bellman-ford算法与差分约束系统
算法导论(第三版)-复习-第六部分图论22-26[转]
![算法导论(第三版)-复习-第六部分图论22-26[转]](https://img.taocdn.com/s3/m/056830c148649b6648d7c1c708a1284ac85005ae.png)
算法导论(第三版)-复习-第六部分图论22-26[转]22习题22.1-5 有向图G(V, E)的平⽅图。
链表表⽰时,对每结点u的Adj[u]中所有v加⼊队列,后边出队边将Adj[v]加⼊Adj[u]中。
矩阵表⽰时,若w[i, j]、w[j, k]同时为1则将w[i, k]置1.习题22.1-6 O(V)的时间寻找通⽤汇点。
汇点的特征是邻接矩阵的第j列除[j, j]外所有元素为1. 可将每⾏调整[j ,j]后作为⼀个整数,所有整数与运算,为1的位是汇点。
习题22.1-7 有向⽆环图的关联矩阵B,BB’每个元素C[i, j]=∑B[i, k]*B’[k, j]=∑B[i, k]*B[j, k],即同时进i, j两结点与同时出i, j的结点总数-⼀进⼀出i, j两结点的结点总数。
习题22.2-7 类似BFS,d mod2为0则标为B(娃娃脸),d mod2为1则标为H(⾼跟鞋)。
但若有边连接相同类的结点,则⽆法划分。
wrestler(G){for each u in G{(u,v)=Adj[u];if(v.mark==u.mark){throw error;}if(v.d==NIL) {v.d=u.d+1; v.mark=v.d mod 2;}}}习题22.2-8 任意点之间的最短路径。
重复的Dijktra算法或Floyd-Warshall算法习题22.2-9 ⽆向图扩展为有向图。
问题变成要遍历所有边⼀次。
访问结点u时,将u的⼦结点v的其他边都可视为⼦集v,问题等价于u到v,访问v的集合,v到u。
u标为visiting⼊列,然后访问v,v标为visiting⼊列,然后访问v的后继结点,访问过的边标为visited,返回到visiting的点时,如果该点所有连接的边都标为visited只剩⼀条返回上级的边,则返回上级结点并将点标为visited,v出列,访问u的其他⼦结点,最终u出列。
全部结点出列后达到遍历所有边⼀次。
【转】彻底弄懂最短路径问题(图论)
【转】彻底弄懂最短路径问题(图论)P.S.根据个⼈需要,我删改了不少问题引⼊问题:从某顶点出发,沿图的边到达另⼀顶点所经过的路径中,各边上权值之和最⼩的⼀条路径——最短路径。
解决最短路的问题有以下算法,Dijkstra算法,Bellman-Ford算法,Floyd算法和SPFA算法,另外还有著名的启发式搜索算法A*,不过A*准备单独出⼀篇,其中Floyd算法可以求解任意两点间的最短路径的长度。
笔者认为任意⼀个最短路算法都是基于这样⼀个事实:从任意节点A到任意节点B的最短路径不外乎2种可能,1是直接从A到B,2是从A经过若⼲个节点到B。
⼀.Dijkstra算法该算法在《数据结构》课本⾥是以贪⼼的形式讲解的,不过在《运筹学》教材⾥被编排在动态规划章节,建议读者两篇都看看。
(1) 迪杰斯特拉(Dijkstra)算法按路径长度递增次序产⽣最短路径。
先把V分成两组:S:已求出最短路径的顶点的集合V-S=T:尚未确定最短路径的顶点集合将T中顶点按最短路径递增的次序加⼊到S中,依据:可以证明V0到T中顶点Vk的最短路径,或是从V0到Vk的直接路径的权值或是从V0经S中顶点到Vk的路径权值之和(反证法可证)。
(2) 求最短路径步骤1. 初使时令 S={V0},T={其余顶点},T中顶点对应的距离值,若存在<V0,Vi>,为<V0,Vi>弧上的权值(和SPFA初始化⽅式不同),若不存在<V0,Vi>,为Inf。
2. 从T中选取⼀个其距离值为最⼩的顶点W(贪⼼体现在此处),加⼊S(注意不是直接从S集合中选取,理解这个对于理解vis数组的作⽤⾄关重要),对T中顶点的距离值进⾏修改:若加进W作中间顶点,从V0到Vi的距离值⽐不加W的路径要短,则修改此距离值(上⾯两个并列for循环,使⽤最⼩点更新)。
3. 重复上述步骤,直到S中包含所有顶点,即S=V为⽌(说明最外层是除起点外的遍历)。
差分约束系统详解
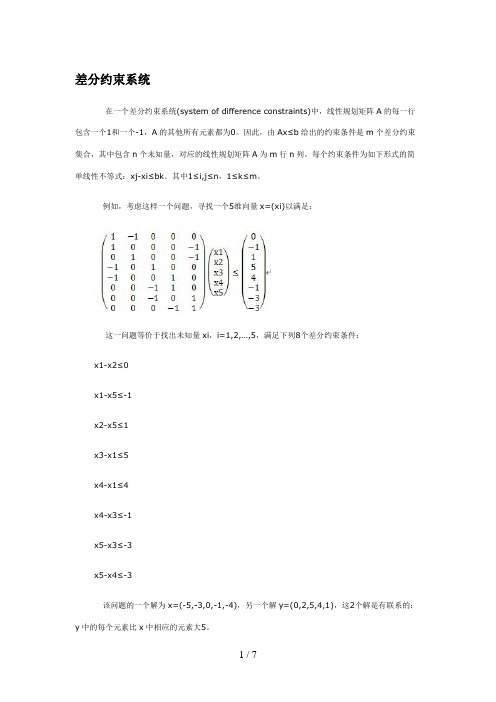
差分约束系统在一个差分约束系统(system of difference constraints)中,线性规划矩阵A的每一行包含一个1和一个-1,A的其他所有元素都为0。
因此,由Ax≤b给出的约束条件是m个差分约束集合,其中包含n个未知量,对应的线性规划矩阵A为m行n列。
每个约束条件为如下形式的简单线性不等式:xj-xi≤bk。
其中1≤i,j≤n,1≤k≤m。
例如,考虑这样一个问题,寻找一个5维向量x=(xi)以满足:这一问题等价于找出未知量xi,i=1,2,…,5,满足下列8个差分约束条件:x1-x2≤0x1-x5≤-1x2-x5≤1x3-x1≤5x4-x1≤4x4-x3≤-1x5-x3≤-3x5-x4≤-3该问题的一个解为x=(-5,-3,0,-1,-4),另一个解y=(0,2,5,4,1),这2个解是有联系的:y中的每个元素比x中相应的元素大5。
引理:设x=(x1,x2,…,xn)是差分约束系统Ax≤b的一个解,d为任意常数。
则x+d=(x1+d,x2+d,…,xn+d)也是该系统Ax≤b的一个解。
约束图在一个差分约束系统Ax≤b中,m X n的线性规划矩阵A可被看做是n顶点,m条边的图的关联矩阵。
对于i=1,2,…,n,图中的每一个顶点vi对应着n个未知量的一个xi。
图中的每个有向边对应着关于两个未知量的m个不等式中的一个。
给定一个差分约束系统Ax≤b,相应的约束图是一个带权有向图G=(V,E),其中V={v0,v1,…,vn},而且E={ (vi,vj) : xj-xi≤bk是一个约束}∪{ (v0,v1) , (v0,v2) , … , (v0,vn) }。
引入附加顶点v0是为了保证其他每个顶点均从v0可达。
因此,顶点集合V由对应于每个未知量xi的顶点vi和附加的顶点v0组成。
边的集合E由对应于每个差分约束条件的边与对应于每个未知量xi的边(v0,vi)构成。
如果xj-xi≤bk是一个差分约束,则边(vi,vj)的权w(vi,vj)=bk(注意i和j不能颠倒),从v0出发的每条边的权值均为0。
