IO口模拟SPI通信C51程序
使用MCU的GPIO模拟SPI
使用MCU的GPIO模拟SPI在树莓派等单片机(MCU)上,可以使用GPIO模拟SPI(串行外设接口)来与其他设备进行通信。
SPI是一种同步串行数据传输协议,通常用于连接MCU和传感器、显示器、存储器等外设。
以下是使用MCU的GPIO模拟SPI的详细步骤。
1.了解SPI的基本原理:SPI使用四根信号线进行通信,包括时钟(SCLK)、主机输出从机输入(MOSI)、主机输入从机输出(MISO)和片选(SS)。
-SCLK:时钟信号,由主机产生,用于同步数据传输。
-MOSI:主机输出从机输入,主机将数据发送到从机。
-MISO:主机输入从机输出,从机将数据发送到主机。
-SS:片选信号,用于选择从机。
2.确定所需GPIO引脚:根据所连接的设备的要求,选择合适的GPIO引脚作为SCLK、MOSI、MISO和SS。
3. 配置GPIO引脚:在MCU上,使用相应的编程语言和库函数来配置GPIO引脚。
例如,在树莓派上使用Python编程,可以使用RPi.GPIO库进行配置。
4.编写SPI传输函数:编写一个函数来模拟SPI传输。
该函数应包括以下步骤:a.设置SS为低电平,选中从机设备。
b.发送数据比特串:逐位发送MOSI数据,同时接收并保存MISO数据。
c.设置SS为高电平,取消从机设备的选中。
假设我们要发送8位数据,可以使用以下Python代码实现SPI传输函数:```pythonimport RPi.GPIO as GPIOdef spi_transfer(data):GPIO.output(SS, GPIO.LOW) # 选中从机received_data = 0for bit in range(7, -1, -1): # 逐位传输数据#发送MOSI数据GPIO.output(MOSI, (data >> bit) & 0x01)#接收并保存MISO数据received_bit = GPIO.input(MISO)received_data = (received_data << 1) , received_bit#在SCLK上升沿发送和接收数据GPIO.output(SCLK, GPIO.HIGH)GPIO.output(SCLK, GPIO.LOW)GPIO.output(SS, GPIO.HIGH) # 取消从机选中return received_data```5. 通过调用SPI传输函数与从机通信:在应用程序中,根据需要调用SPI传输函数。
单片机模拟SPI程序
单片机模拟SPI程序单片机模拟SPI程序分类: C/C++IO口模拟SPI通信C51程序 /************************** 文件所用资源1.端口:P0.4,P0.5,P0.6,P0.72.调用delay_ms函数**************************//*************************模拟SPI接口I/O定义*************************/sbit spi_cs=P0^1;sbit spi_di=P0^2;sbit spi_clk=P0^3;sbit spi_do=P0^4;/*******************************向SPI器件写入一个字节数据*******************************/void spi_write(unsigned char spi_dat){unsigned char i;spi_cs=0;for (i=0;i<8;i++){spi_clk=0;if((spi_dat & 0x80)==0x80)spi_di=1;else spi_di=0;spi_clk=1;spi_dat=(spi_dat<<1);}spi_cs=1;}/******************************** 从SPI器件读出一个字节数据********************************/ unsigned char spi_read(){unsigned char i,spi_dat;spi_cs=0;for (i=0;i<8;i++){spi_clk=0;spi_dat=(spi_dat<<1);spi_clk=1;if(spi_do==1)spi_dat|=0x01; else spi_dat&=~0x01;}spi_cs=1;return spi_dat;}其实光模拟来说,就时序问题,读取和写入一个字节的时序。
单片机IO口介绍

单片机IO口介绍单片机(microcontroller)是一种集成电路芯片,具有运算、存储和控制功能。
它是嵌入式系统中最常用的处理器之一、在单片机中,IO (Input/Output)口是用来进行输入输出操作的接口。
IO口通常包括数字IO口和模拟IO口两种类型。
下面将详细介绍单片机IO口的功能和应用。
1.数字IO口:数字IO口是单片机与外部设备进行数字信号交换的接口。
数字IO口可以进行输入和输出操作,具有以下特点:-输入功能:可以通过读取外部设备的状态或信号,并将其转换为数字信号输入到单片机中进行处理。
例如,传感器的信号输入和按键的输入等。
-输出功能:可以通过将数字信号输出到外部设备,控制其工作状态。
例如,LED的控制、驱动电机或继电器等。
数字IO口通常以引脚(pin)的形式存在于单片机芯片上。
一个引脚包括输入端和输出端,可以根据需要进行配置。
数字IO口操作简单、速度快、精度高,常用于控制和通信等方面。
2.模拟IO口:模拟IO口是单片机与外部设备进行模拟信号交换的接口。
模拟IO口可以进行模拟输入和输出操作,常用于采集和控制模拟信号。
-模拟输入功能:可以从外部信号源中获取模拟信号,并将其转换为数字信号输入到单片机中进行处理。
例如,温度传感器、声音传感器等。
-模拟输出功能:可以将数字信号转换为模拟电压、电流等形式,输出到外部设备中。
例如,通过PWM(脉冲宽度调制)信号控制电机的转速。
模拟IO口通常通过ADC(模数转换器)和DAC(数模转换器)实现。
ADC将模拟信号转换为数字信号,DAC将数字信号转换为模拟信号。
模拟IO口的使用相对复杂,需要进行模数转换和数模转换,但在一些需要对模拟信号进行处理和控制的应用中起到关键作用。
3.应用场景:IO口在单片机系统中广泛应用于各种应用场景。
