QT2440-Linux开发套件
linux qmake 用法
linux qmake 用法QMake是Qt软件开发工具套件中的一个构建工具,它用于自动构建Qt项目并生成相应的构建文件。
它以简洁的语法和易于使用的方式帮助开发人员管理和组织项目代码。
在本文中,我们将介绍QMake的基本用法以及一些相关的参考内容。
1. 基本语法QMake的语法相对简洁,使用.pro文件来描述项目的构建规则。
一个典型的.pro文件包含以下几个部分:- CONFIG: 用于设置编译和构建的配置选项,比如debug、release、static、shared等。
- HEADERS: 用于指定项目中的头文件。
- SOURCES: 用于指定项目中的源代码文件。
- LIBS: 用于指定项目所依赖的第三方库。
- TARGET: 用于指定生成的可执行文件或库的名称。
- TEMPLATE: 用于指定构建的模板,可以是app、lib或subdirs。
- INCLUDEPATH: 用于指定头文件的搜索路径。
- DEPENDPATH: 用于指定依赖库的搜索路径。
- DESTDIR: 用于指定生成文件的输出目录。
- QMAKE_CXXFLAGS: 用于指定编译器的附加选项。
- QMAKE_LFLAGS: 用于指定链接器的附加选项。
2. 命令行工具QMake可以通过命令行工具进行使用和调用。
在命令行中,可以使用qmake命令来执行.pro文件并生成相应的构建文件。
例如:```qmake -o Makefile myproject.pro```这将根据myproject.pro文件生成一个名为Makefile的构建文件。
3. 变量和函数QMake支持对变量进行赋值和引用,并且提供了一些内置函数来处理和操作这些变量。
以下是一些常用的变量和函数:- equals(VAR, val): 判断变量VAR是否等于val。
- contains(VAR, val): 判断变量VAR中是否包含val。
- scope(exit, command): 在作用域结束时执行command。
tq2440开发板使用手册
TQ2440开发板使用手册包含以下内容:一、硬件概述1. 开发板简介:TQ2440是一款基于Samsung S3C2440A处理器的ARM9开发板,配备了丰富的外围接口和扩展资源,适用于嵌入式系统学习和开发。
2. 硬件资源:TQ2440开发板提供了多种硬件资源,包括存储器、GPIO、UART、I2C、SPI、ADC、PWM、SD卡接口等。
3. 开发板结构:介绍了开发板的布局、主要芯片和接口的位置及功能。
二、开发环境搭建1. 开发工具:介绍了用于TQ2440开发板的开发工具,如交叉编译器、调试器等。
2. 开发环境配置:详细说明了如何配置开发环境,包括安装交叉编译器、设置环境变量等。
3. 编译和烧写程序:介绍了如何编译和烧写程序到TQ2440开发板上。
三、基础实验1. LED实验:通过控制GPIO口实现LED灯的亮灭。
2. UART实验:通过UART接口实现串口通信,可以与其他设备或电脑进行数据传输。
3. ADC实验:通过ADC接口采集模拟信号,并将其转换为数字信号进行处理。
4. PWM实验:通过PWM接口生成脉冲宽度调制信号,可用于电机控制等应用。
5. I2C实验:通过I2C接口实现与I2C设备的通信,如EEPROM、温度传感器等。
6. SPI实验:通过SPI接口实现与SPI设备的通信,如SD卡、FLASH等。
7. 中断实验:介绍了如何使用中断服务程序处理外部事件或定时任务。
8. SDRAM实验:通过操作SDRAM实现大容量数据的存储和访问。
9. FLASH实验:通过操作FLASH实现程序的固化和数据的非易失性存储。
四、高级应用1. Linux系统移植:介绍了如何在TQ2440开发板上移植Linux 操作系统。
2. 文件系统操作:介绍了如何在TQ2440开发板上实现文件系统的挂载和操作。
3. 网络通信:介绍了如何在TQ2440开发板上实现网络通信功能,包括以太网和WIFI等。
4. USB设备驱动:介绍了如何在TQ2440开发板上实现USB设备的驱动和应用。
飞凌2440QT移植

QT4移植到FL2440开发板的详细过程(转载并加以修改)不知道是大家的系统环境不同还是网友们打错字了,我在网上找了不下十篇有关QT移植的文档。
文档大部分相同,但有一些不一样,但我全都试了,都有一些小问题!后来我一篇文档为主,其他文档为辅,对比错误,修改文档,得出这个适合我自己移植QT的完整版,这供大家参考!因为我的板子是飞凌的2440开发板。
网上关于qt4移植到飞凌2440的文章并不是很多,其中移植这部分我也走了很多弯路,遇到很多问题,但最后还是搞出来了,其实这过去也有快一个月了,那个时候也没时间写文章,但为了跟大家一同学习,今天特花了点时间把前面的经验写下来,希望能帮到各位,好了下面就开始我们的移植之旅吧!一、系统环境(蓝色是我的配置)宿主机:window xp sp3虚拟机linux centOS 或者fedora9,10linux编译器(交叉编译器):arm-linux-gcc 3.4.1开发板:飞凌2440--LCD 3.5寸系统linux-2.6.24(2.6.28也可以)2.6.12文件系统为yaffs系统所需软件包:arm-linux-gcc-3.4.1.tar.bz2 下载地址:/download/projects/toolchain/arm-linux-gcc-3.4.1.tar.bz2qt-embedded-linux-opensource-src-4.5.3.tar.gz下载地址大家到网上搜一下就出来了。
tslib-1.4.tar.gz(用于触摸验证)说明:说明一下这里为什么选择这些软件,首先fl2440板子需要编译器可以是2.95.3也可以使3.4.1这里我只是试了这两个,可能其他的也可以。
而qt/embeded则是我随便下了一个。
补充:这里为了说的完整些,我把qt的各版本也给大家说一下,关于Qt,Qt/E,Qtopia Core, Qtopia。
Qt泛指Qt的所有桌面版本,比如Qt/X11,Qt Windows,Qt Mac等。
linux在TQ2440上移植6--完善串口驱动
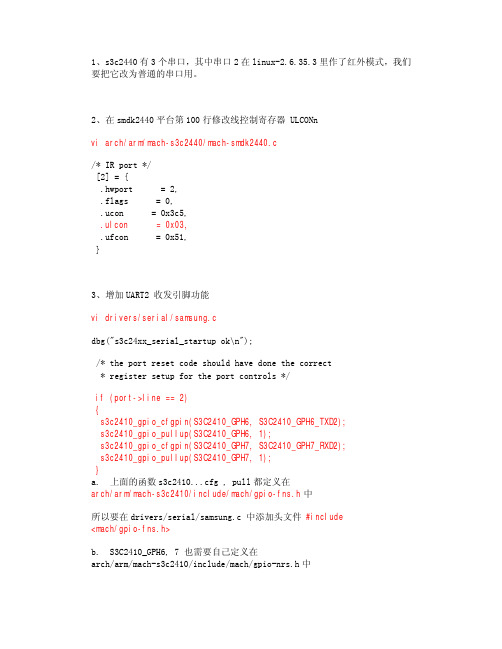
1、s3c2440有3个串口,其中串口2在linux-2.6.35.3里作了红外模式,我们要把它改为普通的串口用。
