ABB机器人常见故障处理
ABB机器人故障处理

ABB故障处理一、故障类型分类1、机械故障1.1 轴承故障1.2 传动系统故障1.3 机械结构故障2、电气故障2.1 电源故障2.2 控制系统故障2.3 电缆连接故障3、编程故障3.1 代码错误3.2 逻辑错误3.3 参数设置错误4、传感器故障4.1 传感器故障4.2 信号处理故障二、故障处理步骤1、问题确认1.1 收集故障现象信息1.2 确定问题出现的频率和条件1.3 检查是否有相关故障报警2、故障排查2.1 机械部分排查2.1.1 检查机械结构是否有异常 2.1.2 检查传动系统是否正常2.1.3 检查轴承是否损坏2.2 电气部分排查2.2.1 检查电源供应是否正常2.2.2 检查控制系统是否工作正常 2.2.3 检查电缆连接是否良好2.3 编程部分排查2.3.1 检查编程代码是否正确2.3.2 检查参数设置是否正确2.4 传感器部分排查2.4.1 检查传感器是否损坏2.4.2 检查传感器信号处理部分是否正常3、故障解决3.1 机械故障解决方法3.2 电气故障解决方法3.3 编程故障解决方法3.4 传感器故障解决方法4、故障预防措施4.1 定期维护保养4.2 及时更换易损件4.3 提升操作人员技能附件:故障处理记录表法律名词及注释:1、机械故障:指在运行过程中出现的机械部分的故障,包括轴承故障、传动系统故障和机械结构故障等。
2、电气故障:指在运行过程中出现的电气部分的故障,包括电源故障、控制系统故障和电缆连接故障等。
3、编程故障:指在运行过程中出现的与编程相关的故障,包括代码错误、逻辑错误和参数设置错误等。
4、传感器故障:指在运行过程中出现的传感器部分的故障,包括传感器故障和信号处理故障等。
机器人设备常见故障排除的十个技巧

机器人设备常见故障排除的十个技巧机器人设备在现代工业生产中扮演着越来越重要的角色,但是在实际运行中难免会遇到各种各样的故障问题。
为了有效提高机器人设备的运行效率和延长使用寿命,掌握一些常见故障的排除技巧显得尤为重要。
在本文中,将分享机器人设备常见故障排除的十个技巧,帮助你快速解决故障问题,保障生产运行的正常进行。
1. 检查电源供应首先要确保机器人设备的电源供应是正常的,检查开关是否打开,插头是否松动,电缆是否断裂等。
有时候故障可能只是来自于电源供应的问题,及时排查可以避免不必要的麻烦。
2. 检查传感器传感器是机器人设备中的关键部件,负责感知周围环境并传达给控制系统。
当机器人出现异常运行时,需要检查传感器是否工作异常,清理传感器周围的灰尘或杂物,确保其正常运行。
3. 检查连接线路机器人设备通常有众多的线路连接,要经常检查连接线路是否松动或损坏,特别是在机器运行中频繁移动的地方。
及时修复线路问题可以有效减少故障发生的可能性。
4. 重启设备有时候机器人设备出现故障可能只是暂时性的问题,通过简单地重启设备可以解决一些无法在系统中找到原因的故障。
重启设备前记得保存好所有的数据,避免造成数据丢失。
5. 清洁设备机器人设备长时间运行后会积累大量的灰尘和杂物,影响设备的正常运行。
定期清洁设备表面和内部部件,特别是机器人关节和传感器等部位,可以有效预防故障的发生。
6. 更新软件机器人设备的软件系统也需要定期更新,以修复已知的BUG和优化系统性能。
确保软件是最新版本,可以提高设备的稳定性和可靠性,减少故障的发生。
7. 检查润滑部件机器人设备的关节和传动部件通常需要定期润滑以减少磨损和摩擦,确保设备的顺畅运行。
检查润滑部件的润滑油是否充足,是否已过期,及时更换和添加润滑油可以延长设备的使用寿命。
8. 校准设备有些机器人设备在长时间运行后可能需要进行重新校准以确保精准度和准确性。
定期校准设备可以避免设备运行的偏差和误差,提高设备的工作效率。
abb机器人常见故障处理
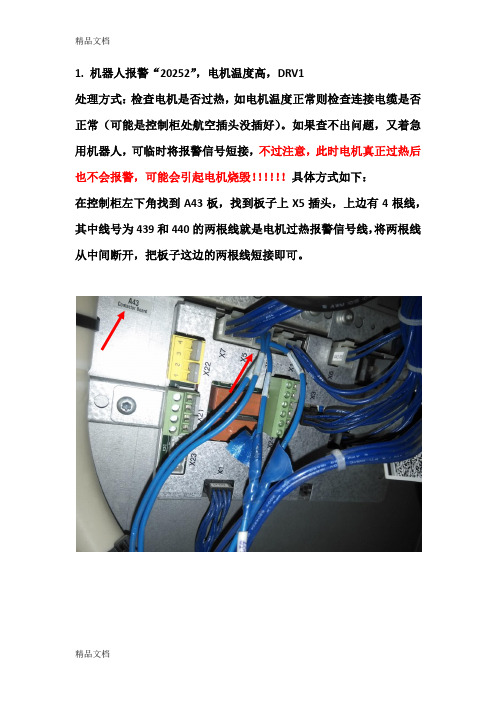
1、机器人报警“20252”,电机温度高,DRV1故障处理处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是控制柜处航空插头没插好λ如果査不出问题,又着急用机器人,可临时将报警信号短接,不过注意,此时电机真正过热后也不会报警,可能会引起电机烧毀。
具体操作方式:在控制柜左下角找到A43板,找到板子上5插头,上边有4根线,其中线号为439和440的两根线就是电机过热报警信号线将两根线从中间断开,把板子这边的两根线短接即可。
2、ABB机器人电源模块短路板短路故障处理人为因素:热插拔硬件非常危险,许多电路板故障都是热插拔引起的,带电插拨装板卡及插头时用力不当造成对接口、芯片等的损害,从而导致机器人电路板损坏;随着使用机器人时间的增长,机器人电路板上的元器件就会自然老化,从而导致机器人电路板故障。