以下是一些常见的应用场景:-传感器接口:通过IO口连接传感器,读取传感器的输出信号,进行数据采集和处理。
例如温度、湿度、光照等传感器的接口。
AVR单片机IO口模拟SPI四种模式的程序
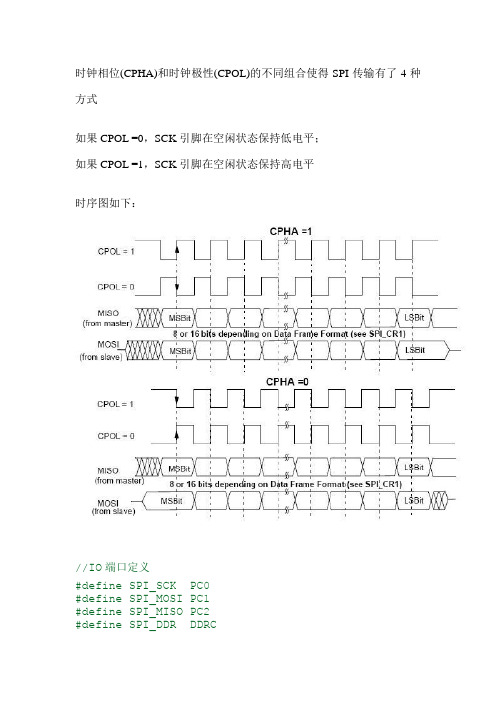
时钟相位(CPHA)和时钟极性(CPOL)的不同组合使得SPI传输有了4种方式如果CPOL =0,SCK 引脚在空闲状态保持低电平;如果CPOL =1,SCK 引脚在空闲状态保持高电平时序图如下://IO端口定义#define SPI_SCK PC0#define SPI_MOSI PC1#define SPI_MISO PC2#define SPI_DDR DDRC#define SPI_PORT PROTC#define SPI_PIN PINC//端口操作符定义#define SCK_SET SPI_PORT|=_BV(SPI_SCK)#define SCK_CLR SPI_PORT&=~_BV(SPI-SCK)#define MOSI_SET SPI_PORT|=_BV(SPI_MOSI)#define MOSI_CLR SPI_PORT&=~_BV(SPI_MOSI)#define MISO_PIN PINC&_BV(SPI_MISO)#define DELAY_BUS //如需要延时,用延时函数替代此符号//模式1:CPOL=1 CPHA=1void spi_init(void){SCK_SET;SPI_DDR|=_BV(SPI_MOSI)|_BV(SPI_SCK);}uint8_t spi_readwrite_byte(uint8_t data){uint8_t i,ret=0;for(i=0;i<8;i++){//下降沿模拟if(data&0x80)//设置输出MOSI_SET;elseMOSI_CLR;SCK_CRL;//SCK产生下降沿DELAY_BUS;//上升沿模拟ret<<=1;if(MISO_PIN)//读数据ret|=1;SCK_SET; //SCK产生上升沿data<<=1;DELAY_BUS;}return ret;}//模式2:CPOL=0 CPHA=1void spi_init(void){SCK_CLR;SPI_DDR|=_BV(SPI_MOSI)|_BV(SPI_SCK);}uint8_t spi_readwrite_byte(uint8_t data) {uint8_t i,ret=0;for(i=0;i<8;i++){//上升沿模拟if(data&0x80)//设置输出MOSI_SET;elseMOSI_CLR;SCK_SET;//SCK产生上升沿DELAY_BUS;//下降沿模拟ret<<=1;if(MISO_PIN)//读数据ret|=1;SCK_CLR; //SCK产生下降沿data<<=1;DELAY_BUS;}return ret;}//模式3:CPOL=1 CPHA=0void spi_init(void){SCK_SET;SPI_DDR|=_BV(SPI_MOSI)|_BV(SPI_SCK);}uint8_t spi_readwrite_byte(uint8_t data) {uint8_t i,ret=0;//设置好输出口if(data&0x80)MOSI_SET;elseMOSI_CLR;for(i=0;i<8;i++){DELAY_BUS;//下降沿模拟ret<<=1;if(MISO_PIN)//读数据ret|=1;SCK_CRL;//SCK产生下降沿DELAY_BUS;//上升沿模拟data<<=1;if(data&0x80)//设置输出MOSI_SET;elseMOSI_CLR;SCK_SET; //SCK产生上升沿}return ret;}//模式4:CPOL=0 CPHA=0void spi_init(void){SCK_CLR;SPI_DDR|=_BV(SPI_MOSI)|_BV(SPI_SCK);}uint8_t spi_readwrite_byte(uint8_t data) {uint8_t i,ret=0;//设置好输出口if(data&0x80)MOSI_SET;elseMOSI_CLR;for(i=0;i<8;i++){DELAY_BUS;//上升沿模拟ret<<=1;if(MISO_PIN)//读数据ret|=1;SCK_SET;//SCK产生上升沿DELAY_BUS;//下降沿模拟data<<=1;if(data&0x80)//设置输出 MOSI_SET;elseMOSI_CLR;SCK_CLR; //SCK产生下降沿 }return ret;}。
SPI总线在51系列单片机系统中的实现(一)

SPI总线在51系列单片机系统中的实现(一)摘要:MCS51系列、MCS96系列等单片机由于都不带SPI串行总线接口而限制了其在SPI总线接口器件的使用。
文中介绍了SPI串行总线的特征和时序,并以串行E2PROM为例,给出了在51系列单片机上利用I/O口线实现SPI串行总线接口的方法和软件设计程序。
关键词:单片机SPI串行总线总线接口1引言SPI(SerialPeripheralInterface--串行外设接口)总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。
外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。
SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOST和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT或INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。
由于SPI系统总线一共只需3~4位数据线和控制即可实现与具有SPI总线接口功能的各种I/O器件进行接口,而扩展并行总线则需要8根数据线、8~16位地址线、2~3位控制线,因此,采用SPI总线接口可以简化电路设计,节省很多常规电路中的接口器件和I/O口线,提高设计的可靠性。
