基于单片机控制的XY绘图仪系统设计
单片机数控X-Y工作台系统设计—插补部分设计(精)
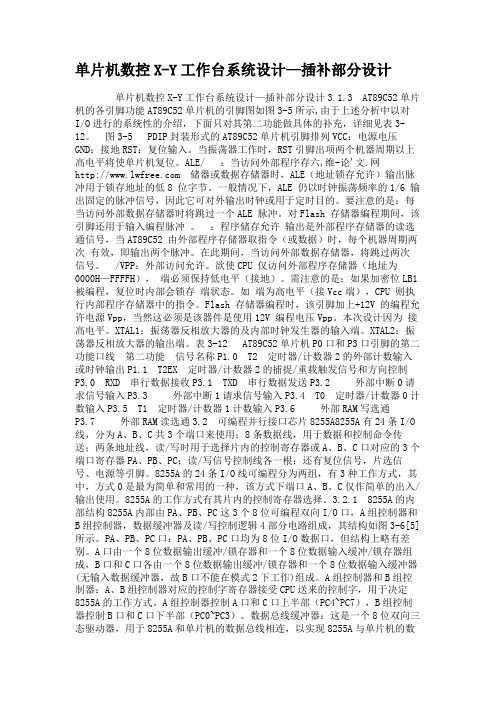
单片机数控X-Y工作台系统设计—插补部分设计单片机数控X-Y工作台系统设计—插补部分设计3.1.3 AT89C52单片机的各引脚功能AT89C52单片机的引脚图如图3-5所示,由于上述分析中以对I/O进行的系统性的介绍,下面只对其第二功能做具体的补充,详细见表3-12。
图3-5 PDIP封装形式的AT89C52单片机引脚排列VCC:电源电压GND:接地RST:复位输入。
当振荡器工作时,RST引脚出项两个机器周期以上高电平将使单片机复位。
ALE/ :当访问外部程序存六,维-论'文.网 储器或数据存储器时,ALE(地址锁存允许)输出脉冲用于锁存地址的低8 位字节。
一般情况下,ALE 仍以时钟振荡频率的1/6 输出固定的脉冲信号,因此它可对外输出时钟或用于定时目的。
要注意的是:每当访问外部数据存储器时将跳过一个ALE 脉冲。
对Flash 存储器编程期间,该引脚还用于输入编程脉冲。
:程序储存允许输出是外部程序存储器的读选通信号,当AT89C52 由外部程序存储器取指令(或数据)时,每个机器周期两次有效,即输出两个脉冲。
在此期间,当访问外部数据存储器,将跳过两次信号。
/VPP:外部访问允许。
欲使CPU 仅访问外部程序存储器(地址为0000H—FFFFH),端必须保持低电平(接地)。
需注意的是:如果加密位LB1 被编程,复位时内部会锁存端状态。
如端为高电平(接Vcc端),CPU 则执行内部程序存储器中的指令。
Flash 存储器编程时,该引脚加上+12V 的编程允许电源Vpp,当然这必须是该器件是使用12V 编程电压Vpp。
本次设计因为接高电平。
XTAL1:振荡器反相放大器的及内部时钟发生器的输入端。
XTAL2:振荡器反相放大器的输出端。
表3-12 AT89C52单片机P0口和P3口引脚的第二功能口线第二功能信号名称P1.0 T2 定时器/计数器2的外部计数输入或时钟输出P1.1 T2EX 定时器/计数器2的捕捉/重载触发信号和方向控制P3.0 RXD 串行数据接收P3.1 TXD 串行数据发送P3.2 外部中断0请求信号输入P3.3 外部中断1请求信号输入P3.4 T0 定时器/计数器0计数输入P3.5 T1 定时器/计数器1计数输入P3.6 外部RAM写选通P3.7 外部RAM读选通3.2 可编程并行接口芯片8255A8255A有24条I/O 线,分为A、B、C共3个端口来使用;8条数据线,用于数据和控制命令传送;两条地址线,读/写时用于选择片内的控制寄存器或A、B、C口对应的3个端口寄存器PA、PB、PC;读/写信号控制线各一根;还有复位信号,片选信号、电源等引脚。
XY工作台部件及单片机控制设计
XY工作台部件及单片机控制设计目录1.序言 (2)2.总体方案设计 (2)2.1.设计任务 (2)2.2.总体方案确定 (2)3.机械系统设计 (3)3.1.工作台外形尺寸及重量估算 (3)3.2.滚动导轨的参数确定 (4)3.3.滚珠丝杠的设计计算 (5)3.4.步进电机的选用 (7)3.5.确定齿轮传动比 (12)3.6.确定齿轮模数及有关尺寸 (12)3.7.步进电机惯性负载的计算 (12)4.控制系统硬件设计 (13)4.1.CPU板 (13)4.2.驱动系统 (15)4.3.控制系统软件的组成和结构 (17)5.参考文献 (21)1.序言据资料介绍,我国拥有400多万台机床,绝大部分都是多年累积生产的普通机床。
这些机床自动化程度不高,加工精度低,要想在短时期内用自动化程度高的设备大量更新,替代现有的机床,无论从资金还是从我国机床制造厂的生产能力都是不可行的。
但尽快将我国现有的部分普通机床实现自动化和精密化改造又势在必行。
为此,如何改造就成了我国现有设备技术改造迫切要求解决的重要课题。
在过去的几十年里,金属切削机床的基本动作原理变化不大,但社会生产力特别是微电子技术、计算机技术的应用发展很快。
反映到机床控制系统上,它既能提高机床的自动化程度,又能提高加工的精度,现已有一些企业在这方面做了有益的尝试。
实践证明,改造后的机床既满足了技术进步和较高生产率的要求,又由于产品精度提高,型面加工范围增多也使改造后的设备适应能力加大了许多。
这更加突出了在旧机床上进行数控技术改造的必要性和迫切性。
由于新型机床价格昂贵,一次性投资巨大,如果把旧机床设备全部以新型机床替换,国家要花费大量的资金,而替换下的机床又会闲置起来造成浪费,若采用改造技术加以现代化,则可以节省50%以上的资金。
从我国的具体情况来讲,一套经济型数控装置的价格仅为全功能数控装置的1/3到1/5,一般用户都承担得起。
这为资金紧张的中小型企业的技术发展开创了新路,也对实力雄厚的大型企业产生了极大的经济吸引力,起到了事半功倍的积极作用。
基于单片机的数控车床XY工作台与控制系统设计报告
基于单片机的数控车床XY工作台与控制系统设计报告设计报告:基于单片机的数控车床XY工作台与控制系统设计1.引言数控(数值控制)车床是一种以机电一体化技术为基础,通过计算机控制工件加工的设备。
传统的车床需要操作工人手动控制加工过程,而数控车床则通过计算机编程实现自动化加工。
本设计报告旨在设计基于单片机的数控车床XY工作台与控制系统,实现工件在XY平面上的精准加工。
2.系统设计(1)硬件设计本系统的硬件设计包括数控车床的机械结构和控制系统的电路设计。
数控车床的机械结构需要设计XY工作台的运动结构。
可以采用步进电机或直流伺服电机作为驱动器,通过丝杆传动实现运动。
同时,需要设计定位传感器用于测量工件位置,反馈给控制系统。
控制系统的电路设计主要包括单片机的选择和配套电路。
可以选择性能稳定、功能强大的单片机作为控制器,并设计外部电路实现与驱动器和传感器的连接。
此外,还需要设计电源电路、通信接口等。
(2)软件设计软件设计是数控车床控制系统非常重要的一部分,需要实现驱动器控制和运动轨迹规划等功能。
可以使用C语言开发嵌入式软件程序。
驱动器控制:通过控制输出脉冲和方向信号,控制步进电机或直流伺服电机的运动。
可以根据用户输入的指令,控制工件在XY平面上移动。
运动轨迹规划:根据用户输入的参数,计算出工件在XY平面上移动的运动轨迹。
可以采用插补算法,实现平滑移动和加工轨迹自由控制。
3.系统实现(1)实现步骤首先,进行硬件设计。
根据车床的尺寸和加工需求设计XY工作台的运动结构,选择合适的驱动器和传感器。
然后,根据单片机选型,设计电路连接驱动器和传感器。
最后,设计电源电路和通信接口。
其次,进行软件设计。
根据硬件设计的结果,编写嵌入式软件程序,实现驱动器控制和运动轨迹规划等功能。
最后,进行系统调试。
根据设计的功能要求,对系统进行全面测试和调试,验证系统的稳定性和性能。
(2)实验结果通过实验验证,本设计的数控车床XY工作台与控制系统实现了工件在XY平面上的精确加工。