环境因素:由于操作者的保养不当,机器人电路板上布满了灰尘,可以造成信号短路。
3、什么情况下需要为工业机器人进行备份1.新机器第一次上电后。
2.在做任何修改之前。
3.在完成修改之后。
4.如果工业机器人重要,定期1周一次。
5.最好在U盘也做备份。
6.太旧的备份定期删除,腾出硬盘空间。
4、机器人开机,示教器一直显示加载界面,如何处理上述情况是示教器和机器人主控制器之间没有建立通讯连接,未建立连接的原因包括:1.机器人主机故障。
2.机器人主机内置的cf卡(sd卡)故障。
3.示教器到主机之间的网线松动等。
处理方式:1.检查主机是否正常,检查主机内sd卡是否正常。
2.检查示教器到主机网线是否连接正常。
5、机器人出现报警提示信息10106维修时间提醒是什么意思?这种情况是ABB机器人智能周期保养维护提醒。
6、机器人在开机时进入了系统故障状态如何处理?1.重新启动一次机器人。
2.如果不行,在示教器查看是否有更详细的报警提示,并进行处理。
3.重启。
4.如果还不能解除则尝试B启动。
5.如果还不行,请尝试P启动。
ABB机器人常见故障处理大全

ABB机器⼈常见故障处理⼤全ABB⼯业机器⼈常见故障处理1. 开机⽰教器显⽰如下1)如果机器⼈开机,⽰教器⼀直显⽰connecting to the robot controller,如上图(robotware版本是⽩⾊界⾯,提⽰关键字⼀样),如何处理?2)上述情况是⽰教器和机器⼈主控制器之间没有建⽴通讯连接3)未建⽴连接的原因包括:a) 机器⼈主机故障b) 机器⼈主机内置的cf卡(sd卡)故障c) ⽰教器到主机之间的⽹线松动等4)如何处理?a) 检查主机是否正常,检查主机内sd卡是否正常?5.15版本的主机是cf卡,在下述位置5.61以上版本(包括robotware6版本)的主机是sd卡,在下述主机右侧b) 检查⽰教器到主机⽹线是否连接正常?⽰教器到主机上的⽹⼝均为主机绿⾊标签⽹⼝2. 50296 smb内存差异处理⽅法:以上为更换了SMB后,由于SMB内数据和控制柜内数据不⼀致导致1)点击ABB,校准,点击SMB内存2)选择⾼级3)选择清除SMB(由于更换了SMB,如果更换了控制器卡,则选择清除控制柜内存)4)点击“关闭”后选择“更新”5)选择替换SMB电路板6)最后重新更新转数计数器即可3. 20032转数计数器未更新处理⽅法:1)⼿动移动机器⼈⾄各轴刻度线(现场如果不能同时到零刻度线,可以⼀个轴⼀个轴来)2)点击ABB,校准,点击更新转数计数器3)根据实际点击更新(更新时,⽰教器不⽤Enable)4. 38103 与SMB的通信中断处理⽅法:检查机器⼈控制柜下⽅的x2到机器⼈本体的smb线是否接好5. 50057关节未同步处理⽅法:1)此故障多数由于未正确关机导致。
2)点击重启,选择⾼级,选择B启动,机器⼈将恢复到最近的⽆措状态6. 正确关机⽅式正确关机⽅式不是直接断电,⽽是进⼊ABB,重新启动,选择⾼级,选择关机7. 20252 电机温度⾼处理⽅法:1)本体6个电机温控线为串联,最后接⼊接触器板(柜内左侧的A43)的x5阵脚2)可能某个轴温度过⾼,导致热敏电阻断开,可以打开电机盖板检查3)如果电机不热或者温控线断开,也可暂时短接A43接触器版的x5的1和28. 34316 电机电流错误处理⽅法:上述问题为驱动到对应电机的动⼒线未正确连接,(上图表⽰4轴)可检查驱动对应轴到电机的连线A41为驱动,X11为1轴输出,X12为2轴输出,X13为3轴输出,X14为4轴输出,X15为5轴输出,X16为6轴输出,9. 37001 电机开启接触器错误处理⽅法:1)此项表⽰接触器动作故障。
abb机器人转角路径故障提示处理示与机器人故障信息阅读技巧详解
abb机器人转角路径故障提示处理示与机器人故障信息阅读技巧详解摘要:一、abb机器人转角路径故障概述二、故障提示与处理方法1.故障现象及原因2.故障诊断与判断3.故障处理与解决方案三、机器人故障信息阅读技巧1.故障信息的获取与整理2.故障信息的解读与分析3.故障信息的应用与优化正文:abb机器人转角路径故障是机器人运行过程中常见的问题,它可能导致机器人运行轨迹偏离预期,影响生产效率和产品质量。
为了保证机器人的稳定运行,了解故障提示及处理方法至关重要。
本文将详细介绍abb机器人转角路径故障的故障提示、处理方法以及机器人故障信息的阅读技巧。
一、abb机器人转角路径故障概述abb机器人转角路径故障主要表现为机器人行驶至转角处时,无法顺利完成转向或转向过程中出现抖动、碰撞等现象。