由此可见,在MCS51系列等不具有SPI接口的单片机组成的智能仪器和工业测控系统中,当传输速度要求不是太高时,使用SPI总线可以增加应用系统接口器件的种类,提高应用系统的性能。
2SPI总线的组成利用SPI总线可在软件的控制下构成各种系统。
如1个主MCU和几个从MCU、几个从MCU相互连接构成多主机系统(分布式系统)、1个主MCU和1个或几个从I/O设备所构成的各种系统等。
在大多数应用场合,可使用1个MCU作为控机来控制数据,并向1个或几个从外围器件传送该数据。
c51单片机c语言常用指令 -回复
c51单片机c语言常用指令-回复C51单片机C语言常用指令导语:C51单片机是一种非常常用的微控制器,它广泛应用于许多嵌入式系统和电子设备中。
在单片机的开发过程中,C语言是一种非常常用的编程语言。
本文将介绍C51单片机常用的指令,帮助读者了解这些指令的功能和使用方法。
第一部分:常用的I/O口控制指令I/O口控制指令是C51单片机中非常重要的一部分,因为它们用于控制单片机与外部设备之间的数据交互。
以下是一些常用的I/O口控制指令:- P0:将P0口设置为输入或输出,可以用于与外部设备进行数据通信。
- P1:将P1口设置为输入或输出,可以用于与外部设备进行数据通信。
- P2:将P2口设置为输入或输出,可以用于与外部设备进行数据通信。
- P3:将P3口设置为输入或输出,可以用于与外部设备进行数据通信。
第二部分:常用的中断控制指令中断是C51单片机中实现实时响应的重要机制之一。
以下是一些常用的中断控制指令:- EA:使能所有中断。
- EX0:外部中断0的控制指令,用于外部设备产生中断信号。
- EX1:外部中断1的控制指令,用于外部设备产生中断信号。
- IT0:外部中断0的触发方式,可以设置为电平触发或边沿触发。
- IT1:外部中断1的触发方式,可以设置为电平触发或边沿触发。
第三部分:常用的定时器控制指令定时器是C51单片机中实现时间计数和定时任务的重要模块。
以下是一些常用的定时器控制指令:- TMOD:设置定时器模式,可以选择定时器0/1的工作模式。
- TL0、TL1:定时器0/1的低8位计数器,用于保存定时值的低8位。
- TH0、TH1:定时器0/1的高8位计数器,用于保存定时值的高8位。
- TR0、TR1:定时器0/1的运行控制位,用于启动和停止计时器。
- TF0、TF1:定时器0/1的溢出标志位,用于判断定时器是否溢出。
第四部分:常用的串口通信指令串口通信是C51单片机中常用的通信方式之一,用于与其他设备进行数据交互。
51单片机IO口模拟串口

论坛新老朋友们。
祝大家新年快乐。
在新的一年开始的时候,给大家一点小小的玩意。
工程师经常碰到需要多个串口通信的时候,而低端单片机大多只有一个串行口,甚至没有串口。
这时候无论是选择高端芯片,还是更改系统设计都是比较麻烦的事。
我把以前搞的用普通I/O口模拟串行口通讯的程序拿出来,供大家参考,希望各位兄弟轻点拍砖。
基本原理:我们模拟的是串行口方式1.就是最普通的方式。
一个起始位、8个数据位、一个停止位。
模拟串行口最关键的就是要计算出每个位的时间。
以波特率9600为例,每秒发9600个位,每个位就是1/9600秒,约104个微秒。
我们需要做一个精确的延时,延时时间+对IO口置位的时间=104微秒。
起始位是低状态,再延时一个位的时间。
停止位是高状态,也是一个位的时间。
数据位是8个位,发送时低位先发出去,接收时先接低位。
了解这些以后,做个IO 模拟串口的程序,就是很容易的事。
我们开始。
先上简单原理图:就一个MAX232芯片,没什么好说的,一看就明白。
使用单片机普通I/O口,232数据输入端使用51单片机P3.2口(外部中断1口,接到普通口上也可以,模拟中断方式的串行口会有用。
呵呵)。
数据输出为P0.4(随便哪个口都行)。
下面这个程序,您只需吧P0.4 和P3.2 当成串口直接使用即可,经过测试完全没有问题. 2、底层函数代码如下:sbit TXD1 = P0^4; //定义模拟输出脚sbit RXD1 = P3^2; //定义模拟输入脚bdata unsigned char SBUF1; //定义一个位操作变量sbit SBUF1_bit0 = SBUF1^0;sbit SBUF1_bit1 = SBUF1^1;sbit SBUF1_bit2 = SBUF1^2;sbit SBUF1_bit3 = SBUF1^3;sbit SBUF1_bit4 = SBUF1^4;sbit SBUF1_bit5 = SBUF1^5;sbit SBUF1_bit6 = SBUF1^6;sbit SBUF1_bit7 = SBUF1^7;void delay_bps() {unsigned char i; for (i = 0; i < 29; i++); _nop_();_nop_();} //波特率9600 模拟一个9600波特率unsigned char getchar2() //模拟接收一个字节数据{while (RXD1);_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();delay_bps();SBUF1_bit0 = RXD1; //0delay_bps();SBUF1_bit1 = RXD1; //1delay_bps();SBUF1_bit2 = RXD1; //2delay_bps();SBUF1_bit3 = RXD1; //3delay_bps();SBUF1_bit4 = RXD1; //4delay_bps();SBUF1_bit5 = RXD1; //5delay_bps();SBUF1_bit6 = RXD1; //6delay_bps();SBUF1_bit7 = RXD1; //7delay_bps();return(SBUF1) ; //返回读取的数据}void putchar2(unsigned char input) //模拟发送一个字节数据{SBUF1 = input;TXD1 = 0; //起始位delay_bps();TXD1 = SBUF1_bit0; //0delay_bps();TXD1 = SBUF1_bit1; //1delay_bps();TXD1 = SBUF1_bit2; //2delay_bps();TXD1 = SBUF1_bit3; //3delay_bps();TXD1 = SBUF1_bit4; //4delay_bps();TXD1 = SBUF1_bit5; //5delay_bps();TXD1 = SBUF1_bit6; //6delay_bps();TXD1 = SBUF1_bit7; //7delay_bps();TXD1 = 1; //停止位delay_bps();}3、实现串行通讯。