基于单片机的XY绘图仪控制系统设计—

集美教师进修:鈡燕辉; 海沧教师进修:邱宗如。
主 持 人: 孙明云 陈智猛
注 意: (1)出于学校安全的管理,请带好身份证备查;
(2)海沧中学(新阳校区)的乘车方法:
杏林往海沧方向---没有直达车,需换乘,请上网查询;
岛内往海沧方向-----在岳阳小区换乘854或859,终点站(卷烟厂)下车,学校在卷烟厂的正北方约200米处。
数学科(高中骨干教师省级培训)通知
根据《福建省教育厅关于统一组织普通高中高级职称教师继续教育工作的通知》(闽教人[2009]73号)和《福建省教育厅关于下达2012年福建省第一批中小学教师和校长省级培训计划的通知》(闽教人[2011]113号)精神,为提高高中教师队伍素质和能力,适应我省普通高中新课程改革进一步深化的需要,福建教育学院将在2012年继续组织福建省高中新课程推进性实施骨干教师省级培训班。
3.解决新课程教学、实验等疑难问题。
培训对象:全省普通高中高级职称教师、各年段各学科备课组长。
培训经费
根据《福建省教育厅关于统一举办普通高中高级职称教师继续教育工作的通知》(闽教人[2009]73号)精神,高中高级职称教师培训所需的培训费和资料费由省师资队伍建设专项经费承担,住宿费、交通费等由所在单位负责。
“高效课堂”栏目:
与课程改革接轨、实现课堂教学效益的最大化。现今很多学校都在探寻课堂教学模式的变革,如“讲学稿”、“导学案”、“先学后教”、“少教多学”、“271模式”等,其根本就是实现高效课堂。本栏目的稿件可以是基于高效课堂教学的方式、实例、体会等。
“高考中考”栏目:
主要是典型、成功的高考、中考的备考经验以及体会。
物 理 科 通 知
毕业设计29绘图系统
论文摘要以单片机为基础,从最简单的数控到最先进的计算机数控,对数控作一系统地演示,完成简易数控绘图功能。
本系统单机运行实现基本的数控思想;系统与思想。
让学生对数控技术和数控知识有一系统的认识,彻底理解、掌握数控思想。
系统单机运行及与PC机联机运行。
按照从PC机上接收到的信息完成任务。
该系统配备了两套与PC机的通信接口,即并口和串口通信。
以实验条件和方便为宜选择其一。
在单机运行的情况下以十进制BCD拔盘作为输入设备,既符合人们的认知习惯又简捷直观。
并配有七段数码管显示器,以便在执行的过程中显示运行状况。
以软件实现插补,送出进给脉冲驱动步进电机运行,并经机械转换装置转换为X, Y两轴构成的平面绘图系统。
并探讨了一种均匀脉冲插补方法。
关键字:数控单片机步进电机通信插补显示AbstractDisplaying the NC by the numbers based on SCM from the simplest NC tothe advantest CNC to realize the NC plotting function. The radical NC thought realized by this system itself running: CNC thought realized by its running liked with PC. Let students have a systemic congnition to NC technician knowledge completely understand and mast the NC thought.The system runs singly also acts as the information getting from PC while linked with PC. This system was equipped two sets of communication interface with PC, the serial and parallel interface, select one of them according to the experiment condition and convenience. The system runs by itself, its inputting device is decimal BCD (Binary-Coded Decimal notation) code turn plate because the device not only according with people' s cognitive habit but concise and intuitionist. The system equipped with display—seven fragments LED( Low Emitting Diode),displaying the working state while system running. The feeding pulse,send out from the software interpolation to drive step electric motor,and transformed through the machine transform device to make up of two coordinates (X and Y) plane .plotting system. In addition,probing into a kind of the even pulse interpolation method.Key Words: number control(NC),single chip microprocessor(SCM),stepelectric motor,communication, interpolation,display目录1 综述 (5)1. 1计算机数控系统的基本概念 (5)1. 1. 1概述 (5)1.2数控系统的组成 (9)1.2.1计算机数控系统的组成 (9)1.3计算机数控系统的硬件 (11)1.3.1 NC装置的硬件构成 (11)1.3.2增强并行口EPP (Enhanced Parallel Port) (12)2.步进电机 (14)2.1经济型数控机床特点 (14)2. 2经济型数控系统的种类 (15)2. 3步进电机的工作原理及特性 (16)2. 4步进电机的分类 (16)2. 5步进电机的主要技术指标与特性 (17)2.6步进电机的控制方法 (18)2.7 步进电机的控制系统 (19)2.8经济型数控技术中微机运用及其接口技术 (21)2.8.1. ATMEL.89C51单片计算机 (21)2.8.2微机数控中的接口技术 (22)3 绘图仪系统设计 (25)3. l 绘图仪数控系统控制流程图 (25)3. 3数据输入 (27)3. 3. 1输入工具 (27)3. 3. 2 BCD码拔盘接口 (28)3. 4输入方法设计 (29)3. 4. 1工作系统分析 (29)3. 4. 2特征字设计 (30)3. 4. 3输入法示例说明 (31)3. 