此故障可能由以下几个方面原因导致:1.机器人控制系统故障:控制器指令错误、传感器故障等。
2.机器人机械部件故障:转角关节磨损、传动部件损坏等。
3.机器人行走路径规划问题:路径规划不合理、路径干涉等。
4.外部环境因素:地面的摩擦力、障碍物等。
二、故障提示与处理方法1.故障现象及原因在实际操作过程中,当机器人出现转角路径故障时,系统会发出故障警报,如异常声音、灯光提示等。
通过对故障现象的观察和分析,可以初步判断故障原因。
2.故障诊断与判断(1)检查机器人控制系统:检查控制器指令是否正确,传感器信号是否正常。
(2)检查机械部件:检查转角关节磨损情况,传动部件是否损坏。
(3)检查路径规划:分析路径规划是否合理,是否存在路径干涉。
(4)检查外部环境:清除地面障碍物,调整地面摩擦力等。
3.故障处理与解决方案(1)修复控制系统故障:更换控制器、修复传感器等。
(2)更换机械部件:更换磨损关节、修复传动部件等。
(3)优化路径规划:重新规划路径,避免干涉现象。
(4)改善外部环境:清理地面障碍物,调整地面摩擦力。
三、机器人故障信息阅读技巧1.故障信息的获取与整理在处理机器人故障时,首先要了解故障相关信息,包括故障现象、发生时间、频率等。
ABB机器人控制柜的维护及常见故障处理

ABB机器人控制柜的维护及常见故障 处理
• 三、故障配排除策略 • 1、隔离故障 • 2、将故障链一分为二 • 3、选择通信参数和电揽
ABB机器人控制柜的维护及常见故障 处理
• 四、提交错误报告 • 1、诊断文件构成 • 2、创建诊断文件
ABB机器人控制柜的维护及常见故障 处理
• 四、清洁空气过滤网
过滤网
ABB机器人控制柜的维护及常见故障 处理
过滤网
ABB机器人控制柜的维护及常见故障 处理
• 一、没有事件日志信息的故障处理 • 1、启动故障 • 2、控制器死机 • 3、控制器性能低 • 4、flex pendant 死机 • 5、所有LED熄灭 • 6、 flex pendant 无法通信 • 7、维修插座中无电压 • 8、控制杆无法工作 • 9、更新固件失败
ABB机器人控制柜的维护及常见故障 处理
• 一、没有事件日志信息的故障处理 • 10、不一致的路径精确性,无法进行生产 • 11、油脂沾污电机和(或)齿轮箱 • 12、机械噪声 • 13、关机时操纵器损毁 • 14、机器人制动闸未释放
Байду номын сангаас
ABB机器人控制柜的维护及常见故障 处理
• 二、事件日志消息及处理 • 1、事件、事件日志消息 • 2、使用flex pendant 处理日志
ABB机器人控制柜的维护及常见故障 处理
ABB机器人控制柜的维护及常见故障 处理
机器人控制柜
ABB机器人控制柜的维护及常见故障 处理
• 一、熟悉保养计划表,并熟记 • 二、检查控制柜 • 1、注意事项 • 2、检查控制操作 • 三、清洁控制柜 • 1、清洁柜子之前的注意事项 • 2、控制柜外部清洁 • 3、控制柜内部清洁
机器人各品牌(abb、库卡等)示教器常见故障及维修方案

一.机器人各品牌示教器常见故障:KUKA机器人示教器常见故障:1、库卡示教器系统软件故障2、库卡示教盒无法进入系统故障3、库卡示教编程器无法启动4、库卡示教器电路板短路5、库卡示教器急停按键失效或不灵(更换急停按键)6、库卡机器人示教器触摸不良或局部不灵?(更换触摸面板)7、库卡控制面板液晶屏摔坏8、KUKA示教器液晶屏无显示?(维修或更换内部主板或液晶屏)9、KUKA?机械编程器6D鼠标/操纵杆XYZ 轴不良或不灵(更换操纵杆)10、库卡示教器液晶屏:库卡机器人示教器显示不良、竖线、竖带、花屏,摔破等(更换液晶屏)11、KUKA示教盒按键不良或不灵(更换按键面板)12、KUKA示教盒有显示无背光(更换高压板)13、库卡示教编程器数据线不能通讯或不能通电,内部有断线等ABB机器人示教器常见故障:1:ABB机器人S4、IRC5示教器触摸不良或局部不灵(更换触摸面板)2:ABB机器人S4、IRC5示教器无显示(维修或更换内部主板或液晶屏)3:ABB机器人S4、IRC5示教器显示不良、竖线、竖带、花屏,摔破等(更换液晶屏)4:ABB机器人S4、IRC5示教器按键不良或不灵(更换按键面板)5:ABB机器人S4、IRC5示教器有显示无背光(更换高压板)6:ABB机器人S4、IRC5示教器操纵杆XYZ轴不良或不灵(更换操纵杆)7:ABB机器人S4、IRC5示教器急停按键失效或不灵(更换急停按键)8:ABB机器人S4、IRC5示教器数据线不能通讯或不能通电,内部有断线等(更换数据线)二.故障现象及对应解决方案分析:故障一:触摸偏差1:手指所触摸的位置与鼠标箭头没有重合。