几种常用的模拟SPI读写一体化模块(C51)

几种常用的模拟SPI读写一体化模块(C51)几种常用的模拟SPI读写一体化模块(C51)原文:说明:SPI接口有一个特点,即在时钟SCK的上升沿打入数据MOSI,在下降沿读入数据MISO.片选信号CS有正负区别.在硬件上MOSI与MISO是可以短路变为SIO可读写IO的.故SPI可为(不包括CS)三线(SCK,MOSI,MISO)协议,两线(SCK,SIO)协议再者,SPI一般为双向同时高速收发数据的,方向由时钟SCK的跳变沿决定。
根据以上所述,模拟SPI读写模块编制成为一体化模块是必要的。
而且调用规则只需注意读数据时要写入0xff即可。
非常方便好用。
例如:res = SpiReadWrite(val);//模块写SpiReadWrite(0xff);//模块读对于具体器件,由于涉及到命令、地址及数据等,故一个完整的SPI读或写操作可能需要几个模拟SPI读写一体化模块来完成。
所以一般完整的SPI读或写操作需以下函数组合完成void SpiOpen(void); //打开片选 CS=0或CS=1void SpiClose(void); //关闭片选 CS=1或CS=0unsigned char SpiReadWrite(val); //模拟SPI读写一体化模块void SpiWriteEnable(void); //使能写操作void SpiWriteD ISA ble(void); //禁止写操作unsigned char SpiReadStatus(void); //读状态void SpiWriteStatus(unsigned char val); //写状态void SpiWriteWait(void); //等待写入完成void SpiWriteByte(unsigned int addr, unsigned char val);//写一个字节void SpiWriteWord(unsigned char addr, unsigned int val);//写一个字unsigned char SpiReadByte(unsigned int addr); //读一个字节unsigned int SpiReadWord(unsigned char addr); //读一个字/*----------------------------------------------------------------------------/*-----------------------------------------------例:X5045模拟SPI读写一体化模块PTR905模拟SPI读写一体化模块------------------------------------------------*unsigned char SpiReadWrite(unsigned char val){unsigned char i;ACC = val;for (i = 8; i > 0; i --){CY = MISO;//取数据SO_rlca_();//存数据ACC.0读数据ACC.7同时进行MOSI = CY;//送数据SISCK = 1;//上升沿打入数据_nop_();//延时SCK = 0;//下降沿读入数据}return ACC;}/*----------------------------------------------- 例:X5045模拟SPI读写一体化模块ISD4004模拟SPI读写一体化模块------------------------------------------------* unsigned char SpiReadWrite(unsigned char val) {unsigned char i;ACC = val;for (i = 8; i > 0; i --){SCK = 0;//下降沿读入数据_nop_();//延时CY = MISO;//取数据SO_rlca_();//存数据ACC.0读数据ACC.7同时进行MOSI = CY;//送数据SI_nop_();//延时SCK = 1;//上升沿打入数据MOSI = 1;//释放总线SI}return ACC;}/*----------------------------------------------- 例:AT93C46模拟SPI读写模块------------------------------------------------* sbit ACC_7 = ACC^7;unsigned char SpiReadWrite(unsigned char val) {unsigned char i;ACC = val;for (i = 8; i > 0; i --){CY = ACC_7;//读数据ACC.7MOSI = CY;//送数据SISCK = 1;//上升沿打入数据CY = MISO;//取数据SO_rlca_();//存数据ACC.0SCK = 0;//下降沿}return ACC;}。
IO口模拟SPI主从机例程

IO口模拟spi主从机通讯例程下面这两幅图是,关于SPI数据读取或发送的时序图。