2、在smdk2440平台第100行修改线控制寄存器 ULCONnvi arch/arm/mach-s3c2440/mach-smdk2440.c/* IR port */[2] = {.hwport = 2,.flags = 0,.ucon = 0x3c5,.ulcon = 0x03,.ufcon = 0x51,}3、增加UART2 收发引脚功能vi drivers/serial/samsung.cdbg("s3c24xx_serial_startup ok\n");/* the port reset code should have done the correct* register setup for the port controls */if (port->line == 2){s3c2410_gpio_cfgpin(S3C2410_GPH6, S3C2410_GPH6_TXD2);s3c2410_gpio_pullup(S3C2410_GPH6, 1);s3c2410_gpio_cfgpin(S3C2410_GPH7, S3C2410_GPH7_RXD2); s3c2410_gpio_pullup(S3C2410_GPH7, 1);}a. 上面的函数s3c2410...cfg , pull都定义在arch/arm/mach-s3c2410/include/mach/gpio-fns.h中所以要在drivers/serial/samsung.c 中添加头文件 #include<mach/gpio-fns.h>b. S3C2410_GPH6, 7 也需要自己定义在arch/arm/mach-s3c2410/include/mach/gpio-nrs.h中#define S3C2410_GPH6 S3C2410_GPH(6)#define S3C2410_GPH7 S3C2410_GPH(7)同样也要在drivers/serial/samsung.c 中添加头文件 #include<mach/gpio-nrs.h>c. S3C2410_GPH6_TXD2S3C2410_GPH7_RXD2定义在arch/arm/mach-s3c2410/include/mach/regs-gpio.h同样也要在drivers/serial/samsung.c 中添加头文件 #include<mach/regs-gpio.h>4、下面还有一个重要的数据结构第889行static struct uart_driver s3c24xx_uart_drv = {.owner = THIS_MODULE,.dev_name = "s3c2410_serial", //这个是串口设备的名称,必须和文件系统的inittab里控制台的名称相对应.nr = CONFIG_SERIAL_SAMSUNG_UARTS,.cons = S3C24XX_SERIAL_CONSOLE,.driver_name = S3C24XX_SERIAL_NAME,.major = S3C24XX_SERIAL_MAJOR,.minor = S3C24XX_SERIAL_MINOR,};5、make menuconfigDdvices Drivers --->Character devices --->Serial Drivers --->1、s3c2440有3个串口,其中串口2在linux-2.6.35.3里作了红外模式,我们要把它改为普通的串口用。
在Linux操作系统上进行Qt开发
在Linux操作系统上进行Qt开发随着计算机科学和技术的迅速发展,软件开发在我们日常生活中扮演着越来越重要的角色。
而在软件开发领域中,Qt框架是一个备受推崇的选择。
1. 简介Qt是一种跨平台的应用程序开发框架,可以在Linux、Windows和Mac等操作系统上进行开发。
它提供了丰富的工具和库,使开发者能够轻松构建出跨平台的应用程序。
2. Linux操作系统Linux是一种自由开源的操作系统,它以其稳定性和安全性而闻名。
对于Qt开发来说,Linux提供了一个理想的开发环境。
2.1 安装Qt首先,我们需要在Linux操作系统上安装Qt。
可以从Qt官方网站下载适用于Linux的Qt安装程序,并按照提示进行安装。
2.2 配置开发环境安装完成后,我们需要配置Qt开发环境。
在终端中输入以下命令,将Qt添加到系统路径中:```export PATH=$PATH:/path/to/qt/bin```这样,我们就能够在任何位置运行Qt开发工具。
3. Qt开发工具Qt提供了一系列开发工具,使我们能够高效地进行软件开发。
3.1 Qt CreatorQt Creator是一个集成开发环境(IDE),具有代码编辑、调试和构建等功能。
它提供了一个直观的界面,使我们能够轻松创建和管理项目。
3.2 Qt DesignerQt Designer是Qt的可视化界面设计器,可帮助我们设计GUI界面。
它提供了丰富的界面组件和布局工具,使我们能够快速创建出漂亮的界面。
4. Qt应用程序的创建和编译在Qt Creator中,我们可以创建一个新的Qt项目。
选择适当的项目模板,并按照向导的指示进行配置。
在项目中,我们可以使用C++或Qt自身的脚本语言QML进行编码。
在代码编写完成后,我们可以使用Qt Creator进行编译和构建。
它会自动处理依赖关系,并生成可执行文件。
5. 调试和测试在Qt Creator中,我们可以使用调试器进行调试。
它提供了断点、变量监视和堆栈跟踪等功能,帮助我们追踪和修复程序中的错误。
AC2440开发系统Linux使用手册
嵌 入 式 系 统 开 发 套 件AC-2440技术文档杭州先控信息科技有限公司目 录1. utu Linux相关软件功能 (1)1.1. 系统启动 (1)1.2. 通过串口与PC传送文件 (2)1.2.1 使用sz命令向PC机传送文件 (2)1.2.2 使用rz命令接受PC机传送过来的文件 (2)1.3. 如何通过FTP与PC传送文件 (3)1.4. 如何挂载U盘/移动硬盘 (4)1.5. 测试SD/MMC卡 (5)1.6. 测试音频 (5)1.7. 如何中止程序运行 (6)1.8. Usb摄像头的使用 (6)1.8.1 如何将usb摄像头的视频显示在LCD液晶屏上 (6)1.8.2 PC机端使用浏览器访问摄像头 (7)1.9. 测试简单网络功能 (8)1.9.1 Ping命令 (8)1.9.2 PC机使用Telnet命令登录开发板 (9)1.10. 实时时钟设置和保存 (10)1.11. 如何DHCP动态获取IP地址和DNS (10)1.12. 如何连接互联网 (10)1.12.1 使用Telnet在终端登录清华BBS (10)1.12.2 使用浏览器在浏览网页 (11)1.13. 如何开机自动运行程序 (11)2. 如何快速为开发板安装Linux系统 (12)2.1. 安装PC端tftp软件 (12)2.2. 下载utu-bootloader文件u-boot.bin (13)2.2.1 用并口下载u-boot.bin (13)2.2.2 用网络下载u-boot.bin (14)2.3. 网络更新内核文件uImage (16)2.4. 网络更新yaffs文件系统映像 (16)3. 建立Linux下的开发环境 (18)3.1. 建立编译环境 (18)3.2. 建立NFS(网络文件系统)服务器 (19)4. 如何为目标板上的linux 编译用户程序 (19)4.1. 如何编译按键测试程序 (19)4.2. 如何把编译好的程序传到目标板上运行 (19)4.2.1 nfs挂载方式启动开发板的utu-linux (20)4.2.2 把编译好的文件拷贝到开发板的flash上 (21)4.2.3 用nfs启动方式更新整个utu-linux文件系统 (22)5. 编译内核(使用3.4.1的交叉编译器) (25)5.1. 装载默认配置参数 (25)5.2. 执行下面的命令来生成内核映像 (26)5.3. 