XY平台快速安装与使用_071219
XY运动平台实验指导书_V2.2

3.4
实验步骤.................................................................................................................13
3.5
实验要求及总结.....................................................................................................14
4.2
实验原理.................................................................................................................15
4.2.1 数字式 PID 控制器 ........................................................................................15
3.2.1 直流伺服电机概述.........................................................................................10
3.2.2 直流伺服电机模型.........................................................................................10
本实验指导书以运动控制技术为主要实验内容,以 XY 运动平台为实验对象。适用于机 械制造及自动化、机电工程、运动控制技术、数控技术等相关专业的实验教学。
软件安装与调试操作手册

软件安装与调试操作手册第1章软件概述与准备工作 (3)1.1 软件简介 (3)1.2 系统要求 (3)1.3 安装前的准备工作 (4)第2章软件安装流程 (4)2.1 安装步骤 (4)2.1.1 软件 (4)2.1.2 解压安装包 (4)2.1.3 启动安装程序 (4)2.1.4 阅读并同意许可协议 (4)2.1.5 选择安装路径 (4)2.1.6 配置安装选项(见2.2节) (4)2.1.7 开始安装 (4)2.1.8 完成安装 (5)2.2 安装选项说明 (5)2.2.1 典型安装 (5)2.2.2 定制安装 (5)2.2.3 卸载旧版本 (5)2.2.4 创建桌面快捷方式 (5)2.2.5 添加到PATH环境变量 (5)2.3 首次运行配置 (5)2.3.1 启动软件 (5)2.3.2 语言选择 (5)2.3.3 登录账户 (5)2.3.4 配置软件选项 (5)2.3.5 完成配置 (5)第3章环境变量设置 (6)3.1 环境变量概述 (6)3.2 设置环境变量 (6)3.2.1 操作系统环境变量 (6)3.2.2 软件依赖环境变量 (6)3.3 常见问题解决 (7)3.3.1 环境变量不生效 (7)3.3.2 路径问题 (7)3.3.3 权限问题 (7)3.3.4 软件依赖环境变量缺失 (7)第4章软件功能模块介绍 (7)4.1 模块概述 (7)4.1.1 模块划分原则 (7)4.1.2 模块功能简述 (7)4.2 模块功能详细介绍 (8)4.2.2 数据处理模块 (8)4.2.3 业务逻辑模块 (8)4.2.4 系统管理模块 (8)4.2.5 接口模块 (9)4.3 模块间关联关系 (9)第5章软件基本操作 (9)5.1 界面布局与功能 (9)5.1.1 界面布局 (9)5.1.2 功能概述 (10)5.2 常用操作指南 (10)5.2.1 文件操作 (10)5.2.2 编辑操作 (10)5.2.3 视图控制 (10)5.3 快捷键说明 (11)第6章调试工具与技巧 (11)6.1 调试概述 (11)6.2 调试工具的使用 (11)6.2.1 通用调试工具 (11)6.2.2 专用调试工具 (12)6.3 常见问题定位与解决 (12)6.3.1 编译错误 (12)6.3.2 运行时错误 (12)6.3.3 功能问题 (12)6.3.4 网络问题 (12)第7章软件配置与优化 (13)7.1 软件配置文件 (13)7.1.1 配置文件概述 (13)7.1.2 配置文件类型 (13)7.1.3 配置文件位置 (13)7.2 参数设置与调整 (13)7.2.1 参数设置原则 (13)7.2.2 常用参数设置 (13)7.3 功能优化建议 (14)7.3.1 系统层面优化 (14)7.3.2 软件层面优化 (14)7.3.3 网络层面优化 (14)第8章数据备份与恢复 (14)8.1 备份概述 (14)8.2 备份操作步骤 (14)8.3 恢复操作步骤 (15)第9章软件更新与升级 (15)9.1 更新概述 (15)9.2 手动更新操作 (16)9.2.2 更新 (16)9.2.3 安装更新 (16)9.3 自动更新设置 (16)9.3.1 打开自动更新设置 (16)9.3.2 设置自动更新参数 (16)9.3.3 保存设置 (16)第10章售后服务与支持 (17)10.1 技术支持渠道 (17)10.1.1 在线客服支持 (17)10.1.2 邮件支持 (17)10.1.3 电话支持 (17)10.1.4 远程协助 (17)10.2 常见问题解答 (17)10.2.1 软件安装问题 (17)10.2.2 软件运行问题 (17)10.2.3 功能使用问题 (18)10.3 软件更新与维护策略 (18)10.3.1 软件更新 (18)10.3.2 软件维护 (18)第1章软件概述与准备工作1.1 软件简介本章主要对即将安装和调试的软件进行概述。
XY平台网络化远程控制系统
Re mo t e Co n t r o l S y s t e m o f XY Ta b l e
L I N J i a n — p i n g,GUO Xi n g — z h o n g,GE Yu a n ( A n h u i k e y L a b o r a t o r y o f D e t e c t i o n T e c h n o l o g y a n d E n e r y g S a v i n g D e v i c e s , A n h u i P o l y t e c h n i c U n i v e r s i t y ,Wu h u 2 4 1 0 0 0 ,C h i n a )
o f r e mo t e c o n t r o l t e c hn o l o g y i n t he ie f l d o f n ume r i c a l c o n t r o l s y s t e m.
Ke y wo r d s :r e mo t e c o n t r o l :XY T a b l e :C / S mo d e
第2 7卷 第 5期
V0 1 .2 7 No .5
重 庆 理 工 大 学 学 报( 自然科 学 )
J o u r n a l o f C h o n g q i n g U n i v e r s i t y o f T  ̄ c h n o l o g y ( N a t u r a l S c i e n c e )
( 安徽 工程 大学 安 徽省 检测 技术 与 节能 装置 重点 实 验室 , 安徽 芜 湖
摘
2 4 1 0 0 0 )
要: 以X Y 平 台为 受控 实验 设 备 , 采用 C / S模 式 , 利用V i s u a l C+ + 6 . 0和 Wi n s o c k A P I
xy工作台说明书
第三章 电机控制原理3.1交流伺服电机介绍交流伺服电机一般由永磁同步电机、转子位置传感器、速度传感器组成,交流伺服电机和它的驱动器组成一个伺服系统。
早期的交流伺服系统是一个典型的速度闭环系统,伺服驱动器从主控制系统接收电压变化范围为m ax U -~max U 的速度指令信号。
电压从m ax U -变化到max U 的过程中,伺服电机可实现从反转最高速变化到零,然后再变化到正转最高速。
但是,这种交流伺服系统只能实现对速度的闭环控制,还不能直接实现对位置的闭环控制。
要实现对位置的闭环控制,必须在电机和控制系统之间构成一个位置环。
为了适应数字化控制的发展趋势,国外一些厂家在九十年代初相继推出了带位置环的全数字式交流伺服系统。
不仅可以进行位置的闭环控制,还使得交流伺服电机可以象伺服电机一样易于控制,上位控制器可以是运动控制器、PLC 或者直接是PC 机等。
3.2 交流伺服电机的控制模式以日本山洋公司的Q 系列交流伺服系统为例,介绍这种交流伺服系统的控制原理。
