP SIGNAL OFF EX0166 EX0167 PER0165 Tool clamp check signal has been turned off while spindle is rotating. M03. M04 M319. M436. M437 or rigid-tap command has been given while tool is unclamped. ATC-command or T-command has been given while tool is unclamped.
PER0035 切断还没有完成。 MER0068 门互锁取消状态已经失效。 MER0069 在定时器中所设定的经过时间之后,就已经接通了门锁紧完成信 号。
EX0097 面板 I/O 报警 EX0099 面板报警 EX0103
MER0097 在平板式操作面板中已经发生了 I/O 报警。 MER0099 在平板式操作面板中已经发生了报警。 ATC-command has been given while interlock bypass is on. 空
error. EX0230 PLEASE SELECT MAGAZINE AUTO MODE The manual operation mode has been selected on the magazine PER0230 operation panel when T-code command has been given. Selected the automatic operation mode. PER0231 The magazine door has been opened. Close the magazine door. PER0233 Press the cycle start button. T-cycle is started. PER0240 Tool data is set for the empty pot during ATC cycle. Tool data is not properly set.
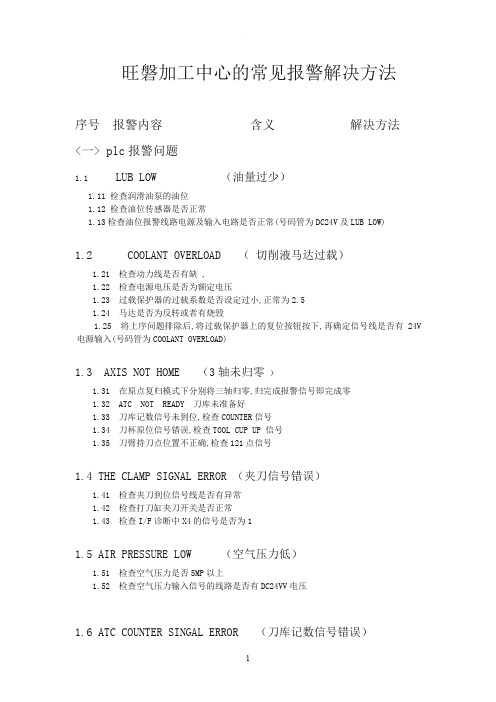
加工中心常见报警和解决方法

加⼯中⼼常见报警和解决⽅法旺磐加⼯中⼼的常见报警解决⽅法序号报警内容含义解决⽅法<⼀> plc报警问题1.1 LUB LOW (油量过少)1.11 检查润滑油泵的油位1.12 检查油位传感器是否正常1.13检查油位报警线路电源及输⼊电路是否正常(号码管为DC24V及LUB LOW)1.2 COOLANT OVERLOAD (切削液马达过载)1.21 检查动⼒线是否有缺 ,1.22 检查电源电压是否为额定电压1.23 过载保护器的过载系数是否设定过⼩,正常为2.51.24 马达是否为反转或者有烧毁1.25 将上序问题排除后,将过载保护器上的复位按钮按下,再确定信号线是否有24V 电源输⼊(号码管为COOLANT OVERLOAD)1.3 AXIS NOT HOME (3轴未归零)1.31 在原点复归模式下分别将三轴归零,归完成报警信号即完成零1.32 ATC NOT READY ⼑库未准备好1.33 ⼑库记数信号未到位,检查COUNTER信号1.34 ⼑杯原位信号错误,检查TOOL CUP UP 信号1.35 ⼑臂持⼑点位置不正确,检查121点信号1.4 THE CLAMP SIGNAL ERROR (夹⼑信号错误)1.41 检查夹⼑到位信号线是否有异常1.42 检查打⼑缸夹⼑开关是否正常1.43 检查I/F诊断中X4的信号是否为11.5 AIR PRESSURE LOW (空⽓压⼒低)1.51 检查空⽓压⼒是否5MP以上1.52 检查空⽓压⼒输⼊信号的线路是否有DC24VV电压1.6 ATC COUNTER SINGAL ERROR (⼑库记数信号错误)1.61 检查是否为记数信号接再⼑库的144点上。