定制linux内核 (27)5.3.1 如何配置CPU (28)5.3.2 如何配置各个尺寸的LCD 驱动支持 (29)5.3.3 如何配置触摸屏 (31)5.3.4 如何配置USB 鼠标和键盘 (34)5.3.5 如何配置两个USB主口的支持 (35)5.3.6 如何配置优盘的支持 (36)5.3.7 如何配置网眼和中芯微等USB 摄像头 (37)5.3.8 如何配置CS8900 网卡驱动 (39)5.3.9 如何配置声卡驱动 (42)5.3.10 如何配置SD/MMC 卡驱动 (45)5.3.11 如何配置LED 驱动 (46)5.3.12 如何配置串口驱动 (47)5.3.13 如何配置RTC 实时时钟驱动 (47)5.3.14 如何配置yaffs 文件系统的支持 (48)5.3.15 如何配置EXT2/VFAT/ NFS 等文件系统 (50)5.3.16 开机画面的logo文件 (53)6. 编译Qtopia和QT应用程序Hello,World (53)6.1. 编译Qtopia (53)6.2. 编译基于Qtopia的Hello World应用程序 (53)7. 如何建立yaffs文件系统映像 (54)1.utu Linux相关软件功能1.1. 系统启动Windows下的超级终端详细的使用方法请用户自己参考相关资料,这里不再详述。
linux qt 开发流程
linux qt 开发流程Linux Qt是一种开发平台,它能让开发者们在Linux操作系统上轻松创建跨平台的图形界面应用程序。
为了保证一个高效和顺畅的开发过程,以下是Linux Qt开发的一般流程:1. 安装Qt框架:首先,您需要在Linux系统上安装Qt开发环境。
您可以从Qt官方网站下载并安装适合您平台的Qt版本。
2. 创建项目:在开始任何Qt开发之前,您需要创建一个新的Qt项目。
通过Qt Creator或者使用终端命令创建一个新的项目目录。
3. 编写代码:使用Qt Creator或者您喜欢的文本编辑器,打开项目文件并开始编写代码。
Qt使用C++语言开发,所以您需要熟悉C++编程语言。
在编写代码时,您可以使用Qt提供的丰富的类和库来创建界面和处理用户交互。
4. 设计用户界面:在Qt Creator中,您可以使用可视化设计器来设计应用程序的用户界面。
通过拖放方式选择和布置UI元素,然后通过属性编辑器设置各个元素的属性和样式。
您也可以使用Qt的布局管理器来自动调整UI元素的大小和位置。
5. 编译项目:完成代码编写和界面设计后,使用Qt Creator或者终端命令进行项目编译。
Qt提供了一个强大的构建系统,名为qmake,它可以根据项目文件自动配置和管理编译过程。
6. 调试和测试:在编译成功后,您可以使用Qt Creator提供的调试工具对应用程序进行调试。
您可以设置断点、观察变量和执行单步调试来定位和解决代码中的问题。
此外,您还可以编写单元测试来确保代码的正确性和稳定性。
7. 运行和部署:一旦应用程序编译和调试完成,您可以在Linux上运行应用程序来测试其功能。
如果一切正常,您可以使用Qt提供的工具将应用程序打包为可执行文件或者创建Linux安装包。
这样您就可以轻松地部署和分享您的应用程序。
通过按照上述流程进行开发,您可以利用Linux Qt轻松开发出高性能、跨平台的图形界面应用程序。
希望这些信息对您有所帮助,祝您在Linux Qt开发中取得成功!。
2440超详细U-BOOT(UBoot介绍+H-jtag使用+Uboot使用)

凌FL2440超详细U-BOOT作业(UBoot介绍+H-jtag使用+Uboot使用)Bootloader是高端嵌入式系统开发不可或缺的部分。
它是在操作系统内核启动之前运行的一段小程序。
通过这段小程序,我们可以初始化硬件设备、建立内存空间的映射图,从而将系统的软硬件环境带到一个合适的状态,以便为最终调用操作系统内核准备好正确的环境。
现在主流的bootloader有U-BOOT、vivi、Eboot等。
本次作业先做Uboot的烧写吧。
希望通过这个帖子,能让更多的初学者朋友了解一些UBoot的知识,也希望高手朋友对我的不足予以斧正。
首先说一下什么是Uboot:U-Boot,全称Universal Boot Loader,是遵循GPL条款的开放源码项目。
从FAD SROM、8xxROM、PPCBOOT逐步发展演化而来。
其源码目录、编译形式与Linux内核很相似,事实上,不少U-Boot源码就是相应的Linux内核源程序的简化,尤其是一些设备的驱动程序,这从U-Boot源码的注释中能体现这一点。
但是U-Boot不仅仅支持嵌入式Linu x系统的引导,当前,它还支持NetBSD, VxWorks, QNX, RTEMS, ARTOS, LynxOS嵌入式操作系统。
其目前要支持的目标操作系统是OpenBSD, NetBSD, FreeBSD,4.4BSD, Linux, SVR4, Esix, Solaris, Irix, SCO, Dell, NCR, VxWorks, LynxOS, pSOS, QNX, RTEMS, ARTOS。
这是U-Boot中Universal的一层含义,另外一层含义则是U-Boot除了支持PowerPC系列的处理器外,还能支持MIPS、x86、ARM、NIOS、XScale等诸多常用系列的处理器。
这两个特点正是U-Boot项目的开发目标,即支持尽可能多的嵌入式处理器和嵌入式操作系统。
linuxdeployqt
linuxdeployqtlinuxdeployqt是一个基于qt框架的开源开发工具,它可以将qt程序部署到Linux平台上。
本文旨在介绍linuxdeployqt的基本使用方法。
linuxdeployqt是一种快速、高效的Linux下qt部署工具,它能够部署Qt应用程序,能够在多个Linux发行版中使用。
它支持用户自定义Linux发行版安装程序根目录,可以将qt应用程序安装到任何位置。
此外,它还支持在Linux中对Qt插件、图标、文档、主题、字体进行安装。
使用linuxdeployqt部署qt应用程序,可以分为三个步骤:第一步,安装linuxdeployqt。
可以使用git clone的方式从github上获取linuxdeployqt源代码,也可以从各种Linux发行版自带的软件仓库中获取它的安装包,然后使用dpkg或者rpm来安装它。
安装完成后,就可以在命令行终端中使用linuxdeployqt命令来运行它了。
第二步,准备Qt应用程序部署包。
可以使用Ubuntu Make或Qt Creator来打包Qt应用程序。
需要注意的是,在部署包中,需要包含Qt应用程序的源代码文件以及编译出来的可执行文件。
第三步,执行部署命令,使用linuxdeployqt来部署Qt应用程序。
部署命令格式如下:linuxdeployqt程序路径> [应用程序名] [参数...] 通过以上三步,Qt应用程序就能够发布到Linux平台上了。
linuxdeployqt有许多参数,可以帮助用户自定义Qt应用程序的部署过程。