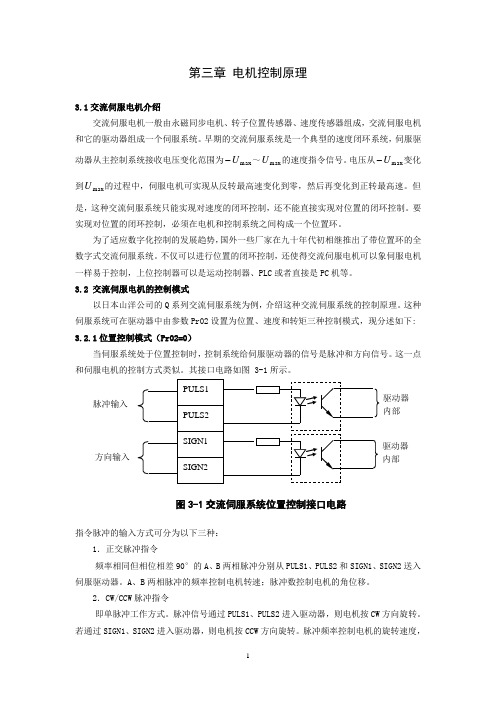
这种伺服系统可在驱动器中由参数Pr02设置为位置、速度和转矩三种控制模式,现分述如下: 3.2.1位置控制模式(Pr02=0)当伺服系统处于位置控制时,控制系统给伺服驱动器的信号是脉冲和方向信号。
这一点和伺服电机的控制方式类似。
其接口电路如图 3-1所示。
指令脉冲的输入方式可分为以下三种:1.正交脉冲指令频率相同但相位相差90°的A 、B 两相脉冲分别从PULS1、PULS2和SIGN1、SIGN2送入伺服驱动器。
A 、B 两相脉冲的频率控制电机转速;脉冲数控制电机的角位移。
2.CW/CCW 脉冲指令即单脉冲工作方式。
脉冲信号通过PULS1、PULS2进入驱动器,则电机按CW 方向旋转。
若通过SIGN1、SIGN2进入驱动器,则电机按CCW 方向旋转。
脉冲频率控制电机的旋转速度,脉冲输入 方向输入 驱动器 内部驱动器 内部图3-1交流伺服系统位置控制接口电路脉冲数控制电机的角位移。
平台部署操作手册准备一键安装包

平台部署操作手册
一、准备一键安装包
将一键安装文件解压到一个路径不含空格和特殊字符的目录下
如果要安装定制版本,请将定制平台版本复制到DMS200目录下,如果要安装通用版本跳过这一步骤
二、运行DMS200Install
三、运行配置工具
3.1选择相应的版本,和设置其他软件是否安装选项;
3.2 安装配置数据客户端
fSbC9xxy7ga57DOrLz9mMqYSFx8S OIWiOBI61uJ562GINVTVNBDaGBIl Cuni0a1iUAF88I6zrHzH9Wzcv4h+ h3wTGgOX8mYgN0jEEOmzI1DLx0DJ 8t94hUJ5O0I99Ts6iqvHhw24jYfI
h++JG/BzVLnaSDbNdqH9iYbXZ2Pc eFZAZe6hzPQ9DREtkEvg7rAul/Fw ZptCP1WFfKkfgviwY8i67NucJe2L UTZFKoX5MGSuP9GGJnouQg/P1SII 3PCKXGoUv0hBoTiMLXBlJWpaNg==
3.3 安装office
3.4 完成安装
3.5 定制版本配置文件添加配置信息
由于这是定制版本,里边添加了sqlserver数据库的连接字符串,一键安装完后需要手动的在发布包的配置文件中添加这个配置字段;如果是通用版本跳过此步骤;为什么不能将这个字段添加到发布包中,一键安装后不就可以了吗?这个问题参考“解读BS一键安装config 目录说明”
四、平台注册测试
4.1 关闭IE增强行安全设置
4.2 平台注册
4.3 安装flash插件
五、设置防火墙开放端口参考“设置防火墙例外”。
PLC控制XY平面工作台-机电综合实训
接线说明
8
四、增量编码器
参数表:
类别 电源电压 消耗电流 输出方式 起动转矩 允许最高转速
参数 DC12V-24V 100mA Max 集电极电路输出 9.8mN.m以下 500rpm
它的特点是: (1)可以直接读出角度坐标的绝对值; (2)没有累积误差; (3)电源切除后位置信息不会丢失。但是分辨率是由二进制的 位数来决定的,也就是说精度取决于位数,目前有 10 位、14 位 等多种。
(1)PLC I/O 地址分配表:
PLC 输入
X00
高速计数器 A 相
X01
高速计数器 B 相
X11-PX1
X 轴左侧限位开关
X12-PX2
X 轴近点
X13-PX3
X 轴右侧限位开关
X14-PX4
Y 轴下方限位开关
X15-PX5
Y 轴近点
X16-PX6
Y 轴上方限位开关
绝对编码器 I+ FX3U-4AD1V+
目录
1. 《机电控制综合实践》任务书 ………………………… 3
2. 系统设计方案 …………………………………………… 4 3. 硬件分析 ………………………………………………… 5 4. 主要元器件明细表 ………………………………………12 5. 电路原理图 ………………………………………………13 6. 端子排安装与接线 ………………………………………14 7. I/O 地址分配表、PLC 程序 ……………………………15 8. 调试流程并按流程工作 …………………………………24 9. 参考资料 …………………………………………………26 10.实训心得与建 ……………………………………………27
步进电机 ( 2S56Q-0 30B5)
xy运动平台插补实验报告

二维插补原理及实现实验实验报告1.实验目的掌握逐点比较法、数字积分法、数据采样法等常见直线插补、圆弧插补原理和实现方法;通过利用运动控制器的基本控制指令实现直线插补和圆弧插补,掌握基本数控插补算法的软件实现原理。
2.实验原理直线插补和圆弧插补的计算原理。
数控系统加工的零件轮廓或运动轨迹一般由直线、圆弧组成,对于一些非圆曲线轮廓则用直线或圆弧去逼近。
插补计算就是数控系统根据输入的基本数据,通过计算,将工件的轮廓或运动轨迹描述出来,边计算边根据计算结果向各坐标发出进给指令。
数控系统常用的插补计算方法有:逐点比较法,数字积分法,时间分割法,样条插补法等。
3.实验内容在进行以下实验时,应注意XY 平台行程范围。
实验前,先将X 轴、Y 轴回零或手动调整至合适位置,以避免运动中触发限位信号。
XY 平台X 轴、Y轴回零操作以及位置手动调整的具体方法请参阅运动控制平台软件使用说明书。
当采用步进平台进行下列实验时,应注意合成加速度和速度值不宜设置过大,否则有可能由于步进电机启动频率过高,导致失步。
3.1直线插补1. 检查实验平台是否正常,打开电控箱面板上的电源开关,使系统上电;2.双击桌面“MotorControlBench.exe”图标,打开运动控制平台实验软件,点击界面下方按钮,进入如下图所示二维插补实验界面;3. 输入合成速度和合成加速度;参考设置合成速度=1m/min,合成加速度=15m/min2。
4. 在“插补方式”的下拉列表中选择“XY 平面直线插补”,输入X 终点和Y 终点的值;参考示例如下图所示,设置终点(X)=30mm,终点(Y)=40mm;5. 点击使伺服上电;6. 将平台 X 轴和Y 轴回零;回零方法如下:点击“X 轴回零”按钮,X 轴将开始回零动作,待X 轴回零完成,点击“Y 轴回零”按钮,使Y 轴回零。
7. 在 XY 平台的工作台面上,固定实验用绘图纸张,点击“笔架落下”按钮, 使笔架上的绘图笔尖下降至纸面;8. 确认参数设置无误且 XY 平台各轴回零后,点击“运行”按钮;9. 观察 XY 平台上对应电机的运动过程及界面中图形显示区域实时显示的插补运动轨迹。
XY运动平台实验指导书_V2.2

GXY系列 XY平台实验指导书Version 2.22008.05版权声明固高科技(深圳)有限公司保留所有版权固高科技有限公司(以下简称固高科技)具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或间接的复制、制造、加工、使用本产品及相关部分。
声明固高科技保留在不预先通知的情况下修改设备和文档的权力。
固高科技不承担由于使用本说明书或本产品不当,所造成的直接的、间接的、特殊的、附带的、或相应的损失和赔偿。
安全注意事项XY平台主要用于教学和科研。
在安装,使用和维护之前,请仔细阅读XY平台使用手册的相关文档。
并将XY平台使用手册备在身边,以备需要时随时查阅。
使用注意事项使用(安装、运转、保养、检修)前,请务必熟悉并全部掌握本手册和其它相关资料,在熟知全部机器知识、安全知识、以及注意事项后再使用设备。
本手册将安全注意事项分为“危险”“注意”“强制”“禁止”分别记载。
表 1-1警告标志不正确的操作将会导致重大人身事故。
不正确的操作会导致设备损坏。
必须要做的操作。
被禁止的操作。
另外,即使“注意”所记载的内容,也可能因为不同的情况产生严重后果,因此任何一条注意事项都很重要,在设备使用过程中请严格遵守。
虽然不符合“危险”“注意”的内容,但是用户在使用过程中必须严格遵守的事项,在相关地方以记载。
前言XY平台是许多数控加工设备和电子加工设备(如:数控车床的纵横向进刀装置、数控铣床和数控钻床的XY工作台、激光加工设备工作台,表面贴装设备等)的基本部件,也是进行相关科学研究和设备开发的理想模型。
本实验系统选用的XY平台采用了模块化设计思想和工业化制造标准,具有现实工业意义和广泛的应用背景。
本实验指导书以运动控制技术为主要实验内容,以XY运动平台为实验对象。
适用于机械制造及自动化、机电工程、运动控制技术、数控技术等相关专业的实验教学。
实际使用时,用户可根据不同课程的教学实验需要选择相关内容。