1.62 检查DC24电源144点与0V点之间电压是否为24V,1.63确定I/F诊断中的X1E点信号是否正常!1.7 THE SP-MOTOR OVERLOAD (主轴马达过载)1.71 主轴马达过载,检查回升电阻AL1与AL2间是否为通路1.72 检查PLC输⼊信号是否有24V1.8 PLC计时器不能⼯作参数被锁住1.81将6449BIT0位参数设定为01.9 PLC计数器不能⼯作参数被锁住1.91将6449BIT1位参数设定为01.10 PLC报警⽆法显⽰为⽤户定义形式参数锁住1.101将6550BIT0位和BIT2位设定为11.11 主轴⽆法转动(⽆信号显⽰)1.111 如果是使⽤⾯板启动主轴正转时,则检查是否是在⼿轮⽅式,然后检查打⼑缸上⾯的紧⼑信号是否到位(即I/F诊断中的点X4是否为1),如果此两点信号全部到位,主轴还是⽆法转动,则检查报警界⾯是否有伺服报警。
津上NU加工中心VA报警一览表

内容:在正面门打开的情况下,按了循环启动键。
处理:请把正面门关上再按循环启动按钮PS:或者K参数K4.6 0改1 开着门也可以按启动按钮内容:在左侧门打开的情况下,按了循环启动键。
处理:请把左侧门关上再按循环启动按钮PS:或者K参数K4.7 0改1 开着门也可以按启动按钮内容:气压不足,空压低下处理: 调节气压阀,增加气泵PS:维修时,K参数K4.4 0改1 可屏蔽此报警,但不能执行换刀指令内容:水箱切削液液位过低处理: 1. 添加切削液,加到水箱水位2/3以上2. 如果还是报警,请调节水箱上面的液位感应灯3. K参数K4.5 0改1 可屏蔽此报警内容:油路压力不足处理: 1. 检查用油是否太快,油管接头是否漏油检查导轨油加油时间的频率是是否正常(比如:一周添加一次)2. 在没有漏油,加油频率正常的情况下K参数K13.2 0改1 可屏蔽此报警内容:导轨油油箱液位不足处理: 请添加导轨油PS:机床维修时K参数K4.3 0改1 可屏蔽此报警注意:正常加工时严禁屏蔽此参数,长时间屏蔽后会造成丝杆,轴承,线轨磨损加快很多。
PS:一般不会出现这个报警。
PS:出现这个报警,一般是水泵的热敏开关损坏,可对调开关做测试PS:机床电柜右下角有两个电池盒,一个是脉冲编码器电池,一个是NC装置电池更换电池请把机床各轴回原点后再进行更换,防止机械原点丢失。
PS:出现M编码循环超时报警,它的意思是执行了这个指令,机床没有动作1.G01 倍率开关在0的位置的时候,有些时候会出现这个报警。
2.一个程序段不能出现3个以上的M指令内容:刀库位置异常W轴机械坐标位置不对0°18°36°54°72°90°108°126°144°162°198°216°234°252°180°270°288°306°324°342°PS:刀库轴W轴位置只会在这20个位置上才算是正常的处理:手动旋转刀库,手动正转几下,手动反转几下,或者按刀库回零都可以PS:如果刀库旋转按了没有反应,可以先把急停拍了,再按准备按钮,再旋转刀库试试PS : w轴坐标与以上坐标相差2°以上的时候,如果手动旋转刀库没反应,可以修改K参数K40.1 0改1 按手轮*100,再按四轴,再看W轴机械坐标,手轮摇到上记20个坐标都可以消除2022报警。
兄弟加工中心报警【大全】
* servo(***)
*司服问题(***)
发生在第5轴,原因视乎(***)
0064(conv)
5064(nc)
* servo(***)
*司服问题(***)
发生在第5轴,原因视乎(***)