例如,使用--appimage参数可以将Qt应用程序打包成独立的AppImage格式,不需要依赖其他文件,也可以支持跨平台部署;--qmldir参数可以指定要部署的QML文件的目录;--libdir参数可以指定要部署的库的目录;--plugindir参数可以指定要部署的插件的目录;--icon参数可以指定应用程序的图标;--installer参数可以指定要生成的Linux安装包的文件夹名称等等。
2440_Linux系统移植

IT_2440Linux系统开发移植一.软硬件配置(1)目标板硬件环境CPU:S3C2440ALSDRAM:SamSung K4S561632HNand flash:K9F1208(64MB)以太网芯片:DM9000LCD:Toshiba LPM084P3638.4’接口:USB;PWM控制蜂鸣器;网络接口;UART;键盘(2)目标板软件环境Linux操作系统内核版本:Linux2.6.12Bootloader:优龙viviQtopia版本:1.7.0Qt版本:2.3.7内核交叉编译工具:ARM-Linux-GCC3.4.1Qtopia交叉编译工具:ARM-Linux–Gcc3.3.2Busybox编译版本:1.1.3二.开发流程B ootloader启动代码移植使用优龙的vivi启动代码操作步骤如下:1)将优龙的源代码拷贝到指定目录;C:\桌面\开发镜像\it24402)打开ADS v1.2编译软件,点击file→打开IT2440A_bios.mcp→打开nand.c3)修改Nand Flash的分配系统空间大小,如图(1)所示,找到结构体函数,static struck partition NandPart修改如下。
注意:修改后需要保存。
图(1)4)Nand flash映射到SDRAM中需要修改SDRAM导入的地址空间大小和载入的初始地址。
修改如下:(1)打开ADS v1.2编译软件,点击file→打开IT2440A_bios.mcp→打开u2440mon.c 修改如下:(2)打开ADS v1.2编译软件,点击file→打开IT2440A_bios.mcp→打开nand.c修改如下:对于NAND FLASH修改不光只是修改NAND FLASH对整个系统空间的分配大小,还要修改载入到SDRAM的地址和空间大小,大小要与NAND FLASH大小分配相匹配。
修改后才能载入nand flash分配空间大小。
基于S3C2440-Linux的视频传输系统设计

中图分类号 :T 36 1 P 1. 8
文献标识码 :A
文章编号 :10 — 59( 02 卜0 4— 2 0 7 99 2 1 )0 11 0
De i n o d o Tr n m iso y tm s d o 3 4 0 Li u sg f Vi e a s s i n S se Ba e n S C2 4 一 n x
( )A M L n x 境搭 建 二 R — iu 环 本 为 1n x2 63. 。下 载好 内核 iu 一 ..0 9 后 , 改 内核 中 Mk f l 文件 , 修 a ei e 使之 适应 ¥C 40需要 。然 后在 3 24 终 端 环 境 下 重 新 配 置 内 核 , 本 系 统 中 配 置 内 核 采 用 m k ae m n cn i 。配 置好 内核 后重 新编 译 内核 即可 。 eu of g ( )视 频采 集模 块 三 本 部分 的实现主要用 到一个协 议 ,叫作 vdofrlnx简称 ie o iu VL 4 ,现在发 展到 VL ,是 lnx影像 系统与嵌入 式影像 的基础 , 42 iu 是 lnx en l里 支持影像 设备 的一 组 A I它 方便 的为驱动层和 iu re K P, 用户 层提供接 口函数 , 以便我们 可 以调用 就可 以操 作相应 的硬件 。 L nx系统 中,视频设备被 当做一 个设备文件 来看待 ,设备文 iu 件存 放在/ e 目录 下,我这个 视频设备 查询获得 为 : d vv do dv / e/ ie O (R 板下 为 /e/ ie 1。 AM dv vdo )操作这个 设备其实和 写字符 驱动 函数 很相 似 ,但 不一样 ,因为采集 视频过程要 遵循这个 协议 , 采 集视 频流 程大 致为 :打 开视频 设 备 ,设置视 频 设备属 性 以 及 采集 方式 、视 频数据 处 理 ,关 闭视 频 设备 。具体 操作 如下 : 1用非 阻塞 模式 打开 摄像 头设备 .
linux +qt4.7+opencv2.2移植到tq2440开发板
linux +qt4.7+opencv2.2移植到tq2440开发板以下操作在Fedora下使用超级用户进行我已经安装了交叉编译器arm-linux-gcc 4.3.3和qt4.5的x86和arm版本在目录/opt/EmbedSky下。
修改配置文件/etc/profile 添加pathmunge /opt/EmbedSky/4.3.3/bin安装CMakeOpenCV 2.1的版本,必须使用CMake创建Makefile。
我使用的CMake版本是2.6-Linux-i386的,是fedora 通过软件添加和载卸功能添加的(这个cmake要重新安装,而且要添加bin进去路径)编译OpenCV:1、解压OpenCV 2.1到/opt/EmbedSky/OpenCV-2.1.0目录下2、在超级用户下,运行cmake-gui命令选择源代码目录:/opt/EmbedSky/OpenCV-2.1.0选择Build目录:/home/pww71/opencv-arm/点击Configure,保持generator为Unix Makefiles,选择Specify options for cross-compiling,点击Next Operating System填写arm-inuxC Compilers选择/opt/EmbedSky/4.3.3/bin/arm-linux-gccC++ Compilers选择/opt/EmbedSky/4.3.3/bin/arm-linux-g++程序库的Target Root填写/opt/EmbedSky/4.3.3/,然后点击Finish修改默认配置,X86-opencv的cmake配置添加BUILD_EXAMPLES 和OPENCV_BUILD_3RDPARTY_LIBS 前面的日志已经介绍过了arm-opencv的cmake配置不要加BUILD_EXAMPLES 和OPENCV_BUILD_3RDPARTY_LIBS 和去掉WITH_TIFFCMAKE_EXE_LINKER_FLAGS原来为空,加上-lpthread -lrtx86的opencv默认安装目录为/usr/local,对于arm的交叉编译的库来说并不合适,所以把CMAKE_INSTALL_PREFIX变量改为/usr/local/arm/lib/opencv/没有安装tiff图像的支持,去掉WITH_TIFF点击Generate生成Makefile3、使用超级用户进入目录/home/pww71/opencv-arm,运行make编译opencv4、运行make install,将opencv生成的库和头文件安装到目录/usr/local/arm/lib/opencv/QT的配置已经解压和安装了qt4.5的x86的库和arm交叉交叉编译的库安装qtcreator时记得安装地址并且修改配置文件/etc/profile 