基于LabVIEW的汽车防撞报警系统的设计
汽车碰撞预警报警系统的设计
平,高电平持续的时间就是超声波从发射到返回
的时间。测试距离=(高电平时间*声速 (340M/S))/2
三轴加速度传感器
• 三轴加速度传感器也是基于重力原理的,因此用三轴加速 度传感器可以实现双轴正负90度或双轴0-360度的倾角
• 要准确了解物体的运动状态,必须测得其三个合下,只有应用三轴加速 度传感器来检测加速度信号
工作模块系统图
超声波 超声波测距 测距
GPS定 位模块
语音提 示模块
MCU
用户模 块
碰撞检 测模块
GPRS通 信模块
超声波测距
• 基本工作原理:
• (1)采用 IO 口 TRIG 触发测距,给最少 10us 的高 电平信呈。 • (2)模块自动发送 8 个 40khz 的方波,自动检测 是否有信号返回。 • (3)有信号返回,通过 IO 口 ECHO 输出一个高电
汽车碰撞预警报警系统设计
该系统所实现的功能:
当该系统启动时,系统能实时检测该车与前车车距,
当车距小于安全距离时,通过语音模块对驾驶员作出减速 提示;当检测到车祸发生后,能通过GPS模块准确获取当
前车辆位置信息,并通过GPRS模块向公安和医疗部门报
警;能在自动报警前向驾驶员作出语音提示,并可实现驾 驶员手动终止报警,避免误报警。
② 若车主遇到车祸,不能动,
更甚至失去知觉,该系统就 会自动发送报警。
本设计的优点
本设计基于单片机 设计,车主操作简 单,可以自动报警 ,经过测试试验,报 警速度快,灵敏度 高!
GPS和GPRS的功能介绍
如果车辆发生车祸的时候,报警系统 自动报警,GPRS发送报警信号 ,结合 GPS将车祸位置直接发送出去,不仅提高 了报警速度,为受害者减轻伤害。而且, 还能缓解道路拥挤的时间,为大家带来方
汽车碰撞监测与预警系统设计与实现
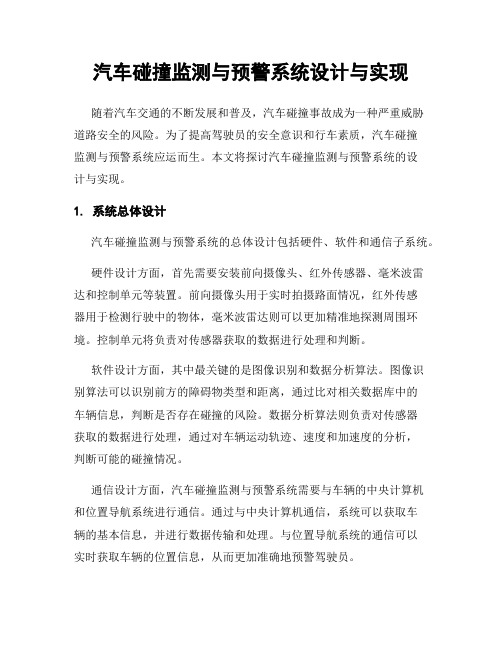
汽车碰撞监测与预警系统设计与实现随着汽车交通的不断发展和普及,汽车碰撞事故成为一种严重威胁道路安全的风险。
为了提高驾驶员的安全意识和行车素质,汽车碰撞监测与预警系统应运而生。
本文将探讨汽车碰撞监测与预警系统的设计与实现。
1. 系统总体设计汽车碰撞监测与预警系统的总体设计包括硬件、软件和通信子系统。
硬件设计方面,首先需要安装前向摄像头、红外传感器、毫米波雷达和控制单元等装置。
前向摄像头用于实时拍摄路面情况,红外传感器用于检测行驶中的物体,毫米波雷达则可以更加精准地探测周围环境。
控制单元将负责对传感器获取的数据进行处理和判断。
软件设计方面,其中最关键的是图像识别和数据分析算法。
图像识别算法可以识别前方的障碍物类型和距离,通过比对相关数据库中的车辆信息,判断是否存在碰撞的风险。
数据分析算法则负责对传感器获取的数据进行处理,通过对车辆运动轨迹、速度和加速度的分析,判断可能的碰撞情况。
通信设计方面,汽车碰撞监测与预警系统需要与车辆的中央计算机和位置导航系统进行通信。
通过与中央计算机通信,系统可以获取车辆的基本信息,并进行数据传输和处理。
与位置导航系统的通信可以实时获取车辆的位置信息,从而更加准确地预警驾驶员。
2. 功能实现汽车碰撞监测与预警系统主要包括前方碰撞预警、车道偏离预警和盲点检测等功能。
前方碰撞预警是系统的核心功能之一。
当系统检测到前方障碍物,并判断存在碰撞风险时,会通过视觉提示、声音警示或震动座椅等方式提醒驾驶员采取紧急刹车或躲避行动。
预警信息可以通过中央显示屏显示,同时也会通过语音指令告知驾驶员。
车道偏离预警可以有效防止驾驶员因为驾驶疲劳或分神导致车辆偏离车道。
当系统检测到车辆偏离车道时,会及时通过声音或震动进行提醒。
此外,还可以通过驾驶员座椅调整或方向盘振动来改变驾驶员的注意力。
盲点检测可以消除驾驶员在车辆转弯或换道时盲点带来的安全隐患。
系统会通过物体检测和距离计算算法检测侧后方的车辆,在有车辆进入盲区时,及时通过声音或显示指示驾驶员注意,并避免发生碰撞。
LabVIEW在汽车工程中的应用案例
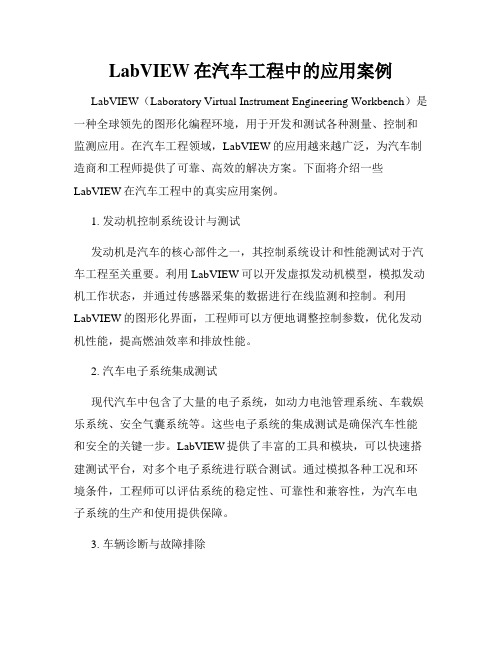
LabVIEW在汽车工程中的应用案例LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种全球领先的图形化编程环境,用于开发和测试各种测量、控制和监测应用。
在汽车工程领域,LabVIEW的应用越来越广泛,为汽车制造商和工程师提供了可靠、高效的解决方案。
下面将介绍一些LabVIEW在汽车工程中的真实应用案例。
1. 发动机控制系统设计与测试发动机是汽车的核心部件之一,其控制系统设计和性能测试对于汽车工程至关重要。
利用LabVIEW可以开发虚拟发动机模型,模拟发动机工作状态,并通过传感器采集的数据进行在线监测和控制。
利用LabVIEW的图形化界面,工程师可以方便地调整控制参数,优化发动机性能,提高燃油效率和排放性能。
2. 汽车电子系统集成测试现代汽车中包含了大量的电子系统,如动力电池管理系统、车载娱乐系统、安全气囊系统等。
这些电子系统的集成测试是确保汽车性能和安全的关键一步。
LabVIEW提供了丰富的工具和模块,可以快速搭建测试平台,对多个电子系统进行联合测试。
通过模拟各种工况和环境条件,工程师可以评估系统的稳定性、可靠性和兼容性,为汽车电子系统的生产和使用提供保障。
3. 车辆诊断与故障排除车辆诊断和故障排除是汽车维修和保养的重要任务。
传统的人工排除方法通常耗时且容易出错。
LabVIEW可以基于车辆的故障代码和传感器数据,开发智能诊断系统,准确判断问题所在并提供解决方案。
通过与汽车主要系统的通信,如发动机控制单元(ECU)、车身控制模块(BCM)等,LabVIEW可以实时获取和分析数据,提高故障检测的准确性和效率。
4. 车辆动态性能测试对汽车的动态性能进行测试是评估和改进汽车性能的重要手段。
利用LabVIEW可以设计和控制车辆的动力学测试台,模拟各种路况和工况,如制动、加速、悬挂等。