最短路算法(bellman-Ford算法)
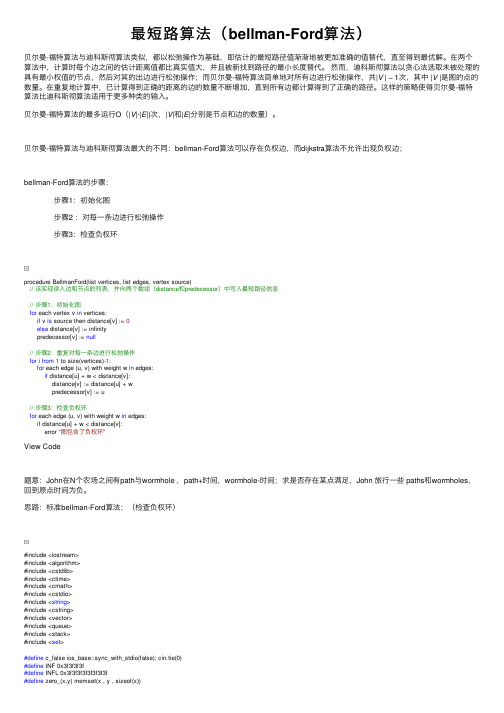
最短路算法(bellman-Ford算法)贝尔曼-福特算法与迪科斯彻算法类似,都以松弛操作为基础,即估计的最短路径值渐渐地被更加准确的值替代,直⾄得到最优解。
在两个算法中,计算时每个边之间的估计距离值都⽐真实值⼤,并且被新找到路径的最⼩长度替代。
然⽽,迪科斯彻算法以贪⼼法选取未被处理的具有最⼩权值的节点,然后对其的出边进⾏松弛操作;⽽贝尔曼-福特算法简单地对所有边进⾏松弛操作,共|V | − 1次,其中 |V |是图的点的数量。
在重复地计算中,已计算得到正确的距离的边的数量不断增加,直到所有边都计算得到了正确的路径。
这样的策略使得贝尔曼-福特算法⽐迪科斯彻算法适⽤于更多种类的输⼊。
贝尔曼-福特算法的最多运⾏O(|V|·|E|)次,|V|和|E|分别是节点和边的数量)。
贝尔曼-福特算法与迪科斯彻算法最⼤的不同:bellman-Ford算法可以存在负权边,⽽dijkstra算法不允许出现负权边;bellman-Ford算法的步骤: 步骤1:初始化图 步骤2 :对每⼀条边进⾏松弛操作 步骤3:检查负权环procedure BellmanFord(list vertices, list edges, vertex source)// 该实现读⼊边和节点的列表,并向两个数组(distance和predecessor)中写⼊最短路径信息// 步骤1:初始化图for each vertex v in vertices:if v is source then distance[v] := 0else distance[v] := infinitypredecessor[v] := null// 步骤2:重复对每⼀条边进⾏松弛操作for i from1 to size(vertices)-1:for each edge (u, v) with weight w in edges:if distance[u] + w < distance[v]:distance[v] := distance[u] + wpredecessor[v] := u// 步骤3:检查负权环for each edge (u, v) with weight w in edges:if distance[u] + w < distance[v]:error "图包含了负权环"View Code题意:John在N个农场之间有path与wormhole ,path+时间,wormhole-时间;求是否存在某点满⾜,John 旅⾏⼀些 paths和wormholes,回到原点时间为负。
bellmanford算法例题
bellmanford算法例题Bellman-Ford算法例题Bellman-Ford算法是一种用于解决带有负权边的图中单源最短路径问题的经典算法。
它可以应用于各种场景,如网络路由、货物配送等。
本文将通过一个例题来介绍Bellman-Ford算法的原理和应用。
假设有一个有向图G,其中包含了n个顶点和m条边。
我们的目标是找到一个顶点s到其余所有顶点的最短路径。
在这个图中,存在负权边,因此Dijkstra算法不适用。
现在我们将使用Bellman-Ford算法来解决这个问题。
首先,我们需要定义一些符号和变量:- n:图G中的顶点数- m:图G中的边数- dist[1..n]:存储顶点s到各个顶点的最短路径长度的数组- edges[1..m]:图G中的边集合,每条边包含两个顶点和其权重接下来,我们来具体描述Bellman-Ford算法的实现过程:1. 初始化:将dist数组中除了起点s的其他元素均设为无穷大,将起点s的dist值设为0。
2. 进行n-1次迭代:- 对于图G中的每一条边(u, v, w),其中u是起点,v是终点,w 是边的权重,我们进行松弛操作(relaxation):- 如果dist[u] + w < dist[v],则更新dist[v]的值为dist[u] + w。
3. 最后,我们再进行一次迭代,检查是否存在负权环路(negative cycle)。
如果在这一次迭代中,仍然可以进行松弛操作并更新dist数组的值,则说明存在负权环路。
接下来,我们通过一个例题来演示Bellman-Ford算法的应用。
假设有如下图所示的有向图G:```5 1(s) ────►(B)────►(C)──▲───2──▲ │10│ │3 │4──▼──5───▼ ▼(E) ─────────►(D)2```我们的目标是求解顶点s到其他顶点的最短路径。
首先,我们初始化dist数组:- dist[s] = 0- dist[B] = ∞- dist[C] = ∞- dist[D] = ∞- dist[E] = ∞接下来,我们进行n-1=4次迭代,对图G中的每条边进行松弛操作:- 第一次迭代:- dist[B] = min(dist[B], dist[s] + 5) = min(∞, 0 + 5) = 5- dist[E] = min(dist[E], dist[s] + 10) = min(∞, 0 + 10) = 10- 第二次迭代:- dist[C] = min(dist[C], dist[B] + 1) = min(∞, 5 + 1) = 5- dist[D] = min(dist[D], dist[C] + 4) = min(∞, 5 + 4) = 9- 第三次迭代:- dist[D] = min(dist[D], dist[C] + 4) = min(9, 5 + 4) = 9- 第四次迭代:- 无需更新最后,我们进行一次迭代来检查是否存在负权环路:- dist[D] = min(dist[D], dist[C] + 4) = min(9, 5 + 4) = 9由于在这次迭代中,dist数组的值没有更新,说明不存在负权环路。
算法导论-单源最短路径习题解
算法导论-单源最短路径习题解24.1-5 设G=(V,E)为⼀带权有向图,其权函数w: E->R。
请给出⼀个O(VE)时间的算法,对于每个顶点v 属于V,找出值δ*(v) =min{δ(u,v)},u属于V。
解: 1. 对每个顶点,令d[v] = 0。
(初始情况,如果没有负权边,则δ*(v) = 0) 2. ⽤Bellman-ford算法,计算d[v],得d[v] = δ*(v)。