4. 4程序中数据处理 (32)3. 5系统演示 (33)3. 5. 1数据输入 (33)3. 5. 2直线插补 (34)3. 6显示部分设计 (39)3. 6. 1发光二极管 (39)3. 6. 2七段数码管LED (40)3. 6. 3 LED静态显示方式 (41)3. 6. 4 LED动态显示方式 (41)3.6.5 LED显示器与8155接口 (42)4.串行通信设计 (43)4. 1异步通信和同步通信 (43)4.1.1异步通信 (43)4.1.2同步通信 (44)4.2波特率(Baud rate) (44)4. 3通信过程及通信协议 (45)4. 3.1串—并转换与设备同步 (45)4. 3. 2串行通信协议 (45)4. 4 RS-232标准接口总线及串行通信硬件设计 (45)4.4.1 RS-232标准接口总线 (46)4.4.2. RS-232的信号特征 (46)4. 4. 3电气特征与电平转换 (46)4. 4. 4波特率设置 (47)5 脉冲均匀化插补方法 (48)5. 1 传统插补方法及其各轴脉冲波形 (48)5. 2 脉冲均匀化的插补方法 (50)结论 (52)致谢 (53)参考文献 (54)1 综述1. 1计算机数控系统的基本概念1. 1. 1概述(1)计算机数控的基本概念数字控制((Numerical Control)是近代发展起来的一种自动控制技术,是用数字化信息去控制运动及生产过程的一种方法,简称数控(NC)。
基于单片机的智能绘图仪
基于单片机的智能绘图仪作者:李学林祝翔黄丹来源:《山东工业技术》2018年第13期摘要:智能控制的发展,在不停的改变着我们的生活,代替人们在工作中完成繁琐或者能力不足的事件。
在这个越来越依赖电脑打印的生活中,能够有一份手工写的文档将会得到更多人的青睐。
因此设计一个仿手工写字的绘图工具,具有一定的必要性。
这里我们采用手机APP来完成文字和图片数据的采集和分析,通过蓝牙将最终坐标数据传给单片机,再用单片机来控制CoreXY结构,从而实现写字与绘图的功能。
关键词:绘图仪;人工智能;机器人DOI:10.16640/ki.37-1222/t.2018.13.1020 引言智能机器人作为一种包含相当多学科知识的技术,几乎是伴随着人工智能所产生的。
而智能机器人在当今社会变得越来越重要,越来越多的领域和岗位都需要智能机器人参与、这使得智能机器人的研究也越来越频繁。
虽然我们现在仍很难在生活中见到智能机器人的影子。
但在不久的将来,随着智能机器人技术的不断发展和成熟。
随着众多科研人员的不懈努力,智能机器人必将走进千家万户。
更好的服务人们的生活,让人们的生活更加舒适和健康。
1 设计思路智能绘图仪是用手机APP来采集、分析和发送要绘制图形的坐标,以MCU为核心,通过蓝牙与手机APP相连接,来控制Core XY结构来完成相应的描点功能。
如图1所示:2 设计方案2.1 机械机构部分机械结构部份设计经过反复讨论研究,结合多方因素,我们采用了Core XY结构,机械结构可参考图2所示,其中十字Core XY钢架结构简单且易操作,且该结构一个最大的优点是通过控制两个步进电机正反转动就可以实现绘图仪在X方向和Y方向的运动,从而实现绘图或写字的功能,使智能绘图仪的成本大大降低。
2.2 机械控制部分在我们的方案中,单片机部分主要是完成数据的接收和电机控制,因此不需要大量的数据计算和存储,因此我们采用了STC12系列单片机为主控芯片,以蓝牙传输模块为数据交互通道,实现系统的控制。
xy平面绘图仪 课程设计
XY平面绘图仪【摘要】:本课程设计是设计XY平面绘图仪,由上位机和下位机两部分组成,单片机通过接收PC机软件的绘图信息,控制步进电机完成图形的绘制。
单片机采用逐点比较法插补算法完成直线和圆弧的绘制,通过直线和圆弧的组合完成图形的绘制,最终实现了移点、画线、画弧、画圆、画矩形和组合图形的绘制。
【关键词】:XY平面绘图 CNC 逐点比较法直线圆弧插补下位机上位机Abstract:The course design is design the XY plane plotter, the System consists of host computer and the next crew composition. By receiving graphics information from PC by software, the SingleChip control stepper motor to complete the graph drawing. Point by point comparison with the completion of a straight line and arc interpolation algorithm for drawing, through a combination of lines and arcs to complete graphics rendering, and ultimately the shift points, draw lines, draw arc, draw a circle, draw a rectangle and the combination of graphics rendering .Keywords:XY-dimensional drawings CNC Point by point comparison method目录一、引言 (2)二、设计任务 (2)2.1 设计题目 (2)2.2 设计要求 (2)三、设计原理 (2)3.1 系统工作原理 (2)3.2 直线插补原理 (3)3.3 圆弧插补原理 (4)四、硬件设计 (7)4.1 单片机最小系统板 (7)4.2 串口通信电路设计 (7)五、软件设计 (8)5.1 下位机程序设计 (8)5.2 上位机软件设计 (9)六、系统调试及运行结果 (9)七、心得体会 (10)八、参考文献 (10)九、附录 (10)一、引言近年来,数控技术发展迅速。
基于单片机控制的XY绘图仪系统设计

摘要本设计是基于单片机控制的XY绘图仪系统设计与虚拟仿真。
在系统控制电路设计上,CPU采用的是AT89C51单片机。
采用90BF001型4相8拍的反应式步进电机作为驱动XY绘图仪的伺服电机,用ULN2003A 来驱动,并确定了XY绘图仪的传动方式。
单片机的复位方式为上电自动复位,时钟电路为内部时钟方式。
在CPU及外围电路芯片的选择上,以尽量节省I/O 口、性价比较高、技术成熟以及市场上通用芯片为基准,因而控制系统电路的结构简单,性能更优越。
程序编写完成后,在Keil软件进行编译和调试,并在Proteus环境中实现程序及电路的仿真。
