汽车驱动力图及Matlab程序
汽车理论习题Matlab程序

确定一轻型货车的动力性能货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算:1绘制汽车驱动力与行驶阻力平衡图;2求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率;3绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间;轻型货车的有关数据:汽油发动机使用外特性的Tq-n曲线的拟合公式为式中,Tq为发动机转矩N m;n为发动机转速r/min;发动机的最低转速nmin =600r/min,最高转速nmax=4000r/min;装载质量 2000kg 整车整备质量 1800kg 总质量 3880kg 车轮半径传动系机械效率ηt=滚动阻力系数f=空气阻力系数×迎风面积C D A=主减速器传动比i0=飞轮转动惯量 I f=m2二前轮转动惯量I w1=m2四后轮转动惯量I w2=m2质心至前轴距离满载 a=质心高满载 hg=解:Matlab程序:1 求汽车驱动力与行驶阻力平衡图和汽车最高车速程序: n=600:10:4000;Tq=+n/1000n/1000.^2+n/1000.^n/1000.^4;m=3880;g=;nmin=600;nmax=4000;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;Ft1=Tqig1i0nT/r;Ft2=Tqig2i0nT/r;Ft3=Tqig3i0nT/r;Ft4=Tqig4i0nT/r;Ft5=Tqig5i0nT/r;ua1=rn/ig1/i0;ua2=rn/ig2/i0;ua3=rn/ig3/i0;ua4=rn/ig4/i0;ua5=rn/ig5/i0;ua=0:5:120;Ff=Gf;Fw=CDAua.^2/;Fz=Ff+Fw;plotua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz;title'驱动力-行驶阻力平衡图';xlabel'uakm/s';ylabel'FtN';gtext'Ft1',gtext'Ft2',gtext'Ft3',gtext'Ft4',gtext'Ft5',gtext'Ff+Fw'; zoom on;x,y=ginput1;zoom off;disp'汽车最高车速=';dispx;disp'km/h';汽车最高车速=km/h2求汽车最大爬坡度程序:n=600:10:4000;Tq=+n/1000n/1000.^2+n/1000.^n/1000.^4;m=3880;g=;nmin=600;nmax=4000;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;Ft1=Tqig1i0nT/r;ua1=rn/ig1/i0;Ff=Gf;Fw1=CDAua1.^2/;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100tanasinmaxFi1/G;disp'汽车最大爬坡度=';dispimax;disp'%';汽车最大爬坡度=%3求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=600:10:4000;Tq=+n/1000n/1000.^2+n/1000.^n/1000.^4;m=3880;g=;nmin=600;nmax=4000;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;Ft1=Tqig1i0nT/r;Ft2=Tqig2i0nT/r;Ft3=Tqig3i0nT/r;Ft4=Tqig4i0nT/r;Ft5=Tqig5i0nT/r;ua1=rn/ig1/i0;ua2=rn/ig2/i0;ua3=rn/ig3/i0;ua4=rn/ig4/i0;ua5=rn/ig5/i0;Fw1=CDAua1.^2/;Fw2=CDAua2.^2/;Fw3=CDAua3.^2/;Fw4=CDAua4.^2/;Fw5=CDAua5.^2/;Ff=Gf;deta1=1+Iw1+Iw2/mr^2+Ifig1^2i0^2nT/mr^2;deta2=1+Iw1+Iw2/mr^2+Ifig2^2i0^2nT/mr^2;deta3=1+Iw1+Iw2/mr^2+Ifig3^2i0^2nT/mr^2;deta4=1+Iw1+Iw2/mr^2+Ifig4^2i0^2nT/mr^2;deta5=1+Iw1+Iw2/mr^2+Ifig5^2i0^2nT/mr^2;a1=Ft1-Ff-Fw1/deta1m;ad1=1./a1;a2=Ft2-Ff-Fw2/deta2m;ad2=1./a2;a3=Ft3-Ff-Fw3/deta3m;ad3=1./a3;a4=Ft4-Ff-Fw4/deta4m;ad4=1./a4;a5=Ft5-Ff-Fw5/deta5m;ad5=1./a5;plotua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5;axis0 99 0 10;title'汽车的加速度倒数曲线';xlabel'uakm/h';ylabel'1/a';gtext'1/a1';gtext'1/a2';gtext'1/a3';gtext'1/a4';gtext'1/a5'; a=maxa1;af=asinmaxFt1-Ff-Fw1/G;C=tanaf/a/L+hgtanaf/L;disp'假设后轮驱动,最大爬坡度相应的附着率=';dispC;假设后轮驱动,最大爬坡度相应的附着率=4 >>clearnT=;r=;f=;CDA=;i0=;If=;Iw1=;Iw2=;L=;a=;hg=;m=3880;g=;G=mg; ig= ;nmin=600;nmax=4000;u1=rnmin./ig/i0;u2=rnmax./ig/i0;deta=0ig;for i=1:5detai=1+Iw1+Iw2/mr^2+Ifigi^2i0^2nT/mr^2;endua=6::99;N=lengthua;n=0;Tq=0;Ft=0;inv_a=0ua;delta=0ua; Ff=Gf;Fw=CDAua.^2/;for i=1:Nk=i;if uai<=u22n=uaiig2i0/r/;Tq=+n/1000n/1000^2+n/1000^n/1000^4;Ft=Tqig2i0nT/r;inv_ai=deta2m/Ft-Ff-Fwi;deltai=inv_ai/;elseif uai<=u23n=uaiig3i0/r/;Tq=+n/1000n/1000^2+n/1000^n/1000^4;Ft=Tqig3i0nT/r;inv_ai=deta3m/Ft-Ff-Fwi;deltai=inv_ai/;elseif uai<=u24n=uaiig4i0/r/;Tq=+n/1000n/1000^2+n/1000^n/1000^4;Ft=Tqig4i0nT/r;inv_ai=deta4m/Ft-Ff-Fwi;deltai=inv_ai/;elsen=uaiig5i0/r/;Tq=+n/1000n/1000^2+n/1000^n/1000^4;Ft=Tqig5i0nT/r;inv_ai=deta5m/Ft-Ff-Fwi;deltai=inv_ai/;enda=delta1:k;ti=suma;endplott,ua;axis0 80 0 100;title'汽车2档原地起步换挡加速时间曲线';xlabel'时间ts';ylabel'速度uakm/h';>> ginputans =所以汽车2档原地起步换挡加速行驶至70km/h 的加速时间约为已知货车装用汽油发动机的负荷特性与万有特性;负荷特性曲线的拟合公式为:44332210e e e e P B P B P B P B B b ++++=其中,b 为燃油消耗率g/kW h ;Pe 为发动机净功率kW ;拟合式中的系数随转速n 变化;怠速油耗s mL Q id /299.0=怠速转速400r/min;计算与绘制题中货车的1汽车功率平衡图;2最高档与次高档的等速百公里油耗曲线;或利用计算机求货车按JB3352-83规定的六工况循环行驶的百公里油耗;计算中确定燃油消耗值b 时,若发动机转速与负荷特性中给定的转速不相等,可由相邻转速的两根曲线用插值法求得;解:Matlab 程序:(1)汽车功率平衡图程序:clearn=600:10:4000;Tq=+n/1000n/1000.^2+n/1000.^n/1000.^4;m=3880;g=;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;ua1=rn/ig1/i0;ua2=rn/ig2/i0;ua3=rn/ig3/i0;ua4=rn/ig4/i0;ua5=rn/ig5/i0;Pe1=Tq.ig1i0.ua1./3600r;Pe2=Tq.ig2i0.ua2./3600r;Pe3=Tq.ig3i0.ua3./3600r;Pe4=Tq.ig4i0.ua4./3600r;Pe5=Tq.ig5i0.ua5./3600r;ua=0::119;Ff=Gf;Fw=CDAua.^2/;Pf=Ffua/3600;Pw=Fw.ua/3600;Pe0=Pf+Pw./nT;Pe=maxPe1;plotua1,Pe1,ua2,Pe2,ua3,Pe3,ua4,Pe4,ua5,Pe5,ua,Pe0,ua,Pe;axis0 119 0 100;title'汽车功率平衡图';xlabel'uakm/h';ylabel'Pekw';gtext'1',gtext'2',gtext'3',gtext'4',gtext'5',gtext'Pf+Pw/et',gt ext'Pe';2最高档与次高档的等速百公里油耗曲线程序:clearn=600:1:4000;m=3880;g=;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;n0=815 1207 1614 2012 2603 3006 3403 3804;B00= ;B10= ;B20= ;B30= ;B40= ;B0=splinen0,B00,n;B1=splinen0,B10,n;B2=splinen0,B20,n;B3=splinen0,B30,n;B4=splinen0,B40,n;Ff=Gf;ua4=rn/ig4/i0;ua5=rn/ig5/i0;Fz4=Ff+CDAua4.^2/;Fz5=Ff+CDAua5.^2/;Pe4=Fz4.ua4./nT1000;Pe5=Fz5.ua5./nT1000;for i=1:1:3401b4i=B0i+B1iPe4i+B2iPe4i.^2+B3iPe4i.^3+B4iPe4i.^4; b5i=B0i+B1iPe5i+B2iPe5i.^2+B3iPe5i.^3+B4iPe5i.