简单证明:设δi(u,v)为从u到v边个数不超过i的路径的最⼩值。
δ*i (v) = min{δi(u,v)},u属于V。
则有δ*(v) = δ*n-1(v)。
可以数学归纳法证明d[v] <= δ*i(v)。
显然d[v] <= δ*0(v) = 0。
假设在Bellman-ford 算法前i次迭代中 d[v] <= δ*i(v) 成⽴,u为所有与v相邻的顶点。
对第i+1次迭代,如果δ*i+1(v) = δ*i(v),则d[v]<= δ*i(v)恒成⽴,否则在此轮中边[u,v]被松弛,所以有d[v] = min{d[u] + w[u,v]} <= min{δ*i(u) + w[u,v]} = δ*i+1(v)。
所以有d[v] <= δ*n-1(v),⼜d[v]为两顶点间路径长,所以有d[v] = δ*n-1(v)。
24.1-6 假定⼀加权有向图G=(V,E) 包含⼀负权回路。
请给出⼀个能够列出此回路上的顶点的⾼效算法,并证明你的算法的正确性。
解:Bellman-ford 算法,如果发现d[v] > d[u] + w[u,v],则点u,v处于⼀个负权回路中,此时可以通过寻找前驱顶点得到负权回路。
时间复杂度O(VE)。
24.2-4 给出⼀个⾼效算法来统计有向⽆回路图中的全部路径数。
分析所给出的算法。
解: 对图进⾏拓朴排序,然后按照拓朴排序的逆顺序计算N[u],其中N[u] = sum{N[v]}, [u,v]是所有以u为出发点的边。
单源最短路问题
单源最短路问题(SSSP问题)单源最短路问题指的是该顶点至所有可达顶点的最短路径问题.约定:从start到点i的距离为d[i]。
如果d[i]==INF,说明start和i不连通。
(1) Dijkstra算法! [邻接矩阵]Dijkstra算法是贪心算法。
它只适用于所有边的权都大于0的图。
它的主要特点是以起始点为中心向外层层扩展(广度优先搜索思想),直到扩展到终点为止。
基本思想通过Dijkstra计算图G中的最短路径时,需要指定起点s(即从顶点s开始计算).此外,引进两个集合S和U。
S的作用是记录已求出最短路径的顶点(以及相应的最短路径长度),而U则是记录还未求出最短路径的顶点(以及该顶点到起点s的距离)。
操作步骤(1)初始时,S只包含起点s;U包含除s外的其他顶点,且U中顶点的距离为"起点s到该顶点的距离"[如,U中顶点v的距离为(s,v)的长度,然后s和v不相邻,则v的距离为∞]。
(2)从U中选出"距离最短的顶点k",并将顶点k加入到S中;同时,从U中移除顶点k。
(3)更新U中各个顶点到起点s的距离。
之所以更新U中顶点的距离,是由于上一步中确定了k是求出最短路径的顶点,从而可以利用k来更新其它顶点的距离;例如,(s,v)的距离可能大于(s,k)+(k,v)的距离。
(4)重复步骤(2)和(3),直到遍历完所有顶点。
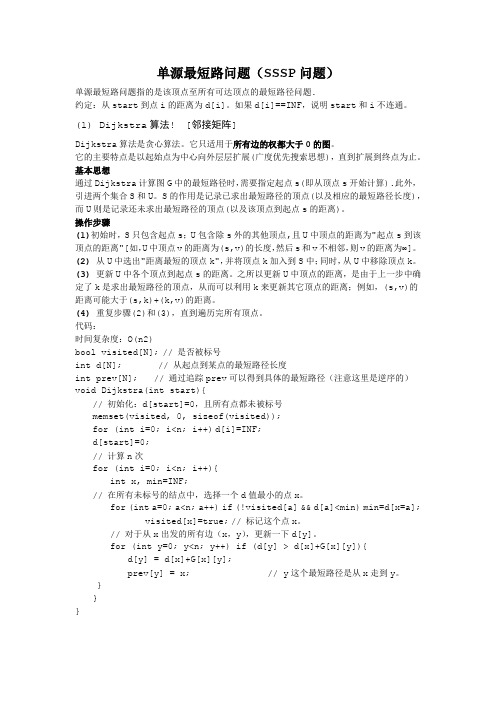
代码:时间复杂度:O(n2)bool visited[N]; // 是否被标号int d[N]; // 从起点到某点的最短路径长度int prev[N]; // 通过追踪prev可以得到具体的最短路径(注意这里是逆序的)void Dijkstra(int start){// 初始化:d[start]=0,且所有点都未被标号memset(visited, 0, sizeof(visited));for (int i=0; i<n; i++) d[i]=INF;d[start]=0;// 计算n次for (int i=0; i<n; i++){int x, min=INF;// 在所有未标号的结点中,选择一个d值最小的点x。
Bellman_ford算法
Bellman-Ford算法思想Bellman-Ford算法能在更普遍的情况下(存在负权边)解决单源点最短路径问题。
对于给定的带权(有向或无向)图G=(V,E),其源点为s,加权函数w是边集 E 的映射。
对图G运行Bellman-Ford算法的结果是一个布尔值,表明图中是否存在着一个从源点s可达的负权回路。
若不存在这样的回路,算法将给出从源点s到图G的任意顶点v的最短路径d[v]。
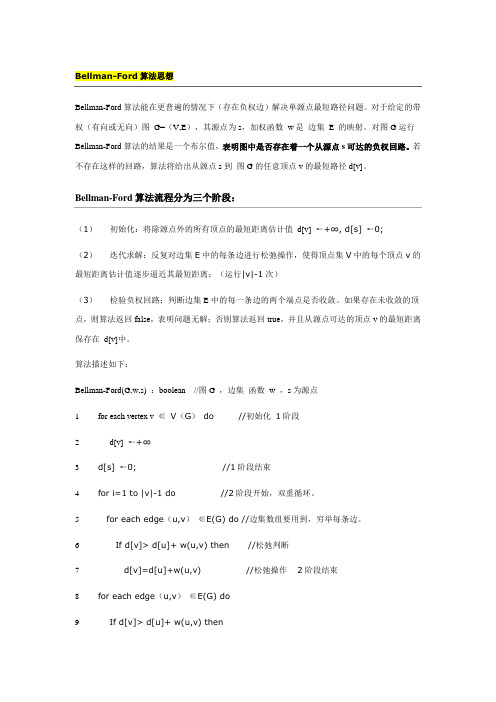
Bellman-Ford算法流程分为三个阶段:(1)初始化:将除源点外的所有顶点的最短距离估计值d[v]←+∞, d[s] ←0;(2)迭代求解:反复对边集E中的每条边进行松弛操作,使得顶点集V中的每个顶点v的最短距离估计值逐步逼近其最短距离;(运行|v|-1次)(3)检验负权回路:判断边集E中的每一条边的两个端点是否收敛。
如果存在未收敛的顶点,则算法返回false,表明问题无解;否则算法返回true,并且从源点可达的顶点v的最短距离保存在d[v]中。
算法描述如下:Bellman-Ford(G,w,s) :boolean //图G ,边集函数w ,s为源点1 for each vertex v∈V(G)do //初始化1阶段2 d[v]←+∞3 d[s] ←0; //1阶段结束4 for i=1 to |v|-1 do //2阶段开始,双重循环。
5 for each edge(u,v)∈E(G) do //边集数组要用到,穷举每条边。
6 If d[v]> d[u]+ w(u,v) then //松弛判断7 d[v]=d[u]+w(u,v) //松弛操作2阶段结束8 for each edge(u,v)∈E(G) do9 If d[v]> d[u]+ w(u,v) then10 Exit false11 Exit true下面给出描述性证明:首先指出,图的任意一条最短路径既不能包含负权回路,也不会包含正权回路,因此它最多包含|v|-1条边。
Bellman-ford算法
{ for(u=0; u< vexnum; u++)//修改每个顶点的dist[u]和path[u]
{
if( u != v )
{ for(i=0; i<vexnum; i++)//考虑其他每个顶点
{
if( Edge[i][u]<MAX &&
dist[u]>dist[i]+Edge[i][u] )
{
dist[u]=dist[i]+Edge[i][u];
{
int i, k, u;
for(i=0; i<vexnum; i++)
{
dist[i]=Edge[v][i];
//对dist[ ]初始化