1、主机io口模拟spi通讯例程//**spi io 口初始化**//void SPI_init(void){gpio_configure_fpin(SPI_MISO, IO_TYPE_INPUT);//配置成输入模式gpio_configure_fpin(SPI_MOSI, IO_OUTPUT_1);//配置成输出模式gpio_configure_fpin(SPI_SCK, IO_OUTPUT_1); //配置成输出模式gpio_configure_fpin(SPI_CS, IO_OUTPUT_1); //配置成输出模式clr_spi_GPIO(SPI_SCK);//拉低SPI_SCKset_spi_GPIO(SPI_CS);//拉高SPI_SCKclr_spi_GPIO(SPI_MOSI);//拉低SPI_MOSI}//**主机spi读取一字节api**//unsigned char SPI_ReadByte(void){unsigned char i,rByte=0;clr_spi_GPIO(SPI_CS);for(i=0;i<8;i++){clr_spi_GPIO(SPI_SCK);//clr_spi_sck;delay_us(3);rByte<<=1;if(MISO_is_status())////M16 MISO---PB6rByte|=1;set_spi_GPIO(SPI_SCK);//set_spi_sck;delay_us(3);}clr_spi_GPIO(SPI_SCK);set_spi_GPIO(SPI_CS);return rByte;}//** 读取miso 的电平**//char MISO_is_status(void){if(red_spi_GPIO(SPI_MISO))//return 1;elsereturn 0;}//**主机spi写入一字节api**//void SPI_WriteByte(unsigned char wByte){unsigned char i;clr_spi_GPIO(SPI_CS);for(i=0;i<8;i++){clr_spi_GPIO(SPI_SCK);//delay_us(3);//if(wByte&0x80){set_spi_GPIO(SPI_MOSI);//}else{clr_spi_GPIO(SPI_MOSI);//}wByte=wByte<<1;set_spi_GPIO(SPI_SCK);//set_spi_sck;delay_us(3);//}clr_spi_GPIO(SPI_SCK);set_spi_GPIO(SPI_CS);}////////////////////////////////////////////////////////////////////////////////////注意,我写的主从机的io口对接如下主机io 从机ioSPI_MISO ------------------------- SPI_MISOSPI_MOSI --------------------------- SPI_MOSISPI_SCK --------------------------- SPI_SCKSPI_CS -------------------------- SPI_CS可能有的人对上面的io口对接的方式感到奇怪,请仔细看我对这几个io口做的初始化设置就可以明白。
89C51单片机IO口模拟串行通信的实现方法
89C51单片机I/O口模拟串行通信的实现方法·严天峰·目前普遍采用的MCS51和PIC系列单片机通常只有一个(或没有)UART 异步串行通信接口,在应用系统中若需要多个串行接口(例如在多机通信系统中,主机既要和从机通信又要和终端通信)的情况下,通常的方法是扩展一片8251或 8250通用同步/异步接收发送芯片(USART),需额外占用单片机I/O资源。
本文介绍一种用单片机普通I/O口实现串行通信的方法,可在单片机的最小应用系统中实现与两个以上串行接口设备的多机通信。
1.串行接口的基本通信方式串行接口的有异步和同步两种基本通信方式。
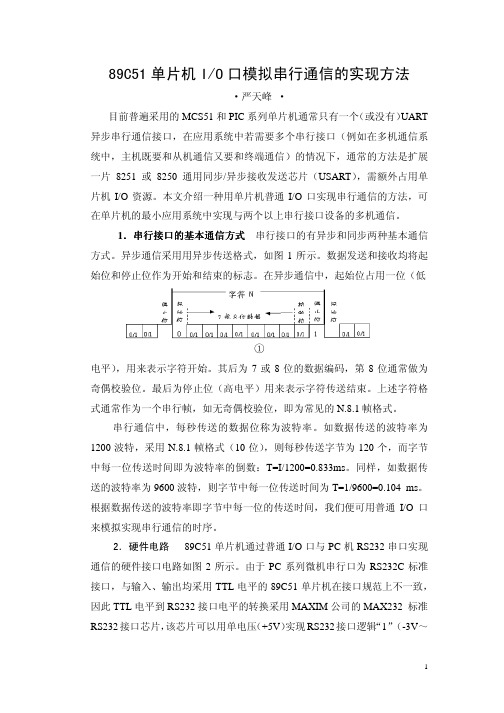
异步通信采用用异步传送格式,如图1所示。
数据发送和接收均将起始位和停止位作为开始和结束的标志。
在异步通信中,起始位占用一位(低①电平),用来表示字符开始。
其后为7或8位的数据编码,第8位通常做为奇偶校验位。
最后为停止位(高电平)用来表示字符传送结束。
上述字符格式通常作为一个串行帧,如无奇偶校验位,即为常见的N.8.1帧格式。
串行通信中,每秒传送的数据位称为波特率。
如数据传送的波特率为1200波特,采用N.8.1帧格式(10位),则每秒传送字节为120个,而字节中每一位传送时间即为波特率的倒数:T=I/1200=0.833ms。
同样,如数据传送的波特率为9600波特,则字节中每一位传送时间为T=1/9600=0.104 ms。
根据数据传送的波特率即字节中每一位的传送时间,我们便可用普通I/O口来模拟实现串行通信的时序。
2.硬件电路 89C51单片机通过普通I/O口与PC机RS232串口实现通信的硬件接口电路如图2所示。
由于PC系列微机串行口为RS232C标准接口,与输入、输出均采用TTL电平的89C51单片机在接口规范上不一致,因此TTL电平到RS232接口电平的转换采用MAXIM公司的MAX232 标准RS232接口芯片,该芯片可以用单电压(+5V)实现RS232接口逻辑“1”(-3V~15V)和逻辑“0”(+3V~15V)的电平转换。
Keil C51单片机实验指导

Keil C51实验项目Keil C51实验项目 (1)一、单片机的IO编程 (2)实验1 IO开关量输入实验 (3)实验2 IO输出驱动继电器(或光电隔离器)实验 (4)实验3 IO输入/输出---半导体温度传感器DS18B20实验 (5)二、单片机的中断系统 (6)实验 1 外部中断----脉冲计数实验 (6)三、单片机的定时器/计数器 (7)实验1 计数器实验 (7)实验2 秒时钟发生器实验 (9)四、单片机的串口特点和编程 (10)实验1 PC机串口通讯实验 (10)实验2 RS485通讯实验 (12)五、存储器 (13)实验1 RAM存储器读写实验 (13)六、PWM发生器 (14)实验1 PWM发生器(模拟)实验 (14)实验2 蜂鸣器实验 (15)七、WDG看门狗 (16)实验1 外扩WDG(MAX705)实验 (16)实验2 WDG(内部)实验 (17)八、SPI总线 (18)实验1 SPI(模拟)实验-----TLC2543 AD转换实验 (18)实验2 SPI(模拟)实验-----TLV5616 DA转换实验 (19)九、I2C总线 (20)实验1 I2C(模拟)实验-----IC卡(AT24C01)读写实验 (20)十、综合实验 (22)实验1 HD7279LED数码管显示实验 (22)实验2 HD7279键盘实验 (22)实验3 电机转速实验 (23)十一、步进电机实验 (25)实验1 步进电机正反转实验 (25)十二、TFT液晶显示实验 (25)实验1 TFT液晶显示彩色条纹实验 (25)十三、16X16LED点阵显示汉字实验 (26)实验1 16X16LED点阵显示汉字实验 (26)一、单片机的IO编程实验1 IO开关量输入实验目的:学习单片机读取IO引脚状态的的方法。