0066(conv)
5066(nc)
* servo(***)
*司服问题(***)
发生在M轴,原因视乎(***)
警报号码
讯识
原因
解决方法
0000(conv)
5000(nc)
Watch dog(main)
检测到问题(主板)
主板出现错误
通知有关人仕
0001(conv)
5001(nc)
Watch dog(slave)
检测到问题(副板)
副板出现错误
通知有关人仕
0002(conv)
5002(nc)
Watch dog(local)
0055(conv)
5055(nc)
Ram error(main-loc3)
缓存器问题
电子板问题
0056(conv)
5056(nc)
Servo relay1 error
司服relay1问题
1/司服电源供应relay1激活
2/司服电源供应relay1只关了一半
0057(conv)
5057(nc)
Servo relay2 error
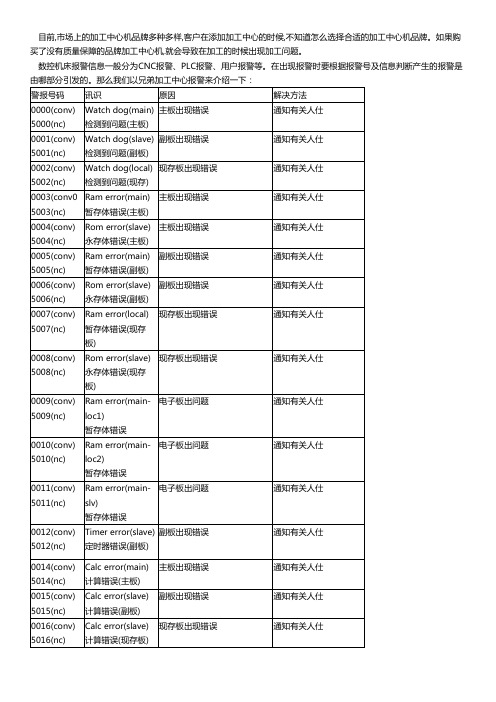
目前,市场上的加工中心机品牌多种多样,客户在添加加工中心的时候,不知道怎么选择合适的加工中心机品牌。如果购买了没有质量保障的品牌加工中心机,就会导致在加工的时候出现加工问题。
数控机床报警信息一般分为CNC报警、PLC报警、用户报警等。在出现报警时要根据报警号及信息判断产生的报警是由哪部分引发的。那么我们以兄弟加工中心报警来介绍一下:
加工中心常见报警及解决方法

旺磐加工中心的常见报警解决方法序号报警内容含义解决方法<一> plc报警问题1.1 LUB LOW (油量过少)1.11 检查润滑油泵的油位1.12 检查油位传感器是否正常1.13检查油位报警线路电源及输入电路是否正常(号码管为DC24V及LUB LOW)1.2COOLANT OVERLOAD (切削液马达过载)1.21 检查动力线是否有缺,1.22 检查电源电压是否为额定电压1.23 过载保护器的过载系数是否设定过小,正常为2.51.24 马达是否为反转或者有烧毁1.25 将上序问题排除后,将过载保护器上的复位按钮按下,再确定信号线是否有24V 电源输入(号码管为COOLANT OVERLOAD)1.3 AXIS NOT HOME (3轴未归零)1.31 在原点复归模式下分别将三轴归零,归完成报警信号即完成零1.32 ATC NOT READY 刀库未准备好1.33 刀库记数信号未到位,检查COUNTER信号1.34 刀杯原位信号错误,检查TOOL CUP UP 信号1.35 刀臂持刀点位置不正确,检查121点信号1.4 THE CLAMP SIGNAL ERROR (夹刀信号错误)1.41 检查夹刀到位信号线是否有异常1.42 检查打刀缸夹刀开关是否正常1.43 检查I/F诊断中X4的信号是否为11.5 AIR PRESSURE LOW (空气压力低)1.51 检查空气压力是否5MP以上1.52 检查空气压力输入信号的线路是否有DC24VV电压1.6 ATC COUNTER SINGAL ERROR (刀库记数信号错误)1.61 检查是否为记数信号接再刀库的144点上。
1.62 检查DC24电源144点与0V点之间电压是否为24V,1.63确定I/F诊断中的X1E点信号是否正常!1.7 THE SP-MOTOR OVERLOAD (主轴马达过载)1.71 主轴马达过载,检查回升电阻AL1与AL2间是否为通路1.72 检查PLC输入信号是否有24V1.8 PLC计时器不能工作参数被锁住1.81将6449BIT0位参数设定为01.9 PLC计数器不能工作参数被锁住1.91将6449BIT1位参数设定为01.10 PLC报警无法显示为用户定义形式参数锁住1.101将6550BIT0位和BIT2位设定为11.11 主轴无法转动(无信号显示)1.111 如果是使用面板启动主轴正转时,则检查是否是在手轮方式,然后检查打刀缸上面的紧刀信号是否到位(即I/F诊断中的点X4是否为1),如果此两点信号全部到位,主轴还是无法转动,则检查报警界面是否有伺服报警。