关键字:XY平面绘图仪单片机微控制器Proteus 仿真ABSTRACTThis is a design of microcomputer-based CNC XY platform motion control system and its virtual simulation.In the control circuit design, used an AT89C51 microcontroller for CPU. Using the four phase eight reactive stepping motor 90BF001 as servo motor drives the XY platform, and they were driven by ULN2003A, and we also determined the transmission ways the XY platform. Chip power-on reset mode is automatically reset, clock circuit for the internal clock mode. On the choose of CPU and the peripheral circuit chip, following next principles : save the I/O mouth as possible , high performance with low cost, mature technology and general chip on the market. So the structure of the control system circuit is simple, and its performance is superior.After the completion of the program written, programs were compiled and debugged in Keil, and to achieve the simulation of program and circuit in Proteus environment.Key words:XY platform Chip-Single Microcomputer Microcontroller Proteus simulation目录第一章绪论 01.1课题设计研究背景 01.2研究的内容 01.3毕业设计的目的、意义 (1)第二章平面绘图仪控制系统的总体方案 (3)2.1平面绘图仪控制系统的控制方式 (3)2.2伺服系统及电机的选择 (3)2.3微机控制系统的选择 (4)2.4X-Y平面绘图仪的传动方式 (5)第三章 MCS-51单片机工作原理 (6)3.1单片机内部组成及引脚功能 (6)3.1.1 单片机的内部结构 (6)3.1.2 AT89C51单片机的主要特性: (6)3.1.3 AT89C51单片机的引脚功能 (7)3.2单片机的时钟电路 (9)3.3单片机的工作方式 (11)第四章单片机系统的设计 (13)4.1硬件配置与接口分配 (13)4.1.1存贮器空间分配 (13)4.1.2 I/O口地址分配 (13)4.2硬件电路的设计 (13)4.2.1 主控制器CPU的选择 (14)4.2.1 步进电机驱动电路的设计 (15)4.3其他辅助电路设计 (16)4.3.1 AT89C51的时钟电路单片机的时钟的产生方式 (16)4.3.2 AT89C51复位电路 (16)4.3.3 超程报警电路 (16)4.3.4 掉电保护电路 (17)4.3.5 光电隔离电路 (18)第五章基于PROTEUS的XY平面绘图仪运动仿真设计 (20)5.1P ROTEUS简介及仿真界面 (20)5.2K EIL简介 (21)5.3K EIL中的程序调试 (22)5.4P ROTEUS仿真系统硬件原理图 (23)5.5运行调试 (23)设计总结 (26)致谢 (27)参考文献 (28)附录 (29)附录A步进电机驱动平面绘图仪控制XY轴仿真原理图 (29)附录B C语言程序设计 (30)第一章绪论1.1 课题设计研究背景国内技术现状:进入21世纪以来,随着计算机技术的飞速发展,推动绘图仪控制技术更快的更新换代。
简易XY数控绘图仪模型制作与控制的毕业设计
四川理工学院毕业设计简易XY数控绘图仪模型制作与控制学生:学号:专业:机械设计制造及其自动化班级:指导教师:四川理工学院机械工程学院二0一一年六月第一章绪论四川理工学院毕业设计(论文)任务书设计(论文)题目:简易XY数控绘图仪模型制作与控制学院:机械工程学院专业:机械设计制造及其自动化班级:学号:学生:指导教师:接受任务时间 2011-3-2教研室主任(签名)院长(签名)1.毕业设计(论文)的主要内容及基本要求主要参数及设计目标:利用实验室现有的模型散件搭建XY方向数控绘图仪,行程以及速度控制根据模型本身确定。
要求:结构合理,制作三维装配过程动画,并由模型提供的软件编写出圆弧的进给控制算法,编写算法设计说明书。
2.指定查阅的主要参考文献及说明陆全龙. 数控机床. 华中科技大学出版社,2008张永相. 机电控制理论及应用. 重庆大学出版社,2002熊军. 数控机床原理与结构. 人民邮电出版社,20073摘要数控技术是现代制造技术的基础。
它的广泛应用,使普通机械被数控机械所代替,全球制造业发生了根本性变化。
数控技术将传统的机械制造与微电子、计算机、信息处理、现代控制理论、检测技术等多种学科技术融为一体,它是适应科技进步,满足市场需求的生产方式。
逐点比较法的每个插补循环由偏差判别、进给、偏差函数计算和终点判别四个步骤组成,其算法简单、运算直观,插补误差小,脉冲输出均匀,调节方便。
本设计利用慧鱼模型散件搭建数控绘图仪,实现绘图仪的XY方向的二维运动,并根据圆弧的插补原理编写了Robopro程序。
关键词:数控技术;逐点比较法;慧鱼模型;Robopro软件第一章绪论ABSTRACTNumerical control technology is the basis of modern manufacture technology. Its wide application makes ordinary machinery replaced by CNC machinery, and great change taken place in global manufacturing. CNC technology combines traditional machinery manufacturing with various technologies together, including microelectronics and computer, information processing, modern control theory, detection technology etc. It is adapted to the scientific and technological progress, and meets the demand of market mode of production.The