添加上qtcreator的安装地址的bin目录我的是pathmunge pathmunge /opt/EmbedSky/qtcreator-1.3.0/bin为了能找到qmake 还要添加路径pathmunge /opt/EmbedSky/qt-4.5/_install/x86/binpathmunge /opt/EmbedSky/qt-4.5/_install/am/bin到配置文件/etc/profile中使用超级用户输入命令source /etc/profile 后再执行qtcreator命令打开Qtcreator界面进入Tools-Options左侧选择QT4-Qt Versions 右侧选项里:如果通过软件添加和载卸工具添加了qt4的话Auto-detected会自动的选择Qt in PATH /usr/local/bin/qmake-qt4 用这个qmake工具生成的可执行文件不用添加-qws命令行参数自己安装的qt4.5 我是如下配置Qt in PATH /opt/EmbedSky/qt-4.5/_install/arm/bin/qmake添加Manual x86-qt-4.5.0 /opt/EmbedSky/qt-4.5/_install/x86/bin/qmake生成的可执行文件需要添加-qws命令行参数分别点击rebuild 最后点击okBuild Settings 中根据需要Add刚才配置的选择BUild configuration for ... 也选择相应的选项在QT工程文件.Pro中添加以下内容INCLUDEPATH += /usr/local/include/opencvLIBS += /usr/local/lib/libcv.so \/usr/local/lib/libcvaux.so \/usr/local/lib/libcxcore.so \/usr/local/lib/libhighgui.so \/usr/local/lib/libml.sopc仿真必须将以上库还要添加到项目文件夹里如果是arm开发板的程序则添加以下内容INCLUDEPATH += /usr/local/arm/lib/opencv/include/opencvLIBS += /usr/local/arm/lib/opencv/lib/libcv.so \/usr/local/arm/lib/opencv/lib/libcvaux.so \/usr/local/arm/lib/opencv/lib/libcxcore.so \/usr/local/arm/lib/opencv/lib/libhighgui.so \/usr/local/arm/lib/opencv/lib/libml.so编译生成可执行文件移植到开发板提示缺少什么库就按提示添加相应的图像库到lib中以及qt4.5的库和字体都添加到相应的目录中中间有一个这个提示QWSDisplay::Data::init: Invalid argumentClient can't attach to main ram memory.Aborted这个是表示缺少命令行参数-qws是Qt4的问题运行命令添加该参数ok一切正常注意的是qtcreator。
基于TQ2440开发板的Linux-2.6.30.4的网络摄像机的实现

广州天嵌计算机科技有限公司荣誉出品 首发网站:
天 嵌 科
广州天嵌计算机科技有限公司
地址:广东省广州市天河区五山路 141 号尚德大厦 A2004 室 邮编:510000 电话:020-38921445 020-22106679 传真:020-38921445 www. embedsky .net 论坛:http:// bbs .embedsky. net E-mail: tq_668@ 官方网站:http:// http://www. www.embedsky embedsky. http://bbs bbs.embedsky.
技
Step 1:Linux-2.6.30.4 内核配置
在 Linux-2.6.30.4 的内核中,我们没有从外部移植 USB 摄像头的驱动,而直接采用了内核自带的 USB 摄像头驱动,那么我们以前针对 USB 摄像头做的网络摄像头控制程序就不能使用了(原来的 servfox 代码 需要修改) ,下面我们使用新的方法实现网络摄像机功能。 注意:在我们提供的默认配置单中只添加了对 ZC301 系列摄像头的配置,如果您要添加对别的摄像头的支 持,只需要在如下的配置单中选择上对应的配置选项即可。 配置单如下: (红色部分所示) Device Drivers ---> Multimedia devices ---> *** Multimedia core support *** <*> Video For Linux [*] Enable Video For Linux API 1 (DEPRECATED) [*] Video capture adapters ---> --- Video capture adapters <*> OV9650 Drivers for EmbedSky SKY2440/TQ2440 Board [*] V4L USB devices ---> --- V4L USB devices <*> USB Video Class (UVC) [*] UVC input events device support <*> GSPCA based webcams ---> --- GSPCA based webcams < > ALi USB m5602 Camera Driver < > STV06XX USB Camera Driver < > Conexant Camera Driver < > Etoms USB Camera Driver < > Fujifilm FinePix USB V4L2 driver < > Mars USB Camera Driver < > Mars-Semi MR97310A USB Camera Driver < > OV519 USB Camera Driver < > OV534 USB Camera Driver < > Pixart PAC207 USB Camera Driver < > Pixart PAC7311 USB Camera Driver < > SONIX Bayer USB Camera Driver < > SONIX JPEG USB Camera Driver < > SPCA500 USB Camera Driver < > SPCA501 USB Camera Driver < > SPCA505 USB Camera Driver < > SPCA506 USB Camera Driver < > SPCA508 USB Camera Driver < > SPCA561 USB Camera Driver
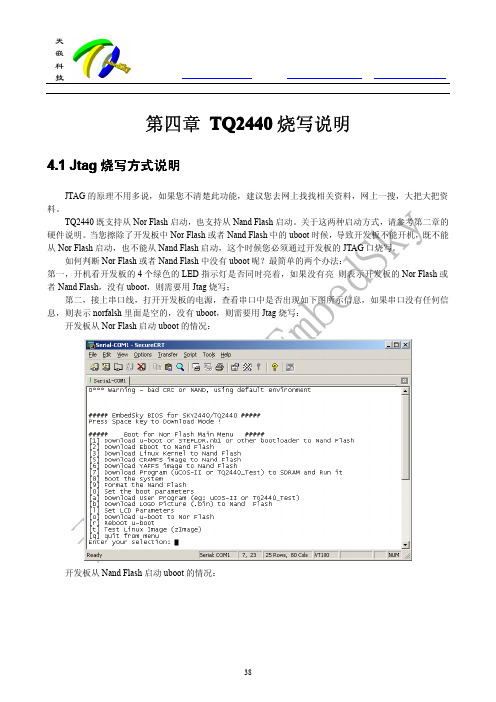
TQ2440烧写uboot全过程
39
天 嵌 科