^4; endpg=;Q4=Pe4.b4./.ua4.pg;Q5=Pe5.b5./.ua5.pg;plotua4,Q4,ua5,Q5;axis0 100 10 30;title'最高档与次高档等速百公里油耗曲线';xlabel'uakm/h';ylabel'百公里油耗L/100km';gtext'4',gtext'5';i为、、、、时的燃油经济性—加速时改变题中轻型货车的主减速器传动比,做出i值对汽车性能的影响;间曲线,讨论不同解:Matlab程序:主程序:i0=,,,,; %输入主传动比的数据for i=1:1:5yi=jiasushijiani0i; %求加速时间endy;for i=1:1:5bi=youhaoi0i; %求对应i0的六工况百公里油耗endb;plotb,y,'+r'hold onb1=linspaceb1,b5,100;y1=splineb,y,b1; %三次样条插值plotb1,y1; %绘制燃油经济性-加速时间曲线title'燃油经济性—加速时间曲线';xlabel'百公里油耗L/100km';ylabel'加速时间s';gtext'i0=',gtext'i0=',gtext'i0=',gtext'i0=',gtext'i0=';子程序:1 function y=jiasushijiani0 %求加速时间的处理函数n1=linspace0,5000; %先求各个档位的驱动力nmax=4000;nmin=600;r=;yita=;CDA=;f=;G=3880;ig=,,,;%i0=for i=1:1:4 %i为档数uamaxi=chesunmax,r,igi,i0; %计算各个档位的最大速度与最小速度uamini=chesunmin,r,igi,i0;uai,:=linspaceuamini,uamaxi,100;ni,:=zhuansuuai,:,r,igi,i0; %计算各个档位的转速范围 Ttqi,:=zhuanjuni,:; %求出各档位的转矩范围 Fti,:=qudongliTtqi,:,igi,i0,yita,r; %求出驱动力Fi,:=fG+CDAuai,:.^2/; %求出滚动阻力和空气阻力的和deltai,:=1+++igi^2i0^2yita/3880r^2; %求转动质量换算系数ai,:=1./deltai,:.3880./Fti,:-Fi,:; %求出加速度F2i,:=Fti,:-Fi,:;end%下面分各个档位进行积分,求出加速时间temp11,:=ua2,:/;temp12,:=1./a2,:;n1=1;for j1=1:1:100if ua3,j1>maxua2,:&&ua3,j1<=70temp21,n1=ua3,j1/;temp22,n1=1./a3,j1;n1=n1+1;endendn2=1;for j1=1:1:100if ua4,j1>maxua3,:&&ua4,j1<=70;temp31,n2=ua4,j1/;temp32,n2=1./a4,j1;n2=n2+1;endendy=temp11,1temp12,1+qiujitemp11,:,temp12,:+qiujitemp21,:,temp22,:+qiuj itemp31,:,temp32,:;end2 function ua=chesun,r,ig,i0; %由转速计算车速ua=r.n/igi0;3 function n=zhuansuua,r,ig,i0; %求转速n=igi0.ua./r;end4 function y=zhuanjun; %求转矩函数y=+.n./1000.n./1000.^2+.n./1000.^.n./1000.^4;5 function y=qudongliTtq,ig,i0,yita,r; %求驱动力函数y=igi0yita.Ttq/r;end6 function p=qiujix0,y0 %求积分函数n0=sizex0;n=n02;x=linspacex01,x0n,200 ;y=splinex0,y0,x; %插值% figure;plotx,y;p=trapzx,y ;end7 %求不同i0下的六工况油耗function b=youhaoi0;global f G CDA yita m r If Iw1 Iw2 pg B0 B1 B2 B3 B4 n %声明全局变量ig=,,,;r=;yita=;CDA=;f=;%i0=;G=3880;If=;Iw1=;Iw2=;m=3880; %汽车的基本参数设定n0=815 1207 1614 2012 2603 3006 3403 3804;B00= ;B10= ;B20= ;B30= ;B40= ;n=600:1:4000;B0=splinen0,B00,n;B1=splinen0,B10,n;B2=splinen0,B20,n; %使用三次样条插值,保证曲线的光滑连续B3=splinen0,B30,n;B4=splinen0,B40,n;ua4=r.n./i0ig4; %求出发动机转速范围内对应的III、IV档车速F4=fG+CDAua4.^2/; %求出滚动阻力和空气阻力的和P_fw4=F4.ua4./yita1000; %求出阻力功率for i=1:1:3401 %用拟合公式求出各个燃油消耗率b4i=B0i+B1iP_fw4i+B2iP_fw4i^2+B3iP_fw4i^3+B4iP_fw4i^4;endpg=; %汽油的重度取Lua4_m=25,40,50; %匀速阶段的车速s_m=50,250,250; %每段匀速走过的距离b4_m=splineua4,b4,ua4_m; %插值得出对应速度的燃油消耗率F4_m=fG+CDAua4_m.^2/; %车速对应的阻力P_fw4_m=F4_m.ua4_m./yita1000; %发动机功率Q4_m=P_fw4_m.b4_m.s_m./102.ua4_m.pg ; Q4_a1=jiasu40,25,ig4,,ua4,i0; Q4_a2=jiasu50,40,ig4,,ua4,i0; Qid=;tid=;s=1075;Q_i=Qidtid; %求出减速阶段的燃油消耗量 Q4all=sumQ4_m+Q4_a1+Q4_a2+Q_i100/s; %IV 档六工况百公里燃油消耗量 b=Q4all;8加速阶段处理函数function q=jiasuumax,umin,ig,a,ua0,i0;global f G CDA yita m r If Iw1 Iw2 pg B0 B1 B2 B3 B4 n; %i0 ; ua1=umin:1:umax; %把速度范围以1km/h 为间隔进行划分 delta=1+Iw1+Iw2/mr^2+Ifig^2i0^2yita/mr^2;P0=Gf.ua0./3600+CDA.ua0.^3/76140+deltam.ua0/3600a/yita; P=Gf.ua1/3600+CDA.ua1.^3/76140+deltam.ua1/3600a/yita; dt=1/a ; %速度每增加1km/h 所需要的时间for i=1:1:3401 %重新利用拟合公式求出b 与ua 的关系 b0i=B0i+B1iP0i+B2iP0i^2+B3iP0i^3+B4iP0i^4; endb1=interp1ua0,b0,ua1; %插值出各个速度节点的燃油消耗率 Qt=P.b1./.pg; %求出各个速度节点的燃油消耗率 i1=sizeQt; i=i12;Qt1=Qt2:i-1;q=Qt1+Qtidt./2+sumQt1dt; %求该加速阶段的燃油消耗量2)求行驶车速Ua =30km/h,在ϕ=路面上车轮不抱死的制动距离;计算时取制动系反应时间'2τ=,制动减速度上升时间''2τ=;3)求制动系前部管路损坏时汽车的制动距离s,制动系后部管路损坏时汽车的制动距离's ; 解:Matlab 程序: (1) 求利用附着系数曲线和制动效率曲线程序: cleark=4080;hgk=;Lk=;ak=;betak=;bk=Lk-ak;%空载时的参数 mm=9290;hgm=;Lm=;am=;betam=;bm=Lm-am;%满载时的参数 z=0::; figure1; fai=z;fai_fk=betakzLk./bk+zhgk;%空载时前轴的φffai_fm=betamzLm./bm+zhgm;%满载时前轴的φffai_rk=1-betakzLk./ak-zhgk;%空载时后轴的φrfai_rm=1-betamzLm./am-zhgm;%满载时后轴的φrplotz,fai_fk,'b--',z,fai_fm,'r',z,fai_rk,'b--',z,fai_rm,'r',z,fai,' k';title'利用附着系数与制动强度的关系曲线';xlabel'制动强度z/g';ylabel'利用附着系数φ';gtext'φr空载',gtext'φr满载',gtext'φ=z',gtext'φf空载',gtext'φf 满载';figure2;Efk=z./fai_fk100;%空载时前轴的制动效率Efm=z./fai_fm100;Erk=z./fai_rk100;Erm=z./fai_rm100;plotfai_fk,Efk,'b',fai_fm,Efm,'r',fai_rk,Erk,'b',fai_rm,Erm,'r'; axis0 1 0 100;title'前.后制动效率曲线';xlabel'附着系数φ';ylabel'制动效率%';gtext'Ef',gtext'Er',gtext'Er',gtext'满载',gtext'空载';(2)问和3问程序:clearmk=4080;hgk=;Lk=;ak=;betak=;bk=Lk-ak;%空载时的参数mm=9290;hgm=;Lm=;am=;betam=;bm=Lm-am;%满载时的参数z=0::1;fai_fk=betakzLk./bk+zhgk;%空载时前轴的φffai_fm=betamzLm./bm+zhgm;%满载时前轴的φffai_rk=1-betakzLk./ak-zhgk;%空载时后轴的φrfai_rm=1-betamzLm./am-zhgm;%满载时后轴的φrEfk=z./fai_fk100;%空载时前轴的制动效率Efm=z./fai_fm100;Erk=z./fai_rk100;Erm=z./fai_rm100;t1=;t2=;ua0=30;fai=;g=;ak1=Erk81gfai/100;am1=Erm81gfai/100;Sk1=t1+t2/2ua0/+ua0^2/ak1;%制动距离Sm1=t1+t2/2ua0/+ua0^2/am1;disp'空载时,汽车制动距离Sk1=';dispSk1;disp'满载时,汽车制动距离Sm1=';dispSm1;ak2=faigak/Lk+faihgk; am2=faigam/Lm+faihgm; ak3=faigbk/Lk-faihgk; am3=faigbm/Lk-faihgm;Sk2=t1+t2/2ua0/+ua0^2/ak2;%制动距离 Sm2=t1+t2/2ua0/+ua0^2/am2; Sk3=t1+t2/2ua0/+ua0^2/ak3; Sm3=t1+t2/2ua0/+ua0^2/am3;disp'空载时,前制动器损坏,汽车制动距离Sk2='; dispSk2;disp'满载时,前制动器损坏,汽车制动距离Sm2='; dispSm2;disp'空载时,后制动器损坏,汽车制动距离Sk3='; dispSk3;disp'满载时,后制动器损坏,汽车制动距离Sm3='; dispSm3;空载时,汽车制动距离Sk1=满载时,汽车制动距离Sm1=空载时,前制动器损坏,汽车制动距离Sk2=满载时,前制动器损坏,汽车制动距离Sm2=空载时,后制动器损坏,汽车制动距离Sk3=满载时,后制动器损坏,汽车制动距离Sm3=二自由度轿车模型的有关参数如下:总质量 m=绕Oz 轴转动惯量 23885m kg I z ⋅= 轴距 L= 质心至前轴距离 a= 质心至后轴距离 b=前轮总侧偏刚度 k 1=-62618N/rad 后轮总侧偏刚度 k 2=-110185N/rad 转向系总传动比 i=20 试求:1) 稳定性因数K 、特征车速u ch ; 2) 稳态横摆角速度增益曲线asr u -⎪⎭⎫δω、车速u=s 时的转向灵敏度sw rδω;3) 静态储备系数.,侧向加速度为时的前、后轮侧偏角绝对值之差21αα-与转弯半径的比值R/R 0R 0=15m;4) 车速u=s 时,瞬态响应的横摆角速度波动的固有圆频率0ω、阻尼比ζ、反应时间τ与峰值反应时间ε解:Matlab 程序: m=;Iz=3885;L=;a=;b=;k1=-62618;k2=-110185; i=20;g=;R0=15;u1=; K=ma/k2-b/k1/L^2; Uch=1/K^1/2;%特征车速disp'稳定性因数s^2/m^2K='; dispK;disp'特征车速m/sUch='; dispUch; u=0::30;S=u./L1+Ku.