原因1:示教器安装完驱动程序后,在进行校正位置时,没有垂直触摸靶心正中位置。
解决1:重新校正位置。
现象2:部分区域触摸准确,部分区域触摸有偏差。
原因2:表面声波触摸屏四周边上的声波反射条纹上面积累了大量的尘土或水垢,影响了声波信号的传递所造成的。
ABB机器人常见问题和解决方法

ABB机器人常见问题和解决方法1 开机坐标系无效世界坐标系机器人维修是以***头为基点,在这种坐标系中abb 机器人所有的动作都是按照以***头为顶点来完成移动,XYZ方向切割***方向不改变,如果ABB机器人在世界坐标系中移动,***头也随着改变方向,那就是我们在开机后没有选择工具。
解决方案:配置→当前工具/基坐标→工具号→12 专家登陆一般情况,开机后我们要机器人保养编辑程序时,首先我们要登陆专家级别,有助于我们操作。
解救方案:配置→用户组→专家→登陆→密码ABB→登陆3 设置END新建程序我们发现没有终点,我们要设置终点。
解决方案:配置→杂项→编辑器→定一行DEF4 程序**条设置为home位置编辑程序时,**条指令要设为home位置,这时我们在*后可以直接找到home位置的标准,可以节省手动ABB移动机器人的操作时间。
5 手动关闭输出信号当我们在测试程序或者正常使用时(已经打开了输出信号),有时候会遇到突发情况,比如说程序路径有机器人维修撞车危险,或者预热失败,程序错误等等,这时候我们要手动关闭输出信号。
在问题解决完毕后我们可以再次用kcp打开输出信号。
(其中我们的输出信号是3是低压氧,4是高压氧,5是丙烷)解决方案:显示→输入/输出端→数字输出端→按住驱动→数(关闭或者打开)6 6D鼠标失效系统指示6D鼠标仍然有电压之类的提示,鼠标失效了,我们这时可以松开驱动,从新按下去等待驱动指示 I 变为绿色即可。
7 从电脑中拷贝程序电脑中拷贝程序,以便C盘中程序丢失后,我们可以从D盘或者外部移动U盘中拷贝使用。
解决方案:专家登陆后→按Num(此时显示器上Num为灰色,在按一下转换回来)→CTRL(2)+Esc→电脑C盘→KRC→ROBOTER→KRC →R1→Program8 机器人保养保护当机器人撞车后,会启动自动保护,也就是机器人在A6轴处有一个保护系统,当撞车后弹簧被压弯变形,系统接收到信号后会停止一切操作,此时我们无法操作机器人,这时候我们要先关掉保护开关。
ABB工业机器人控制系统故障分析及排除方法
23中国设备工程 2020.11 (下)中国设备工程C h i n a P l a n t E n g i n e e r i ng1 机器人技术概述伺服电机安装在机器人主体中。
主机和伺服模块是IRC5控制器的两个关键部分。
主机包括主板和存储设备,主机完成对机器人功能的控制。
驱动模块从主机接收命令以控制伺服电机的操作,然后机器人主体完成各种任务。
所有机器人软件都安装在CF 卡上,包括系统软件和应用程序软件。
系统软件主要由引导系统(引导程序)和Windows 操作系统组成。
Windows 操作系统是用于执行和操作整个机器人系统的平台。
系统启动时,数据将从CF 卡的内存加载到主板的RAM 中。
CF 卡存储器安装在主机背面的左下角。
示教盒和IRC5控制器是ABB 工业机器人控制系统的核心。
学习挂件用于处理与机器人系统的操作有关的许多功能(程序执行,滚动控制和机器人程序的修改)。
示教器本身也是一台完整的计算机,通过集成的电缆和连接器连接到IRC5控制器。
IRC5控制器主要由操作面板,主机,电源模块,整流器模块,I/O 模块和伺服模块组成。
IRC5控制器包含移动和控制机器人的所有必需功能。
2 ABB 工业机器人控制系统功能机器人控制系统的结构主要包括:一是主从控制。
主从控制是机器人技术的重要特征。
例如,弧焊机器人使用主从控制方法进行操作。
我使用两台计算机。
一台计算机是整个机器人系统的管理员,另一台计算机控制所有关节。
地方价值控制;二是集中控制。
集中控制属于原始的机器人控制结构,对计算机有更高的要求。
集中控制可以降低公司的生产成本,但是由于运行效率低和故障率高,这种方法逐渐淘汰了现代工业,而第三种方法是分布式控制。
分布式控制是一种广泛使用的方法,主要使用主控制计算机将整个机器人系统分为两个级别,主要是有效地管理整个主系统。
而且下一级模块具有很多CPU 。
每个板均由处理器控制。
3 机器人技术控制系统软件架构3.1 操作系统要控制机械手系统,操作系统是关键。
ABB工业机器人控制系统故障分析及排除方法
ABB工业机器人控制系统故障分析及排除方法摘要:近年来,我国的工业化进程有了很大进展,工业机器人的应用也越来越广泛。