海天加工中心报警吗

海天报警吗1000:气压低1001:主轴换挡异常1002:主轴报警1003:刀库报警1004:松刀。
锁刀开关异常报警1005:恒温油箱报警1006:自动换刀异常1007:机械手异常报警1008:换刀位刀套开关异常1009:换挡错误1010:刀库操作错误1011:刀库电机不能旋转1012:换刀臂电机不能旋转1013:刀库的停止位置不对1014:换刀点错误1015:换刀臂位置错误1024:刀夹开关异常1025第4轴松刀检测开关异常1026:第4轴互锁1027:机床过载1031:ZF油箱缺油报警1028:A代码指令错误1029:A轴运行错误1030:A轴检测开关全部为[ON]1033:4TH轴开关异常2000:门联锁2001:润滑报警2002:刀具没有找到2003:操作方式错误2004:没有回零2007:主轴中心冷却异常2009:无效的M代码2010:不能指令T代码2011:不能指令B代码2013:操作错误12014:操作错误22015:板式滤油器异常2017冷却异常复位解除2019平衡压力报警2020:水枪泵水箱夜位低2021:润滑压力报警2022:A轴需要返回参考点2023:冷却箱夜位低2024:ZF油箱缺油2025:ZF箱油液位低2026:液压站压力低2027:液压站液位低2028:X轴齿轮润滑需要加油2106:单步换刀2107:断电前,主轴是刀具松刀状态2018:刀库回零完成2100:下一步:输入M262101:下一步:输入M102102:下一步:输入M272103:下一步:输入M112104:下一步:输入M252105: 下一步:输入M21。
加工中心报警列表

加工中心报警说明之阿布丰王创作
2020冷却润滑ATC马达报2021气压低报警2022主轴定位报警2023M6命令超时报警2024T码命令错误2025刀具选择开关未设2026换挡超时报警2027主轴速度到达报警2028主轴旋转故障2029APC门被打开2030换刀马达刹车释放2031ATC维护状态2032外部速度坚持2033主轴冷却油泵报警2034冷却液水位低报警2035TSC冷却马达过载2036刀具搜索违法报警2037M06命令报警
2039刀库移动错误报警2043第四轴压力低报警2045夹具夹紧放松报警2047ATC门被打开2048操纵门被打开2050润滑油压低报警2051油温冷却器报警2052冷却过滤器转换保2053冷却液压力低报警2054刀具寿命结束报警2060主轴夹紧报警2064刀库等待刀具报警2065换刀臂位置检查保2066必须指定一个刀号
2068ATC门开关报警2074ATC超时报警2075ATC旋转超时报警2077第四轴夹紧放松保2079刀库同步故障2080ATC互锁报警2081ATC刀库门开报警2082刀库刀杯出来保警2083ATC维护状态2084APC装置站门开2085热抵偿错误2087挡位丢失2088刀具破损2089刀具磨损检测2090工作台放松中2098排销机报警2101必须返回原点2102夹具放松循环启动2103ATC必须循环一次2104主轴刀号为02105ATC手动模式2106APC手动模式2107进给选择开关为02108自动电源关准备中2109机床锁定中2110辅助机能2111APC设定按
2112手动轴移动互锁2113切销模式主轴停2114复位命令报警。
加工中心全部的报警说明.