通过高精度的传感器和数据采集设备,LabVIEW可以准确记录和分析车辆在不同测试条件下的动态性能参数,为汽车改进和优化提供参考依据。
基于LabVIEW的汽车倒车显示与报警设计
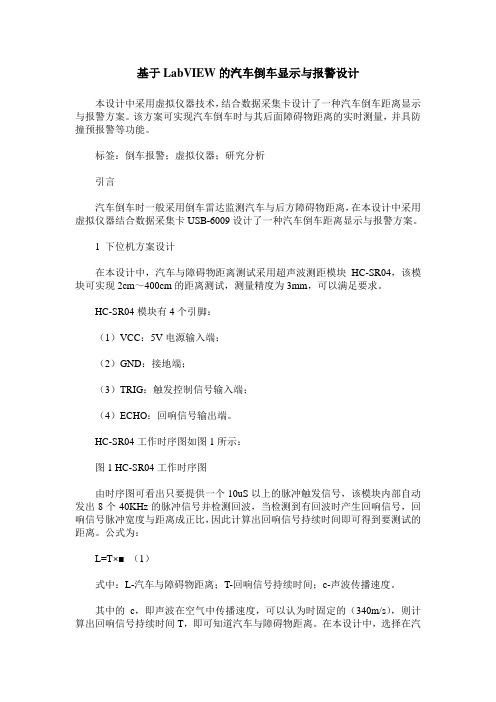
基于LabVIEW的汽车倒车显示与报警设计本设计中采用虚拟仪器技术,结合数据采集卡设计了一种汽车倒车距离显示与报警方案。
该方案可实现汽车倒车时与其后面障碍物距离的实时测量,并具防撞预报警等功能。
标签:倒车报警;虚拟仪器;研究分析引言汽车倒车时一般采用倒车雷达监测汽车与后方障碍物距离,在本设计中采用虚拟仪器结合数据采集卡USB-6009设计了一种汽车倒车距离显示与报警方案。
1 下位机方案设计在本设计中,汽车与障碍物距离测试采用超声波测距模块HC-SR04,该模块可实现2cm~400cm的距离测试,测量精度为3mm,可以满足要求。
HC-SR04模块有4个引脚:(1)VCC:5V电源输入端;(2)GND:接地端;(3)TRIG:触发控制信号输入端;(4)ECHO:回响信号输出端。
HC-SR04工作时序图如图1所示:图1 HC-SR04工作时序图由时序图可看出只要提供一个10uS以上的脉冲触发信号,该模块内部自动发出8个40KHz的脉冲信号并检测回波,当检测到有回波时产生回响信号,回响信号脉冲宽度与距离成正比,因此计算出回响信号持续时间即可得到要测试的距离。
公式为:L=T×■ (1)式中:L-汽车与障碍物距离;T-回响信号持续时间;c-声波传播速度。
其中的c,即声波在空气中传播速度,可以认为时固定的(340m/s),则计算出回响信号持续时间T,即可知道汽车与障碍物距离。
在本设计中,选择在汽车尾部放置3个HC-SR04,3路测距模块距离的计算全部采用软件完成。
3个HC-SR04和USB-6009连接示意图如图2所示。
图2 HC-SR04和USB-6009连接示意图汽车倒车时,需要首先得到倒车信号,根据倒车信号启动上位机软件实现倒车数据的采集与报警。
倒车信号可由采集档位信号获取,档位数据采集电路如图3所示。
2 上位机软件方案设计倒车信息运算模块首先利用USB6009的模拟输入通道AI3采集档位数据,利用其P0.2口发出HC-SR04控制信号,通过对P0.5、P0.6、P0.7三路电平信号进行运算,得到其所代表的汽车与障碍物距离信息。
汽车碰撞预警系统的设计与仿真
汽车碰撞预警系统的设计与仿真随着汽车数量的增加,道路交通事故也屡见不鲜。
为了减少交通事故带来的伤亡和财产损失,汽车技术领域不断努力创新,其中之一就是汽车碰撞预警系统。
本文将讨论汽车碰撞预警系统的设计与仿真。
一、引言汽车碰撞预警系统是一种利用传感器和智能算法的系统,可以检测到汽车前方障碍物,并向驾驶员提供实时警告,以避免碰撞事故的发生。
这种系统的设计和仿真是确保其可靠性和有效性的重要步骤。
二、碰撞预警系统的组成碰撞预警系统由传感器、控制单元和警报装置组成。
传感器通过不同的技术来感知汽车前方的障碍物,例如雷达、摄像头和超声波传感器等。
控制单元负责从传感器接收数据并分析处理,以便判断是否有碰撞的风险。
一旦警示系统判断存在碰撞风险,它会通过警报装置向驾驶员发出警告。
三、设计原则和考虑因素在设计汽车碰撞预警系统时,以下几个原则和考虑因素是必不可少的:1. 安全性:碰撞预警系统的主要目标是提高汽车的安全性。
因此,系统的准确性和及时性都至关重要,以确保驾驶员在可能发生碰撞之前得到及时警告。
2. 可靠性:碰撞预警系统在各种道路和天气条件下都应可靠运行。
设计和仿真需要考虑各种场景和情况,以确保系统的鲁棒性和可靠性。
3. 灵敏度:碰撞预警系统需要能够准确地探测到不同类型的障碍物,包括车辆、行人和自行车等。
设计时需要考虑传感器的灵敏度和响应速度,以确保系统可以及时发出警告。
4. 使用友好性:碰撞预警系统的用户是驾驶员,因此系统应设计简单且易于使用。
警告信号应清晰明了,避免干扰驾驶员正常的驾驶操作。
四、碰撞预警系统的仿真为了确保汽车碰撞预警系统的功能和性能,进行仿真是必要的。
仿真可以模拟各种道路条件和交通环境,以测试和验证系统对不同情况的响应。
在碰撞预警系统的仿真中,需要考虑以下几个方面:1. 障碍物模拟:通过在仿真环境中生成虚拟的障碍物,如车辆、行人和自行车,以模拟真实道路上的各种情况。
这些障碍物应在尺寸、形状和运动特征等方面与实际情况相匹配。
汽车防撞预警系统设计
汽车防撞预警系统设计一、系统概述汽车防撞预警系统主要由传感器、控制器、报警装置和执行机构四部分组成。
传感器负责实时监测车辆周围的环境信息,控制器对收集到的信息进行处理和分析,判断是否存在碰撞风险,如有风险,立即启动报警装置并控制执行机构进行干预。
二、传感器选型与布局1. 传感器选型为实现全天候、全方位的监测,本系统选用毫米波雷达、摄像头和超声波传感器三种传感器。
毫米波雷达具有穿透力强、抗干扰能力强等优点,适用于雨雾等恶劣天气;摄像头可识别道路标志、行人和车辆等目标;超声波传感器则用于检测车辆周围的近距离障碍物。
2. 传感器布局根据车辆结构和行驶需求,本系统将传感器均匀分布在车辆的前后左右四个方向,确保无死角监测。
具体布局如下:(1)前方:安装两个毫米波雷达,分别位于车辆前保险杠两侧,覆盖前方120°的监测范围。
(2)后方:安装一个毫米波雷达,位于车辆后保险杠中央,覆盖后方60°的监测范围。
(3)左右两侧:各安装一个摄像头,分别位于车辆左右两侧,覆盖左右两侧60°的监测范围。
(4)四周:安装四个超声波传感器,分别位于车辆前后保险杠和左右两侧,用于检测近距离障碍物。
三、控制器设计1. 算法设计(1)数据预处理:对传感器采集到的数据进行去噪、滤波等处理,提高数据质量。
(2)目标检测与识别:通过摄像头识别道路标志、行人和车辆等目标,结合毫米波雷达和超声波传感器数据,确定目标的位置、速度等信息。
