FANUC机器人程序实例:走轨迹
FANUC机器人程序实例:走轨迹.doc

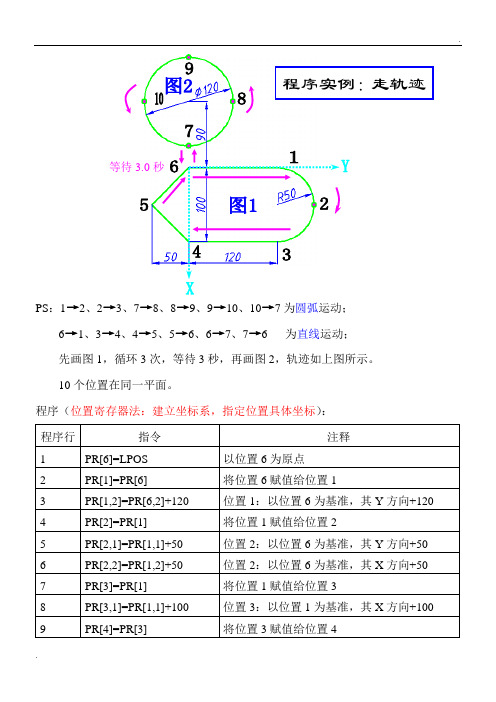
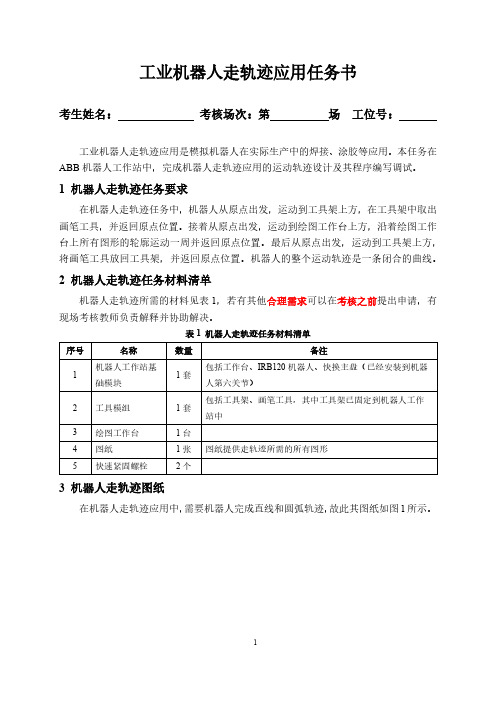
程序实例: 走轨迹等待秒PS :1→ 2、2→3、7→8、8→ 9、9→ 10、 10→7 为圆弧运动;6 → 1、3→4、4→5、5→ 6、6→ 7、7→ 6 为直线运动;先画图1,循环 3 次,等待 3 秒,再画图 2,轨迹如上图所示。
10 个位置在同一平面。
程序( 位置寄存器法:建立坐标系,指定位置具体坐标): 程序行指令 注释 1PR[6]=LPOS 以位置 6 为原点 2PR[1]=PR[6] 将位置 6 赋值给位置 1 3PR[1,2]=PR[6,2]+120 位置 1:以位置 6 为基准,其 Y 方向 +120 4PR[2]=PR[1] 将位置 1 赋值给位置 2 5PR[2,1]=PR[1,1]+50 位置 2:以位置 6 为基准,其 Y 方向 +50 6PR[2,2]=PR[1,2]+50 位置 2:以位置 6 为基准,其 X 方向 +50 7PR[3]=PR[1] 将位置 1 赋值给位置 3 8PR[3,1]=PR[1,1]+100 位置 3:以位置 1 为基准,其 X 方向 +100 9PR[4]=PR[3] 将位置 3 赋值给位置 4 10PR[4,2]=PR[3,2] -120 位置 4:以位置 3 为基准,其 Y 方向 -120 11PR[5]=PR[2] 将位置 2 赋值给位置 512 PR[5,2]=PR[2,2] -220 位置 5:以位置 2 为基准,其 Y方向-22013 PR[6]=PR[1] 将位置 1 赋值给位置 614 PR[6,2]=PR[1,2] -120 位置 6:以位置 1 为基准,其 Y方向-12015 R[1]=0 程序 1 初始值为 016 LBL[1] 程序 1 分支标签17 L PR[6] 2000mm/secFINE 从其它位置以 2000 mm/sec 直线运动到位置 618 L PR[1] 2000mm/secFINE 从位置 6 以 2000 mm/sec 直线运动到位置 1C PR[2] 从位置 1,经过位置 2 以 2000mm/sec19PR[3]2000mm/sec FINE 圆弧运动到位置 320 L PR[4] 2000mm/secFINE 从位置 3 以 2000 mm/sec 直线运动到位置 421 L PR[5] 2000mm/secFINE 从位置 4 以 2000 mm/sec 直线运动到位置 522 L PR[6] 2000mm/secFINE 从位置 5 以 2000 mm/sec 直线运动到位置 623 R[1]= R[1]+1 每循环一次, R[1] 值加 124 IF R[1]<3 JMP LBL[1] 如果 R[1]<3 ,程序跳转到 16 LBL[1] 执行25 WAIT 在位置 6 等待秒26 PR[7]=PR[6] 将位置 6 赋值给位置 727 PR[7,1]=PR[6,1] -30 位置 7:以位置 6 为基准,其 X方向- 3028 PR[8]=PR[6] 将位置 6 赋值给位置 8PR[8,1]=PR[6,1] -90 位置 8:以位置 6 为基准,其 X方向- 9029PR[8,2]=PR[6,2]+60 位置 8:以位置 6 为基准,其 Y方向 + 6030 PR[9]=PR[6] 将位置 6 赋值给位置 931 PR[9,1]=PR[6,1] -150 位置 9:以位置 6 为基准,其 X方向- 15032 PR[10]=PR[6] 将位置 6 赋值给位置 10PR[10,1]=PR[6,1] -90 位置 10:以位置 6 为基准,其 X 方向- 9033PR[10,2]=PR[6,2] -60 位置 10:以位置 6 为基准,其 Y 方向- 6034 PR[7]=PR[6] 将位置 6 赋值给位置 735 PR[7,1]=PR[6,1] -30 位置 7:以位置 6 为基准,其 X方向- 3036 PR[6]=PR[7] 将位置 7 赋值给位置 637 PR[6,1]=PR[7,1]+30 位置 6:以位置 7 为基准,其 X方向 +3038 L PR[6] 2000mm/secFINE 从其它位置以 2000 mm/sec 直线运动到位置 639 L PR[7] 2000mm/secFINE 从位置 6 以 2000 mm/sec 直线运动到位置 7C PR[8] 从位置 7,经过位置 8 以 2000mm/sec40PR[9]2000mm/sec FINE 圆弧运动到位置 9C PR[10] 从位置 9,经过位置 10 以 2000mm/sec41PR[7]2000mm/sec FINE 圆弧运动到位置 742 L PR[6] 2000mm/secFINE 从位置 7 以 2000 mm/sec 直线运动到位置 6 [END] 程序运行结束Call test1 :调用程序 test1。