each interpolation cycle is made up of discriminating deviation, feed, deviation function calculation and end discrimination four steps. Which have simple algorithm, intuitive operation, small interpolation error, uniform pulse output, and easy adjustment. This design uses Fischer model parts for setting up CNC plotter. It realizes the two-dimensional sports of plotter, and writes the Robopro program based on the principle of circular interpolation.Keywords: Numerical Control Technique;Point-by-point comparison;Fischer model;Robopro software目录摘要 (I)ABSTRACT ............................................................................................................................. I I 第一章绪论 (2)1.1数控原理 (2)1.2数控机床特点 (2)1.3数控系统的组成 (3)1.4数控的发展趋势 (3)1.4.1 性能发展方面 (4)1.4.2 功能发展方面 (5)第二章插补原理 (7)2.1插补的基本概念 (7)2.1.1 数控加工的“分解与合成”原理 (7)2.1.2 刀具运动路径分解 (7)2.1.3 数控轨迹插补 (7)2.1.4 轨迹插补方法 (8)2.2逐点比较法逆圆插补 (8)2.2.1 偏差函数构造 (8)2.2.2 偏差函数的递推计算 (9)2.2.3 终点判别 (10)2.2.4 逐点比较法圆弧插补 (10)2.2.5 插补过程 (10)2.2.6 象限处理 (11)第三章ROBOPRO控制软件 (13)3.1R OBOPRO介绍 (13)3.2基本模块介绍 (13)3.2.1 程序开始、结束 (13)3.2.2 数字分支 (14)第一章绪论3.2.3 判断(带数据输入) (14)3.2.4 数字量输入 (15)3.2.5全局变量 (15)3.2.6 指令 (15)第四章绘图仪的模型制作 (17)4.1慧鱼模型的来历 (17)4.2慧鱼模型的组成部分 (17)4.3设计思路 (17)图4-1工作台实物模型 (17)4.4数控工作台 (18)4.5编程的准备 (20)第五章ROBO程序 (22)5.1程序流程图 (22)5.2绘图仪ROBO控制程序 (22)5.2.1 程序开始 (22)5.2.2 程序分支 (23)5.2.3 第一象限程序 (23)5.2.4 第二象限程序 (26)5.2.5第三象限程序 (28)5.2.6 第四象限程序 (30)5.3绘图过程 (32)5.3.1 绘制前的准备过程 (32)5.3.2 调整画笔的位置 (34)5.3.3 绘制图形 (34)第六章结论 (35)参考文献 (36)致谢 (37)附录A:逐点比较法圆弧插补ROBOPRO程序总图 (38)附录B:经插补后绘制的圆弧 (39)第一章绪论第一章绪论1.1数控原理数控技术是综合了计算机技术、微电子技术、自动化技术、电力电子技术及现代机械制造技术等的柔性制造自动化技术。
基于单片机的数控车床XY工作台与控制系统设计说明书
基于单片机的数控车床XY工作台与控制系统设计摘要了解数控机床的概念,所谓数字控制是按照含有机床(刀具)运动信息程序所指定的顺序自动执行操作的过程。
而计算机数控机床就是数控机床在计算机监控下进行工作.它的优点很多,可以在同一机床上一次装夹可完成多个操作,生产率显著提高等优点,但它的价格昂贵.由于我国现在使用的机床大多数为普通车床,自动化程度低,要更新现有机床需要很多资金。
为了解决这个问题,也为了适应多品种中、小批量零件加工我们选择机床经济型数控改造。
纵向进给机构的改造:拆去原机床的溜板箱、光杠与丝杠以及安装座,配上滚珠丝杠及相应的安装装置,纵向驱动的步进电机及减速箱安装在车床的床尾,不占据丝杠空间。
横向进给机构的改造:拆除横向丝杠换上滚珠丝杠,由步进电机带动。
关键词:运动信息,滚珠丝杠,步进电机Single Chip Microcomputer—based XY table CNC latheand Control System DesignABSTRACTNumerical Control (NC)is any machining process in which the operations are executed automatically in sequences as specified by the program that contains the information for the tool movement .When Numerical Control is performed under computer supervision, it is called Computer Numerical Control (CNC)。
CNC machines have many advantages over conventional machines。
For example, there is a possibility lf performing operations on the same machine in one setup and production is significantly increased. One of its disadvantages is that they are quite expensive。
XY绘图仪设计

绘图仪是一种输出图形的硬拷贝设备。绘图仪在绘图软件的支持下课绘制出复杂、精确的图形,是各种计算机辅助设计不可缺少的工具。绘图仪的性能指标主要有绘图笔数、图纸尺寸、分辨率、接口形式及绘图语言等。
绘图仪一般是由驱动电机、插补器、控制电路、绘图台、笔架、机械传动等部分组成。绘图仪除了必要的硬设备之外,还必须配备丰富的绘图软件。只有软件与硬件结合起来,才能实现自动绘图。软件包括基本软件和应用软件两种。绘图仪的种类很多,按结构和工作原理可以分为滚筒式和平台式两大类。
绘图仪的传动方式:
为保证一定的传动精度和平稳性以及结构的紧凑,采用滚珠丝杠螺母传动副。,选用滚动直线导轨副,从而减小工作台的摩擦系数,提高运动平稳性。