内容:编程读取IO引脚状态。
设备:EL-EMCU-I试验箱、EXP-89S51/52/53 CPU板。
单片机IO口模拟SPI四种模式的程序

单片机IO口模拟SPI四种模式的程序单片机IO口模拟SPI四种模式的程序#include "iom8535v.h"#define _CPOL 1#define _CPHA 0#define SCK_IO DDRA|=0X01#define MOSI_IO DDRA|=0X02#define MISO_IO DDRA&=0XFB#define SSEL_IO DDRA|=0X08#define SCK_D(X) (X?(PORTA|=0X01):(PORTA&=0XFE)) #define MOSI_D(X) (X?(PORTA|=0X02):(PORTA&=0XFD)) #define SSEL_D(X) (X?(PORTA|=0X08):(PORTA&=0XF7))#define MISO_I() (PINA&0X04)void delay(){unsigned char m,n;for(n=0;n<5;n++);for(m=0;m<100;m++);}/************************************************ 端口方向配置与输出初始化************************************************/ void SPI_Init(void){SCK_IO ;MOSI_IO ;MISO_IO ;SSEL_IO ;SSEL_D(1);MOSI_D(1);#if _CPOL==0SCK_D(0);#elseSCK_D(1);#endif}/**********************************************模式零写数据***********************************************/ #if _CPOL==0&&_CPHA==0 //MODE 0 0 void SPI_Send_Dat(unsigned char dat){unsigned char n;for(n=0;n<8;n++){SCK_D(0);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(1);}SCK_D(0);}/********************************************* 模式零读数据*********************************************/ unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;for(n=0;n<8;n++)SCK_D(0);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(1);}SCK_D(0);return dat;}#endif/********************************************** 模式二写数据***********************************************/ #if _CPOL==1&&_CPHA==0 //MODE 1 0 void SPI_Send_Dat(unsigned char dat){unsigned char n;for(n=0;n<8;n++){SCK_D(1);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(0);}SCK_D(1);}/********************************************* 模式二读数据*********************************************/ unsigned char SPI_Receiver_Dat(void)unsigned char n ,dat,bit_t;for(n=0;n<8;n++){SCK_D(1);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(0);}SCK_D(1);return dat;}#endif/********************************************* 模式一写数据*********************************************/ #if _CPOL==0&&_CPHA==1 //MODE 0 1 void SPI_Send_Dat(unsigned char dat){unsigned char n;SCK_D(0);for(n=0;n<8;n++){SCK_D(1);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(0);}}/********************************************* 模式一读数据*********************************************/ unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;for(n=0;n<8;n++){SCK_D(1);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(0);}SCK_D(0);return dat;}#endif//////////////////////////////////////////////////////////////////////////////////////////////////////////////#if _CPOL==1&&_CPHA==1 //MODE 1 1void