(3)碰撞风险评估:根据目标的位置、速度等信息,计算与本车的相对距离和相对速度,预测未来一段时间内可能发生的碰撞情况。
(4)预警决策:根据碰撞风险评估结果,判断是否触发预警。
2. 硬件设计控制器硬件部分主要包括处理器、存储器、通信接口等。
处理器选用高性能、低功耗的嵌入式芯片,满足系统实时性和稳定性的需求;存储器用于存储算法模型和运行数据;通信接口负责与传感器、报警装置和执行机构进行数据交互。
汽车防撞预警系统毕业设计论文

汽车防撞预警系统毕业设计论文汽车防撞预警系统是一种基于先进传感技术和智能算法的车辆安全辅助系统,可以在汽车行驶过程中检测潜在的碰撞风险,并在情况危急时向驾驶员发出警示,起到保障行车安全的作用。
本论文旨在介绍汽车防撞预警系统的设计原理和实现方法,并通过仿真实验验证其效果。
首先,本论文将阐述汽车防撞预警系统的需求分析。
通过调研市场上已有的类似产品以及分析汽车事故的原因和危害,确定汽车防撞预警系统需要具备的功能和性能指标。
本文将重点讨论系统对前方障碍物的识别和跟踪能力、碰撞风险评估算法的准确性和实时性,以及警示手段的有效性等方面。
其次,本论文将详细介绍汽车防撞预警系统的设计原理。
系统主要由传感器模块、信号处理模块和警示模块组成。
传感器模块负责采集车辆周围环境的信息,包括摄像头、雷达和超声波传感器等。
信号处理模块负责对传感器采集的数据进行处理和分析,提取出障碍物的特征并进行跟踪,同时计算出碰撞风险评估值。
警示模块负责向驾驶员发出警示信号,可以通过声音、光线和振动等方式进行。
然后,本论文将探讨汽车防撞预警系统的实现方法。
针对传感器模块,本文将介绍摄像头、雷达和超声波传感器的工作原理和选型方法,并给出传感器的布置方案。
对于信号处理模块,本文将详细介绍特征提取和跟踪算法的设计原理和实现方法,以及碰撞风险评估算法的建立。
对于警示模块,本文将介绍警示信号的设计原则和警示手段的选择。
最后,本论文将通过仿真实验验证汽车防撞预警系统的效果。
通过搭建仿真平台,模拟不同场景下的碰撞风险,评估系统对障碍物的识别和跟踪准确性,以及碰撞风险评估算法的实时性和准确性。
同时,还将评估警示手段对驾驶员行为的影响,以及系统的用户友好性。
综上所述,本论文旨在通过设计和实现一种基于先进传感技术和智能算法的汽车防撞预警系统,为驾驶员提供更加安全和便捷的驾驶体验。
本论文将通过理论分析和仿真实验,验证系统的可行性和有效性。
labview报警器课程设计
labview报警器课程设计一、课程目标知识目标:1. 理解LabVIEW编程基础,掌握虚拟仪器的设计原理;2. 学会使用LabVIEW软件设计报警器程序,理解报警器工作原理;3. 掌握传感器数据采集、处理和显示的基本方法。
技能目标:1. 能够独立完成LabVIEW报警器程序的设计与搭建;2. 能够运用所学知识解决实际报警器使用过程中遇到的问题;3. 能够通过团队协作,完成报警器项目的调试与优化。
情感态度价值观目标:1. 培养学生动手实践能力,激发学生对电子设计的兴趣;2. 培养学生严谨的科学态度,提高分析问题和解决问题的能力;3. 培养学生团队协作精神,提高沟通与交流能力。
本课程针对高年级学生,结合LabVIEW课程内容和学生的认知特点,注重理论与实践相结合,旨在提高学生的编程能力、实践操作能力和团队协作能力。
通过本课程的学习,使学生能够将所学知识应用于实际项目中,为培养具备创新精神和实践能力的电子信息类专业人才奠定基础。
二、教学内容本章节教学内容主要包括以下几部分:1. LabVIEW编程基础:介绍LabVIEW软件的界面及基本操作,重点讲解VI的创建与编辑,使学生掌握虚拟仪器的设计原理。
2. 报警器原理:讲解报警器的工作原理,包括传感器数据采集、信号处理、报警逻辑判断等。
3. LabVIEW报警器程序设计:结合教材内容,详细讲解以下模块:- 传感器数据采集模块:介绍传感器与数据采集卡的使用,实现数据采集;- 数据处理与显示模块:讲解数据滤波、放大、计算等处理方法,并实现数据显示;- 报警逻辑判断模块:设计报警逻辑,实现报警功能;- 用户界面设计模块:设计友好的用户界面,实现人机交互。
4. 报警器项目实践:将学生分组进行项目实践,要求每组完成一个具有实际应用的报警器设计。
内容包括:- 确定项目需求,制定项目计划;- 分工合作,完成报警器程序设计与搭建;- 项目调试与优化,确保报警器稳定可靠。
基于LabVIEW的汽车制动防抱死远程实验系统设计

i n g , D a l i a n U n i v e r s i t y o f T e c h n o l o g y ,D a l i a n 1 1 6 0 2 4, C h i n a ) Ab s t r a c t :A n t i — l o c k B r a k e S y s t e m( A B S )i s o n e o f t h e i m p o r t a n t a n d c o m p l e x t e a c h i n g c o n t e n t s o f
重要和复杂 的教学 内容 。利用 虚拟 仪器技术 、网络技术 以及 L a b V I E W 设 计软 件 ,A B S实 验台 ,基 于 N I C o m- p a c t R I O数据采 集模块设计并实现 了汽 车制 动防抱死远程实验系统 。系统 由硬件实 验平 台和远程实验 网络管理 系统两部分组成 。基于该远程实验 系统完成 了 A B S系统 的远程 实验教 学 ,实现 了国内外高 校之 间实 验资源 的 共享 ,使先进教学方法 和优越 的实验室条件得到广泛利用 。
!
! = Q
实
验
5期
2 0 1 4年 l 0月
Oc t . 2 01 4
CN 1 2—1 3 5 2 / N
L AB0RAT 0RY
S CI E NCE
V0 1 . 1 7 No . 5
基于 L a b V I E W 的汽 车制 动防抱死远程 实验 系统设计