^2;%稳态横摆角速度增益 plotu,S;title'汽车稳态横摆角速度增益曲线'; xlabel'车速um/s';ylabel'稳态横摆角速度增益'; disp'u=s 时,转向灵敏度为'; dispS448;SM=k2/k1+k2-a/L; ay=g; A=KayL; B=L/R0; R=L/B-A;C=R/R0;%转弯半径比 disp'静态储备系数.='; dispSM;disp'侧向加速度为时前、后轮侧偏角绝对值之差rad a1-a2='; dispA;disp'侧向加速度为时转弯半径比值R/R0='; dispC;W0=L/u1k1k2/mIz1+Ku1^2^1/2;%固有圆频率D=-mk1a^2+k2b^2-Izk1+k2/2LmIzk1k21+Ku1^2^1/2;%阻尼比 t=atan1-D^2^1/2/-mu1aW0/Lk2-D/W01-D^2^1/2;%反应时间 E=atan1-D^2^1/2/D/W01-D^2^1/2+t;%峰值反应时间 disp'车速u=s 时的瞬态响应参数分别为:'; disp'横摆角速度波动的固有圆频率rad 为 '; dispW0;disp'阻尼比为'; dispD;disp'反应时间s 为'; dispt;disp'峰值反应时间s 为'; dispE;稳定性因数s^2/m^2K=特征车速m/sUch=u=s 时,转向灵敏度为静态储备系数.=侧向加速度为时前、后轮侧偏角绝对值之差rad a1-a2=侧向加速度为时转弯半径比值R/R0=车速u=s 时的瞬态响应参数分别为: 横摆角速度波动的固有圆频率rad 为阻尼比为反应时间s 为峰值反应时间s 为车身-车轮双质量系统参数:10,9,25.0,5.10====μγζHz f ;“人体-座椅”系统参数:25.0,3==s s Hz f ζ;车速s m u /20=,路面不平度系数()3801056.2m n G q -⨯=,参考空间频率n 0=;计算时频率步长Hz f 2.0=∆,计算频率点数180=N ;1) 计算并画出幅频特性q z /1、12/z z 、2/z q 和均方根值谱()f G z 1 、()f G z 2 、()f G a 谱图;进一步计算aw w a zz q L a 、、、、、σσσσ21 值 2) 改变“人体-座椅”系统参数:5.0~125.0,6~5.1==s s Hz f ζ;分析aw w L a 、值随s s f ζ、的变化;3) 分别改变车身-车轮双质量系统参数:5.0~125.0,3~25.00==ζHz f ,20~5,18~5.4==μγ;绘制GFd fd z /2σσσ、、 三个响应量均方根值随以上四个系统参数变化的曲线; 解:Matlab 程序 1问yps=;%阻尼比ζ gama=9;%刚度比γ mu=10;%质量比μfs=3;ypss=;g=;a0=10^-6;f0=; ua=20;Gqn0=10^-8;n0=;detaf=;N=180; f=detaf0:N;lamta=f/f0;lamtas=f/fs;Wf=0f;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z1_q=gamasqrt1-lamta.^2.^2+4yps^2lamta.^2./deta;z2_z1=sqrt1+4yps^2lamta.^2./1-lamta.^2.^2+4yps^2lamta.^2; p_z2=sqrt1+2ypsslamtas.^2./1-lamtas.^2.^2+2ypsslamtas.^2; z2_q=gamasqrt1+4yps^2lamta.^2./deta; p_q=p_z2.z2_q;jfg_Gqddf=4pi^2sqrtGqn0n0^2uaf; jfg_Gzdd1f=z1_q.jfg_Gqddf; jfg_Gzdd2f=z2_q.jfg_Gqddf; jfg_Gaf=p_q.jfg_Gqddf;sigmaqdd=sqrttrapzf,jfg_Gqddf.^2;%路面不平度加速度均方根值 sigmazdd1=sqrttrapzf,jfg_Gzdd1f.^2;%车轮加速度均方根值 sigmazdd2=sqrttrapzf,jfg_Gzdd2f.^2;%车身加速度均方根值 sigmaa=sqrttrapzf,jfg_Gaf.^2;%人体加速度均方根值 for i=1:N+1 if fi<=2 Wfi=; elseif fi<=4 Wfi=fi/4; elseif fi<= Wfi=1; elseWfi=fi; end endkk=Wf.^2.jfg_Gaf.^2;aw=sqrttrapzf,kk;%加权加速度均方根值 Law=20log10aw/a0;%加权振级disp'路面不平度加速度均方根值为';dispsigmaqdd; disp'车轮加速度均方根值为';dispsigmazdd1; disp'车身加速度均方根值为';dispsigmazdd2; disp'人体加速度均方根值为';dispsigmaa;disp'加权加速度均方根值为';dispaw;disp'加权振级';dispLaw;figure1plotf,z1_q,title'幅频特性|z1/q|, f=, ζ=,γ=9,μ=10',xlabel'激振频率f/Hz',ylabel'|z1/q|';figure2plotf,z2_z1,title'幅频特性|z2/z1|,f=, ζ=,γ=9,μ=10',xlabel'激振频率f/Hz',ylabel'|z2/z1|';figure3plotf,p_z2,title'幅频特性|p/z2|,fs=, ζs=',xlabel'激振频率f/Hz',ylabel'|p/z2|';figure4plotf,jfg_Gzdd1f,title'车轮加速度均方根值√Gz1f谱图',xlabel'激振频率f/Hz',ylabel'√Gz1f';figure5plotf,jfg_Gzdd2f,title'车身加速度均方根值√Gz2f谱图',xlabel'激振频率f/Hz',ylabel'√Gz2f';figure6plotf,jfg_Gaf,title'人体加速度均方根值√Gaf谱图',xlabel'激振频率f/Hz',ylabel'√Gaf';路面不平度加速度均方根值为车轮加速度均方根值为车身加速度均方根值为人体加速度均方根值为加权加速度均方根值为加权振级2问程序1:cleargama=9;%刚度比γmu=10;%质量比μf0=;g=;a0=10^-6;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f=detaf0:N;lamta=f/f0;Wf=0f;for i=1:N+1if fi<=2Wfi=;elseif fi<=4Wfi=fi/4;elseif fi<=Wfi=1;elseWfi=fi;endendfs=3;ypss=;ypss0=::;a=0ypss0;La=0ypss0;M=lengthypss0;for i=1:Myps=ypss0i;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;p_z2=sqrt1+2ypsslamtas.^2./1-lamtas.^2.^2+2ypsslamtas.^2;z2_q=gamasqrt1+4yps^2lamta.^2./deta;p_q=p_z2.z2_q;jfg_Gqddf=4pi^2sqrtGqn0n0^2uaf;jfg_Gaf=p_q.jfg_Gqddf;kk=Wf.^2.jfg_Gaf.^2;awi=sqrttrapzf,kk;endLaw=20log10aw/a0;figure1plotypss0,aw;title'aw随ζs的变化',xlabel'“人体—座椅”系统的阻尼比ζs',ylabel'aw/ms^-2';figure2plotypss0,Law;title'Law随ζs的变化',xlabel'“人体—座椅”系统的阻尼比ζs',ylabel'Law/dB';程序2:clearyps=;%阻尼比ζgama=9;%刚度比γmu=10;%质量比μf0=;g=;a0=10^-6;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f=detaf0:N;lamta=f/f0;Wf=0f;for i=1:N+1if fi<=2Wfi=;elseif fi<=4Wfi=fi/4;elseif fi<=Wfi=1;elseWfi=fi;endendypss=;fs=::6;M=lengthfs;for i=1:Mfs0=fsi;lamtas=f/fs0;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;p_z2=sqrt1+2ypsslamtas.^2./1-lamtas.^2.^2+2ypsslamtas.^2;z2_q=gamasqrt1+4yps^2lamta.^2./deta;p_q=p_z2.z2_q;jfg_Gqddf=4pi^2sqrtGqn0n0^2uaf;jfg_Gaf=p_q.jfg_Gqddf;kk=Wf.^2.jfg_Gaf.^2;awi=sqrttrapzf,kk;endLaw=20log10aw/a0;figure3plotfs,aw;title'aw随fs的变化',xlabel'“人体—座椅”系统的固有频率fs',ylabel'aw/ms^-2';figure4plotfs,Law;title'Law随fs的变化',xlabel'“人体—座椅”系统的固有频率fs',ylabel'Law/dB';3问程序1:clearfigure1fs=3;yps_s=;g=;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f0=;yps=;gama=9;mu=10;ff0=::3;sigmaz2=0ff0;sigmafd=0ff0;sigmaFd_G=0ff0;M=lengthff0;for i=1:Mf0=ff0i;f=detaf0:N;lamta=f/f0;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z2_qdot=2pifgama.sqrt1+4yps^2lamta.^2./deta;fd_qdot=gamalamta.^2./2pif+eps./sqrtdeta;Fd_Gqdot=2pifgama/g.sqrtlamta.^2/mu+1-1.^2+4yps^2lamta.^2./deta;Gq_dotf=4pi^2Gqn0n0^2ua;Gz2f=z2_qdot.^2Gq_dotf;Gfd_qf=fd_qdot.^2Gq_dotf;GFd_Gf=Fd_Gqdot.^2Gq_dotf;sigmaz2i=sqrttrapzf,Gz2f;sigmafdi=sqrttrapzf,Gfd_qf;sigmaFd_Gi=sqrttrapzf,GFd_Gf;if f0==sgmz2=sigmaz2i;sgmfd=sigmafdi;sgmFd_G=sigmaFd_Gi;endendsz2=20log10sigmaz2/sgmz2;sfd=20log10sigmafd/sgmfd;sFd_G=20log10sigmaFd_G/sgmFd_G;plotff0,sz2,'r-',ff0,sfd,'b-.',ff0,sFd_G,'k--';axis 3 -25 15;title'三个响应量均方根值随f0变化的曲线',xlabel'车身部分固有频率f0/Hz',ylabel'σz2/dB,σfd/dB,σFd/G/dB';程序2:clearfigure2fs=3;yps_s=;g=;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f0=;yps=;gama=9;mu=10;c= i=1:Myps=yps0i;f=detaf0:N;lamta=f/f0;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z2_qdot=2pifgama.sqrt1+4yps^2lamta.