考虑电机步距角和丝杠导程只能按标准选取,为达到分辨率的要求,以及考虑步进电机负载匹配,采用联轴器来联动。总体方案如下图1
图2.1绘图仪总体图
绘图仪在基于上面的xy平台设计,效果图如下:
在实际应用中应用中常用到的绘图仪举例如下:
两自由度绘图仪:
本毕设设计的是两自由度绘图仪,通过计算机控制两个步进电机,带动两根滚珠丝杠实现一个X_Y平面的绘图机构。绘制直线曲线的过程由计算机程序控制电机来实现。步进电机由计算机并行接口对其发出脉冲,通过改变程序可实现任意平面图形的插补。
激光绘图仪:
它是静电打印技术,激光打印技术,计算机技术和先进的精密机械技术的综合应用。其特点是分辨率高(600dpi),速度快(4—8米/分),网络性能强,应用灵活方便,扩展性能强。与喷墨绘图仪相比,激光绘图仪有如下优势:
M
4
0.6
4
导轨的额定动载荷 N
依据使用速度v(m/min)和初选导轨的基本动额定载荷 (kN)验算导轨的工作寿命Ln:
X-Y绘图仪设计说明书

武汉纺织大学机电工程院班级: 学号: 姓名: 指导老师:机电一体化课程设计说明书摘要模块化的小幅面平板式单坐标画笔驱动系统,通常由导轨座、移动滑块、工作平台、滚珠丝杠副,以及伺服电动机等部件组成。
其外观形式如图1-1所示。
其中,伺服电动机作为执行元件用来驱动滚珠丝杠,通过直齿圆柱齿轮的减速传动,滚珠丝杠的螺母带动滑块和工作平台仔导轨上运动,完成工作台在X方向的直线移动,调动画笔的高度从而实现直线的生成。
导轨副、滚珠丝杠螺母副和伺服电动机等均已标准化,由专门厂家生产,设计时只需根据工作载荷选取即可。
控制系统根据需要,可以选用标准的工业控制计算机,也可以设计专门的微机控1 机电一体化方向专业课程设计任务书2 总体方案设计2.1 设计任务设计一个数控X-Y小幅面平板式绘图仪,该用于图纸幅面A5以下的图形绘制,重复定位精度为±0.5mm。
设计参数如下:台面尺寸C×B×H=210mm×148mm×10mm;底座外形尺寸C1×B1×H1=430mm×160mm×20mm;最大长度L=500mm;工作台加工范围X=210mm,Y=148mm;工作台最大快移速度为1m/min。
2.2 总体方案确定2.2.1 系统的运动方式与伺服系统由于绘图移动的过程中,应用点位控制系统。
定位方式采用增量坐标控制。
为了简化结构,降低成本,采用步进电机开环伺服系统驱动X-Y工作台。
并选用MCS-51系列的ATR89C52作开环控制,与CPU、程序存储器、数据存储器、键盘与显示电路、I/O接口电路、D/A转换电路、串行接口电路等.选择合适的驱动电源,与步进电动机配套使用组成完整的控制系统,X、Y两工作位元件拟采用相同的型号与规格。
2.2.2 X-Y工作台的传动方式为保证一定的传动精度和平稳性,又要求结构紧凑,所以选用丝杠螺母传动副。
为提高传动刚度和消除间隙,采用预加负荷的结构。
优秀机械毕业设计二维步进单片机控制工作台机械系统设计(含全套cad图纸)

单片机控制的 X-Y 工作台系统可以设计为开环,半闭环和闭环伺服系统三种。本设计 采用开环伺服系统,通过单片机控制步进电动机的驱动,经传动机构动带动工作台的运动。 系统没有检测装置。机械结构设计首先根据工作台的最大载荷,选取导轨副,设计工作台, 然后进行结构设计,受力分析,转矩计算,画出工作台的装配草图,再选择步进电动机的 型号,进而设计选择滚珠丝杠,最后设计出 X-Y 工作台,画出其装配图。 关键词 工作台;步进电机;脉冲当量;步距角
2 方案原理的设计.......................................................................................................................... 6 2.1 总体方案的选择和说明........................................................................................................ 6 2.2 总体方案实现的系统组成框图............................................................................................ 7
III
徐州工程 学院毕业设计 (论文 )
目录
1 绪论.............................................................................................................................................. 1 1.1 课题研究的背景.................................................................................................................... 1 1.2 工作台的分类........................................................................................................................ 1 1.3 本设计工作台的作用和特点................................................................................................ 3 1.4 步进电机的发展现状............................................................................................................ 3 1.5 单片机的发展现状................................................................................................................ 5
基于单片机的X-Y绘图仪控制系统设计

基于单片机的X-Y绘图仪控制系统设计
宋凤娟;王春生;刘树明
【期刊名称】《微计算机信息》
【年(卷),期】2007(023)017
【摘要】X-Y绘图仪是指能分别沿着X向和Y向移动的坐标尺,X-Y绘图仪接收计算机的命令,在图纸上绘出各种字符和图形.平面绘图仪的绘图系统、数控机床的加工系统等,尽管结构和功能各不相同,但基本原理相同.X-Y绘图仪系统是将机械系统与微电子控制系统相结合而形成的一个有机整体.本文通过对X-Y绘图仪的机械系统、控制系统及接口电路的硬件设计及软件设计等,阐述了用8051单片机控制步进电机的驱动,经传动机构带动X向和Y向的坐标尺进行平面绘图.该系统具有操作方便,速度快、精度高等特点.