mo d e m a u t o mo t i v e e l e c t r o n i c s y s t e ms ,w h i c h c a n e f f e c t i v e l y p r e v e n t t h e w h e e l s f r o m l o c k i n g .A r e mo t e e x p e i r me n t a l s y s t e m f o r r e mo t e mo n i t o r i n g a n d c o n t r o l o f AB S i s d e s i g n e d a n d i mp l e me n t e d u s i n g v i tu r -
LabVIEW中的智能监控与报警系统

LabVIEW中的智能监控与报警系统LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是美国国家仪器公司(National Instruments)开发的一种工程软件,广泛应用于科学实验室和工业自动化领域。
在LabVIEW中,通过使用虚拟仪器和图形化编程语言,用户可以构建各种各样的应用程序。
其中,智能监控与报警系统是LabVIEW的一个重要应用领域。
智能监控与报警系统是一种通过传感器实时监测设备或系统状态,当监测值达到设定的阈值或条件时,自动产生报警信号并采取相应的措施。
LabVIEW提供了丰富的工具和函数库,能够方便地实现智能监控与报警系统的开发与部署。
一、LabVIEW中的数据采集与处理在智能监控与报警系统中,数据的采集和处理是非常重要的步骤。
LabVIEW提供了丰富的虚拟仪器,可以实时获取各种类型的传感器数据,如温度、压力、湿度等。
用户可以通过LabVIEW的图形化编程环境,快速地配置传感器和采集设备,并进行数据的实时采集和处理。
LabVIEW提供了丰富的数据处理函数和算法,如滤波、傅里叶变换、时域分析等,可以对采集到的数据进行实时处理和分析。
用户可以自定义算法,根据实际需要对数据进行滤波、求导、积分等处理,以提取关键信息并进行监控和报警。
二、LabVIEW中的智能监控算法智能监控与报警系统需要结合适当的算法进行监控和判断,LabVIEW提供了多种智能监控算法的工具和函数库。
例如,LabVIEW中的模糊控制器、神经网络、遗传算法等,能够快速有效地进行数据建模和监控。
用户可以根据实际情况选择合适的算法,并通过LabVIEW进行配置和调试。
LabVIEW提供了直观的图形化界面,用户可以通过拖拽、连接和配置来快速构建算法模型,并实时监控算法的运行状态和结果。
三、LabVIEW中的报警与控制当监测到异常情况或某个预设的条件达到时,智能监控与报警系统需要发出报警信号并采取相应的措施。
基于LabVIEW的汽车倒车显示与报警设计

科 技 创 新
基于 L a b V I E W 的汽车倒车显示与报警设计
周 全
( 安徽 国防科技职业 学院 , 安徽 六安 2 3 7 0 1 1 )
摘 要: 本设 计 中采 用虚拟 仪 器技 术 , 结 合数 据 采 集卡 设 计 了一 种汽 车倒 车距 离显 示 与报 警 方案 。 该 方 案 可 实现 汽车倒 车 时与其 后 面 障碍 物距 离的 实时 测量 , 并 具 防撞 预报 警 等 功能 。 关键词: 倒 车报 警 ; 虚 拟仪 器 ; 研 究 分析 汽 车倒 车 时 , 需 要 首 先得 到倒 车信 汽车倒车时一般采用倒车雷达监测汽车与后方障碍物距离 , 在 号 , 根据倒车信号启动上位机软件实现 本设计 中采用虚拟仪器结合数据采集卡 U S B 一 6 0 0 9 设计 了一 种汽 倒车数据的采集 与报警。倒车信号可由 车倒车距离显示与报警方案。 采集档位信号获取 , 档位数据采集 电路 1下 位 机方 案 设计 如 图 3所示 。 在本设计 中, 汽车与障碍物距离测试采用超声波测距模块 H C — 2上位机软件方案设计 S R 0 4 , 该模块可实现 2 c m~ 4 0 0 e m的距 离测试 , 测量精度为 3 m m, 可 倒 车 信 息 运 算 模 块 首 先 利 用 以满 足要 求 。 U S B 6 0 0 9的 模 拟 输 入 通 道 A I 3采 集 档 H C — S R 0 4模块 有 4 个引脚 : 位数据 ,利 用其 P 0 . 2口发 出 H C — S R 0 4 前进档 ( 1 ) V C C : 5 V 电源 输入 端 ; 控制信号 ,通过对 P 0 . 5 、 P 0 . 6 、 P 0 . 7三路 ( 2 ) G N D: 接 地端 ; 电平信号进行运算 , 得到其所代表的汽 ( 3 ) T R I G: 触发控制信号输入端 ; 车与障碍物距离信息 。 ( 4 ) E C H 0 : 回响信号输出端 。 档位信号的采集程序如图 4所示 : H C — S R 0 4工作 时 序 图如 图 1 所示 : H C — S R 0 4工作时 T R I G为触发控制 信号输入端 ,需要施加触发控制信号 , 利用程序 控制 U S B 6 0 0 9发送信号 传送 给H C — S R 0 4 , 使其产生触发信 号 , 再 利 饿 发髂号 用 L a b V I E W 程 序 采 集 T R I G 经 U S B 6 0 0 9 送 来的超声波传输时 间信号 。 回响 输 出 信 号 输 出 电平 信 号 采 集 程 序 i 横 块冉 鄄 分 别如 图 5 所示 。 图 3 档位 数 据采 集 电路
汽车无线防盗防撞报警器的设计

汽车无线防盗防撞报警器的设计随着汽车数量的增多和社会治安情况的不断恶化,汽车被盗、被撞等问题日益严重,汽车无线防盗防撞报警器的需求也逐渐增加。
汽车无线防盗防撞报警器是一种能够在汽车被盗或发生碰撞时发出警报的装置,能够有效地保护车辆的安全,预防车辆被盗和发生交通事故。
本文将设计一款汽车无线防盗防撞报警器,并对其进行详细介绍。