^2./deta;fd_qdot=gamalamta.^2./2pif+eps./sqrtdeta;Fd_Gqdot=2pifgama/g.sqrtlamta.^2/mu+1-1.^2+4yps^2lamta.^2./deta;Gq_dotf=4pi^2Gqn0n0^2ua;Gz2f=z2_qdot.^2Gq_dotf;Gfd_qf=fd_qdot.^2Gq_dotf;GFd_Gf=Fd_Gqdot.^2Gq_dotf;sigmaz2i=sqrttrapzf,Gz2f;sigmafdi=sqrttrapzf,Gfd_qf;sigmaFd_Gi=sqrttrapzf,GFd_Gf;if yps==sgmz2=sigmaz2i;sgmfd=sigmafdi;sgmFd_G=sigmaFd_Gi;endendsz2=20log10sigmaz2/sgmz2;sfd=20log10sigmafd/sgmfd;sFd_G=20log10sigmaFd_G/sgmFd_G;plotyps0,sz2,'r-',yps0,sfd,'b-.',yps0,sFd_G,'k--';axis -4 4;title'三个响应量均方根值随ζ变化的曲线',xlabel'车身部分阻尼比ζ',ylabel'σz2/dB,σfd/dB,σFd/G/dB';程序3:clearfigure3fs=3;yps_s=;g=;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f0=;yps=;mu=10;gama0=4::19;sigmaz2=0gama0;sigmafd=0gama0;sigmaFd_G=0gama0;M=lengthgama0;for i=1:Mgama=gama0i;f=detaf0:N;lamta=f/f0;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z2_qdot=2pifgama.sqrt1+4yps^2lamta.^2./deta;fd_qdot=gamalamta.^2./2pif+eps./sqrtdeta;Fd_Gqdot=2pifgama/g.sqrtlamta.^2/mu+1-1.^2+4yps^2lamta.^2./deta;Gq_dotf=4pi^2Gqn0n0^2ua;Gz2f=z2_qdot.^2Gq_dotf;Gfd_qf=fd_qdot.^2Gq_dotf;GFd_Gf=Fd_Gqdot.^2Gq_dotf;sigmaz2i=sqrttrapzf,Gz2f;sigmafdi=sqrttrapzf,Gfd_qf;sigmaFd_Gi=sqrttrapzf,GFd_Gf;if gama==9sgmz2=sigmaz2i;sgmfd=sigmafdi;sgmFd_G=sigmaFd_Gi;endendsz2=20log10sigmaz2/sgmz2;sfd=20log10sigmafd/sgmfd;sFd_G=20log10sigmaFd_G/sgmFd_G;plotgama0,sz2,'r-',gama0,sfd,'b-.',gama0,sFd_G,'k--';axis4 18 -5 6;title'三个响应量均方根值随γ变化的曲线',xlabel'悬架与轮胎的刚度比γ',ylabel'σz2/dB,σfd/dB,σFd/G/dB';程序4:clearfigure4fs=3;yps_s=;g=;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f0=;yps=;gama=9;mu0=5::20;sigmaz2=0mu0;sigmafd=0mu0;sigmaFd_G=0mu0;M=lengthmu0;for i=1:Mmu=mu0i;f=detaf0:N;lamta=f/f0;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z2_qdot=2pifgama.sqrt1+4yps^2lamta.^2./deta;fd_qdot=gamalamta.^2./2pif+eps./sqrtdeta;Fd_Gqdot=2pifgama/g.sqrtlamta.^2/mu+1-1.^2+4yps^2lamta.^2./deta;Gq_dotf=4pi^2Gqn0n0^2ua;Gz2f=z2_qdot.^2Gq_dotf;Gfd_qf=fd_qdot.^2Gq_dotf;GFd_Gf=Fd_Gqdot.^2Gq_dotf;sigmaz2i=sqrttrapzf,Gz2f;sigmafdi=sqrttrapzf,Gfd_qf;sigmaFd_Gi=sqrttrapzf,GFd_Gf;if mu==10sgmz2=sigmaz2i;sgmfd=sigmafdi;sgmFd_G=sigmaFd_Gi;endendsz2=20log10sigmaz2/sgmz2;sfd=20log10sigmafd/sgmfd;sFd_G=20log10sigmaFd_G/sgmFd_G;plotmu0,sz2,'r-',mu0,sfd,'b-.',mu0,sFd_G,'k--';axis5 20 -2 2;title'三个响应量均方根值随μ变化的曲线',xlabel'车身与车轮部分质量比μ',ylabel'σz2/dB,σfd/dB,σFd/G/dB';。
汽车理论第五版_课后习题答案(正确)

第一章 汽车的动力性试说明轮胎滚动阻力的定义,产生机理和作用形式。
答:车轮滚动时,由于车轮的弹性变形、路面变形和车辙摩擦等原因所产生的阻碍汽车行驶的力称为轮胎滚动阻力。
产生机理和作用形式:(1)弹性轮胎在硬路面上滚动时,轮胎的变形是主要的,由于轮胎有内部摩擦,产生弹性迟滞损失,使轮胎变形时对它做的功不能全部回收。
由于弹性迟滞,地面对车轮的法向作用力并不是前后对称的,这样形成的合力z F 并不沿车轮中心(向车轮前进方向偏移a )。
如果将法向反作用力平移至与通过车轮中心的垂线重合,则有一附加的滚动阻力偶矩f z T F a =⋅。
为克服该滚动阻力偶矩,需要在车轮中心加一推力P F 与地面切向反作用力构成一力偶矩。
(2)轮胎在松软路面上滚动时,由于车轮使地面变形下陷,在车轮前方实际形成了具有一定坡度的斜面,对车轮前进产生阻力。
(3)轮胎在松软地面滚动时,轮辙摩擦会引起附加阻力。
(4)车轮行驶在不平路面上时,引起车身振荡、减振器压缩和伸长时做功,也是滚动阻力的作用形式。
滚动阻力系数与哪些因素有关答:滚动阻力系数与路面的种类、行驶车速以及轮胎的构造、材料和气压有关。
这些因素对滚动阻力系数的具体影响参考课本P9。
"确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h 的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h 的加速时间。
轻型货车的有关数据:汽油发动机使用外特性的Tq-n 曲线的拟合公式为23419.313295.27()165.44()40.874() 3.8445()1000100010001000q n n n n T =-+-+-式中,Tq 为发动机转矩(N •m );n 为发动机转速(r/min )。
汽车动力性matlab仿真源程序
汽车动力性matlab仿真源程序clcn=[1500:500:5500];%转速范围T=[78.59 83.04 85.01 86.63 87.09 85.87 84.67 82.50 80.54];%对应各转矩dt=polyfit(n,T,3);%对发动机输出转矩特性进行多项式拟合,阶数取4n1=1000:100:5500;%t=polyval(dt,n1);figure(1)title('发动机外特性')plot(n1,t,n,T,'o'),grid on%图示发动机输出转矩特性%汽车驱动力计算G=input('整车重力/N,G=');%输入970*9.8ig=[3.416 1.894 1.28 0.914 0.757];%变速器速比k=1:5;%5个前进档r=0.272;i0=4.388;eta=0.9;ngk=[800 800 800 800 800];ngm=[5500 5500 5500 5500 5500];ugk=0.377.*r.*ngk(k)./(ig(k).*i0);%计算每一档发动机800rpm 时的最低行驶速度ugm=0.377.*r.*ngm(k)./(ig(k).*i0);%计算每一档发动机5400rpm最高行驶速度for k=1:5%依次计算5个档的驱动力u=ugk(k):ugm(k);n=ig(k)*i0.*u./r/0.377;t=54.8179+2.2441.*(n./100)-4.8003.*(n./1000).^2+2.815e-10.*n.^3Ft=t.*ig(k).*i0*eta/r;figure(2)plot(u,Ft)hold on,grid on %保证K的每次循环的图形都保留显示end%行驶阻力计算f0=0.009;f1=0.002;f4=0.0003;%三者都是轿车滚动阻力系数% disp'空气阻力系数Cd=0.3--0.41,迎风面积A=1.7--2.1'Cd=input('空气阻力系数Cd=');%输入0.3A=input('迎风面积/m2,A=');%输入2.3u=0:10:180;f=f0+f1.*(u./100)+f4.*(u./100).^4;Ff=G*f;%计算滚动阻力Fw=Cd*A.*u.^2./21.15;%计算空气阻力F=Ff+Fw;%滚动阻力、空气阻力之和title('驱动力-阻力图(五档速比为3.416 1.894 1.28 0.914 0.757)')plot(u,F,'mo-');grid on%图解法求最高车速for u=50:180;k=5;n=ig(k)*i0.*u./r/0.377;t=54.8179+2.2441.*(n./100)-4.8003.*(n./1000).^2+2.815e-10.*n.^3;Ft=t.*ig(k).*i0*eta/r;f=f0+f1.*(u./100)+f4.*(u./100).^4;Ff=G*f;Fw=Cd*A.*u.^2./21.15;F=Ff+Fw;if abs(Ft-F)<1;umax=u;breakendenddisp('== == =汽车动力性能仿真计算结果== == =')disp('驱动力-行驶阻力平衡图及最高车速')fprintf('汽车理论最高车速(驱动力与行驶阻力曲线交点)Vmax=%3.3f km/h\n',umax)(注:文档可能无法思考全面,请浏览后下载,供参考。
毕业设计(论文)-基于Matlab的汽车动力性与经济性分析计算