工业机器人离线编程与仿真(基于KUKA) 直线轨迹的编程与操作

任务实施
视频:直线轨迹的编程与操作
主题讨论
讨论问题
FANUC机器人L指令用在哪些场合?
小结
我们要知道机器人L指令的参数和格式等知识,使我们更 了解FANUC机器人操作的相关知识。 学会了FANUC机器人直线轨迹的编程与操作后,为我们 接下来圆弧轨迹的编程与操作奠定了基础。
谢谢观看
工业机器人技术
任务二
项目八 程序的建立及基本运动指令的使用
直线轨迹的编程与操作
导入
如何实现FANUC机器人精确定位呢?
目录
学习目标
知识准备
任务实施
主题讨论
学习目标
学ቤተ መጻሕፍቲ ባይዱ目标
1 知道FANUC机器人L指令的含义
知识目标
2 知道定义FANUC机器人L指令的参数、格 式
3 会使用L指令移动机器人
学习重点
会L直线轨迹程序的编制方法
知识准备
一、运动指令L
线性运动即机器人的TCP从起点到终点之间的路径始终保持为直线。一般如焊接、涂胶等对路 径精度要求高的应用使用此指令。
知识准备
二、L指令参数解析
L指令的引用方式: L P【i】 mm/sec CNTi
参数 P【i】 mm/sec CNTi
含义 目标点位置数据 运动速度数据 终止类型
fanuc发那科 机器人编程手册
fanuc发那科机器人编程手册Fanuc发那科机器人编程手册一、简介Fanuc发那科是世界上领先的机器人制造商之一,其机器人在工业自动化领域有着广泛的应用。
Fanuc发那科机器人编程手册是操作Fanuc发那科机器人的重要工具,通过该手册,用户可以学习机器人编程的基础知识和技巧,掌握机器人的操作方法和编程语言,实现对机器人的灵活控制。
二、机器人编程基础知识1. 机器人的结构和组成:Fanuc发那科机器人由机械臂、控制器、传感器、执行器等多个部件组成,每个部件都有特定的功能和作用。
2. 坐标系和运动控制:机器人的坐标系是确定机器人运动和定位的基础,掌握坐标系的概念和使用方法是进行机器人编程的前提。
3. 程序结构和语法:机器人编程语言包括RSL(Robot Script Language)和KAREL(Fanuc发那科控制器语言),熟悉编程语言的结构和语法可以更好地编写机器人程序。
三、机器人编程技巧1. 运动指令的使用:机器人的运动指令包括直线运动、圆弧运动、旋转运动等,选择合适的运动指令可以实现不同的操作需求。
2. 传感器的应用:机器人的传感器可以提供环境信息和物体检测等功能,合理应用传感器可以增加机器人的灵活性和安全性。
3. 条件判断和循环控制:机器人程序中常常需要进行条件判断和循环控制,熟练掌握条件判断和循环控制的语法和用法可以提高程序的效率和可读性。
四、实例操作和案例分析Fanuc发那科机器人编程手册中通常会包含一些实例操作和案例分析,通过对实际案例的分析和操作,用户可以更好地理解机器人编程的应用和技巧。
1. 实例操作:手册中会提供一些具体的机器人操作场景,例如机器人的物料搬运、焊接、涂装等,用户可以按照手册中的操作步骤进行实践。
2. 案例分析:手册中会提供一些机器人编程案例的分析和解决方法,用户可以通过分析案例来学习问题解决的思路和方法。
五、常见问题和故障排除Fanuc发那科机器人编程手册中还会包含一些常见问题和故障排除的方法和技巧,这对用户在实际应用中遇到问题时进行自我排除和解决非常有帮助。
发那科机器人编程实例及解释
发那科机器人编程实例及解释发那科机器人是一种广泛应用于工业领域的机器人系统,其编程复杂且需要具备较高的技术水平。
本文将介绍发那科机器人编程的多个实例,并对这些实例进行详细的解释和分析。
一、发那科机器人编程的基础知识在开始编写发那科机器人程序之前,需要掌握一些基础知识。
首先,需要了解发那科机器人的指令系统和编程语言。
发那科机器人的指令系统是基于日本发那科公司的 APT(Advanced Process Technology) 系统的,其编程语言主要包括 ST 语言和 PLC 语言。
ST 语言是一种面向对象的语言,主要用于对机器人进行控制和编程。
ST 语言的语法较为复杂,需要掌握其基本语法和常用函数。
PLC 语言则是一种基于逻辑运算的语言,主要用于对机器人进行逻辑控制和程序编写。
PLC 语言的语法相对简单,主要掌握其基本语法和常用函数。
二、发那科机器人编程的实例1. 机器人路径规划机器人路径规划是机器人编程中最常见的任务之一。
在该任务中,需要根据机器人的当前位置和目标位置,计算出机器人的运动轨迹,并将其存储到机器人的内存中。