if( i!=v && dis[i]<MAX ) path[i] = v; //对path[ ]初始化
else path[i] = -1;
}
5
for(k=2; k<vexnum; k++) //从dist1[u]递推出dist2[u], …,distn-1[u]
-2
1
0
7
1
2
(c)
1
Bellman-Ford算法思想
Bellman-Ford算法构造一个最短路径长度数组序列dist 1 [u], dist 2 [u], …, dist n-1 [u]。其中:
dist 1 [u]为从源点v到终点u的只经过一条边的最短路径长度,并有dist 1 [u]
=Edge[v][u]; dist 2 [u]为从源点v最多经过两条边到达终点u的最短路径长度; dist 3 [u]为从源点v出发最多经过不构成负权值回路的三条边到达终点u的最短
几种常用的最短路径算法
简述几种常用的最短路径算法摘要:随着社会的发展,最短路径问题在现实生活中占据的地位越来越重要。
求解这一类问题的方法有很多,包括Floyd算法、Dijkstra算法、Bellman-Ford算法、动态规划算法和智能优化算法。
其中较为常用的是Floyd算法、Dijkstra算法和Bellman-Ford算法。
本文将简单介绍这三种最短路径算法,通过比较各种方法的优劣使对其有更进一步的认识和学习。
关键字:最短路径;最短路径算法;Floyd算法;Dijkstra算法;Bellman-Ford算法随着计算机科学的发展,人们生产生活效率要求的提高,最短路径问题逐渐成为计算机科学、运筹学、地理信息科学等学科的一个研究热点。
也正因为最短路径问题在实际生产生活中应用广泛,优化该算法和提高算法的求解效率具有重大的现实意义。
1.最短路径概述最短路径问题是指在一个赋权图的两个节点之间找出一条具有最小权的路径,这是图论的描述,也是图论中研究的一个重要问题。
现实生活中我们可以看到这些最短路径问题的例子,公交车辆的最优行驶路线和旅游线路的选择等;军事领域中也有应用,作战部队的行军路线等问题就与寻找一个图的最短路径密切相关,因此对最短路径问题的深入研究和广泛应用具有重要意义和实用价值。
在线路优化问题中,如果优化指标与路程的相关性较强,而和其他因素相关性较弱时,即以最短路程为准则,则考虑转化为最短路径问题。
比如军事行军线路选取时,假如从出发地到目的地之间有多种线路可以选取,危险指数在预测概率相等时,就要考虑最短路径问题。
2.最短路径算法概述最短路径算法问题是图论研究中的一个经典算法问题,旨在寻找图(由结点和路径组成的)中两结点之间的最短路径。
算法具体的形式包括:确定起点的最短路径问题- 即已知起始结点,求最短路径的问题。
确定终点的最短路径问题- 与确定起点的问题相反,该问题是已知终结结点,求最短路径的问题。
在无向图中该问题与确定起点的问题完全等同,在有向图中该问题等同于把所有路径方向反转的确定起点的问题。
差分约束系统例题详解

差分约束系统例题详解例1:pku1364已知一个序列a[1], a[2], ......, a[n],给出它的若干子序列以及对该子序列的约束条件,例如a[si], a[si+1], a[si+2], ......, a[si+ni],且a[si]+a[si+1]+a[si+2]+......+a[si+ni] < or > ki。
问题关键在于如何转化约束条件,开始我想以序列中的每一个值做一个点,如a[1], a[2] ……,就发现他们的关系是多者之间的关系,跟差分系统对不上,在看到MickJack的讲解后,才知道,用前n项和来转化成两两之间的关系。
如:s[a] + s[a+1] + …… + s[b] < c 可以转化成前n项和sum[b] - sum[a - 1] < c,为了能用Bellman_Ford,即将< 转化成<= ,sum[b] - sum[a - 1] <= c - 1。
我用Bellman_Ford写的:#include<stdio.h>#define INF 0xfffffff#define NN 104int index, n;int dis[NN];struct node{int s, e, v;}edge[NN];void add(int a, int b, int c){edge[index].s = a;edge[index].e = b;edge[index].v = c;index++;}void Init(int s){int i;for (i = 0; i <= n; i++){dis[i] = INF;}dis[s] = 0;}void Relax(int s, int e, int v){if (dis[e] > dis[s] + v){dis[e] = dis[s] + v;}}/*查找负边权回路,1表示存在*/int Bellman_Ford(){Init(0);int i, j;for (i = 1; i <= n; i++){for (j = 0; j < index; j++){Relax(edge[j].s, edge[j].e, edge[j].v);}}for (j = 0; j < index; j++){if (dis[edge[j].e] > dis[edge[j].s] + edge[j].v){return 1;}}return 0;}int main(){char str[4];int a, b, c, m;while (scanf("%d", &n) != EOF){if (n == 0) break;scanf("%d", &m);index = 0;while (m--){scanf("%d%d%s%d", &a, &b, str, &c);if (str[0] == 'l'){add(a - 1, a + b, c - 1); // c-1 使得< 变成<= 就能够判负环了}else{add(a + b, a - 1, -c - 1);}}if(Bellman_Ford()) puts("successful conspiracy");else puts("lamentable kingdom");}return 0;}做这题时,我用重新学习了下Bellman_Ford,感觉这个写的挺不错的。
Bellman-Ford