SPI_Send_Dat(unsigned char dat){unsigned char n;SCK_D(1);for(n=0;n<8;n++){SCK_D(0);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(1);}}/************************************模式三读数据************************************/unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;SCK_D(0);for(n=0;n<8;n++){ SCK_D(0);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(1);}SCK_D(1);return dat;}#endif/**************************************************************************/ void main() {SPI_Init();DDRB = 0XFF;//#if _CPOL//SCK_D(0);//#endifwhile(1){//SSEL_D(0);//SPI_Send_Dat(0x01);//SPI_Send_Dat(0x31);//SSEL_D(1);SSEL_D(0);SPI_Send_Dat(0x81); PORTB =SPI_Receiver_Dat(); SSEL_D(1);//delay();}}。
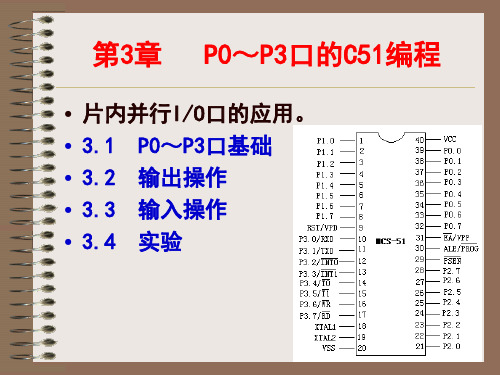
第3章51单片机P0P3口的C51编程
【例3-2】位操作。编程实现P1.3所接的 发光二极管亮、灭闪烁
• • • • • • • • • • #include<reg51.h> sbit LED3=P1^3; void delay(unsigned int d) { while(--d>0); } void main( ) { while(1) { LED3=0; delay(50000); LED3=1; delay(50000); } }
• void main( ) • { while(1) • { K0=1;K1=1;K2=1;K3=1; • LED0=K0; LED1=K1; • LED2=K2; LED3=K3; • } • }
• • • • •
思考: 为什么在读键状态之前要先置1? 修改: (1)开关闭合时灯灭。 (2)K0控制LED3,K1控制LED2,K2控 制LED1,K3控制LED0。
3.1 识
读锁存器 内部总线 写锁存器 D
51单片机的P0~P3口基础知
地址/数据 控制 2 锁存器 CP Q 1 Q MUX V1 & VCC V2
读锁存器
2
PO.X
VCC 内部上拉电阻 Q V1 P1.X
内部总线 写锁存器 D 锁存器 CP Q
1
1
读引脚
读引脚
读锁存器 2 内部总线 写锁存器 D CP 锁存器 1 读引脚 第二功能输入
4、8段LED动态显示技术
• 【例3-6】利用51单片机的并行口作为动 态显示的段口与位口的示例。
3.3
输入操作
• 作为51单片机片内并行I/O口输入信号 ,是属于数字信号的“高、低电平”或 脉冲信号的“上升沿、下降沿”两大类 ,这两类信号可以通过: • “闸刀型开关”、“按钮型开关”两类 开关来模拟。
51单片机SD卡SPI模式操作

脚
s卡 的命 令格式 固定 为6 字节4 个位 ,其格式如 d 个 8
图3 所示 。
l】 , ! 矗=为 I说 明 帆 持 s 的 命 々 j d 、 …
s d模式 韩 ≯
( m^ A m T3
S i投式 p 类 型
10 P /
;
描述
书柠 翊 暂 掘 线 3
一
盛卷
器
—
]
J f
一
i
k
三、 1 5 单片机与s 卡在s i d p模式下的连接
由于5 单片机 内部没有集成sj 块 ,使用5 单片 1 p 模 1
机 与s卡通讯 要用5 单片机 的1 d 1 0口模 拟si p时序 ,原 则 上 5 单片 机 的P 、 1P 、3 1 0 P 、2 P 口的任 意位都 可 以与s 卡 d S 卡的内部结 构如图2 示 ,主要有 四部分组成 , D 所
名字
C S
类 型
批 述
片选
凿
互面五 二 蓟
— —— —— —— — — —— —— —— 一 心氍 艘 ; s个 位 . M 6 — — — 04 p
j —— — — —— —— — —— —— — — —- 一 -
命 令/ 反漩
电源地
~ ) S } 源
的, 两种模式下具有相 同的命令 。
连, 其接 口端定义如表1 所示 。s卡有两种操作模式 , d 一 种是s模式 , d 另一种是si p 模式 , 同模式下端 口的定 义 不 不同。s 模式有一个时钟线 、 D 一个命令饭 馈线 、 四根输 入/ 出信号线 、 输 两个 电源地和一个 电源 , 所有九根线都
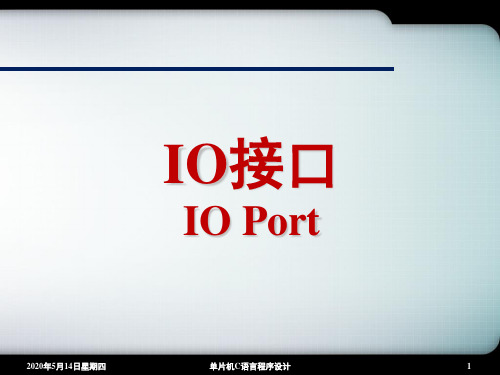
单片机C语言第3章51单片机P0P3口的C51编程1课件

1. 结构
P0
P1
P2
P3
D锁存器
★
★
★
★
MUX开关 ★
★
输出控制 ★
★
★
内部上拉电阻
★
★
★
2. 功能
P0
P1
P2
读引脚
VCC
2
P1.N锁存器
D
Q
CLK
Q
R V
P1.N
1
(1)输出方式:数据经内部总线送入锁存器存储,某位数 据为1,则Q=1,Q=0,VT1截止,引脚P1.N上出现高电 平;反之,数据为0,则Q=0,Q=1,VT1导通,引脚 P1.N上出现低电平。
(2)读引脚方式:读引脚时,控制器打开三态门1,引脚 P1.N上的数据经三态门1进入芯片的内部总线,再送到 累加器A,输入时无锁存功能。
1、P0口具有通用I/O口方式,可实现输出、读引脚(输入) 和读锁存器三种功能;
2、作为通用I/O口方式时,需要外接上拉电阻;
3、P0口具有地址/数据分时复用方式,可实现地址/数据输 出、数据输入两种功能;
4、地址/数据分时复用方式时无需外接上拉电阻;
5、分时复用方式的数据输入时无需程序写1操作。
P0~P3小结
V
P0.n的通用I/O口工作方式:输出、读引脚、读锁存器
读锁存器 2