示例代码:// 定义机器人内存RAM100 = 20;RAM200 = 30;// 定义运动轨迹line RAM100, RAM200;line RAM100, -RAM200;line -RAM100, RAM200;line -RAM100, -RAM200;// 将轨迹存储到机器人内存中RAM100 = RAM100 + cos(angle)*RAM200;RAM200 = RAM200 + sin(angle)*RAM100;2. 机器人自适应控制机器人自适应控制是一种通过调整机器人的控制参数来实现机器人自适应控制的方法。
在该任务中,需要根据机器人的当前状态和目标状态,计算出机器人的控制参数,并将其存储到机器人的内存中。
示例代码:// 定义机器人控制参数Kp = 0.1;Ki = 0.01;Kd = 0.01;// 定义机器人状态state = 0;// 计算机器人控制参数delta_t = time - last_time;if (delta_t > 0) {Kp = Kp + delta_t*Ki;Ki = Ki + delta_t*Kd;Kd = Kd + delta_t*Kp;}// 将控制参数存储到机器人内存中last_time = time;Kp = Kp + delta_t*Ki;Ki = Ki + delta_t*Kd;Kd = Kd + delta_t*Kp;3. 机器人人机交互机器人人机交互是一种通过人类界面与机器人进行交互的方法。
FANUC发那科工业机器人G76代码使用方法及程序例

FANUC发那科工业G76代码使用方法及程序例一、G76代码简介G76代码是FANUC发那科工业中的一种功能强大的编程指令,主要用于实现末端的精确钻孔操作。
通过合理运用G76代码,可以大大提高生产效率,保证钻孔精度。
下面将详细介绍G76代码的使用方法及程序例。
二、G76代码使用方法1. 确认型号及配置在使用G76代码前,请确保您的FANUC发那科工业型号支持该功能,并且已正确配置相关硬件设备,如钻孔工具、控制器等。
2. 编写G76代码程序O1000;(程序编号)G90 G54;(设置绝对坐标系,选择工件坐标系)G43 H1;(启用工具长度补偿)G76 P1 Q1 R1;(设置钻孔参数)G0 X100 Y100;(移动到钻孔起点)G76 X100 Y100 Z50 R1;(执行钻孔操作)G80;(取消循环)M30;(程序结束)3. G76代码参数说明P:孔径补偿值,单位为mm。
Q:每次进给深度,单位为mm。
R:退刀安全高度,单位为mm。
4. 执行G76代码程序三、G76代码程序实例O2000;(程序编号)G90 G54;(设置绝对坐标系,选择工件坐标系)G43 H1;(启用工具长度补偿)G76 P10 Q5 R10;(设置钻孔参数,孔径补偿10mm,每次进给5mm,退刀安全高度10mm)G0 X100 Y100;(移动到钻孔起点)G76 X100 Y100 Z20 R10;(执行钻孔操作,孔深20mm)G80;(取消循环)M30;(程序结束)四、G76代码注意事项1. 钻孔前检查在执行G76代码前,务必检查工具是否安装正确,工件是否固定牢固,以及钻孔路径是否畅通无阻。
2. 参数调整根据实际钻孔需求,合理调整P、Q、R参数。
过大的孔径补偿会导致工具与工件接触不良,而过小的退刀安全高度则可能引起撞刀事故。
3. 安全监控在程序运行过程中,操作人员应密切关注的运行状态,如有异常立即暂停程序,排查问题。
五、G76代码在实际应用中的技巧1. 多孔加工若需要在工件上连续钻多个孔,可以复制G76代码段,并修改相应的坐标值,以实现快速编程。
Fanuc机器人控制器及编程

圆弧焊接编程
1. JP[1] 100% FINE 2. JP[2] 100% FINE 3. LP[3] 500mm/sec FINE Arc Start[1] 4. CP[4] P[5]100mm/sec FINE 5. CP[6] P[7] 100mm/sec FINE Arc End[1] 6. JP[8] 100% FINE 7. Call SafeHome Point Arcstart Weld_ PT Arcend Touch Up > F1 F2 F3 F4 F5
100fine自己定义p工具坐标系原点tcp机器人的三种运动轨迹及表示方法点对点运动jointcirclec上海林肯电气自动?精确到位fine?圆滑过渡cntrobotprogrammovementendtypes机器人编程运动结束方式典型焊接程序的编写edit直线焊接的编程100fine100cnt100lp3100mmsecfinef1f2f3f4f5圆弧焊接编程jp1100finejp2100finelp3500mmsecfinearcstart1cp4f1f2f3f4f5编程时常用的中高级指令及功edcmdf5insertdeletecopypasteundoinstf1programcontrolarcstartendtimerwaitweavingifjmpprroffsetdodiedcmdjp1100finejp2100finelp3100fineinsertdeletecopypastef1f5instjp1100finejp2100finearcstart1programcontrol22