目录版权声明 (II)声明 (II)安全注意事项 (III)使用注意事项 (III)前言 (IV)第1章概述 (1)1.1 运动控制技术基础 (1)1.1.1 运动控制系统简介 (1)1.1.2 运动控制器 (2)1.1.3 运动控制器与伺服系统的匹配 (2)1.1.4 运动控制系统典型应用 (3)1.2 XY平台系统组成 (4)第2章电机与驱动(执行)装置实验 (5)2.1 实验目的 (5)2.2 知识回顾 (5)2.3 实验设备 (6)2.4 实验步骤 (6)2.5 实验总结 (8)第3章直流伺服电机速度环阶跃法辨识实验 (10)3.1 实验目的 (10)3.2 基础知识 (10)3.2.1 直流伺服电机概述 (10)3.2.2 直流伺服电机模型 (10)3.2.3 一阶系统的阶跃辨识(飞升法)原理 (12)3.3 实验设备 (13)3.4 实验步骤 (13)3.5 实验要求及总结 (14)第4章直流伺服电机位置环PID调整实验 (15)4.1 实验目的 (15)4.2 实验原理 (15)4.2.1 数字式PID控制器 (15)4.3 实验设备 (16)4.4 实验步骤 (16)4.5 实验总结 (17)第5章运动控制器的调整-PID控制器的基本控制作用 (18)5.1 实验目的 (18)5.2 基础知识 (18)5.3 实验设备 (18)5.4 实验步骤 (19)5.5 实验总结 (22)第6章单轴电机运动控制实验 (23)6.1 实验目的 (23)6.2 基础知识 (23)6.2.1 加减速控制 (23)6.2.2 电子齿轮 (24)6.3 实验设备 (25)6.4 实验步骤 (25)6.4.1 T曲线、S曲线运动模式实验 (25)6.4.2 单轴速度控制模式运行实验 (27)6.4.3 电子齿轮模式运行实验 (28)6.5 实验总结 (30)第7章二维插补原理及实现实验 (31)7.1 实验目的 (31)7.2 实验原理 (31)7.2.1 逐点比较法直线插补 (31)7.2.2 逐点比较法圆弧插补 (32)7.2.3 数字积分法直线插补 (34)7.2.4 数字积分法圆弧插补 (35)7.2.5 数据采样法插补 (37)7.2.6 合成速度与加速度 (39)7.3 实验设备 (40)7.4 实验内容 (40)7.4.1 二维直线插补实验 (40)7.4.2 圆弧插补(圆心/角度型)实验 (42)7.4.3 圆弧插补(终点/半径型)实验 (42)7.4.4 逐点比较法直线插补实验 (43)7.4.5 逐点比较法圆弧插补实验 (44)7.4.6 数字积分法直线插补实验 (45)7.4.7 数字积分法圆弧插补实验 (45)7.4.8 数据采样法直线插补实验 (46)7.4.9 数据采样法圆弧插补实验 (47)7.4.10 插补算法的高级语言编程实验 (47)7.5 实验总结与思考 (48)第8章丝杠反向间隙实验 (49)8.1 实验目的 (49)8.2 实验原理 (49)8.2.1 光栅尺与旋转编码器 (49)8.2.2 反向间隙测试原理 (49)8.3 实验设备 (50)8.4 实验步骤 (50)8.5 实验总结 (51)第9章数控代码编程实验 (52)9.1 实验目的 (52)9.2 基础知识 (52)9.3 实验设备 (54)9.4 实验步骤 (54)9.4.1 数控代码运行认识实验 (54)9.4.2 编写数控代码(G00/G01/G02/G03/G04指令)实验 (55)9.4.3 G17/G18/G19指令编程实验 (58)9.4.4 G90/G91/G92指令编程实验 (61)9.5 实验报告及总结 (63)第1章 概述1.1运动控制技术基础1.1.1运动控制系统简介运动控制起源于早期的伺服控制,简单地说,运动控制就是对机械运动部件的位置、速度等进行实时的控制管理,使其按照预期的轨迹和规定的运动参数(如速度、加速度参数等)完成相应的动作。
苹果不越狱怎么装XY苹果助手 不越狱怎么用XY苹果助手

苹果不越狱怎么装XY苹果助手不越狱怎么用XY苹果助手谁说只有越狱的iPhone才能使用XY苹果助手?把iPhone连接到其他的电脑上,并不是每个人都会将自己的iphone越狱的,有的人不小心将iPhone升级到最新版本而没有办法越狱;有的人怕越狱后出不小心白苹果;有的人自己手动越狱过了多次,但是就是越狱不成功;有的人则是第一次接触iPhone,一些基础知识还不是很清楚,不敢轻举妄动...那这些没有越狱的iPhone只能通过iTunes来同步音乐和应用程序吗?或许也有很多人会认为iPhone要越狱才能使用XY苹果助手,其实不然,暂时还没有越狱的iPhone也可以连接XY苹果助手,而且还能通过XY苹果助手轻松管理你的苹果设备。
那些还没有越狱的童鞋们赶紧把XY苹果助手更新到最新版本啦!也许有的人之前很经常使用iTunes来管理iPhone上的音乐和应用程序,但是对于itunes,很多人是又爱又恨,在自己家里的电脑上往itunes里面添加歌曲视频,到公司或者别人的电脑上一同步,歌曲视频神马的全丢了。
没办法,只能把公司电脑上itunes的歌曲同步功能给关了,但万一碰到灰常喜欢的歌曲时,只能在添加新歌曲和抹除iPhone上旧歌曲之间作出艰难的决定。
不越狱iphone怎么使用XY苹果助手1.通过数据线将已经激活的iOS设备与电脑连接;2.打开电脑上的XY苹果助手;3.等XY苹果助手识别到iOS设备;4.挑选一款喜欢的应用程序,点击“安装”按钮;如果你想卸载这个应用程序,在iPhone上,长按某个ipa图标,直到图标左上角出现一个删除按钮时,点此按钮卸载后,再按“Home”键确定即可。
虽然没有越狱解锁也可以使用XY苹果助手,但还是建议大家将iphone越狱破解,毕竟越狱后的iPhone可玩性大大提高了。
如果你的iPhone误升级了,点击查看iphone越狱最新资讯。
XY工作台说明书
错误!未指目录 ........................................错误!未指定书签。
1 •摘要错误!未指定书签。
2 •技术要求 ......2.1设计题目・・・・・・・, 2.2技术数据・・・・・・・, 2.3设计要求・・・・・・・, 3•总体构造设计・・・・・・・・,3.1滚珠丝杠选取....................................... 错误!未指定书签。
3.2滚珠丝杠副 ......................... 错误!未指定书签。
....................................... 错误!未指定书签。
....................................... 错误!未指定书签。
3. 3稳定性运算,空载运行时工作台的速度.••错误!未指定书签。
....................................... 错误!未指定书签。
....................................... 错误!未指定书签。
3.4滚动导轨 ........................... 错误!未指定书签。
....................................... 错误!未指定书签。
5 ...................................... 错误!未指定书签。
3.5选取电机 ........................... 错误!未指定书签。
....................................... 错误!未指定书签。
....................................... 错误!未指定书签。
4 •结语................................... 错误!未指定书签。
x-y数控工作台说明书(参考Word)

数控台铣X-Y工作台进给伺服系统设计指导老师: 张健班别: 机制1052姓名: 陈石育学号: 200511411202目录第一章系统的总体方案设计 (2)第二章机械系统设计 (3)2.1 脉冲当量和传动比的确定 (3)2.2 传动系统等效转矩惯量计算 (3)2.3 工作载荷分析及计算 (4)2.4 滚珠丝杠螺母副的选型和校核 (5)2.5 导轨的选型和计算 (8)2.6 驱动电机的选择 (9)第三章控制系统设计 (12)3.1 控制系统硬件的基本组成 (12)3.2 接口程序初始化及步进电机控制程序 (15)3.3 直线圆弧插补程序设计 (16)参考文献 (23)原始数据设计一个数控XY工作台及其控制系统。
该工作台可安装在铣床上,用于铣削加工。
设计参数如下:最大铣刀直径mm最大铣削宽度最大铣削深度加工材料工作台加工范围(mm)最大移动速度32 mm16mm6mm碳钢X=500,Y=450 3 m/min第一章系统的总体方案设计图1-1 系统总体方案由设计任务书可知,本次设计可以采取以下方案:1.1 机械系统1.1.1 传动系统采用滚珠丝杠和联轴器传动1.1.2 导向系统采用滚珠直线导轨1.1.3 执行电机采用步进电动机1.2 传感系统本次设计的系统精度不高,载荷不大,因此采用开环控制。