【总页数】2页(P108-109)
【作者】宋凤娟;王春生;刘树明
【作者单位】063020,河北唐山,唐山学院;063020,河北唐山,唐山学院;063020,河北唐山,唐山学院
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于单片机的X-Y轴步进电机控制系统开发 [J], 钱发飞;张培欧
2.基于单片机控制系统的数控X-Y工作台设计 [J], 李传军
3.基于X-Y控制平台的步进电机单片机闭环控制系统 [J], 李颖;张伏生;张志勇
4.基于WinAC和Profibus的大惯量X-Y航车控制系统设计与实现 [J], 潘琼文;崔岩
5.基于单片机控制的简易绘图仪 [J], 崔勇;张振华
因版权原因,仅展示原文概要,查看原文内容请购买。
基于上位机与MCS-51单片机的X-Y轴定位驱动系统
2
系统概述
本系统主要由上位机 MCS 51 单片机 驱动 电路和两台步进电机组成 其系统结构图 1 所示
图 1 系统结构框图
其中 上位机是 PC 机 由 VC 实现用户 交互界面 并将用户输入的控制命令通过串行口 输出到下位的 MCS 51 单片机 单片机按照上位
∗
机的命令 产生相应的控制信号 通过驱动电路 来驱动两台步进电机按照预先设定好的路径运 行 步进电机选用的是常州微特电机总厂生产的 75BC380 型步进电机 它的额定电压为 30V 额定 电流为 3A 步距角为 0.75o/1.5o 相数为 3 相 最大静转矩为 0.98N.m 具有较高的性能 但是 由于其驱动电压电流都比较大 对驱动电路的设 计增加了困难 例如需要增加隔离等等 对于某些定位要求精确的场合 为了防止步 进电机失步 还需要通过光电编码器反馈电机转 过的角度 并能测其转速 这里由于成本的原因 我们并没有添加光电编码器 但是我们可以通过 斩波恒流驱动 加减速定位控制等方法 减小失 步的可能性 本系统中使用了斩波恒流技术 可以保证步 进电机在不同转速下 各相的电流保持恒定 即 维持转矩不变 同时还采用了加减速定位控制的 方法 使步进电机的运行更加平稳可靠 本系统 中的重点和难点就是驱动电路的硬件设计和加减 速定位控制的软件设计
C3
1uF
C1 1uF
+
C2 1uF
+
图 2 串行通信硬件连接图
3.2 控制信号发生模块 三相步进电机的控制方式有三种 单三拍 双三拍和单双六拍方式 其中单三拍即按照 A B C A 的次序循环使步进电机的各相通电 双三拍即按照 AB BC CA AB 的次序通 电 单双六拍即按照 A AB B BC C CA A 的次序通电 在采用单双六拍方式运行时 步进电机的步距角将减小一半 因此为了提高定 位精度 采用单双六拍方式 其步进电机控制脉 冲分配如图 3 所示 当控制脉冲反向即按照 A CA C BC B BA A 次序通电时 步进电 机将反向运转
绘图仪的设计
湖南省高等教育(本科)课程设计专业:机电一体化工程课程名称:机床数控系统学生姓名:廖春成考籍号:010********* 指导老师:彭晓燕2009年4月20日X—Y绘图工作台数控系统的设计一.目的要求1.是工程类学生课程学习的重要环节之一,是统合以前所学知识(机电子、计算机等)而进行的基本训练,也是对所学知识的一次检验。
2.正确运用过去所学知识和基本理论,解决工程中的实际问题。
通过课程设计,巩固和深化以前所学知识,培养和提高分析、解决问题的能力。
3.学会运用手册、标准、锻炼获取资料、编写文件的能力。
二.课程设计内容和要求1、题目:X—Y绘图工作台控制系统的设计工件原理与过程:计算机控制X、Y向电机,驱动传动机构,带动工作台沿X、Y向运动,从而绘出图形。
本系统实际上就是一个典型的、简单的数控系统。
2、设计指标(1)绘图尺寸125×125mm(2)绘图速度V=1m/min(3)绘图转度±0.15mm(4)控制软件主要设计“手动”控制,工作台能在手动键的命令下沿X\Y轴正、反向运动。
(5)工件台超越边界时能亮灯报警,并停止运动。
(6)控制部分运行可靠,有一定抗干扰能力。
(7)成本低、重量轻。
3、课程设计图纸和说明书主要内容包括:(1)总体方案的确定(2)X-Y工作台机械结构设计(3)完成机械结构装配图(含压笔机构),A1图纸一张。
数控系统硬件设计‘设计数控系统硬件框图及部分电路设计,A2图纸一张。
部分电路包括工作方式选择电路,越界报警电路,压笔电路,光隔电路。
(4)数控系统软件设计具体内容包括步进电机环形分配程序(中断),搬运方向键监控和未能得逞限位监控。
三.总体方案的确定(围绕设计指标考虑)1、控制系统的方案确定(1)控制方式步进电机开环控制有着结构简单实现可控的优点,本设计才用步进电机的开环控制。
(2)控制系统采用的计算机微型计算机大多采用MCS—51型系统单片微型计算机,它是超大规模集成电路发展的产物,在控制领域中得到广泛的应用,发展非常迅速。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要
本设计是基于单片机控制的XY绘图仪系统设计与虚拟仿真。
在系统控制电路设计上,CPU采用的是AT89C51单片机。
采用90BF001型4相8拍的反应式步进电机作为驱动XY绘图仪的伺服电机,用ULN2003A 来驱动,并确定了XY绘图仪的传动方式。
单片机的复位方式为上电自动复位,时钟电路为内部时钟方式。
在CPU及外围电路芯片的选择上,以尽量节省I/O 口、性价比较高、技术成熟以及市场上通用芯片为基准,因而控制系统电路的结构简单,性能更优越。
程序编写完成后,在Keil软件进行编译和调试,并在Proteus环境中实现程序及电路的仿真。
关键字:XY平面绘图仪单片机微控制器Proteus 仿真
ABSTRACT
This is a design of microcomputer-based CNC XY platform motion control system and its virtual simulation.
In the control circuit design, used an AT89C51 microcontroller for CPU. Using the four phase eight reactive stepping motor 90BF001 as servo motor drives the XY platform, and they were driven by ULN2003A, and we also determined the transmission ways the XY platform. Chip power-on reset mode is automatically reset, clock circuit for the internal clock mode. On the choose of CPU and the peripheral circuit chip, following next principles : save the I/O mouth as possible , high performance with low cost, mature technology and general chip on the market. So the structure of the control system circuit is simple, and its performance is superior.
After the completion of the program written, programs were compiled and debugged in Keil, and to achieve the simulation of program and circuit in Proteus environment.