• 工具坐标系原点( TCP)
机器人的
三种运动轨迹及表示方法
• 点对点运动(Joint--- J)
fanuc机器人指令讲解【附图】

程序编辑界面,在编辑(EDCMD)中有一系列的功能选项,本文重点对“变更编号”、“取消”及“改为备注”三个功能做详细介绍。
1.变更编号(Renumber)该选项的功能作用是:以升序方式,从光标所在行起,自上而下赋予程序中位置变量新的位置编号,使程序中的位置编号更加整齐。
图1示教编程中,由于经常需要对示教位置点执行插入或删除操作,位置编号在程序中会变得零乱无序(如图2)。
图2通过变更编号功能,可使位置编号在程序中依序排列(如图3)。
图3注意:1、变更编号功能仅对编号顺序进行调整,不改变原程序轨迹。
2、变更编号功能只对位置变量P[i]有效,对位置寄存器PR[i]无效。
具体操作步骤:将光标移至程序首行后①选择F5编辑命令;②选择“变更编号”选项;③选择F4“是”(如图4、图5所示)。
图4备注:由于行1与行6中位置变量相同,都为P[1]。
所以,变更编号后两者编号保持一致。
图52.取消(Undo)该选项的功能作用是:可以撤销指令的更改、行插入、行删除等程序编辑操作。
注意:该功能只能撤销上一步操作,不能撤销多次操作。
下文以行删除为例对该功能进行说明。
原程序如图6所示:图6在原程序中删除1-3行后,程序如图7所示:图7通过使用取消(Undo)功能,能够撤销删除操作,恢复已删除行。
具体操作步骤:①选择F5编辑命令;②选择“取消”;③选择F4“是”(如图8、图9所示)。
图8图9取消后,程序如图10所示。
图103.改为备注(Remark)该选项的功能作用是:通过将程序中的单行或多行指令改为备注,可以在程序运行中不执行该指令。
原程序如图11,图11该程序对应机器人轨迹如图12,图12将原程序2-4行改为备注后,在行的开头会显示“//”。
改为备注的指令在程序运行中相当于被屏蔽,不会被执行。
将2-4行改为备注后,程序如图13,图13改为备注后的程序执行效果如图14,行2至行4指令内容保留,但不被执行。
图14具体操作步骤:①将光标移至需要改为备注的行号位置;②选择F5编辑命令;③选择“改为备注”选项(如图15);④根据提示,下移光标选中目标对象;⑤选择F4“改为备注”(如图16)。
FANUC机器人程序实例:走轨迹
38
L PR[6]2000mm/sec FINE
从其它位置以2000 mm/sec直线运动到位置6
39
L PR[7]2000mm/sec FINE
从位置6以2000 mm/sec直线运动到位置7
40
C PR[8]
从位置7,经过位置8以2000mm/sec
PR[9]2000mm/sec FINE
PS:1→2、2→3、7→8、8→9、9→10、10→7为圆弧运动;
6→1、3→4、4→5、5→6、6→7、7→6为直线运动;
先画图1,循环3次,等待3秒,再画图2,轨迹如上图所示。
10个位置在同一平面。
程序(位置寄存器法:建立坐标系,指定位置具体坐标):
程序行
指令
注释
1
PR[6]=LPOS
以位置6为原点
7
PR[3]=PR[1]
将位置1赋值给位置3
8
PR[3,1]=PR[1,1]+100
位置3:以位置1为基准,其X方向+100
9
PR[4]=PR[3]
将位置3赋值给位置4
10
PR[4,2]=PR[3,2]-120
位置4:以位置3为基准,其Y方向-120
11
PR[5]=PR[2]
将位置2赋值给位置5
12
2
PR[1]=PR[6]
将位置6赋值给位置1
3
PR[1,2]=PR[6,2]+120
位置1:以位置6为基准,其Y方向+120
4
PR[2]=PR[1]
将位置1赋值给位置2
5
PR[2,1]=PR[1,1]+50
FANUC机器人示教技术干扰和如何调试轨迹
– 工件面垂直示教轻易
• Cycle time缩短
– 多出旳点不需要
一般旳TCP: handling work回转动作时, 必须有中间点
Remote TCP: 虽然无中间点,也可回转
FA & ROBOT
干涉互锁旳选用措施
A 机器人
a
31
2
b
54
6
B 机器人
• 干涉外信号
– 干涉外信号是指机器人在干涉 区域以外,运动不受任何限制 时所发出旳信号,所以有必要 在领域内选用
– J4轴回转旳话,电缆回转 可能比较困难.