VCC
外接上拉电阻
内部总线 写锁存器
P0.N锁存器
D
Q
V
CLK
Q
51单片机模拟spi串行接口程序
CLK=1;
if(DataO)val|=1; // read
}
CLK=0;
return val;
}
sbit CLK= P1^5;
sbit DataI=P1^7;
sbit DataO=P1^6;
#define SD_Disable() CS=1 //片选关
#define SD_Enable() CS=0 //片选开
unsigned char SPI_TransferByte(unsigned char val)
{
unsigned char BitCounter;
for(BitCounter=8; BiCounter!=0; BitCounter--)
{ CLK=0;
DataI=0; // write
if(val&0x80) DataI=1;
unsigned char SPI_TransferByte(unsigned char val)
{
unsigned char BitCounter;
for(BitCounter=8; BiCounter!=0; BitCounter--)
{ CLK=0;
DataI=0; // write
if(val&0x80) DataI=1;
val<<=1;
CLK=1;
if(DataO)val|=1; // read
}
CLK=0;
return val;
}
sbit CLK= P1^5;
sbit DataI=P1^7;
sbit DataO=P1^6;
#define SD_Disable() CS=1 //片选关
C51第3章 IO口
80C51/89C51
XTAL2 XTAL1 P3.2/INT0 P3.3/INT1 P3.4/T0 P3.5/T1 GND
4 5 6 7 8 9 10
89C2051
17 16 15 14 13 12 11
P1.5 P1.4 P1.3 P1.2 P1.1/AIN1 P1.0/AIN0 P3.7
2016年6月1日星期三
2016年6月1日星期三 单片机C语言程序设计 15
单片机的IO口
P3口的第二功能:
P3.0:RXD(串行口输入) P3.1:TXD(串行口输出) P3.2:INT0(外部中断0输入) P3.3:INT1(外部中断1输入) P3.4:T0(计数器0的外部输入) P3.5:T1(计数器1的外部输入) P3.6:WR(片外数据存储器写选通控制输出) P3.7:RD (片外数据存储器读选通控制输出)
2016年6月1日星期三
33
单片机最小系统 复位电路 :使单片机系统处于确定的初 始状态。
上电复位
+5V C1
上电复位加按键复位
+5V K R2 C1
RST
9
RST
9
R1
80C51
D
80C51
R1
2016年6月1日星期三
单片机C语言程序设计
34
单片机IO口控制外设 硬件优化:
1. 增强驱动能力:三极管、缓冲器 (74LS244、74LS245) 2. 输出信号锁定:锁存器(74LS373、 74LS573) 3. 减少IO口占用:串入并出移位寄存器 (74LS164、74LS595)
单片机IO口控制外设 驱动蜂鸣器:
1. 电压型蜂鸣器:接额定电压即可发声 2. 脉冲型蜂鸣器:接入变频方波,可得到 不同音调的声音
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
{
unsigned char i,spi_dat;
spi_cs=0;
for (i=0;i<8;i++)
{
spi_clk=0;
spi_dat=(spi_dat<<1);
else spi_di=0;
spi_clk=1;
spi_dat=(spi_dat<<1);
}
spi_cs=1;
}
/********************************
从SPI器件读出一个字节数据
********************************/
文件所用资源
1.端口:P0.4,P0.5,P0.6,P0.7
2.调用delay_ms函数
**************************/
/*************************
模拟SPI接口I/O定义
*********Biblioteka ***************/
sbit spi_cs=P0^1;
spi_clk=1;
if(spi_do==1)spi_dat|=0x01;
else spi_dat&=~0x01;
}
spi_cs=1;
return spi_dat;
}
其实光模拟来说,就时序问题,读取和写入一个字节的时序。
void spi_write(unsigned char spi_dat)
{
unsigned char i;
spi_cs=0;
for (i=0;i<8;i++)
{
spi_clk=0;
if((spi_dat & 0x80)==0x80)spi_di=1;
sbit spi_di=P0^2;
sbit spi_clk=P0^3;
sbit spi_do=P0^4;
/*******************************
向SPI器件写入一个字节数据
*******************************/
SCLK_1; //时钟高
CS_0; //片选低,开始工作。
for(i=0;i<8;i++)//循环产生时钟,写入数据。
{
SCLK_0; //时钟低,下降沿
if(0x80&abyte)
SO_1;
else
SO_0;
SCLK_1;
abyte<<=1;
}
SCLK_0;
CS_1;
//设要读的数据是abyte表示。
CS_0;
SCLK_1;
for(i=0;i<8;i++)//读取数据值。
{
SCLK_0;
;;
SCLK_1;
abyte<<=1;
if(in_SI)
abyte++;
}
SCLK_0;
CS_1;
首先选4个IO口,作模拟用,分别模拟CS、SCLK、SI、SO.即是片选、时钟、数据输入、数据输出。
IO口初始化,分别把对应的IO口设置输入输出。CS、SCLK、SO、设置为输出,SI设置为输入。
然后就是时序问题了,一般如下:
//设要写的数据是abyte表示。
CS_1; //片选高,