Key words:XY platform Chip-Single Microcomputer Microcontroller Proteus simulation
目录
第一章绪论 0
1.1课题设计研究背景 0
1.2研究的内容 0
1.3毕业设计的目的、意义 (1)
第二章平面绘图仪控制系统的总体方案 (3)
2.1平面绘图仪控制系统的控制方式 (3)
2.2伺服系统及电机的选择 (3)
2.3微机控制系统的选择 (4)
2.4X-Y平面绘图仪的传动方式 (5)
第三章 MCS-51单片机工作原理 (6)
3.1单片机内部组成及引脚功能 (6)
3.1.1 单片机的内部结构 (6)
3.1.2 AT89C51单片机的主要特性: (6)
3.1.3 AT89C51单片机的引脚功能 (7)
3.2单片机的时钟电路 (9)
3.3单片机的工作方式 (11)
第四章单片机系统的设计 (13)
4.1硬件配置与接口分配 (13)
4.1.1存贮器空间分配 (13)
4.1.2 I/O口地址分配 (13)
4.2硬件电路的设计 (13)
4.2.1 主控制器CPU的选择 (14)
4.2.1 步进电机驱动电路的设计 (15)
4.3其他辅助电路设计 (16)
4.3.1 AT89C51的时钟电路单片机的时钟的产生方式 (16)
4.3.2 AT89C51复位电路 (16)
4.3.3 超程报警电路 (16)
4.3.4 掉电保护电路 (17)
4.3.5 光电隔离电路 (18)
第五章基于PROTEUS的XY平面绘图仪运动仿真设计 (20)
5.1P ROTEUS简介及仿真界面 (20)
5.2K EIL简介 (21)
5.3K EIL中的程序调试 (22)
5.4P ROTEUS仿真系统硬件原理图 (23)
5.5运行调试 (23)
设计总结 (26)
致谢 (27)
参考文献 (28)
附录 (29)
附录A步进电机驱动平面绘图仪控制XY轴仿真原理图 (29)
附录B C语言程序设计 (30)
第一章绪论
1.1 课题设计研究背景
国内技术现状:进入21世纪以来,随着计算机技术的飞速发展,推动绘图仪控制技术更快的更新换代。
世界上许多绘图仪系统厂家利用PC机丰富的软硬件资源开发开放式体系结构的新一代控制系统。
开放式体系结构使绘图仪控制系统有更好的通用性、柔性、适应性、扩展性,并向智能化、网络化方向大大发展。
开放式体系结构可以大量采用通用微机的先进技术,如多媒体技术,实现声控自动编程等。
绘图仪控制系统继续向高集成度方向发展,每个芯片上可以集成更多个晶体管,使系统体积更小化,更加小型化、微型化。
可靠性大大提高。
利用多CPU的优势,实现故障自动排除;增强通信功能,提高进线、联网能力。
如今较为先进、金典之作为XY机械套件Makeblock平面绘图仪体系,它是一款可以实现平面坐标系精确定位的机器人套装,绘图定位精度可以达到0.1mm。
精细而坚固的机械结构,高性能的电子模块,为他的稳定性和精确度墓定了基础。
XY基础包将会发展成为高精度智能化的桌面绘图仪,可以通过它绘制出精彩的图片,设计等。
绘图仪通过PC端上位机Gremote控制,PC+运动控制板:把运动控制板插入PC机的标准插槽中作实时控制用,而PC机主要作非实时控制
国内发展趋势:
一、XY绘图仪的发展趋势
1、智能化
2、网络化
3、集成化
4、微机电控制系统
5、数字化
二、我国XY绘图仪产业发展的思考
1、注重系统配套
2、注重产品的可靠性
3、提倡创新,加强服务
国际技术现状:XY绘图仪从国际来看,德国、美国、日本等几个国家基本掌握了高档XY绘图仪平面绘图仪控制系统。
国外的主要XY绘图仪平面绘图仪控制制造商有西门子、发那克、三菱电机、海德汉、博世力士乐、日本大薇等。
1、纳米插补与数制技术已走向实用阶段
2、机器人广泛应用
3、智能化绘图不断扩展
4、CAD/CAM技术的应用
国际发展趋势:
1、新一代绘图仪向PC化和开放式体系结构方向发展
2、驱动装置向交流、数字化方向发展
3、增强通信功能,向网络化发展
4、绘图仪平面绘图仪控制系统在控制性能上向智能化发展
1.2 研究的内容
一、总体设计:首先按照老师对课设的要求及所设计单片机控制绘图仪的工作原理、应用场合、控制对象等确定合理的设计方案,仔细划分软件部分和硬件部分各自应完成的功能,从而确定设计思路。
二、硬件设计:由于现在市场上各种芯片种类繁多,而且不断在推陈出新,因此必须按照系统要求,根据“性价比最高”原则,选择既适合于本系统,又运行可靠的芯片和元器件,从而设计出最合理的硬件电路。
所需硬件:X/Y坐标尺、X/Y带传动链(X/Y传动丝杠)、步进电动机My/Mx、绘图笔、继电器、控制传动线路、计算机(单片机),微型计算机接口等。
(一)步进电动机的选择
(二)驱动器的接线方式
(三)X/Y传动方式的选择
(四)控制器的芯片的选择
(五)硬件电路的设计
(六)单片机的确定(AT89C51)
三、软件设计:利用汇编语言的编程,以及通过指令来确定步进电动机的运动规律、顺序。
采用逐点比较法来“一步一步的运算”进行直线插补、圆弧插补。
四、系统的调试及运行:在单片机开发装置上,用调试软件对程序进行调试,查错和修改,然后把调好的顺序联成一个完整的系统程序,再进行联机调试,在线仿真,最后组装样机,脱机运行,通过试运行对系统进行检测,以验证系统的功能。
设计要求完成整个控制系统的硬件设计和完成整个控制系统的人机接口软
件设计,通过Keil编译和调试程序,并最终在Proteus软件中仿真。
1.3 毕业设计的目的、意义
毕业设计是培养学生设计能力的重要实践性教学环节之一,是综合运用所学过的机械、电子、自动控制、计算机等知识进行的基本设计训练。
其目的是:能够正确运用大学期间所学课程的基本理论和相关知识,掌握机电一体化系统(产品)的功能构成、特点和设计思想、设计方法,了解设计方案的拟定、比较、分析和计算,培养学生分析问题和解决问题的能力,使学生具有机电一体化系统设计的初步能力;。