2007/2/12 Page:1/5MITSUBISHI 刀臂式机器警报讯息2007/2/12 Page:2/52007/2/12 Page:3/52007/2/12 Page:4/52007/2/12 Page:5/5FANUC LH 警報訊息說明2008/01/17臥式ATC原點校正臥式ATC PMM GEAR PARAMETER設定PMM參數P105=0,P179=36000,P141=36000P106=?EXAMPLE:刀庫總刀數P68=40,60刀庫齒輪轉一圈刀庫位移十(九)把刀,BT50每位移一把刀,馬達所需轉速,速比1:120(1:108)位移一把120/10=12(108/9=12), P106=(刀庫總刀數40 )X 12(位移一把=12)=480 (刀庫總刀數60 )X 12=720BT40每位移一把刀,馬達所需轉速,速比1:90位移一把90/9=10, P106=(刀庫總刀數60 )X 10(位移一把=10)=600若P106值太大則P179=360000,P141=360000(PMM417Alarm), 刀庫總刀數P68=60,P31=-111P11#0=1 APC,P12#1=0 Automatic parameter setting,P125=Motor type 272P40=100x10,P41=80x10,P43=200x10(刀庫總刀數=60 )P1#4=1,P40=700,P41=500,P43=2000,P68=60,P106=720,P141=360000,P179=360000(刀庫總刀數=40 )P1#4=1,P40=80,P41=50,P43=200,P68=40,P106=480,P141=36000,P179=360001.開機1077 MAG MOTOR ALARM1078 MAG BATTERY ALARMPMM->MSG 000 319 3502.K13.0=1用手輪移動一個以上刀套(P9989#1=1 PMM,MPG FUN.)MAG-KEY 在Manual位置關機再開目前用此方式K13.2=1 JOG Mode,X5.2=1(MAG Key=manual),用X5.3(MAG CW)X5.4(MAG CCW)移動一個以上刀套MAG-KEY 在Manual位置關機再開用JOG移動校正OK(JOG速度P41=5~10)PMM PARAMETER->11#0設1關機再開K13.2=0正常MAG JOG One pitch移動每位移一把刀,馬達所需轉速,BT40速比1:100位移一把100/10=10(刀庫總刀數60 )X 10=600->P106值=100P105值=0, P179值=3600003.ALARM 1078消失用手輪移動校正OKPMM PARAMETER->11#0設1關機再開4.ALARM 1077消失K13.0=05.PMM 950 alarmDC24V由ON/OFF RELAY 控制AC220V由K1A 控制1. A.Function=2 Data=1 Y72=33 Mode=Auto Y70=001 Start=ST(T-code)B.Function=2 Data=4 Y72=36 Mode=Jog Y70=101 Start=+x,-x(Jog one pitch)K2.1=0押Mag.CW-key Run, 放開Mag.CW-key Mag. Stop in-correct POS.(連續運轉)K2.1=1押Mag.CW-key Run, 放開Mag.CW-key Mag. Stop in-nocorrect POS.(one pitch step by step)C.Function=4 Data=1 Y72=65 Mode=Jog Y70=101 Start= STK13.2=1,K15.4=1 Jog Mag.key-in Manual,押主軸停止鍵1sec後放開Mag. Return to 1 POS. D2=1D.Function=4 Data=15 Y72=79 Mode=Jog Y70=101 Start= STK13.2=1,K15.5=1 Jog Mag.key-in Manual,押主軸停止鍵1sec後放開Mag. PMM 000 alarmP11#0=1setting HOME OKE.Function=0 Data=0xxxx Y72=0 Mode=Jog Y70=101 Start=+x,-xK13.2=1押Mag.CW-key Run, 押W-key Stop錯誤修正K13.2=1押Mag.CW-key Run, 放開Mag.CW-key Mag. Stop(注意D2不會更動)+X K13.2=1押W-key Run, 放開W-key Mag. Stop(注意D2不會更動)-X用PMM#41=5 JOG移動刀庫取代MPGD0=Spindle NO., D1=Wait tool NO. D2=Mag. current NO. D3=T-command code NO臥式APC手動找尋O9000程式號碼,且自動跳至自動執行G7.2(ST)=1P6300#4(ESR)=1P3202#6(PSR)=1D100=90D101=00P6071=6(M6 ARM換刀)O9001P6072=100(M100 APC自動更換)O9002P6073=101(M101 APC PA-IN更換)O9003P6074=102(M102 APC PB-IN更換)O9004 O9000(APC-MAN.)