本文以ABB工业机器人为例,首先对机器人技术进行了概述,在掌握ABB工业机器人控制系统功能的基础上,总结归纳ABB工业机器人控制系统常见故障的发生原因及排除方法。
重点分析研究特殊故障的排除方法,创新机器人维修思路。
关键词:ABB工业机器人;控制系统;故障分析;排除方法引言该课题经过建立独立的工作坐标系,通过以太网构成数据通信网络,通过工业机器人来完成轨迹的计算和跟踪,对研究机器人的运动控制系统具有比较好的指导意义。
1机器人技术的概述机器人技术的控制系统结构主要包括:一是主从式控制。
主从式控制是机器人技术的显著特征,例如弧焊机器人就是通过主从式控制方式实现作业,其利用2台计算机,一台计算机是整个机器人系统的管理者,另一台则实现对所有关节位置数值的控制;二是集中控制。
集中控制属于较早的机器人控制结构,其对计算机的要求比较高。
虽然集中控制能够降低企业生产成本,但是其运行效率比较慢,故障发生率较高,因此此种方式在现代工业领域中已经逐渐被淘汰;三是分布式控制。
分布式控制是目前所广泛采取的一种方式,其主要是将机器人整个系统分为两级,有效运用上一级主控计算机实现对所有系统的管理,下一级的模块中则具有很多CPU,每一个关节都由一个处理器进行控制。
2ABB工业机器人控制系统功能伺服电机安装于机器人本体上。
ABB工业机器人控制系统的核心部分包括示教器和IRC5控制器。
示教器用于处理与机器人系统操作相关的许多功能:运行程序、微动控制、修改机器人程序等。
示教器本身也是一个完整的计算机,通过集成电缆和连接器与IRC5控制器连接。
IRC5控制器主要由操作面板、主计算机、电源模块、整流模块、I/O模块及伺服模块等组成。
IRC5控制器包含移动和控制机器人的所有必要功能。
其中主计算机和伺服模块是IRC5控制器的两个关键部分。
ABB机器人常见故障处理

• (3)处理:建议采用以下操作 (按概率顺序列出操作) :
• 1)确保车间里的主电源正常工作并且电压符合控制器的 要求。
• 2)确保主变压器正确连接,以符合现有的主电压要求。
• 3)确保 Drive Module 中的主保险丝 (Q1) 未断开。如果 已断开,则将其复位。
• 4)如果在 Control Module 正常工作并且 Drive Module 主开关打开的情况下 Drive Module 仍无法启动,则确保 正确建立了模块之间的连接。
• (2)原因:该症状可能由以下原因引起 (各种原因按概 率的顺序列出):
• 1)未向系统提供电源。 • 2)可能未连接主变压器以获得正确的主电压。 • 3)电路断路器 F6 (如有使用)可能出现故障或者因为
任何其它原因处于开路状态。 • 4)接触器 K41 可能出现故障或者因为任何其他原因处于
开路状态,如图4-54所示。
保正确连接。
• 3) 确保 FlexPendant 与 Control Module 正确连接。 • 4)检查 Control Module 和 Drive Module 中所有单元上
的所有指示 LED。 • 5)确保与机器人通信卡 (RCC) 的所有连接和电源正常。 • 6)确保 RCC 和接线台之间的以太网线正确连接。 • 7)如果所有电缆和电源正常,并且似乎没有其它办法可
• (2)处理: • 建议操作,无 LED 指示,这可能是因为多个阶段中发生掉电。 • 操作步骤: • 1)确保系统的主电源通电并且在指定的极限之内。 • 2)确保 Drive Module 中的主变压器正确连接,以符合现有的
主电压要求。
• 3)确保打开主开关。 • 4)确保 Control Module 电源和 Drive Module 电源在各自指定
ABB机器人现场常见故障处理汇总 第一版
处理步骤: 看调漆间背压是否打开。 故障导致原因: 1、调漆间背压没有打开; 2、控制室油漆进口阀关死,未能及时打开。
12 、极限 (50050 Position outside reach)
处理步骤: (1)故障对应的机器人在OCC 上执行手动 ; (2)进入编辑程序选择下(上)一个点 ; (3) 在OCC 复位开启自动。 故障导致原因: 1、程序原因,程序问题导致无法正常喷涂,需及时通知工艺员到现场处理; 2、由于某些原因导致机器人与输送链的相对位置产生偏差,导致机器人的关节角度变化,此类偏差变量相对 较大,如偏差 达关节抱死极限,则有可能报奇点或极限。
2、奇点 (50026 ,close to singularity )