– 在此情况下,使用各轴 (JOINT)JOG来操作机器人 ,调整机器人姿势
– 程序上用各轴运动(J)指 令
FA & ROBOT
直线
移动最短距离
示教位置 (J6=70°) 状态:NUT,0,0,0
基本注意事项
• 使用补正命令示教点旳动作命令 为直线
– 为何?
FA & ROBOT
2 1
打点及接近点旳示教
–基准示教打点
• 首先示教打点位置
3
• 其次、示教接近点、脱离
点
5 6
• 接近点/打点/脱离点以 同姿势示教
–姿势变化造成旳cycle time挥霍旳降低
4
注:点2和3,5和6可能相同
FA & ROBOT
Air cut时间旳缩短
CNT100
–[CNT]及[FINE]旳使用场 合区别
操作8
• 危险旳主程序
– 左图旳主程序危险.
什么原因?
• 程序旳基本
– 应该[迈进]和[后退]都能 够.
1:直线位置[2] 500mm/sec 位置决定 ; 2:直线位置[3] 500mm/sec 位置决定 ; 3:直线位置[4] 500mm/sec 位置决定 ; 4:直线位置[5] 500mm/sec 位置决定 ; 5:程序终了 ;
FANUC机器人程序实例:走轨迹

FANUC程序实例:走轨迹FANUC程序实例:走轨迹1、背景介绍1.1、概述本文档旨在提供一个基于FANUC的程序实例,展示如何使用走轨迹的方法和技巧。
1.2、目的通过本文档,读者将学习到在FANUC上编写程序进行轨迹运动的基本知识和技能。
2、程序编写准备2.1、硬件准备需要准备一台FANUC和必要的传感器设备。
2.2、软件准备安装FANUC控制系统的编程软件,并熟悉基本的操作和语法。
3、程序架构设计3.1、程序结构概览介绍整个程序的结构和主要组成部分。
3.2、程序流程图展示整个程序的流程图,方便读者理解程序执行的顺序和逻辑。
4、运动规划4.1、路径规划讲解如何在FANUC中设定轨迹规划点,以及如何根据不同的运动需求进行路径规划。
4.2、运动规划介绍如何在程序中设定的运动轨迹,并选择合适的运动控制方式。
5、运动控制5.1、关节运动控制讲解如何在程序中对的关节进行控制,实现精确的位置控制和角度控制。
5.2、直线运动控制介绍如何在程序中对进行直线运动控制,实现指定方向和速度的运动。
6、检测与调试6.1、传感器数据获取讲解如何使用传感器设备获取的反馈信息,并进行实时监测。
6.2、运动调试介绍如何通过调试工具对程序进行测试和调试,确保程序的正确性和可靠性。
7、附件7.1、附件一、程序示例代码提供一份完整的示例程序代码,供读者参考和学习。
7.2、附件二、FANUC控制系统文档提供FANUC控制系统的详细文档,包括安装、操作和编程等方面的内容。
8、法律名词及注释8.1、法律名词一、注释一。
9、结束语本文档提供了一个FANUC程序实例,展示了如何使用走轨迹的方法和技巧。
通过学习本文档,读者将能够掌握在FANUC上编写程序进行轨迹运动的基本知识和技能。
【中文】10-1机器人动作说明(FANUC)

包含输入输出信号的程序
机器人
DO[101] DO[103] DI[105]
线控制装置
作业中 传送带驱动 工件有无确认
样品2
1 : J P[1] 100% FINE 2 : DO [101] = ON 3 : J P[2] 70% FINE 4 : WAIT DI[105] = ON TIMEOUT,LBL [1] 5 : JMP LBL [2] 6 : LBL [1] 7 : END 8 : LBL [2] 9 : L P[3] 1000cm/min CNT50 10 : L P[4] 500mm/sec FINE 11 : DO [103] = ON 12 : J P[1] 100% FINE 13 : DO [101] = OFF 14 : DO [103] = OFF [END]
包含出入输出信号的程序
③ P[3]
② P[2]
DI[105]=ON (工件有无确认)
DO[103]=OFNF (传送带驱动)