提供全套毕业论文图纸,欢迎咨询编号毕业设计(论文)题目基于Matlab的汽车动力性与经济性分析计算二级学院专业车辆工程班级学生姓名学号指导教师职称时间目录摘要 (I)Abstract (II)1绪论 (1)1.1选题背景 (1)1.2国内外汽车动力性经济性仿真研究发展过程与现状 (2)1.3课题研究主要内容与意义 (3)2汽车动力性经济性计算中发动机模拟的理论基础 (5)2.1发动机数学模型的建立 (5)2.1.1发动机外特性 (5)2.1.2发动机万有特性 (8)2.2本章小结 (10)3汽车动力性模拟计算 (12)3.1汽车最高车速的计算 (13)3.2加速时间的计算 (16)3.2.1原地起步加速时间 (17)3.2.2超车加速时间 (19)3.3最大爬坡度的计算 (19)3.4各档动力因数的计算 (21)3.5小结 (23)4汽车燃油经济性模拟计算 (24)4.1汽车燃油经济性的评价指标 (24)4.2不同行驶工况的汽车燃油经济性计算 (25)4.2.1等速工况 (25)4.2.2加速工况 (25)4.2.3减速工况 (27)4.2.4怠速工况 (27)4.2.5多工况循环百公里油耗 (27)4.3等速行驶工况的汽车燃油经济性计算 (27)4.4影响汽车燃油经济性的因素 (31)4.5小结 (38)5动力性和燃油经济性的参数敏感性分析 (39)5.1汽车动力性的参数敏感度分析 (39)5.2汽车燃油经济性的灵敏度分析 (40)5.3本章小结 (42)6结论 (44)致谢 (46)参考文献 (47)附录 (49)附录一 (49)附录二 (51)附录三 (62)附录四 (68)文献综述 (85)摘要本文首先利用了最小二乘法和回归分析法对所给试验数据拟合,得到了一个函数化的发动机外特性模型和万有特性模型,为后文汽车动力与燃油经济性的仿真奠定了基础。
然后,我们建立了汽车的动力性数学模型,详细分析了汽车动力性的几个评价指标,给出各个指标的计算方法及计算公式,并绘制出汽车的动力特性图,在完成动力性仿真分析之后,我们建立了汽车燃油经济性的数学模型,分析不同工况下汽车的燃油经济性并重点分析等速百公里的燃油消耗量,得到不同档位下不同车速的等速百公里燃油消耗量,并从汽车的使用方面和汽车结构方面详细的分析了影响汽车燃油经济性的因素。
汽车性能仿真计算实验实验报告

汽车性能仿真计算实验实验报告实验⼀汽车动⼒性仿真计算实验⽬的1.掌握汽车动⼒性评价指标和评价⽅法2.学会使⽤matlab 对汽车动⼒性指标进⾏计算实验内容1.学习汽车动⼒性理论2.编写计算程序3.绘制汽车动⼒性图形实验设备硬件环境:汽车虚拟仿真实验室软件环境:matlab2016a 及以上版本实验步骤1.学习汽车动⼒性理论2.编写计算程序3.绘制汽车动⼒性图形实验报告1. 运⽤matlab 解决《汽车理论》第⼀章习题1.31)绘制汽车驱动⼒与⾏驶阻⼒平衡图汽车驱动⼒Ft=ri i T to g tq η⾏驶阻⼒F f +F w +F i +F j =G ?f +2D 21.12A C a u +G ?i+dt dum δ发动机转速与汽车⾏驶速度之间的关系式为:0g i nr 0.377ua i ?= 由本题的已知条件,即可求得汽车驱动⼒和⾏驶阻⼒与车速的关系,编程即可得到汽车驱动⼒与⾏驶阻⼒平衡图。
2)求汽车最⾼车速,最⼤爬坡度及克服该坡度时相应的附着率①由1)得驱动⼒与⾏驶阻⼒平衡图,汽车的最⾼车速出现在5档时汽车的驱动⼒曲线与⾏驶阻⼒曲线的交点处,Ua max =99.08m/s 2。
②汽车的爬坡能⼒,指汽车在良好路⾯上克服w f F F +后的余⼒全部⽤来(等速)克服坡度阻⼒时能爬上的坡度,此时0=dt du,因此有()w f t i F F F F +-=,可得到汽车爬坡度与车速的关系式:()+-=G F F F i w f t arcsin tan ;⽽汽车最⼤爬坡度为Ⅰ档时的最⼤爬坡度。
利⽤MATLAB 计算可得,352.0max =i 。
③如是前轮驱动,1?C =qb hg q L L -;相应的附着率1?C 为1.20,不合理,舍去。
如是后轮驱动,2?C =qa hg q L L+;相应的附着率2?C 为0.50。
3)绘制汽车⾏驶加速度倒数曲线,求加速时间利⽤MATLAB 画出汽车的⾏驶加速度图和汽车的加速度倒数曲线图:忽略原地起步时的离合器打滑过程,假设在初时刻时,汽车已具有Ⅱ档的最低车速。
matlab 汽车运动学模型代码

matlab 汽车运动学模型代码1.引言1.1 概述概述部分的内容可以为:在汽车工程领域,汽车运动学模型是一个重要的研究方向。
它涉及到分析和描述汽车在运动过程中的运动规律和行为。
汽车运动学模型的研究可以帮助我们更好地理解汽车的运动特性,为汽车工程师设计和优化汽车的操控性能提供指导与支持。
汽车运动学模型主要包括了对汽车的运动状态进行建模和分析。
其中,汽车的运动状态涵盖了位置、速度、加速度等方面的信息。
通过建立合理的数学模型,可以对汽车运动状态进行预测和模拟,从而帮助我们更好地了解汽车的运动规律。
在以往的研究中,许多学者和工程师都致力于开发不同类型的汽车运动学模型。
这些模型可以根据不同的需求和目的,选择不同的理论和方法进行建立和求解。
例如,有基于物理力学原理的模型,也有基于统计学和数据拟合的模型。
这些模型经过严密的理论推导和实验验证,为我们对汽车运动学的研究提供了宝贵的参考和指导。
在本文中,我们将详细介绍一种基于MATLAB的汽车运动学模型实现方法。
通过使用MATLAB编程语言和相关工具包,我们可以方便地建立和求解汽车运动学模型,并获取到汽车的运动状态信息。
这将有助于我们更好地理解和分析汽车的运动特性,为汽车的设计和操控性能优化提供参考和支持。
总之,汽车运动学模型是一个重要而有挑战的研究领域。
通过建立合理的模型和使用有效的求解方法,我们可以更好地理解和分析汽车的运动行为,为汽车工程提供重要的参考依据。
在接下来的内容中,我们将详细介绍如何使用MATLAB实现汽车运动学模型,并展望其未来的发展前景。
1.2文章结构本文主要介绍了利用MATLAB实现汽车运动学模型的代码。
本文将分为引言、正文和结论三个部分进行阐述。
引言部分包括概述、文章结构和目的三个小节。
在概述部分,我们将介绍汽车运动学模型的背景和意义,指出该模型对于汽车控制和驾驶过程的理解具有重要作用。
在文章结构部分,我们将详细描述本文的布局和内容安排,以便读者可以更好地理解文章的整体结构。
汽车理论课后习题MATLAB编程-武汉理工版
汽车理论课后习题MATLAB编程1.3 确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间。
解:(1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;ua=[0:5:120];Ff=G*f;Fw=CDA*ua.^2/21.15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw');zoom on;[x,y]=ginput(1);zoom off;disp('汽车最高车速=');disp(x);disp('km/h');汽车最高车速=99.3006km/h(2)求汽车最大爬坡度程序:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;Ff=G*f;Fw1=CDA*ua1.^2/21.15;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100*tan(asin(max(Fi1/G)));disp('汽车最大爬坡度=');disp(imax);disp('%');汽车最大爬坡度=35.2197%(3)求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;Fw1=CDA*ua1.^2/21.15;Fw2=CDA*ua2.^2/21.15;Fw3=CDA*ua3.^2/21.15;Fw4=CDA*ua4.^2/21.15;Fw5=CDA*ua5.^2/21.15;Ff=G*f;deta1=1+(Iw1+Iw2)/(m*r^2)+(If*ig(1)^2*i0^2*nT)/(m*r^2);deta2=1+(Iw1+Iw2)/(m*r^2)+(If*ig(2)^2*i0^2*nT)/(m*r^2);deta3=1+(Iw1+Iw2)/(m*r^2)+(If*ig(3)^2*i0^2*nT)/(m*r^2);deta4=1+(Iw1+Iw2)/(m*r^2)+(If*ig(4)^2*i0^2*nT)/(m*r^2);deta5=1+(Iw1+Iw2)/(m*r^2)+(If*ig(5)^2*i0^2*nT)/(m*r^2);a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1./a1;a2=(Ft2-Ff-Fw2)/(deta2*m);ad2=1./a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1./a3;a4=(Ft4-Ff-Fw4)/(deta4*m);ad4=1./a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1./a5;plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis([0 99 0 10]);title('汽车的加速度倒数曲线');xlabel('ua(km/h)');ylabel('1/a');gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext('1/a5');a=max(a1);af=asin(max(Ft1-Ff-Fw1)/G);C=tan(af)/(a/L+hg*tan(af)/L);disp('假设后轮驱动,最大爬坡度相应的附着率=');disp(C);假设后轮驱动,最大爬坡度相应的附着率=0.4219(4) >>clearnT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;L=3.2;a=1.947;hg=0.9;m=3880;g=9.8;G=m*g; ig=[5.56 2.769 1.644 1.00 0.793];nmin=600;nmax=4000;u1=0.377*r*nmin./ig/i0;u2=0.377*r*nmax./ig/i0;deta=0*ig;for i=1:5deta(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(ig(i))^2*i0^2*nT)/(m*r^2);endua=[6:0.01:99];N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;Ff=G*f;Fw=CDA*ua.^2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(ig(2)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(2)*i0*nT/r;inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(3)n=ua(i)*(ig(3)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(3)*i0*nT/r;inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(4)n=ua(i)*(ig(4)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(4)*i0*nT/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elsen=ua(i)*(ig(5)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(5)*i0*nT/r;inv_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([0 80 0 100]);title('汽车2档原地起步换挡加速时间曲线');xlabel('时间t(s)');ylabel('速度ua(km/h)');>> ginputans =25.8223 70.073725.7467 70.0737所以汽车2档原地起步换挡加速行驶至70km/h的加速时间约为25.8s2.7已知货车装用汽油发动机的负荷特性与万有特性。