(D100=90,D101=00)#3003=1G4IF[1013EQ1]GOTO99(MLK)M98P9002N99#3003=0M30O9001(M6-ATC)(P6071=6)#3003=1G4IF[#1008EQ1]GOTO99 (TF=SP)IF[#1013EQ1]GOTO99 (MLK)#130=#4003#131=#4006G91G30Z0G30X0Y0M6M88(DOOR CLOSE)G#130G#131M05(M05取消M03記憶)N99#3003=0M99O9002(M100-APC)(P6072=100)#3001=1G4IF[#1013EQ1]GOTO99 (MLK)M71(APC CHECK)#130=#4003#131=#4006G91G30Z0IF[#1011EQ1]GOTO2(ZP4 OK)IF[#1012NE1]GOTO1(1=0.001 Degree)M41G91G28B0M40GOTO2N1G91G28B0N2M40M72(PALLET UNCLAMP)G4X2.M74(PALLET UP)G4X1.IF[#1009EQ1]GOTO3(PA NOW IN)M76(PA->IN)G4X1.GOTO4N3M77(PB->IN)G4X1.N4M75(PALLET DOWN)G4X1.M73(PALLET CLAMP)G#130G#131N99#3003=0M99O9003(M101-PA-in)(P6073=101)#3003=1G4IF[#1013EQ1]GOTO99IF[#1009EQ1]GOTO99M98P9002N99#3003=0M99O9004(M102-PB-in)(P6074=102)#3003=1G4IF[#1013EQ1]GOTO99IF[#1010EQ1]GOTO99M98P9002N99#3003=0M99EXE M100若停在M74(APC-UP)因APC-UP(X11.2)APC-DOWN(X11.3)同時為1把K11.0=1(解除APC-SOL自保)K14.0=1(解除APC-NOT READY)K14.7=1(解除APC-OK ENABLE)關電再開使APC回位OK後K11.0=0,K14.0=0,K14.7=0X12.1=0 M72 APC UNCLAMPX12.1=1 M73 APC CLAMPX12.1(接1.2 NO)X12.1=0 M72 APC UNCLAMP Y7.6=1 AIR CLEANX11.7(接1.3 NO)氣密檢知K14.1=1X12.1=0 M72 APC UNCLAMP Y7.6=1 AIR CLEAN ON X11.7=1(有風)X12.1=1 M73 APC CLAMP Y7.6=0 AIR CLEAN OFF X11.7=0(無風)若X11.7沒有0->1->0則AL1048 AIR TIGHT ALARMK14.0=1(解除APC-NOT READY)不可設1否則AL1048 AIR TIGHT ALARM不會出現X11.7有風無1則AL1048 AIR TIGHT ALARM Y7.6=1 AIR CLEAN ONK14.2=1解除AL1048 AIR TIGHTDATA BCD,BIN選擇由PMCRPM設定D0~D1024 Bit可作斷電自保COUNTER BCD,BIN選擇由Ladder3設定臥式位置開關保護K15.2=1取消位置開關保護3-AXIS 皆入設定範圍則保護+X.-X,-Y,-Z G132.0,G134.0,G134.1,G134.2=1不保護+Y,+Z G132.1,G132.2=0P6930,P6950=X(0,-700000)P6931,P6951=Y(-500000,-650000)P6932,P6952=Z(-400000,-650000)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FANUC 警报讯息说明
FANUC 0i-TC车床警报讯息说明
FANUC 0i-TC车床警报讯息说明
2007/2/12 Page:4/5
FANUC 0i-TC车床警报讯息说明
2007/2/12 Page:5/5
FANUC LH 警报讯息说明2008/01/17
卧式ATC原点校正
卧式ATC PMM GEAR PARAMETER设定PMM参数
P105=0,P179=36000,P141=36000
P106=?