一、产品特点1. 无线传输汽车无线防盗防撞报警器采用无线传输技术,可以方便快捷地实现与车辆的连接。
用户只需要将报警器安装在车辆上,通过手机或其他智能设备与报警器连接,即可实现远程监控和控制。
2. 多功能报警报警器具有多种报警功能,包括防盗报警、碰撞报警、紧急求救报警等。
当车辆被非法入侵、发生碰撞或驾驶员遇到紧急情况时,报警器将立即发出警报,并通过手机或其他智能设备向相关人员发送报警信息,以便及时采取措施。
3. 高精度定位报警器内置高精度定位模块,可以实时追踪车辆的位置,并通过地图软件显示车辆的行驶轨迹。
一旦车辆被盗,用户可以随时通过手机或其他智能设备查看车辆的位置,并及时报警求助。
4. 远程控制用户可以通过手机或其他智能设备远程控制报警器,包括启动/关闭报警器、启动/熄火车辆、开关车灯等操作,以便及时应对各种情况。
5. 多平台兼容报警器支持多种平台,包括iOS、Android等,可以与不同类型的智能设备实现兼容和连接,方便用户使用。
二、产品设计汽车无线防盗防撞报警器的设计包括硬件和软件两部分。
1. 硬件设计硬件部分主要包括报警器主体、无线模块、定位模块和电源模块等。
报警器主体采用防水防尘设计,能够在恶劣的环境下正常工作。
无线模块采用低功耗蓝牙和2G/3G/4G网络技术,实现与手机等智能设备的无线连接。
定位模块采用高精度GPS 定位技术,能够实时追踪车辆的位置。
电源模块采用高容量锂电池,能够长时间供电,保证报警器的稳定运行。
2. 软件设计软件部分主要包括手机APP和后台管理系统两部分。
基于LabVIEW的汽车防抱死系统设计与仿真
〔 涉密的学位论文在解密后遵守此规定)
作者签名
: 4A - 7- 1- , 2
导师签名
: 鱼 , 擎二
期:日 书,. 价 ad J .a
日
期:a o. a 即。 }. gq l z .
华北电力大学硕士学位论文
第一章 绪论
1 . 1本选题的目的及意义
关键词:汽车,防抱死,L b IW aV E
ABS TRACT
B sd r io l k g t , A io B k g t hs n t di a bai ss m te tl k ai Ss m a be ae o a t n r n y e h n - c r n y e n e ds n g a avne m cai ll tcl hd k ec t , i sol egi a n ac ehn ae c i - r i t s e w c hu i n s d d c -e ra y o n i y m h h d s
表31usb2015数据采集卡输入输出端口xs2功能分配表d10左前轮速传感器11d00左前常开电磁阀控制d11右前轮速传感器12d01左前常闭电磁阀控制d12左后轮速传感器13d02右前常开电磁阀控制d13右后轮速传感器14d03右前常闭电磁阀控制d14刹车灯开关15d04左后常开电磁阀控制d15驻车制动开关16d05左后常闭电磁阀控制d16电瓶电压监测17d06右后常开电磁阀控制d17主电源电压监测18007右后常闭电磁阀控制dgnd数字地19dgnd数字地10dgnd数字地20dgnd数字地华北电力大学硕士学位论文表32usb2015数据采集卡定时计数端口xs3功能分配表1lclk2时基信号输入gateo左前轮速信号输入12dgnd数字地clko时基信号输入13out3dgnd数字地14gate3右后轮速信号输入15clk3时基信号输入gatel右前轮速信号输入16dgnd数字地clkl时基信号输入17dgnd数字地dgnd数字地18clk19dgndi0gate2左后轮速信号输入20vcc5v电源输出usb2015采集卡提供四路计数器每一路均有门控信号输入端gate时基信号clk和输出端out
基于LabVIEW的应变测量与报警系统设计

在建筑和机械工程 中( 比如汽车底 盘、 大跨 桥梁 、 型 大 水坝 、 地下建筑 等) 都要求其 结构能 提供更高 的强度 , 更好 的可靠性 、 耐久性及安全 性。为 了检测构件设 计是 否合理 及物理力学性 能是否达到要求 , 需要对 构件 变形时产 生 的
性实验 , 记录其极限值 , 也需要测 量其应 变值 。可见 , 何 如
更精确地检测 应变 , 发展设 计理 论 、 对 保证 安全 运行 和 实 现 自动检测控 制等 都具 有重 要 的作用 和意 义。本 文 中设 计 了一种基于虚拟仪器 的高精度应变测量与报警系统 。
应
变 片
1 研究背景
第3 卷 1
第 5期
四 川 兵 工 学 报
21 0 0年 5月
【 自动化技术】
基 于 Lb IW 的应 变 测 量 与报 警 系统 设计 枭 aVE
苏连 成 , 马 磊, 赵 云
( 燕山大学 电气工程学院 , 河北 秦皇 岛 o6 o ) 6 04 摘要 : 设计 了一种基于虚拟仪器设计软件 L b IW 的动态应变测量 、 aV E 报警系统 , 分析 了电阻应变片式电测法的检 测原理 , 并使用恒流源和 自动调零放大器来提高 仪器 的测 量精度 。用 户可实 时测得应 变值和其 变化情况 , 预 并 先设 置应 变报 警值来达 到对 被测元件 的结构进 行实时监测 的 目的 , 以提高工程 结构的强度 和安全性。该系统 同 时设 计了数据 、 波形的存储功能。系统测量精度高 , 检测效率高 , 作方便、 操 简单易用 。
基于Labview汽车防撞安全驾驶系统设计与仿真

电子技术与软件工程Electronic Technology & Software Engineering软件开发与应用Software Development And Application基于Labview汽车防撞安全驾驶系统设计与仿真徐连成(泰安技师学院电气工程系山东省泰安市271000 )•摘要:本文设计了汽车防撞安全驾驶系统,Labview通过读取侧向红外反射雷达的数据、控制后视镜提示灯闪烁,实现并线辅助;通过读取驾驶位置的酒精浓度、控制声光报警实现防酒驾、醉驾;通过读取前向超声波雷达的数据、控制声光报警,实现主动刹车防撞安 全驾驶;通过读取主动测速模块的数据、辅助实现限速控制。