④ P[4]
现在位置
DO[101]=ONFF
① P[1] (作业中)
样品2
※位置[2]的要点DI[105](工件有无确认)打开模式
1 : J P[1] 100% FINE 2 : DO [101] = ON 3 : J P[2] 70% FINE 4 : IF DI[105] = OFF,JMP LBL [1]
动作形式和定位形式
各轴
P[2] 目标点
各轴动作
P[1] 开始点
例) 1:J P[1] 100% FINE 2:J P[2] 70% FINE
动作形式和定位形式
直线
P[2] 目标点
直线动作
P[1] 开始点
工业机器人走轨迹任务书
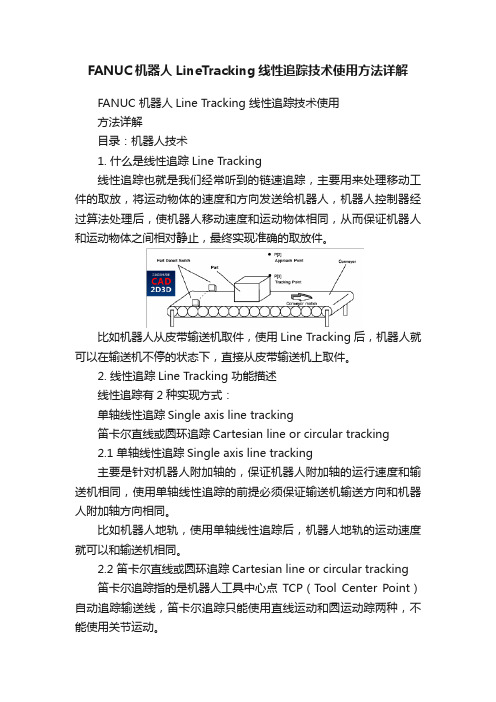
工业机器人走轨迹应用任务书考生姓名:考核场次:第场工位号:工业机器人走轨迹应用是模拟机器人在实际生产中的焊接、涂胶等应用。
本任务在ABB机器人工作站中,完成机器人走轨迹应用的运动轨迹设计及其程序编写调试。
1 机器人走轨迹任务要求在机器人走轨迹任务中,机器人从原点出发,运动到工具架上方,在工具架中取出画笔工具,并返回原点位置。
接着从原点出发,运动到绘图工作台上方,沿着绘图工作台上所有图形的轮廓运动一周并返回原点位置。
最后从原点出发,运动到工具架上方,将画笔工具放回工具架,并返回原点位置。
机器人的整个运动轨迹是一条闭合的曲线。
2 机器人走轨迹任务材料清单机器人走轨迹所需的材料见表1,若有其他合理需求可以在考核之前提出申请,有现场考核教师负责解释并协助解决。
表1 机器人走轨迹任务材料清单3 机器人走轨迹图纸在机器人走轨迹应用中,需要机器人完成直线和圆弧轨迹,故此其图纸如图1所示。
图1 轨迹图纸4 任务的实施根据任务要求,检查所需材料清单,若有疑问请及时反馈,一旦考核开始,此类为题不再提供技术支持;2.根据任务要求,对工作站的各部件进行布局并固定;3.分析任务,绘制机器人走轨迹程序流程图;4.根据任务需要,创建机器人工具数据,并应用在机器人走轨迹程序的恰当位置;5.根据任务需要,创建机器人工件数据,并应用在机器人走轨迹程序的恰当位置;6.根据任务要求,设计机器人走轨迹程序,并对其进行调试;7.根据任务要求,机器人走轨迹过程能够自动完成,无需人为干预。
5 成绩评定标准任务需要在30分钟之内完成;2.机器人在自动运行模式下能够顺利实施整个工作流程,为满分(100分);3.若在自动运行模式下,出现故障,机器人无法正常运行,需要人为干预,则要求如下:(1)第1次干预的时间不超过1分钟,干预此次扣5分;(2)第2次干预的时间不超过1分钟,干预此次扣15分;(3)第3次干预的时间不超过1分钟,干预此次扣25分。
4.若在规定时间内没有完成全部任务,机器人无法自动运行,则按照表2进行评定。
FANUC机器人程序实例:走轨迹
PR[8,2]=PR[6,2]+60
位置8:以位置6为基准,其Y方向+ 60
30
PR[9]=PR[6]
将位置6赋值给位置9
31
PR[9,1]=PR[6,1]-150
位置9:以位置6为基准,其X方向-150
32
PR[10]=PR[6]
将位置6赋值给位置10
33
PR[10,1]=PR[6,1]-90
2
PR[1]=PR[6]
将位置6赋值给位置1
3
PR[1,2]=PR[6,2]+120
位置1:以位置6为基准,其Y方向+120
4
PR[2]=PR[1]
将位置1赋值给位置2
5
PR[2,1]=PR[1,1]+50
位置2:以位置6为基准,其Y方向+50
6
PR[2,2]=PR[1,2]+50
位置2:以位置6为基准,其X方向+50
位置10:以位置6为基准,其X方向-90
PR[10,2]=PR[6,2]-60
位置10:以位置6为基准,其Y方向-60
34
PR[7]=PR[6]
将位置6赋值给位置7
35
36
PR[7,1]=PR[6,1]-30
位置7:以位置6为基准,其X方向-30
36
PR[6]=PR[7]
将位置7赋值给位置6
37