处理步骤: (1)故障所对应的机器人在OCC 上打手动; (2)在TPU上进入编辑程序选择下一个点; (3)在 OCC 上复位开启自动。 故障导致原因: 1、由于某些原因导致机器人与输送链的相对位置产生偏差,导致机器人的关节角度变化,此类偏差变量相对 较大,如偏差 达关节抱死极限,则有可能报奇点或极限。
6、 点火失败 (80001 ,flame not released)
处理步骤 : (1)在OCC上按链条停止键; (2)燃气柜电柜复位 ; (3) 启动链条 。 故障导致原因: 1、火焰控制柜故障,导致点火失败; 2、机器人火花塞故障导致接触不良,导致点火失败;
7 、 通讯中断 (133225
处理步骤:
3、 程序累积 (80001 job queue is full)
处理步骤: (1)在TPU 中删除一个错误程序; (2) 复位开启自动。 故障导致原因: 1、由于某些原因导致漏喷一车,PLC程序正常发送,漏喷该车的程序未能正常丢工件,使待喷涂队列超出一个 以上任务;
ABB机器人故障处理讲解学习
1.机器人报警“20252”,电机温度高,DRV1处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是控制柜处航空插头没插好)。
如果查不出问题,又着急用机器人,可临时将报警信号短接,不过注意,此时电机真正过热后也不会报警,可能会引起电机烧毁!!!!!!具体方式如下:在控制柜左下角找到A43板,找到板子上X5插头,上边有4根线,其中线号为439和440的两根线就是电机过热报警信号线,将两根线从中间断开,把板子这边的两根线短接即可。
2. 检查工控机主板是否正常的方法:工控机上有3个LED 灯,如下图所示1号灯为电源指示灯,只要电源打到开位此灯就常亮,如此灯不亮则检查工控机电源是否正常。
2号灯为开机程序引导指示灯,开机过程中闪烁,开机完成后灯灭。
开机程序保存在存储卡中,如开机过程中此灯不闪烁,则可能是存储卡故障。
1 2 3存储卡3号灯为主板状态指示灯,开机过程中先是红灯闪烁,后变为绿灯闪烁,最后绿灯常亮,如果此灯最后显示红色或者不亮,则主板有问题,如果按上述过程依次点亮,则证明主板是正常的。
3.如果机器人系统异常或崩溃,可先尝试用“B启动”重新启动,即可恢复到最近的正产状态。
具体方法如下:点击示教器右上角ABB图标,点击重新启动4.机器人I/O状态都丢失,检查控制柜中I/O板,在控制柜柜门的右下角,检查板子上的指示灯是否点亮,如果灯都不亮则检查I/O 板的电源和电源的保险(如下红色箭头所示),如果只是个别I/O 丢失,则查看板子上对应的接线端子,看线是否松动。
5.如果一垛铝锭抓取完了,机器人还继续往下抓,检查轨道末端的光电眼,看其是不是没有对正对侧的反光板,或者是光电眼损坏。
6.如果机器人在自动运行过程中突然不动了,需要查看示教器上显示的程序运行位置,看是否在等待某一I/O信号,然后检查相应的信号源是否正常。
7.如果外部急停按钮都已经解开而机器人一直报紧急停止,则检查控制柜右侧壁右上角的板子(panel board),X1端子的3、4号端子控制机器人的紧急停止,如果3、4号端子之间的连线断开,机器人就报紧急停止。
ABB机器人常见问题和解决方法
ABB机器人常见问题和解决方法ABB机器人常见问题和解决方法1 开机坐标系无效世界坐标系机器人维修是以***头为基点,在这种坐标系中abb 机器人所有的动作都是按照以***头为顶点来完成移动,XYZ方向切割***方向不改变,如果ABB机器人在世界坐标系中移动,***头也随着改变方向,那就是我们在开机后没有选择工具。
解决方案:配置→当前工具/基坐标→工具号→12 专家登陆一般情况,开机后我们要机器人保养编辑程序时,首先我们要登陆专家级别,有助于我们操作。
解救方案:配置→用户组→专家→登陆→密码ABB→登陆3 设置END新建程序我们发现没有终点,我们要设置终点。
解决方案:配置→杂项→编辑器→定一行DEF4 程序**条设置为home位置编辑程序时,**条指令要设为home位置,这时我们在*后可以直接找到home位置的标准,可以节省手动ABB移动机器人的操作时间。
5 手动关闭输出信号当我们在测试程序或者正常使用时(已经打开了输出信号),有时候会遇到突发情况,比如说程序路径有机器人维修撞车危险,或者预热失败,程序错误等等,这时候我们要手动关闭输出信号。
在问题解决完毕后我们可以再次用kcp打开输出信号。
(其中我们的输出信号是3是低压氧,4是高压氧,5是丙烷)解决方案:显示→输入/输出端→数字输出端→按住驱动→数(关闭或者打开)6 6D鼠标失效系统指示6D鼠标仍然有电压之类的提示,鼠标失效了,我们这时可以松开驱动,从新按下去等待驱动指示 I 变为绿色即可。