EXAMPLE:刀库总刀数P68=40,60刀库齿轮转一圈刀库位移十(九)把刀,
BT50每位移一把刀,马达所需转速,速比1:120(1:108)
位移一把120/10=12(108/9=12), P106=(刀库总刀数40 )X 12(位移一把=12)=480 (刀库总刀数60 )X 12=720
BT40每位移一把刀,马达所需转速,速比1:90
位移一把90/9=10, P106=(刀库总刀数60 )X 10(位移一把=10)=600
若P106值太大则P179=360000,P141=360000(PMM417Alarm), 刀库总刀数P68=60,P31=-111
P11#0=1 APC,P12#1=0 Automatic parameter setting,P125=Motor type 272
P40=100x10,P41=80x10,P43=200x10
(刀库总刀数=60 )P1#4=1,P40=700,P41=500,P43=2000,P68=60,P106=720,P141=360000,P179=360000
(刀库总刀数=40 )P1#4=1,P40=80,P41=50,P43=200,P68=40,P106=480,P141=36000,P179=36000
1.开机1077 MAG MOTOR ALARM
1078 MAG BATTERY ALARM
PMM->MSG 000 319 350
用手轮移动一个以上刀套(P9989#1=1 PMM,MPG FUN.)
MAG-KEY 在Manual位置
目前用此方式
=1 JOG Mode,=1(MAG Key=manual),用(MAG CW)(MAG CCW)移动一个以上刀套MAG-KEY 在Manual位置
关机再开
用JOG移动校正OK(JOG速度P41=5~10)
PMM PARAMETER->11#0设1
关机再开
=0正常MAG JOG One pitch移动
每位移一把刀,马达所需转速,BT40速比1:100
位移一把100/10=10(刀库总刀数60 )X 10=600->P106值=100
P105值=0, P179值=360000
1078消失
用手轮移动校正OK
PMM PARAMETER->11#0设1
关机再开
1077消失=0
950 alarm
DC24V由ON/OFF RELAY 控制
AC220V由K1A 控制
1.=2 Data=1 Y72=33 Mode=Auto Y70=001 Start=ST(T-code)
=2 Data=4 Y72=36 Mode=Jog Y70=101 Start=+x,-x(Jog one pitch)
=0押Run, 放开Mag. Stop in-correct POS.(连续运转)
=1押Run, 放开Mag. Stop in-nocorrect POS.(one pitch step by step)
=4 Data=1 Y72=65 Mode=Jog Y70=101 Start= ST
=1,=1 Jog Manual,押主轴停止键1sec後放开Mag. Return to 1 POS. D2=1
=4 Data=15 Y72=79 Mode=Jog Y70=101 Start= ST
=1,=1 Jog Manual,押主轴停止键1sec後放开Mag. PMM 000 alarm P11#0=1 setting HOME OK
=0 Data=0xxxx Y72=0 Mode=Jog Y70=101 Start=+x,-x
=1押Run, 押Stop错误
修正=1押Run, 放开Mag. Stop(注意D2不会更动)+X
=1押Run, 放开Mag. Stop(注意D2不会更动)-X
用PMM#41=5 JOG移动刀库取代MPG
D0=Spindle NO., D1=Wait tool NO. D2=Mag. current NO. D3=T-command code NO
卧式APC