PR[6,1]=PR[7,1]+30
如果R[1]<3,程序跳转到16 LBL[1]执行
25
WAIT 3.0sec
在位置6等待3.0秒
26
PR[7]=PR[6]
机器人运动轨迹指令通解及使用注意点

机器人运动轨迹指令通解及使用注意点机器人蓝图在现场调试机器人,有个同行疑问?为啥我调了半天的轨迹都做不出合格产品,你一来两分钟就搞定了呢?运动指令就那么简单的几个呀?你给我解释解释,是不是留后门了!我说,你还是技术没学到家,运动指令的确就那几个,但是你没有真正搞懂每个的真实用途!你的姿态引导和轨迹逼近都没有设置好!其实大部分刚开始搞机器人的朋友也都一样,认为运动指令简单,就是直线,关节,圆弧这些嘛!就没有花心思去细细研究它!今天我给大家伙详细普及下运动指令需要注意的几个问题!机器人运动指令原理都是一样的,常用的指令基本上就是这几个点:点到点;点到点指令,KUKA机器人叫PTP,ABB机器人叫MoveJ,发那科机器人叫J,史陶比尔机器人叫moveJ;每家名称不同,用法是一样的,大家看手册都会看到同样一句话,点到点指令的运动轨迹是不可预测的,这句话怎么理解?并不是说每次运行轨迹都不可预测,它的意思是你在编程之前,你是想不到从点1到点2轨迹是什么样子,所以需要手动慢速走一遍,走了之后你就知道轨迹是什么样了,再运行每次轨迹都是一样的!KUKAABB史陶比尔发那科直线;直线指令,KUKA机器人叫Line,ABB机器人叫MoveL,发那科机器人叫L,史陶比尔机器人叫movel;直线指令就是走直线,手册里说是TCP从起点匀速移动到目标点!这里的匀速也并不是绝对的,它有个加减速度在里面,所以启动和停止的瞬间,它不是匀速的,所以焊接或者涂胶要求精度很高的话,你得提前预判一个位置,或者加时间延时!还有三个点连续匀速,各家机器人走直线会走到一个精确点就停止,再走下一个点,这种情况我都是把轨迹逼近打开,你可以设置逼近数值为0,也可以设置一个其它数值,这时候就可以连续匀速运动了!直线指令还会遇到个最大的问题,那就是奇异点(我之前文章里详细讲过),如果直线指令经过奇异点是无法运动的,但是点到点就没有奇异点问题!KUKA发那科ABB史陶比尔圆弧;圆弧指令,三点确定一个圆弧,都一样,两个半圆构成一个圆;也有的机器人可以设置圆弧角度,圆的半径,这些参数;其它的使用和直线指令是一样的!速度;这里的速度不是全局速度,而是每条指令里的速度,各种型号的机器人每条指令里都有速度参数,有的更详细,会分为关节速度和直线速度,比如史陶比尔机器人就区分很详细,使用时候注意区分。
FANUC发那科[a]-L-4 程序设计
![FANUC发那科[a]-L-4 程序设计](https://img.taocdn.com/s3/m/b1abf1b831b765ce0408147e.png)
4.3 知识贮备
4.3.7 其他指令
1.跳转/标签指令 JMP/LBL (1)标签指令: LBL [ i : Comment ]
i : 1 to 32766 Comment : 注解(最多16个字符)
(2)跳转指令: JMP LBL [i] JMP LBL [i] i : 1 to 32766
4.3 知识贮备
4.3.2 运动指令
(5)附加运动语句 动作附加指令是在机器人动作中使其执行特定作业的指令,常用 的动作附加指令有: a) 腕关节运动:Wjnt b) 加速倍率:ACC c) 转跳标记:SKIP,LBL[i] d) 位置补偿指令:Offset e) 直接位置补偿指令:Offset,PR[i] f) 工具补偿指令:Toll_Offset g) 直接工具补偿指令:Toll_Offset,PR[i]
4.3 知识贮备
4.3.7 其他指令