关键词:Labview;采集卡;传感器;安全驾驶;人机界面;程序框图汽车防撞安全驾驶系统电路就是模拟汽车的主动刹车、并线辅 助、速度限制以及酒精检测等功能。
汽车安全系统主要分为主动安 全系统和被动安全系统,主动刹车系统属于汽车主动安全系统的一 部分,是一种利用通讯技术与电子监测来感应车辆周遭的动态状况,以辅助汽车驾驶人的安全配置。
我们常见的主动安全系统有A B S、ESP、A E B等电子设备。
1系统的总体框架系统的总体框图见图1所示。
系统通过各类传感器模块采集驾 驶环境的距离、酒精浓度、行驶速度等安防信息,信号经整型后通 过m y D A Q数据采集卡传送到Labview监控平台,完成对驾驶环境 的参数的显示、分析、存储、报警功能,并根据参数提示对驾驶环 境的距离、酒精浓度、行驶速度实现自动控制。
2系统硬件设计部分2.1NI myDAQ数据采集器通过L a b v i e w N I m y D A Q设置8个通道采集数据,D I O O接 开始/停止、DI01接设置、D102接加、DI03接减共4个按钮、DI04接右红外反射雷达、DI05接左红外反射雷达检测汽车左右 侧物体、DI06接超声波雷达检测汽车正前方物体汽车主动刹车、D107接酒精检测。
基于LabVIEW系统的汽车驾驶员防困与预警系统

link appraisement王 剑 广东实验中学本文针对国内外汽车疲劳驾驶的检测、提醒装置功能单一、疲劳驾驶评价不能实现智能化及缺少防困功能等问题,设计出一套汽车驾驶员防困系统。
该系统由脑电(Electroencephalogram,简称RIO、喷雾器、小型音响、震动靠枕、LED从而实现有效地保障驾驶员、乘客及周边行人、车辆的安全,极大地降低交通事故。
该系统不仅安装方便,不用改图2 脑电波生物传感器与NI RIO硬件图3 音响图4 喷雾器图5 振动背枕程序:提醒程序分为两个层级,第一层级为语音提醒,提醒乘客驾驶员疲劳驾驶及帮助驾驶员保持清醒的语音“驾驶员疲劳驾驶,请车上的乘客要求驾驶员务必安全靠边停车”,第二层级为发送疲劳驾驶信息到监管部门与在LED显示的文字:驾驶员疲劳驾驶,注意生命安全,请问靠近本车)向周边行人和车辆提醒。
LabVIEW编程程序与NI RIO硬件相结合个性化疲劳脑电特性检测脑电信号是一种由大脑神经元细胞产生的自发性、节律性的非常微弱的生物电信号,蕴含着丰富的人体生理病理信息,并能反映大脑的功能状态,可以通过放置在头皮表面的实验小结:此时特征图中特征点F2与F4幅值比较大。
自觉疲劳时脑电波实时图及特征图3.3.3自觉瞌睡时脑电波实时图及特征图实验小结:特征图形状扭曲很大,特征点F2、F3、F4幅值相比于精神充沛时大幅下降。
瞌睡判定为疲劳驾驶播放音乐后脑电波实时图及特征图实验小结:特征图形状得以回复,特征点F2、F3、F4幅值依然很小。
从性能结果可见,该产品在模拟状态下能有效地判断驾驶员是否疲劳;并在三层级的防困程序中能给驾驶员提神。
创新点1. 采用LabVIEW编程程序与NI RIO硬件相结合个性化疲劳脑电特性检测方案:能为为不同的驾驶员定制较为准确的符合其自身的身体特征、心理特征的疲劳监测。
2. 三层级唤醒模式:通过播放唤醒音乐、喷出提神香水、开动震动背枕三层级唤醒模式去改变驾驶员驾驶环境和心理特征,从而有效地为防止驾驶员犯困。
利用LabVIEW进行智能化交通事故预防与处理

利用LabVIEW进行智能化交通事故预防与处理智能交通系统作为现代城市交通管理的重要组成部分,对于预防与处理交通事故具有重要意义。
本文将介绍利用LabVIEW进行智能化交通事故预防与处理的方法和技术。
一、引言随着城市交通的快速发展和车辆数量的增加,交通事故频繁发生,给人们的生命财产安全造成了严重的威胁。
利用现代信息技术进行交通事故预防与处理成为了迫切需求。
LabVIEW作为一种基于图形化开发环境的编程语言,具有极高的灵活性和可扩展性,适用于各种应用场景,包括智能交通系统。
二、交通事故预防1. 数据采集与处理智能交通系统中,数据采集是关键步骤之一。
通过传感器、摄像头等设备获取交通流量、车辆速度、车辆密度等数据,并利用LabVIEW 进行实时的数据处理和分析。
通过分析车辆行驶状态和交通状况,可以预测交通拥堵、事故易发等情况,从而采取相应的措施进行预防。
2. 信号控制与优化利用LabVIEW可以实现智能交通信号的控制和优化。
根据实时采集的交通数据,LabVIEW可以对信号灯的时长、配时方案进行优化调整,以提高交通流量,减少交通拥堵,降低交通事故的发生概率。
通过智能信号控制,可以实现交通流畅的调度,避免交叉口的拥堵和事故。
3. 车辆监测与识别利用LabVIEW的图像处理模块,可以对交通摄像头拍摄到的车辆图像进行分析和识别,实时监测交通状况。
通过图像处理算法,可以对车辆进行跟踪、计数和识别,判断车辆的类型和运行状态,预测事故的发生可能性。
同时,结合实时的车辆数据,可以对异常行为进行检测和报警,进一步提高交通安全性。
三、交通事故处理1. 事故现场监控与记录在交通事故发生后,利用LabVIEW可以实现事故现场的实时监控与记录。
通过视频监控设备和传感器,获取事故现场的图像、视频、声音等数据,并实时传输到中央监控中心。
利用LabVIEW进行数据解析和处理,可以提取事故发生的时间、地点、车辆信息等关键数据,为事故后续处理提供有力依据。
基于LabVIEW2012的汽车ABS自动测试系统的设计

基于LabVIEW2012的汽车ABS自动测试系统的设计
刘方刚
【期刊名称】《中国机械》
【年(卷),期】2014(000)011
【摘要】本文基于LabVIEW图形化编程语言,设计了一套汽车ABS自动测试系统,实现了车辆制动时车轮转速信号和制动轮缸压力信号的采集。