7 从电脑中拷贝程序电脑中拷贝程序,以便C盘中程序丢失后,我们可以从D盘或者外部移动U盘中拷贝使用。
解决方案:专家登陆后→按Num(此时显示器上Num为灰色,在按一下转换回来)→CTRL(2)+Esc→电脑C盘→KRC→ROBOTER→KRC →R1→Program8 机器人保养保护当机器人撞车后,会启动自动保护,也就是机器人在A6轴处有一个保护系统,当撞车后弹簧被压弯变形,系统接收到信号后会停止一切操作,此时我们无法操作机器人,这时候我们要先关掉保护开关。
ABB机器人常见故障处理
A B B机器人常见故障处理1:在什么情况下需要为机器人进行备份处理方式:1、新机器第一次上电后。
2、在做任何修改之前。
3、在完成修改之后。
4、如果机器人重要,定期1周一次。
5、最好在U盘也做备份。
6、太旧的备份定期删除,腾出硬盘空间。
2:机器人出现报警提示信息10106维修时间提醒是什么意思处理方式:这个是ABB机器人智能周期保养维护提醒,需要联系厂家进行机器人保养。
3:机器人在开机时进入了系统故障状态应该如何处理处理方式:1、重新启动一次机器人。
2、如果不行,在示教器查看是否有更详细的报警提示,并进行处理。
3、重启。
4、如果还不能解除则尝试B启动。
5、如果还不行,请尝试P启动。
6、如果还不行请尝试I启动(这将机器人回到出厂设置状态,小心)。
4:什么是机器人机械原点机械原点在哪里处理方式:机器人六个伺服电机都有一个唯一固定的机械原点,错误的设定机器人机械原点将会造成机器人动作受限或误动作,无法走直线等问题,严重的会损坏机器人。
5:机器人第一次上电开机报警“50296,SMB内存数据差异”怎么办处理方式:1ABB主菜单中选择校准。
2点击ROB_1进入校准画面,选择SMB内存。
3选择"高级",进入后点击"清除控制柜内存"。
4完成后点击"关闭",然后点击"更新"。
5选择"已交换控制柜或机械手,使用SMB内存数据更新控制柜"。
6、机器人报警“20252”,电机温度高,DRV1处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是控制柜处航空插头没插好)。
如果查不出问题,又着急用机器人,可临时将报警信号短接,不过注意,此时电机真正过热后也不会报警,可能会引起电机烧毁!7、如果机器人系统异常或崩溃,可先尝试用“B启动”重新启动,即可恢复到最近的正产状态。
处理方式:点击示教器右上角ABB图标,点击重新启动8、机器人I/O状态都丢失处理方式:检查控制柜中I/O板,在控制柜柜门的右下角,检查板子上的指示灯是否点亮,如果灯都不亮则检查I/O板的电源和电源的保险(如下红色箭头所示),如果只是个别I/O丢失,则查看板子上对应的接线端子,看线是否松动。
ABB机器人IRB6640伺服电机维修的常见故障

ABB机器人IRB6640伺服电机维修的常见故障
ABB机器人IRB6640 3HAC4431-1/06伺服电机(SERVO MOTOR )是指在ABB机器人伺服系统中控制机械手臂运转的发动机,是一种补助马达间接变速装置。
ABB机器人伺服电机可使控制速度,位置,精度非常准确,可以将电压信号转化为转矩和转速以驱动ABB 机器人手臂运转。
ABB机器人3HAC4431-1/06伺服马达维修、ABB机器人3HAC4431-1/06外部轴电机维修、ABB IRB6640机器人电机维修常见故障:
1、ABB机器人IRB6640伺服电机磁铁爆缸破碎掉卡死转不动或轴承卡死
2、IRB6640机器人3HAC4431-1/06伺服电机维修线圈匝间短路,输出不平衡
3、ABB机器人IRB6640外部轴电机维修出现失磁,运转无力低速(空载)
4、伺服电机编码器线圈短路,编码器报警
5、伺服电机刹车失灵,抱闸卡死
6、噪音响声大、卡死住转不动
7、IRB6640机器人外部轴电机转子断开外调同心度弯曲
8、通电就报警跳闸维修
9、IRB6640机器人3HAC4431-1/06伺服马达维修出现位置不准、原点错乱跑偏
位输出不平衡
10、3HAC4431-1/06伺服马达运行抖动,失磁、失灵烧坏刹车盘磨损
11、响声过大嗡嗡响机体发热发烫噪音过大
12、更换轴承、转子、定子
13、ABB机器人IRB6640 3HAC4431-1/06伺服电机维修出现可以用一段(一会)时间就报警关机(断电)重启又可以用一段(一会)时间就又报警,电机不能启动、启动无力、有噪音、运行抖动、过流、过载、跑位、输出不平衡、位置不准等。
ABB机器人的错误处理

ABB机器人的错误处理ABB机器人的错误处理ABB机器人的错误处理errnum 数据类型errnum用于描述在执行过程中,发生的所有可恢复的错误。