广州天嵌计算机科技有限公司
地址:广东省广州市天河区五山路 141 号尚德大厦 A2004 室 邮编:510000 电话:020-38921445(销售) 020-22106679 (技术支持) 传真:020-38921445 www. embedsky .net 或 http://www. www.embedsky embedsky. E-mail: support@ 官方网站:http://
技
� 烧写镜像到 Nand Flash 依次选择 “0”;“0”;“0”;如下图
等待几分钟,即可成功烧写 Nand Flash:
40
天 嵌 科
广州天嵌计算机科技有限公司
地址:广东省广州市天河区五山路 141 号尚德大厦 A2004 室 邮编:510000 电话:020-38921445(销售) 020-22106679 (技术支持) 传真:020-38921445 www. embedsky .net 或 http://www. www.embedsky embedsky. E-mail: support@ 官方网站:http://
技
等待几分钟,即可成功烧写 Nor Flash :
42
天 嵌 科
广州天嵌计算机科技有限公司
地址:广东省广州市天河区五山路 141 号尚德大厦 A2004 室 邮编:510000 电话:020-38921445(销售) 020-22106679 (技术支持) 传真:020-38921445 www. embedsky .net 或 http://www. www.embedsky embedsky. E-mail: support@ 官方网站:http://
技
JZ2440开发板使用手册

百问网·精智JZ2440使用手册提示:除了QT外,可以不看本手册,参考《嵌入式Linux应用开发完全手册》及视频即可第1章嵌入式Linux开发环境构建 (4)1.1 安装Ubuntu 9.10 (4)1.1.1 安装VMware (4)1.1.2 安装Ubuntu 9.10 (13)1.2 安装Ubuntu下的开发工具 (20)1.3 安装Windows下的开发工具 (22)第2章精智JZ2440开发板烧写程序方法 (23)2.1 使用JTAG工具烧写开发板 (23)2.1.1 Windows下并口JTAG驱动安装 (23)2.1.2 Windows下OpenJTAG驱动安装 (29)2.1.3 Ubuntu下驱动程序的安装 (29)2.1.4 JTAG烧写软件oflash的用法 (29)2.2 通过u-boot烧写整个系统 (29)2.2.1 在Windows下使用dnw和u-boot烧写系统 (30)2.2.2 在Linux下使用dnw和u-boot烧写系统 (31)第3章板上Linux系统搭建 (33)3.1 修改、编译、使用u-boot (33)3.1.1 使用补丁修改、编译u-boot (33)3.1.2 u-boot使用方法 (33)3.2 修改、编译、使用Linux内核 (36)3.2.1 使用补丁修改、编译内核 (36)3.2.2 使用uImage (36)3.3 修改、编译QT (36)3.3.1 编译依赖的软件 (36)3.3.2 使用补丁修改、编译QT (39)3.4 构造根文件系统 (39)3.4.1 基于最小根文件系统制作QT文件系统 (39)3.4.2 制作YAFFS2、JFFS2文件系统映象文件 (42)第1章 嵌入式Linux开发环境构建1.1 安装Ubuntu 9.10注意:如果使用光盘上已经制作好的虚拟机,那么1.1或1.2的内容可以忽略。
《嵌入式Linux应用开发完全手册》里使用的主机开发环境是Ubuntu 7.10,现在最新的Ubuntu版本是9.10。
嵌入式linux qt开发命令行程序
嵌入式Linux Qt开发命令行程序通常需要以下步骤:
1. 安装Qt开发环境:首先需要在嵌入式Linux系统上安装Qt开发环境。
可以通过包管理器(如apt、yum等)或者从官方网站下载源码进行编译安装。
2. 创建Qt项目:使用Qt Creator创建一个新的Qt项目,选择相应的模板(如桌面应用程序、嵌入式应用程序等)。
3. 编写代码:在项目中编写相应的C++代码,实现所需的功能。
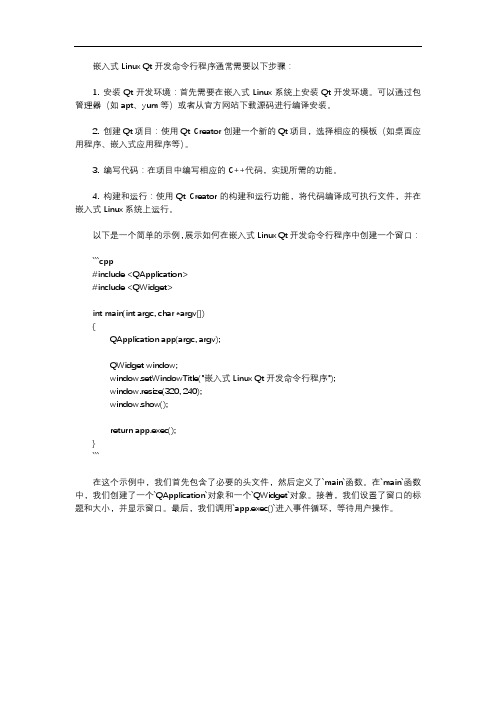
4. 构建和运行:使用Qt Creator的构建和运行功能,将代码编译成可执行文件,并在嵌入式Linux系统上运行。
以下是一个简单的示例,展示如何在嵌入式Linux Qt开发命令行程序中创建一个窗口:
```cpp
#include <QApplication>
#include <QWidget>
int main(int argc, char *argv[])
{
QApplication app(argc, argv);
QWidget window;
window.setWindowTitle("嵌入式Linux Qt开发命令行程序");
window.resize(320, 240);
window.show();
return app.exec();
}
```
在这个示例中,我们首先包含了必要的头文件,然后定义了`main`函数。
在`main`函数中,我们创建了一个`QApplication`对象和一个`QWidget`对象。
接着,我们设置了窗口的标题和大小,并显示窗口。
最后,我们调用`app.exec()`进入事件循环,等待用户操作。
基于Qt的嵌入式Linux开发的GUI设计研究与实现
基于Qt的嵌入式Linux开发的GUI设计研究与实现【摘要】随着嵌入式系统的发展,在Linux下使用Qt开发嵌入式应用程序是嵌入式图形用户界面(GUI)系统应用研究的重点。
本文结合智能温度控制系统人机界面开发的需求,介绍了Qt 及其第三方插件图形库Qwt 的特点,并详细描述了嵌入式GUI开发环境的搭建及嵌入式Linux程序开发的关键技术,包括信号与槽机制的使用、程序主要功能代码的实现。
最后介绍了智能温度控制系统GUI中串口通信及图形绘制等关键部分的设计与实现。
【关键词】Qt;Linux;Qwt;嵌入式系统;图形用户界面0 引言随着计算机技术和信息网络技术的飞速发展, 嵌入式系统的应用越来越广泛,越来越受到人们的青睐。
嵌入式技术被应用于各个领域,如消费电子、工业控制等领域。
大多数的工业检测系统都涉及到现场数据的实时采集,要求有更加友好、便于操作的人机交互界面,利用Qt及其第三方插件图形库Qwt 能设计出加快图形显示的操作方便的嵌入式智能终端控制系统。
本文以智能温度控制系统的开发为背景,介绍了Qt 及其第三方插件图形库Qwt,最后介绍了智能温度控制系统GUI中串口通信等关键部分的设计与实现。
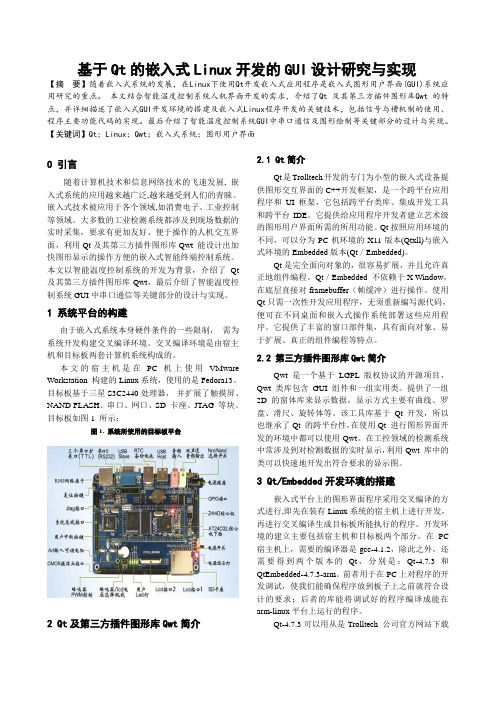
1 系统平台的构建由于嵌入式系统本身硬件条件的一些限制,需为系统开发构建交叉编译环境。
交叉编译环境是由宿主机和目标板两套计算机系统构成的。
本文的宿主机是在PC机上使用VMware Workstation 构建的Linux系统,使用的是Fedora13。
目标板基于三星S3C2440处理器,并扩展了触摸屏、NAND FLASH、串口、网口、SD 卡座、JTAG 等块。