系统包括硬件和软件两大部分:硬件由传感器、调理电路、数据采集卡和计算机组成;软件部分的相关程序包括对采集信号进行分析处理和存储显示两大部分。
通过对比验证,系统是稳定可靠的。
【总页数】2页(P134-135)
【作者】刘方刚
【作者单位】重庆交通大学
【正文语种】中文
【相关文献】
1.基于LabVIEW的投影机光学性能自动测试系统的设计
2.基于LabVIEW的汽车PEPS自动测试系统的设计
3.一种基于Labview的数字电路自动测试系统设计
4.基于LabWindows/CVI的某应答机自动测试系统设计
5.基于LabVIE W的智能温度直流模件自动测试系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
基于 LABVIEW 车辆防撞预警系统之解决方案

基于 LABVIEW 车辆防撞预警系统之解决方案
汪红;谷菲菲;岳苓水;董振珂;张红光
【期刊名称】《商情》
【年(卷),期】2012(000)051
【摘要】车辆的安全性能被分为两种类型,一种类型称为“主动安全性”,即事
故发生前实施预防,防范于未然。
另一种类型称为“被动安全性”,即事故发生时,对车辆及人员采取保护措施。
通常人们主要对被动安全性这一理念比较重视,现在人们更加重视主动安全性的设计。
本文介绍了基于 LABVIEW 车辆防撞预警系统之解决方案。
【总页数】1页(P179-179)
【作者】汪红;谷菲菲;岳苓水;董振珂;张红光
【作者单位】河北化工医药职业技术学院;河北化工医药职业技术学院;河北化工医
药职业技术学院;河北化工医药职业技术学院;河北化工医药职业技术学院
【正文语种】中文
【相关文献】
1.基于V2V通信技术的车辆防撞预警系统研究 [J], 孙婷婷;刘兆惠;吕明新
2.一种基于模糊运算的车辆防撞预警系统设计 [J], 张福洋;李全彬;;
3.基于无线通信的车辆主动防撞预警系统设计 [J], 周奇智;陶硕文
4.基于LabVIEW的轮式车辆侧翻预警系统研究 [J], 郭成洋;王璐;高泽宁;陈军
5.露天矿车辆无盲区防撞预警系统研究与应用 [J], 刘利杰;黄国君
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
通道及采样参数配置,然后分别采集三角波上升段及下降段对 应的中频信号并送频率测量模块计算出反、丘,中问插入本车
速度测量模块。根据.爪、尼和本车速度y.,可计算出尺、y、和y:, 再根据安全距离模型确定是否报警。初始参数配置完成后,下 面几个处理步骤用LabVIEW中的顺序结构分为4帧.完成一 次处理所需时间约为30 ms,当相对车速为100 km/h时,刷新 一次速度数据产生的距离改变量为0.83 m,基本满足实时测量 要求。用LabVIEW编制的图形化程序如图4所示。
/
张大彪,于化龙:基于LabVIEW的汽车防撞报警系统的设计
2008.44(21)
55
米波雷达和激光雷达三种组成方式。工作在毫米波段的线性调 频连续波(FMCW)雷达与其他两种测量方式相比具有显著的 优点121。其工作频率高、波长短,可有效地缩小波束角度、减小天 线尺寸,电路简单、成本低,尤其适合在恶劣气候条件下工作。 系统选择35 GHz零拍型收发前端组件,其压控振荡器(VCO) 带宽为300 MHz.发射功率20 mW,探测距离大于100 m。
第3帧完成本车速度测量。本车速度l,。采用直接对车速 里程衰传感脉冲计数的方法得到,车速里程表传感器.由安装在 变速箱输出轴上的8只(根据车型不同,也有6只、4只结构) 磁钢和固定在变速箱壳体上的霍尔探头组成。当输出轴旋转 时,每转可产生8个脉冲。将霍尔感应脉冲整形后输入到I>(2I一 16E数据采集卡计数器端口,对板上20 MHz时基脉冲计数,测
56
2008,44(21)
Computer Engineering and Applications计算机工程与应用
(速比:l公里对应的输出轴转数)、a(每转产生脉冲个数)可计 算出^k辨(~为l公里对应的脉冲个数)和1个传感脉冲周期 对应的距离(1 000/N),用此值除以测量到的实际脉冲周期 (1 OoQ/Ⅳ),n,可得到本车速度y。。
虚拟仪器是一种基于计算机的自动化测试系统。虚拟仪器 通过软件将计算机硬件资源与仪器硬件有机地融合为一体,大 大缩小了仪器硬件的成本和体积。LabVlEW(Laboratory Virtu— al Instrument Engineering)是美国国家仪器公司(National In— struments—NI)推出的虚拟仪器软件开发平台181,是一种图形化 编程语言,它具有丰富的函数库,可以完成数据采集、分析、显 示、存储等功能。汽车防碰撞系统工作环境复杂,各种干扰和噪 声会增加信号检测处理的难度。由于虚拟仪器编程灵活。通过 加载不同的信号处理算法,进行实车测量实验,可优选出更高 效的应用程序。
2R/C。其中R为目标与雷达之间距离,C为电磁波传播速度。混
频器输出的中频信号为J‘,ft=(4BR)/(TC)。T为调制三角波周 期.口为发射信号带宽。对于运动目标,反射信号中包含多普勒
频率f。,fa=2V/A。A为发射信号波长,矿为目标相对运动速度。 根据上述关系,可得到距离尺、相对速度V的表达式17】:
尺:虹监!丝
()
8占
,、
y=÷坼.五)
(2)
".tjo
矗以分别为调制信号上升段和下降段对应的中频频率蕊为发
射信号中心频率。
信号采集与处理框图如图3所示,程序运行后,首先进行
第1帧、第2帧分别采集三角波上升段及下降段对应的中 频信号。顺序结构外面几个控件为采集卡配置初始参数。AI Config Vl(硬件配置)通过前面板指定采集卡设备号为l、通道 号为0、缓存区大小为1 000。Ai Sart VI(启动)可按照设定的 采样频率和采样点数启动一次采集。根据中频信号频率范围 (6 KHz~200 KHz)。取采样频率Fs=l MHz,采样点数蜘=l 000。 此时.在频率低端(近距离),仍可采集5个信号周期。AI Sart VI还可以配置触发类型和触发斜率,本设计将触发类型设为 digital A,即使用数字型触发,触发斜率设为rising(上升沿触 发)。AI Read VI(读数据)的作用是从计算机缓存中读取采集 到的1 000个数据点,1、2帧两组读出数据分别由数据线送到 第4帧进行频率测量。AI Clear VI(清除配置)的作用是停止采 集,释放缓存和板上资源。