1.3控制系统采用步进电机来实现驱动,一般情况下多采用开环控制。
因为步进电机的输出转角与控制器提供的脉冲数有着正比关系,电机转速与控制器提供的脉冲频率成正比。
因此通常在精确度要求不是很高时,采用步进电机是合理的。
当然,由于步进电机具有高频易失步,负载能力不强的缺点。
ea p a图1-2开环控制流程图第二章 机械系统设计2.1 脉冲当量和传动比的确定根据机床或工作台进给系统所需要的定位精度来选定脉冲当量。
考虑到机械传动系统的误差存在,脉冲当量值必须小于定位精度值。
本次设计给定脉冲当量 为0.01mm 。
根据脉冲当量和系统总体方案,还有混合式步进电动机的优点,在网上(/docc/product.htm )暂选57BYG4504型的步进电动机。
数控xy工作台课程设计

数控xy工作台课程设计一、教学目标本课程的教学目标是使学生掌握数控XY工作台的基本原理、结构及其操作方法。
通过本课程的学习,学生应能理解数控XY工作台的工作原理,熟悉其结构组成,并能熟练操作数控XY工作台进行各种加工操作。
1.了解数控XY工作台的工作原理。
2.熟悉数控XY工作台的结构组成。
3.掌握数控XY工作台的操作方法。
4.能够正确操作数控XY工作台。
5.能够根据加工要求进行参数设置。
6.能够进行数控XY工作台的维护和故障排除。
情感态度价值观目标:1.培养学生的团队合作意识。
2.培养学生的创新精神和实践能力。
3.培养学生的职业素养,使其具备良好的工作态度和职业道德。
二、教学内容本课程的教学内容主要包括数控XY工作台的基本原理、结构组成及其操作方法。
1.数控XY工作台的基本原理:介绍数控XY工作台的工作原理,包括数控系统的组成、工作原理及其与XY工作台的关系。
2.数控XY工作台的结构组成:介绍数控XY工作台的各个部分,包括主机、控制系统、执行机构等,并详细讲解各部分的功能和作用。
3.数控XY工作台的操作方法:讲解如何进行数控XY工作台的操作,包括操作界面、操作步骤、参数设置等,并通过实际操作演示,使学生能够熟练掌握。
三、教学方法本课程采用讲授法、讨论法、实验法等多种教学方法相结合,以激发学生的学习兴趣和主动性。
1.讲授法:通过讲解数控XY工作台的基本原理、结构组成及其操作方法,使学生掌握相关知识。
2.讨论法:学生进行分组讨论,引导学生思考和分析数控XY工作台的相关问题,提高学生的解决问题的能力。
3.实验法:安排实际操作实验,使学生能够将所学知识运用到实际操作中,提高学生的实践能力。
四、教学资源本课程所需教学资源包括教材、实验设备等。
1.教材:选用权威、实用的教材,为学生提供系统的学习资料。
2.实验设备:准备现代化的数控XY工作台设备,供学生进行实际操作练习。
通过以上教学资源的支持,为学生创造良好的学习环境,提高学生的学习效果。
系统监控工具Xymon安装简介

系统监控工具Xymon安装简介原创作者:丁宁(7点测试论坛版主,论坛ID:丁宁)Xymon,发音为"Simon",当前可以下载到的最新版本为Xymon 4.3.0-0.beta2,在4.2.2 版本之前,这个工具叫做hobbit,我还是更喜欢喜欢叫它hobbit。
Xymon是一个开源的监控工具,可以监控linux、windows、*nix 等等系统,vista 目前不支持。
Xymon通过客户端程序来采集被监控端的系统状态,并通过web 页面将被监控端系统的状态显示出来,xymon可以将被监控系统的历史状态记录下来并且用图表显示出状态变化的趋势。
/是Xymon的一个实例,大家可以通过这个实例直观的了解它的展示方式。
也可以通过下面的图来看一下Xymon的web展示界面。
下面的图,是我自己装的一个监控系统。
其中,hh是windows XP系统,hobbit是debian系统,localhost是RHEL5系统。
Xymon服务器的安装需要以下几个先决条件:1、一个类unix系统,目前的Xymon server还只能安装在类unix系统上;2、一个web应用服务器,推荐apache2;3、系统中要有C编译器,例如gcc,因为Xymon是用C编写的;4、PCRE - Perl Compatible Regular Expression library,可以在/下载到;5、RRDtool,,rrdtool是一个可以对时间序列数据进行记录和图形化显示的数据库,可以在http://oss.oetiker.ch/rrdtool下载;6、Libpng,rrdtool用这个库来产生png格式的图像,可以在/pub/png/libpng.html下载;7、OpenSSL,可以在/下载;8、OpenLDAP,如果你想监控系统目录服务器的状态,就需要用到它,可以在/下载;99、Intltool,这个工具是rrdtool安装的前提;10、XML- Parser,这个包是perl语言用来解析XML的工具。
平台软件安装调试手册说明书

平台软件安装调试手册版权申明深圳市鹏鼎智控科技有限公司保留所有权利深圳市鹏鼎智控科技有限公司保留在不事先通知的情况下,修改本手册中的产品和产品规格等文件的权力。
我司不承担由于使用本手册或本产品不当,所造成直接的、间接的、特殊的、附带的或相应产生的损失或责任。
我司具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
联系我们深圳市鹏鼎智控科技有限公司地址:深圳市光明区公明街道东周社区康佳科技中心A11层H11目录1.简介 (1)1.1版本说明 (1)1.2专业术语 (1)1.3软件支持与特性 (1)1.4运动控制卡支持 (3)2.软件安装调试 (5)2.1软件安装 (5)2.2软件调试 (11)2.2.1控制卡连接 (11)2.2.2控制卡参数概述 (19)2.2.3轴调试 (23)2.2.4控制卡IO概述 (40)2.2.5IO调试 (43)2.2.6激光器调试 (55)3.附录 (58)3.1PDS2000-4配线 (58)3.1.1驱动器接口(电机1~电机4) (58)3.1.2手轮输入接口 (59)3.1.3轴扩展接口(激光) (60)3.1.4控制卡尺寸 (60)3.2PDS2000-8配线 (61)3.2.1驱动器接口(电机1~电机8) (61)3.2.2手轮输入接口 (61)3.2.3扩展接口(激光) (62)3.2.4控制卡尺寸 (63)3.3IO32M01配线 (63)3.3.1RS485连接 (63)3.3.2控制卡尺寸 (64)3.4IO64M01 (64)3.4.1RS485连接 (64)3.4.2控制卡尺寸 (65)3.5GTS-400-PG-VB-LASER端子板配线 (65)3.5.1驱动器接口(CN1~CN4) (65)3.5.2手轮输入接口(CN20) (66)3.5.3激光控制接口(CN14+CN21) (66)3.5.4控制卡尺寸 (67)3.6GTS-800-PG-PCI-G-LASER端子板配线 (68)3.6.1驱动器接口(CN1~CN8) (68)3.6.2手轮输入接口(CN20) (68)3.6.3激光控制接口(CN14+CN21) (68)3.6.4控制卡尺寸 (70)3.7HCB2-1616-DTD01配线 (70)3.7.1RS422连接 (70)3.7.2控制卡尺寸 (71)1.简介1.1版本说明版本号更新说明软件版本号更新人更新时间V1.0初版Ver1.0.4.210622江检元2021/07/08 V1.1激光器调试与附件更新Ver测1.020210721江检元2021/08/11 V1.2附件更新Ver测1.020211022江检元2021/11/021.2专业术语专业术语术语说明PWM激光器调制信号DA模拟量信号1.3软件支持与特性支持或特性图例激光波形控制渐进渐出4轴插补集成自研CCD视觉软件集成自研WOB软件(摇摆头)支持多种详见“运动控制卡支持”运动控制卡1.4运动控制卡支持卡型号支持或特性图例PDS2000-4(GC 卡)以太网通讯运动轴×4专用IO 输入×23专用IO 输出×4通用IO 输入×21通用IO 输出×16手轮专用接口×110V-DA 输出×15V/24V-PWM 输出×1支持IO 扩展PDS2000-8(GC 卡)以太网通讯运动轴×8专用IO 输入×39专用IO 输出×8通用IO 输入×21通用IO 输出×16手轮专用接口×110V-DA 输出×15V/24V-PWM 输出×1支持IO 扩展IO32M01(GC 卡)支持扩展与独立使用扩展:RS485通讯独立:USB2.0通讯通用IO 输入×16通用IO 输出×16IO64M01(GC 卡)支持扩展与独立使用扩展:RS485通讯独立:USB2.0通讯通用IO 输入×32通用IO 输出×32GTS-400-PG -VB-LASER (GTS 卡)PCIE 通讯运动轴×4专用IO 输入×23专用IO 输出×4通用IO 输入×16通用IO 输出×16手轮专用接口×110V-DA 输出×15V-PWM 输出×1支持IO 扩展GTS-800-PG -PCI-G-LASER (GTS 卡)PCIE 通讯运动轴×8专用IO 输入×39专用IO 输出×8通用IO 输入×16通用IO 输出×16手轮专用接口×110V-DA 输出×15V-PWM 输出×1支持IO 扩展HCB2-1616-DTD01(GTS 卡)支持扩展与独立使用RS422通讯通用IO 输入×16通用IO 输出×162.