最短路径算法—Bellman-Ford(贝尔曼-福特)算法分析与实现(C/C++)ByTanky Woo– 2011年01月17日Posted in:我的原创|My Original Creation, 算法|Algorithms相关文章:1.Dijkstra算法:/?p=18902.Floyd算法:/?p=1903Dijkstra算法是处理单源最短路径的有效算法,但它局限于边的权值非负的情况,若图中出现权值为负的边,Dijkstra算法就会失效,求出的最短路径就可能是错的。
这时候,就需要使用其他的算法来求解最短路径,Bellman-Ford算法就是其中最常用的一个。
该算法由美国数学家理查德•贝尔曼(Richard Bellman, 动态规划的提出者)和小莱斯特•福特(Lester Ford)发明。
Bellman-Ford算法的流程如下:给定图G(V, E)(其中V、E分别为图G的顶点集与边集),源点s,∙数组Distant[i]记录从源点s到顶点i的路径长度,初始化数组Distant[n]为, Distant[s]为0;∙以下操作循环执行至多n-1次,n为顶点数:对于每一条边e(u, v),如果Distant[u] + w(u, v) < Distant[v],则另Distant[v] = Distant[u]+w(u, v)。
w(u, v)为边e(u,v)的权值;若上述操作没有对Distant进行更新,说明最短路径已经查找完毕,或者部分点不可达,跳出循环。
否则执行下次循环;∙为了检测图中是否存在负环路,即权值之和小于0的环路。
对于每一条边e(u, v),如果存在Distant[u] + w(u, v) < Distant[v]的边,则图中存在负环路,即是说改图无法求出单源最短路径。
否则数组Distant[n]中记录的就是源点s到各顶点的最短路径长度。
可知,Bellman-Ford算法寻找单源最短路径的时间复杂度为O(V*E).首先介绍一下松弛计算。
差分约束系统解析

差分约束系统poj1201 ,poj1275的解题报告现在发现刘汝佳写的书真的是给高手看的!。
要是一个半懂的人去看这本书根本不知所云。
简直就是晦涩难懂。
但是一旦把问题搞懂了再去看,就发现居然这个书全讲的是重点。
看来这本书只适合于做指导用。
我基本上没怎么看懂这个书。
这几天做差分系统的题的时候,经常碰到这种情况:为什么题目明明要求的是求某某值的最小值。
但找的资料上却说的用最长路求法。
还有的地方要求某函数值的最大值,但用的方法却是求最短路的方法。
到底是求最短路还是求最长路?最终我发现了。
只要是能用bellman_ford解决的差分约束系统,既可以用最长路求法求得,也可以用最短路求得。
并且部分可以用Dijkstra解决!其实个人觉得用“单原点最短路,单原点最长路求法”这个两个说法来描述用bellman_ford 解决差分约束系统是不准确的。
在一般的最短路径求法中对应的松弛操作为:If dist[b]》dist[a]+ w[a][b] thendist[b]= dist[a]+ w[a][b]。
(1)然而在所谓的最长路求法中松弛操作变为了If dist[b]《dist[a]+ w[a][b] thendist[b]= dist[a]+ w[a][b]。
(2)也就是说,最短路就是对应(1)号松弛方法,最长路对应(2)号而已。
现在先来看看一般的例子:假如有如下不等式组:(即求出来的最终答案要保证下列不等式成立)s[bi] -s[ai]>= ci; 0<=ai,bi<= max; i=1,2,3,。
现在求s[max]的最小值.用求最长路的方法:即用(2)号松弛方法先将不等式变形:s[bi]>=s[ai]+ci;即保证s[bi] 不小于s[ai]+ci;而(2)号松弛操作的作用也是这个。
即保证dist[b]不小于dist[a]+ w[a][b]于是这个个不等式便与这种松弛操作统一了。
所以就设a到b的路径为ci。
noip完整考纲
由本人精心整理,得到的童鞋赚到了哦标有★的都是noip中几乎不可能出现的,没有标的最好是完全掌握,才好拿国一哦。
1.语言与计算机递归调用向前引用随机化指针类型按位运算3.数论(一)素性判断筛选建立素数表分解质因数进制转换二分取幂★二分求解线性递推方程5.四则运算表达式计算高精度加法2.排序冒泡排序(起泡排序)选择排序插入排序★Shell排序快速排序线性时间排序查找第k大元素带第二关键字的排序4.数论(二)求最大公约数求最小公倍数★扩展的辗转相除★求解一元一次同余式★中国剩余定理★高斯消元6.图论:最小生成树Prim算法Kruskal算法★Boruvka算法次小生成树高精度减法高精度乘法★高精度除法7.图论:求最短路Dijkstra算法Bellman-Ford算法Floyd-Warshall算法次短路★差分约束系统9.图论:BFS遍历广度优先搜索(宽度优先搜索)求不带权的最短路求图的直径AOV问题(拓扑排序)AOE问题11.树求树的最短链二叉树的四种遍历已知先序中序求后序已知中序后序求先序★已知先序后序求中序8.图论:DFS遍历深度优先搜索欧拉回路求弱连通分量★求强连通分量★求割点★求桥10.图论:二分图验证二分图匈牙利算法★KM算法★稳定婚姻系统★LCA问题的Tarjan离线算法★Huffman编码13.数据结构(二)★平衡二叉树★树状数组★线段树★块状链表15.动态规划(一)0-1背包完全背包乘法问题数塔问题装箱问题17.分治与递归二分查找归并排序最近点对问题求最大子序列和的O(nlogn)算法Hanoi塔问题及其变种棋盘覆盖问题并查集堆二叉查找树14.排列与组合生成所有排列生成所有组合生成下一个排列生成下一个组合16.动态规划(二)最长上升序列(LIS)最长公共子串(LCM)最小代价子母树18.贪心最优装载问题部分背包问题独立区间的选择覆盖区间的选择区间的最小点覆盖点的最小区间覆盖循环赛日程表问题19.递推Fibonacci数的若干应用Catalan数的若干应用拆分数差分序列20.其它★网络流★置换群★KMP算法。
bellman-ford算法求带负环的最短路
bellman-ford算法求带负环的最短路一、背景介绍带负环的最短路问题是图论中的一个经典问题,它涉及到图中的两点之间最短路径的计算。
如果图中存在负权环,即从起点到终点的路径上的某些节点存在负权,而整个路径的总权值却是负数,那么这个图就存在负权环。
这种情况下,通常使用Bellman-Ford算法来求解最短路。
二、Bellman-Ford算法原理Bellman-Ford算法是一种用于求解带负权环图的最短路径问题的算法。