5.偏置条件指令OFFSET 偏置条件指令OFFSET的形式。 OFFSET CONDITION PR[i] 其中,PR[i]:偏置点。 通过偏置条件指令OFFSET可以将原有的点偏置,偏置量由位置寄存器决定。偏置条 件指令只对包含附加运动OFFSET的运动语句有效。偏置条件指令一直有效到程序运行结 束或者下一个偏置条件指令执行为止。 例如: 1. OFFSET CONDITION PR[1] 2. J P[1] 100% FINE (偏移无效) 3. L P[2] 500mm/sec FINE offset (偏移有效) 但 1. L P[2] 500mm/sec FINE offset,PR[1] 也有效, 等同于 1.OFFSET CONDITION PR[1]
下向所指定的指令转移,接收到信号时,取消动作并执行下一个指令 h) 添加到程序上的注解 i) 其他指令
FANUC机器人LineTracking线性追踪技术使用方法详解
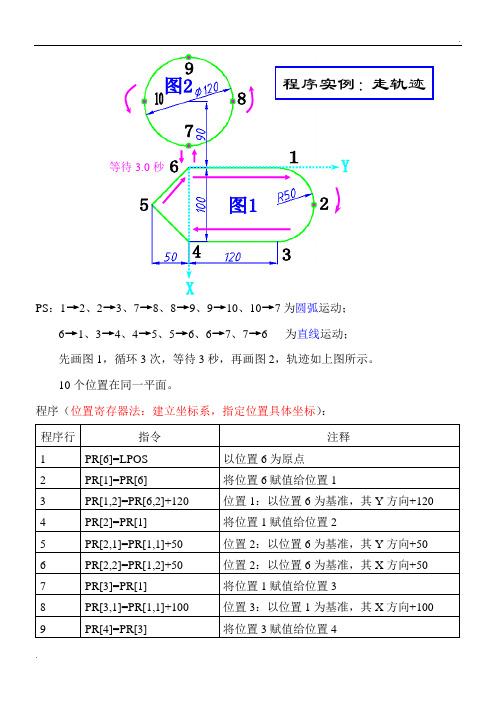
FANUC机器人LineTracking线性追踪技术使用方法详解FANUC 机器人Line Tracking 线性追踪技术使用方法详解目录:机器人技术1. 什么是线性追踪Line Tracking线性追踪也就是我们经常听到的链速追踪,主要用来处理移动工件的取放,将运动物体的速度和方向发送给机器人,机器人控制器经过算法处理后,使机器人移动速度和运动物体相同,从而保证机器人和运动物体之间相对静止,最终实现准确的取放件。
比如机器人从皮带输送机取件,使用Line Tracking后,机器人就可以在输送机不停的状态下,直接从皮带输送机上取件。
2. 线性追踪Line Tracking 功能描述线性追踪有2种实现方式:单轴线性追踪Single axis line tracking笛卡尔直线或圆环追踪Cartesian line or circular tracking2.1 单轴线性追踪Single axis line tracking主要是针对机器人附加轴的,保证机器人附加轴的运行速度和输送机相同,使用单轴线性追踪的前提必须保证输送机输送方向和机器人附加轴方向相同。
比如机器人地轨,使用单轴线性追踪后,机器人地轨的运动速度就可以和输送机相同。
2.2 笛卡尔直线或圆环追踪Cartesian line or circular tracking笛卡尔追踪指的是机器人工具中心点TCP(Tool Center Point)自动追踪输送线,笛卡尔追踪只能使用直线运动和圆运动踪两种,不能使用关节运动。
2.2.1 直线追踪笛卡尔直线追踪系统,一般由机器人、直线输送机组成,当工件从机器人前方经过时,机器人可以准确抓取工件。
2.2.2 圆弧追踪笛卡尔圆弧追踪系统,一般由机器人、圆弧形输送机或旋转工作台组成,直接可以直接从上面取放件。
圆弧追踪不支持边界设定。
3 硬件和软件线性追踪系统要求控制器带有线性追踪接口,可以连接输送机速度编码器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
程序实例:走轨迹等待3.0秒
PS:1→2、2→3、7→8、8→9、9→10、10→7为圆弧运动;
6→1、3→4、4→5、5→6、6→7、7→6 为直线运动;
先画图1,循环3次,等待3秒,再画图2,轨迹如上图所示。
10个位置在同一平面。
程序(位置寄存器法:建立坐标系,指定位置具体坐标):
程序行指令注释
1 PR[6]=LPOS 以位置6为原点
2 PR[1]=PR[6] 将位置6赋值给位置1
3 PR[1,2]=PR[6,2]+120 位置1:以位置6为基准,其Y方向+120
4 PR[2]=PR[1] 将位置1赋值给位置2
5 PR[2,1]=PR[1,1]+50 位置2:以位置6为基准,其Y方向+50
6 PR[2,2]=PR[1,2]+50 位置2:以位置6为基准,其X方向+50
7 PR[3]=PR[1] 将位置1赋值给位置3
8 PR[3,1]=PR[1,1]+100 位置3:以位置1为基准,其X方向+100
9 PR[4]=PR[3] 将位置3赋值给位置4
10 PR[4,2]=PR[3,2]-120 位置4:以位置3为基准,其Y方向-120
Call test1:调用程序test1。