目标板如图1 所示:图1. 系统所使用的目标板平台2 Qt及第三方插件图形库Qwt简介2.1 Qt简介Qt是Trolltech开发的专门为小型的嵌入式设备提供图形交互界面的C++开发框架,是一个跨平台应用程序和UI框架,它包括跨平台类库、集成开发工具和跨平台IDE。
linuxdeployqt使用
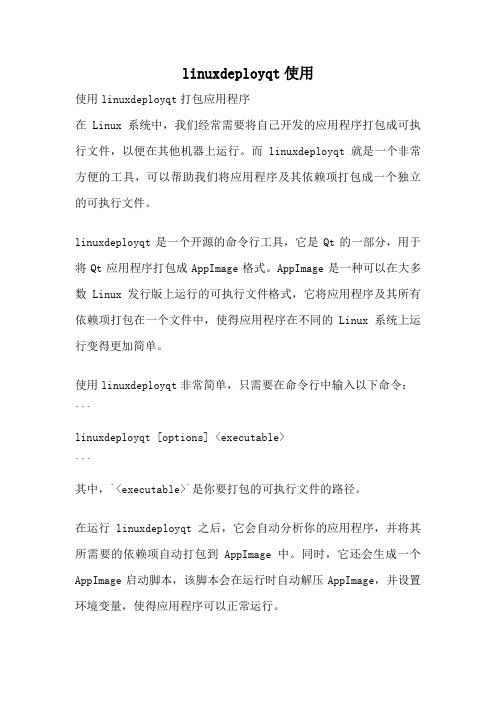
linuxdeployqt使用使用linuxdeployqt打包应用程序在Linux系统中,我们经常需要将自己开发的应用程序打包成可执行文件,以便在其他机器上运行。
而linuxdeployqt就是一个非常方便的工具,可以帮助我们将应用程序及其依赖项打包成一个独立的可执行文件。
linuxdeployqt是一个开源的命令行工具,它是Qt的一部分,用于将Qt应用程序打包成AppImage格式。
AppImage是一种可以在大多数Linux发行版上运行的可执行文件格式,它将应用程序及其所有依赖项打包在一个文件中,使得应用程序在不同的Linux系统上运行变得更加简单。
使用linuxdeployqt非常简单,只需要在命令行中输入以下命令:```linuxdeployqt [options] <executable>```其中,`<executable>`是你要打包的可执行文件的路径。
在运行linuxdeployqt之后,它会自动分析你的应用程序,并将其所需要的依赖项自动打包到AppImage中。
同时,它还会生成一个AppImage启动脚本,该脚本会在运行时自动解压AppImage,并设置环境变量,使得应用程序可以正常运行。
除了自动打包依赖项外,linuxdeployqt还提供了一些其他的选项,可以帮助你更好地定制打包过程。
例如,你可以使用`-qmldir`选项指定QML文件所在的目录,以便linuxdeployqt正确地处理这些文件。
你还可以使用`-bundle-non-qt-libs`选项将非Qt的依赖项打包到AppImage中,以便应用程序在其他机器上运行时能够找到这些依赖项。
linuxdeployqt还支持使用插件来扩展其功能。
你可以编写自己的插件,并将其放置在指定的目录中,linuxdeployqt会在打包过程中自动加载这些插件。
这使得你可以根据自己的需求定制打包过程,例如添加自定义的文件拷贝操作或环境变量设置。
linuxdeployqt在kylin编译
Linux下使用Qt进行开发时,可以使用Qt的构建工具QtDeployQt来简化编译过程。
QtDeployQt是一个自动化工具,它可以将Qt库和应用程序打包成一个可执行文件,并将其部署到Linux系统中。
要在Kylin操作系统上使用QtDeployQt编译应用程序,请按照以下步骤操作:
1. 确保您已经安装了Qt开发环境,包括Qt库和构建工具。
2. 打开终端并导航到您的应用程序源代码所在的目录。
3. 运行以下命令来安装QtDeployQt工具:
```shell
qmake -project
qmake
```
这将生成一个Makefile文件,用于构建您的应用程序。
4. 运行以下命令来编译您的应用程序:
```shell
make
```
这将使用Makefile文件构建您的应用程序。
5. 完成编译后,将生成的可执行文件复制到Kylin操作系统上,并尝试运行它。
请注意,Kylin操作系统是一个基于Linux的开源操作系统,因此您需要确保在Kylin上安装了所需的依赖项和库,以便正确运行您的应用程序。
此外,您还需要根据您的应用程序的需求进行适当的配置和调整。
希望这可以帮助您在Kylin操作系统上使用QtDeployQt编译应用程序!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
QT2440开发套件Linux用户手册(Ver 2.0 )使用前请先检查开发板的SDRAM,如果SDRAM型号是HY57V561620F TP-H 的,即型号的第12个字母为“F”的,请与我们销售联系更换SDRAM。
经过确认,这个型号SDRAM指标不合格,无法达到133MHz的操作频率。
其他型号SDRAM,如HY57V561620CTP-H的可以正常使用上海勤研电子有限公司目录目录 (2)1.内容综述 (5)2.硬件环境 (5)2.1串口的使用 (6)2.2JTAG的使用 (9)2.3网络通讯的使用 (9)3.软件环境 (10)3.1安装交叉编译器 (10)3.2准备好L INUX内核源码包 (10)3.2.1解压 (10)3.2.2配置 (10)3.2.3编译 (18)3.3准备好ROOT文件系统 (18)3.4准备好VIVI B OOTLOADER (18)4.VIVI BOOTLOADER固化到QT2440 (20)5.KERNEL(LINUX内核)固化到QT2440 (23)6.NFS方式MOUNT主机 (28)6.1在主机上启动NFS服务 (28)6.2在目标板上进行设定 (30)6.3启动L INUX (31)7.NFS方式更新文件系统 (32)7.1更新文件系统 (32)7.2从YAFFS文件系统启动 (33)8.主机上开发应用程序 (34)8.1编写H ELLOWORLD代码 (35)8.2编译HELLO (35)9.将应用程序下载到QT2440 (35)9.1采用NFS方式 (35)9.2采用U盘拷贝 (35)9.3采用SD或者MMC卡拷贝 (36)9.4采用FTP方式 (36)10.重建根文件系统 (36)附录A:内核驱动程序资源 (36)A.1串口驱动 (37)A.2MTD驱动 (37)A.3ADC驱动 (37)A.44按键驱动 (37)A.5RTC驱动 (37)A.6触摸屏驱动 (37)A.7USB HOST驱动 (37)A.8CS8900A网卡驱动 (37)A.9SD卡驱动 (38)A.10USB摄像头驱动 (38)A.11UDA1341声卡驱动 (38)A.12LCD驱动 (38)A.12LED驱动 (38)A.13YAFFS文件系统源码 (38)A.14其他资源 (38)附录B:BOOTLOADER 命令用户指南实例程序 (39)B.1 reset 命令 (39)B.2 cpu 命令 (39)B.3 mem 命令 (41)B.4 load 命令 (46)B.5 param 命令 (46)B.6 part 命令 (49)B.7 bon 命令 (52)B.8 boot 命令 (54)B.9 go 命令 (56)B.10 call 命令 (56)B.11 dump 命令 (57)附录C:网络服务 (58)C.1 IFCONFIG命令 (58)C.2 PING命令 (59)C.3 TRACEROUTE命令 (59)C.5远程登陆TELNET (59)C.5T ELNET服务器 INETD (60)C.6远程文件传送FTP (60)C.7W EB服务器BOA (60)附录D: 实例程序 (61)D.1控制台下的MP3播放器 (61)D.2W EB服务器程序 (61)附录E:LINUX常用命令 (62)1、文件列表– LS (62)2、目录切换– CD (62)3、复制– CP (62)4、删除– RM (62)5、移动– MV (62)6、比较– DIFF (62)7、回显– ECHO (62)8、容量查看– DU (62)9、文件内容查看– CAT (62)10、分页查看– MORE (62)11、时间日期– DATE (63)12、查找– FIND (63)13、搜索– GREP (63)14、设置环境变量– EXPORT (63)15、编辑– VI (63)16、压缩与解压– TAR (63)17、挂接– MOUNT (63)18、启动信息显示– DMESG (63)19、改变文件权限– CHMOD (63)20、创建节点– MKNOD (63)21、进程查看– PS (63)22、杀死进程– KILL (63)1.内容综述本文将对以下内容进行详细说明,您会从中了解如何建立基于QT2440的嵌入式Linux开发环境、及如何在这个环境下进行开发工作。