软件安装调试2.1软件安装链接:9789/resource/,进入本公司文件下载系统:点击,进入平台软件下载页:软件有多个版本,分别为与,以标准平台软件为例(注:实际请根据加密狗所支持的版本进行下载),点击进行下载:先将控制卡连上工控机并上电、加密狗插上工控机,双击开始安装:点击进入下一步:在中输入JK0803,点击进入下一步:点击设置软件安装路径(无特殊情况不要将路径设置在C盘下),点击进入下一步:此页面为软件开始菜单路径设置,通常默认即可,点击进入下一步:如需创建软件桌面图标则勾选,点击进入下一步:点击开始将软件安装至所设置的路径下:当安装进度完成,弹出:通常操作系统会自带.NET Framework4组件,如提示不需要安装,点击进入下一步:点击弹出:选择对应的卡类型,点击进入下一步:点击完成软件安装,工控机桌面生成软件图标:2.2软件调试2.2.1控制卡连接GC卡控制卡上电,插上网线,检查“PWR”电源指示灯是否亮起:如果指示灯不亮,对电气线路进行排查,如果指示灯亮起,上电正常进入控制面板\网络和Internet\网络连接,界面如下:右键点击,弹出菜单栏:点击,进入属性界面:双击,进入IPv4属性设置界面:设置IP地址与子网掩码,点击保存设置GTS卡控制卡上电,插上PCIE通讯线(CN17接口),检查电源指示灯与+5V指示灯是否亮起:如果指示灯不亮,对电气线路进行排查,如果指示灯亮起,上电正常进入设备管理器,界面如下:点击展开其他设备列表,右键点击,弹出菜单栏:点击,弹出:点击,弹出:点击选择与工控机系统位数对应的驱动程序文件:工控机系统位数驱动程序文件路径32位软件根目录\Drivers\gts\new\Driver_32 64位软件根目录\Drivers\gts\new\Driver_64点击开始安装驱动程序,安装完成后显示:点击退出安装设备管理器中显示,驱动安装成功2.2.2控制卡参数概述打开控制卡参数设置界面:控制卡通用参数说明:卡号显示与切换设置卡类型,点击选择对应的控制卡类型,目前支持GC卡、GTS卡、ACS卡在中输入轴个数(≤控制卡支持轴数),点击进行界面显示与参数刷新设置卡通讯IP,用于GC卡、ACS卡通讯设置设置轴运动的最大速度上限与最大加速度上限切换显示各轴参数设置龙门双驱功能,勾选,点击、选择对应的主轴、从轴号,在中设置跟随误差(主轴、从轴的轴反馈模式需设置为),即可启用龙门双驱功能勾选,流程中一个G00工具及后续动作作为一个控制卡缓冲区,定点位置更精确;取消勾选,流程中所有的工具作为一个控制卡缓冲区,运行动作衔接更流畅此参数目前已无效,轴位置显示会根据轴反馈模式自动切换设置当安全光栅被触发时,点动运行是否有效设置扩展IO模块,勾选,点击选择对应的扩展IO地址,即可启用扩展IO模块设置控制卡缓冲区最大插补线段数量,值范围为0~40000,通常针对导入CAD图形后加工速度提不起来时进行设置点击,对设置的通用参数及轴参数进行保存(注:所有控制卡参数需重启软件生效)单轴参数说明:轴控参数自定义轴名称,限两位字母或数字当前轴号所对应的控制卡轴口号,默认与轴号对应设置轴模式,点击选择对应的模式,目前支持“平移轴”与“旋转轴”设置轴反馈模式,点击选择对应的模式,目前支持“内部脉冲计数”与“外部编码器”与对应驱动器的每转脉冲数设置为一致,即电机每转一圈需要发送的脉冲数量设置轴传动丝杆的螺距仅旋转轴有效,设置最大的旋转件半径,软件通过此参数计算出旋转件周长,旋转轴的运行速度为线速度,半径越小周长越短,同样线速度的情况下旋转轴角速度越大,从而影响旋转轴的速度当量电机直接驱动轴时,减速比为1,而当电机通过减速机驱动轴时,则设置减速机的减速比回零参数目前支持多种回零模式:“正限位为原点”“负限位为原点”“正向HOME点”“负向HOME点”“正向Z向”“反向Z向”“正限位后Z向”“负限位后Z向”设置高速回零的速度与加速度设置低速回零的速度与加速度设置回零次数,默认为2次,第1次为高速回零,提高回零效率,第2次为低速回零,确保回零精度设置回零返回距离,用于限位为原点模式下,找到原点后运动一段距离以避开限位开关(回正限位时返回距离为负值,回负限位时返回距离为正值)信号、电平参数设置限位信号与信号电平,勾选启用限位信号,勾选限位信号电平取反设置驱动器报警信号与信号电平,勾选启用报警信号,勾选报警信号电平取反设置脉冲方向,勾选脉冲方向取反,即轴运行反向点动参数设置点动按钮方向,勾选,“图形界面”上点动按钮反向设置高速点动的速度与加速度设置中速点动的速度与加速度设置低速点动的速度与加速度其他参数设置轴软限位,勾选开启软限位,在中设置负向软限位,在中设置正向软限位即可设置加减速平滑滤波,勾选开启滤波功能,在中设置滤波系数,值范围为0~65535,值越大加减速越平滑2.2.3轴调试准备工作一、控制卡状态::确定控制卡打开正常二、轴使能状态:用手去推各轴,会出现以下几种情况:1、可以比较轻松的推动,说明轴使能异常,可以先确认控制卡使能信号,查看控制卡使能指示灯是否亮起,各控制卡的信号指示灯位置如下:GC卡:GTS卡:如果指示灯不亮,重启软件后再查看,而如果指示灯亮起,对电气线路进行排查2、所推的轴用的是带抱闸电机,且完全无法推动,先参考情况1对轴使能进行排查,再确认电机抱闸是否打开3、有反作用力,说明轴使能正常三、限位状态::确定限位状态正常,如果有异请参考本章节中的“限位”进行调试轴控参数常用的轴可以分为:电机丝杆传动、直线电机、旋转轴,下面分别介绍这几种轴的参数设置一、电机丝杆传动::设为平移轴:设为驱动器每转脉冲数:设为传动丝杆螺距:电机丝杆直连设为1,带减速机构设为减速机构的减速比二、直线电机::设为平移轴:设为1直线电机的每转脉冲数与螺距有两种表达方式:毫米脉冲数、脉冲数/截距1、毫米脉冲数设置方式::设为毫米脉冲数:设为12、脉冲数/截距设置方式::设为截距脉冲数:设为截距值三、旋转轴::设为旋转轴:设为驱动器每转脉冲数:设为360:设为最大旋转件的半径值:电机转盘直连设为1,带减速机构设为减速机构的减速比轴方向一、点动设置:在“绘图界面”中,将坐标值清零,点击弹出:在中输入图片中显示的验证码,点击完成验证,所有轴的坐标值清零:取消点动当量,将设为0,即手动连续运动设置点动速度,点击,弹出下拉框:选择,以降低点动速度,防止因参数错误导致轴运动过快,后续调试中可以根据实际情况来调整点动速度二、平移轴:平移轴X0示意图如下:先确定轴的方向(机械方向),假设X0轴左边为负向、右边为正向先按下点动按钮中的,X0轴的运动方向有两种:1、X0轴向负向运动:抬起,点击将坐标值清零,按下,再对X0轴的运动方向进行判断2、X0轴向正向运动:对X0轴的运动坐标值进行观察,其坐标值的趋势有两种:1、X0轴运动坐标值越来越小:即平台运动方向与机械方向相反,设置方式为:GC卡在对应的单轴参数界面中勾选,将脉冲输出方向进行取反GTS卡在对应的驱动器上面设置脉冲反向,或将脉冲方向线进行调换3、X0轴运动坐标值越来越大:即平台运动方向与机械方向相同,脉冲输出方向正常三、旋转轴:旋转轴A展开示意图如下:其调试方式与平移轴大致相同限位一、限位电平:平移轴X0示意图如下:正负限位开关没有被触发时,正负限位指示有两种情况:在对应的单轴参数界面中勾选,将限位有效电平进行取反限位电平正常二、限位方向:用一张金属片分别去触发正负限位,平移轴X0示意图如下:先观察限位指示情况:限位触发信号正常限位触发信号异常,对电气进行检查再对限位方向进行判断:1、工作台能向已经触发限位的方向运动,而不能向没有触发限位的方向运动:则正负限位方向反了,将板卡上面对应轴的正负限位信号线进行调换,再进行限位方向调试2、工作台能向没有触发限位的方向运动,而不能向已经触发限位的方向运动:则正负限位方向正常点动按钮一、点动按钮方向:平移轴X0示意图如下:按下点动按钮进行正负运动,有两种情况:1、点动方向与工作台运动方向相反:按下,工作台向负向运动:按下,工作台向正向运动:则点动按钮方向反了,在对应的单轴参数界面中勾选,将点动按钮方向进行取反2、点动方向与工作台运动方向相同:按下,工作台向正向运动:按下,工作台向负向运动:则点动按钮方向正常画布打开系统设置界面,在“基本参数”页面中的“画布设置”组:一、画布大小:≥﹙X轴行程×2﹚≥﹙Y轴行程×2﹚≥﹙Z轴行程×2﹚二、画布方向:1、画布X方向:按下点动按钮进行正负运动,观察画布上光标的运动方向,如果点动方向与光标方向相同,则画布X方向正常,而如果点动方向与光标方向相反,则反选,将画布进行反向2、画布Y方向:按下点动按钮进行正负运动,观察画布上光标的运动方向,如果点动方向与光标方向相同,则画布Y方向正常,而如果点动方向与光标方向相反,则反选,将画布进行反向实际运动距离校验一、平移轴:点击将坐标值清零将设为10,即以10为距离进行相对运动平移轴X0示意图如下:找一个基准点,测量并记录工作台到基准点的距离“L1”,点击让轴进行相对运动:等轴运动到坐标点10时,测量并记录工作台到基准点的距离“L2”,再对实际运动距离进行计算:L=L1-L2然后对距离进行校验:L=10校验成功L≠10校验失败,有三种方式进行处理:1、重新对实际运动距离进行校验,防止校验时出错2、检查对应的单轴参数和驱动器参数3、计算实际每转脉冲数,修改对应的单轴参数,计算方法为:实际每转脉冲数=当前每转脉冲数×﹙10÷L﹚二、旋转轴:点击将坐标值清零将设为360,相对运动360度,即旋转一圈旋转轴A展开示意图如下:记录旋转平台角度A1,点击让轴进行相对运动:等轴运动到坐标点360时,记录旋转平台角度A2,然后对旋转角度进行校验:A1=A2校验成功A1≠A2校验失败,有三种方式进行处理:1、重新对实际运动距离进行校验,防止校验时出错2、检查对应的单轴参数和驱动器参数3、计算实际每转脉冲数,修改对应的单轴参数,计算方法为:实际每转脉冲数=当前每转脉冲数×﹙360÷实际旋转角度﹚回零一、单轴回零参数设置::设置回零模式:首次回零,将回零速度设慢一点:设为2,两次回零:设置方式为:回零模式回零返回距离建议设为-5,实际距离区间大致为-2~-10,保证此距离可以避开正限位即可建议设为5,实际距离区间大致为2~10,保证此距离可以避开负限位即可其他回零模式建议设为0二、回零测试:首次回零,先测试单轴回零,待所有单轴回零测试正常后,再进行整体回零1、机械回零校正设置:打开示教界面,在“机械回零校正”组:点击弹出:此界面可对软件回零参数进行设置:启用开机回零,并设置回零方式:“阻塞回零”(等待回零完成再进行下一步动作)与“后台回零”(不等待回零完成直接进行下一步动作)标准回零方式,可设置回零轴及回零顺序回零轴列表,回零顺序为从上至下:点击展开,选择回零轴号:是否等待轴回零完成再进行下一步动作:确认增加回零轴选中回零轴列表中的一个轴,对其回零顺序进行调整选中回零轴列表中的一个轴,对其进行删除回零完成后,是否将软件坐标清零回零完成后,是否发送回零完成信号:回零完成信号输出IO号:点击展开回零完成信号置位方式:“信号持续50ms后置位”与“下次回零开始时置位”当标准回零方式无法满足回零动作时,如回零前要判断IO状态或进行IO输出等,就需要使用脚本回零点击编辑回零脚本保存回零参数2、单轴回零测试:以X0轴回零测试为例:设置1号轴回零,点击保存点击,校验完成后开始回零:如果出现异常,可点击中止当前回零轴驱动器报警(非必须)打开IO通讯设置界面,在“专用IO显示”页面中的驱动器报警信号“AxisAlarm”组:这组信号显示:从上至下分别为1~8轴的驱动器报警信号,红色为高电平,绿色为低电平或轴无效先确认驱动器未报警,再判断信号状态,驱动器报警设置方式:信号状态单轴参数设置2.2.4控制卡IO概述打开“输入输出操作”界面:各页面功能简介:页面功能简介控制卡通用IO输入输出状态显示与测试,红色为高电平,绿色为低电平(仅IO扩展)IO扩展卡通用IO输入输出状态显示与测试,红色为高电平,绿色为低电平IO输入信号响应设置,如手轮切换、急停按钮、机台安全门、安全光栅、脚踏、多文档运行等IO输出信号设置,主要用于激光器相关输出信号及延时,如YAG激光器波形切换、保护气、光闸、吹气延时等,输出-1为不启用设置流程运行完成信号软件全局事件变量状态显示,红色为False,绿色为True控制卡专用IO输入状态显示,手轮专用接口输入及各轴正负限位、原点、驱动器报警信号,红色为高电平,绿色为低电平或轴无效2.2.5IO调试基础IO与扩展IO一、测试输出:勾选,启用测试:点击输出点位即可进行输出测试(示例):点击进行IO输出:点击关闭IO输出:二、测试输入(仅基础IO):勾选弹出:点击启用测试:点击输入点位即可进行输入测试(示例):点击进行IO输入:点击关闭IO输入:三、编辑名称:点击开始编辑名称:编辑完毕后,点击保存编辑输入设置输入设置界面,默认显示“手轮选择X”:注:输入响应设置中输出点位相关的设置暂时无效:一、单个IO输入响应设置(示例):点击,弹出IO输入响应事件列表:选择“脚踏”,输入设置切换为:点击,弹出IO系统选择列表:可选择响应控制卡IO与扩展IO卡勾选激活输入点位设置:。
XY平台快速安装与使用_071219
固高科技(深圳)有限公司
深圳巿南山区高新科技园深港产学研基地西二楼 2/F, West Wing, IER Building, High-Tech Park Nanshan, Shenzhen, China Tel: (86) 755 2697 0817; (86) 755 2697 0835 Fax: (86) 755 2697 0846
通用XY平台系列使用说明书列表.................................................................................................. 3 关于操作人员的安全事项 ............................................................................................................... 3 转交本设备时的注意事项 ............................................................................................................... 4 目 录 ...................................................................................................................................................5
XY运动平台控制系统设计
XY运动平台控制系统的设计XY motion platform control system design总计毕业设计 29 页表格 3 个插图19 幅在信息技术迅猛发展的今天,仍然改变不了机械制造业在国民经济的基础地位。
而作为机械中核心部分的控制系统,更是整个装置的灵魂。
而XY运动平台作为机械装置里的基本简易设备,更是一些数控加工装置上的基本部件,在科学研究领域里,也将其视为一种理想模型。
为了设计一个XY平台控制系统,文章中介绍了XY运动平台的当前现状、发展趋势以及它的组成部分,重点论述了控制电路的接线以及功能软件设计。
控制电路的正确连接,直接影响到机械与计算机的正常通讯,在控制电路中,伺服系统便是整个运动控制系统的基础。