例如程序执行时,被零除。
如果机器人程序执行过程中检测到一个错误,错误非致命,可以被错误处理程序处理。
这类错误的典型例子是过大的值或者被零除。
errnum 类型的系统变量errno,根据不同的错误性质,分配不同的值。
错误处理程序可以通过读取这个变量来纠正错误,然后执行程序可以正确的方式继续运行。
错误也可以通过使用RAISE指令在程序中创建。
错误处理程序通过指定一个能检测到该特定类型的错误号(范围1-90内或通过BookErrNo指令预订)作为RAISE的参数。
示例:reg1 := reg2 / reg3;...ERRORIF ERRNO = ERR_DIVZERO THENreg3 := 1;RETRY;ENDIF如果REG3= 0,机器人除法时检测到发生的错误。
这个错误可以被检测并通过分配REG3的值为1予以纠正。
因此除法可再次被执行,程序可以继续执行。
CONST errnum machine_error := 1;...IF di1=0 RAISE machine_error;...ERRORIF ERRNO=machine_error RAISE;机器人通过信号DI1检测出现的错误。
跳转到错误处理程序。
调用的错误处理程序调,纠正这个错误。
machine_error 作为一个常数,用来让错误处理程序确切知道发生的是哪种错误的类型。
预定义的错误类型系统变量ERRNO 可以用于读取最后一次发生的错误。
许多预定义常量可以用来确定发生的错误类型。
(ABB 编程手册1179 page)关于raiseRAISE用于在程序中产生一个错误,并调用程序的错误处理函数。
RAISE 同样可以在错误处理函数中使用,将当前错误传送给调用程序的错误处理函数。
这个指令可以用于跳回高一层的程序结构,例如,底层的错误返给主程序的错误处理函数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABB机器人常见故障处理
1:在什么情况下需要为机器人进行备份?
处理方式:1、新机器第一次上电后。
2、在做任何修改之前。
3、在完成修改之后。
4、如果机器人重要,定期1周一次。
5、最好在U盘也做备份。
6、太旧的备份定期删除,腾出硬盘空间。
2:机器人出现报警提示信息10106维修时间提醒是什么意思?
处理方式:这个是ABB机器人智能周期保养维护提醒,需要联系厂家进行机器人保养。
3:机器人在开机时进入了系统故障状态应该如何处理?
处理方式:1、重新启动一次机器人。
2、如果不行,在示教器查看是否有更详细的报警提示,并进行处理。
3、重启。
4、如果还不能解除则尝试 B 启动。
5、如果还不行,请尝试 P 启动。
6、如果还不行请尝试 I 启动(这将机器人回到出厂设置状态,小心)。
4:什么是机器人机械原点?机械原点在哪里?
处理方式:机器人六个伺服电机都有一个唯一固定的机械原点,错误的设定机器人机械原点将会造成机器人动作受限或误动作,无法走直线等问题,严重的会损坏机器人。
5:机器人第一次上电开机报警“50296, SMB 内存数据差异”怎么办?
处理方式:1 ABB主菜单中选择校准。
2 点击ROB_1进入校准画面,选择SMB内存。
3 选择"高级",进入后点击"清除控制柜内存"。
4 完成后点击"关闭",然后点击"更新"。
5 选择"已交换控制柜或机械手,使用SMB内存数据更新控制柜"。
6、机器人报警“20252”,电机温度高,DRV1
处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是控制柜处航空插头没插好)。
如果查不出问题,又着急用机器人,可临时将报警信号短接,不过注意,此时电机真正过热后也不会报警,可能会引起电机烧毁!
7、如果机器人系统异常或崩溃,可先尝试用“B启动”重新启动,即可恢复到最近的正产状态。
处理方式:点击示教器右上角ABB图标,点击重新启动
8、机器人I/O状态都丢失
处理方式:检查控制柜中I/O板,在控制柜柜门的右下角,检查板子上的指示灯是否点亮,如果灯都不亮则检查I/O板的电源和电源的保险(如下红色箭头所示),如果只是个别I/O 丢失,则查看板子上对应的接线端子,看线是否松动。
9、机器人运行过程中,由于异常停止无法自动运行程序
处理方法:先将机器人打到手动状态,然后在选择“PP TO MAIN”,再重新打至自动状态后程序即可从第一行重新开始执行,然后在设备面板上选择回原位即可。
欢迎您的下载,
资料仅供参考!
致力为企业和个人提供合同协议,策划案计划书,学习资料等
等
打造全网一站式需求。