该算法的核心思想是通过多次迭代更新节点的距离信息,并利用松弛操作来排除负权环的存在。
算法的主要步骤如下:1. 初始化:将所有节点的距离初始化为无穷大,将起点距离自身设为0。
2. 松弛操作:对于每一条边,从起点开始沿着这条边走到下一个节点,并更新该节点的距离值。
如果发现存在负权环,则算法终止,因为存在负权环则无法找到最短路径。
3. 再次松弛:重复步骤2,直到所有节点都被处理过。
该算法的时间复杂度为O(V^2),其中V是图中节点的数量。
这是因为算法需要遍历所有节点之间的边,并执行松弛操作。
空间复杂度为O(V),其中V是图中节点的数量,因为需要存储每个节点的距离信息。
三、应用场景Bellman-Ford算法适用于求解带负权环图的最短路径问题,特别是在一些实际应用中,如物流配送、网络优化等场景中,需要快速找到两点之间的最短路径。
四、代码实现下面是一个使用Python实现的Bellman-Ford算法的示例代码:```pythondef bellman_ford(graph, start):# 初始化距离字典和前驱节点字典dist = {node: float('inf') for node in graph}dist[start] = 0prev = {node: None for node in graph}# 松弛操作for _ in range(len(graph) - 1):for node in graph:for neighbor, weight in graph[node]:if dist[node] + weight < dist[neighbor]: dist[neighbor] = dist[node] + weight prev[neighbor] = node# 检查是否存在负权环for node in graph:for neighbor, weight in graph[node]:if dist[node] + weight < dist[neighbor]:return "图中存在负权环"return dist, prev```上述代码中,`graph`是一个邻接表表示的图,`start`是起点节点。
贝尔曼福特算法原理
贝尔曼福特算法原理
贝尔曼-福特(Bellman-Ford)算法是一种用于计算图中单源最短路径的算法,即从图中的一个顶点到其他所有顶点的最短路径。
该算法是由理查德·贝尔曼(Richard Bellman)和利奥·福特(Lester Ford)在1958年提出的。
算法的基本原理如下:
1.初始化距离:首先,将源节点到各个节点的距离估计设为无穷大(或一个足够大的数),源节点到自身的距离设为0。
2.迭代松弛操作:对图中的每条边进行一系列的松弛操作。
松弛操作的目的是通过比较通过当前节点是否能够获得更短的路径来更新到其他节点的距离。
3.重复迭代:重复进行对所有边的松弛操作,这个过程被重复进行V-1次,其中V是图中节点的数量。
在每一次迭代后,节点的最短路径估计值会逐渐收敛。
4.检测负权环:在进行V-1次迭代后,如果还存在可以通过继续松弛操作而改变距离估计值的情况,说明图中存在负权环。
这是由于在负权环中,可以不断降低路径的长度。
负权环的存在会导致算法无法正常收敛,因此在这种情况下,算法会判断图中存在负权环。
贝尔曼-福特算法相对于迪杰斯特拉(Dijkstra)算法的优势在于,它能够处理图中存在负权边的情况,但是在图中没有负权边的情况下,迪杰斯特拉算法通常更为高效。
然而,贝尔曼-福特算法的时间复杂度为O(VE),其中V是节点的数量,E是边的数量,相对较高,因此在一些情况下可能不如其他更高效的算法。
Bellman-Ford算法(贝尔曼-福特算法)
Bellman-Ford算法(贝尔曼-福特算法)定义贝尔曼-福特算法,求解单源最短路径问题的⼀种算法,由理查德·贝尔曼(Richard Bellman)和莱斯特·福特创⽴的。
它的原理是对图进⾏松弛操作,得到所有可能的最短路径。
其优于迪科斯彻算法的⽅⾯是边的权值可以为负数、实现简单,缺点是时间复杂度过⾼。
原理Bellman-Ford算法通过松弛(如果 dist[v] < dist[u] + w,则dist[v] = dist[u] + w),反复利⽤已有的边来更新最短距离。
如果不存在负权回路,应当会在 (n-1) 次松弛之后结束。
因为任意两点间的最短路径⾄多经过 (n-2) 个点,因此经过 (n-1) 次操作后就可以得到最短路径。
如果存在负权回路,那么第 n 次松弛操作仍然会成功,Bellman-Ford算法就是利⽤这个性质判定负环。
实现#include<bits/stdc++.h>using namespace std;const int inf=0x3f3f3f3f;const int maxn=10005;struct node{int u,v,w;}edge[maxn];int dis[maxn],n,m;int Bellman_Ford(int s);int main(){int i;scanf("%d%d",&n,&m);for(i=1;i<=m;i++) scanf("%d%d%d",&edge[i].u,&edge[i].v,&edge[i].w);if(Bellman_Ford(1)) printf("有负环\n");system("pause");return0;}int Bellman_Ford(int s){int check,flag=0,i,j;fill(dis,dis+maxn,inf); dis[s]=0;for(j=1;j<=n-1;j++){check=0;for(i=1;i<=m;i++)if(dis[edge[i].v]>dis[edge[i].u]+edge[i].w){dis[edge[i].v]=dis[edge[i].u]+edge[i].w;check=1;}if(!check)break;}for(i=1;i<=m;i++)if(dis[edge[i].v]>dis[edge[i].u]+edge[i].w){flag=1;break;}if(flag) return1;elsefor(i=1;i<=n;i++)printf("%d->%d %d\n",s,i,dis[i]); return0;}。
bellman-ford算法
bellman-ford算法
什么是Bellman-Ford算法?