关键词:制造业控制系统 XY平台接线伺服系统Today,information technology is developmental rapidly,still can't change the foundation status of mechanical manufacturing industry in the National economy.And as a core part of the mechanical control system, it is also the soul of the whole device. XY motion platform as a mechanical device the basic simple equipment,it is also the basic components in the numerical control device;in the scientific research field, also as a kind of ideal model.In order to design a XY platform control system, The article introduces the current situation and development trend and constituent part of XY motion platfor, it mainly discusses the control circuit connection and the function of the software design. Control circuit of correct connection, directly influence communications of the machinery and the computer, the servo system is the foundation of whole motion control system in the control circuit .Key Words: Manufacturing industry ; Control system; XY platform; Connection; Servo system摘要 (I)Abstract (II)第一章绪论 (1)1.1运动控制发展现状 (1)1.2 发展趋势 (1)第二章 XY运动平台控制概述 (2)2.1 XY运动平台控制系统 (2)2.2 GT系列运动控制器介绍 (2)2.3平台位置检测装置 (4)2.4 伺服控制系统 (5)第三章系统总体设计方案 (6)第四章系统硬件电路连接 (7)4.1伺服电机的选用 (7)4.2 驱动器 (8)4.3电路接线 (10)4.3.1、设置跳线 (10)4.3.2把运动控制卡安装在计算机上 (11)4.3.3 使主机和控制器之间建立起通讯 (11)4.3.4 电机和驱动器的连接 (11)4.3.5控制卡和端子板的连接 (15)4.3.6 连接端子板电源 (15)4.3.7 输入输出连接 (16)4.3.8 编码器输入接线 (17)4.3.9 模拟量控制输出接线 (17)第五章系统控制软件设计 (18)5.1 人机操作界面 (18)5.2 二维插补 (23)5.2.1逐点比较法直线插补 (23)5.2.2 逐点比较法圆弧插补 (25)第六章系统调试............................................. 错误!未定义书签。
[整理]XY工作台说明书.
![[整理]XY工作台说明书.](https://img.taocdn.com/s3/m/7892d95b67ec102de3bd8938.png)
目录一、设计说明(一)设计任务(二)总体方案的确定(三)系统总体方案设计二、机械部分设计(一)脉冲当量的选定(二)步进电机的选用(三)计算铣削力(四)滚珠丝杠副的选用(五)工作台尺寸确定:(六)滚珠丝杠长度确定(七)丝杠传动效率计算(八)丝杠稳定性验算(九)丝杠刚度验算(十)计算减速器传动比(十一)齿轮机构设计(十二)传动系统是转动惯量计算(十三)步进电动机负载能力校验(十四)导轨的选型及计算三、控制系统电路设计(一)接口设计(二)伺服系统设计(三)步进电机驱动电路设计(四)运动控制器控制原理四、控制软件结构设计(一)直线插补程序(二)圆弧插补程序参考文献一、设计说明本设计是以PC平台为基础的数控X-Y工作台实验系统,它具有直线插补和圆弧插补等数控系统所使用的常用功能,结构简单,操作方便,控制精度相对较高, 可靠性、稳定性和实用性都很好。
X、Y两方向的运动各由一台步进电机控制。
数控系统每发出一个信号,步进电机就走一步,并通过中间传动机构带动两方向的丝杠旋转,分别使得X、Y工作台进给。
数控系统由单片机、键盘、变频检测系统构成,具有间隙补偿、直线插补、圆弧插补、断丝自动处理等主要功能。
线切割的适用对象主要是难切割材料,如高强度、高韧性、高硬度、高脆性、磁性材料,以及精密细小和形状复杂的零件。
线切割技术、线切割机床正在各行各业中得到广泛的应用。
因此研究和设计数控线切割有很强的现实意义。
微机控制技术正在发挥出巨大的优越性。
(一)设计任务:设计一个数控X-Y工作台及其控制系统,该工作台可安装在铣床上,用于铣削加工.设计参数如下:最在铣削直径: 20mm最在铣削宽度: 8 mm最大铣削深度: 5 mm加工材料:碳钢工作台加工范围: X=250,Y=180最大移动速度: 3 m/min(二)总体方案的确定数控X—Y工作台的总体方案设计应考虑以下几点:1.工作台应具有沿纵向和横向往复运动、暂停等功能,因此数控控制系统采用连续控制系统。
安装fsx平台安装过程流程
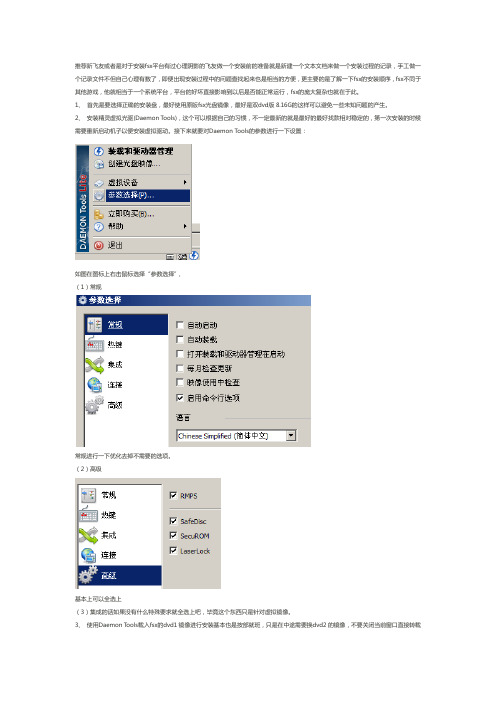
如图在图标上右击鼠标选择“参数选择” , (1)常规
常规进行一下优化去掉不需要的选项。 (2)高级
基本上可以全选上 (3)集成的话如果没有什么特殊要求就全选上吧,毕竟这个东西只是针对虚拟镜像。 3、 使用DaemonTools载入fsx的dvd1 镜像进行安装基本也是按部就班,只是在中途需要换dvd2 的镜像,不要关闭当前窗口直接转载
如图在地景库中添加中国 70 米地景然后退出fsx等下次再进入的时候fsx会自动加载地景的,我们暂且不管接着安装剩下的东西。 10、接下来安装机场包,注意在安装机场包的时候必须确定你安装过中国 70 米地形或者GLOBAL2008 全球地形,我使用的机场包是中 国机场国际版 V3.0bate1 公测版。 11、接下来就是比较关键的一个插件fsuipc,这个东西其实就是个插件接口程序,所有在fsx中使用的插件基本上都要fsuipc的支持才可 以正常使用,所以这个东西必须要装在所有插件之前才可以否则会出现各种各样的未知问题及插件不正常的问题,对于fsx我就选择安装 4.0 版以上的fsuipc。最好选择安装版的fsuipc这样他的问题就可以最小化。关于注册问题,我的使用经验是最好注册了,虽然说不注册 也能用但是有些小问题都是由于没有注册引起的。 12、安装DBSWalkandFollowFSX视角插件或者是EZdo_Camera_V1_15 视角插件,在fsx或是fs9 中最好装一个第三方的视角插件, 虽然fsx默认的视角就做的不错了,但是总有些不如人意的地方,这就需要通过第三方视角插件来弥补了,以上 2 个视角插件都是不错的 东西值得推荐,至于能否共融我没有试验过不好说,因为我也是刚刚才接触EZdo_Camera,他们的安装都不是特别麻烦,DBS安装的时 候有些特别,我整理了一下: (1、安装解压包内Dbs.waf.exe ,选择安装路径在FSX的根目录即可。 2 、 双 击 dbs.walk.and.follow.for.fsx.(cracked.by.komu)-patch.exe 解 压 破 解 补 丁 , 点 击 Patch 后 出 现 两 个 文 件 , dbs.waf.dll 和 Dbs.waf.key这两文件即是破解所需的补丁,把他们保存在磁盘任何位置,比如桌面。进入fsx游戏后正常退出 3、接下来打开C:\DocumentsandSettings\计算机用户名\LocalSettings\ApplicationData\DBSStudio文件夹,把刚才保存在桌面 的两个补丁,复制并覆盖进该文件夹内。 (注:如果不进入一次游戏这个文件夹就不会出现)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 1 章 使用之前注意事项 .............................................................................................................11
1.1
开箱注意事项 ................................................................................................................................. 11
关于操作人员的安全事项
平台的安全管理人员以及从事设置、操作和维护人员要注意安全,保障自己和他人的安全。
为防止发生危险,请严格遵守以下着装要求: 1. 着装工整; 2. 内衣、衬衣、领带等不要从实验服中露出; 3. 建议使用手套等安全装备。 请务必遵守现场张贴的“严禁烟火”,“高电压”,“危险”等警示标识所表示的事项。 有可能发生火灾、触电和人身伤害等事故。 与平台本体、电控箱磕碰,可能发生设备损坏和人身伤害。
快速安装与使用指导
GXY Serial XY 平台
2007-11
GXY 系列 快速安装与使用
版权声明