基于matlab来确定一轻型五档货车的动力性

确定以轻型五档货车的动力性:解:1.绘制汽车驱动力与行驶阻力平衡图Matlab 编写程序如下n=600:4000; r=0.367; nt=0.85; f=0.013; CA=2.77; io=5.83; m=3880; g=9.8; Tq=-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4;ig1=5.56; Ua1=0.377.*r.*n./(ig1.*io); Ft1=Tq.*ig1.*io.*nt./r;ig2=2.769; Ua2=0.377.*r.*n./(ig2.*io); Ft2=Tq.*ig2.*io.*nt./r;ig3=1.644; Ua3=0.377.*r.*n./(ig3.*io); Ft3=Tq.*ig3.*io.*nt./r;ig4=1.00; Ua4=0.377.*r.*n./(ig4.*io); Ft4=Tq.*ig4.*io.*nt./r;ig5=0.793; Ua5=0.377.*r.*n./(ig5.*io); Ft5=Tq.*ig5.*io.*nt./r;Fr=m.*g.*f+(CA/21.15).*Ua5.^2;plot(Ua1,Ft1,Ua2,Ft2,Ua3,Ft3,Ua4,Ft4,Ua5,Ft5,Ua5,Fr);02040608010012002000400060008000100001200014000Ua(Km/h)F t (K N )驱动力行驶阻力平衡图2.求最高车速,最大爬坡度及相应附着率2.1 最高车速Uamaxfunction Uamax=Uamax(Ua5)r=0.367; nt=0.85; f=0.013; CA=2.77; io=5.83; m=3880; g=9.8;ig5=0.793; n=Ua5.*ig5.*io./(0.377.*r);Tq=-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4;Ft5=Tq.*ig5.*io.*nt./r;Fr=m.*g.*f+(CA/21.15).*Ua5.^2;Uamax=Ft5-Fr;>> x=fzero(@Uamax,99)x =99.08342.2 最大爬坡度 imaxr=0.367; nt=0.85; f=0.013; CA=2.77; io=5.83; m=3880; g=9.8;Tq=-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4;ig1=5.56; Ua1=0.377.*r.*n./(ig1.*io);i=(Tq.*ig1.*io.*nt./r-m.*g.*f)./(m.*g);imax=m>> imaximax =0.33252.3 该爬坡度时的附着率Co>> a=1.947; L=3.2; hg=0.9; q=0.3325;Co=q./(a./L+hg.*q./L)Co =0.47373.绘制加速度倒数曲线,计算二档起步加速至70Km/s 的时间Matlab 编写程序如下n=600:4000; r=0.367; nt=0.85; f=0.013; CA=2.77; io=5.83; m=3880; g=9.8; Iw1=1.798; Iw2=3.598; If=0.218;Tq=-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4;ig1=5.56; Ua1=0.377.*r.*n./(ig1.*io); inv_a1=(m+(Iw1+Iw2)./r.^2+(If.*ig1.^2.*io.^2.*nt)./r.^2)./(Tq.*ig1.*io.*nt./r-m.*g.*f-(CA./21.15).*Ua1.^2);ig2=2.769; Ua2=0.377.*r.*n./(ig2.*io);inv_a2=(m+(Iw1+Iw2)./r.^2+(If.*ig2.^2.*io.^2.*nt)./r.^2)./(Tq.*ig2.*io.*nt./r-m.*g.*f-(CA./21.15).*Ua2.^2);ig3=1.644; Ua3=0.377.*r.*n./(ig3.*io); inv_a3=(m+(Iw1+Iw2)./r.^2+(If.*ig3.^2.*io.^2.*nt)./r.^2)./(Tq.*ig3.*io.*nt./r-m.*g.*f-(CA./21.15).*Ua3.^2);ig4=1.00; Ua4=0.377.*r.*n./(ig4.*io); inv_a4=(m+(Iw1+Iw2)./r.^2+(If.*ig4.^2.*io.^2.*nt)./r.^2)./(Tq.*ig4.*io.*nt./r-m.*g.*f-(CA./21.15).*Ua4.^2);ig5=0.793; Ua5=0.377.*r.*n./(ig5.*io); inv_a5=(m+(Iw1+Iw2)./r.^2+(If.*ig5.^2.*io.^2.*nt)./r.^2)./(Tq.*ig5.*io.*nt./r-m.*g.*f-(CA./21.15).*Ua5.^2);axis([0 80 0 10]);plot(Ua1,inv_a1,Ua2,inv_a2,Ua3,inv_a3,Ua4,inv_a4,Ua5,inv_a5);01020304050607080012345678910Ua(Km/h)i n v a加速度倒数曲线求加速时间tr=0.367;io=5.83;n1=4000;nt=0.85;ig=[5.56 2.769 1.644 1.000.793];If=0.218;Iw1=1.798;Iw2=3.598;m=3880;g=9.8;f=0.013;CA=2.77;for i=1:2Ua=0.377.*r.*n1./(io.*ig(i)):0.00001:0.377.*r.*n1./(io.*ig(i+1));n=Ua.*io.*ig(i+1)./(0.377.*r);Tq=-19.313+295.27.*(n./1000)-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4;Ft=Tq.*ig(i+1).*io.*nt./r;Fw=m.*g.*f+(CA./21.15).*Ua.^2;p=1+(Iw1+Iw2+If.*ig(i+1).^2.*io.^2.*nt)./(m.*r.^2);inv_a=p.*m./(Ft-Fw);s=0;s=s+trapz(Ua,inv_a);endUa=0.377.*r.*n1./(io.*ig(3)):0.00001:70;n=Ua.*io.*ig(4)./(0.377.*r);Tq=-19.313+295.27.*(n./1000)-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4;Ft=Tq.*ig(4).*io.*nt./r;Fw=m.*g.*f+(CA./21.15).*Ua.^2;Iw1=1.798;Iw2=3.598;p=1+(Iw1+Iw2+If.*ig(4).^2.*io.^2.*nt)./(m.*r.^2); inv_a=p.*m./(Ft-Fw);acctime=(s+trapz(Ua,inv_a))./3.6acctime =19.64950.4737。
汽车理论第五版课后习题答案(正确)

第一章 汽车的动力性试说明轮胎滚动阻力的定义,产生机理和作用形式。
答:车轮滚动时,由于车轮的弹性变形、路面变形和车辙摩擦等原因所产生的阻碍汽车行驶的力称为轮胎滚动阻力。
产生机理和作用形式:(1)弹性轮胎在硬路面上滚动时,轮胎的变形是主要的,由于轮胎有内部摩擦,产生弹性迟滞损失,使轮胎变形时对它做的功不能全部回收。
由于弹性迟滞,地面对车轮的法向作用力并不是前后对称的,这样形成的合力z F 并不沿车轮中心(向车轮前进方向偏移a )。
如果将法向反作用力平移至与通过车轮中心的垂线重合,则有一附加的滚动阻力偶矩f z T F a =⋅。
为克服该滚动阻力偶矩,需要在车轮中心加一推力P F 与地面切向反作用力构成一力偶矩。
(2)轮胎在松软路面上滚动时,由于车轮使地面变形下陷,在车轮前方实际形成了具有一定坡度的斜面,对车轮前进产生阻力。
(3)轮胎在松软地面滚动时,轮辙摩擦会引起附加阻力。
(4)车轮行驶在不平路面上时,引起车身振荡、减振器压缩和伸长时做功,也是滚动阻力的作用形式。
滚动阻力系数与哪些因素有关答:滚动阻力系数与路面的种类、行驶车速以及轮胎的构造、材料和气压有关。
这些因素对滚动阻力系数的具体影响参考课本P9。
确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h 的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h 的加速时间。
轻型货车的有关数据:汽油发动机使用外特性的Tq-n 曲线的拟合公式为23419.313295.27()165.44()40.874() 3.8445()1000100010001000q n n n n T =-+-+-式中,Tq 为发动机转矩(Nm );n 为发动机转速(r/min )。
汽车理论1.3和2.7matlab编程答案
孙野 200812681.3(1)绘制汽车驱动力与行驶阻力平衡图 选用5挡变速器进行整车性能计算发动机转速与汽车行驶速度之间的关系:0377.0i i rn u g a = 发动机使用外特性的T q -n 曲线拟合公式:432)1000(8445.3)1000(874.40)1000(44.165)1000(27.295313.19n n n n T q -+-+-=汽车驱动力:ri i T F Tg q t η0=行驶阻力:2215.2115.21a D a D j w i f u A C mgf dt du m u A C Gi Gf F F F F +=+++=+++δ用matlab 编写程序如下: m1=2000; m2=1800; mz=3880; g=9.81; r=0.367; CdA=2.77; f=0.013; nT=0.85; ig=[5.56 2.769 1.644 1.00 0.793];i0=5.83; If=0.218; Iw1=1.798; Iw2=3.598; %输入已知参数 Iw=2*Iw1+4*Iw2; fori=1:69n(i)=(i+11)*50;Ttq(i)=-19.313+295.27*(n(i)/1000)-165.44*(n(i)/1000)^2+40.874*(n(i)/1000)^3-3.8445*(n(i)/1000)^4; end %从600~4000rpm 油拟合公式计算发动机转距 for j=1:5 fori=1:69Ft(i,j)=Ttq(i)*ig(j)*i0*nT/r; ua(i,j)=0.377*r*n(i)/(ig(j)*i0);Fz(i,j)=CdA*ua(i,j)^2/21.15+mz*g*f;endend%计算各档位下的驱动力和行驶阻力plot(ua,Ft,ua,Fz)title('汽车驱动力与行驶阻力平衡图'); xlabel('ua(km/h)');ylabel('Ft(N)');%作汽车驱动力与行驶阻力平衡图得到汽车驱动力与行驶阻力平衡图如下:(2)①计算汽车最高车速Matlab程序如下:for k=1:175 n1(k)=3300+k*0.1;Ttq(k)=-19.313+295.27*(n1(k)/1000)-165.44*(n1(k)/1000)^2+40.874*(n1(k)/1000)^33.8445*(n1(k)/1000)^4;Ft(k)=Ttq(k)*ig(5)*i0*nT/r;ua(k)=0.377*r*n1(k)/(ig(5)*i0);Fz(k)=CdA*ua(k)^2/21.15+mz*g*f;E(k)=abs((Ft(k)-Fz(k)));end%从3300rpm开始以0.1rpm为步长搜索直到找到for k=1:175 %驱动力与行驶阻力之差绝对值最小点(Ⅴ档处) if(E(k)==min(E))%通过其他检验程序可估计出该点大致位置(3310rpm附近) disp('汽车最高车速='); disp(ua(k));disp('km/h');end%输出结果end汽车最高车速=98.7627km/h计算得汽车最高车速为98.7627km/h。