Bellman-Ford,是求解单源最短路经问题的⼀种算法,由Richard Bellman和莱斯特.福特创⽴的。
它的原理是对图进⾏|V|-1次松弛操作,得到所有可能的最短路经。
其优于的⽅⾯是边的权值可以为负数、实现简单,缺点是时间复杂度⾼,⾼达O(V*E),V:顶点数,E:边数。
但算法可以进⾏优化,以提⾼效率。
Bellman-Ford与Dijkstra的相同点:
计算时每个边的之间的估计距离值都⽐真实值⼤,并且被新找到的路经的最⼩长度替代。
不同点:
Dijkstra算法是从源点s出发向外扩,逐个处理相邻的节点,不会去重复处理节点,这样处理会⽐Bellman-Ford效率更⾼⼀点;
Bellman-Ford算法每次都是从源点s重新出发进⾏relax操作,共V-1次,V是顶点数;
算法思想 ()
初始化时把起点s到各个顶点v的距离dist(s->v)设为∞,dist(s->s)设为0;
计算最短路经,执⾏V-1次遍历;
对于图中的每条边:如果起点s的距离d加上边的权值w⼩于终点v的距离d,则更新终点v的距离值d;
检测图中是否有负权边形成了环,遍历图中的所有边,计算s⾄v的距离,如果对于v存在更⼩的距离,则说明存在环;
Bellman-Ford算法的⽤途
从A出发,是否存在到达各个节点的路经(有计算出值表⽰可以到达);
从A出发,到达各个节点最短路经(时间最少、或者路经最少等);
图中是否存在负环路(权重之和为负数);
Leetcode例⼦。
贝尔曼福德算法
贝尔曼福德算法摘要:1.贝尔曼福德算法简介2.算法原理与过程3.应用领域与实际案例4.优缺点分析5.总结正文:贝尔曼福德算法(Bellman-Ford Algorithm)是一种解决单源最短路径问题的算法,由美国数学家Richard Bellman和英国计算机科学家Lester Ford 于1956年提出。
该算法以他们的名字命名,是一种动态规划算法,适用于存在负权值边的图。
1.贝尔曼福德算法简介贝尔曼福德算法是一种解决单源最短路径问题的算法,主要解决的是在存在负权值边的图中,寻找源节点到其他所有节点的最短路径问题。
该算法通过动态规划的方式,自底向上地计算每个节点到源节点的最短路径。
2.算法原理与过程贝尔曼福德算法的核心思想是:对于每个节点k,我们通过计算其他所有节点的最短路径长度,来更新节点k的最短路径长度。
具体过程如下:(1) 初始化:将源节点的最短路径长度设为0,其他节点的最短路径长度设为无穷大。
(2) 迭代:对于图中的每个节点k,遍历与节点k相邻的所有节点j,计算从节点k到节点j的路径长度,并与当前节点j的最短路径长度进行比较。
如果从节点k到节点j的路径长度更短,则更新节点j的最短路径长度。
(3) 重复步骤(2)的迭代过程n-1次,其中n为图的顶点数。
(4) 检验:若在迭代过程中发现有节点的最短路径长度未发生变化,说明该节点不存在最短路径,返回不存在最短路径的结果。
3.应用领域与实际案例贝尔曼福德算法广泛应用于计算机网络、运筹学、人工智能等领域,解决单源最短路径问题。
例如,在网络路由协议中,通过计算网络中各个节点到源节点的最短路径,可以优化路由策略,提高网络传输效率。
4.优缺点分析优点:- 适用于存在负权值边的图,具有较强的适应性。
- 算法的时间复杂度为O(nm),其中n为图的顶点数,m为边的数量,相对较低。
缺点:- 当图中存在负权值环时,算法可能会陷入死循环,无法得到正确结果。
- 算法依赖于动态规划,对于大规模的图,空间复杂度较高。
Bellman_ford算法
Bellman-Ford算法思想Bellman-Ford算法能在更普遍的情形下(存在负权边)解决单源点最短途径问题。
关于给定的带权(有向或无向)图 G=(V,E),其源点为s,加权函数 w是边集 E 的映射。
对图G运行Bellman-Ford算法的结果是一个布尔值,说明图中是不是存在着一个从源点s可达的负权回路。
假设不存在如此的回路,算法将给出从源点s到图G的任意极点v的最短途径d[v]。
Bellman-Ford算法流程分为三个时期:(1)初始化:将除源点外的所有极点的最短距离估量值 d[v] ←+∞, d[s] ←0;(2)迭代求解:反复对边集E中的每条边进行松弛操作,使得极点集V中的每一个极点v的最短距离估量值慢慢逼近其最短距离;(运行|v|-1次)(3)查验负权回路:判定边集E中的每一条边的两个端点是不是收敛。
若是存在未收敛的极点,那么算法返回false,说明问题无解;不然算法返回true,而且从源点可达的极点v的最短距离保留在 d[v]中。
算法描述如下:Bellman-Ford(G,w,s) :boolean题目练习:(转)差分约束系统设S(i)为 0..i-1 中在最终序列中的的整数个数。
那么约束条件如下:S(b)-S(a) >= c0 <= S(i+1) - S(i) <= 1 <==> S(i+1)-S(i) >= 0;S(i)-S(i+1) >= -1注意此题要求的是最小值, 而依照>=号建图后发觉图中有负环, 如何办呢?其实很简单, 此题求的不是最短路, 而是最长路! Bellman_ford即可!出纳员的雇佣黑书上有详细讲解差分约束系统那个题目构图以后, 只需要用bellman_ford判定是不是有负圈.构图方式:第一进行转换:a[j]+...+a[j+m] = a[1]+...a[j+m] - (a[1]+...+a[j-1]) = sum[j+m] -sum[j-1] >(<) ki. 差分约束只能全数是<=或(>=).第二步转换: sum[j+m]-sum[j-1] <= ki-1 或 sum[j-1]-sum[j+m] <= -ki-1.约束图构造好后确实是简单的Bellman-Ford了!是1201的简单版本, 贪婪算法能够取得更好的成效.差分约束题, 处置一劣等号的情形, 然后一般的Bellman_ford最短途径Bellman-Ford超时, Dijkstra算法能够高效解决, SPFA(队列)竟然超时...SPFA修改成堆栈实现就过了.差分约束Bellman-Ford 和 SPFA 实现都可判定负权回路单纯的最短途径可练习SPFA我做的第一道Bellman-Ford题目。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
时间复杂度
算法复杂度为O(VE) 其中V=顶点数,E=边数
我们知道Dijkstra的算法复杂度是O(V^2),经 过优化的Dijkstra算法可以达到O((V+E)logE)
所以Bellman-Ford算法并不比它快,但实际上 Bellman-Ford算法也是可以优化的
列可以用双向队列,也可以两个普通队列 初始时将源加入队列。每次从队列中取出一个
元素,并对所有与他相邻的点进行松弛,若某 个相邻的点松弛成功,则将其入队。直到队列 为空时算法结束。
SPFA算法的效率
时间复杂度一般认为是O(kE) 其中k是一个较大的常数,不好估计,但是可
以看出SPFA算法效率应当是很高的 经验表明Dijkstra算法的堆优化要比SPFA快,
Bellman-Ford算法的核心思想——松弛 Dist[u]和Dist[v]应当满足一个关系,即
Dist[v]<=Dist[u]+w[u,v] 反复的利用上式对Dist数组进行松弛,如果没
有负权回路的话,应当会在有限次松弛之后结 束。那么上限是多少次呢?