(1) 建立硬件环境;(2) 安装交叉编译工具,为目标板准备好kernel映像文件,root文件系统,vivi Bootloader;(3) 将vivi Bootloader固化到目标板;(4) 将kernel映像文件固化到目标板;(5) NFS方式mount主机上的root文件系统;(6) 通过NFS方式更新文件系统(支持YAFFS可读写的文件系统);(7) 在主机上为目标板开发应用程序;(8) 将应用程序下载到目标板并运行;(9) 安装和编译Qt开发环境;(10) 开发基于Qt的应用程序,并发布到QT2440;(11) 附录A:kernel中提供的底层驱动和资源;(12) 附录B:QT2440提供的实例程序资源;(13) 附录C:Linux下提供的网络服务及应用程序资源;本文档假设您已经在主机上安装了Red Hat Linux9.0(完全安装方式)。
如果你的主机上安装了Linux其他发行版,可能会发生一些问题。
因此如果您想避免麻烦并节省时间,最好在在您的PC上安装Red Hat Linux9.0(虚拟机Linux可能在mount nfs时会出现问题)。
如果您想了解更多关于Red Hat Linux 9.0的安装问题,请查阅其他资料,或浏览:/docs/manuals/linux/RHL-9-Manual/。
关于QT2440其它相关文档《QT2440用户手册》、《QT2440 WinCE用户手册 》。
2.硬件环境图1 连接图(采用hub接入网络)图2 连接图(采用交叉对等线连接主机)需要采用上图中的3根电缆线连接主机和开发板。
下面将分别介绍。
2.1串口的使用串口用来观察目标板在程序运行过程中的输出信息,同时也用来向目标板发送命令。
采用QT2440配套的串口线连接好PC机的COM口与开发板的COM1口。
在主机端,我们可以使用minicom来与QT2440的串口通讯。
配置Minicom,输入命令行:minicom –s出现:选择 “Serial port setup”项目。
按下 “A” 键设置 “Serial Device”,然后输入PC上接入的串行端口号(例如采用 COM1,则写入 /dev/ttyS0,如果是COM2,写入/dev/ttyS1。
)按下“E”键,设置波特率/奇偶位/位数,设置结构为115200 8N1。
按下“F”键,将“Hardware Flow Control”设置为NO。
最终结果如下(采用COM1口的例子):按回车键退出设置。
选择“Save setup as dfl”,并回车保存设置。
这时,复位开发板,如果你的开发板已经预装了linux,在minicom上将看到以下的信息。
2.2 JTAG的使用采用JTAG来固化bootloader。
JTAG连接由并口线与JTAG小板构成。
如果你想重新固化Bootloader,用QT2440配套的并口线连接PC机和JTAG小板,再用20针排线连接JTAG小板和QT2440开发板。
采用JTAG烧录bootloader的详细过程,参考第4节。
2.3网络通讯的使用网络通讯可以采用以太网交叉线来直接连接PC机和开发板,也可以用直通网线来连接Hub 和开发板。
网络通讯在NFS方式mount主机、root文件系统更新、以及进行各种网络应用调试时必须用到。
关于这些内容,请参考第6节、第7节和附录C。
在QT2440中,我们一般假设主机的IP地址为192.168.0.1,开发板的目标地址设定为192.168.0.18。
3.软件环境3.1安装交叉编译器(1)在编译linux之前,要先安装交叉编译toolchain,安装包位于光盘中的\Linux \ toolchain\cross-2.95.3.tar.bz2(编译vivi)和arm-linux-gcc-3.4.1.tar.bz2(编译kernel)。
在/usr/local 目录下建立名为arm的目录,进入该目录,执行解包:cd /usr/local/armtar xjvf /mnt/cdrom/linux/ toolchain/cross-2.95.3.tar.bz2tar xjvf /mnt/cdrom/linux/ toolchain/ arm-linux-gcc-3.4.1.tar.bz2(2)设置系统环境变量:编译vivi时:export PATH=$PATH:/usr/local/arm/2.95.3/bin编译kernel时:export PATH=$PATH:/usr/local/arm/3.4.1/bin这样,内核或其他应用程序均可用arm-linux- 来指定使用该交叉编译器。
3.2 准备好Linux内核源码包3.2.1解压在根目录下建立QT2440目录,进入该目录,执行解包:mkdir QT2440cd QT2440tar zxvf /mnt/cdrom/linux/kernel/kernel-xxxx.tgzxxxxxxxx的内容一般是版本信息此时在QT2440下产生一个kernel目录,就是linux的内核源码包。
3.2.2配置命令行如下:cd /QT2440/ kernel修改kernel根目录下的Makefile找到下面图示标注的一行,添加编译器3.4.1的路径/usr/local/arm/3.4.1/bin/arm-linux- CROSS_COMPILE ?=make menuconfig终端中显示:(1) 选中Load an Alternate Configuration File,敲空格进入:输入QT2440_cfg,点击OK:这样就完成了针对QT2440的基本配置。
如果您购买的是带有液晶屏和触摸屏的QT2440套餐,则还要配置一下您的LCD和触摸屏规格的类型。
如果您购买的是单板机,则跳过(2)和(3)。
(2)LCD相关选项在Console drivers 下,敲空格进入:进入Frame-buffer support选择S3C2440 Board LCD Display Size:根据你的LCD类型和解析率选择特定的项目:(3)触摸屏选项在Character devices 下,退出到Main Menu点击进入:选择S3C2440 TOUCHSCREEN Size:根据你的触摸屏规格(横放/竖放)选择特定的项目:X>Y代表触摸屏横放;Y>X代表触摸屏竖放。