手动找寻O9000程式号码,且自动跳至自动执行(ST)=1
P6300#4(ESR)=1
P3202#6(PSR)=1
P6071=6(M6 ARM换刀)O9001
P6072=100(M100 APC自动更换)O9002 P6073=101(M101 APC PA-IN更换)O9003 P6074=102(M102 APC PB-IN更换)O9004 O9000(APC-MAN.)(D100=90,D101=00)
#3003=1
G4
IF[1013EQ1]GOTO99(MLK)
M98P9002
N99#3003=0
M30
O9001(M6-ATC)(P6071=6)
#3003=1
G4
IF[#1008EQ1]GOTO99 (TF=SP)
IF[#1013EQ1]GOTO99 (MLK)
#130=#4003
#131=#4006
G91G30Z0
G30X0Y0
M6
M88(DOOR CLOSE)
G#130
G#131
M05(M05取消M03记忆)
N99#3003=0
M99
O9002(M100-APC)(P6072=100)
#3001=1
G4
IF[#1013EQ1]GOTO99 (MLK)
M71(APC CHECK)
#130=#4003
#131=#4006
G91G30Z0
IF[#1011EQ1]GOTO2(ZP4 OK)
IF[#1012NE1]GOTO1(1= Degree)
M41
M40
GOTO2
N1G91G28B0
N2M40
M72(PALLET UNCLAMP)
G4X2.
M74(PALLET UP)
G4X1.
IF[#1009EQ1]GOTO3(PA NOW IN) M76(PA->IN)
G4X1.
GOTO4
N3M77(PB->IN)
G4X1.
N4M75(PALLET DOWN)
G4X1.
M73(PALLET CLAMP)
G#130
G#131
N99#3003=0
M99
O9003(M101-PA-in)(P6073=101)
#3003=1
G4
IF[#1013EQ1]GOTO99
IF[#1009EQ1]GOTO99
M98P9002
N99#3003=0
M99
O9004(M102-PB-in)(P6074=102)
#3003=1
G4
IF[#1013EQ1]GOTO99
IF[#1010EQ1]GOTO99
M98P9002
N99#3003=0
M99
EXE M100若停在M74(APC-UP) 因APC-UPAPC-DOWN同时为1 把=1(解除APC-SOL自保)
=1(解除APC-NOT READY)
=1(解除APC-OK ENABLE)
关电再开使APC回位OK後=0,=0,=0
=0 M72 APC UNCLAMP
=1 M73 APC CLAMP
(接NO)
=0 M72 APC UNCLAMP =1 AIR CLEAN
(接NO)气密检知=1
=0 M72 APC UNCLAMP =1 AIR CLEAN ON =1(有风)
=1 M73 APC CLAMP =0 AIR CLEAN OFF =0(无风)
若没有0->1->0则AL1048 AIR TIGHT ALARM
=1(解除APC-NOT READY)不可设1否则AL1048 AIR TIGHT ALARM不会出现有风无1则AL1048 AIR TIGHT ALARM =1 AIR CLEAN ON
=1解除AL1048 AIR TIGHT
DATA BCD,BIN选择由PMCRPM设定D0~D1024 Bit可作断电自保COUNTER BCD,BIN选择由Ladder3设定
卧式位置开关保护
=1取消位置开关保护
3-AXIS 皆入设定范围则保护+,-Y,-Z ,,,=1
不保护+Y,+Z ,=0
P6930,P6950=X(0,-700000)
P6931,P6951=Y(-500000,-650000)
P6932,P6952=Z(-400000,-650000)。