量两个脉冲之间的时间间隔孔,根据速度里程表技术参数r/
米仟#受 率Ft
硼SCLH
采样点
口口口口口口口口口口口口口口口[ 口口口口口口口口口口垦呈呈呈口j
日
。I I触发斜率
L
I触发斜率
。幽节。画竹■训. :呈口口口口口口口口口口口口口3
W书
数孵
¨132U--
一1触发炎型I|I獭l
豆道寸
I叵重h l触发类型l l_::剜
2汽车防撞报警系统的组成及1=作原理 汽车防撞报警系统的组成如图l所示。系统由收发前端、
调制信号产生、信号调理、数据采集、信号处理及报警显示等部 分组成。调制信号产生电路形成一低频三角波,此三角波送入 压控振荡器(VCO)控制其中心频率矗,经调制的毫米波信号通 过定向耦合器、环形器、天线以一定波束向空间辐射电磁波,遇 到目标后的反射信号经天线、环行器加到混频器,与定向耦合 器来的发射信号混频,差频经信号调理电路放大和滤波后送数 据采集卡,然后送计算机进行分析处理。
Abstract:Aiming at the traffic safety,a warning system for automobile collision avoidance based on virtual instrument is de-
signed.The design method of the system and test data are given simultaneously.The procedure is designed by LabVIEW7.0.The
system adopts FMCW radar sensor and higIl—quality data acquisition board.This system can monitor the distance and velocity f0卜
ward vehicle.It Call give the alarm when the collide danger is predicted,and it can assist the driver to brake control,thus some
关键涧:汽车防撞;虚拟仪器;FMCW雷达;数据采集;报警 DOI:10.3778/j.issn.1002—8331.2008.21.015 文章编号:1002—8331(2008)21—0054—03
文献标识码:A
中图分类争:TP216
1 引斋 近年来,随着我国高速公路的快速发展,交通事故特别是
碰撞性事故呈上升态势。据有关资料显示,在公路交通事故中, 有86%为双车或多车碰撞事故。驾驶员在高速公路长途行驶容 易疲劳,注意力不集中,导致汽车偏离正常路线,夜间或雾天能 见度差,发现前方车辆不及时而导致追尾相撞。研究表明,驾驶 员只要在有碰撞危险前1秒得到报警信号,就可以避免90%的 交通事故【“。为此,作者开发了一种基于虚拟仪器的汽车防碰撞 报警系统,该系统能实时测量对面车辆的距离和速度,在预测 到有碰撞危险时向驾驶员报警,避免碰撞事故的发生。
I设置通道采样参数
' l采集_三角波上升
段中频信号
●
l采集-三角波下降 段中频信号
+
I测量本车速度
●
计算正矗 R,V(VI、V2)
● 计算安全距 离报警控制
图3信号采集与处理程序框图
中频信号 ●一波形
厂]厂] ..同步信号
图2汽车防掩报警系统信号波形圈
对于固定目标,发射信号与回波信号时间差为AT,AT=
正口
I I捎Ji;i:配置 测靖类型J l亏!兰II…。 l
羹 『[I,o'‘_
时牡频率I半IV VI-f,
&簖0
llIl6●卜
丽肾冒 }雁蚓 秽"I画匿目叶》I .圳‰匣晨鼬严I蕊’, l幽 暖作K 一||
1I…………~1. Ot I圃卜』
j口口凸口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口口
信号调理电路由低噪声前置放大器、对数中频放大器和具 有频域动态压缩功能的滤波网络组成。经过调试后,输入信号 在100 mV一0.02 mV范围内变化时,其输出信号幅度被控制在 2.1 V~2.5 V范围内。输入信号动态范围大于80 dB。 3.2信号采集与处理电路
方案选用Nl公司PCI一16E型数据采集卡,该采集卡最高 采样速率为1.25 MHz,输入分辨率12 bit。中频信号接到采集 卡0号通道(ACHO,68脚),本车速度传感器脉冲信号接到采 集卡计数器端口(CTRl一GAT,4l脚),采集同步信号接到采集 卡(PFl0,11脚)。中频信号和同步信号波形如图2所示。
o
作者简介:张大彪(1950-),教授,主要研究方向:虚拟仪器与毫米波测量;于化龙(1967一),副教授,主要研究方向:虚拟仪器与信号检测。
收确H期:2007一lo-16 修I"iH期:2008—01--.02
在装卸搬运时有其特点及方法: 物流装卸搬运的概念:物流装卸搬运 是指在一定的区域内(通常指某一个物流 结点,如车站、码头、仓库等,以改变物 品的存放状态和位置为主要内容的活动。 它是伴随输送和保管而产生的物流活动, 是对运输、保管、包装、流通加工、配送 等物流活动进行衔接的中间环节。 在整个物流活动中,如果强调存放状 态的改变时,一般用“装卸”一词表示;如 果强调空间位置改变时,常用“搬运”一词 表示。物流的各环节和同一环节不同活动 之间,都必须进行装卸搬运作业。所以杭 州搬家公司就是来完成其作业的。正是装 卸搬运活动把物流运动的各个阶段联结起 来,成为连续的流动过程。