固高科技有限公司版权所有。 固高科技保留所有版权以及相关的知识产权。 在版权法保护下,在没有固高科技的书面许可下,任何人都不能直接的或是间接的复制、生产、加工 本产品以及附属产品。
声明
固高科技保留在没有预先通知的情况下修改产品或其特性的权利。 固高科技并不承担由于使用产品不当而产生的直接或是间接的伤害或损坏的责任。
型号定义 ........................................................................................................................................... 8
GXY系列通用XY平台产品型号列表 ............................................................................................. 8
商标
Windows和Microsoft是Microsoft的注册商标。 IPM和 IPM Motion Studio是Technosoft 公司的商标。 MATLAB是 MathWorks公司的商标。
联系我们
总部 固高科技(香港)有限公司
香港九龍清水灣香港科技大學新翼大樓 3639 號 Room 3639, Annex Building, HKUST, Clear Water Bay, Kowloon, Hong Kong Tel.: (852) 2358 1033, (852) 2719 8310 Fax: (852) 2719 8399 .
通用XY平台系列使用说明书列表.................................................................................................. 3 关于操作人员的安全事项 ............................................................................................................... 3 转交本设备时的注意事项 ............................................................................................................... 4 目 录 ...................................................................................................................................................5
本手册记述了安全上一般应该注意的事项,在实际实验环境下用于实验研究 人员的安全措施不可能完全记载,敬请原谅。 为了安全的使用本平台,用户必须按照本手册的要求对设备操作及维护人员 进行安全教育,直接操作人员必须认真阅平台所有说明书。 本手册中的图片及相片,为代表性实例,和实际产品可能有所不同; 由于破损或丢失而需要定购说明书,请与我公司销售部门联系; 客户自行进行产品改造产生的不良后果,不在本公司保修范围之内,本公司 概不负责。
固高科技(深圳)有限公司
深圳巿南山区高新科技园深港产学研基地西二楼 2/F, West Wing, IER Building, High-Tech Park Nanshan, Shenzhen, China Tel: (86) 755 2697 0817; (86) 755 2697 0835 Fax: (86) 755 2697 0846
1.2
安放场所要求 ................................................................................................................................. 11
1.3
搬运注意事项 ................................................................................................................................. 12
第 2 章 系统概述 ...........................................................................................................................13
2.1
简介 ................................................................................................................................................. 13
4
All rights reserved
GXY 系列 快速安装与使用
目录
版权声明 ........................................................................................................................................................... 1 声明 ................................................................................................................................................................... 1 商标 ................................................................................................................................................................... 1 联系我们 ........................................................................................................................................................... 1 关于本书 ........................................................................................................................................................... 2 关于安全 ...............................................................................................................Байду номын сангаас........................................... 3
非实验人员不得触摸控制计算机和电控箱按钮。 否则,有可能造成平台错误运动,引起人身伤害或设备损坏。
转交本设备时的注意事项
移动、转交本平台时,务必连同相关的说明书交到最终使用者手中。 平台说明书列表请查看本章第一节内容(通用 XY 平台系列使用说明书列表),说明书 丢失时,请与本公司销售部门联系。
© Googol 2007
表 0-1 警告标志
不正确的操作将会导致重大人身事故。
不正确的操作会导致设备损坏。
必须要做的操作。
被禁止的操作。
另外,即使“注意”所记载的内容,也可能因为不同的情况产生严重后果,因此任何一条注意事项都 很重要,在设备使用过程中请严格遵守。
虽然不符合“危险”“注意”的内容,但是用户在使用过程中必须严格遵守的事项,在相关地方以标 识。
© Googol 2007
3
All rights reserved
GXY 系列 快速安装与使用
在平台周围避免危险行为。 与倒立摆以及周边设备接触,有可能发生人身伤害行为。 不要强迫移动倒立摆,更不要倚靠在倒立摆本体上。 否则,会有受伤或设备损坏的可能。 请不要蹲坐在平台电控箱上,不要随意按开关按钮。 否则,有可能造成平台错误运动,引起人身伤害或设备损坏。