Bellman-Ford算法思想
考虑对每条边进行1次松弛的时候,得到的实 际上是至多经过0个点的最短路径,对每条边 进行两次松弛的时候得到的是至多经过1个点 的最短路径,……
问题的转化
问题要求输出至少有多少个整点 如果用数组S[i]表示在[0,i]这个区间上面有多少
个点,则题中输入数据ai,bi,ci可以表示为 S[bi]-S[ai-1]>=ci 除此之外还有隐含条件: S[i+1]-S[i]>=0 S[i+1]-S[i]<=1 可以建立一个图,利用Bellman-Ford算法求解
i指向j,权值为k,这样就把差分约束系统问题 转化为最短路径问题了,然后利用BellmanFord算法求解
与Bellman-Ford算法对比
差分不等式组可能是没有解的,这实际上就对 应了Bellman-Ford求解存在负权回路
根据具体情况,有的时候要求的是单源最长路 径,道理是一样的
POJ 1201 Intervals
A
1
-1
1
B
E
F
-1
-1
C -1
D
-∞
Dijkstra算法的局限性
如果利用Dijkstra算法求解,结果为……
标记点A,Dist[B]=-1,标记点B
Dist[C]=0,标记点C
Dist[D]=-1,标记点D
Dist[E]=-2,标记点E
Dist[F]=-1,标记点F
所求得的距离 并不是最短的
与Bellman-Ford算法对比
前面用到过Dist[v]<=Dist[u]+w[u,v]在最短路径 求解后应当总是成立的,可以转化为
Dist[u]-Dist[v]>=-w[u,v] 这与前面的不等式约束Xi-Xj>=-k很类似,因此
可以做如下转化: 如果存在约束条件Xi-Xj>=-k,则建立一条边由
如果边权为负值,Dijkstra算法还正确吗?
求解右图A 至其他点的最短距离
算法步骤:
1)标记点A 2)Dist[C]=2最小,标记点C 3)Dist[B]=3最小,标记点B 结束
B
3
-2
但是ShortestDist[C]=1AC2源自Dijkstra算法的局限性
下图中,A至F的最短路径长度是多少?
A
1
-1
1
B
E
F
-1
-1
C
-1
D
错误结果的原因
Dijkstra的缺陷就在于它不能处理负权回路: Dijkstra对于标记过的点就不再进行更新了, 所以即使有负权导致最短距离的改变也不会重 新计算已经计算过的结果
我们需要新的算法——Bellman-Ford
Bellman-Ford算法思想
Bellman-Ford算法基于动态规划,反复用已有 的边来更新最短距离
但SPFA比普通的Dijkstra算法快。而SPFA算 法可以处理负权的问题,而且比Dijkstra算法 的堆优化的代码要容易实现,因此SPFA是一 个很好的算法。
Exercise
POJ 1511 Invitation Cards 可以用SPFA算法
POJ =
差分约束系统
X0=0 X0-X1>=-1 X1-X2>=-5 X2-X3>=-3 求X1,X2,X3最小值 X1=1,X2=6,X3=9 求解差分不等式组有什么好的方法吗?
在区间[0,50000]上面有一些整点
输入数据 5 373 8 10 3 681 131 10 11 1
含义 有5组约束条件(至多50000) 区间[3,7]上至少有3个点 区间[8,10]上至少有3个点 区间[6,8]上至少有1个点 区间[1,3]上至少有1个点 区间[10,11]上至少有1个点
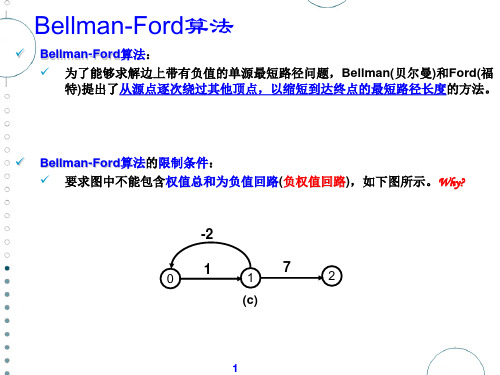
Bellman-Ford算法 与差分约束系统
单源最短路径问题
单源最短路径=Single Source Shortest Path, 即在有向图(或无向图)中求解给定点到其他 点之间的最短距离
我们已知的方法是…… Dijkstra算法 暑期集训的时候已经对该算法做过介绍,这里
不再重复
Dijkstra算法的局限性
如果没有负权回路,那么任意两点间的最短路 径至多经过n-2个点,因此经过n-1次松弛操作 后应当可以得到最短路径
如果有负权回路,那么第n次松弛操作仍然会 成功,这时,最短路径为-∞
Bellman-Ford算法流程
所有点i赋初值Dist[i]= +∞ ,出发点为s, Dist[s]=0
for k=1 to n-1 for 每条边(u,v) 如果d[u]!= +∞ 且d[v]>d[u]+w[u,v] 则d[v]=d[u]+w[u,v]
Bellman-Ford算法的优化
在没有负权回路的时候,至多进行n-1次松弛 操作会得到解,但实际上可能不到n-1此松弛 操作就得到最优解了
可以在每一轮松弛的时候判断是否松弛成功, 如果所有的边都没有松弛的话,说明BellmanFord算法已经可以结束了
进一步的优化——SPFA算法
SPFA=Shortest Path Faster Algorithm 也即Bellman-Ford算法的队列优化,这里的队