汽车动力性计算matlab程序
%% 汽车动力性计算(自己编的动力性计算程序,供大家计算动力性时参考,具体参数大家根据所给程序对应输入,并对坐标轴数值按需要进行修改)clc; clear;close all;%%根据所给发动机数据拟合外特性曲线(发动机数据按照你所得到的数据进行输入)n_test=[500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 2100 2200];T_test=[975 1108 1298 1496 1546 1620 1670 1785 1974 1974 1970 1889 1829 1748 1669 1700 1524 1105];figure(1)plot(n_test,T_test,'g');hold ongrid on%p=polyfit(n_test,T_test,7);p=polyfit(n_test,T_test,2);n=[450:1:2200];Ttq=polyval(p,n);plot(n,Ttq,'k');xlabel('发动机转速n(r/min)');ylabel('发动机转矩Ttq(N*m)');title('发动机转矩曲线');legend('测试曲线','拟合曲线');%%所给车型动力总成相关参数ig=[3.07 2.16 1.48 1.0 0.82];i0=4.0; eta=0.78; r=0.57; M=25000; g=9.8; c=1.5; f0=0.01; f1=0.0002; f4=0.0005; CD=1; A=8;Iw=3.6;If=0.04;%% 发动机外特性曲线图figure(2)hold ongrid onfor i=length(n);Pe=Ttq.*n/9550;end[AX,H1,H2]=plotyy(n,Ttq,n,Pe);xlabel('发动机转速n(r/min)');ylabel('发动机转矩Ttq(N*m)');ylabel(AX(2),'发动机功率Pe(Kw)');title('发动机外特性曲线');%% 各挡位速度曲线%计算各挡位车速for i=1:length(ig);ua(i,:)=0.377*r*n/ig(i)/i0;end%计算各档位最高车速uamax=ua(:,length(ua(1,:)));figure(3)hold onfor i=1:length(ig);plot(n,ua(i,:),'k');endhold ongrid onxlabel('转速n(r/min)');ylabel('各挡位车速(km/h)');title('各挡位车速-转速表');legend('1挡车速','2挡车速','3挡车速','4挡车速','5挡车速'); %% 驱动力和行驶阻力平衡图%计算滚动阻力系数for i=1:length(ig);f(i,:)=f0+f1*(ua(i,:)/100)+f4*(ua(i,:)/100).^4;end%计算滚动阻力for i=1:length(ig);Ff(i,:)=c*M*g*f(i,:);end%计算空气阻力for i=1:length(ig);Fw(i,:)=CD*A*(ua(i,:).^2)/21.15; end%计算行驶阻力for i=1:length(ig);F(i,:)=Ff(i,:)+Fw(i,:);end%计算汽车驱动力for i=1:length(ig);Ft(i,:)=Ttq*ig(i)*i0*eta/r;endfigure(4)hold onfor i=1:length(ig);plot(ua(i,:), Ft(i,:),'k');plot(ua(i,:), F(i,:),'r');plot(ua(i,:), Ff(i,:),'b');endhold ongrid onxlabel('车速(km/h)');ylabel('驱动力、行驶阻力(N)');legend('驱动力Ft','行驶阻力Ff+Fw','滚动阻力Ff'); title('驱动力-行驶阻力平衡图');%% 汽车功率平衡图%计算各档位功率for i=1:length(ig);P(i,:)=Ft(i,:).*ua(i,:)/(3600*eta);end%计算风阻阻力功率for i=1:length(ig);Pw(i,:)=CD*A*ua(i,:).^3/(76140*eta);end%计算滚动阻力功率for i=1:length(ig);Pf(i,:)=M*g*f(i,:).*ua(i,:)/(3600*eta);end%计算总阻力功率for i=1:length(ig);Pz(i,:)=Pw(i,:)+Pf(i,:);endfigure(5)hold onfor i=1:length(ig);plot(ua(i,:), P(i,:),'k');plot(ua(i,:), Pz(i,:),'r');endhold ongrid onxlabel('车速(km/h)');ylabel('发动机功率、阻力功率(kW)');legend('发动机功率P','阻力功率Pz','Location','NorthWest'); title('功率平衡图');%% 动力特性图(动力因数图)for i=1:length(ig);D(i,:)= (Ft(i,:)- Fw(i,:))/M/g;endfigure(6)hold onfor i=1:length(ig);plot(ua(i,:), D(i,:),'k');plot(ua(i,:), f(i,:),'r');endhold ongrid onxlabel('车速(km/h)');ylabel('动力因数D');legend('动力因数D','滚动阻力系数f');title('动力特性图');%% 爬坡度曲线图for i=1:length(ig);I(i,:)= (tan(asin((Ft(i,:)-(Ff(i,:)+Fw(i,:)))/(M*g))))*100; endfigure(7)hold onfor i=1:length(ig);if i==1plot(ua(i,:),I(i,:),'r');elseplot(ua(i,:),I(i,:),'k');endendhold ongrid onxlabel('车速(km/h)');ylabel('最大爬坡度(%)');legend('Ⅰ挡','高速档');title('爬坡度曲线图');%% 加速度曲线图deta=1+1/M*4*Iw/r^2+1/M*If*ig.^2*i0^2*eta/r^2; for i=1:length(ig);a(i,:)=(Ft(i,:)-Ff(i,:)-Fw(i,:))./deta(i)/M;if i==5for j=1:length(n)if a(i,j)<0a(i,j)=0;elseendendendendfigure(8)hold onfor i=1:length(ig);if i==1plot(ua(i,:),a(i,:),'r'); elseplot(ua(i,:),a(i,:),'k');endendhold ongrid onxlabel('车速(km/h)');ylabel('加速度a(m/s^2)');legend('Ⅰ档','高速档');title('加速度曲线图');axis([0 120 0 1.5])%% 加速度倒数曲线for i=1:length(ig);for j=1:length(n)b(i,j)=1./a(i,j);endendfigure(9)hold onfor i=1:length(ig)plot(ua(i,:),b(i,:),'k');endhold ongrid onxlabel('车速(km/h)');ylabel('各档加速度倒数1/a');legend('各档加速度倒数1/a曲线','Location','NorthWest'); title('各档加速度倒数曲线图');axis([0 120 0 10])ad1=b(1,:);ad2=ua(1,:);for i=1:(length(ig)-1);for j=1:length(n)if ua(i+1,j)>=ua(i,length(n)) flag(i)=j;break;endendad1=[ad1 b(i+1,j:length(n))]; ad2=[ad2 ua(i+1,j:length(n))];endfigure(10)hold onplot(ad2,ad1,'k');hold ongrid onxlabel('车速(km/h)');ylabel('加速度倒数1/a');legend('加速度倒数1/a曲线','Location','NorthWest');title('加速度倒数曲线图');axis([0 120 0 10])%% 加速时间曲线k=length(n);for i=1:length(ig);t(i,1)=0;for j=2:kt(i,j)=abs(ua(i,j)-ua(i,j-1))*(b(i,j)+b(i,j-1))/2;endendfor i=1:length(ig);for j=1:kat(i,j)=sum(t(i,1:j))/3.6;endendtotalat=at(1,:);for i=1:(length(ig)-1);for j=flag(i):ktotalat=[totalat totalat(length(totalat))+t(i+1,j)/3.6];endendfigure(11)hold onplot(totalat,ad2,'k');hold ongrid onxlabel('时间(s)');ylabel('车速(km/h)');legend('加速时间','Location','NorthWest'); title('加速时间曲线图');axis([0 100 0 120])Welcome To Download !!!欢迎您的下载,资料仅供参考!。
MATLAB画驱动力-行驶阻力图,两个程序

>> r=0.367;
>> f=0.013;
>> CDA=2.77;
>> i0=5.83;
>> L=3.2;
>> a=1.947;
>> hg=0.9;
>> If=0.218;
Iw1=1.798;
Iw2=3.598;
nmin=600;nmax=4000;
>> n=600:10:4000;
for i=1:3401;
n(i)=i+599;
Ttq(i)=-19.313+295.27*(n(i)/1000)-165.44*(n(i)/1000).^2+40.874*(n(i)/1000).^3-3.8445*(n(i)/1000).^4;
end
for i=1:3401;
for j=1:5;
>> Ft4=Tq*ig(4)*i0*nT/r;
>> Ft5=Tq*ig(5)*i0*nT/r;
>> ua1=0.377*r*n/ig(1)/i0;
>> ua2=0.377*r*n/ig(2)/i0;
>> ua3=0.377*r*n/ig(3)/i0;
>> ua4=0.377*r*n/ig(4)/i0;
Ft(i,j)=Ttq(i)*i0*Ig5(j)*gt/r0;
ua(i,j)=0.377*r0*n(i)./(Ig5(j)*i0);
F(i,j)=f*m*9.8+CDA*ua(i,j).^2/21.15;
end
MATLAB绘制电动汽车驱动电机MAP详细步骤方法
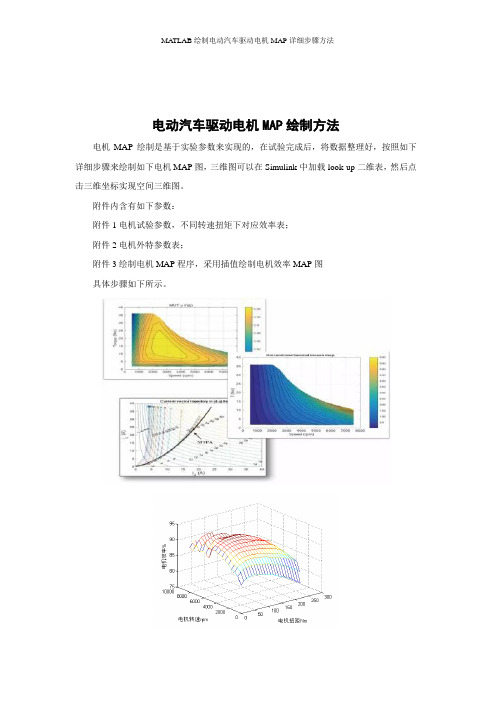
电动汽车驱动电机MAP绘制方法电机MAP绘制是基于实验参数来实现的,在试验完成后,将数据整理好,按照如下详细步骤来绘制如下电机MAP图,三维图可以在Simulink中加载look-up二维表,然后点击三维坐标实现空间三维图。
附件内含有如下参数:附件1电机试验参数,不同转速扭矩下对应效率表;附件2电机外特参数表;附件3绘制电机MAP程序,采用插值绘制电机效率MAP图具体步骤如下所示。
1.先做电机实验得到各个转速下不同扭矩对应的电机效率图,如下表附件1所示;将该表格该贴到excel中sheet2页面;2.确定电机外特性图,外特性电机转速扭矩对应关系,将外特性转速扭矩粘贴到excel中sheet1页面;见附件2;3.这个表格中含有sheet1和sheet2两个页面,将该表格存在任何一个位置(无中文路径),如存在E盘目录下(E:\motor\);4.点开MATLAB,新建一个M文件,打开后将附件3程序粘贴上,点击红色圈圈运行即可生产带外特性的电机效率图。
5.附件提供的参数不全仅供参考,具体画图还得用你自己做实验的数据来绘制,只是提供了绘制电机MAP的方法。
附件1表名:motor转速扭矩(Nm)效率(%)(r/min)500 11.3 56.6500 21.1 64.7500 30.8 69.1500 40.3 70.5500 50.6 71.1500 60.3 71.5500 70.0 71.2500 80.4 71.1500 90.2 70.3500 100.1 69.7500 110.0 68.7500 120.0 68.2500 129.7 67.8500 140.1 67.2附件2:电机外特性曲线程序附件3clear;clc;speed_load= xlsread('E:\ motor.xlsx','sheet1','A2:A22');%导入加载试验外特性转速数据,A2:A22表示数据在A列,从第2行开始到第22行torque_load= xlsread(' E:\ motor.xlsx','sheet1','B2:B22');%导入加载试验外特性扭矩数据,B2:B22表示数据在B列,从第2行开始到第22行speed_eff= xlsread(' E:\ motor.xlsx','sheet2','A2:A261');%导入效率试验转速数据,A2:A261表示数据在A列,从第2行开始到第261行torque_eff= xlsread(' E:\ motor.xlsx','sheet2','B2:B261');%导入效率试验转矩数据,B2:B261表示数据在B列,从第2行开始到第261行efficiency_eff= xlsread(' E:\ motor.xlsx','sheet2','C2:C261');%导入效率试验效率数据,C2:C261表示数据在C列,从第2行开始到第261行value_eff= [50 54 58 60 64 68 70 74 78 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94]; %设置效率MAP曲线的标定数值[SPEED,TORQUE]=meshgrid(0:500:9500,0:10:240);%设置横纵坐标轴范围EFFICIENCY= griddata(speed_eff,torque_eff,efficiency_eff,SPEED,TORQUE);%散乱点插值[c,h]=contour(SPEED,TORQUE,EFFICIENCY,value_eff);%生成数据矩阵不带填充的二维等值图clabel(c,h,value_eff);%为二维等值图添加数据标签xlabel('电机转速(rpm)');ylabel('电机扭矩(Nm)');hold onplot(speed_load,torque_load,'r','linewidth',2.5);。
基于MATLAB编程绘制动力特性图分析汽车动力性

10.16638/ki.1671-7988.2017.13.020基于MATLAB编程绘制动力特性图分析汽车动力性尹佣博(武汉理工大学汽车工程学院,湖北武汉430070 )摘要:汽车动力性主要由最高车速、加速时间、最大爬坡度三个指标来评价。
汽车动力性试验主要包括最高车速、起步连续换挡加速与超车加速和汽车最大爬坡度三大内容。
上述试验项目需要特定的试验路段,且耗时较长。
基于MA TLAB编程可以绘出发动机外特性曲线图和动力特性图,从动力特性图的角度研究汽车的动力性,不仅可以准确获得最高车速、加速时间和最大爬坡度等指标,还可以通过图像观察相关变化趋势,为进一步研究汽车的动力性提供了参考。
关键词:汽车动力性;MATLAB编程;动力特性图中图分类号:U461.2 文献标识码:A 文章编号:1671-7988 (2017)13-65-04Drawing dynamic characteristic diagram based on MATLAB programming toanalyze automobile powerYin Yongbo( Wuhan University of Technology. School of Automotive Engineering, Hubei Wuhan 430070 )Abstract:Vehicle dynamics mainly by the highest speed, acceleration time, the maximum climbing three indicators to evaluate. Vehicle power test includes the maximum speed, starting continuous shift acceleration and overtaking acceleration and the maximum car climbing three content. The pilot project requires a specific test section, and take a long time. Based on the MA TLAB programming, we can plot the engine characteristic curve and the dynamic characteristic diagram. From the view of the dynamic characteristic diagram, we can study the dynamic performance of the vehicle, not only can get the maximum vehicle speed, acceleration time and maximum climbing index, but also observe the correlation And provides a reference for further research on the dynamics of the vehicle.Keywords: Vehicle dynamics; MATLAB programming; Dynamic characteristics mapCLC NO.: U461.2 Document Code: A Article ID: 1671-7988 (2017)13-65-04前言汽车是高效率的交通工具,在汽车的众多性能中,动力性是汽车最重要的性能。
毕业设计(论文)-基于Matlab的汽车动力性与经济性分析计算
提供全套毕业论文图纸,欢迎咨询编号毕业设计(论文)题目基于Matlab的汽车动力性与经济性分析计算二级学院专业车辆工程班级学生姓名学号指导教师职称时间目录摘要 (I)Abstract (II)1绪论 (1)1.1选题背景 (1)1.2国内外汽车动力性经济性仿真研究发展过程与现状 (2)1.3课题研究主要内容与意义 (3)2汽车动力性经济性计算中发动机模拟的理论基础 (5)2.1发动机数学模型的建立 (5)2.1.1发动机外特性 (5)2.1.2发动机万有特性 (8)2.2本章小结 (10)3汽车动力性模拟计算 (12)3.1汽车最高车速的计算 (13)3.2加速时间的计算 (16)3.2.1原地起步加速时间 (17)3.2.2超车加速时间 (19)3.3最大爬坡度的计算 (19)3.4各档动力因数的计算 (21)3.5小结 (23)4汽车燃油经济性模拟计算 (24)4.1汽车燃油经济性的评价指标 (24)4.2不同行驶工况的汽车燃油经济性计算 (25)4.2.1等速工况 (25)4.2.2加速工况 (25)4.2.3减速工况 (27)4.2.4怠速工况 (27)4.2.5多工况循环百公里油耗 (27)4.3等速行驶工况的汽车燃油经济性计算 (27)4.4影响汽车燃油经济性的因素 (31)4.5小结 (38)5动力性和燃油经济性的参数敏感性分析 (39)5.1汽车动力性的参数敏感度分析 (39)5.2汽车燃油经济性的灵敏度分析 (40)5.3本章小结 (42)6结论 (44)致谢 (46)参考文献 (47)附录 (49)附录一 (49)附录二 (51)附录三 (62)附录四 (68)文献综述 (85)摘要本文首先利用了最小二乘法和回归分析法对所给试验数据拟合,得到了一个函数化的发动机外特性模型和万有特性模型,为后文汽车动力与燃油经济性的仿真奠定了基础。
然后,我们建立了汽车的动力性数学模型,详细分析了汽车动力性的几个评价指标,给出各个指标的计算方法及计算公式,并绘制出汽车的动力特性图,在完成动力性仿真分析之后,我们建立了汽车燃油经济性的数学模型,分析不同工况下汽车的燃油经济性并重点分析等速百公里的燃油消耗量,得到不同档位下不同车速的等速百公里燃油消耗量,并从汽车的使用方面和汽车结构方面详细的分析了影响汽车燃油经济性的因素。
汽车理论第5版课后题答案
分析1)比较附着力利用情况,即比较汽车前(F.F)、后轮(F.R.)地面切向反作用力与地面作用于前(F.F)、后轮(F.R.)的法向反作用力的比值。解题时应注意,地面法向发作用力包括静态轴荷、动态分量、空气升力和滚动阻力偶矩产生的部分,如若进行简化要对简化的合理性给予说明。地面作用于车轮的地面切向反作用力则包括滚动阻力和空气阻力的反作用力。
以上三式联立得: =0.095。
iii>求极限最大加速度:
令坡度阻力和空气阻力均为0,Fz1=9643.2 N
=1928.6N
由书中式(1-15)
解得 1.13。
2)当附着系数Φ=0.7时,同理可得:
最高车速: =394.7 km/h。
最大爬坡度: 。
最大加速度: 4.14
方法二:
忽略空气阻力与滚动阻力,有:
轻型货车的有关数据:
汽油发动机使用外特性的Tq-n曲线的拟合公式为
式中,Tq为发动机转矩(N•m);n为发动机转速(r/min)。
发动机的最低转速nmin=600r/min,最高转速nmax=4000r/min。
装载质量2000kg
整车整备质量1800kg
总质量3880kg
车轮半径0.367m
传动系机械效率ηt=0.85
解:1)绘制汽车驱动力与行驶阻力平衡图
பைடு நூலகம்汽车驱动力Ft=
行驶阻力Ff+Fw+Fi+Fj=G•f + +G•i+
发动机转速与汽车行驶速度之间的关系式为:
由本题的已知条件,即可求得汽车驱动力和行驶阻力与车速的关系,编程即可得到汽车驱动力与行驶阻力平衡图。